
An appearance-based visual compass for mobile robots Jürgen Sturm University of Amsterdam...
34
An appearance-based An appearance-based visual compass visual compass for mobile robots for mobile robots Jürgen Sturm Jürgen Sturm University of Amsterdam Informatics Institute
-
Upload
chrystal-price -
Category
Documents
-
view
215 -
download
0
Transcript of An appearance-based visual compass for mobile robots Jürgen Sturm University of Amsterdam...

An appearance-based An appearance-based visual compass visual compass
for mobile robotsfor mobile robots
Jürgen SturmJürgen Sturm
University of AmsterdamInformatics Institute

OverviewOverview Introduction to Mobile RoboticsIntroduction to Mobile Robotics
Background (RoboCup, Dutch Aibo Team)Background (RoboCup, Dutch Aibo Team)
ApproachApproach
ResultsResults
ConclusionsConclusions
2

Mobile robotsMobile robots
SICO at Kosair Children's Hospital Dometic, Louisville, Kentucky
Sony Aibos playing soccerCinekids, De Balie, Amsterdam
Robot cranes and trucks unloading shipsPort of Rotterdam
RC3000, the robocleanerKärcher

Challenge Application: Challenge Application: Robot SoccerRobot Soccer
4

Robot localizationRobot localization
Robot Robot localizationlocalization.. is the problem of estimating the robot’s .. is the problem of estimating the robot’s
pose relative to a map of the pose relative to a map of the environment.environment.
Probabilistic approachesProbabilistic approaches NoiseNoise AmbiguityAmbiguity UncertaintyUncertainty
5

DesignDesign
SensorsSensors Wheelsensors, GPS, Laserscanner, Wheelsensors, GPS, Laserscanner,
Camera..Camera.. Feature spaceFeature space
Map and Belief RepresentationMap and Belief Representation Grid-based Maps, Topological graphsGrid-based Maps, Topological graphs Single/Multi Hypothesis TrackersSingle/Multi Hypothesis Trackers
FiltersFilters Kalman Filter, Monte-Carlo MethodsKalman Filter, Monte-Carlo Methods
6

Design of Classical Design of Classical ApproachesApproaches
Artificial environmentsArtificial environments (Electro-magnetic) guiding lines(Electro-magnetic) guiding lines (Visual) landmarks(Visual) landmarks
Special sensorsSpecial sensors GPSGPS Laser-range-scannersLaser-range-scanners Omni-directional camerasOmni-directional cameras
Computationally heavyComputationally heavy offline computationoffline computation
7

Design of New ApproachDesign of New Approach
Natural environmentsNatural environments Human environmentsHuman environments Unstructured and unknown for the robotUnstructured and unknown for the robot
Normal sensorsNormal sensors CameraCamera
Reasonable requirementsReasonable requirements Real-timeReal-time On-boardOn-board
8

Platform: Sony AiboPlatform: Sony Aibo
Internal camera•30fps•208x160 pixels
Computer•64bit RISC processor•567 MHz•64 MB RAM•16 MB memorystick•WLAN
Actuators•Legs: 4 x 3 joints•Head: 3 joints
9

ApproachApproach
10

Demo VideoDemo VideoVisual CompassVisual Compass
11

Approach - SynopsisApproach - Synopsis
12

Localization Filter
tu tz
1( )tp 1( | , , )t t t tp u z
Raw image Color class imageSector-based
feature extraction
Motion Model
1, ( | , )t t t tu p u
EstimatedMotionM
otio
n da
taIm
age
data Previously learned
map
1( | , )t t tp u
prior odometry-corrected posterior
Sensor Model
CorrelationLikelihoods
, ( | , )t t tz p z m
13

Sector-based feature Sector-based feature extraction (1)extraction (1)
Camera field of view: 50°Head field of view: 230°
14

Sector-based feature Sector-based feature extraction (2)extraction (2)
For each sector: For each sector: Count color class transitions in vertical Count color class transitions in vertical
directiondirection Compute relative transition frequenciesCompute relative transition frequencies
15

Sensor model (1)Sensor model (1) Relative frequency of Relative frequency of
transitions from color class i transitions from color class i to color class j in direction φto color class j in direction φ
Frequency measurements Frequency measurements originate from a originate from a probabilistic source probabilistic source (distribution)(distribution)
How to approximate these How to approximate these distributions?distributions?
,
0 ( ) 1
( ) 1
ijt
ijt
i j
z
z
( ) ~ ( )ij ijtz Z
16

Sensor model (2)Sensor model (2)
Approximate source by a histogram Approximate source by a histogram distribution distribution
(parameters constitute the map)(parameters constitute the map)
-11
-2 12
( 1)1
if 2
if 2 21( )
if 2 2
ijij
ijijij
ij binsijk ij bins bins
k bins ij
m z
m zp z m
mm z
(1) (2) ( )( ) [ ; ; ]ij ij ij ijkZ m m m
( )tp z
tz
17
(1)ijm
(2)ijm

Sensor model (2)Sensor model (2) Likelihood that a single Likelihood that a single
frequency measurement frequency measurement originated from direction originated from direction φφ
Likelihood that a full Likelihood that a full feature vector (one sector) feature vector (one sector) originated from direction originated from direction φφ
Likelihood that a camera Likelihood that a camera image (set of features) image (set of features) originated from direction originated from direction φφ
( ) | ( )ij ijtp z m
,
( ) | ( )
( ) | ( )
t
ij ijt
i j
p z m
p z m
18

Sensor model (2)Sensor model (2) Likelihood that a single Likelihood that a single
frequency measurement frequency measurement originated from direction originated from direction φφ
Likelihood that all Likelihood that all frequency measurements frequency measurements originated from direction originated from direction φφ
Likelihood that whole Likelihood that whole camera image originated camera image originated from direction φfrom direction φ
( ) | ( )ij ijtp z m
,
( ) | ( )
( ) | ( )
t
ij ijt
i j
p z m
p z m
/ 2
/ 2
[ / 2, / 2] |
( ) | ( )
t
FOV
t
FOV
p z FOV FOV m
p z m d

Localization filterLocalization filterOrientational componentOrientational component
Use a Bayesian Filter to update Use a Bayesian Filter to update robot‘s beliefs (circular grid buffer)robot‘s beliefs (circular grid buffer)
From this buffer, extract per time From this buffer, extract per time stepstep Heading estimateHeading estimate Variance estimateVariance estimate
1( )tp 1( | , , )t t t tp u z 1( | , )t t tp u
prior odometry-corrected posterior20
1, ( | , )t t t tu p u , ( | , )t t tz p z m
( ) ( , )tp N

ResultsResults
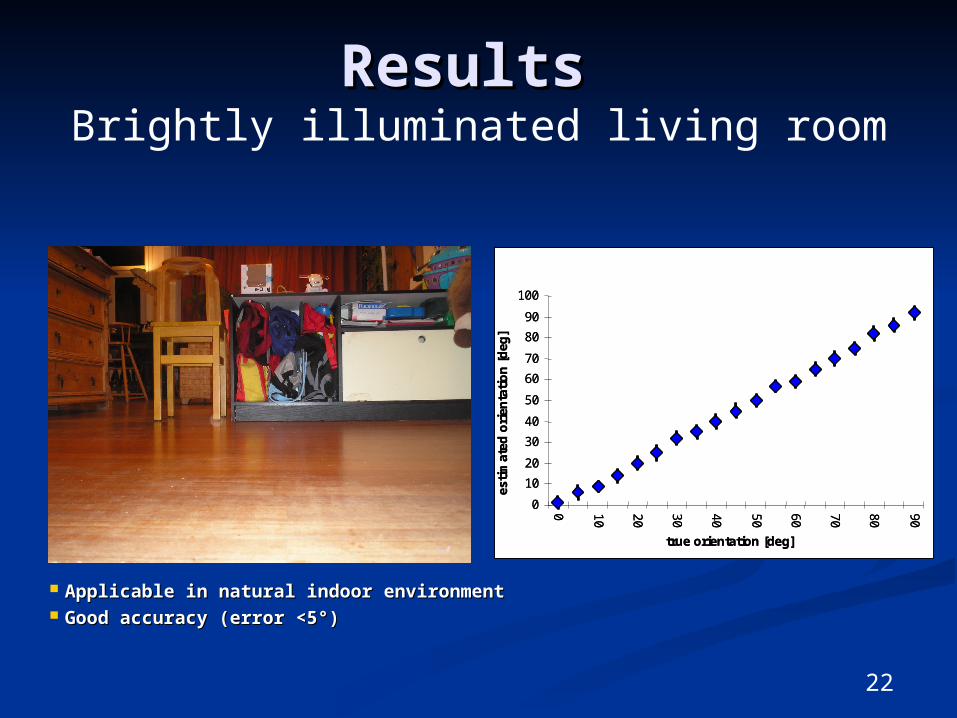
ResultsResults Brightly illuminated living room
0
10
20
30
40
50
60
70
80
90
100
0 10 20
30 40 50
60 70 80
90
true orientation [deg]
esti
mat
ed o
rien
tati
on
[d
eg]
0
10
20
30
40
50
60
70
80
90
100
0 10 20
30 40 50
60 70 80
90
true orientation [deg]
esti
mat
ed o
rien
tati
on
[d
eg]
Applicable in natural indoor environmentApplicable in natural indoor environment Good accuracy (error <5°)Good accuracy (error <5°)
22

Results Results Daylight office environment
Applicable in natural office environmentApplicable in natural office environment Very robust against displacement Very robust against displacement
(error <20° over 15m)(error <20° over 15m)
-40
-30
-20
-10
0
10
20
30
40
-720
-560
-400
-240
-80
80 240
400
560
distance from training spot [cm]er
ror
in o
rien
tati
on
[d
eg]
0-40
-30
-20
-10
0
10
20
30
40
-720
-560
-400
-240
-80
80 240
400
560
distance from training spot [cm]er
ror
in o
rien
tati
on
[d
eg]
0
23

Results Results Outdoor soccer field
Applicable in natural outdoor environmentApplicable in natural outdoor environment
24

Results Results RoboLab RoboLab 4-Legged soccer field
Applicable in RoboCup soccer environmentApplicable in RoboCup soccer environment
25
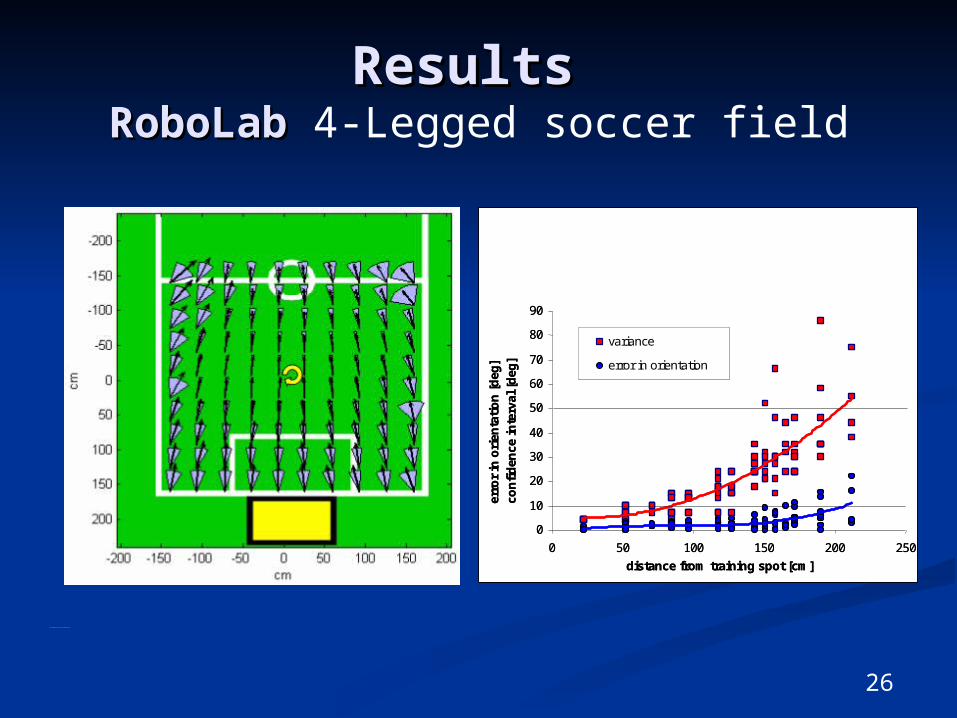
Results Results RoboLab RoboLab 4-Legged soccer field
0
10
20
30
40
50
60
70
80
90
0 50 100 150 200 250
distance from training spot [cm]
erro
r in
ori
enta
tio
n [
deg
]
con
fid
ence
in
terv
al [
deg
]
variance
error in orientation
0
10
20
30
40
50
60
70
80
90
0 50 100 150 200 250
distance from training spot [cm]
erro
r in
ori
enta
tio
n [
deg
]
con
fid
ence
in
terv
al [
deg
]
variance
error in orientation
True average error <10° on a grid of 3x3mTrue average error <10° on a grid of 3x3m
26

Results Results Variable and Parameter StudiesVariable and Parameter Studies
Distance to training spotDistance to training spot Changes in illuminationChanges in illumination
Angular resolutionAngular resolution Scanning grid coverageScanning grid coverage Number of color classesNumber of color classes
27

Localization filterLocalization filterTranslational componentTranslational component
Use multiple training spotsUse multiple training spots Each (projectively distorted) patch Each (projectively distorted) patch
yields slightly different likelihoodsyields slightly different likelihoods
Interpolate translation from these Interpolate translation from these likelihoodslikelihoods
Visual HomingVisual Homing
28

Demo VideoDemo VideoVisual HomingVisual Homing
29

Results Results Visual HomingVisual Homing
-100
-75
-50
-25
0
25
50
75
100
-100 -75 -50 -25 0 25 50 75 100
x [cm]
y [c
m]
Positioning accuracy
cm
cm
cm
cm
37.15
73.16
09.12
30.22
Robot walks back to center after kidnap
Proof of conceptProof of concept
30

ConclusionsConclusions Novel approach to localization:Novel approach to localization:
Works in unstructured Works in unstructured environmentsenvironments
Accurate, robust, efficient, Accurate, robust, efficient, scaleablescaleable
Interesting approach for mobile Interesting approach for mobile robotsrobots

Future ResearchFuture Research
Use Monte-Carlo LocalizationUse Monte-Carlo Localization Extend to dynamic environmentsExtend to dynamic environments Triangulation from two training spotsTriangulation from two training spots
Announced succeeding projects:Announced succeeding projects: Port to RoboCup Rescue Simulation Port to RoboCup Rescue Simulation
(MSc. Project)(MSc. Project) RoboCup 2007 Open Challenge (DOAS RoboCup 2007 Open Challenge (DOAS
Project)Project)32

3rd Prize Technical 3rd Prize Technical ChallengesChallenges
of the of the 4-Legged League, RoboCup 2006 4-Legged League, RoboCup 2006 in Bremenin Bremen
33

Thank You!Thank You!















![Autonomous Navigation for Flying Robots Lecture 7.2 ...jsturm.de/publications/data/lecture_7_part_2.pdf · Visual Odometry using PTAM [Weiss et al., ICRA 2012] Jürgen Sturm Autonomous](https://static.fdocuments.us/doc/165x107/5fa043276bafd86f4106a194/autonomous-navigation-for-flying-robots-lecture-72-visual-odometry-using-ptam.jpg)

