
AMELIORATION DE LA DETECTION ULTRASONORE …€¦ · Après acquisition de la matrice de réponse...
13
1 AMELIORATION DE LA DETECTION ULTRASONORE DE DEFAUT PAR REDUCTION DE DIFFUSION MULTIPLE AVEC DES CAPTEURS MULTI-ELEMENTS : APPLICATION SUR UN ALLIAGE A BASE NICKEL C. Trottier 1 , S. Shahjahan 1 , F. Rupin 1 , A. Aubry 2 , A. Derode 2 1 EDF R&D-Site des Renardières- Moret sur Loing (77) ²Institut Langevin- Paris (75) RESUME Lors des contrôles ultrasonores sur les matériaux polycristallins, les signaux enregistrés peuvent présenter un bruit de structure lié à la diffusion multiple des ondes acoustiques sur les joints de grains. Ceci conduit à une dégradation mal maîtrisée du faisceau, limitant les performances des méthodes ultrasonores classiques à détecter la présence de défauts. Le travail présenté ici a pour objectif de réduire l’influence de la diffusion multiple afin d’accéder à l’information utile. Après acquisition de la matrice de réponse du milieu à l’aide d’un capteur multi-éléments, un filtrage fondé sur la théorie des matrices aléatoires, a été appliqué sur un bloc en alliage à base nickel. La maquette présente une microstructure très pénalisante pour le contrôle et contient des défauts volumiques calibrés à différentes profondeurs. Les résultats obtenus avec une barrette linéaire de 64 voies et 5 MHz de fréquence centrale montrent une amélioration importante aussi bien du taux de détection que du rapport signal sur bruit en comparaison à d’autres techniques multi -éléments choisies comme références telle que la méthode FTP (Focalisation en Tout Point). INTRODUCTION Le contrôle ultrasonore des matériaux polycristallins que l’on peut trouver dans l’industrie nucléaire représente un défi scientifique important pour EDF. En effet, ces matériaux (soudures en acier inoxydable austénitique, alliages à base nickel, aciers austéno-ferritiques moulés…) sont couramment utilisés dans les composants du circuit primaire mais restent difficiles à contrôler car l’interaction de l’onde incidente avec la microstructure est complexe et conduit à une dégradation mal maîtrisée du faisceau lors de sa propagation. En particulier, dans le cas où la taille caractéristique des grains est de l’ordre de la longueur d’onde, la diffusion de l’onde ultrasonore aux joints de grains a pour conséquence une atténuation de l’onde et l’apparition d’un bruit dit « de structure » qui gêne sensiblement l’inspection de la pièce [1, 2]. La propagation des ondes en milieux diffusants a fait l’objet de nombreuses études avec pour but à la fois d’améliorer le rapport signal sur bruit dans les matériaux fortement diffusants et de développer des modèles théoriques ou numériques de bruit de structure [3- 7]. Dans le cas des contrôles ultrasonores, le développement des capteurs multi-éléments a ouvert la voie à de nouvelles études expérimentales en permettant d’enregistrer une quantité importante d’informations sur les matériaux sondés. Une approche de plus en plus utilisée dans le monde des CND est fondée sur l’acquisition de la matrice de transfert, K, mesurée à l’aide d’un réseau d’éléments à la fois émetteurs et récepteurs. Cette technique, parfois appelée « Full Matrix Capture » ou FMC, permet d’obtenir une matrice qui contient toute l’information disponible sur le milieu inspecté. Un certain nombre d’opérations de traitement de signal peut alors lui être appliquée en post-traitement de façon à en retirer l’information considérée comme pertinente. Récemment, une méthode de traitement du signal fondée sur la théorie des matrices aléatoires a été développée par Aubry et al. [8, 9] afin de séparer les contributions de More info about this article: http://www.ndt.net/?id=16243
Transcript of AMELIORATION DE LA DETECTION ULTRASONORE …€¦ · Après acquisition de la matrice de réponse...

1
AMELIORATION DE LA DETECTION ULTRASONORE DE DEFAUT PAR REDUCTION DE DIFFUSION MULTIPLE AVEC DES CAPTEURS
MULTI-ELEMENTS : APPLICATION SUR UN ALLIAGE A BASE NICKEL
C. Trottier1, S. Shahjahan1, F. Rupin1, A. Aubry2, A. Derode2
1EDF R&D-Site des Renardières- Moret sur Loing (77) ²Institut Langevin- Paris (75)
RESUME
Lors des contrôles ultrasonores sur les matériaux polycristallins, les signaux enregistrés peuvent présenter un bruit de structure lié à la diffusion multiple des ondes acoustiques sur les joints de grains. Ceci conduit à une dégradation mal maîtrisée du faisceau, limitant les performances des méthodes ultrasonores classiques à détecter la présence de défauts. Le travail présenté ici a pour objectif de réduire l’influence de la diffusion multiple afin d’accéder à l’information utile. Après acquisition de la matrice de réponse du milieu à l’aide d’un capteur multi-éléments, un filtrage fondé sur la théorie des matrices aléatoires, a été appliqué sur un bloc en alliage à base nickel. La maquette présente une microstructure très pénalisante pour le contrôle et contient des défauts volumiques calibrés à différentes profondeurs. Les résultats obtenus avec une barrette linéaire de 64 voies et 5 MHz de fréquence centrale montrent une amélioration importante aussi bien du taux de détection que du rapport signal sur bruit en comparaison à d’autres techniques multi-éléments choisies comme références telle que la méthode FTP (Focalisation en Tout Point).
INTRODUCTION
Le contrôle ultrasonore des matériaux polycristallins que l’on peut trouver dans l’industrie nucléaire représente un défi scientifique important pour EDF. En effet, ces matériaux (soudures en acier inoxydable austénitique, alliages à base nickel, aciers austéno-ferritiques moulés…) sont couramment utilisés dans les composants du circuit primaire mais restent difficiles à contrôler car l’interaction de l’onde incidente avec la microstructure est complexe et conduit à une dégradation mal maîtrisée du faisceau lors de sa propagation. En particulier, dans le cas où la taille caractéristique des grains est de l’ordre de la longueur d’onde, la diffusion de l’onde ultrasonore aux joints de grains a pour conséquence une atténuation de l’onde et l’apparition d’un bruit dit « de structure » qui gêne sensiblement l’inspection de la pièce [1, 2]. La propagation des ondes en milieux diffusants a fait l’objet de nombreuses études avec pour but à la fois d’améliorer le rapport signal sur bruit dans les matériaux fortement diffusants et de développer des modèles théoriques ou numériques de bruit de structure [3-7]. Dans le cas des contrôles ultrasonores, le développement des capteurs multi-éléments a ouvert la voie à de nouvelles études expérimentales en permettant d’enregistrer une quantité importante d’informations sur les matériaux sondés. Une approche de plus en plus utilisée dans le monde des CND est fondée sur l’acquisition de la matrice de transfert, K, mesurée à l’aide d’un réseau d’éléments à la fois émetteurs et récepteurs. Cette technique, parfois appelée « Full Matrix Capture » ou FMC, permet d’obtenir une matrice qui contient toute l’information disponible sur le milieu inspecté. Un certain nombre d’opérations de traitement de signal peut alors lui être appliquée en post-traitement de façon à en retirer l’information considérée comme pertinente. Récemment, une méthode de traitement du signal fondée sur la théorie des matrices aléatoires a été développée par Aubry et al. [8, 9] afin de séparer les contributions de
Mor
e in
fo a
bout
this
art
icle
: ht
tp://
ww
w.n
dt.n
et/?
id=
1624
3
2
diffusion simple et de diffusion multiple, et ainsi réduire l’influence de cette dernière. Cette technique repose sur l’étude de la statistique des valeurs singulières i de la matrice de réponse K du milieu. Développée et validée sur des milieux modèles (fluides contenant un grand nombre de diffuseurs cylindriques), cette technique, appelée MSF-DORT (Multiple Scattering Filtered DORT) appliquée aux aciers polycristallins a donné des résultats très prometteurs en termes d’amélioration de performances de détection de défauts volumiques [10, 11]. L’objet de ce travail est donc de poursuivre les travaux sur le filtrage de la diffusion afin de repousser encore plus loin les limites du procédé. En particulier, dans cette étude, nous nous sommes intéressés à la détectabilité de défauts situés à très fortes profondeurs (70 et 80 mm) dans un milieu fortement diffusant, la taille des grains, de l’ordre du mm, étant comparable à la longueur d’onde.
PRINCIPE ET METHODE
Méthode DORT (Décomposition de l’Opérateur de Retournement Temporel) La décomposition de l’opérateur de retournement temporel (DORT) est une technique utilisant la matrice de réponse du milieu afin notamment de détecter sélectivement des cibles [12, 13]. Cette matrice, notée K, contient toutes les informations mesurables avec le capteur utilisé. Elle peut être acquise à l’aide d’une barrette linéaire à N éléments par FMC (Full Matrix Capture). La FMC consiste en l’émission d’une impulsion par un élément de la barrette puis en la réception de la réponse du milieu par tous les éléments simultanément. L’opération est ensuite renouvelée pour les N éléments du capteur. Les N² signaux ainsi obtenus sont rangés dans une matrice H(t). Un passage dans le domaine fréquentiel (via une analyse temps-fréquence) permet alors d’obtenir une nouvelle matrice complexe, notée K(T,f) de dimension N par N pour chaque temps T et fréquence f. K peut ainsi être utilisée pour la détection de cible grâce à la méthode DORT. La méthode DORT repose sur la décomposition en valeurs singulières (SVD – Singular Value Decomposition) de la matrice de réponse pour tous les temps T et les fréquences f. En effet, la matrice K peut être écrite comme K=U.S.V où U et V sont des matrices unitaires contenant les vecteurs singuliers et S est une matrice diagonale contenant les valeurs singulières de K au temps T et à la fréquence f. Dans le cas simple d’un milieu homogène contenant un nombre de diffuseurs (de petite taille devant la longueur d’onde) inférieur à N et où la diffusion multiple peut être négligée, il est possible d’associer de façon biunivoque chaque diffuseur à une valeur singulière et un vecteur singulier [13]. Fondamentalement, la
valeur singulière i est proportionnelle à la réflectivité du ième diffuseur et le vecteur singulier correspondant donne le jeu d’amplitudes et de retards à transmettre à la barrette multi-éléments pour focaliser sur ce diffuseur précis. L’image Ii de la cible i au temps T et à la
fréquence f est construite par le produit Ii(T,f)=i|Vi(T,f)G*(T,f)| où G est la matrice associée à la fonction de Green du milieu homogène ambiant. Pour obtenir l’image sur l’ensemble de la bande passante du capteur, il suffira alors de sommer les contributions de toutes les fréquences : 荊件(劇) = �件(劇,血) �件 劇, 血 × �∗(劇,血) 血 (1)
Si cette méthode se révèle efficace dans des milieux homogènes ou des matériaux peu diffusants [13, 14], elle atteint ses limites en présence de diffusion multiple. En effet, lorsque le bruit de structure domine, les espaces propres associés aux valeurs singulières non nulles ne sont plus reliés directement à des diffuseurs spécifiques, mais peuvent être liés au bruit de structure. Le problème est alors de séparer les contributions des diffusions simple et multiple.

3
En conséquence, l’utilisation de la méthode DORT pour la détection de défauts en milieu bruité nécessite une étape préalable de filtrage de la diffusion multiple présente dans la matrice K.
Filtrage de la diffusion multiple K(T,f) est la somme des contributions de toutes les ondes qui arrivent au transducteur dans la fenêtre de temps [t-T/2;t+T/2], à la fréquence f. En général, les signaux contiennent à la fois une contribution de diffusion simple (SS, pour simgle scattering) et une contribution de diffusion multiple (MS, pour multiple scattering), de telle sorte que l’on peut écrire K=KSS+KMS. L'écho direct provenant d’un défaut enfoui dans un milieu multiplement diffusant est contenu dans KSS. Au contraire, le bruit de structure est contenu à la fois dans KSS et dans KMS. Pour améliorer la détection de l’écho direct, il est nécessaire de diminuer au maximum la contribution de KMS. Aubry et al. ont montré qu'il existait deux comportements distincts selon que KSS ou KMS domine [15]. Dans le cas où la diffusion multiple domine, K peut être assimilée à une matrice aléatoire dite classique, alors que si c'est la diffusion simple qui est dominante la matrice K se rapproche du comportement d’une matrice dite de Hankel. Ceci a deux conséquences :
premièrement, la distribution des valeurs singulières, () est différente en régime de diffusion multiple et en régime de diffusion simple. Deuxièmement, en régime de diffusion simple, les coefficients kab de la matrice K vérifient la propriété suivante : quelle que soit la réalisation du désordre, il existe une relation de phase entre les coefficients de K le long d'une même anti-diagonale, c’est-à-dire, pour les couples émetteur (a) et récepteur (b) tel que a+b est une constante. Cette relation de phase s’exprime ainsi : 紅� =
倦�−� ,�+�倦�� = 結�� 倹2�(��)2�迎 (2)
Avec la longueur d’onde utilisée, mp=(xa-xb)/2, xa et xb sont respectivement la position de l'émetteur et du récepteur, R=cT/2 et p est l'espace inter-éléments du capteur. L'équation (2) implique que quel que soit le milieu, en régime de diffusion simple (KMS =0), les éléments de K ont une cohérence le long de leurs anti-diagonales. Au contraire, quand KSS =0 et que la diffusion multiple domine, cette cohérence longue portée n’existe plus. C'est sur ces caractéristiques que repose la séparation des diffusions simple et multiple. Brièvement, le procédé se décompose en trois étapes : la matrice totale K=KSS+KMS est tournée d'un angle de 45° pour former une nouvelle matrice A dont les colonnes correspondent aux anti-diagonales de K. A est projetée sur l’espace propre de la diffusion simple qui traduit l’existence de la cohérence évoquée précédemment. La version "filtrée" de la matrice A est ensuite retournée de -45° pour donner une matrice KF, la matrice de réponse du milieu filtrée de sa composante de diffusion multiple. Pour plus de détails, le lecteur pourra consulter [8, 15]. Idéalement, la matrice résultant de ce procédé coïncide avec la matrice de diffusion simple : KF ≈ KSS.
Critère de détection Dans le cas où le milieu inspecté ne contient qu’un seul défaut, la variable d’intérêt est la
plus grande valeur singulière 1 issue de la SVD. Toutefois, même lorsque le milieu ne présente pas de défaut, il sera toujours possible de réaliser une SVD et d’obtenir des valeurs singulières non nulles. En particulier, dans le cas d’un milieu diffusant, même après filtrage, 1 peut être vue comme une variable aléatoire dont la valeur ne va, idéalement, dépasser un
certain seuil qu’en présence de défaut. Il est donc nécessaire, pour associer 1 à la cible (et non au bruit de structure), de définir un critère de détection adapté [8, 9, 15]. Pour
déterminer un critère de détection, la fonction de répartition F1 de la variable aléatoire 1 doit être connue. Elle est déterminée par l'inspection d'une zone du milieu ne contenant aucun

4
défaut. En construisant l'histogramme cumulé des premières valeurs singulières, on obtient un estimateur de la fonction de répartition F1. Une fois que F1 est connue, l’opérateur choisit une probabilité de fausse alarme (PFA) qu’il juge acceptable (1% par exemple) et en déduit
le seuil correspondant, tel que F1()=1-PFA (Figure 1). Lors de l’inspection de la zone contenant potentiellement des défauts, si pour un certain temps T et une certaine fréquence
f, une valeur de 1 supérieure à est observée, elle sera associée à la présence d’un défaut. La méthode DORT est alors appliquée : le vecteur singulier correspondant à 1 est repropagé, comme expliqué précédemment. Finalement, l’image à l’instant T sera constituée de la somme des images sur toutes les fréquences pour lesquelles le seuil a été dépassé : 荊1(劇) = �1(劇,血) �1 劇,血 × �∗(劇,血) 血 ,�1(劇,血)>糠(劇,血) (3)
Le critère de détection induit donc une sélection de fréquences lors de la reconstruction de l’image DORT.
Figure 1 : fonction de répartition et seuil
Afin de déterminer l’apport de la technique MSF-DORT, cette dernière a été appliquée à la détection de défauts volumiques présents dans un bloc en Inconel600® (alliage à base nickel) et comparée avec la méthode de focalisation en tout point (FTP) considérée comme la méthode de référence dans cette étude.
MONTAGE EXPERIMENTAL
Maquettes L’étude expérimentale a été réalisée sur une maquette (notée B4) en Inconel 600® prélevée dans une barre forgée de 135 mm de diamètre. L’Inconel 600® est un alliage à base nickel couramment utilisé dans le secteur nucléaire. Le choix de ce matériau se justifie par le fait qu’il présente une structure isotrope en termes de propriétés élastiques. Il est possible de faire évoluer la microstructure d’un acier polycristallin à l’aide d’un traitement thermique, afin d’augmenter la taille des grains. Dans cette étude, la maquette a été placée dans un four à haute température (1200°C) durant 360 minutes. Après le traitement thermique, une section transverse a été prélevée de façon à réaliser des

5
micrographies permettant de visualiser sa microstructure. Elles ont révélé que le diamètre moyen des grains était de 750 µm, il est ainsi possible de calculer le rapport entre la longueur d’onde de contrôle et le diamètre moyen des grains qui est de 1,6 pour un capteur de fréquence centrale 5 MHz. De plus, quatre trous cylindriques de 2 mm de diamètre, appelés « trous génératrices », ont été usinés à différentes profondeurs de façon à être situés à des profondeurs allant de 10 à 70 mm à partir d’une face, et de 20 à 80 mm par la face opposée, par pas de 20 mm.
Acquisitions et post-traitements de la matrice K La matrice des réponses impulsionnelles du milieu H a été obtenue en utilisant la méthode FMC avec une barrette de 64 éléments de dimensions 0.5x15mm² et de fréquence centrale 5MHz. Pour chaque défaut, les acquisitions ont été réalisées sur 11 positions décorrélées spatialement le long de la génératrice. De plus, comme illustré sur la figure 2, la barrette est positionnée à l’aplomb de chaque défaut (l’élément central est à la verticale du trou génératrice).
Figure 2 : Schéma de l’acquisition expérimentale.
Après obtention de la matrice K par une méthode fréquentielle haute résolution, il est possible d’appliquer différents post-traitements afin de créer des images synthétiques de la zone inspectée. Dans ce travail, plusieurs techniques ont été utilisées. La première, qui servira de référence, est la focalisation en tout point (FTP). La méthode FTP consiste à sommer les signaux provenant de chaque élément Hij(t) de façon à construire une focalisation synthétique en chaque point de l’image [16]. Dans ce cas, l’intensité en un point (x,z) de l’image s’écrit : 荊(�, �) = 茎件倹 � = �件 − � 2 + �2 + �倹 − � 2 + �2� 件,倹 (4)
Avec respectivement xi et xj les coordonnées de l’émetteur i et du récepteur j, et c la vitesse des ondes dans le milieu de propagation. Cela revient à faire comme si l’opérateur avait focalisé le faisceau point par point en émission et en réception. Ensuite, une fois notre méthode de référence établie, plusieurs post-traitements reposant sur les notions détaillées précédemment ont été appliqués. Dans le premier cas, la méthode DORT sans filtrage a été utilisée. C’est-à-dire que l’image reconstruite est telle que : 荊(劇,血) = �1(劇,血) �1 劇,血 × �∗(劇,血) 血 (5)
6
Dans un second temps, on applique à la méthode DORT, le critère de détection défini précédemment. En conséquence, l’image n’est plus créée à partir de la contribution de toutes les fréquences mais seulement de celles pour lesquelles 1 est au dessus du seuil, voir équation (3). Enfin, la méthode DORT avec le critère de détection est appliquée après filtrage de la contribution de diffusion multiple, ce qui signifie que l’image est obtenue à partir de l’équation : 荊1(劇) = �1�(劇,血) �1� 劇,血 × �∗(劇,血) 血 ,�1�(劇,血)>糠(劇,血) (6)
Avec �1� et �1� respectivement la première valeur singulière de la matrice KF et le vecteur singulier associé. La différence avec la méthode DORT classique est que les valeurs singulières et vecteurs singuliers sont calculés après filtrage. C’est ce post-traitement complet qui constitue la méthode MSF-DORT (pour Multiple Scattering Filtered DORT).
RESULTATS
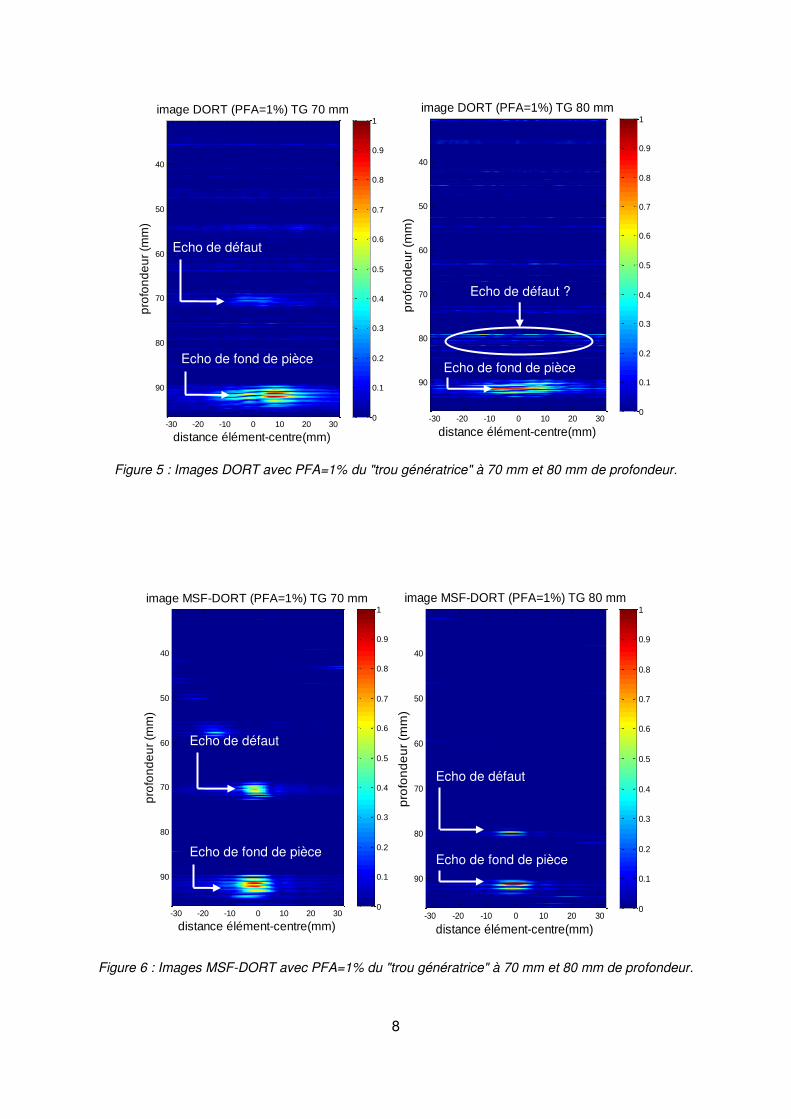
Imagerie Seuls les défauts situés aux profondeurs 70 et 80 mm de la maquette B4 ont été étudiés. En effet, ces profondeurs représentent des conditions très défavorables pour la détection de défauts et vont permettre de démontrer les performances de la nouvelle méthode développée. Des exemples de résultats obtenus pour chacun des post-traitements sont donnés sur les images ci-dessous (Figures 3 à 6). Pour la FTP (Figure 3), les images obtenues sont fortement bruitées, l'écho de défaut n'est pas visible ni sur les acquisitions à 70 mm ni sur les acquisitions à 80 mm. Parfois, même l’écho de fond de pièce n’est pas discernable. Pour la méthode DORT seule (Figure 4), une amélioration peut déjà être constatée par rapport aux images issues de la FTP. En effet, malgré un bruit encore très présent, les échos du défaut à 70 mm sont visibles sur plus de la moitié des acquisitions. Cependant, les échos de TG à 80 mm ne sont toujours pas discernables. La diminution du bruit permet cependant de faire apparaître l'écho de fond de pièce. La figure 5, quant à elle, montre que l'utilisation du seuillage (PFA à 1%) combiné avec la méthode DORT non filtrée permet une réduction du bruit environnant l'écho de défaut mais ne suffit pas à améliorer les performances de la méthode. Enfin, les images issues de l’application de la méthode MSF-DORT (Figure 6) mettent en évidence l'écho de défaut sur toutes les réalisations à 70 mm et sur près de la moitié des positions qui concerne le défaut à 80 mm ce qui est un réel gain de performance.

7
Figure 3 : Images FTP du "trou génératrice" à 70 mm et 80 mm de profondeur.
Figure 4 : Images DORT du "trou génératrice" à 70 mm et 80 mm de profondeur.
image DORT "classique" TG 80 mm
distance élément-centre(mm)
prof
onde
ur (
mm
)
-30 -20 -10 0 10 20 30
40
50
60
70
80
900.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1image DORT "classique" TG 70 mm
distance élément-centre(mm)
prof
onde
ur (m
m)
-30 -20 -10 0 10 20 30
40
50
60
70
80
90 0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
distance élément-centre (mm)
prof
onde
ur (m
m)
image FTP TG 80 mm
-10 0 10
40
50
60
70
80
90
100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
distance élément-centre (mm)
prof
onde
ur (m
m)
image FTP TG 70 mm
-10 0 10
40
50
60
70
80
90
100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Echo de fond de pièce
Echo de défaut ?
Echo de défaut
Echo de fond de pièce
Echo de fond de pièce
Echo de défaut ?
Echo de fond de pièce
8
Figure 5 : Images DORT avec PFA=1% du "trou génératrice" à 70 mm et 80 mm de profondeur.
Figure 6 : Images MSF-DORT avec PFA=1% du "trou génératrice" à 70 mm et 80 mm de profondeur.
image DORT (PFA=1%) TG 70 mm
distance élément-centre(mm)
prof
onde
ur (m
m)
-30 -20 -10 0 10 20 30
40
50
60
70
80
90
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1image DORT (PFA=1%) TG 80 mm
distance élément-centre(mm)
pro
fon
de
ur
(mm
)
-30 -20 -10 0 10 20 30
40
50
60
70
80
90
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
image MSF-DORT (PFA=1%) TG 70 mm
distance élément-centre(mm)
prof
onde
ur (m
m)
-30 -20 -10 0 10 20 30
40
50
60
70
80
90
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1image MSF-DORT (PFA=1%) TG 80 mm
distance élément-centre(mm)
pro
fon
de
ur
(mm
)
-30 -20 -10 0 10 20 30
40
50
60
70
80
90
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Echo de défaut
Echo de fond de pièce
Echo de défaut
Echo de fond de pièce
Echo de défaut
Echo de fond de pièce Echo de fond de pièce
Echo de défaut ?
9
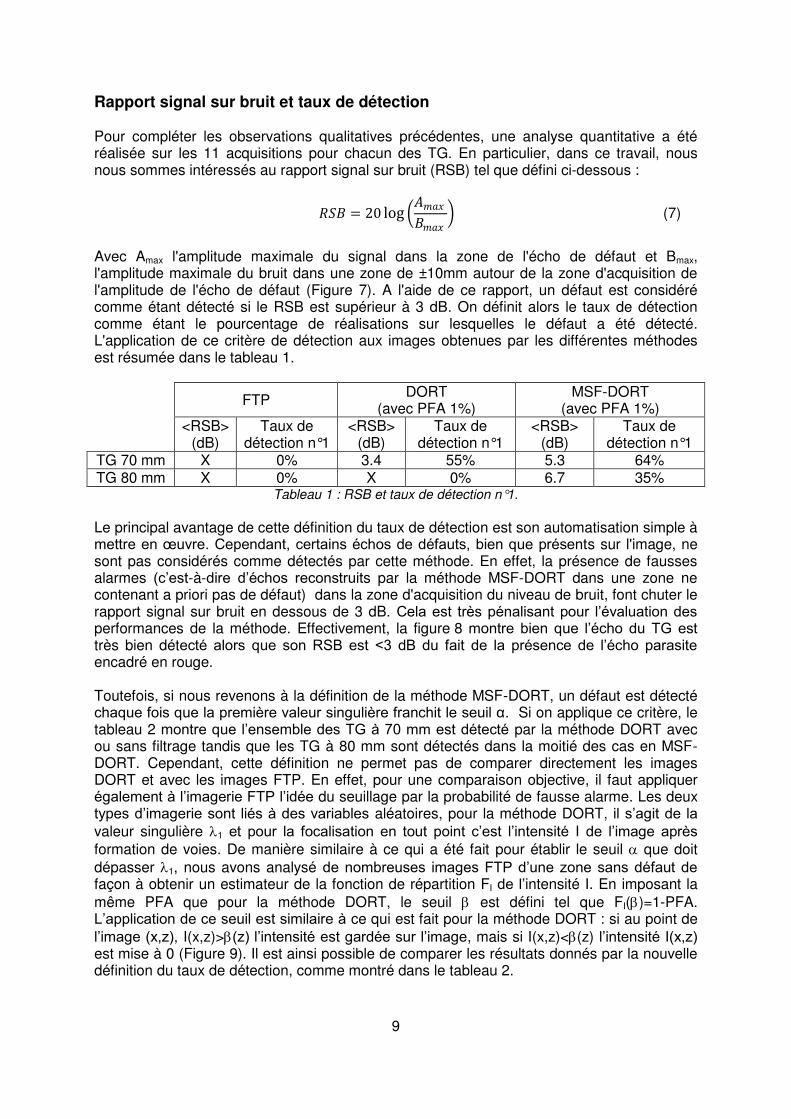
Rapport signal sur bruit et taux de détection Pour compléter les observations qualitatives précédentes, une analyse quantitative a été réalisée sur les 11 acquisitions pour chacun des TG. En particulier, dans ce travail, nous nous sommes intéressés au rapport signal sur bruit (RSB) tel que défini ci-dessous : 迎鯨稽 = 20 log 畦���稽��� (7)
Avec Amax l'amplitude maximale du signal dans la zone de l'écho de défaut et Bmax, l'amplitude maximale du bruit dans une zone de ±10mm autour de la zone d'acquisition de l'amplitude de l'écho de défaut (Figure 7). A l'aide de ce rapport, un défaut est considéré comme étant détecté si le RSB est supérieur à 3 dB. On définit alors le taux de détection comme étant le pourcentage de réalisations sur lesquelles le défaut a été détecté. L'application de ce critère de détection aux images obtenues par les différentes méthodes est résumée dans le tableau 1.
FTP DORT
(avec PFA 1%) MSF-DORT
(avec PFA 1%)
<RSB>
(dB) Taux de
détection n°1 <RSB>
(dB) Taux de
détection n°1 <RSB>
(dB) Taux de
détection n°1 TG 70 mm X 0% 3.4 55% 5.3 64% TG 80 mm X 0% X 0% 6.7 35%
Tableau 1 : RSB et taux de détection n°1.
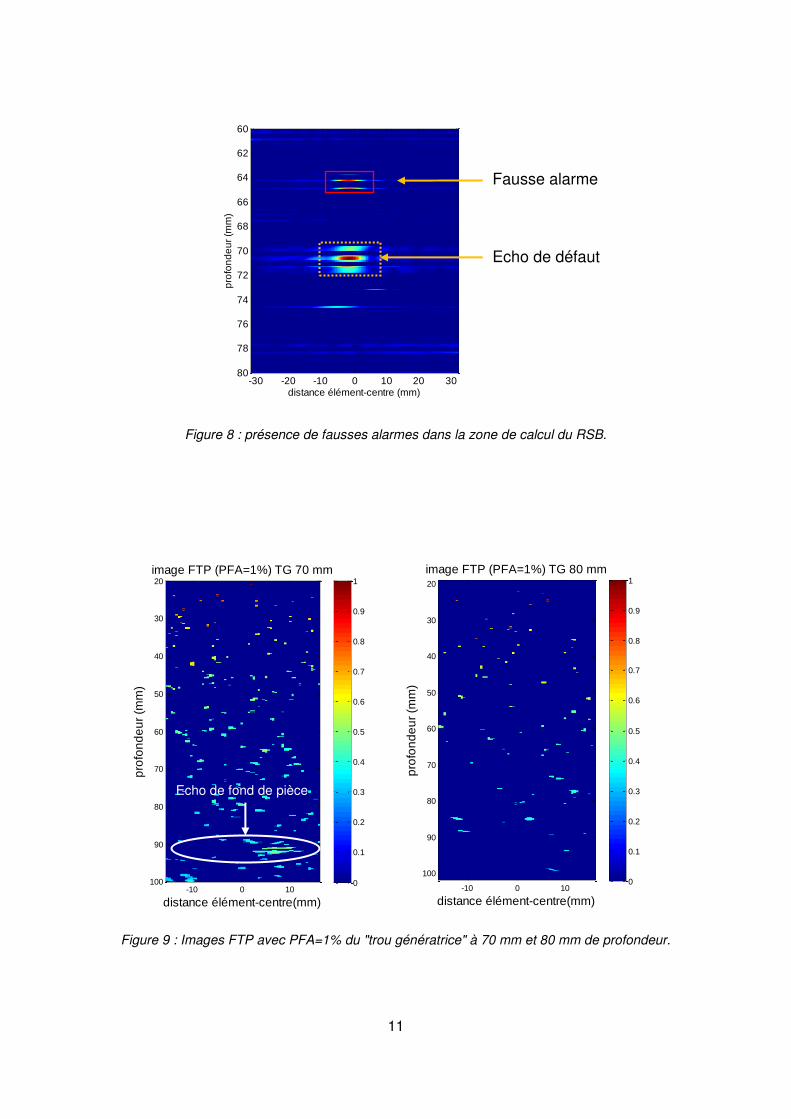
Le principal avantage de cette définition du taux de détection est son automatisation simple à mettre en œuvre. Cependant, certains échos de défauts, bien que présents sur l'image, ne sont pas considérés comme détectés par cette méthode. En effet, la présence de fausses alarmes (c’est-à-dire d’échos reconstruits par la méthode MSF-DORT dans une zone ne contenant a priori pas de défaut) dans la zone d'acquisition du niveau de bruit, font chuter le rapport signal sur bruit en dessous de 3 dB. Cela est très pénalisant pour l’évaluation des performances de la méthode. Effectivement, la figure 8 montre bien que l’écho du TG est très bien détecté alors que son RSB est <3 dB du fait de la présence de l’écho parasite encadré en rouge. Toutefois, si nous revenons à la définition de la méthode MSF-DORT, un défaut est détecté chaque fois que la première valeur singulière franchit le seuil α. Si on applique ce critère, le tableau 2 montre que l’ensemble des TG à 70 mm est détecté par la méthode DORT avec ou sans filtrage tandis que les TG à 80 mm sont détectés dans la moitié des cas en MSF-DORT. Cependant, cette définition ne permet pas de comparer directement les images DORT et avec les images FTP. En effet, pour une comparaison objective, il faut appliquer également à l’imagerie FTP l’idée du seuillage par la probabilité de fausse alarme. Les deux types d’imagerie sont liés à des variables aléatoires, pour la méthode DORT, il s’agit de la valeur singulière 1 et pour la focalisation en tout point c’est l’intensité I de l’image après formation de voies. De manière similaire à ce qui a été fait pour établir le seuil que doit
dépasser 1, nous avons analysé de nombreuses images FTP d’une zone sans défaut de façon à obtenir un estimateur de la fonction de répartition FI de l’intensité I. En imposant la
même PFA que pour la méthode DORT, le seuil est défini tel que FI()=1-PFA. L’application de ce seuil est similaire à ce qui est fait pour la méthode DORT : si au point de
l’image (x,z), I(x,z)>(z) l’intensité est gardée sur l’image, mais si I(x,z)<(z) l’intensité I(x,z) est mise à 0 (Figure 9). Il est ainsi possible de comparer les résultats donnés par la nouvelle définition du taux de détection, comme montré dans le tableau 2.

10
FTP
(avec PFA 1%) DORT
(avec PFA 1%) MSF-DORT
(avec PFA 1%)
Taux de détection n°2 Taux de détection n°2 Taux de détection n°2
TG 70 mm 0% 100% 100%
TG 80 mm 0% 9% 45.5% Tableau 2 : Taux de détection n°2.
Cette nouvelle façon de définir le taux de détection permet de mieux prendre en compte la spécificité de la technique MSF-DORT, tout en offrant une comparaison objective, fondée sur une PFA unique, avec d’autres méthodes d’imagerie. Toutefois, elle devrait être assortie d’un critère de « forme » de l’écho reconstruit. En effet, il se peut que ponctuellement, pour une fréquence donnée, la première valeur singulière dépasse le seuil hors de la présence d’un défaut. Alors, un écho sera reconstruit par la méthode DORT. Toutefois, celui-ci n’aura pas la même forme que celui d’un écho de TG et en particulier, ne présentera pas une étendue spatiale suffisante pour être considéré comme significatif (Figure 8). Ainsi, pour avoir un sens, il est nécessaire d’assujettir le dépassement de seuil à une notion de « signature » du défaut recherché. De plus, l’apparition de fausses alarmes peut être une limitation si elle conduit à diagnostiquer la présence d’un défaut dans une zone saine. Il s’agit donc de déterminer l’origine physique des fausses alarmes pour limiter leur apparition et/ou permettre leur identification.
Figure 7 : zone d'acquisition des amplitudes maximum de bruit et de défaut.
distance élément-centre (mm)
prof
onde
ur (m
m)
-30 -20 -10 0 10 20 30
60
65
70
75
80
Zone d’acquisition de l’amplitude de l’écho de défaut
Zone d’acquisition du niveau de bruit
11
Figure 8 : présence de fausses alarmes dans la zone de calcul du RSB.
Figure 9 : Images FTP avec PFA=1% du "trou génératrice" à 70 mm et 80 mm de profondeur.
distance élément-centre (mm)
prof
onde
ur (m
m)
-30 -20 -10 0 10 20 30
60
62
64
66
68
70
72
74
76
78
80
Echo de défaut
Fausse alarme
distance élément-centre(mm)
prof
onde
ur (m
m)
image FTP (PFA=1%) TG 80 mm
-10 0 10
20
30
40
50
60
70
80
90
1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1image FTP (PFA=1%) TG 70 mm
distance élément-centre(mm)
prof
onde
ur (m
m)
-10 0 10
20
30
40
50
60
70
80
90
100 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Echo de fond de pièce

12
CONCLUSIONS ET PERSPECTIVES
Dans ce travail, un bloc d’Inconel600® dans lequel les phénomènes de diffusion multiple des ultrasons sont fortement présents a été étudié, autour de 5 MHz, dans un régime où la longueur d’onde est comparable à la taille moyenne des grains. Les techniques d’imagerie classique, comme la focalisation en tout point, se révèlent alors inefficaces pour détecter un défaut de type « trou génératrice » de 2 mm de diamètre à des profondeurs supérieure à 70 mm. La combinaison du filtrage de la diffusion multiple et de la méthode de détection de cible a eu pour effet de réduire considérablement le bruit de structure et d’augmenter de façon importante la détection de défaut. Ces résultats se révèlent très encourageants de par l’augmentation des capacités de détection de défauts enfouis dans une structure très diffusante en comparaison des performances de la méthode de focalisation en tout point. Cependant l’apparition de fausses alarmes reste un problème à étudier. Dans la poursuite de ce travail, il s’agira d’étudier la possibilité d’étendre la méthode de détection à d’autres types de défauts, notamment aux défauts plans de type fissure, et à d’autres matériaux (par exemple aux aciers austéno-ferritiques moulés par centrifugation). De plus, cette étude ne traite que de l’aspect détection de défaut. Il s’agira à l’avenir de développer les capacités de caractérisation (i.e. dimensionnement) des défauts inspectés.
REFERENCES
[1] J. A. Turner and R. L. Weaver, "Time dependence of multiply scattered diffuse ultrasound in polycrystalline media," The Journal of the Acoustical Society of America, vol. 97, 1995, pp. 2639-2644.
[2] J. A. Turner and R. L. Weaver, "Radiative transfer and multiple scattering of diffuse ultrasound in polycrystalline media," The Journal of the Acoustical Society of America, vol. 96, 1994, pp. 3675-3683.
[3] Y. Chen, et al., "Use of a Wavelet Analysis Technique for the Enhancement of Signal-to-noise Ratio in Ultrasonic NDE," Insight, vol. 38, 1996, pp. 800-803.
[4] J. Chen, et al., "Noise analysis of digital ultrasonic system and elimination of pulse noise," International journal of pressure vessels and piping, vol. 75, 1998, pp. 887-890.
[5] A. Abbate, et al., "Signal detection and noise suppression using a wavelet transform signal processor: application to ultrasonic flaw detection," Ultrasonics, Ferroelectrics and Frequency Control, vol. 44, 1997, pp. 14-26.
[6] L. Yue and Y. Chong-Fu, "Two signal processing techniques for the enhancement of the flaw-to-grain echo ratio," Ultrasonics, vol. 25, 1987, pp. 90-94.
[7] S. Shahjahan, et al., "Comparison between experimental and 2-D numerical studies of multiple scattering in Inconel600® by means of array probes," Ultrasonics, vol. 54, 2014, pp. 358-367.
[8] A. Aubry and A. Derode, "Random matrix theory applied to acoustic backscattering and imaging in complex media," Physical review letters, vol. 102, 2009, p. 084301.
[9] A. Aubry and A. Derode, "Detection and imaging in a random medium: A matrix method to overcome multiple scattering and aberration," Journal of Applied Physics, vol. 106, 2009, p. 044903.
[10] S. Shahjahan, F. Rupin, B. Chassignole, A. Derode, "Flaw detection on Inconel600 using separation of single and multiple scattering contributions," Acoustics, 2012, pp. 2645-2650.

13
[11] S. Shahjahan, "Improvement of flaw detection with ultrasonic array probes in multiple scattering polycrystalline materials by means of a random matrix approach : experimental and simulation studies," Paris Diderot (Paris 7), 2013.
[12] C. Prada, et al., "Time reversal techniques in ultrasonic nondestructive testing of scattering media," Inverse Problems, vol. 18, 2002, pp. 1761-1773.
[13] C. Prada, S. Mannevile, D. Spoliansky, M. Fink, "Decomposition of the time reversal operator: Detection and selective focusing on two scatterers," J. Acoust. Soc. , 1995, pp. 2067–2076.
[14] C. Prada, et al., "Flaw detection in solid with the DORT method," in Ultrasonics Symposium, Proceedings, 1997, pp. 679-683.
[15] A. Aubry and A. Derode, "Singular value distribution of the propagation matrix in random scattering media," Waves in Random and Complex Media, vol. 20, 2010, pp. 333-363.
[16] C. Holmes, et al., "Post-processing of the full matrix of ultrasonic transmit–receive array data for non-destructive evaluation," NDT & E International, vol. 38, 2005, pp. 701-711.


















