Alu design-project
38
ENEL 619.76 EMBEDDED SYSTEM FINAL PROJECT ARM ALU Group Members: Mohammad Ahmadi Michael Chen Yifeng Qiu Roghoyeh Salmeh 1
Transcript of Alu design-project

ENEL 619.76
EMBEDDED SYSTEM
FINAL PROJECT
ARM ALU
Group Members:
Mohammad Ahmadi
Michael Chen
Yifeng Qiu
Roghoyeh Salmeh
1

Contents
1. Arithmetic Logic Unit (ALU) 3
2. Project Specification 4
3. Logic Units 7
4. Carry Look Ahead Adder 11
5. Multiplier 16
6.Verilog Program 28
7. Simulation Results 30
2

1. Arithmetic Logic Unit (ALU)
An arithmetic-logic unit (ALU) is the part of a computer processor (CPU) that carries out
arithmetic and logic operations on the operands in computer instruction words. ALU
performs operations such as addition, subtraction and multiplication of integers and bit-
wise AND, OR, NOT, XOR and other Boolean operations. The CPU's instruction decode
logic determines which particular operation the ALU should perform, the source of the
operands and the destination of the result.
The width in bits of the words which the ALU handles is usually the same as that quoted
for the processor as a whole whereas its external buses may be narrower. Floating-point
operations are usually done by a separate "floating-point unit". Some processors use the
ALU for address calculations (e.g. incrementing the program counter), others have
separate logic for this.
In some processors, the ALU is divided into two units, an arithmetic unit (AU) and a
logic unit (LU). Some processors contain more than one AU - for example, one for fixed-
point operations and another for floating-point operations. (In personal computers
floating point operations are sometimes done by a floating point unit on a separate chip
called a numeric coprocessor.)
Typically, the ALU has direct input and output access to the processor controller, main
memory (random access memory or RAM in a personal computer), and input/output
devices. Inputs and outputs flow along an electronic path that is called a bus. The input
consists of an instruction word (sometimes called a machine instruction word) that
contains an operation code (sometimes called an "op code"), one or more operands, and
sometimes a format code. The operation code tells the ALU what operation to perform
and the operands are used in the operation. (For example, two operands might be added
together or compared logically.) The format may be combined with the op code and tells,
for example, whether this is a fixed-point or a floating-point instruction. The output
consists of a result that is placed in a storage register and settings that indicate whether
the operation was performed successfully. (If it isn't, some sort of status will be stored in
a permanent place that is sometimes called the machine status word.)
3

In general, the ALU includes storage places for input operands, operands that are being
added, the accumulated result (stored in an accumulator), and shifted results. The flow of
bits and the operations performed on them in the subunits of the ALU is controlled by
gated circuits. The gates in these circuits are controlled by a sequence logic unit that uses
a particular algorithm or sequence for each operation code. In the arithmetic unit,
multiplication and division are done by a series of adding or subtracting and shifting
operations. There are several ways to represent negative numbers. In the logic unit, one
of 16 possible logic operations can be performed - such as comparing two operands and
identifying where bits don't match.
The design of the ALU is obviously a critical part of the processor and new approaches to
speeding up instruction handling are continually being developed.
2. Project Specification
The ALU is designed on a 5-stage pipeline operation. One instruction cycle consists of 5
system clocks. The first system clock is for Fetch Instruction, the second for Instruction
Decoding, the third for Read Operands, the fourth for Execution and the fifth for Write
Back. Because there is 5-stage pipeline operation existing, thus for each system clock, it
is necessary to feed the opcode and data/address (if available) into the ALU module.
Thus, for each Write Back cycle, if there are any output data and address, they will be fed
back onto the output bus. A detailed specification of the ALU is presented at the
following section:
2.1. Specification of the ALU
1. 16-bit register based RISC ALU architecture with 8 general registers
2. 5-stage pipeline operation
3. Instructions including signed and unsigned data operation
4. Internal accumulators
5. Condition registers (ZF, CF, SF, OF)
6. Instruction with 1 or 2 operands with internal stack
7. Carry look-ahead algorithm to implement ADD operation
4

8. Wallace Tree algorithm to implement MUL operation
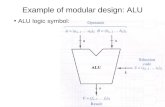
2.2. Set of the functions
The input signals for ALU module are rst, clk, opcode and data.
rst: reset signal
clk: system clocks
opcode: the instruction operational code, [13:6] for instruction code, [5:3] for register 1
address, [2:0] for register 2 address
data: instruction required data or addresses for ALU module
The output signals for ALU module are output_address, output_data and
pc_counter_address.
output_address: when meeting the external memory storage instructions, the
output_address will output the external memory address
output_data: when meeting the external memory storage instructions, the output_data will
output the data to be stored in the external memory
pc_counter_address: when meeting the jumping instructions, the pc_counter_address will
output the jumping address to inform the external PC
The internal registers are explained as following.
system_stack: ALU internal system stack, which is for PUSH and POP operation
ZF,CF,SF,OF: four flags for arithmetic instruction result
accum: ALU accumulator A
bccum: ALU accumulator B
accum_for_out: to solve the pipeline hazard (read-after-write), this internal register is
introduced
General_Register: general purpose registers (AX, BX, CX, DX, EX, FX, GX, HX)
temp_opcode: internal register to temporarily store the instruction code
temp_register1_address: internal register to temporarily store the register 1 address
temp_register2_address: internal register to temporarily store the register 2 address
temp_data: internal register to temporarily store the data/address
temp_operand1_top: internal register to temporarily store the top bit (D16) for arithmetic
5

operation result
operand_number: record the operand number of instructions
state_number: the status of system clocks
stack_point: internal stack point
jumping_tag: indicate whether the program will need execute jumping operation
first_round: there is 5-stage pipeline operation, and at the beginning of the pipeline
operation, the first round flag register will indicate the beginning status of
the system clocks for operation
HLT_FLAG: if there is a HLT instruction, the HLT FLAG will be set to 1
Carry, G, P: internal registers for carry look-ahead ADD algorithm
i, td, shift: internal registers for control flow and arithmetic operations
The ALU system operations will begin at each positive edge of the system clock. When
there is a rst signal coming, all the internal signals will be cleared and output signals will
be set to High Z status.
The overall structure of the program:
always @(posedge rst or posedge clk)
{
if (rst is active) initialize the system internal registers and output buses
else
{
if (there is the first round pipeline operation) set the status number register
else status number register=(status + 1) mod 5
implement the first system cycle operation (Fetch Instruction)
implement the second system cycle operation (determine the operand number)
implement the third system cycle operation (Read Operands)
implement the fourth system cycle operation (Execution)
implement the fifth system cycle operation (Write Back)
}
}
3. Logic Units
3.1. AND
6

(1) Instruction Format: AND Oprand1 Oprand2
(2) Function: Oprand1 and Oprand2 are two 16_bits register inputs. This operator
performs the bitwise_AND operation, and put the result in Oprand1.
The truth table defines the behavior of each bit operation shown in figure 1-(a). The
circuit symbol is shown in figure 1-(b).
(3) Implementing AND with Verilog HDL:
module ALU_AND(Clk,Operand0,Operand1);
input [15:0] Operand0;
input [15:0] Operand1;
input Clk;
reg[15:0] Operand0;
always@(posedge Clk) Operand0 = Operand0 & Operand1;
endmodule
3.2. OR:(1) Instruction Format: OR Oprand1 Oprand2
(2) Function: Oprand1 and Oprand2 are two 16_bits register inputs. This operator
performs the bitwise_OR operation, and put the result in Oprand1.
The truth table defines the behavior of each bit operation shown in figure 2-(a). The
circuit symbol is shown in figure 2-(b).
(3) Implementing OR with Verilog HDL:
module ALU_OR(Clk, Operand0, Operand1);input [15:0] Operand0;input [15:0] Operand1;input Clk;
7

reg[15:0] Operand0;always@(posedge Clk) Operand0 = Operand0 | Operand1;
endmodule
3.3. XOR:(1) Instruction Format: XOR Oprand1 Oprand2
(2) Function: Oprand1 and Oprand2 are two 16_bits register inputs. This operator
performs the bitwise_XOR operation, and put the result in Oprand1.
The truth table defines the behavior of each bit operation shown in figure 3-(a). The
circuit symbol is shown in figure 3-(b).
(3) Implementing XOR with Verilog HDL:
module ALU_XOR(Clk, Operand0, Operand1);
input [15:0] Operand0;
input [15:0] Operand1;
input Clk;
8

reg[15:0] Operand0;
always@(posedge Clk) Operand0 = Operand0 ^ Operand1;
endmodule
3.4. NOT:
(1) Instruction Format: NOT Oprand1
(2) Function: Oprand1 is a 16_bits register input. This operator performs the
bitwise_NOT operation on Oprand1.
The truth table defines the behavior of each bit operation shown in figure 4-(a). The
circuit symbol is shown in figure 4-(b).
(3) Implementing NOT with Verilog HDL:
module ALU_NOT(Clk, Operand0);
input [15:0] Operand0;
input Clk;
reg[15:0] Operand0;
always@(posedge Clk) Operand0 = ~Operand0;
Endmodule
3.5. NEG:
(1) Three different ways of representing signed numbers:a) Signed magnitude representation: To negate a number by adding an extra sign
bit to the front of our numbers. By convention:
– A 0 sign bit represents a positive number.
– A 1 sign bit represents a negative number.
9

For example: 01101B = +13 D(a positive number in 5-bit signed magnitude)
1 1101B = -13 D(a negative number in 5-bit signed magnitude)
b) One’s complement representation: To negate a number by complementing each bit of the number.For example: 01101 B= +13D (a positive number in 5-bit one’s complement)
1 0010B= -13D (a negative number in 5-bit one’s complement)
c) Two’s complement representation: To negate a number, complement each bit (just as for ones’ complement) and then add 1.For example: 01101 = +1310 (a positive number in 5-bit two’s complement)
1 0011 = -1310 (a negative number in 5-bit two’s complement)
In this project, we use the third, 2’s complement representation, to represent
signed numbers.
(2) Instruction Format: NEG Oprand1
(3) Function: Oprand1 is a 16_bits register inputs. This operator performs negating
Oprand1, and put the result in Oprand1.
(4) Implementing NEG with Verilog HDL:
module ALU_NEG(Clk, Operand0);
input [15:0] Operand0;
input Clk;
reg [15:0] Operand0;
always@(posedge Clk) Operand0 = ~Operand0 + 1;
endmodule
4. Carry Look Ahead Adder
The sum of two single-bit binary numbers can be formed using the logic gates. If both
bits are zero the sum is zero; the sum of a one and a zero is one, but the sum of two ones
is two, which is represented in binary notation by the two bits '10'. An adder for two
single-bit inputs must therefore have two output bits: a SUM bit with the same weight as
the input bits and a CARRY bit which has twice that weight. An adder for N-bits binary
10

numbers can be constructed from single-bit adders, but all bits except the first may have
to accept a carry input from the next lower stage. Each bit of the adder produces a sum
and a carry-out from the inputs and the carry-in.
In the 4-bit ripple-carry adder, called so because the result of an addition of two
bits depends on the carry generated by the addition of the previous two bits. Thus, the
Sum of the most significant bit is only available after the carry signal has rippled through
the adder from the least significant stage to the most significant stage. This can be easily
understood if one considers the addition of the two 4-bit words: 1 1 1 1 2 + 0 0 0 1 2, as
shown in Fig. 5.
Figure 5. Addition of two 4-bit numbers illustrating the generation of the carry-out bit.
In this case, the addition of (1+1 = 10)2 in the least significant stage causes a carry bit to
be generated. This carry bit will consequently generate another carry bit in the next stage,
and so on, until the final carry-out bit appears at the output. This requires the signal to
travel (ripple) through all the stages of the adder as shown in Fig. 5. As a result, the final
Sum and Carry bits will be valid after a considerable delay. For the schematic of Fig. 5,
the Sum of the most significant stage will be valid after 2(N-1) + 1 gate delays, in which
N is the number of bits. The carry-out bit will be valid after 2N gate delays. This delay
may be in addition to any delays associated with interconnections. It should be mentioned
that in case one implements the circuit in a FPGA, the delays may be different from the
above expression depending on how the logic has been placed in the look up tables and
how it has been divided among different CLBs.
The disadvantage of the ripple-carry adder is that it can get very slow when one needs to
add many bits. In Fig. 6. the delay of the carry bit for a 4 – bit Ripple carry adder is
11

shown. For instance, for a 32-bit adder, the delay would be about 66 ns if one assumes a
gate delay of 1 ns. That would imply that the maximum frequency one can operate this
adder would be only 15 MHz! For fast applications, a better design is required. The
carry-look-ahead adder solves this problem by calculating the carry signals in advance,
based on the input signals. It is based on the fact that a carry signal will be generated in
two cases: (1) when both bits Ai and Bi are 1, or (2) when one of the two bits is 1 and the
carry-in (carry of the previous stage) is 1.
Figure 6. 4 - bits Ripple carry adder, showing the delay of the carry bit.
Thus, one can write,
COUT = Ci+1 = Ai . Bi + (Ai Å Bi).Ci. (1)
The “ Å “ stands for exclusive OR or XOR. One can write this expression also, as
Ci+1 = Gi + Pi . Ci (2)
12

in which,
Gi = Ai . Bi (3)
Pi = (Ai Å Bi) (4)
are called the Generate and Propagate term, respectively.
From (2) – (4) it is clear that both the Propagate and Generate terms only depend on the
input bits and thus will be valid after one gate delay. If we use the above expression to
calculate the carry signals, we do not need to wait for the carry to ripple through all the
previous stages to find its proper value. Now if we apply this to a 4-bit adder.
C1 = G0 + P0.C0 (5) C2 = G1 + P1.C1 = G1 + P1.G0 + P1.P0.C0 (6) C3 = G2 + P2.G1 + P2.P1.G0 + P2.P1.P0.C0 (7) C4 = G3 + P3.G2 + P3.P2.G1 + P3P2.P1.G0 + P3P2.P1.P0.C0 (8)
Now it is clear that the carry-out bit, Ci+1, of the last stage will be available after three
delays (one delay to calculate the Propagate signal and two delays as a result of the AND
and OR gate). The Sum signal can be calculated as follows,
Si = Ai Å Bi Å Ci = Pi Å Ci (9)
The Sum bit will thus be available after one additional gate delay. The advantage is that
these delays will be the same independent of the number of bits one needs to add, in
contrast to the ripple counter.
The carry-lookahead adder can be broken up in two modules: (A) the Partial Full Adder,
PFA, which generates Si, Pi and Gi as defined by equations 3, 4 and 9 above; and (B) the
Carry Look-ahead Logic, which generates the carry-out bits according to equations 5 to
8. The 4-bit adder can then be built by using 4 PFAs and the Carry Look-ahead logic
block as shown in Fig. 7.
The disadvantage of the carry-lookahead adder is that the carry logic is getting quite
13

complicated for more than 4 bits. For that reason, carry-look-ahead adders are usually
implemented as 4-bit modules and are used in a hierarchical structure to realize adders
that have multiples of 4 bits. Fig. 8 shows the block diagram for a 16-bit CLA adder. The
circuit makes use of the same CLA Logic block as the one used in the 4-bit adder. Notice
that each 4-bit adder provides a group Propagate and Generate Signal, which is used by
the CLA Logic block.
Figure 7. The block diagram of a 4-bit Carry Look Ahead ADDER.
The group Propagate PG of a 4-bit adder will have the following expressions,
PG = P3.P2.P1.P0; (10)
GG = G3 + P3G2 + P3.P2.G1. + P3.P2.P1.G0 (11)
The group Propagate PG and Generate GG will be available after 2 and 3 gate delays,
respectively (one or two additional delays than the Pi and Gi signals, respectively).
14

Figure 8. The block diagram of a 16-bit CLA Adder
5. Wallace Tree Multiplier
At the most basic level, digital multiplication can be seen as a series of bit shifts and bit
additions, where two numbers, the multiplier and the multiplicand are combined into the
final result. Consider the multiplication of two numbers: the multiplier P, and
multiplicand C, where P is an n-bit number with bit representation {pn-1,pn-2,...,p0}, the
most significant bit being pn-1 and the least significant bit being p0; C has a similar bit
representation {cn-1,cn-2,...,c0}. For unsigned multiplication, up to n shifted copies of the
multiplicand are added to form the result. The entire procedure is divided into three steps:
partial product (PP) generation, partial product reduction, and final addition. This is
illustrated conceptually in Figure 9. In order to find a convenient and fast structure for
our multiplier, we should consider various multiplier structures.
15
, 01/03/-1,
<!--[if gte vml 1]><v:shape id="_x0000_i1028" type="#_x0000_t75" alt="" style='width:369pt;height:2in'> <v:imagedata src="./project3_files/image004.gif" o:href="http://www.seas.upenn.edu:8080/~ee201/lab/CarryLookAhead/lab5_fig6.gif"/></v:shape><![endif]-->
, 01/03/-1,
<!--[endif]-->
, 01/03/-1,
<!--[if !vml]-->

Figure 9. Digital multiplication flow.
5.1. Partial Product GenerationThe initial step in digital multiplication is to generate n shifted copies of the multiplicand
which may then be added in the next stage. Whether a given shifted copy of the
multiplicand is added depends on the value of the multiplier bit corresponding to this
multiplicand copy. If the ith bit, (i =0 to n-1) of the multiplier is ‘1’, then the
multiplicand is added. If the bit is ‘0’, the multiplicand is not added.
The bit representation of this function can be implemented using a logical AND gate,
which performs AND(ci,pj), i = 0 to n-1, j = 0 to n-1. The resulting values are called
partial product bits or simply, partial products; if we line up these partial products by bit
position (bp = i + j), we arrive at a structure shown in Figure 10. In this design, the partial
product bits are arranged in columns, which are to be added together to form the final
value. The resulting trapezoidal structure is called a partial product array or simply PPA.
This step is called partial product array generation.
Various forms of partial product arrays exist, depending on the number representation.
For example, in the following section we describe a common variant called Booth
recoding, which allows a signed multi-bit partial product representation of the design.
16

Figure 10. Partial product generation for 6-bit by 6-bit multiplication.
There are several important points to notice about the partial product array. First, in the
most basic formulation (PPA bits generated via logical AND), all the bits are created in
parallel; that is, the static delay of each of the bits is equal. Second, the dimensions of the
array are functions of the size of the multiplier and multiplicand: the height of the array is
proportional to the size of the multiplier, and the width is proportional to the size of the
multiplicand.
Finally, all the bits in a particular column are to be added together, and some columns
have fewer bits than others. Specifically, low-order and high-order bit positions will
require fewer additions than the middle bit positions; slightly more additions will be
required at the high-order positions than at the low-order ones, as carries from low order
positions result in a larger number of bits to be added at the high order bit positions.
5.2. Partial Product ReductionThe heart of an efficient digital multiplier implementation is in the manner in which the
PPA bits are added. Were conventional carry adders used to implement these add
operations, the delay of all the adders would consume a large amount of time, as each
shifted version of the multiplicand would contribute a delay which is proportional to the
width of the multiplicand. Instead, the partial product is reduced using a technique called
carry-save addition. This procedure allows successive additions to be incorporated into
one global addition step.
17

Consider a numerical bit vector representation of the following form: (bn-1,bn-2,...,b1,b0),
bi = {0,1}. If we wish to add two bits from two bit vectors, say a0 and b0, from bit vectors
a and b, we can use the full adder (Figure 11a); it takes in three bits and produces a sum
bit, and a carry bit. When adding two vectors together, this block can be used to add two
bits at a given bit position with the carry-in from the previous bit position. Consider the
case where two bit vectors are to be added. At the lowest bit position, two bits are added,
and the carry is propagated to the next bit position. From then on the carry-in and the next
two bits at the higher bit position are combined, and a carry-out is generated. Using this
rippling technique, we see that adding two n-bit number takes O(n) sequential bit
additions, resulting in a delay of O(n).
If we have to add three bit vectors, A, B, and C, each of size n, we can use this method to
add first A and B, and then to add C to the result of A+B. The number of bit additions is
O(2n). We see that if we were to use this technique in the most simple-minded fashion to
add n shifted copies of an n-bit multiplicand, the delay will be O(n2). This occurs because
we assume that the add operations are dependent on previous add operations (the output
of earlier operations are inputs to later operations). See Figure 11.
Although the final result comes about from combining all add operations, a certain
amount of independence exists between each operation. We can consider the add
operation on a column by column basis; all the bits in a column must be added together,
along with the carry-in bits of the previous column. The delay in calculating the output of
a given column is a function of when the carry-in bits (from the previous column) are
available, as well as the number of bits which are to be added (Figure 11). Carry-save
addition leverages the fact that the add operations in separate columns can be performed
independently.
18

Figure 11. Partial product addition. (a) Full adder cell. (b) Basic ripple adder. (c) We can use ripple addition to add all the shifted copies of the multiplicand. (d) Since there are n-1 ripple adders, each of width n, this basic method takes O(n2).
If we are to add three vectors of bits, we can use full adders to add the three bits in each
column. The result is a carry and a sum bit at each bit position, except at the lowest and
highest bit positions, which have one bit each. We see that three bit vectors have been
“reduced” to two bit vectors, in the delay necessary for a full adder. Using this technique
called carry-save addition, we can ’reduce’ a set of vectors to be added together down to
two bit vectors. Since the full adders are the basic addition element, full adders used in
this context are often called carry-save adders or CSA’s. Using carry-save addition is the
prime reason why multiplication is much faster than would be predicted by the number of
additions necessary.
5.3. Array Style Reduction
Given the trapezoidal array of partial product bits which must be added using carry-save
addition, there exist several ways to implement a partial product reduction adder. In this
section, we describe the most basic method, called array partial product reduction.
For example, in Figure 12a, we see the trapezoidal PPA generated for a 6-bit by 6-bit
multiplication. We can take the first three bit vectors, and add them using full adders, as
in Figure 12b. Combining the results of the addition with the remaining bits of the PPA,
we get a result, which appears, in Figure 12c. As we can see, three vectors have been
reduced to two vectors.
19

Figure 12. Array partial product reduction- (a) the initial partial product (b) using a row of carry-save full adders to reduce 3 bit vectors down to two (c) resulting PPA (d) full array structure.Note that the outputs of this first set of full adders can now serve as inputs to another row
of full adders, along with another bit vector. This structure repeats until the full array is
instantiated as in Figure 12d.
The notable characteristic about the array architecture is its regular structure. This has the
advantage that it is very easy to lay out, as a single adder block and associated
connections are replicated the width and depth of the array. The delay of this block is a
function of the number of rows, O(n), which is a big improvement over the simple-
minded scheme of using conventional adders for each row. However, it is possible to do
better.
5. 4. Wallace Tree Partial Product ReductionIn 1964, C.S. Wallace observed that the later stages of the array structure must always
wait for all the earlier stages to complete before their final values will be established.
When performing a series of independent add operations, it is possible to create a
20

structure, which has less delay by performing the addition operations in parallel, where
possible. For example, in the partial product array for 6-bit x 6-bit multiplication, two
carry-save reductions can be done in parallel, resulting in a smaller PPA after just one
step (Figure 12a-c.) This can be repeated, yielding the structure shown in Figure 12d.
(The final set of connections is somewhat complicated to draw here).
Obviously, parallelizing the carry-save operations will yield a delay which is much
shorter than the array’s sequential series of operations. When using carry-save addition,
we take three input bit vectors and reduce these to two output bit vectors. A sequential
carry-save procedure will reduce the number of bit vectors by one at each stage, whereas
the parallel method can take sets of 3 vectors and reduce them to sets of 2 vectors. The
number of stages, and hence the delay of the sequential operation will be O(n), whereas
the parallel method will be O(log3/2n). Such parallel arrangements of CSA blocks are
called Wallace trees and allow for a large reduction in the delay of the partial product
reduction stage. The disadvantage of Wallace trees lies in their irregular layout
(especially with respect to array structures), resulting in potentially greater wire loads.
21

Figure 12. Wallace tree partial product reduction. (a) partial product array (b) parallel
carry-save addition (c) resulting PPA (d) complete Wallace tree structure.
Furthermore, note that array structures result in a final add operation of width n, whereas
the final adder in Wallace trees has a width of approximately 2n - log3/2 n.
5. 5. Partial Product Reduction/Generation Using Booth RecodingThe technique of Booth recoding is based on the observation that under certain
conditions, namely when a bit in the multiplier is ‘0’, a bank of carry-save adders does
not perform a useful function; that is, a ’0’ is added to the accumulated carry-save result,
and the input bits are simply propagated to the output bits. In this case, these carry-save
adders could be removed from the multiplier structure, resulting in delay and power
savings. Unfortunately, it is not generally possible to know a priori what bits of the
22

multiplier will be ‘0’. To maintain generality, we must provide for the case when all bits
of the multiplier are ’1’. It may be possible to reduce circuitry, however, if one considers
the largest delay case. In a 4 bit*4 bit multiplication, circuitry must be provided for the
case where the multiplier is ‘1111’---resulting in a delay of 4 stages. An important
observation is that multiplying by ‘1111’ is the same as multiplying by ‘10000’, and
subtracting the multiplicand from the result--- multiplying by a power of two is simply a
shift, so this costs two stages. Therefore, we have cut down our worst case from 4 stages
of delay to 2 stages of delay. This type of stage reduction can be generalized into the
technique known as Booth recoding. Three bits of the multiplicand are used to determine
whether a shifted and/or complemented copy of the multiplicand are to be used. Two bits
of the multiplicand are used multiplexed to created the actual value. The encoding
scheme is shown in Table 1.
The connections of the Booth multiplexors are shown in Figure 13. The net result is that
the size of the PPA array is reduced, since fewer shifted copies of the multiplicand are
necessary in the partial product array. The number of these multiplicand ‘copies’ needed
in the partial product array depends on the degree to which Booth recoding is applied.
Generally, each level of recoding cuts the number of partial product bits in half. There is
additional circuitry involved in performing the recoding however, so this optimization
entails inserting complicated logic which itself adds delay and power consumption. In
practice, Booth recoding is applied to one level (called radix-4) or two levels, but hardly
ever more than two levels.
23

Table 1 . Booth Encoding
Figure 13. Booth recoding (radix 4).
Booth recoding was initially applied to array multipliers, where a reduction in the size of
the PPA by two means reducing the delay of the partial product reduction stage by a
factor of two. Note, however, that cutting the size of the PPA in half has less of an impact
on the Wallace tree scheme, since Wallace trees reduce the size of the PPA at a
logarithmic rate; the savings from Booth recoding yield a reduction of 1-2 levels of logic.
Furthermore, there is logic involved in the actual Booth recoding process. Therefore, it is
24

unclear whether there is an advantage in applying Booth recoding to Wallace trees.
Doubts have been expressed about the validity of Booth recoding for Wallace trees even
for 64-bit x 64-bit multipliers. So we chose Wallace tree partial product reduction method
because it seems that its implementation is easier. Besides using the Wallace’s method
speeds up the multiplication high enough.
5.6. Final AdderA common method for achieving low delay in multipliers is to speed up the final addition
stage. Several optimizations exist for performing high-speed addition. The
straightforward application of these designs to multipliers has resulted in various designs
with high speed or low power.
We do not discuss various adder structures in this section and suppose it would be
discussed in the adder structure section of this report. However it should be noted that we
have used carry lookahead adder structure for the implementation of our final adder,
because this type of adders is faster than simple carry ripple adder structure.
Finally, the overall architecture of our multiplier is depicted in the next page. It is should
be noted that 16th bits of multiplier and multiplicand are sign bits. We splitted it from
multiplier and multiplicand and computed the sign of the result by using an XOR that its
inputs is the 16th bits of inputs. So the 31st bit of the result is A[15] XOR B[15], and the
30th bit of the result is zero. Other 30 bits should be computed by the multiplication of
two 15 bits unsigned multiplier and multiplicand as is shown in figure 14. Each of the F
blocks is an array of half adder and full adder cell that has three input and two outputs.
25

Figure 14. The overall structure of our multiplier.
26