ALPS: The Acoustic Location Processing SystemAlps: A bluetooth and ultrasound platform for mapping...
2
ALPS: The Acoustic Location Processing System Patrick Lazik Niranjini Rajagopal Sindhura Chayapathy Bruno Sinopoli Anthony Rowe Carnegie Mellon University {plazik,niranjir,schayapa,brunos,agr}@andrew.cmu.edu ABSTRACT We demonstrate the Acoustic Location Processing Sys- tem (ALPS), an ultrasonic Time-Of-Flight (TOF) and Time-Difference-Of-Arrival (TDOA) localization system for mobile devices. ALPS capitalizes on the ability of smartphones to detect audio above the human hear- ing range and does not require any additional hard- ware on the receiving side. Synchronized, multi-channel beacons deployed in the environment periodically send time-multiplexed ranging signals consisting of ultrasonic chirps. Each mobile device runs an application that records a snapshot of audio, determines the Time Of Arrival (TOA) or TOF of the captured ultrasonic sig- nals and then uses a cloud-based solver to compute its location. Bluetooth Low Energy (BLE) hardware inte- grated into the beacons allows for the identification of the captured ultrasonic signals in order to map them to individual transmitters and provides additional RSSI based location information. The relatively slow prop- agation of sound allows for accurate ranging in larger open spaces. A cloud-based floor-plan geometry aware location solver and an advanced beacon-placement al- gorithm aid in the elimination of localization errors and reduce the number of beacons required to cover a given space. 1. SYSTEM DESCRIPTION ALPS is an indoor ultrasonic ranging system that can be used to localize modern mobile devices like smart- phones and tablets in 2D space without requiring any additional hardware on the receiver side. The method uses a communication scheme in the audio bandwidth, Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. Copyright 2016 ACM X-XXXXX-XX-X/XX/XX ...$5.00. BLE Data Beacon Phone Figure 1: System Architecture just above the human hearing frequency range where mobile devices are still sensitive. ALPS uses a vari- ant of the ultrasonic modulation technique described in [3], where multiple beacons send time multiplexed ranging signals to any number of mobile receivers. The overall architecture in Figure 1 shows the main com- ponents which include the beacons, the mobile device that is being localized. The beacons are time synchro- nized using an 802.15.4 radio to enable high resolution TDOA ranging given the geographical origins of the sig- nals. The beacons continuously broadcast their trans- mission schedule via BLE to allow every receiver to map its captured ultrasound signals to the beacon that sent them. Once a receiver has successfully computed its lo- cation using TDOA ranging, it may synchronize itself to the transmitting infrastructure as described in [2]. This allows TOF ranging to be performed, reducing the amount of ultrasound signals that need to be captured successfully. Additional information from Inertial Mea- surement Unit (IMU) sensors on the phone and BLE RSSI data from the beacons is used to filter location estimates. 2. BEACON HARDWARE Figure 2 shows a diagram of an ALPS beacon. In our deployment, the beacons are mounted on tripod stands
Transcript of ALPS: The Acoustic Location Processing SystemAlps: A bluetooth and ultrasound platform for mapping...

ALPS: The Acoustic Location Processing System
Patrick Lazik Niranjini Rajagopal Sindhura Chayapathy Bruno Sinopoli Anthony Rowe
Carnegie Mellon University{plazik,niranjir,schayapa,brunos,agr}@andrew.cmu.edu
ABSTRACTWe demonstrate the Acoustic Location Processing Sys-tem (ALPS), an ultrasonic Time-Of-Flight (TOF) andTime-Difference-Of-Arrival (TDOA) localization systemfor mobile devices. ALPS capitalizes on the ability ofsmartphones to detect audio above the human hear-ing range and does not require any additional hard-ware on the receiving side. Synchronized, multi-channelbeacons deployed in the environment periodically sendtime-multiplexed ranging signals consisting of ultrasonicchirps. Each mobile device runs an application thatrecords a snapshot of audio, determines the Time OfArrival (TOA) or TOF of the captured ultrasonic sig-nals and then uses a cloud-based solver to compute itslocation. Bluetooth Low Energy (BLE) hardware inte-grated into the beacons allows for the identification ofthe captured ultrasonic signals in order to map themto individual transmitters and provides additional RSSIbased location information. The relatively slow prop-agation of sound allows for accurate ranging in largeropen spaces. A cloud-based floor-plan geometry awarelocation solver and an advanced beacon-placement al-gorithm aid in the elimination of localization errors andreduce the number of beacons required to cover a givenspace.
1. SYSTEM DESCRIPTIONALPS is an indoor ultrasonic ranging system that can
be used to localize modern mobile devices like smart-phones and tablets in 2D space without requiring anyadditional hardware on the receiver side. The methoduses a communication scheme in the audio bandwidth,
Permission to make digital or hard copies of all or part of this work forpersonal or classroom use is granted without fee provided that copies arenot made or distributed for profit or commercial advantage and that copiesbear this notice and the full citation on the first page. To copy otherwise, torepublish, to post on servers or to redistribute to lists, requires prior specificpermission and/or a fee.Copyright 2016 ACM X-XXXXX-XX-X/XX/XX ...$5.00.
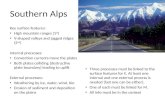
BLE Data
Beacon
Phone
Figure 1: System Architecture
just above the human hearing frequency range wheremobile devices are still sensitive. ALPS uses a vari-ant of the ultrasonic modulation technique describedin [3], where multiple beacons send time multiplexedranging signals to any number of mobile receivers. Theoverall architecture in Figure 1 shows the main com-ponents which include the beacons, the mobile devicethat is being localized. The beacons are time synchro-nized using an 802.15.4 radio to enable high resolutionTDOA ranging given the geographical origins of the sig-nals. The beacons continuously broadcast their trans-mission schedule via BLE to allow every receiver to mapits captured ultrasound signals to the beacon that sentthem. Once a receiver has successfully computed its lo-cation using TDOA ranging, it may synchronize itselfto the transmitting infrastructure as described in [2].This allows TOF ranging to be performed, reducing theamount of ultrasound signals that need to be capturedsuccessfully. Additional information from Inertial Mea-surement Unit (IMU) sensors on the phone and BLERSSI data from the beacons is used to filter locationestimates.
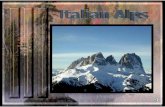
2. BEACON HARDWAREFigure 2 shows a diagram of an ALPS beacon. In our
deployment, the beacons are mounted on tripod stands

Ultrasound Ranging
BLE and 802.15.4Time Synchronization
Figure 2: ALPS Beacon
that will be placed throughout the target rooms. Eachbeacon consists of a multi-channel speaker array, whichcan broadcast ultrasonic ranging signals from differentsides of its casing which has a radius of 1m. The signalsare transmitted through omnidirectional horns, whichdisperse the ultrasound in a spherical pattern to obtainoptimal signal coverage. Figure 3 and Figure 4 showthe primary and secondary PCBs of an ALPS beaconrespectively. The primary PCB is responsible for timesynchronizing to other beacons via 802.15.4 and play-ing back the ranging signals. The secondary BLE PCBallows for coarse time synchronization to the receiversusing the method detailed in [1].
3. RECEIVER AND SOLVER DESCRIPTIONThe receivers can be any mobile device sensitive to
up to 24kHz of audio bandwidth that runs our localiza-tion software. The user downloads an application whichincludes a map constructed during installation. As theuser walks around the room, the application tracks theuser and provides the current location. The applicationwill be demonstrated on an iOS device.
Each receiver is responsible for demodulating incom-ing ultrasound ranging signals and determining the TOAor TOF of each signal. These values are then transmit-ted to a cloud-based solver, which solves for the loca-tion of the receiver based on the received TOA/TOFvalues, the location of the beacons, the receiver’s IMUdata, the BLE RSSI data from the beacons collected atthe receiver and the floor-plan geometry of the targetarea. By combining information from all of these in-puts, the solver is able to eliminate false solutions andreduce multi-path error and hence reduce the number ofbeacons required for localization. An advanced beaconplacement algorithm which calculates the Geometric-Dilution-Of-Precision (GDOP) over the entire target areadetermines the optimal placement for beacons in orderto exploit the floor-plan geometry to further minimizethe amount of beacons that are required.
TLV320'Audio'Codec' Atmega256RFR2'SoC' RF'Amplifier'Microphone'
Figure 3: ALPS Beacon Primary PCB
BLE Antenna802.15.4 Antenna CC2460 SoC
Figure 4: ALPS Beacon Secondary BLE PCB
4. REFERENCES[1] P. Lazik, N. Rajagopal, B. Sinopoli, and A. Rowe.
Alps: A bluetooth and ultrasound platform formapping and localization. In The 13th ACMConference on Embedded Networked SensorSystems (SenSys 2015), SenSys ’15, 2015.
[2] P. Lazik, N. Rajagopal, B. Sinopoli, and A. Rowe.Ultrasonic time synchronization and ranging onsmartphones. In IEEE Real-Time ApplicationsSymposium (RTAS 2015). IEEE, 2015.
[3] P. Lazik and A. Rowe. Indoor pseudo-ranging ofmobile devices using ultrasonic chirps. InProceedings of the 10th ACM Conference onEmbedded Network Sensor Systems, pages 99–112.ACM, 2012.