ALMA Real Time Control System Jeff Kern Ralph Marson, Thomas Juerges.
9
ALMA Real Time Control System Jeff Kern Ralph Marson, Thomas Juerges
-
Upload
gladys-goodman -
Category
Documents
-
view
214 -
download
1
Transcript of ALMA Real Time Control System Jeff Kern Ralph Marson, Thomas Juerges.

ALMA Real Time
Control System
Jeff Kern
Ralph Marson, Thomas Juerges

Real Time Control System
• Real Time Control is the portion of the system which has fixed timing requirements
• ALMA uses a 48-ms timing pulse to synchronize commands across the Array– Synchronization below the 48-ms level is
done in hardware

Real Time Subsystems in ALMA
• Fringe and Delay Tracking– Distributed: Done partially at the Antenna (64) and
partially in the Correlator (2)
• Antenna Pointing– At least 66 Antennas
• Data Acquisition– Correlators (2)– Total Power (Square Law) Detectors
• 2 kHz / Baseband / Polarization / Antenna
– Holography Receiver for Beacon Holography

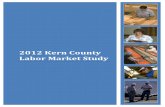
Hardware Architecture
Array Operations Site (AOS)
Operations Support Facility (OSF)
OperatorConsole(Master)
ArchiveOnlineProcessing
Antenna Bus Master(ABM)
HardwareDevice
48- ms Pulse
Array Real Time Machine
(ARTM)
ALMA CompactArray Correlator
12-M ArrayCorrelator
HardwareDevice
HardwareDevice
Ethernet
ALMA Monitor and Control Bus
(AMB)

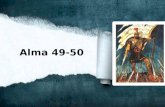
Software Architecture
• Most Control systems for large telescopes have the same high level architecture.
Master Archive
WeatherStation
Back End Front End Mount
Software Bus (Middleware)

ALMA Monitor and Control Bus (AMB)
• Controller Area Network (CAN)– 1 Mbit / s Multidrop Serial Protocol– 35-m Bus Length with up to 32 Nodes / bus– 29 Bit address scheme
• AMB adds to the Controller Area Network (CAN) standard.– Master-Slave architecture to prevent collisions on the
bus (provides determinism)– Broadcast protocol (device discovery)
• Timing Event • RS-485 Reset Pulse
November 17-21, Santiago 6ALMA Computing Review

Software Design
• Local Control Units (ARTM, ABM, etc) are Linux systems with a real time kernel– Real-Time code is written as kernel modules– Minimize real time code
• Timing Event interrupt handler• Real time aware device driver
• Non-Deterministic Ethernet between master and real time computers.– Commands are queued in advance (~1 sec) and are
executed by the interrupt handler.

Lessons Learned
• A larger middleware does not necessarily produce smaller device interfaces.
• Modern Programmable Logic Devices (FPGAs) are often a better solution than general purpose real time computers.– Better Latency– Integrated with the hardware– Allow true parallel behavior

Is this the End of Real Time?
• Some applications still require general purpose real time computers:– Data Acquisition– Real Time Data Processing (Adaptive Optics)– Distributed Servo Systems
• Small projects without a VHDL expert and no resources to invest in developing one.