
Algorithm Evaluation - NUS Computing - Homecs5240/lecture/evaluation.pdf · Colour Calibration...
23
Algorithm Evaluation CS5240 Theoretical Foundations in Multimedia Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (NUS) Algorithm Evaluation 1 / 23
Transcript of Algorithm Evaluation - NUS Computing - Homecs5240/lecture/evaluation.pdf · Colour Calibration...

Algorithm Evaluation
CS5240 Theoretical Foundations in Multimedia
Leow Wee Kheng
Department of Computer ScienceSchool of Computing
National University of Singapore
Leow Wee Kheng (NUS) Algorithm Evaluation 1 / 23
You Have Learned...
You Have Learned...
Main stages in computational problem solving:
1. Problem Formulation
2. Algorithm Development
3. Algorithm Evaluation
4. Looking Back
Now, we look at Stage 3 and Stage 4.Stage 4 is based on Stage 3.
Leow Wee Kheng (NUS) Algorithm Evaluation 2 / 23

Verification and Evaluation
Verification and Evaluation
You are quite familiar with testing:
◮ Collect test data with ground truth.
◮ Run algorithms on test data.
◮ Measure error of test results against ground truth.
Notes:
◮ This is good for measuring accuracy or error.
◮ Need to implement the algorithms.
◮ Need test data with ground truth.
Question: Can you do something before implementing algorithm?
Leow Wee Kheng (NUS) Algorithm Evaluation 3 / 23

Verification and Evaluation
Before implementing an algorithm, we can⊙
Verify Correctness:◮ Correctness: Does algorithm solve the defined problem correctly?◮ Optimality: Is algorithm optimal, as defined by the problem?
⊙
Evaluate Characteristics:◮ Complexity: What are its space and time complexities?◮ Convergence: Can the algorithm converge?◮ Robustness: Is algorithm robust against outliers?
After implementing an algorithm, we can⊙
Evaluate Performance:◮ Accuracy: How accurate is the algorithm?◮ Desirability: Is algorithm producing desired results?◮ Efficiency: How fast does the algorithm runs?◮ Convergence: Does the algorithm converge or fluctuate wildly?◮ Robustness: Is algorithm robust against outliers?
Leow Wee Kheng (NUS) Algorithm Evaluation 4 / 23
Verification and Evaluation
Surprise! A correct and optimal algorithm may not be desirable!
If problem definition is not defined appropriately,algorithm can be correct and optimal as defined in problem definition,but producing undesired results.
Example: Can you name a simple example of the above?
Leow Wee Kheng (NUS) Algorithm Evaluation 5 / 23

Colour Calibration
Colour Calibration
Let’s revisit a simple case:2 spatially aligned images, same lighting condition.
R T
p p
Leow Wee Kheng (NUS) Algorithm Evaluation 6 / 23

Colour Calibration
Problem Definition PA3Inputs
◮ Reference image R, colour of point p in R is v∗(p).
◮ Target image T , colour of point p in T is v(p).
◮ T and R are spatially aligned.
◮ T and R are captured under the same lighting condition.
Outputs
◮ Colour mapping function f from T to R.
Constraints
◮ f is a nonlinear function.
◮ For n points pi in T and R, the following colour difference isminimized:
n∑
i=1
‖f(v(pi))− v∗(pi)‖2. (1)
Leow Wee Kheng (NUS) Algorithm Evaluation 7 / 23
Colour Calibration
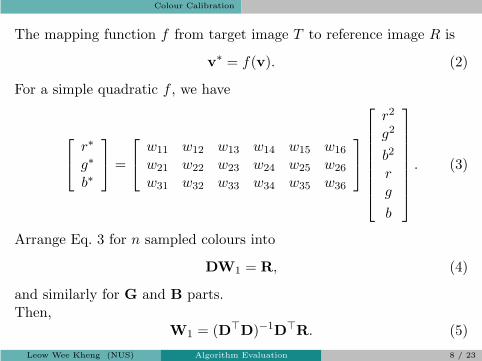
The mapping function f from target image T to reference image R is
v∗ = f(v). (2)
For a simple quadratic f , we have
r∗
g∗
b∗
=
w11 w12 w13 w14 w15 w16
w21 w22 w23 w24 w25 w26
w31 w32 w33 w34 w35 w36
r2
g2
b2
rg
b
. (3)
Arrange Eq. 3 for n sampled colours into
DW1 = R, (4)
and similarly for G and B parts.Then,
W1 = (D⊤D)−1D⊤R. (5)
Leow Wee Kheng (NUS) Algorithm Evaluation 8 / 23
Colour Calibration
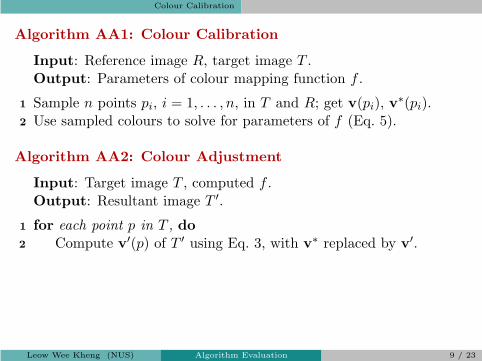
Algorithm AA1: Colour Calibration
Input: Reference image R, target image T .Output: Parameters of colour mapping function f .
1 Sample n points pi, i = 1, . . . , n, in T and R; get v(pi), v∗(pi).
2 Use sampled colours to solve for parameters of f (Eq. 5).
Algorithm AA2: Colour Adjustment
Input: Target image T , computed f .Output: Resultant image T ′.
1 for each point p in T , do2 Compute v′(p) of T ′ using Eq. 3, with v∗ replaced by v′.
Leow Wee Kheng (NUS) Algorithm Evaluation 9 / 23

Colour Calibration
Correctness:
◮ Algorithm AA1, with Eq. 5, gives least squares solution of Eq. 1.
Optimality:
◮ Eq. 5 (linear least squares) produces f that optimizes Eq. 1.
◮ But, Algorithm AA2 may not produce accurate results because ...
Convergence:
◮ No convergence issue:Algorithm AA1 is non-iterative.Algorithm AA2 is a simple repeat loop.
Complexity: Algorithm AA1
◮ Step 1: Random sampling, space and time complexities are O(n).
◮ Step 2: What about Eq. 5, linear least squares?
Leow Wee Kheng (NUS) Algorithm Evaluation 10 / 23
Colour Calibration
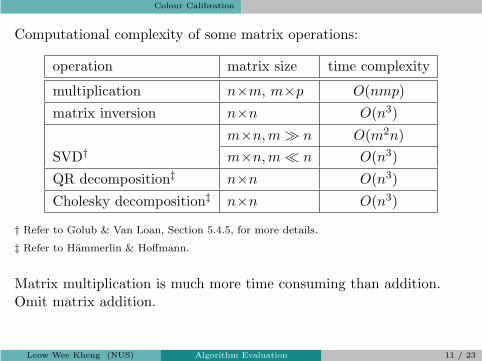
Computational complexity of some matrix operations:
operation matrix size time complexity
multiplication n×m, m×p O(nmp)
matrix inversion n×n O(n3)
m×n,m ≫ n O(m2n)
SVD† m×n,m ≪ n O(n3)
QR decomposition‡ n×n O(n3)
Cholesky decomposition‡ n×n O(n3)
† Refer to Golub & Van Loan, Section 5.4.5, for more details.
‡ Refer to Hammerlin & Hoffmann.
Matrix multiplication is much more time consuming than addition.Omit matrix addition.
Leow Wee Kheng (NUS) Algorithm Evaluation 11 / 23

Colour Calibration
Let’s look at Eq. 5 again:
W1 = (D⊤D)−1D⊤R (5)
D =
r2(p1) g2(p1) b2(p1) r(p1) g(p1) b(p1)...
......
......
...r2(pn) g2(pn) b2(pn) r(pn) g(pn) b(pn)
,
W1 =
w11
w12
w13
w14
w15
w16
, R =
r∗(p1)...
r∗(pn)
,
Matrix D W1 R
Size n×c (c = 6) c×1 n×1
Leow Wee Kheng (NUS) Algorithm Evaluation 12 / 23

Colour Calibration
operation matrix size time complexity
D⊤D c×n, n×c O(c2n)
(D⊤D)−1 c×c O(c3)
(D⊤D)−1D⊤ c×c, c×n O(c2n)
(D⊤D)−1D⊤R c×n, n×1 O(cn)
For n ≫ c, solving Eq. 5 requires O(cn) space, O(c2n) time.
Leow Wee Kheng (NUS) Algorithm Evaluation 13 / 23

Colour Calibration
Complexity: Algorithm AA1
◮ Step 1: Random sampling: O(n) space and time complexities.
◮ Step 2: Linear least squares: O(cn) space, O(c2n) time complexity.
◮ Overvall: O(cn) space complexity, O(c2n) time complexity
Complexity: Algorithm AA2
◮ Eq. 3: O(c2) space and time complexities for each pixel.
◮ For m pixels in T , need m iterations.
◮ Overall: O(m) space (for m ≫ c2), O(mc2) time complexity.
Conclusion:
◮ Since c = 6 is small, the algorithms are quite efficient.
⊙
Analysis of Algorithm AB1 is straightforward [Homework].
Leow Wee Kheng (NUS) Algorithm Evaluation 14 / 23

Skull Reconstruction
Skull Reconstruction
Reconstruct normal shape of defective skull using a normal reference.
Leow Wee Kheng (NUS) Algorithm Evaluation 15 / 23
Skull Reconstruction
Problem Definition PC2
⊙
Inputs:
◮ Reference model F , mesh points pi.
◮ Target model T with defective parts removed, mesh points qj .
⊙
Outputs:
◮ Point correspondence function c : R → T ∪ {∅},where ∅ denotes nothing.
◮ Shape change function f from pi to p′i.
◮ Resultant model R, mesh points f(pi).
Leow Wee Kheng (NUS) Algorithm Evaluation 16 / 23

Skull Reconstruction
⊙
Constraints:
◮ Close matching to T : main constraint, objective function
minimize∑
i,c(pi) 6=∅
‖f(pi)− c(pi)‖2.
◮ Minimize amount of no correspondence:
minimize |{i : c(pi) = ∅}|.
◮ R is normal:
minimize∑
i
‖f(pi)− pi‖2.
Leow Wee Kheng (NUS) Algorithm Evaluation 17 / 23

Skull Reconstruction
Algorithm AC2: Incremental Deformable Shape Registration
Input: Reference model F , target model T .Output: Resultant model R.
1 Spatially align F to T using Iterative Closest Point.2 Initialize R as spatially aligned F .3 for k = 1, . . . ,K do4 for each mesh point pi on R do5 Search for corresponding point c(pi) on T .6 Compute correspondence vector vi = c(pi)− pi.7 Compute target location ui = pi + (k/K)‖vi‖vi.
8 Apply shape change function f incrementally:R = f(R, T, k), i.e., {p′
i} = f({(pi,ui)}).
Leow Wee Kheng (NUS) Algorithm Evaluation 18 / 23

Skull Reconstruction
Correctness / Optimality:
◮ Similar to ICP, iterative shape change should satisfy Constraint 1.
◮ Satisfaction of Constraint 2 depends on correspondence search(Step 5).
◮ Constraint 3 is satisfied if shape change (Step 8) is not too drastic.
Convergence:
◮ ICP can converge [1].
◮ Steps 7 & 8 moves R closer and closer to T . Should converge.
Leow Wee Kheng (NUS) Algorithm Evaluation 19 / 23

Skull Reconstruction
Complexity:
◮ Step 1: Complexity of ICP [Homework].
◮ Step 5: Searching in a neighbourhood of m points is about O(m).
◮ Step 8: Depends on complexity of shape change algorithm.Example: For Laplacian deformation, most time-consuming part is
(A⊤2 A2)
−1A⊤2 A1d.
Matrix A1 A2 d
Size 3n×3m, n > m 3n×3(n−m) 3m×1
Overvall: O(n2) space complexity, O(n3) time complexity.
◮ With K iterations, total time complexity is O(Kn3).
Leow Wee Kheng (NUS) Algorithm Evaluation 20 / 23

Look Back
Look Back
Look back at your problem definition and algorithms:
◮ Is there another way to solve the problem?
◮ Can you improve the problem definition and/or algorithm?
Algorithm AA1
◮ Which kind of nonlinear function gives best accuracy?
Algorithm AC2
◮ Is TSP or Laplacian deformation more appropriate?
◮ How to better ensure satisfaction of Constraints 2 & 3?
Leow Wee Kheng (NUS) Algorithm Evaluation 21 / 23

Summary
Summary
After developing an algorithm (before implementation), always
◮ Verify correctness, optimality of algorithm with problem definition.
◮ Evaluate convergence and complexity of algorithm.
Need to understand problem definition and algorithm well!
After implementing (programming) an algorithm, always
◮ Evaluate desirability of test results.
◮ Evaluate accuracy of algorithm against ground truth data.
◮ Evaluate efficiency, convergence, robustness of algorithm.
Look back
◮ Is there another way to solve the problem?
◮ Can you improve the problem definition and/or algorithm?
Leow Wee Kheng (NUS) Algorithm Evaluation 22 / 23

References
References
1. P. J. Besl and N. D. McKay. A method for registration of 3-D shapes.IEEE Trans. on Pattern Analysis and Machine Intelligence, 14(2),239–256, 1992.
Leow Wee Kheng (NUS) Algorithm Evaluation 23 / 23


















