Agenda Path smoothing PID Graph slam. Path smoothing Until now we have worked with straight motions.
39
Agenda •Path smoothing •PID •Graph slam
-
Upload
elvin-mcdonald -
Category
Documents
-
view
219 -
download
1
Transcript of Agenda Path smoothing PID Graph slam. Path smoothing Until now we have worked with straight motions.
Agenda
• Path smoothing• PID• Graph slam

Path smoothing• Until now we have worked with straight
motions
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
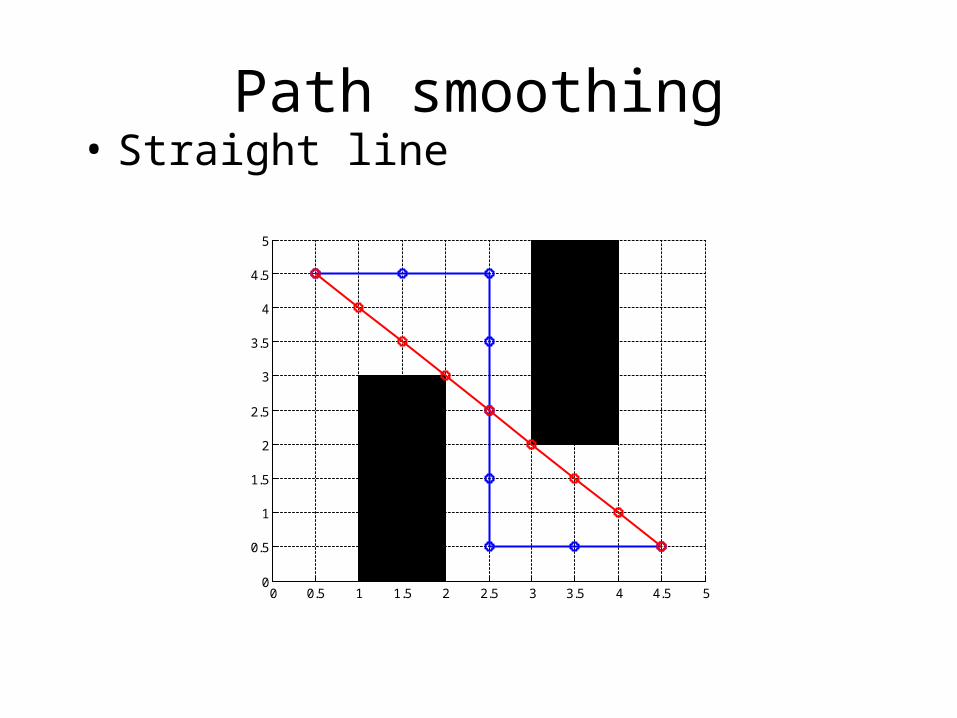
Path smoothing• Straight line
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5

Path smoothing• Smooth line
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
How do we smooth paths?
X0 X1
X2
X0 X1
X2

How do we smooth paths?
X0 X1
X2
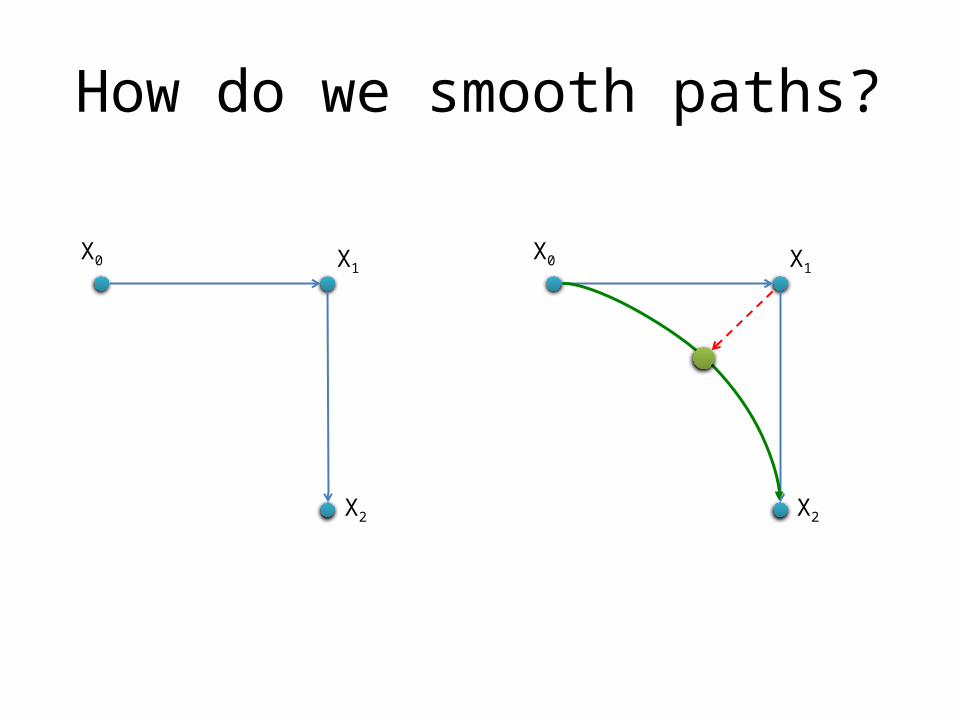
As we move X1 in we reduce the distance between X1 and X0 and X1 and X2. In other words as we move X1 the length of the red lines get smaller.
So how do we figure out how to move X1 to reduce the length of the red lines?

How do we smooth paths?
X0 X1
X2
We subtract X1 from each of its neighbours and add the difference to X1 . In other word:
1 1 0 1 2 1
1 1 0 2 12
x x x x x x
x x x x x
where α is a weight term that is used to control how quickly we move away from X1

How do we smooth paths?
X0 X1
X2
Quiz: what will happen if we repeatedly apply this update to our path?
1 1 0 2 12 x x x x x
We will end up with a straigth line

How do we smooth paths?
X0 X1
X2
Therefore we need a constraint to control the update to make it balance!
To do this we will iteratively move the point back towards the original point
Lets call the moving point Y1 to distinguish it from the original point X1
0 21 1 12 y x xy y

How do we smooth paths?
X0 X1
X2
We now define the counter weight, which drags the point Y1 back to the original position X1
1 1 11 y xy y

Additional terms
• Distance to wall• Fixed points• Similarity of two following segments
1x
1 1 2
1 1 2
i i i i i i
i i i i i i
x x x x x x
y y y y y y
1 1 2
1 1 2
i i i i i i
i i i i i i
x x x x x x
y y y y y y

Path smoothing Demo using gradient descent
D:\Skole\AU-TekniskIT\Kalman\Min præsentation\Eksempel\Path smooth demo\Pathsmooth.m

PID

PID controlling
Cross track error
Use the error to control the steering
Desired path

Closed loop control systems
• Use a measurement of output to control the input (Feedback)

PID control
P depends on the present error, I on the accumulation of past errors, D is a prediction of future errors,
e(t) = set point - process value
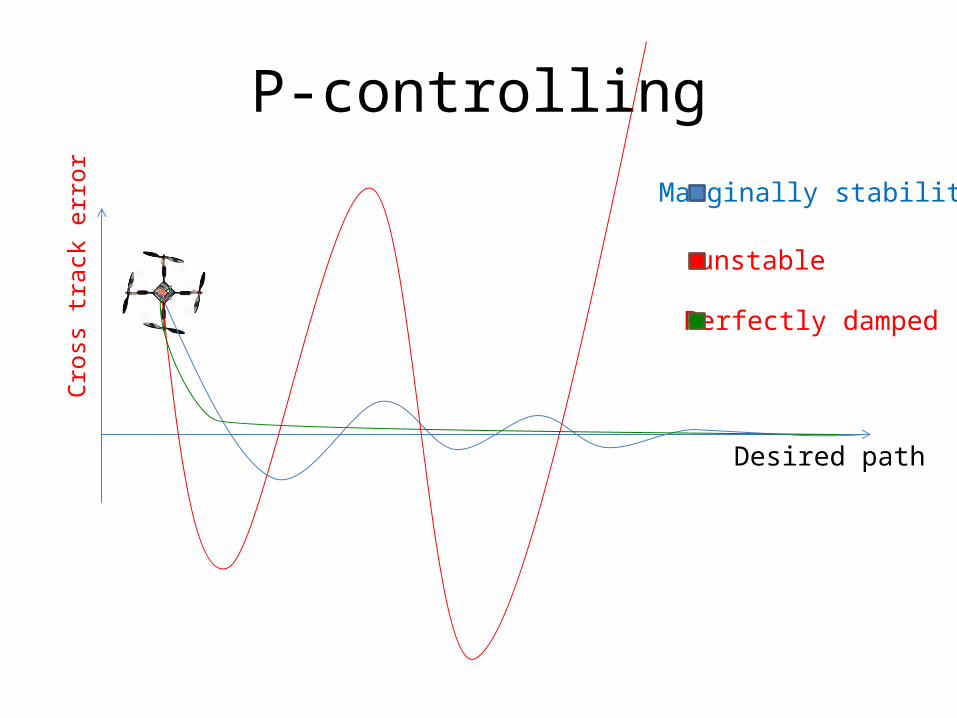
P-controllingCr
oss
trac
k er
ror Marginally stability
Desired path
unstable
Perfectly damped

Error term• The error term is derived by subtracting the
feedback (i.e. current position) from the set point (i.e. desired position).
• e(t) = u(t) – y(t)

Proportional Term• Simple proportional coefficient Kp is
multiplied by the error term.• Provides linear response to the error term.
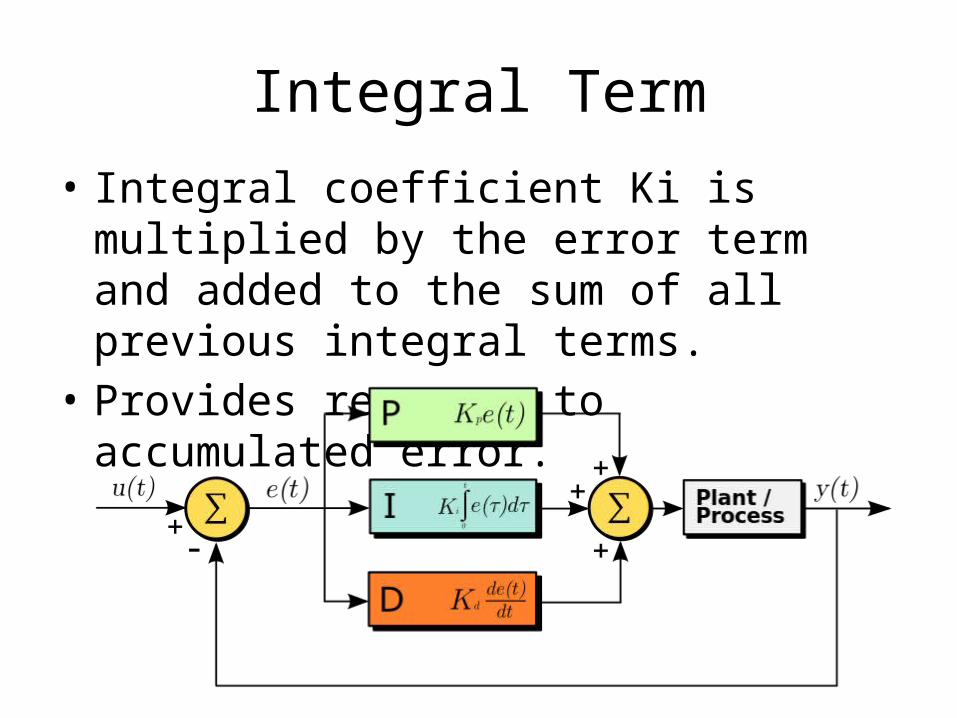
Integral Term• Integral coefficient Ki is multiplied by the error
term and added to the sum of all previous integral terms.
• Provides response to accumulated error.

Derivative Term• Derivative coefficient Kd is multiplied by the
difference between the previous error and the current error.
• The derivative term slows the rate of change of the controller output

Effects of increasing a parameter independently
Parameter Rise time Overshoot Settling time Steady-state error Stability
Decrease Increase Small change Decrease Degrade
Decrease Increase Increase Eliminate Degrade
Minor change Decrease Decrease No effect in theory
Improve if small
pK
IK
DK

Discrete PID algorithmprevious_error = setpoint - process_feedbackintegral = 0 while(1) {
wait(dt) error = setpoint - process_feedbackintegral = integral + (error*dt) derivative = (error - previous_error)/dtoutput = (Kp*error) + (Ki*integral) + (Kd*derivative) previous_error = error
}
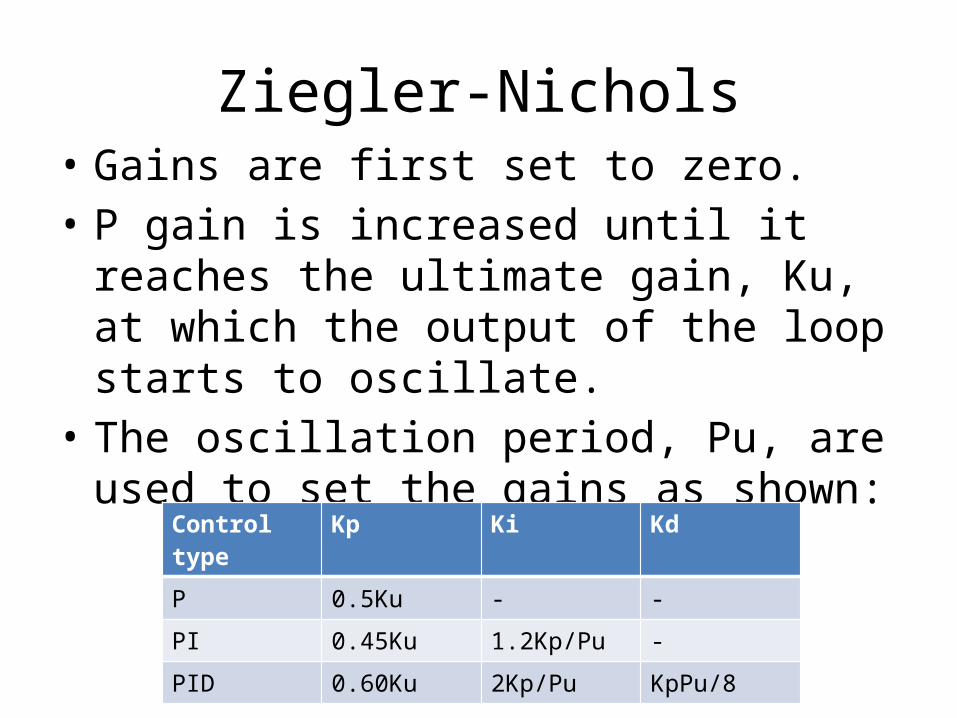
Ziegler-Nichols• Gains are first set to zero. • P gain is increased until it reaches the ultimate
gain, Ku, at which the output of the loop starts to oscillate.
• The oscillation period, Pu, are used to set the gains as shown:
Control type Kp Ki Kd
P 0.5Ku - -
PI 0.45Ku 1.2Kp/Pu -
PID 0.60Ku 2Kp/Pu KpPu/8
Demo 2D
• D:\Skole\AU-TekniskIT\Kalman\Min præsentation\Eksempel\PID demo\ PIDdemo.py
• D:\Skole\AU-TekniskIT\Kalman\Min præsentation\Eksempel\PID smooth\ PIDSmooth.py

= to be able to build a map of an environment and simultaneously localize within this map
Graph slam
• Is to use a graph whose nodes correspond to the poses of the robot at different points in time and whose edges represent constraints between the poses.

Graph slam problem
• To estimate the posterior probability of the robot’s path and the map given all the measurements plus an the initial position
• Assumption: The world is static
1:Tx m
0x
1: 1: 1: 0, | , ,
T T Tp x m z u x
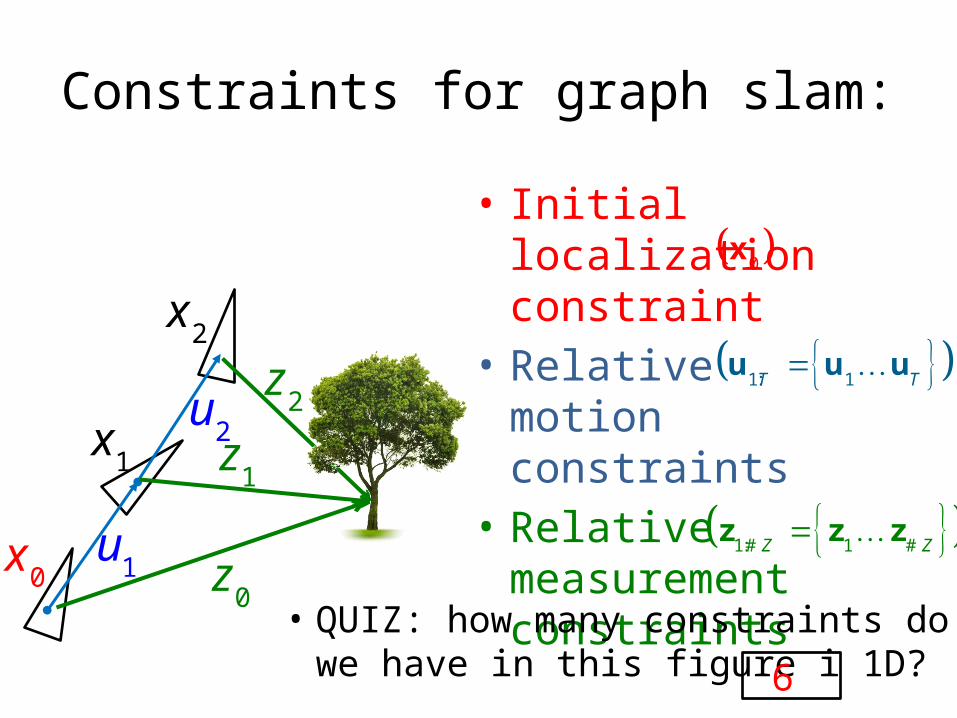
Constraints for graph slam:
• Initial localization constraint
• Relative motion constraints
• Relative measurement constraints
0x
1x
2x
0z
1z
2z
• QUIZ: how many constraints do we have in this figure i 1D? 6
1u
2u
0x
1: 1T Tu u u
1:# 1 #Z Zz z z

Implementation of Graph based slam
0X
TX
0Z #Z
Z
1X
TX
1Z
#ZZ
xy
xyxy
xy
x y x y x y x y
2 # 'T Z s
1
1

Implementation of Graph based slam
0X
TX
0Z #Z
Z
1X
TX
1Z
#ZZ
xy
xyxy
xy
x y x y x y x y
2 # 'T Z s
1
1
The best estimate
for all the robot locations and
landmark locations

Quiz: 1D Slam
0X 1
X0
Z1
Z
0X
1X
0Z
1Z
0 1
0 4
X X
44
1
1
11
0 1
0 1
4
4
X X
X X
Which cells will be modified?What will the values in the cells then be?

Quiz: 1D Slam
0X 1
X0
Z1
Z
0X
1X
0Z
1Z
1 0
0 3
X Z
4
41
1
11
12 1
1 3
7
1 0
1 0
3
3
X Z
X Z
Which cells will be modified?What will the values in the cells then be?

Quiz: 1D Slam
Which fields are not modifies?
0X 1
X0
Z1
Z
0X
1X
0Z
1Z
?
?
5
5
Quiz: 1D slam
0
2:
2X
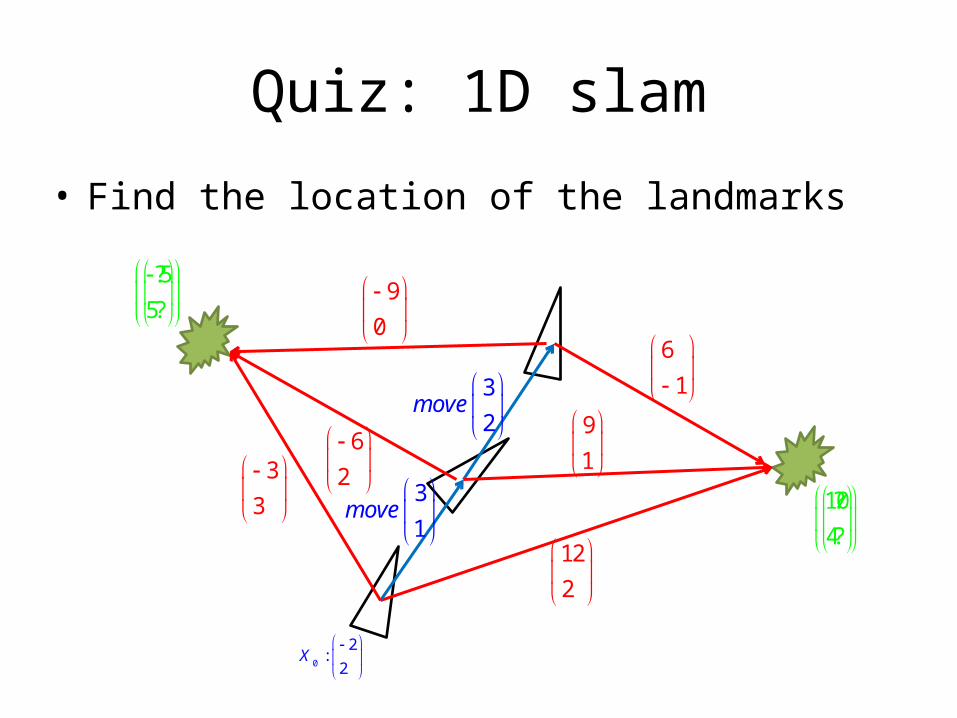
• Find the location of the landmarks
3
1move
3
2move
3
3
6
2
9
0
?
?
12
2
9
1
6
1
10
4
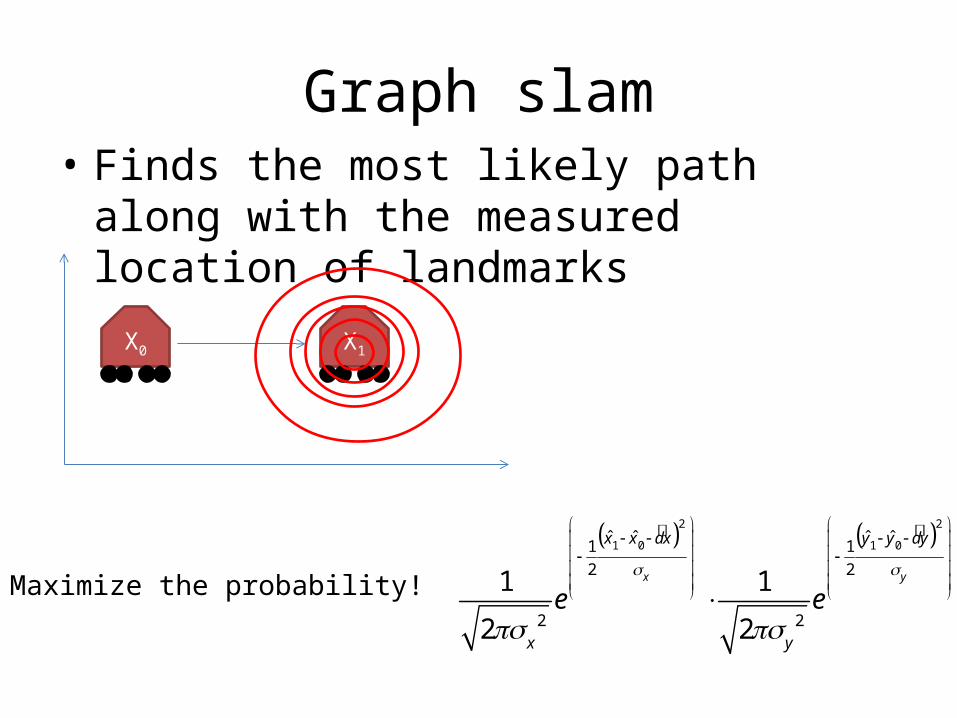
Graph slam• Finds the most likely path along with the
measured location of landmarks
X0 X1
2 2
1 0 1 0ˆ ˆ ˆ ˆ1 12 2
2 2
1 1
2 2
x y
x x dx y y dy
x y
e e
Maximize the probability!

Simplifying the probability maximization
2 2
1 0 1 1 1 1
1 1
1 1
ˆ ˆ ˆ ˆ ˆ1 12 2
2 2
1 1....
2 2
X Z
x x dx Z X X Z
X Z
e e
X0 X1 Z1
+
Finds the most likely path along with the measured location of landmarks

Demo with different measurement confidences
T0 T1
D:\Skole\AU-TekniskIT\Kalman\Min præsentation\Eksempel\Slam\slam.py

References
• https://www.udacity.com• http://www.comp.dit.ie/jkelleher/rtf/classmat
erial/week10/PathSmoothing.pdf