
ADSP Lec 02
46
Dr. Tahir Zaidi Advanced Digital Signal Processing Spring 2012 Lecture 2 Signal Representation and Time Domain Analysis
-
Upload
imran-shah -
Category
Documents
-
view
223 -
download
0
description
ADSP Lec 02
Transcript of ADSP Lec 02

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 1/46
Dr. Tahir Zaidi
Advanced Digital Signal Processing
Spring 2012
Lecture 2
Signal Representation and Time
Domain Analysis

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 2/46
2
Multidimensional Digital Signals
Digital Photography
Digital Video
x1
x2
x1 x2 x (time)
Digital Speech

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 3/46
Basic Types of Digital SignalsBasic Types of Digital Signals

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 4/46
2-D Signals

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 5/46
2-D Unit Impulse Sequence

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 6/46
2-D Line Impulse Sequence

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 7/46
2-D Unit Step Sequence

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 8/46
Basic Types of Digital Signals

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 9/46
Sine and Exp Using Matlab
n = 0: 1: 50;
% amplitude
A = 0.87;
% phase
theta = 0.4;% frequency
omega = 2*pi / 20;
% sin generationxn1 = A*sin(omega*n+theta);
% exp generation
xn2 = A.^n;

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 10/46
Basic Operations

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 11/46
Operations in Matlab
xn1 = [1 0 3 2 -1 0 0 0 0 0];
xn2 = [1 3 -1 1 0 0 1 2 0 0];
yn = xn1 + xn2;

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 12/46

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 13/46
x[n] via impulse functions

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 14/46
Input: sum of weighted shifted impulses

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 15/46
x[n1,n2] via impulse functions

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 16/46
Time Domain Analysis

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 17/46
Linear Time-Invariant Systems

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 18/46
Linear

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 19/46
Li Ti I i S

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 20/46
Linear Time-Invariant SystemsLinear Time-Invariant System
Li Ti I i S

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 21/46
Linear Time-Invariant System

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 22/46
Input: sum of weighted shifted impulses

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 23/46
Using Linearity and Time-Invariance for the impulses

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 24/46
Sum of wt. Shifted impulses – sum of wt. Shifted impulse responses
LTI S t

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 25/46
LTI System
T

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 26/46
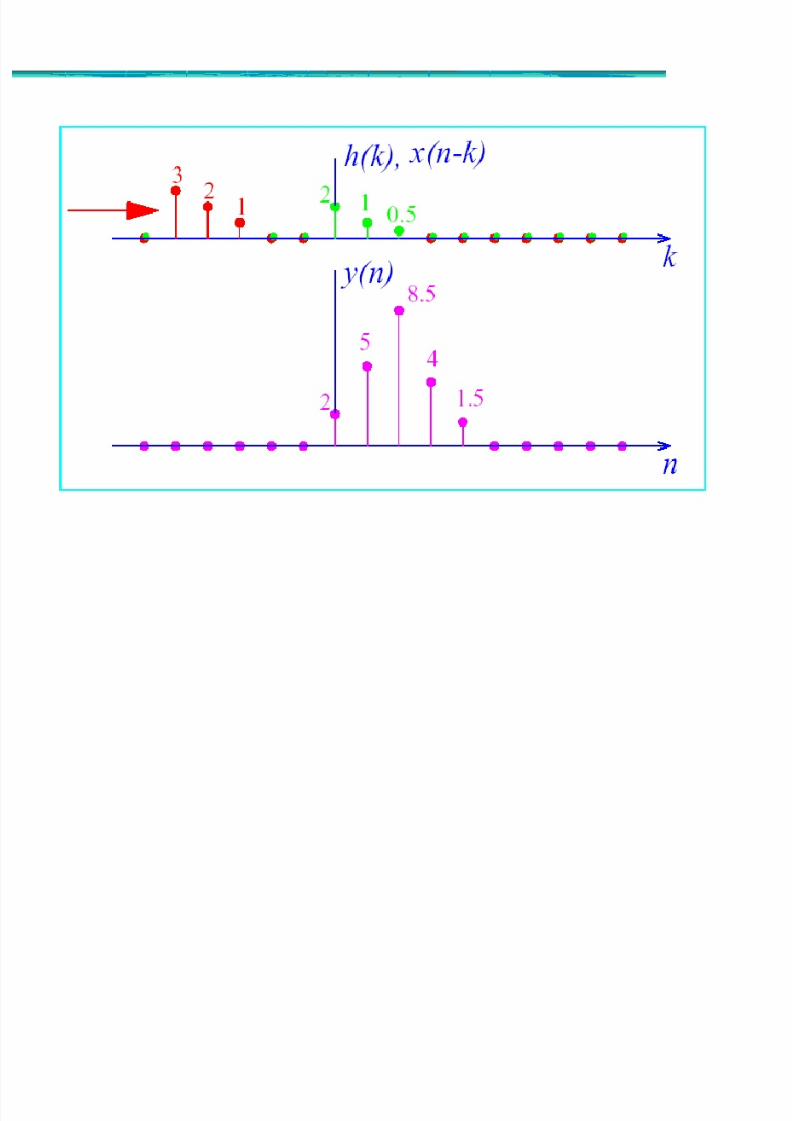
Two ways
As the representation of the output as asum of delayed and scaled impulseresponses.
As a computational formula forcomputing y[n] (“y at time n”) from theentire sequences x and h.
Form x[k]h[n-k] for -∞<k<+∞ for a fixed n
Sum over all k to produce y[n]

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 27/46
2-D Linear Shift Invariant (LSI) System

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 28/46
2-D Linear Shift Invariant (LSI) System
[ ] [ ] [ ]k h k

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 29/46
Convolution in the time domain: [ ] [ ] [ ]k
y n x k h n k
y[n] = 2 –3 3 3 –6 0 1 0 0
E l C l ti f T R t l

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 30/46
Example-Convolution of Two Rectangles
Example (Continued)

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 31/46
Example..(Continued)
E l C l ti Of T S

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 32/46
Example-Convolution Of Two Sequences
7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 33/46
Stability

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 34/46
Stability
Causality

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 35/46
Causality
Causality & Stability Example

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 36/46
Causality & Stability- Example
Properties of Convolution

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 37/46
Properties of Convolution
Properties of Convolution 2 D

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 38/46
Properties of Convolution 2-D
Difference Equation
7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 39/46
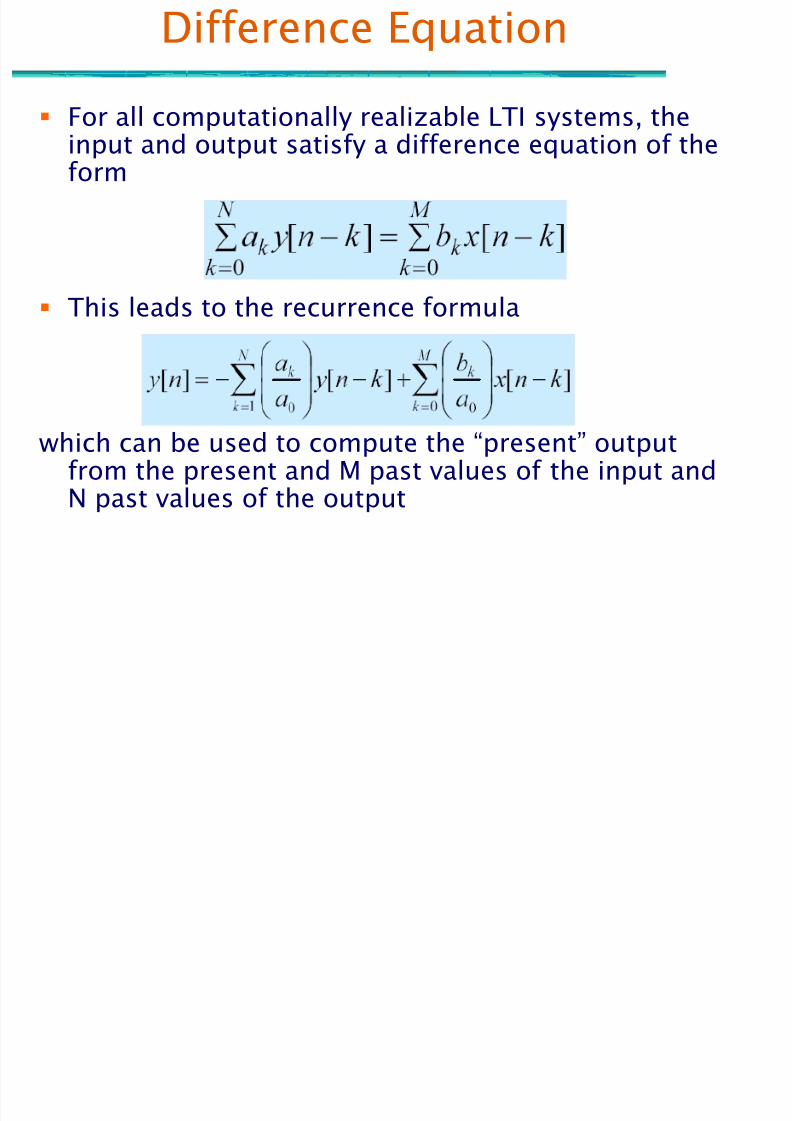
Difference Equation
For all computationally realizable LTI systems, the
input and output satisfy a difference equation of theform
This leads to the recurrence formula
which can be used to compute the “present” outputfrom the present and M past values of the input andN past values of the output
7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 40/46
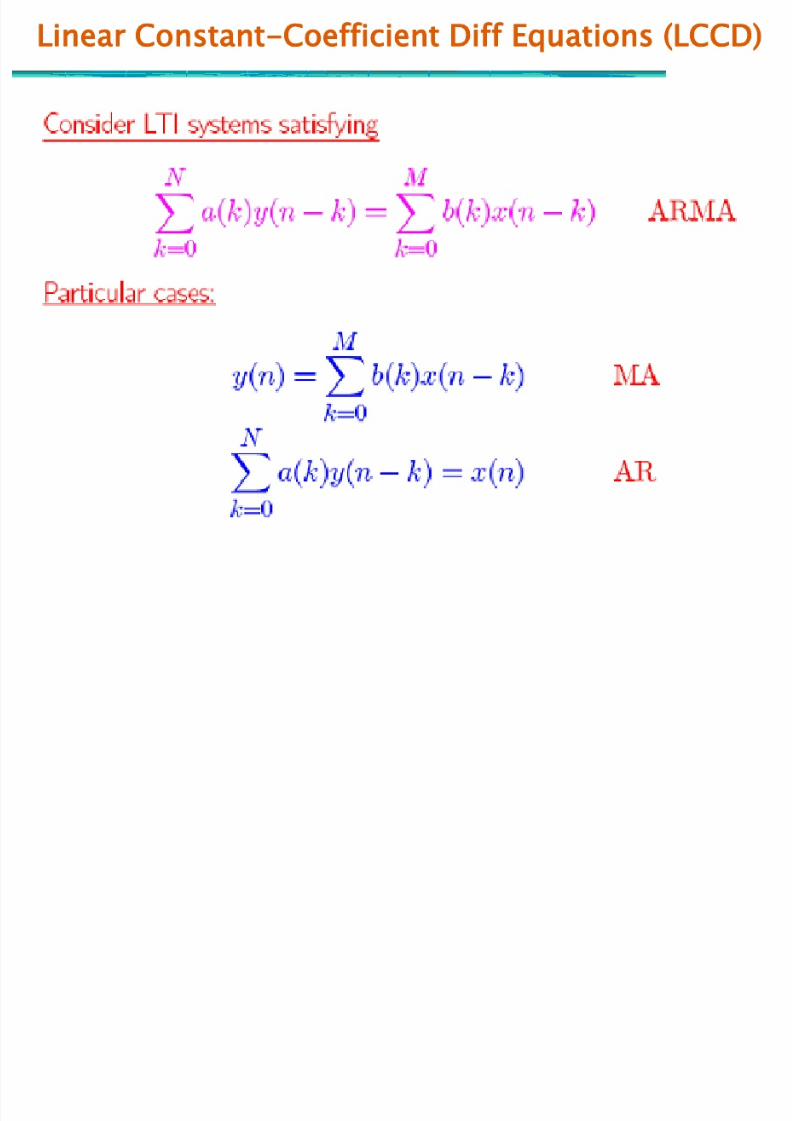
Linear Constant-Coefficient Diff Equations LCCD)
First Order Example
7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 41/46
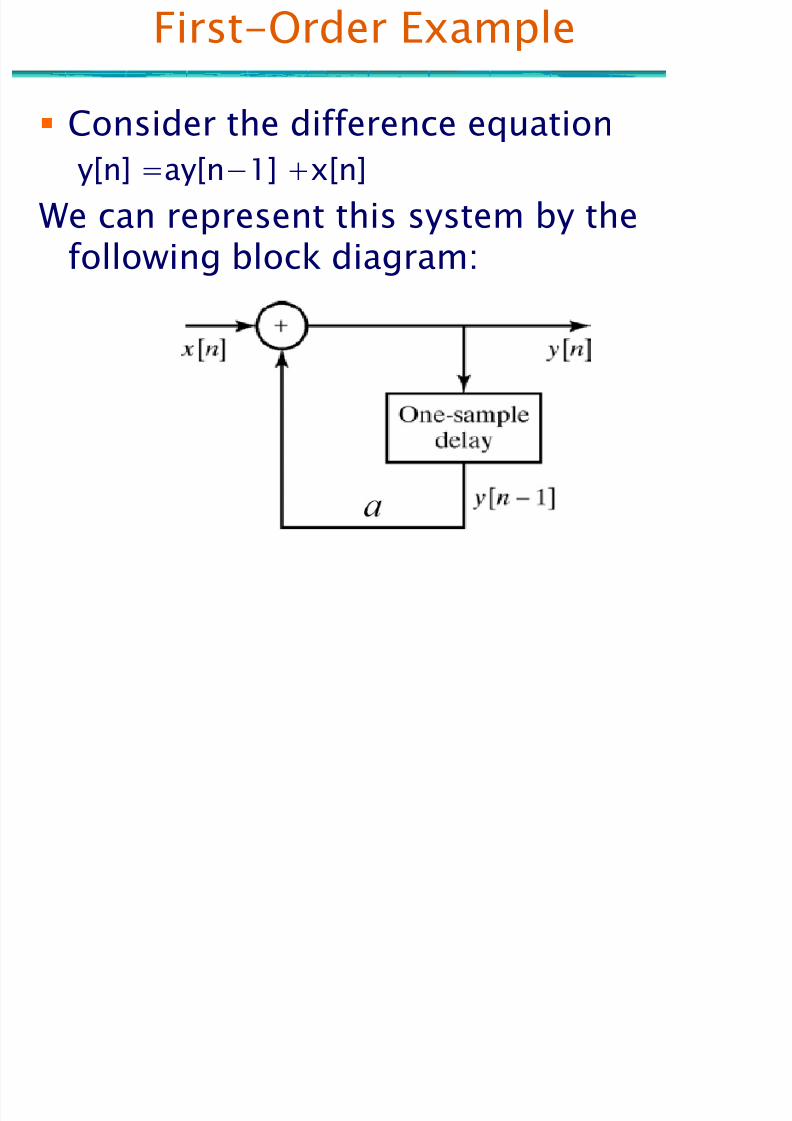
First-Order Example
Consider the difference equationy[n] =ay[n−1] +x[n]
We can represent this system by thefollowing block diagram:

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 42/46
Linear Constant-Coefficient Diff Equations LCCD)

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 43/46
Digital Filter

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 44/46
Digital Filter
Y = FILTER(B,A,X)
filters the data in vector X with the filter described by
vectors A and B to create the filtered data Y. The filter
is a "Direct Form II Transposed" implementation of the
standard difference equation:
a(1)*y(n) = b(1)*x(n) + b(2)*x(n-1) + ... +
b(nb+1)*x(n-nb) - a(2)*y(n-1) - ... - a(na+1)*y(n-na)
[Y,Zf] = FILTER(B,A,X,Zi)
gives access to initial and final conditions, Zi and Zf, of
the delays.
LTI summary

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 45/46
LTI summary
Complex Exp Input Signal

7/18/2019 ADSP Lec 02
http://slidepdf.com/reader/full/adsp-lec-02 46/46
Complex Exp Input Signal


















