ADDITIVE INCREASE-MULTIPLICATIVE DECREASE CONTROL EV …
88
ADDITIVE INCREASE-MULTIPLICATIVE DECREASE CONTROL OF CHARGING RATE TO ENABLE MASS EV-GRID INTEGRATION by EMIN YILMAZ UCER MITHAT CAN KISACIKOGLU, COMMITTEE CHAIR MURAT YUKSEL ANDREW LEMMON A THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in the Department of Electrical and Computer Engineering in the Graduate School of The University of Alabama TUSCALOOSA, ALABAMA 2019
Transcript of ADDITIVE INCREASE-MULTIPLICATIVE DECREASE CONTROL EV …

ADDITIVE INCREASE-MULTIPLICATIVE DECREASE CONTROL
OF CHARGING RATE TO ENABLE MASS
EV-GRID INTEGRATION
by
EMIN YILMAZ UCER
MITHAT CAN KISACIKOGLU, COMMITTEE CHAIRMURAT YUKSEL
ANDREW LEMMON
A THESIS
Submitted in partial fulfillment of the requirementsfor the degree of Master of Science
in the Department of Electrical and Computer Engineeringin the Graduate School of
The University of Alabama
TUSCALOOSA, ALABAMA
2019

Copyright EMIN YILMAZ UCER 2019ALL RIGHTS RESERVED

ABSTRACT
Electric vehicles (EVs) are finally making their way onto the highways worldwide
but the challenges with respect to their long charging time and its impact on the utility
distribution grid are still waiting to be resolved. Uncontrolled charging is likely to cause
power network congestion that will result in voltage violations, power losses and imbal-
ances, overloading of grid infrastructure and even their failures. For this reason, many con-
trol algorithms considering centralized and decentralized solutions have been proposed.
However, none has been standardized as a practical solution that can easily be imple-
mented at end-nodes. The today’s Internet also had a similar problem on its early days.
Its core control protocol has led to its ever-growing nature that still stably operates to-
day allowing for the integration of millions of new devices almost every day. Behind this
success story of the Internet lies its congestion avoidance algorithm: Additive Increase
and Multiplicative Decrease (AIMD). This algorithm has proven itself to provide a sta-
ble and fair operation, and therefore can be considered as an important candidate for the
EV charging problem as well. This thesis work adapts the AIMD concept from the Inter-
net and proposes a counterpart EV charging algorithm. It investigates the core similarities
and differences between the Internet and power distribution network and presents a de-
tailed analysis on distribution network modeling to show how AIMD can be adapted and
implemented. Finally, it proposes some statistical methods for a fully decentralized and
practical implementation of AIMD on real distribution networks.
ii

DEDICATION
This work is dedicated to my parents and my brothers for all their support and en-
couragement during my studies. It is also dedicated to all the giants of science for their
extraordinary effort and ambition to truly discover the existence.
iii

LIST OF ABBREVIATIONS AND SYMBOLS
A Cross-sectional Area
ACK Acknoledgment
EWMA Exponentially Weighted Moving Average
AI Additive Increase
AIMD Additive Increase and Multiplicative Decrease
α Additive Increase Parameter
β Multiplicative Decrease Parameter
D Congestion Period
d Average Congestion Period
δ Quantile
D Distance to Substation
ε EWMA Coefficient
EV Electric Vehicle
I Current
k Voltage Reduction Constant
L Line Segment Length
λ EWMA Coefficient
LV Low Voltage
MC Monte-Carlo Analysis
MD Multiplicative Decrease
µ Mean
MV Medium Voltage
n Number of End-nodes
iv

P Power
p Decision Probability
R Resistance
ρ Resistivity
RTO Re-transmission Timeout
RTT Round Trip Time
X Random Variable
SOC State of Charge
Ta Algorithm operation Period
TCP/IP Transmission Control Protocol/Internet Protocol
t Time
V Voltage
V Voltage Mean
V Voltage Standard Deviation
σ2 Variance
Vth Voltage Threshold
wi ith User Share
X Reactance
Z Impedence
v

ACKNOWLEDGMENTS
This study was supported by the National Science Foundation (NSF) under Award
No 1755996. I would like to thank my advisor, Prof. Mithat Can Kisacikoglu, and Prof.
Murat Yuksel for their support, feedback and suggestions during the preparation of my
thesis. I also would like to thank Prof. Ali Gurbuz for his help with the development of
some algorithms. Without their helps and participation this work would have never been
possible.
vi

CONTENTS
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
DEDICATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
LIST OF ABBREVIATIONS AND SYMBOLS . . . . . . . . . . . . . . . . . . . . . iv
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
CHAPTER 1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
CHAPTER 2 LITERATURE REVIEW . . . . . . . . . . . . . . . . . . . . . . . . . 5
CHAPTER 3 THE GENERAL AIMD ALGORITHM FOR EV CHARGING . . . . 12
CHAPTER 4 ANALOGY BETWEEN EV CHARGING AND INTERNET . . . . . 17
4.1 Why AIMD for EV Charging? . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.2 An EV Charging Control Algorithm Based on AIMD . . . . . . . . . . . . . 18
4.3 Distribution Grid Congestion Detection Using Local Voltage Measurements . 20
4.3.1 Power Distribution Grid Operation and Modeling . . . . . . . . . . . 20
4.3.2 Voltage vs. Distance Relationship . . . . . . . . . . . . . . . . . . . . 22
4.3.3 Ideal Maximally Fair Charging . . . . . . . . . . . . . . . . . . . . . 25
4.3.4 Realistic Grid Modeling . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3.5 System Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3.6 EV Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3.7 Distribution Grid Modeling . . . . . . . . . . . . . . . . . . . . . . . 34
vii

4.3.8 Residential and Commercial Load Modeling . . . . . . . . . . . . . . 35
4.4 Learning EV Impact on Voltages . . . . . . . . . . . . . . . . . . . . . . . . 36
4.4.1 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.4.2 Analysis and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.5 Local Congestion Detection Methods . . . . . . . . . . . . . . . . . . . . . . 41
4.5.1 Historical Threshold Calculation . . . . . . . . . . . . . . . . . . . . . 42
4.5.1.1 Verification of Voltage vs. Distance Relationship . . . . . . 43
4.5.1.2 Using Quantile for Threshold Calculation . . . . . . . . . . 45
4.5.2 Real-time Threshold Calculation . . . . . . . . . . . . . . . . . . . . 47
CHAPTER 5 SIMULATION STUDY FOR AIMD ON EV CHARGING CONTROL 50
5.1 AIMD with Historical Threshold Calculation . . . . . . . . . . . . . . . . . . 50
5.2 AIMD with Real-Time Threshold Calculation . . . . . . . . . . . . . . . . . 60
CHAPTER 6 CONCLUSION AND FUTURE WORK . . . . . . . . . . . . . . . . 64
6.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.3 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
viii

LIST OF TABLES
Table 5.1 Performance scores of historical threshold calculation . . . . . . . . . . 52
Table 5.2 Performance scores of real-time threshold calculation . . . . . . . . . . . 63
ix

LIST OF FIGURES
Figure 1.1 Analogy between EV charging over the distribution grid and the down-loads over the Internet. . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Figure 2.1 Centralized and decentralized control architectures used in EV charg-ing problem. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 2.2 Degree of decentralization curves. The need for local or global informa-tion defines the degree of decentralization of the control architecture. . . 7
Figure 3.1 Capacity share w(n) over time with AIMD in action as n tends to in-finity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 4.1 TCP’s congestion control management: As end users keep increasingtheir sending rate, throughput first increases, but then saturates andsharply reduces. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 4.2 An example of a radial distribution grid. . . . . . . . . . . . . . . . . . 21
Figure 4.3 Simplified radial distribution grid model. . . . . . . . . . . . . . . . . . 24
Figure 4.4 Repeated pattern in the distribution system model. . . . . . . . . . . . 24
Figure 4.5 Relationship between voltage and distance. . . . . . . . . . . . . . . . . 25
Figure 4.6 Main feeder voltage and currents (a) and power (b) wrt. distance. . . . 29
Figure 4.7 (a) Lateral voltage and currents (a) and power (b) wrt. distance. . . . . 30
Figure 4.8 (a) End-node voltage and currents (a) and power (b) wrt. distance. . . 30
Figure 4.9 Case 1 (no control): Voltages (a) and charging powers (b) . . . . . . . . 31
Figure 4.10 Case 2 (least fair): Voltages (a) and charging powers (b) . . . . . . . . 31
Figure 4.11 Case 3 (AIMD): Voltages (a) and charging powers (b) . . . . . . . . . . 32
x

Figure 4.12 Case 4 (AIMD w/o household loads): Voltages (a) and charging powers(b) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figure 4.13 Primary and secondary distribution network implemented in the MAT-LAB model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Figure 4.14 MATLAB Simulink phasor model used for the analysis of the IEEE37-Bus test system. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 4.15 16 days (shown in different colors) of power consumption data of ahousehold. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 4.16 A sample household power consumption profile. . . . . . . . . . . . . . 37
Figure 4.17 Voltage profiles of 5 houses at 0% EV penetration valid for both simu-lation sets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 4.18 Voltage profiles of 5 houses with no EVs at (a) 20% and (b) 40% EVpenetration (simulation set-1). . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 4.19 Voltage profiles of 5 houses with EVs at (a) 20% and (b) 40% EV pen-etration (simulation set-2) . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 4.20 Voltage profile of house-3 at 0% (a), 20% (b), and 40% EV penetration(simulation set-2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 4.21 MATLAB Simulink phasor model used for the low voltage distributiongrid. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Figure 4.22 Comparison between measured and analytically obtained main nodevoltages. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Figure 4.23 Calculating voltage threshold using voltage distribution. . . . . . . . . . 46
Figure 4.24 Chebyshev’s inequality for outlier estimation. . . . . . . . . . . . . . . . 49
Figure 5.1 Box-plot of voltages averaged over 6:00pm-6:15pm for 10 houses after100 days at full charging power. . . . . . . . . . . . . . . . . . . . . . . 51
Figure 5.2 Node voltage, voltage threshold and charging current waveforms of asingle vehicle as AIMD is in action. . . . . . . . . . . . . . . . . . . . . 52
Figure 5.3 Average EV charging powers at 10% penetration after the implementa-tion of AIMD with learned threshold values. . . . . . . . . . . . . . . . 53
xi

Figure 5.4 Box plot representation of 32 end-node voltages between (20% penetra-tion) 6:00pm-6:15pm for (a) 1st week, (b) 3th week, (c) 6th week, and(4) 10th week. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figure 5.5 Average charging power of EVs (20% penetration) for (a) 1st week, (b)3th week, (c) 6th week, and (4) 10th week. . . . . . . . . . . . . . . . . . 55
Figure 5.6 Box plot representation of 32 end-node voltages (20% penetration) be-tween 6:00-6:15pm for (a) 1st week, (b) 10th week, (c) 20th week, and(d) 30th week. (w/ k regulation) . . . . . . . . . . . . . . . . . . . . . . 57
Figure 5.7 Average charging power of EVs (20% penetration) for (a) 1st week, (b)10th week, (c) 20th week, and (4) 30th week. (w/ k regulation) . . . . . 58
Figure 5.8 SOC variations of 32 vehicles (20% penetration) over the time periodbetween 4:00pm - 12:00am. . . . . . . . . . . . . . . . . . . . . . . . . 59
Figure 5.9 Total power of the system along with the base power (no EV) in 1st,10th, 20th, 30th, 40th, and 50th, weeks between 4:00-12:00pm interval. . . 59
Figure 5.10 Voltage profiles of 416 households for (a) 0% and (b) 100% EV pene-tration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Figure 5.11 Voltage profiles under AIMD with (a) 25% and (b) 50% EV penetration. 61
Figure 5.12 (a) Voltage profiles under AIMD (100% EV penetration), (b) powerconsumption of the grid. . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Figure 5.13 (a) SOC Levels (100% EV penetration), (b) average charging powers. . 62
Figure 5.14 (a) Comparison of charging powers for different penetration levels, (b)sample current waveform of a random EV. . . . . . . . . . . . . . . . . 63
xii

CHAPTER 1
INTRODUCTION
The today’s transportation system is on the brink of a substantial change with the
integration of electric vehicles (EVs). Today, only 0.4% of all cars in the world are elec-
tric driven, but the projections show that by 2040 the number of EVs on the road will be
around 540 million, or about 32% of all vehicles [12]. There are many different advantages
of EVs over the traditional combustion-engine vehicles that are leading up to this transi-
tion. Zero tailpipe CO2 emissions, more efficient energy conversion, less moving parts and
simpler maintenance are just a few to name. Considering all these benefits, EVs seem to
be a reasonable choice for the transformation system of the future. Therefore, many coun-
tries are now taking legislative actions promoting EV growth by setting long term goals in
terms of EV percentage in the market and on the roads [26]. To comply with it, car man-
ufacturers are also gradually shifting their product range to EVs to become a part of this
transition and investing in research and development (R&D) to develop necessary industry
standards and the state-of-the-art technology for new generation vehicles [26].
Despite such driving motivations and benefits behind the electrification of trans-
portation, EV integration is being challenged by their long charging duration and its detri-
mental impacts on our traditional power system. To relieve the range anxiety, EV manu-
facturers equip their vehicles with batteries with high capacities that can rate up to 90 kWh,
and this results in long charging times. As a example, residential EV charging can occur
with level-1 (120V) and level-2 (240V) options at maximum charging powers of 1.9 kW
and 19.2 kW, respectively. A single-story residential household in the US, on the other
1

hand, has an average peak power consumption of about 7 kW [15]. Apparently, even a
moderate EV charging of 7 kW with level-2 can cause a power demand as much as that
of the household itself. This technically means building one more house next to it in terms
power consumption. By high penetration of EVs, one can simply refer to the case where
almost everybody owns an EV and charges it usually after arriving home from work (peak
hours). This level of integration is likely to create an enormous power demand, which if
not properly controlled, can cause transformer and line congestion in the distribution grid.
Among some adverse effects of this congestion are severe voltage drops, increased peak
loading, thermal overheating, and even failure of equipment [11, 17, 18, 30, 43, 48, 52, 58].
By upgrading the overloaded/stressed components in the distribution grid, the utility com-
panies can alleviate the challenges imposed by the EVs. However, this would be a very
coarse and costly solution to the society. An alternative solution to this problem is smart
EV charging management.
The future’s charging management of EVs necessitates the need for smart and at-
tentive control and coordination of distributed end-nodes in the distribution grid. This
kind of demand side management of resources to avoid possible congestion in a network is
a very popular engineering problem that was also heavily studied especially in the devel-
opment of today’s Internet [10]. Today’s Internet owns its standards and protocols thanks
to years of debates and research around the congestion problem. Its early days suffered
congestion control challenges as the number of endpoints drastically increased [27]. Ob-
served congestion collapses [20, 36] revealed the need for a solution that assures both the
stability of the system and the fair and efficient utilization of the network capacity. Due
to the multi-provider nature of the Internet as well as the scale complexity of the problem,
the solution has been best realized at smart endpoints operating with entirely end-to-end
(E2E) and local measurements. The mainstream transport protocol, TCP, adopted this
decentralized E2E congestion control approach [4]. Although significant effort has also
been spent in centralized [8] and network-supported [29] congestion control for more effi-
2

Distance (km)
Voltage (pu).99.96.94
1
1.5
2.5
PV Power
Wind PowerNuclear Power
Power Plant
Substation
Transmission
Distribution Network
Data Source
Data Source
Data Source
Data SourceInternet Cloud
Gateway
EV CHARGING NETWORK INTERNET NETWORK
Download Speed (Mbps)
Cable Distance (km)
1
2
3
30 17 7
Metropolitan Area Network
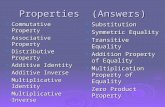
Figure 1.1: Analogy between EV charging over the distribution grid and the downloadsover the Internet.
ciency and regulated fair usage of the network capacity, most of them stayed at network
edges with limited deployments unable to span multiple providers. Decentralized designs
with smart endpoints and local/E2E measurements have been the most successful in pen-
etrating into practice and solving the congestion (or data traffic rate) control problem at
large scales. To that end, the Additive Increase and Multiplicative Decrease (AIMD) al-
gorithm [10] was proposed as a congestion avoidance solution at the end points. This solu-
tion has been proven to be stable and maintain proportional fairness among agents [33]. A
lot of work has been done regarding the AIMD’s modeling, operational mechanism, stabil-
ity, fairness, and different variations [3, 13, 25, 46].
Apart from the congestion problem itself, the Internet and the EV charging net-
work also have lots of other similarities. These are power vs. data, power congestion vs.
network congestion, cost of charging power vs. cost of data transfer, charging rate vs.
3

download rate, and voltage drop vs. packet loss. A one-to-one analogy between the two
is demonstrated in Figure 1.1. Considering the Internet’s inspiring success story and all
these similarities between the two systems, it is very motivating to adapt the Internet’s
proven techniques for EV charging by taking account of the power grid’s own dynamics
and structure. However, this adaptation also has some challenges due to the core differ-
ences between the two networks. This further requires in-depth analysis of the power sys-
tem to discover the potential system parameters that may link both systems and enable
such an adaptation. In this regard, the main objectives and contributions of this thesis can
be summarized as follows:
• An analytical analysis demonstrating a solid proof of the AIMD algorithm’s stability
and convergence and the roles and importance of its parameters are presented.
• Development of AIMD-based, fully-decentralized EV charging algorithm is presented.
• Description of the modeling and operation of a distribution power system are pre-
sented, and relationships among voltage, power, and distance in a simplified distribu-
tion grid are derived.
• A more realistic distribution test grid environment in MATLAB Simulink based on
the IEEE’s 37-bus test feeder model is developed.
• A statistical analysis that verifies the derived relationship between voltage and dis-
tance in a more realistic grid model is presented.
• Decentralized congestion detection methods are proposed.
• The performance of the algorithms in terms of the grid congestion objectives, voltage
violation, and fairness are evaluated through simulations.
The results of this study can provide crucial inputs for on-board residential and
off-board DC fast charging operation control with the potential to be scaled to mass de-
ployment of these infrastructure.
4

CHAPTER 2
LITERATURE REVIEW
There are two main overarching approaches used in EV charging control based on
the location where the charging power decision is made: centralized and decentralized.
Centralized solutions use a top-to-bottom approach in which they compute all charging
powers at a single location and send it to all end-nodes. Conversely, with the decentral-
ized approach, all the end nodes decide their own charging power at their physical lo-
cation. These control architectures are illustrated in Figure 2.1. Decentralized solutions
also differ in architecture based on the type of information they are using. A decentral-
ized controller might be using only its local information such as voltage or frequency that
can be measured at the end-node when it is making its own charging decision. This type
of architecture is often regarded as ’fully decentralized’ in literature. However, this con-
troller might need some more information to make better decisions. In that case it can
communicate with other nearby controllers and request their local measurements if this is
possible. This would surely require some level of connectivity between the end-node con-
trollers to make information exchange possible. This solution is still decentralized since
the end-node makes its own decision still by itself, but this time it uses not only its own
measurements (local info) but also others’ measurements (global info) for the final deci-
sion. This architecture is relatively less decentralized compared to the fully decentralized
one defined above. This suggests that there is a degree of decentralization among decen-
tralized solutions, and it varies based on the amount of information of each type (local and
global). This relationship can be shown as in Figure 2.2. As we go to the right, the end-
5

Centralized DecentralizedData link charging power command/decision information data
Figure 2.1: Centralized and decentralized control architectures used in EV charging prob-lem.
nodes become less connected, and thus more dependent on the local information, which
makes them more decentralized. Conversely, as we go to the left, the end-nodes get more
connected and start exchanging their information globally. This way, their dependency on
local information decreases and they become less decentralized.
Centralized solutions compute individual charging power of each EV by solving an
optimization problem and using power flow analysis in a decision center. This approach
needs a bidirectional communication link between the center and the EV to send charg-
ing power commands and receive feedback signals such as battery state of charge (SOC).
Similarly, this method also requires the accurate model of the distribution grid, which may
not be available. Also, centralized solutions are more efficient in utilizing the available ca-
pacity. However, cyber-security becomes a major challenge since they use private customer
information and are vulnerable to cyber-attacks. Centralized methods ensure stability as
they have a global control of all system variables but a possible collapse of one or multiple
communication links could lead to a cascaded failure of all the network.
Authors in [42] use a linear programming technique to maximize the total EV charg-
6

Degree ofdecentralization
Data Local info
Global info
Figure 2.2: Degree of decentralization curves. The need for local or global information de-fines the degree of decentralization of the control architecture.
ing power while operating within the network limits (i.e., voltage range, thermal loading,
and maximum charging power). Smart metering technology at every node and communica-
tion links across the grid are assumed to be present. The network topology is also needed
as a pre-requisite to perform a load flow analysis to determine voltage and thermal loading
levels.
Sojoudi and Low [47] solve an optimal power flow problem to minimize the gener-
ation and charging costs while ensuring the network constraints. This centralized control
also requires the network topology to be known to perform the power flow analysis.
A centralized approach based on disconnection/reconnection of EVs is introduced
in [40]. The proposed algorithm disconnects or reconnects EVs based on measurements
at the substation level. If measured phase currents exceed the network limits, a certain
number of EVs are disconnected and vice-versa. The authors use a P-type controller to
determine the number of EVs to be disconnected/reconnected in each control cycle. Al-
though this method does not need the network topology, switching ON/OFF such high
power loads like EVs could cause large swings and thus, adversely impact the stability of
the grid.
Luo and Chan [34] propose a real-time centralized approach to minimize system
7

losses and avoid voltage limit violations. Using power-flow analysis, the algorithm pre-
calculates voltage sensitivity at each node to sense the effect of an EV at one node on
the voltage of another node. This calculation along with EV profile information (expected
arrival/departure times, SOC, etc.) and system load forecasts are then used to schedule
EV charging. The algorithm is again highly dependent on network topology and data ex-
change between agents.
Some centralized methods implement pre-scheduling or offline scheduling instead of
real-time control. Pre-scheduling is based on computing EV charging power ahead of time.
This approach uses forecasting to take account of model uncertainties such as EV arrival
and departure statistics, EV energy consumption, etc. Depending on the availability of
this data and the strictness of achieving control objectives, pre-scheduling can suffer from
either system under-utilization or extensive computation time [6]. Such a mechanism is
proposed in [45] where the authors assume that the load profiles, real-time price, number
of EVs to be connected and their initial SOCs are available as forecasting inputs. They ex-
ecute smart distribution power flow (SDPF) and decide EV charging schedules and operat-
ing decisions for transformer taps, capacitors, and switches for the next day. The authors
state that the proposed framework is not possible to implement within the existing com-
munication infrastructure in distribution feeder. In [24], charging schedules for EVs are
planned offline by fleet operators aiming to minimize the charging cost and satisfying the
driving requirements. Some studies perform both offline and real-time scheduling for EV
charging control. Restrepo, et. al. [41] proposed a three-stage control where the first stage
operates day-ahead, and the second and third stages run in real-time. This work also em-
ploys a hierarchical control structure where the first two stages are carried out by a central
controller and the third stage by distributed controllers located at medium voltage (MV)
and low voltage (LV) transformers. This approach also needs historical information of EVs
and grid topology to calculate and allocate EV power, and communication links to enable
data flow between EVs and grid operators.
8

Unlike the centralized approach, in decentralized control, every end-node makes its
own charging decision with or without the presence of global information. Connectivity
may still be required to provide this information flow across the network. However, the
availability of network data is not as crucial as in the centralized control since charging
power is eventually determined at the end-node. Therefore, decentralized algorithms are
easier to scale as the network grows, and they are more resistant to failure.
A fully-decentralized EV charging control where the decision is solely made based
on local voltage measurements is proposed in some studies [54, 55, 56, 57, 63, 65]. These
research works mainly utilize the Internet’s de-facto congestion avoidance algorithm Addi-
tive Increase and Multiplicative Decrease (AIMD) as their controller and voltage thresh-
olds for decision making. Fully decentralized solutions require implicit detection of grid
congestion due to lack of global information. Voltage thresholds are computed based on
the statistics of historical voltage data and frequently updated to comply with new grid
conditions. Local congestion detection may not be efficient in using the grid’s full capac-
ity if the overall power demand is not taken into consideration. In [21], the authors re-
veal the strong correlation between grid voltage and demand power, and propose an au-
tonomous plug-and-play controller to control household loads in accordance with the grid
power demand. Similarly, [60] presents an analysis demonstrating the voltage-demand re-
lationship in low-voltage (LV) distribution grid, and discusses how this relationship can
be leveraged for distributed load management. The voltage-demand relationship is further
exploited and extended to EV charging control as decentralized solutions with local mea-
surements [61, 62]. In [53], the charging impact of EVs on local voltage was investigated.
Voltage droop control is also often appealed as a decentralized solution in the distribution
grid (particularly for PV integration) as a voltage stabilizing tool. [23] applies this idea
to EV charging control with different droop models and discusses the result in terms of
charging duration, grid losses, and grid voltage. A comparison study between local and
centralized charging strategies for EV charging is presented in [42]. The authors conclude
9

that the local method allows for a larger EV penetration but is not as capable of main-
taining network parameters within their limits. The local method also uses pre-calculated
network sensitivities, which requires the network topology.
As algorithms need and use more global information, the control structure becomes
less decentralized. Ardakanian, et. al. [7] presented a discussion on the structure for real-
time distributed congestion control for EV charging. It explains the definition of grid con-
gestion, the infrastructure for sending measurement and control signals and the concept of
congestion notification, and also designates the design goals. Following this work, the au-
thors propose a distributed control where they deploy measurement, communication and
control (MMC) devices on distribution lines and transformers. The grid measurements are
communicated between MMC and EVs, and EVs decide on their charging power based on
this information by performing a dual decomposition method to solve a convex optimiza-
tion problem. Similarly, the authors in [44] assume that the transformers are equipped
with sensors and communication devices to measure the loading and send this informa-
tion to houses. Then each house performs their own actions at the appliance level on the
controllable loads (EVs, HVAC, etc.) to curtail the total demand based on the broadcast
loading information and pre-set load priority and customer preferences. Beaude, et. al. [9]
aimed to maintain voltage level despite EVs’ charging action using voltage sensitivity ma-
trix. Voltage sensitivities are calculated using power-flow equations by an aggregator and
fed back to EVs. EVs update their charging decisions to minimize a pre-defined objective
function and report this back to the aggregator. This procedure is repeated until the ob-
jective is reached. Some studies also used the AIMD algorithm where the capacity/conges-
tion event is delivered as a binary variable across the network and each EV acts upon it by
rescaling their power share[31, 49, 50, 51]. Liu et al. [32] presented a comparison study for
fair EV charging strategies such as AIMD and distributed price-feedback (DPF). Crisos-
tomi et al. [14] and Ferraro et al. [19] proposed to use AIMD for power generation and
frequency control in microgrids, respectively. A packetized energy management (PEM) is
10

proposed in [5] for thermostatically controlled loads. Loads stochastically make requests
for ON operation based on their temperature, and they are granted either a YES or NO
response by the load coordinator depending on the grid-state and load forecasting. This
ON/OFF mechanism results in the delivery of energy in energy packets.
The main focus for any decentralized solution essentially reduces to detecting grid
stress and events using local measurements. There is significant research effort regarding
this, which is worth mentioning a few herein. Such an effort is exerted in [39] where the
authors use voltage measurements to detect grid disturbance events. The idea is that these
events can be observed in the rapid increase in the standard deviation of voltage. In [16],
a voltage-sensitive load controller is proposed in which the locally measured voltages are
normalized to compensate for the effect of the load’s own power consumption on the volt-
age. The authors claim that this approach allows for fair share of the available capacity
among customers, however it cannot be used at voltage regulation nodes (i.e. on-load tap
changer (OLTC) transformers) because of the risk of positive feedback. Therefore, the ef-
fect of the voltage regulation has to be isolated, and to that end, a classification method is
introduced in [28] to identify switching events associated with OLTC transformers at MV
level. This classifier is then used on LV grid to remove the effect of OLTCs and extract the
real voltage behavior to further study the stress condition of the network.
11

CHAPTER 3
THE GENERAL AIMD ALGORITHM FOR EV CHARGING
This chapter presents the analysis of the general AIMD algorithm and an analytical
stability proof discussing the parameters and their impacts on its dynamics. Then, the
AIMD algorithm will be modified to develop a counterpart algorithm for EV charging in
the next chapter.
The AIMD is a straightforward algorithm that has two operation phases. The AI
phase takes part when there is available capacity in the system. In this phase, agents are
allowed to increase their shares linearly by a rate α > 0. In case of a congestion/capacity
event, the algorithm switches into the MD phase where agents scale down their shares by
a factor 0 < β < 1. The capacity share of an agent at time t + 1 can be formulated as
follows:
wi(t+ 1) =
wi(t) + αi if there is no congestion
wi(t)× βi if congestion occurs
(3.1)
where wi denotes the share of the agent i. However, this piece-wise formulation is not con-
venient for a dynamic analysis, and thus we need a proper mathematical model of the sys-
tem. There are many approaches studied to model the algorithm. We use the switched
system modeling approach presented in [13].
We assume that congestion events occur at discrete times, e.g., tk and tk+1. Then,
the share of agent i at time t > tk can be described by a linear rule:
wi(t) = βiwi(tk) + αi(t− tk), tk < t ≤ tk+1. (3.2)
12

To obtain a discrete-time model, we can rewrite (3.2) by noting that wi(k) denotes the ith
agent’s share at the kth capacity event. Then, our model equation becomes:
wi(k + 1) = βiwi(k) + αiD(k) (3.3)
where D(k) is the time between two successive congestion events k and k + 1 such that
D(k) = tk+1 − tk.
(3.3) represents a linear difference system. If we let wi(0) and d denote the initial
share and the average time between two congestion events, respectively, and let k tend to
a large number of n (k → n), then it yields:
wi(1) = βiwi(0) + αid
wi(2) = βi(βiwi(0) + αid) + αid
...
wi(n) = βinwi(0) + αid · (βin−1 + βi
n−2 + . . .+ βi + 1)
(3.4)
By using the geometric sum identity, we can modify (3.4) to obtain (3.5) such that:
wi(n) = βinwi(0) + αid
1− βin
1− βi(3.5)
(3.5) can be further simplified into:
wi(n) = βin(wi(0)− αid
1− βi) +
αid
1− βi(3.6)
It is easy to see that (3.6) has a transient term represented by βin × (wi(0) − αid
1−βi )
and a steady-state term governed by αid1−βi . Since βi is always between 0 and 1, βi
n term
vanishes to zero as n goes to infinity and the system converges to:
limn→∞
wi(n) = w∗i =αid
1− βi(3.7)
13

Figure 3.1: Capacity share w(n) over time with AIMD in action as n tends to infinity.
We can also see that βin provides an exponential convergence. The speed of this
convergence depends on βi and the difference between the initial and final shares wi(0) −
wi(∞). The average of the steady-state share value in (3.7) between two capacity events
is donated by w∗ and calculated as:
wi(k) =1
d
∫ tk
tk+1
wi(t)dt
w∗i = αi(1 + βi)
2(1− βi)d
(3.8)
Figure 3.1 demonstrates a typical share waveform under AIMD with constant α, β
and d parameters. This model can be further extended to include the case where the agent
does not take action at the congestion event by simply ignoring the MD phase [13]. If we
define a binary random variable Θ for the agent i such that,
Θi(k) =
1 if agent i decreases its share at event
0 otherwise
(3.9)
Then, we can rewrite (3.3) as:
wi(k + 1) = [βiΘi(k) + (1−Θi(k))]wi(k) + αiD(k) (3.10)
14

As k increases, we showed in (3.7) and (3.8) that wi(k + 1) = wi(k) = w∗i . If we use
this identity in (4.15) and take average of both sides, we obtain
w∗i = [βipi + (1− pi)]w∗i + αid
w∗i =αid
(1− βi)pi
(3.11)
where pi = 〈Θi(k)〉 is the probability that agent i decreases its share at the capacity event.
Similarly, we can apply the same logic in (3.8) to obtain (3.12) for the average steady-state
share value.
w∗i = αi(1 + βi)
2(1− βi)pid (3.12)
As can be seen by (4.16) and (3.12), the final share value are directly proportional
to α and d parameters. This means that any increase in the additive parameter will also
increase the final share. d is the average period of congestion; thus, the final share value
also tends to increase as the time between two successive congestion events gets longer.
This is reasonable since the agent will remain longer in the AI phase to increase its share
value. On the other hand, the final share has a rather quadratic relationship with β pa-
rameter since it is inversely proportional to (1 − βi). As β gets closer to one, the denom-
inator gets smaller, and the final share increases. Finally, the decision of whether or not
the agent will take action in the MD phase also largely affects the final share value. As
this probability gets smaller, the agents will mostly ignore the congestion events, and this
will naturally result in an increase in the final share as depicted in (3.12).
As equally important as avoiding the congestion is the concept of fairness. Fair-
ness defines how evenly the total capacity is being shared by the users, and can also be
numerically measured by various methods. One such method is also presented in Section
4.3.3. Any resource allocation solution is expected to establish some degree of fairness be-
sides ensuring the stable operation of the system. The average steady-state share value
expressed in (3.12) also shows another important result of AIMD in terms of fairness. For
15

the same parameters, this expression results in the same share value for each user. This
means that the resource can be allocated among the users in the fairest way if congestion
is notified to each user simultaneously, or they can truly detect it by some means on their
own at the same time (i.e. the ideal case). In a more realistic case, however, the degree of
fairness might be little different than that of the ideal case depending on how accurately
the end-nodes detect it. This would also be another challenging dimension towards devel-
oping fully-decentralized control structures.
16

CHAPTER 4
ANALOGY BETWEEN EV CHARGING AND INTERNET
This chapter will first propose an EV charging algorithm based on the AIMD al-
gorithm explained in the previous chapter. Then, it will discuss the power distribution
grid congestion concept. Furthermore, an analytical analysis is presented on how the grid
congestion can be linked to the grid voltage, and thus can be detected using local voltage
measurements. This analysis will particularly focus on the impact of the electrical distance
of an end-point relative to the substation on its voltage level. This relationship will reveal
the degree of impact of a possible congestion on the end-node location, and help us de-
velop a congestion detection method that aims to share the available capacity as fairly as
possible among users. This chapter also includes a section dedicated to building a realistic
distribution power grid test system with extensive load and EV modeling for simulation
case studies to be presented in the next chapter. Finally, this chapter will conclude by pre-
senting two congestion detection methods based on the presented analysis.
4.1 Why AIMD for EV Charging?
The AIMD algorithm is essentially a non-linear closed-loop control system whose
feedback is binary congestion information. Therefore, it is important to show that the
closed-loop system is actually a stable system whose output has always a bounded value
for a bounded input. The presented analysis in Chapter 3 showed that the individual aver-
age share of each user exponentially converges to a steady-stage value calculated by (3.8)
regardless of the controlled system. This is also one of the main advantages of using AIMD
17

for EV charging since it does not distinguish whether the system is a computer network
or an electrical circuit, but still guarantees the stability as long as the congestion informa-
tion is provided/extracted. This would not be the case with other classical and linear type
controllers since the stability analysis would require the accurate model of the controlled
system for tuning, which is highly dynamic, complex, and not even possible to get for a
distribution grid. Consequently, the AIMD algorithm saves us from worrying about the
complexity of the system, and ensures a stable operation for any system when accurately
implemented.
4.2 An EV Charging Control Algorithm Based on AIMD
In the EV charging problem, the control variable that corresponds to the user share
in the AIMD model (3.1) is the charging current. However, the real problem arises when
adapting the congestion event and time scale in which the algorithm operates. In the In-
ternet case, the congestion detection is done by measurements at every round trip time
(RTT), which is the time it takes between sending the data packets and receiving their
acknowledgments (ACK). The desired operation region, termed as “knee”, defines the set
of points on the throughput versus rate curve (Figure 4.1) right before the roll-off where
the capacity is reached and congestion collapse occurs (capacity event). A congestion in
the network increases the packet queues at routers and thus results in longer RTTs. This
clearly shows a correlation between RTTs and the congestion level. Therefore, the Inter-
net’s TCP/IP protocol [4] uses RTT to autonomously detect the congestion by comparing
it with a time-out value. This value is called the re-transmission timeout (RTO), and it is
calculated on-the-fly by using the statistics of the measured RTTs.
Inspired by the Internet’s congestion detection mechanism, we can use the node
voltage in a similar manner in the EV charging problem to deduce a possible congestion
in the grid. Studies in the literature strongly suggest that the node voltage carries signif-
icant information regarding the grid’s power demand, and thus can be utilized as a local
18

Figure 4.1: TCP’s congestion control management: As end users keep increasing theirsending rate, throughput first increases, but then saturates and sharply reduces.
means in control strategies [22, 61, 63]. This is a reasonable deduction since the grid volt-
age varies over time with the overall power demand, and severe voltage drops occur in the
distribution system when the grid is heavily loaded. However, an important difference be-
tween the Internet and power network should be noted. Most of the time, longer RTTs
and packet drops on the Internet do really correspond to a capacity congestion event on
a given data network. But, we cannot say the same for the power network. Lower volt-
age levels and drops only signify that the grid is loaded more than it was before. In other
words, voltages do not drop only when the capacity is reached but whenever the network
is more loaded. This makes it difficult to detect the true congestion of the grid at each
node just by local measurements. Therefore, in this study, we use a ‘fictitious’ congestion
by which we mean locally perceived congestion that is detected based on node voltages.
After having presented a structure for the algorithm, we will now clarify how we
calculate a voltage threshold (Vth) value using the local voltage statistics. In the follow-
ing section, we will discuss some implicit ways of calculating voltage threshold values, and
their underlying principles.
19

Algorithm 1 AIMD algorithm for EV charging network
Input: Time: tInput: Previous charging current: Ic(t)Input: Node voltage: V (t)Input: State of charge (SOC): SOC(t)Output: New charging current: Ic(t+ 1)Parameter: Additive increase parameter: α > 0Parameter: Multiplicative decrease parameter: 0 < β < 1Parameter: Decision probability: pParameter: Algorithm operation period: TaVariable: Voltage threshold: Vth1: while SOC(t) < 100 do2: if mod(t, Ta) = 0 then3: if V (t) > Vth and V (t) > Vmin then4: Ic(t+ 1)← Ic(t) + α5: else6: if p ≥ rand(1) then7: Ic(t+ 1)← βIc(t)8: end if9: end if10: end if11: end while
4.3 Distribution Grid Congestion Detection Using Local Voltage Measure-
ments
This section will first briefly cover the power grid operation and then present a sim-
plified grid model to do a mathematical analysis to extract a relationship between the grid
end-node voltage and node’s electrical distance from the substation. This relationship will
then be discussed and evaluated to understand how it affects the choice of the voltage
threshold (Vth), and thus charging fairness overall. Finally, a more realistic distribution
grid model with extensive modeling of EV and household loads will be presented along to
be used later in simulations.
4.3.1 Power Distribution Grid Operation and Modeling
EV charging takes place at the distribution level of the power system. Therefore,
it is important to briefly describe how power system at the distribution level operates
20

Primary Distribution
SecondaryDistribution
Substation
Loads
Figure 4.2: An example of a radial distribution grid.
and how it can be modeled for simulation studies. The electricity is generated at a power
plant, and the voltage is stepped up to a value around a few hundreds of kilo-volts. It is
transmitted over a long distance to where it is going to be finally consumed. Close to its
final destination, the voltage is stepped down at a distribution substation to around tens
of kilo-volts. From the substation the distribution grid branches out downstream in dif-
ferent ways and shapes much like the branches of a tree coming out of its stem. This part
of the distribution system is called the primary distribution (network) and its voltage is
still in the range of kilo-volts. The electricity travels on the distribution grid through the
primary network, and at certain points it branches again this time perpendicular to the
extension of the primary network. This part of the distribution network is called the sec-
ondary distribution (network). On the secondary network, the voltage is stepped down one
more time to the service level at pole or ground-mounted transformers, and the electric-
21

ity is distributed to the customers of different types (i.e. commercial, residential etc.). An
example of a radial distribution grid with its substation, and primary and secondary net-
works is illustrated in Figure 4.2. Note that there are also distribution transformers lo-
cated on the secondary network which are omitted in this figure.
For traditional grids where the electricity is generated and distributed from one
point, a distribution network can be thought of as an electrical circuit consisting of a sin-
gle voltage source modeling the substation, series impedances modeling the primary and
secondary distribution lines, and parallel current sources modeling the active loads. This
idea will also be a basis for our initial simplified grid model to carry out some important
analysis to understand the grid structure (topology) and its effects on the grid state vari-
ables (i.e. node voltages). Another important point necessary for accurately simulating a
distribution grid is the load modeling. Loads can be modelled as impedances (or pure re-
sistances) that draw constant power associated with their impedance value and voltage.
However, this type of modeling cannot not represent temporal dynamics of the grid, but
rather give a static solution for an average demand profile. Therefore, the demand profile
of the grid for each consumption end-point need to be defined separately as a function of
time. This can only be achieved by modeling the loads as controlled current sources whose
current value is calculated based on the time dependent power profile. In Section 4.3.5, a
more realistic distribution grid will be developed based on the modeling approaches men-
tioned above.
4.3.2 Voltage vs. Distance Relationship
The voltage threshold value Vth(t) in Algorithm 1 is the most crucial to the algo-
rithm as it serves as a congestion indicator. However, voltage level at a certain point on
the grid may vary depending on the grid structure (topology), distribution line lengths,
and the overall system load at any time. Choosing wrong threshold may cause the viola-
tion of fairness among customers as well as ineffective utilization of power. Understanding
the relationship among these system parameters and developing insight on how to choose
22

voltage thresholds are essential to ensure fair and effective operation of the AIMD algo-
rithm.
We use a single mainline type of distribution system, simplified by considering an
IEEE 37-node test feeder [35]. The model is further simplified into a DC circuit (due to
resistive behavior of the distribution system) as shown in Figure 4.3. Distribution lines are
modeled as resistors, and loads are modeled as controlled current sources. The parameters
are as follows:
• V1, V2, V3..., Vn are the main feeder voltages.
• Vi1, Vi2, Vi3..., Vik are the ith lateral feeder voltages.
• R1, R2, R3..., Rn are distribution lines of the main feeder.
• Ri1, Ri2, Ri3..., Rik are distribution lines of the ith lateral feeder.
• Ii1, Ii2, Ii3..., Iik are the currents drawn from the ith lateral feeder.
This grid model can be considered as a nested system that repeats itself. The re-
peated pattern is shown in Figure 4.4. To solve this repeated system for node voltages,
each node voltage is expressed in terms of other system variables such that ith node volt-
age can be written as:
V1 = V0 −R1(I1 + · · ·+ In)
V2 = V0 −R1(I1 + · · ·+ In)−R2(I2 + · · ·+ In)
...
Vi = V0 −R1
n∑j=1
Ij − · · · −Ri
n∑j=i
Ij
Vi = V0 − [R1 · · ·Ri]
∑n
j=1 Ij...∑nj=i Ij
= V0 −RI
(4.1)
23

R11
I11 I13 I1k
GND
R12 R13 R1k
V11
DC
R21
I21 I22 I23 I2k
R22 R23 R2k
Rn1
In1 In2 In3 Ink
Rn2 Rn3 Rnk
R1
Rn
R2
V12 V13 V1k
V2kV23V22V21
Vn1 Vn2 Vn3 Vnk
EV1 EV2 EVs
V1
V2
Vn
Figure 4.3: Simplified radial distribution grid model.
where n is the total number of nodes, R = [R1 · · ·Ri] and I = [∑n
j=1 Ij · · ·∑n
j=i Ij]T .
As seen in (4.1), the voltage of any node in the grid is determined by the distribu-
tion line parameters and all the currents drawn at all nodes at any time. This results in a
complicated system without a simple analytic equation. However, one can formulate volt-
age vs. distance relationship when the following assumptions hold true:
• All currents are the same I1=I2= I3=· · ·=In=I
• All distribution line segment parameters are the same s.t.: R1=R2= · · · = Rn=ρL/A.
R1
I1 I3 In
GND
R2 R3 Rn
V1
Vo
V2 V3 Vn
I2
Figure 4.4: Repeated pattern in the distribution system model.
24

Figure 4.5: Relationship between voltage and distance.
where ρ is line resistivity (Ω ·m), L is line segment length (m), A is line cross-sectional
area (m2) of the wire. Voltage can, then, be expressed as a function of distance for ith
node:
V (D) = V0 −Iρ
A(n+
1
2)D +
Iρ
A
D2
2L(4.2)
where D = Li (i being any node number). Only with the presented assumptions, it was
possible to simplify (4.1) into a quadratic function of a single variable (electrical distance)
as presented in (4.2). The result is shown in Figure 4.5. This curve shows that even when
simplified, the relationship between voltage and distance is not linear due to the topol-
ogy of the grid. However, (4.2) helps us to understand how the voltage signature changes
throughout the network when a voltage-based controller is to be used such as an AIMD
algorithm.
4.3.3 Ideal Maximally Fair Charging
One important objective of any charging control is to establish some degree of fair-
ness among users. This means that the coordination of charging should be done in such
a way that everybody will benefit the grid as equally as possible under the same circum-
stances (i.e. time of the day, loading level, etc.). Ideally, we can measure the fairness among
n customers using the Jain’s fairness index presented in (4.3), where w = w1, w2, · · · , wn
25

is the vector of user shares.
F (w) = F (w1, w2, · · · , wn) =(∑wi)
2
n ·∑w2i
(4.3)
The same fairness measure is also mentioned and used in [10]. In the fairest case where ev-
eryone has the same exact share, the fairness score becomes one whereas in the worst case,
the score approaches 1/n, where n is the total number of users. In EV charging, fairness
can be evaluated based on the average charging powers since it directly determines how
long the charging will take. To allocate the maximum amount of charging power equally
and fairly to each EV while making sure that every end-node operates above the minimum
allowed voltage level is basically an optimization problem that can be formulated as fol-
lows;
maxPi
n∑i=1
Pi
s.t. F (P) =(∑Pi)
2
n ·∑P 2i
= 1
V1, V2, ..., Vn ≥ Vmin
(4.4)
where Pi is the average charging power of node i, P = P1, ..., Pn is the vector of aver-
age charging powers, F (P) is the fairness index, and Vmin is the minimum allowed voltage
level. This optimization problem can be quite difficult to solve since the charging power
and voltages are all coupled to one another through the grid model and topology, which
is often impossible to get. However, if solved, it will ensure the maximum charging power
as well as the maximum fairness. The end-voltages V = V1, ..., Vn resulted from the op-
timization would be different for each end-node, and they can be technically used as Vth
since the violation of voltage constraint (V1, V2, ..., Vn ≥ Vmin) can be regarded as grid
congestion. With certain assumptions on the simplified grid in Figure 4.4, we can ease the
problem to find a solution for voltages that would fairly maximize the charging power of
EVs if used as threshold values Vth in Algorithm 1. This requires the derivation of node
26

power Pi in terms of the system variables such as substation voltage, line resistances, and
node currents.
After understanding the system voltage dynamics in Figure 4.4 using (4.1), we can
calculate the active power Pi absorbed by the ith node as:
Pi = ViIi = (V0 −RI) · Ii = V0Ii − [R1 · · ·Ri]
∑n
j=1 Ij...∑nj=i Ij
Ii (4.5)
To dedicate the same amount of power P to each node (i.e., to maximize fairness),
one has to solve this non-linear system of equations for a specific set of currents. This op-
eration inherently needs a significant computational power and takes a lot of time to com-
plete for large n. A decent and rational simplification can be made by assuming an aver-
age current in each power equation which is the same as the corresponding node current.
This assumption greatly simplifies the problem, significantly decreases the computation
time and holds well enough as long as current values, thus node voltages, are close to one
another. This is a safe approximation since, in a typical distribution system, voltages do
not deviate so much from its nominal value. This leads to an independent second order
equation of single variable for Pi:
Pi = V0Ii − [R1 · · ·Ri]
∑n
j=1 1
...∑nj=i 1
I2i
= V0Ii − [R1 · · ·Ri]
n
...
(n− i) + 1
I2i= V0Ii − I2i
nR1 + (n− 1)R2 + · · ·+ (n− i+ 1)Ri
(4.6)
27

Let Ai be the ith element of the vector A, which is the product of the following two
matrices:
A =
n 0 0 · · · 0
n n− 1 0 · · · 0
......
.... . .
...
n n− 1 n− 2 · · · 1
nxn
×
R1
R2
...
Rn
nx1
(4.7)
Then, the power for the ith node (4.6) can rewritten as:
Pi = V0Ii − I2i Ai (4.8)
For a specific power Pi = P , we obtain a simple second order equation that we need
to solve for the ith current:
−I2i Ai + V0Ii − P = 0 (4.9)
For (4.9) to have real roots, the following must hold:
Ai ≤V 20
4P(4.10)
As P increases in (4.10), the right hand side decreases and it gets more likely that
the inequality breaks down. Therefore, P has to be restricted. The maximum possible P is
determined by the minimum allowable threshold voltage Vth at the last node. From (4.1),
the current that results in this threshold voltage can approximately be found by again as-
suming an average current that is the same as the corresponding node current:
In =V0 − VthAn
(4.11)
Then, P is calculated as:
P = In · Vth (4.12)
28

(a) (b)
Figure 4.6: Main feeder voltage and currents (a) and power (b) wrt. distance.
and substituted into (4.9) to solve for current Ii required at each node to distribute the
same power P . If these currents are used to solve the system in Figure 4.4, then the volt-
ages, currents and power consumed by each node for a 15-node system will be as in Fig-
ure 4.6. When this solution is expanded for the nested system described in Figure 4.3, the
lateral feeder voltages and end-node voltages along with the associated powers will be as
in Figure 4.7 and Figure 4.8, respectively. As shown in Figures 4.6b, 4.7b, and 4.8b, the
same amount of power can be allocated to each node regardless of the distance by adjust-
ing the currents. We can conclude that the node voltages resulted from these currents can
be used as the voltage thresholds for our AIMD algorithm to maximize fairness between
EVs.
To test the ability of the proposed method to determine the voltage thresholds in
the AIMD algorithm, we run a simulation case study. The simulation is conducted for the
grid model in Figure 4.3 with the following parameters:
• Number of main feeder nodes = 15
• Number of lateral feeder nodes = 4× 15 = 60
• Number of end nodes/customers = 4× 60 = 240
Each lateral node has four inner end-nodes which simulates four houses connected
29

(a) (b)
Figure 4.7: (a) Lateral voltage and currents (a) and power (b) wrt. distance.
(a) (b)
Figure 4.8: (a) End-node voltage and currents (a) and power (b) wrt. distance.
to a common pole transformer in a neighborhood. EV model types, battery SOCs, arrival
and departure times, and household load consumption are chosen to be the same to clearly
see the effects of the distance and how much the proposed method compensates for it to
result in a fair sharing of power.
The voltage results for four nodes at increasing distances and power results for all
distances are obtained for the following cases.
• Case 1: Charging without any control
• Case 2: AIMD control with fixed Vth
30

(a) (b)
Figure 4.9: Case 1 (no control): Voltages (a) and charging powers (b)
(a) (b)
Figure 4.10: Case 2 (least fair): Voltages (a) and charging powers (b)
• Case 3: AIMD control with distance-dependant Vth using home and EV loads
• Case 4: AIMD control with distance-dependant Vth using only EV loads
In Case 1, all the EVs are charged with the maximum possible power, which is the
same to all, causing significant voltage drops that increase with the distance to the substa-
tion as shown in Figures 4.9a - 4.9b. In Case 2, the AIMD algorithm with a fixed voltage
threshold is implemented at all nodes and this causes an unfair share of the total charging
power which decays with the distance as shown in Figures 4.10a - 4.10b. In Case 3, dis-
tance depended voltage thresholds result in a fairer allocation of power, and thus, equal
31

(a) (b)
Figure 4.11: Case 3 (AIMD): Voltages (a) and charging powers (b)
(a) (b)
Figure 4.12: Case 4 (AIMD w/o household loads): Voltages (a) and charging powers (b)
charging durations all across the grid as shown in Figures 4.11a - 4.11b. Lastly in Case 4
as shown in Figures 4.12a - 4.12b, we see an improvement in the fair share of the charg-
ing powers when the household loads are eliminated during the charging time. This again
shows us that any load in the system can contribute to the unpredicted nature of the grid
and violate fairness. Note that the oscillation seen in the results are not a sign for insta-
bility. Rather, as noted before, AIMD is stability-proven, and the EV chargers oscillate
dynamically around their equilibrium point.
32

4.3.4 Realistic Grid Modeling
Decentralized operation of an EV charging algorithm relies on the measured and
preset threshold voltage values. This makes it very important to understand the effects
of any system parameter on the voltage values. A detailed analysis regarding the rela-
tionships between distance vs. voltage and power in a simplified distribution grid model
was presented in Section 4.3.3. Using the results of this analysis, a method that ensures
fairness for a charging algorithm for this simplified model was proposed. This section will
present a more realistic method to learn the operating voltage range of EV on-board charger
rather than utilizing simplified assumptions. Statistical Monte-Carlo (MC) simulations of
the stochastic charging and residential loading events will be used. The effects of param-
eters like node distance to substation and EV penetration ratio to the resulting statistical
voltage distribution at local nodes are analyzed. The results provide invaluable informa-
tion to learn the status of the distribution system, and they can be used to develop control
algorithms of grid connected EV and PV power electronic systems.
4.3.5 System Modeling
Since the distribution grid is an electric circuit, its states can be estimated or at
least observed through its electrical variables such as end-node voltages. Given the fact
that the grid voltage tends to drop as the system is loaded, we can infer that the event of
voltage drop can be interpreted as a sign of congestion in the system. Also, the degree of
the congestion can be estimated depending on the amount of drop [38].
In the case of distribution grid, congestion refers to the loading level of the grid.
A main question to consider is whether the measured voltage at any node of the grid re-
flects the amount of congestion at the time of measurement. Voltage drops may occur due
to various reasons at any time, and the time it takes to recover also changes. Therefore, a
statistical methodology is needed to extract the information of whether the nearby distri-
bution grid is congested via end-node measurements. Assuming distribution grid power de-
mand doesn’t change significantly from day to day, the statistics of the measured voltage
33

records should also show a stable behavior on daily basis. This means that the mean value
of the voltage should follow a certain distribution during a day signifying an uncontested
situation. The amount of dispersion of the distribution around its mean value over a day
time will vary depending on congestion level of the grid. As an example, the typical power
consumption of a residential house tends to rise to peak value in the evening hours caus-
ing drops in voltage levels. Such insignificant power consumption of a single house doesn’t
make much difference in voltage levels but cumulative loading actions of many houses (as
in the case of EV charging) might have severe impact on the grid and will be noticed by
observing the voltage [11].
This section presents a realistic distribution simulation. The goal is to adjust the
dynamic loading of the grid at different levels through EV charging and observe its effect
on the measured node voltages through statistical analysis. System modeling is done using
MATLAB and Simulink. Each of the sub-components of the system model are described
below.
4.3.6 EV Modeling
EVs arrive at and depart from a residential charging station according to a Gaus-
sian distribution with a mean and standard deviation of (17h30, 1h00) and (07h47, 0h23),
respectively. The model generates state of charge (SOC) values for each EV at the time of
grid connection based on a Gaussian daily trip distribution with a mean and standard de-
viation of (40.0 mi, 5.0 mi). Each EV is assumed to have a 60 kWh battery pack with an
on-board charger of 7 kW corresponding to around 30 A AC rms current for a rated volt-
age of 240 V. EVs are assumed to employ constant DC charging current to charge their
batteries.
4.3.7 Distribution Grid Modeling
The primary distribution grid used in this study is based on the IEEE 37-Bus test
system shown in Figure 4.13, which is an unbalanced grid that operates at a nominal volt-
age of 4.8 kV [35]. The primary network implemented for this study in MATLAB is shown
34

4.8 kV
Secondary
Distribution
Lateral
Feeder
Prim
ary
Feed
er
Substation
Primary
Distribution
Figure 4.13: Primary and secondary distribution network implemented in the MATLABmodel.
in Figure 4.14. Each colored box in Figure 4.14 represents a neighborhood that is con-
nected to a primary feeder bus. There are a total of 26 neighborhoods in the grid powered
from different phases to ensure more balanced operation.
Each neighborhood marked as red dots in Figure 4.13 on the left is modeled as a
secondary network shown in Figure 4.13 on the right. The secondary network is developed
following a similar procedure described in [35]. It contains four inner nodes and at each
node a pole-mounted transformer of 25 kVA is located. Each transformer steps-down the
primary feeder voltage of 4.8 kV to a secondary voltage level of 120/240V and supplies
four residential houses. In total, there are 416 residential and six commercial customers
in the model. The overall distribution grid operates slightly under 2MW at peak hours
without any charging event.
4.3.8 Residential and Commercial Load Modeling
A random consumption data generator has been designed for residential homes.
This generator uses 16 days of residential power consumption data given in Figure 4.15.
The household consumption data was obtained using publicly available data from E-gauge
[1]. This data is used to create a statistical distribution of the load model for one-minute
resolution under the assumption that the data is normally distributed. The generated
power consumption probability distribution function (PDF) is then used to populate a
load profile in one-minute resolution for each house in the grid model. A sample power
consumption profile created for one house with this method can be seen in Figure 4.16.
35

Figure 4.14: MATLAB Simulink phasor model used for the analysis of the IEEE 37-Bustest system.
Each house is also assumed to operate at 0.9 power factor lagging at all times. The com-
mercial loads are located at Bus-10, 15, 20, 27, 29, 35 and each draws a peak power of
130kW. The commercial loading profile is downloaded from public Open-EI data reposi-
tory for a mid-size office building [37].
4.4 Learning EV Impact on Voltages
Understanding the impact of the loading in the distribution grid on the local volt-
ages can be a key to a fully autonomous control methodology. For this purpose, MC method
is performed to test two sets of simulations with different levels of loading.
For each simulation, we take voltage measurements at five houses located in dif-
36

Figure 4.15: 16 days (shown in different colors) of power consumption data of a household.
Figure 4.16: A sample household power consumption profile.
ferent neighborhoods. These neighborhoods are chosen such that their distances to the
substation increase from 1 to 5, i.e. 1 being the closest to the substation and 5 being the
farthest ranging from 1 km to 2.4 km. The first house is located under the neighborhood
node 26 (1.05 km) in Figure 4.14, the second house is at the 9th node (1.44 km), the third
house is at the 10th node (1.50 km), the fourth house is at the 14th node (1.87 km), and
finally the fifth house is located at the node 22nd node (2.43 km).
In each set of simulation, the EV penetration is tested at 0%, 20%, and 40% levels.
The difference between the two simulation sets is that in the first simulation set we are
looking at the voltages of five houses with no EVs whereas in the second simulation set we
37

are interested in the voltages of five houses with EVs. A simulation time interval of 4pm-
8pm is chosen since majority of EV arrivals occur in this time frame. In each MC run, res-
idential loads are independently produced from their inferred load distribution levels, and
EV arrival and departure times are randomly determined from their respective distribu-
tions. A total of independent 30 MC runs are conducted to extract important statistical
signatures.
4.4.1 Results
The MC runs generate 30 daily operations for five different houses in the grid under
two different simulation sets. The results are shown as box plots to highlight the statistical
features of all the MC runs.
Figures 4.17–4.19 show the box plots of the measured voltages of each house for a
15-minute duration (chosen between 6:00pm - 6:15pm) under the two simulation sets. Un-
der the first simulation set, where the observed houses do not have an EV, the effect of EV
penetration in the rest of the grid can be observed specifically on the tested houses. It can
be seen from Figure 4.17 that when the EV penetration is 0% in the grid, the mean of the
observed voltages decreases gradually for the houses depending on the electrical distance
of the house from the substation. It can also be observed that the deviation of voltages for
each house is comparably very small and similar to each other although it gets worse when
the distance is further away from the transformer. This result shows that the main factor
affecting the local voltage distribution is the electrical distance of the house to the sub-
station when there is no EV penetration in the system. However, the relationship is very
complex due to the radial structure (Chapter 4.3). Also, the variances of the voltages are
similar although houses are in different neighborhoods.
When the EV penetration is increased to 20% and 40% in the grid, even though
the observed houses do not have any EV connected, the observed mean voltages drop and
the voltage deviations increase for each house as shown in Figure 4.18. Although a general
trend of mean decrease and deviation increase can be observed, the effect of changing EV
38

Figure 4.17: Voltage profiles of 5 houses at 0% EV penetration valid for both simulationsets.
penetration on each house is different. If the observed houses have also plug-in EVs (sim-
ulation set 2), then the observed voltage deviations considerably increase and mean values
decrease compared to the simulation 1 as shown in Figure 4.19.
For a closer look at the voltage profile of a particular node in the simulation set 2
over the total simulation time interval, House-3 is chosen as an example. Figures 4.20a–
4.20c show the voltage plots of all the 30 MC runs of this house in the simulation set 2
throughout four hours of simulation for 0%, 20%, and 40% EV penetrations, respectively.
As can be seen, the voltage deviations are much higher in the 20% and 40% cases com-
pared to the 0% case. The voltage deviations differ not only with different EV penetra-
tions but also with time due to the changes in the grid loading. As a result, each 15-min
slot distribution statistics need to be observed and recorded for a dynamic and effective
voltage-based control structure as examplified in Figures 4.17–4.19.
4.4.2 Analysis and Discussion
The obtained results indicate several important points. First, the mean voltage lev-
els and observed voltage deviations at each house are very much dependent on both the
electrical distance of house from the substation, the radial topology of the distribution
grid, and the EV penetration level. This conclusion shows that any globally set voltage
39

(a) (b)
Figure 4.18: Voltage profiles of 5 houses with no EVs at (a) 20% and (b) 40% EV penetra-tion (simulation set-1).
control levels would not be optimal, and the voltage control levels for each house should be
determined or learned independently for a fair capacity allocation. Secondly, each house
has the capability of observing its own voltage levels and hence voltage distributions. This
produces a local observation of the grid congestion at each house. Also, the mean and de-
viation levels summarize the expected levels of voltage including the combined effect of the
whole grid and the specific house. This is very hard to analytically deduce and can only
be formulated under very strict assumptions as shown in Section 4.3. Therefore, local in-
formation learning has the potential to be used for a local voltage control mechanism that
can be used for EV integration as well as PV interconnection to the distribution grid as a
very cost-effective and practical method. While a similar effort has been recently done uti-
lizing local frequency measurements for location estimation in the distribution grid [64], we
believe voltage measurements have a good potential to extract information of grid conges-
tion.
40

(a) (b)
Figure 4.19: Voltage profiles of 5 houses with EVs at (a) 20% and (b) 40% EV penetration(simulation set-2)
4.5 Local Congestion Detection Methods
After deciding to use voltage statistics to compute a threshold value, this subsec-
tion presents two methods to compute threshold values: historical method and real-time
method.
(a) (b) (c)
Figure 4.20: Voltage profile of house-3 at 0% (a), 20% (b), and 40% EV penetration (simu-lation set-2).
41

4.5.1 Historical Threshold Calculation
In Section 4.3, we showed that the fair allocation of the available capacity among
the EVs on a distribution grid in a fully-decentralized manner (i.e. using only local volt-
ages) requires precise calculations of voltage thresholds that serve as a trigger for the AIMD
algorithm. It is necessary to solve an optimization problem to find thresholds by mini-
mizing the voltage levels subject to the grid constraints. Solving this problem could be
computationally expensive even for such a simplified and linearized DC distribution grid
presented in Section 4.3. However, the real grid structures (topologies) can be extremely
more complex and sophisticated, and it may not be even possible to simplify them. We
also showed in Section 4.4 that the voltages observed at each house depend on many fac-
tors such as distance from the substation, topology, and the grid loading level. This makes
the problem even more complicated because it might not suffice to solve the optimization
problem once, but several times depending on the grid loading dynamics.
We also observed in Chapter 4.4 that the local voltage carries the spatial (i.e. far
nodes experience lower voltages) and temporal (i.e. peak times have lower voltages) signa-
tures that can be very useful for EV integration to the distribution grid. Collecting local
voltage and analyzing its statistics can reveal these signatures, and these statistics may
be worked out to assign a distinct voltage threshold value for each end-node. The analysis
presented in Section 4.3.2 showed the voltage variation as a function of distance under cer-
tain assumptions. One assumption was that the simplified grid was a DC grid where the
distribution line segments were modelled as pure resistors. Another important assumption
was that the node currents were the same and equal to a constant value. Under these as-
sumptions, we were able to work with a static DC circuit model and obtain a quadratic
relationship between voltage and distance. This relationship only demonstrates the spa-
tial signature since there is no time dependent variable. However, realistic grid models
have more complex grid structures and cannot be easily simplified to a DC circuit. Be-
sides, the loads on a real distribution grid are usually stochastic processes that change over
42

time depending on the consumption needs, rather than simple constant currents. This nat-
urally represents the temporal signature of the grid, and it is usually not as easy to an-
alytically extract or model this kind of behaviour because of its random nature. To that
end, some powerful statistical techniques such as Monte Carlo Method can be appealed to
tackle the problem. Running the simulation model several times with different instances of
the stochastic random variables (household loads) and calculating the statistics would en-
able us to include the temporal signature into the analysis, and help us further develop a
method for threshold calculation. At this point, it can be helpful to verify the voltage vs.
distance relationship in Section 4.3.2 (Figure 4.5) on a more realistic AC grid model with
three-phase distributed line parameters and realistic consumption data. This verification
will then inspire us to use the voltage statistics for threshold calculation since they carry
spatial and temporal signatures of the grid.
4.5.1.1 Verification of Voltage vs. Distance Relationship
To verify the voltage and distance relationship presented in Chapter 4.3 through
statistical analysis, a more realistic radial distribution grid network in Figure 4.21 was
developed first. Each neighborhood model in this grid network is identical to the ones
shown in Figure 4.13. There is a total of 10 neighborhoods connected to the network in
series similar to the simplified grid model given in Figure 4.4. Monte Carlo Method is per-
formed. The realistic grid model in Figure 4.21 is simulated for a period of 30 days, and
phase voltages of the main nodes are recorded for the interval of 6:00pm-6:15pm at 20 sec
intervals, which creates a total of 1350 data samples for each node. The average of these
simulated phase voltages is then compared with the voltage values computed by (4.2), and
the results are presented in Figure 4.22.
This comparison assumes that the distribution lines are purely resistive and the
currents drawn from each neighborhood are equal on average. The distribution grid data
for this analysis is extracted from IEEE 37-Node Test Feeder [2]. Using this data set, we
43

Figure 4.21: MATLAB Simulink phasor model used for the low voltage distribution grid.
considered each line segment with R = 2.09 Ω and X = 0.77 Ω. Since R ≈ Z, ne-
glecting X in the analysis gives a negligible error. The statistical analysis developed here
considered X as well and showed that both analysis demonstrated a similar relationship
as shown in Figure 4.22. The orange curve represents the feeder voltages calculated for
each node (neighborhood connection) using the analytical expression (4.2). The blue curve
shows the average of the measured node voltages from the simulated grid over 30 days.
The boxplots of the measured voltages are also given in this Figure to show the temporal
variations. The reason that the analytically computed voltages are little higher than the
measured ones is because the presented assumptions ignore the voltage drops due to the
line inductances.
This verification analysis shows us two important results. First, the spatial signa-
ture does exist, and the voltage follows a quadratic curve as a function of the distance on
44

Figure 4.22: Comparison between measured and analytically obtained main node voltages.
a more realistic radial grid. Second, the temporal variations (signatures) can be captured
by collecting measurements. This way, the stochastic nature of the uncertainties can be
modeled through the statistics of voltage. Now, we can develop a heuristic way to calcu-
late voltage threshold values for Algorithm 1.
4.5.1.2 Using Quantile for Threshold Calculation
In the previous section, we showed that the voltage data contains both spatial and
temporal signatures. This intuitively suggest that the threshold value extracted from the
voltage data will also contain the same signatures. The mean of the voltage distribution
represents the general tendency of the voltage whereas the variance means how much the
node voltage is effected by the load changes in the grid. However, the threshold value
should not represent the general behaviour but rather is an exceptional occasion corre-
sponding to the network congestion. This means that the threshold value should be com-
puted below the mean value creating some margin to allow little voltage variations due
to load switching. Therefore, we can use quantiles to compute the voltage threshold since
45

Figure 4.23: Calculating voltage threshold using voltage distribution.
they enable us to choose the size of this voltage margin. We can define the following func-
tion (4.13) to calculate δ quantile of a set of voltage measurements V = V1, V2, ..., Vm as
the voltage threshold Vth.
Vth = quantile(V, δ) (4.13)
The grid is a very dynamic and complex structure and therefore its temporal signa-
tures significantly change during the day. To make the algorithm more adaptive to these
changing grid conditions, a different threshold value should be used for different times
of the day. This can be achieved by diving the day into intervals of the same length and
calculating a threshold value for each. The length of these intervals is another degree of
freedom, and it is chosen to be 15-min in this study. After collecting the voltage data and
obtaining the data distribution for different time intervals, we can set the voltage thresh-
old (Vth) to the value which corresponds to a certain quantile (δ) of the distribution as de-
picted in Figure 4.23 and given in (4.13). The reason that this method is called ’Historical
Method’ is that we need the previously measured voltage data in hand to compute the
thresholds. The longer the data is collected, the better its statistics represent the grid’s
behaviour. This also makes it necessary to decide how long the data should be recorded to
compute new thresholds and update the old ones. This is again another degree of freedom
for tuning the algorithm, and also mostly depends on the grid dynamics.
46

4.5.2 Real-time Threshold Calculation
Although the grid’s physical structure (i.e. topology) and its load profile does not
significantly change in a short time, there are still benefits of making the algorithm more
responsive to dynamical changes. This can be achieved by updating the threshold values
on the fly in the run time again using the locally measured voltages. This way it also has
more resemblance to the Internet implementation of AIMD. It allows us to better imi-
tate the technique employed in the Internet’s TCP/IP protocol to continuously compute
a timeout value for re-transmission of packets. This can be regarded as a real-time thresh-
old learning since the algorithm does not have to wait days to update the threshold, but it
rather updates it on the minute scale. One main advantage of the online threshold estima-
tion is its low memory requirements since the voltage data is now being processed simul-
taneously. Another advantage would be the faster response time. Sudden increase in the
penetration level of EVs in a short time (i.e. a week) may not be a realistic case; however,
some dramatic changes in the loading level of the grid might occur at a specific time of
the day due to an overlapping consumption. One such case, for example, can be the time
when the super bowl is aired where most people stay at home, watch TV and cook almost
at the same time. This overlapping consumption would greatly impact the voltages and
needs to be taken into account by any EV charging controller. With the historical thresh-
old calculation, this is not possible since it learns a new threshold over a very long time.
However, a real-time learning mechanism would be able to respond more quickly since it
learns on the fly.
Eq. (3.7) in Chapter 3 shows us that the final share of an agent depends on the
algorithm parameters α, β, and the period of the congestion detection d. If the parame-
ters are set to be the same across the network, and each agent is notified of the congestion
simultaneously (i.e., centralized control), then this equation guarantees that every agent
will get the same share from the network, establishing an ideal fairness. For a fully au-
tonomous control, however, congestion has to be detected by each agent using local infor-
47

mation. In the Internet, this is done by measurements at every round trip time (RTT).
When data packets sent from one end-point arrive at their destination, an acknowledge-
ment (ack) is sent back to inform the sender of its packet delivery. Thus, RTT is the time
it takes between sending the packets and receiving the ack.
A congestion in the network increases the packet queues at routers and thus results
in longer RTTs. This clearly shows a correlation between RTTs and the congestion level.
Therefore the Internet’s TCP/IP protocol uses RTT to autonomously detect the conges-
tion by comparing it with a timeout value. This value is called the re-transmission timeout
(RTO), and it is calculated on-the-fly by using the statistics of the measured RTTs. Some
agents might detect the congestion more often than others depending on their closeness
to the congestion’s location. This naturally results in the average time d, and thus w∗i , to
be slightly different from one agent to another and creates a proportional fairness among
agents. The agents whose packets are traversing longer paths (i.e., using more link capac-
ity in total) get penalized accordingly and converge to a lower ω∗i .
Similar to RTO in the Internet, the key parameter, voltage threshold Vth in EV
charging also has to be locally calculated for each agent by means of voltage measurement
statistics. In essence, Vth can be calculated as an outlier of the estimated average voltage
value based on Chebyshev’s outlier estimation [59]. Chebyshev’s inequality states for any
random variable X with mean µ and variance σ2 (Figure 4.24) that
P (X /∈ |µ± kσ|) ≤ 1
k2(4.14)
This means that 100 × (1 − 1k2
)% of the measured X values are to be between µ −
kσ and µ + kσ. In TCP congestion control, the recommended value for k is 4. For our
study, we also chose k to be 4, which means that around 93% of the time the true average
of voltage must be within the measured voltages. Then, the 7% should correspond to the
outlier, which can be used as Vth as follows:
48

Figure 4.24: Chebyshev’s inequality for outlier estimation.
Vth(t+ 1) = V (t+ 1)− 4 · V (t+ 1) (4.15)
where V (t + 1) and V (t + 1) correspond to the mean and standard deviation of the mea-
sured voltage. Using exponentially weighted moving average (EWMA), we estimate V and
V values, then:
V (t+ 1) = λ · V (t) + (1− λ) · V (t)
V (t+ 1) = ε · |V (t)− V (t)|+ (1− ε) · V (t)
(4.16)
where λ and ε are the coefficients that determine the contribution of the recent measure-
ments to the average values and thereby, the response time of the system. For this study,
we chose α = 1, β = 0.5, λ = 0.7, and ε = 0.2. While α and β are the default values in
TCP congestion control, we chose the latter two parameters driven by TCP as well.
49

CHAPTER 5
SIMULATION STUDY FOR AIMD ON EV CHARGING CONTROL
In Section 4.3, two methods to calculate the voltage thresholds from the locally col-
lected voltage data were introduced. These are historical and real-time threshold calcula-
tion methods. This chapter will present simulation case studies for each method to evalu-
ate their effectiveness and performance.
5.1 AIMD with Historical Threshold Calculation
To test the historical approach for calculating voltage thresholds, a baseline sce-
nario is developed first. This will show whether the statistically learned threshold voltages
can result in fair average charging power among customers regardless of their location in
the grid. Initially, it is assumed that only 16 households in Figure 4.21 (10% penetration)
have EVs. The EV and household power consumption models are directly adapted from
the simulation model presented in Section 4.3.5. For 100 days of simulation, the EVs are
charged at a rated fixed power of 7.2 kW, and their node voltages were recorded. The dis-
tribution of the recorded voltages of 10 selected houses from each neighborhood for the
interval 6:00pm-6:15pm is shown as box-plots in Figure 5.1 by ascending order of distance.
As it can be seen, the voltage distributions decrease as the distance of the house from the
substation increases and the downward trend is not linear but rather of a quadratic form,
which also supports Eq. 4.2.
Each voltage distribution is calculated by only the local voltage values observed at
that house. Each box in Figure 5.1 corresponds to a different house, and each house can
50

Figure 5.1: Box-plot of voltages averaged over 6:00pm-6:15pm for 10 houses after 100 daysat full charging power.
calculate its own voltage threshold without any further information from other houses.
Since the voltage profile changes over time, a different threshold value needs to be calcu-
lated for different time intervals during the day. In this study, a voltage threshold value
(Vth) for each 15-min interval is calculated by using the voltage value that corresponds to
the 25th percentile of the voltage distribution, i.e. δ = 0.25.
Later, another 100 simulations were run with the learned threshold voltages but
this time the EVs implemented Algorithm 1 (α = 1 and β = 0.5) rather than charging
at the rated power rate. To demonstrate the operation of the algorithm, Figure 5.2 shows
voltage profile, charging current, and voltage threshold waveforms over the time period
of 16:00–20:00 for a single EV. The congestion events occur when the node voltage drops
below the calculated threshold values. They are demonstrated by black circles in the fig-
ure. The current linearly increases until the node voltage becomes lower than the thresh-
old (congestion event) during when it is multiplicatively reduced. The resulting average
charging power of 16 houses (10% penetration) are shown in Figure 5.3. As shown, EVs
learned to charge at approximately 4 kW of power without needing any central charging
power command and only by using local voltage information. However, this case only im-
plemented a single learning cycle, which means that the same voltage thresholds are used
51

Table 5.1: Performance scores of historical threshold calculation
Cases Average ofPowers (kW)
Deviation ofPowers (kW)
FairnessScore (%)
10% EV w/o threshold update 3.92 0.20 99.7620% EV w/ threshold update 0.96 0.07 99.4520% EV w/ threshold update (k=1.25) 4.21 0.42 99.04
Figure 5.2: Node voltage, voltage threshold and charging current waveforms of a singlevehicle as AIMD is in action.
throughout all the simulations, and they are not updated. Table 5.1 summarizes some per-
formance scores regarding this case (10% EV w/o threshold update). We can see in this
table that the average value of all charging powers is 3.92 kW.
Fairness is another important parameter to evaluate the performance of the algo-
rithm. Table 5.1 presents two different measures of fairness. The deviation of powers gives
the standard deviation of all the average charging powers, and it basically measures the
spread of charging powers from the mean value. For the 10% EV penetration case with
no threshold update, the standard deviation comes out to be 0.2 kW. The other fairness
measure is based on the Jains fairness index formulated by (4.3) (Section 4.3.3), and it re-
sulted in a fairness score of 99.76% for this case. All these metrics show that some degree
of fairness has been established through statistically learning of voltage thresholds and us-
ing them in the AIMD algorithm.
52

Figure 5.3: Average EV charging powers at 10% penetration after the implementation ofAIMD with learned threshold values.
The problem with this approach is that as every node constantly learns their thresh-
olds and uses them in the AIMD, their average charging power gradually decreases in fa-
vor of the grid. This will create an upward trend in the measured local voltages causing
the threshold values to go even higher. This is demonstrated with a case study described
as follows. It is assumed that the first 16 EVs in the first case already know their thresh-
olds and another set of 16 EVs are integrated into the grid making the total penetration
level 20%. This scenario investigates whether a fairness will be established between the
former and latter 10% EV populations by constantly learning and updating their thresh-
olds.
The recently integrated EVs will start their learning process by charging at the
fixed rated power of 7.2 kW and will then start implementing the AIMD after the first
threshold update period, which is chosen to be one week for all EVs in this case study.
Figures 5.4 and 5.5 show the voltage distributions and average charging powers of 32 end-
nodes between 6:00pm-6:15pm after the 1st week, 3rd week, 6th week, and 10th week, re-
spectively. As seen, the voltage distributions always move upward and the variations get
always smaller causing the thresholds to eventually increase and get closer the mean volt-
age. This results in the average charging powers decreasing after every learning cycle.
53

(a) (b)
(c) (d)
Figure 5.4: Box plot representation of 32 end-node voltages between (20% penetration)6:00pm-6:15pm for (a) 1st week, (b) 3th week, (c) 6th week, and (4) 10th week.
Threshold values closer to the mean value means more frequent congestion detection, and
this means lower average power. So, in the long run, the system will always try to heal
itself by lowering the charging powers towards zero, essentially causing a slow charging
speed problem. We also see this problem in the performance scores of this case (20% EV
w/ threshold update) in Table 5.1. Although the both fairness measures (charging powers
deviation of 0.07 kW and fairness score of 99.45%) show that the charging is significantly
fair, the average of charging powers is now less than a kW (0.96 kW). This means that
the threshold calculation is successful in establishing fairness, but it works very poorly in
terms of utilizing the available capacity.
To solve this problem a threshold update method is proposed. This method is im-
plemented after every learning process is completed. It compares the newly estimated
54

(a) (b)
(c) (d)
Figure 5.5: Average charging power of EVs (20% penetration) for (a) 1st week, (b) 3th
week, (c) 6th week, and (4) 10th week.
threshold value with the previous one. If the threshold has increased, then it lowers it by a
constant voltage value, i.e. k > 0. If the threshold has dropped or stayed the same, it does
not take any action because this indicates the system has already sufficient voltage margin
to use. After learning a new threshold value Vth,new from the voltage distribution, the fi-
nal threshold value Vth,final is calculated based on (5.1) by comparing it with the previous
threshold value Vth,prev.
Vth,final =
Vth,new − k Vth,new > Vth,prev
Vth,prev otherwise
(5.1)
The vehicles will also implement (5.1) every time they learn a new threshold to
overcome the self-healing. The voltage reduction constant (k) is of significant importance
55

since it effects the average charging power of each EV. Thus, the ideal value of k for a
given system greatly depends on the available capacity and topology constraints. In this
study, k was experimentally adjusted to be 1.25 V so that the average charging power con-
verges around a moderate value for each vehicle. Also, the voltage at the farthest node
stays slightly over the critical voltage threshold.
The learning time that is needed to collect the measured data and generate the as-
sociated voltage distributions was chosen to be one week as it could generate enough data
samples for learning. In this way, the system will be able to capture changes in the grid
operation in a short time frame. The whole simulation is run for 100 weeks to evaluate
how the fairness is maintained in the long run. The voltage distributions and the average
charging power for each household in the 1st, 10th, 20th, and 30th weeks are given in Fig-
ure 5.6 and Figure 5.7, respectively. We see that the voltage variations stabilize around an
equilibrium and stop constantly decreasing as was in the case without the threshold up-
date constant k. This consequently causes the average charging powers to stabilize. The
SOC variations of all 32 vehicles (20%) over the period between 4:00pm - 12:00am are also
presented in Figure 5.8. This figure shows that all EVs manage to achieve their energy de-
mand before 12:00am.
We can see the performance scores of this case (20% EV with threshold update
(k=1.25)) in Table 5.1. Using a threshold update mechanism by introducing a reduction
constant k has resulted in the average charging powers reaching an equilibrium of 4.21 kW
(Figure 5.7) even though there is a significant increase in the EV penetration. This shows
that the latest modification with the introduction of k has made the algorithm more suc-
cessful in terms of capacity utilization compared to the other two cases. This equilibrium
point of 4.21 kW is determined by the constant voltage parameter k. A higher k value will
shift the equilibrium point upwards since it decreases the thresholds allowing the charging
currents to increase even more. Updating thresholds with the regulating k constant also
managed to establish a certain degree of fairness (charging powers deviation of 0.42 kW
56

(a) (b)
(c) (d)
Figure 5.6: Box plot representation of 32 end-node voltages (20% penetration) between6:00-6:15pm for (a) 1st week, (b) 10th week, (c) 20th week, and (d) 30th week. (w/ k regu-lation)
and fairness score of 99.04%), which is slightly less than the first two cases (Table 5.1).
Equilibrium state can also be observed from the voltage distributions in Figure 5.6.
After the 20th week, the voltage distributions converge to an equilibrium point for each
node within a tight voltage interval. This result shows that a charging operating point for
each EV can be set by adjusting a single parameter, i.e. k.
The obtained results showed that the historical voltage observations from a volt-
age distribution carry information about the congestion and can be successfully used for
extracting a threshold value for the EV charging control. It can also be inferred that the
reduction parameter k being the same at all nodes could bring some more advantages for
those nodes which are closer to the substation or experience high voltage profiles. This is
57

(a) (b)
(c) (d)
Figure 5.7: Average charging power of EVs (20% penetration) for (a) 1st week, (b) 10th
week, (c) 20th week, and (4) 30th week. (w/ k regulation)
because that it takes more power for the closer nodes to see the same amount of voltage
drop compared to the further nodes. One possible solution for this would be adjusting the
reduction parameter k in accordance with the voltage profile just like in the case of thresh-
olds. This will assign slightly higher k values to the far-end nodes relative to the closer
nodes.
The total power of the system in 1st, 10th, 20th, 30th, 40th, and 50th weeks between
4:00pm-12:00pm is plotted in Figure 5.9. This figure shows that the total power has reached
a peak value after the 20th week and stayed around this power in the following weeks.
This validates the results shown in Figure 5.7 showing that the average charging powers of
the EVs reached an equilibrium point. This settling time is dependent on how frequently
threshold values are calculated. In this study, every node updated their thresholds every
58

Figure 5.8: SOC variations of 32 vehicles (20% penetration) over the time period between4:00pm - 12:00am.
week. If we reduce this time, the system can more quickly settle around a charging power.
It is also seen in this figure that the overall charging power shifted towards the 7:00pm-
8:00pm interval as weeks pass. This naturally happens as more EVs implement the AIMD
algorithm.
Figure 5.9: Total power of the system along with the base power (no EV) in 1st, 10th, 20th,30th, 40th, and 50th, weeks between 4:00-12:00pm interval.
59

5.2 AIMD with Real-Time Threshold Calculation
For testing the real-time threshold calculation method proposed in Section 4.5.2,
the IEEE-37 bus test distribution grid introduced in Section 4.3.5 is used. The parameters
regarding the EVs, their arrival and departure times as well as the SOC levels are gener-
ated based on the procedure presented in Section 4.3.6. Similarly, the residential power
consumption is modeled the same way as in Section 4.3.8. Only the commercial consump-
tion is omitted in this case study, and the maximum EV charging power was chosen to be
9.8 kW. This time, the EVs will implement Algorithm 1 by calculating the threshold val-
ues on-the-fly in real time described as in Section 4.5.2. Three EV penetration levels (25%,
50% and 100%) were tested under AIMD. The results will be compared with the 0% and
100% penetration cases with uncontrolled charging, and some performance scores associ-
ated with these penetration levels are presented in Table 5.2.
In order to see the impact of the proposed algorithm and make a better compari-
son, we consider two extreme cases. One such a case is where there is no EV penetration
(baseline load) and the other is 100% EV penetration. All EVs are charged at full power
(9.8 kW). Figures 5.10a and 5.10b show the root mean square (rms) voltage waveforms
of all 416 households between 16:00-24:00 for 0% and 100% EV penetrations (no charg-
ing control), respectively. As shown, grid voltages considerably drop compared to the base
load case. Without a controlled charging at 100% penetration, the voltages drop even be-
low the minimum allowable voltage limit (216 V) during peak-hours (18:00-20:00).
The voltage waveforms of 416 households at 25%, 50%, and 100% EV penetrations
with AIMD control are presented in Figure 5.11a, 5.11b, and 5.12a, respectively. This fig-
ure shows that with AIMD in action, the voltages are successfully held above the critical
level at 100% EV penetration avoiding any voltage violation. The total power of the sys-
tem between 16:00-24:00 for different penetration levels along with the base load (0% EV)
is given in Figure 5.12b. This shows that the peak-load of the grid (purple) is successfully
shifted towards the off-peak hours (yellow) with fully autonomous control. The SOC vari-
60

(a) (b)
Figure 5.10: Voltage profiles of 416 households for (a) 0% and (b) 100% EV penetration.
(a) (b)
Figure 5.11: Voltage profiles under AIMD with (a) 25% and (b) 50% EV penetration.
ations of the vehicles for 100% penetration level with the AIMD control is given in Fig-
ure 5.13a. This figure shows that the EVs managed to get fully charged by midnight by
shifting the peak-load and avoiding voltage violations.
The average charging power of each EV by ascending order of distance to substa-
tion is also presented in Figure 5.13b. This figure shows that a proportional fairness has
been established around different average charging powers for different penetration lev-
els in the grid. This means the customers closer to the substation benefit higher charging
power since they experience higher voltage levels. It is also seen that the average charging
powers are slightly different at each penetration level, and they go upwards as the penetra-
tion level decreases. This result can also be shown by simply averaging the charging pow-
ers of all EVs for each penetration level as in Figure 5.14a. This is expected because the
61

(a) (b)
Figure 5.12: (a) Voltage profiles under AIMD (100% EV penetration), (b) power consump-tion of the grid.
(a) (b)
Figure 5.13: (a) SOC Levels (100% EV penetration), (b) average charging powers.
available capacity in the grid increases as the penetration level decreases, and the EVs can
benefit the higher capacity by increasing the charging power. However, we see by observ-
ing the voltages in Figure 5.11 that there is still some available capacity in the grid that
could have been used by EVs. They could have been charged even at the maximum rated
power (9.8 kw) when the penetration level is 25% since the grid could handle that much
of load as seen in Figure 5.12b. This means that the capacity is not fully utilized at lower
penetration levels, and the available capacity could be better estimated to fully take ad-
vantage of it. We can also draw the same conclusions through observing the performance
scores in Table 5.2. Average of powers increases as the penetration level decreases. This
happens due to the adaption ability of the algorithm, however, the capacity utilization
is still lower than it would be if the vehicles were charged at the full power of 9.8 kW at
62

(a) (b)
Figure 5.14: (a) Comparison of charging powers for different penetration levels, (b) samplecurrent waveform of a random EV.
Table 5.2: Performance scores of real-time threshold calculation
Penetration Average ofPowers (kW)
Deviation ofPowers (kW)
FairnessScore (%)
Utilization(%)
25% (w/ AIMD) 6.55 0.8 98.53 72.050% (w/ AIMD) 5.82 0.9 97.66 82.8100% (w/ AIMD) 4.46 1 95.67 100.0100% (no-control) 0.16 0.42 99.97 127.12
25% and 50% penetrations. This is expected since decentralized solutions are mostly not
as efficient in terms of capacity utilization. The fairness measures (deviation of power and
fairness score) also show very promising results. The worst fairness scores were obtained
at 100% EV penetration with AIMD, and even this case resulted in a deviation charging
powers of 1 kW and fairness scores of 95.67%. The reason for this being the worst case is
that the vehicles at the far ends of the distribution grid might have experienced the min-
imum critical voltage of 216 V and had to reduce their power. Finally, we can also see an
example of the rms current waveform of a randomly selected vehicle under the AIMD op-
eration in Figure 5.14b.
63

CHAPTER 6
CONCLUSION AND FUTURE WORK
6.1 Summary
Transportation electrification is expected to lead to the domination of EVs on the
roads in the future. However, the range anxiety is still a serious problem for most cus-
tomers. Thereby, EV manufactures equip their vehicles with batteries with higher ca-
pacity. This naturally results in longer charging times especially on the residential charg-
ing level. Charging for long times at high penetration EV levels, if not controlled, is very
likely to create grid congestion that might cause detrimental impacts such as voltage drops,
power losses, equipment failures, or even power outages. Upgrading the grid infrastructure
for the upcoming EV load is an option, but this will be a very costly solution. Therefore,
developing a smart control and coordination for the EV charging while taking into account
of the grid constraints is of upmost importance.
The development of the today’s Internet has a similar story in its early days. It suf-
fered from congestion collapses when the number of end-users drastically increased. Its
ever increasing structure and complexity eventually made it impossible to control it in a
centralized manner. Therefore, decentralized solutions that can work autonomously and
scale easily were developed. Among these solutions, AIMD has stood out by proving itself
to provide a stable and fair operation of the network, and it has been used as the de-facto
congestion avoidance algorithm in the Internet’s protocol ever since. AIMD is a straight-
forward algorithm that has additive increase and multiplicative decrease modes. Therefore,
64

it can be easily adopted for EV charging. Normally, it operates in the increase mode and
switches to the decrease mode when it is triggered by a congestion (or capacity event). Lo-
cal detection of the congestion is a crucial task for the decentralized operation, and the
Internet’s protocol is achieving this with local end-to-end measurements.
The trip times of data packets travelling through the Internet change depending on
the congestion level of the network and the physical distance of the destination. Therefore,
the Internet’s protocol uses the statistics of these trip times to estimate a possible con-
gestion. A similar phenomena can be observed with voltage in the distribution grid. The
end-node voltages change depending on the loading (congestion) level of the grid as well as
their distance from the substation transformer. This means that every end-node will expe-
rience a different voltage level in the case of a congestion depending on the time and their
location. This unique voltage level was defined as the threshold voltage (Vth), and it can
carry the spatial and temporal signatures of the grid with respect to a particular node.
Choosing the threshold value greatly impacts the operation of the AIMD algorithm
in terms of capacity utilization and fairness. Using the same threshold value for all end-
nodes obviously violates fairness and results in distant nodes having lower charging pow-
ers compared to the nodes closer to the substation. The analysis presented in Section 4.3
showed that the thresholds should be chosen in accordance with the voltage vs. distance
curve to maximize fairness. However, this relationship is not easy and sometimes even not
possible to obtain especially for more complex grid structures (topologies) with more com-
plicated load dynamics. To better investigate these dynamics, a more realistic grid model
based on IEEE 37-bus test feeder was developed in Section 4.3.4.
Understanding the impact of congestion on voltages due to EV penetration was a
crucial step to develop a general method for threshold calculation. The simulation analy-
sis performed in Section 4.4 on the developed realistic grid model showed that the voltage
statistics carry both spatial and temporal signatures, and thus can be used to calculate
voltage thresholds. As a result, two threshold calculation methods were proposed in Sec-
65

tion 4.5. The first method updates the thresholds every week by extracting them from
the historical voltage measurements recorded throughout the week. It basically uses the
voltage value corresponding to a predefined quantile (i.e. 25th percentile) of the voltage
distribution as the threshold value. The second method, on the other hand, implements
a real-time computation for the threshold. It calculates the threshold every minute as an
outlier of the estimated average voltage value based on the Chebyshev’s outlier estimation.
These two threshold calculation methods were tested on realistic distribution grid
models in Chapter 5. The quantile based method required an additional update mecha-
nism implemented by the voltage reduction value (k) to prevent the self-healing problem.
With this modification, the results in Section 5.1 showed that it successfully managed to
establish a proportional fairness among vehicles in terms of charging powers after a sud-
den increase in the penetration level was simulated. The real-time threshold calculation
method was implemented at different penetration levels, and its ability to adapt to chang-
ing grid conditions was tested. The results in 5.2 showed that the average charging powers
are gradually increasing as the penetration level decreases. This means that the vehicles
adapt themselves to the demand changes and start benefiting higher available capacity
by increasing their charging power. The voltage results also showed that the algorithm is
operating sub-optimally since there is still some available capacity at lower penetration
levels. Both methods successfully prevented the grid congestion by avoiding voltage viola-
tions.
6.2 Contributions
This thesis work has made several contributions to the available literature. It de-
fines the core similarities between the EV charging problem and the Internet, and as well
as the important differences challenging the problem. Motivated by the success of the In-
ternet, it investigates the counterpart dynamics of the electric distribution networks to
successfully adapt the robust mechanism of the Internet that allows the integration of mil-
66

lions of new devices every day without collapsing. To that end, this work dedicates a full
chapter for the in-depth analysis of the Internet’s core congestion avoidance algorithm,
AIMD, by deriving an analytical expression for the average user share in terms of its pa-
rameters.
The AIMD algorithm is adapted and modified for EV charging algorithm, and a de-
tailed discussion is presented on end-node voltage being a reasonable candidate that can
be used for congestion detection. The analytical and statistical analysis of the end-node
voltages based on the grid’s physical parameters (i.e. distance to substation) and temporal
characteristics (i.e. load variations) constitutes one of the main contributions of this the-
sis work. Extracting these hidden signatures from extensive local voltage measurements
plays a critical role for an Internet-like decentralized operation. This work proposes to
map these signatures to a single time-varying value referred as the voltage threshold. The
threshold analysis is further extended to show how fairness can be ideally established using
analytically derived thresholds values with AIMD.
For a more practical implementation of the AIMD algorithm, the thesis proposes
two statistical estimation methods to calculate threshold values using the locally available
voltage measurements. These methods work completely decentralized without needing any
central information, and thus any additional communication infrastructure. Finally, vari-
ous EV charging scenarios were developed on realistic grid models and simulated with the
proposed methods. The results of the simulations were discussed, the advantages of the
methods were highlighted, and the possible challenges were addressed.
6.3 Future Work
Our analysis has shown that the grid congestion (i.e. overloading of the substation
transformer and distribution feeder lines) is reflected on the end-node voltages mainly
in the form of voltage drops and variations. This is promising because fully decentral-
ized control solutions running at end-nodes do not have any means of communication to
67

get this information from a central operator. They can only measure the voltage and fre-
quency of their respective point of common coupling, and they have to rely on those mea-
surements. However, voltage drops and variations do not exactly tell how congested the
grid is, but rather indicate whether the grid is more congested or not compared to its
previous state. Therefore, any congestion detection method using only the local voltage
measurements is not fully capable of detecting the true congestion, but rather a fictitious
congestion that is mostly caused by local variations. This may lead to the inefficient use
of the available capacity, and thus lower charging power despite having more room to in-
crease it. To be able to cope with these problems, communication and measurements de-
vices have to be deployed all across the grid and the true congestion has to be measured
and detected in real-time and broadcast to all agents/EVs to notify them. However, this
would be a costly solution and make the system more vulnerable to cyber attacks. The
system would also be so dependent on communication, and thus even fail to operate when
the connectivity is lost.
Detecting the true congestion is implicitly not possible, and explicit notification of
this information requires continuous connectivity and brings in new challenges. Therefore,
a future solution will be able to use and take advantage of both local and global informa-
tion if possible to detect congestion more accurately. However, it will also aim at making
the algorithm operate as decentralized and distributed as possible by detecting the conges-
tion mainly using local information and minimizing the need for connectivity. The goal is
to bring the advantages of the available centralized and decentralized solutions together,
achieve more efficient, fair and stable utilization of the capacity, and reduce any risks and
threats that might result from information exchange and communication.
68

REFERENCES
[1] Energy monitoring systems for residential and commercial applications.http://www.egauge.net/. [Online; accessed 31-Jan-2018].
[2] IEEE PES AMPS DSAS Test Feeder Working Group. http://sites.ieee.org/pes-testfeeders/resources/. [Online; accessed 31-Jan-2018].
[3] Alhussein A. Abouzeid, Sumit Roy, and Murat Azizoglu. Stochastic modeling of TCPover lossy links. In INFOCOM, 2000.
[4] M. Allman, V. Paxson, and E. Blanton. TCP congestion control. IETF RFC 5681,September 2009.
[5] M. Almassalkhi, J. Frolik, and P. Hines. Packetized energy management: Asyn-chronous and anonymous coordination of thermostatically controlled loads. In 2017American Control Conference (ACC), pages 1431–1437, May 2017.
[6] Omid Ardakanian. On the Control of Active End-nodes in the Smart Grid. Phd the-sis, University of Waterloo, 2015.
[7] Omid Ardakanian, Catherine Rosenberg, and Srinivasan Keshav. Realtime distributedcongestion control for electrical vehicle charging. ACM SIGMETRICS Perform. Eval.Rev., 40:38–42, 12 2012.
[8] H. Balakrishnan and S. Seshan. The congestion manager. Internet Eng. Task ForceRequests for Comments 3124, June 2001.
[9] O. Beaude, Y. He, and M. Hennebel. Introducing decentralized ev charging coordi-nation for the voltage regulation. In IEEE PES ISGT Europe 2013, pages 1–5, Oct2013.
[10] D. M. Chiu and R. Jain. Analysis of the increase/decrease algorithms for congestionavoidance in computer networks. Journal of Computer Networks and ISDN Systems,17(1):1–14, June 1989.
69

[11] K. Clement-Nyns, E. Haesen, and J. Driesen. The impact of charging plug-in hy-brid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst.,25(1):371–380, Feb 2010.
[12] Michael J. Coren. Researchers have no idea when electric cars are go-ing to take over, 2019. Accessed on: Oct 30, 2019. [Online]. Available: =https://qz.com/1620614/electric-car-forecasts-are-all-over-the-map/, urldate = 2019-09-15.
[13] M. Corless, C. King, R. Shorten, and F. Wirth. AIMD Dynamics and DistributedResource Allocation. Society for Industrial and Applied Mathematics, Philadelphia,PA, 2016.
[14] E. Crisostomi, M. Liu, M. Raugi, and R. Shorten. Plug-and-play distributed algo-rithms for optimized power generation in a microgrid. IEEE Trans. Smart Grid,5(4):2145–2154, July 2014.
[15] Jesse Dean, Lars Lisell, timothy rehder, and Jal Desai. High-efficiency housing at thefort peck indian reservation: Opportunities and lessons learned, 03 2018.
[16] P. J. Douglass, R. Garcia-Valle, J. stergaard, and O. C. Tudora. Voltage-sensitive loadcontrollers for voltage regulation and increased load factor in distribution systems.IEEE Trans. Smart Grid, 5(5):2394–2401, Sep. 2014.
[17] F. Erden, M. C. Kisacikoglu, and O. H. Gurec. Examination of ev-grid integrationusing real driving and transformer loading data. In Int. Conf. Elect. Electron. Eng.,pages 364–368, 2015.
[18] L. Pieltain Fernandez, T. Gomez San Roman, R. Cossent, C. Mateo Domingo, andP. Frias. Assessment of the impact of plug-in electric vehicles on distribution net-works. IEEE Trans. Power Syst., 26(1):206–213, Feb 2011.
[19] P. Ferraro, E. Crisostomi, R. Shorten, and F. Milano. Stochastic frequency control ofgrid-connected microgrids. IEEE Trans. Power Syst., 33(5):5704–5713, Sept 2018.
[20] S. Floyd. Congestion control principles. Internet Eng. Task Force Requests for Com-ments 2914, September 2000.
70

[21] T. Ganu, J. Hazra, D. P. Seetharam, S. A. Husain, V. Arya, L. C. De Silva, R. Kun-nath, and S. Kalyanaraman. nplug: A smart plug for alleviating peak loads. In 2012Third International Conference on Future Systems: Where Energy, Computing andCommunication Meet (e-Energy), pages 1–10, May 2012.
[22] T. Ganu, D. P. Seetharam, V. Arya, J. Hazra, D. Sinha, R. Kunnath, L. C. De Silva,S. A. Husain, and S. Kalyanaraman. nplug: An autonomous peak load controller.IEEE J. Sel. Areas Commun., 31(7):1205–1218, July 2013.
[23] F. Geth, N. Leemput, J. Van Roy, J. Bscher, R. Ponnette, and J. Driesen. Voltagedroop charging of electric vehicles in a residential distribution feeder. In IEEE PESISGT Europe, pages 1–8, Oct 2012.
[24] J. Hu, S. You, M. Lind, and J. stergaard. Coordinated charging of electric vehicles forcongestion prevention in the distribution grid. IEEE Trans. Smart Grid, 5(2):703–711,March 2014.
[25] Paul Hurley, Jean-Yves Le Boudec, and Patrick Thiran. A note on the fairness ofadditive increase and multiplicative decrease. 03 1999.
[26] IEA. ”Global EV Outlook 2019”. http://www.iea.org/publications/reports/globalevoutlook2019/,2019. [Online; accessed 13-Oct-2019].
[27] V. Jacobson. Congestion avoidance and control. In Proc. Conf. Appl. Technol. Archi-tectures, Protocols for Comput. Commun., August 1988.
[28] R. Kang and M. McCulloch. Identification of electric power system stress throughfeeder voltage measurement. In IEEE Power Energy Soc. Innov. Smart Grid Technol.,Europe, pages 1–6, Oct 2014.
[29] S. Kunniyur and R. Srikant. End-to-end congestion control schemes: Utility functions,random losses and ECN marks. IEEE/ACM Trans. Netw., 11(5):689–702, 2003.
[30] Niels Leemput, Frederik Geth, Juan Van Roy, Annelies Delnooz, Jeroen Buscher, andJohan Driesen. Impact of electric vehicle on-board single-phase charging strategies ona flemish residential grid. IEEE Trans. Smart Grid, 5(4):1815–1822, 2014.
[31] M. Liu and S. McLoone. Enhanced AIMD-based decentralized residential charging ofEVs. Trans. Inst. Meas. Control, 37(7):853–867, 2015.
71

[32] M. Liu, P. McNamara, and S. McLoone. Fair charging strategies for evs connected toa low-voltage distribution network. In IEEE Power Energy Soc. Innov. Smart GridTechnol., Europe, pages 1–5, Oct 2013.
[33] S. H. Low and D. E. Lapsley. Optimization flow control – I: Basic algorithm and con-vergence. IEEE/ACM Trans. Netw., 7(6):861–875, 1999.
[34] X. Luo and K. W. Chan. Real-time scheduling of electric vehicles charging in low-voltage residential distribution systems to minimise power losses and improve voltageprofile. IET Gener. Transm. Distrib., 8(3):516–529, March 2014.
[35] A. R. Malekpour and A. Pahwa. Radial test feeder including primary and secondarydistribution network. In North American Power Symp., pages 1–9, Oct 2015.
[36] J. Nagle. Congestion control in IP/TCP internetworks. Internet Eng. Task ForceRequests for Comments 896, January 1984.
[37] OpenEI. Commercial and Residential Hourly Load Profiles for all TMY3Locations in the United States, 2013. Accessed on: Oct 30, 2019. [Online].Available:https://openei.org/doe-opendata/dataset/commercial-and-residential-hourly-load-profiles-for-all-tmy3-locations-in-the-united-states.
[38] Niamh OConnell, Qiuwei Wu, Jacob stergaard, Arne Nielsen, Seung Cha, andYi Ding. Day-ahead tariffs for the alleviation of distribution grid congestion fromelectric vehicles. Electric Power Systems Research, 92:106114, 11 2012.
[39] D. Phillips and T. Overbye. Distribution system event detection and classificationusing local voltage measurements. In 2014 Power and Energy Conf. at IL (PECI),pages 1–4, Feb 2014.
[40] J. Quirs-Torts, L. F. Ochoa, S. W. Alnaser, and T. Butler. Control of ev chargingpoints for thermal and voltage management of lv networks. In IEEE Power EnergySoc. General Meeting, pages 1–1, July 2016.
[41] M. Restrepo, C. A. Caizares, and M. Kazerani. Three-stage distribution feeder controlconsidering four-quadrant ev chargers. IEEE Trans. Smart Grid, 9(4):3736–3747, July2018.
72

[42] P. Richardson, D. Flynn, and A. Keane. Optimal charging of electric vehicles in low-voltage distribution systems. In IEEE Power Energy Soc. General Meeting, pages 1–1,July 2012.
[43] Soroush Shafiee, Mahmud Fotuhi-Firuzabad, and Mohammad Rastegar. Investigatingthe impacts of plug-in hybrid electric vehicles on power distribution systems. IEEETrans. Smart Grid, 4(3):1351–1360, 2013.
[44] S. Shao, M. Pipattanasomporn, and S. Rahman. Demand response as a load shapingtool in an intelligent grid with electric vehicles. IEEE Trans. Smart Grid, 2(4):624–631, Dec 2011.
[45] I. Sharma, C. Canizares, and K. Bhattacharya. Smart charging of PEVs penetratinginto residential distribution systems. In IEEE Power Energy Soc. General Meeting,pages 1–1, July 2015.
[46] Robert Shorten, Douglas Leith, and Peter Wellstead. An adaptive aimd congestioncontrol protocol for communication networks. In Networking 2004, pages 699–711,Berlin, Heidelberg, 2004. Springer Berlin Heidelberg.
[47] S. Sojoudi and S. H. Low. Optimal charging of plug-in hybrid electric vehicles insmart grids. In IEEE Power Energy Soc. General Meeting, pages 1–6, July 2011.
[48] Eric Sortomme, Mohammad M Hindi, SD James MacPherson, and SS Venkata. Co-ordinated charging of plug-in hybrid electric vehicles to minimize distribution systemlosses. IEEE Trans. Smart Grid, 2(1):198–205, 2011.
[49] S. Studli, R. H. Khan, R. H. Middleton, and J. Y. Khan. Performance analysis of anAIMD based EV charging algorithm over a wireless network. In Australasian Univ.Power Eng. Conf., pages 1–6, 2013.
[50] Sonja Studli, Emanuele Crisostomi, R.H. Middleton, and R.N. Shorten. A flexible dis-tributed framework for realising electric and plug-in hybrid vehicle charging policies.Int. J. Control, 85:1130–1145, August 2012.
[51] Sonja Studli, Emanuele Crisostomi, Richard Middleton, and Robert Shorten. AIMD-like algorithms for charging electric and plug-in hybrid vehicles. pages 1–8. Int. Elect.Veh. Conf., March 2012.
73

[52] O. Sundstrom and C. Binding. Flexible charging optimization for electric vehiclesconsidering distribution grid constraints. IEEE Trans. Smart Grid, 3(1):26–37, March2012.
[53] E. Ucer, M. C. Kisacikoglu, and A. C. Gurbuz. Learning EV integration impact ona low voltage distribution grid. In IEEE Power Energy Soc. General Meeting, pages1–5, Aug 2018.
[54] E. Ucer, M. C. Kisacikoglu, and M.Yuksel. Analysis of decentralized AIMD-based EVcharging control. In IEEE Power Energy Soc. General Meeting, pages 1–5, Aug 2019.
[55] E. Ucer, M. C. Kisacikoglu, and M. Yuksel. Analysis of an Internet-inspired EVcharging network in a distribution grid. In IEEE/PES Transmiss. Distr. Conf., pages1–5, April 2018.
[56] E. Ucer, M. C. Kisacikoglu, and M. Yuksel. Analysis of AIMD algorithm for EVcharging. In ACM e-Energy, 2019, accepted.
[57] E. Ucer, M. C. Kisacikoglu, M. Yuksel, and A. C. Gurbuz. An internet-inspired pro-portional fair EV charging control method. IEEE Syst. J., 2019, in press.
[58] Else Veldman and Remco A Verzijlbergh. Distribution grid impacts of smart electricvehicle charging from different perspectives. IEEE Trans. Smart Grid, 6(1):333–342,2015.
[59] Wikipedia. Chebyshev’s inequality, 2018.
[60] L. Xia, T. Alpcan, I. Mareels, M. Brazil, J. de Hoog, and D. A. Thomas. Modellingvoltage-demand relationship on power distribution grid for distributed demand man-agement. In 2015 5th Australian Control Conference (AUCC), pages 200–205, Nov2015.
[61] Lu Xia, Julian de Hoog, Tansu Alpcan, Marcus Brazil, Iven Mareels, and DoreenThomas. Electric vehicle charging: A noncooperative game using local measurements.47(3):5426–5431, 2014.
[62] Lu Xia, Julian de Hoog, Tansu Alpcan, Marcus Brazil, Doreen Anne Thomas, andIven Mareels. Local measurements and virtual pricing signals for residential demandside management. Sustainable Energy, Grids and Networks, 4:62 – 71, 2015.
74

[63] Lu Xia, I. Mareels, T. Alpcan, M. Brazil, J. de Hoog, and D. A. Thomas. A dis-tributed electric vehicle charging management algorithm using only local measure-ments. In Innovative Smart Grid Technol., pages 1–5, Feb 2014.
[64] W. Yao, J. Zhao, M. J. Till, S. You, Y. Liu, Y. Cui, and Y. Liu. Source location iden-tification of distribution-level electric network frequency signals at multiple geographicscales. IEEE Access, 5:11166–11175, 2017.
[65] Maximilian J. Zangs, Peter B E Adams, Timur Yunusov, William Holderbaum, andBen A. Potter. Distributed energy storage control for dynamic load impact mitiga-tion. Energies, 9(8), 2016.
75