
Adaptive stabilisation of networked control systems tolerant to unknown actuator failures
11
This article was downloaded by: [York University Libraries] On: 13 August 2014, At: 05:22 Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK International Journal of Systems Science Publication details, including instructions for authors and subscription information: http://www.tandfonline.com/loi/tsys20 Adaptive stabilisation of networked control systems tolerant to unknown actuator failures A.H. Tahoun a & Hua-Jing Fang a a Department of Control Science and Engineering , Huazhong University of Science and Technology , Wuhan 430074, China Published online: 30 Apr 2010. To cite this article: A.H. Tahoun & Hua-Jing Fang (2011) Adaptive stabilisation of networked control systems tolerant to unknown actuator failures, International Journal of Systems Science, 42:7, 1155-1164, DOI: 10.1080/00207720903308975 To link to this article: http://dx.doi.org/10.1080/00207720903308975 PLEASE SCROLL DOWN FOR ARTICLE Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) contained in the publications on our platform. However, Taylor & Francis, our agents, and our licensors make no representations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of the Content. Any opinions and views expressed in this publication are the opinions and views of the authors, and are not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon and should be independently verified with primary sources of information. Taylor and Francis shall not be liable for any losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoever or howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use of the Content. This article may be used for research, teaching, and private study purposes. Any substantial or systematic reproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any form to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http:// www.tandfonline.com/page/terms-and-conditions
Transcript of Adaptive stabilisation of networked control systems tolerant to unknown actuator failures

This article was downloaded by: [York University Libraries]On: 13 August 2014, At: 05:22Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of Systems SciencePublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tsys20
Adaptive stabilisation of networked control systemstolerant to unknown actuator failuresA.H. Tahoun a & Hua-Jing Fang aa Department of Control Science and Engineering , Huazhong University of Science andTechnology , Wuhan 430074, ChinaPublished online: 30 Apr 2010.
To cite this article: A.H. Tahoun & Hua-Jing Fang (2011) Adaptive stabilisation of networked control systems tolerant tounknown actuator failures, International Journal of Systems Science, 42:7, 1155-1164, DOI: 10.1080/00207720903308975
To link to this article: http://dx.doi.org/10.1080/00207720903308975
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

International Journal of Systems ScienceVol. 42, No. 7, July 2011, 1155–1164
Adaptive stabilisation of networked control systems tolerant to unknown actuator failures
A.H. Tahoun* and Hua-Jing Fang
Department of Control Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China
(Received 8 July 2008; final version received 1 September 2009)
In this article, adaptive state feedback stabilising controllers for networked adaptive control systems with unknownactuator failures are developed. The problems of networked control systems (NCSs) such as transmission delaysand data-packets dropout, induced by the insertion of data networks in the feedback adaptive control loopsare also considered. The novelty of this article consists in the combination of different aspects in NCSs: statetracking control of systems with unknown parameters, unknown actuator failures, network-induced delaysand data-packets dropout. Normalised adaptive laws are designed for updating the controller parameters.Sufficient conditions for Lyapunov stability are derived in the case of uncertainty due to actuator failures, delaysand data-packets dropout. Simulation results are given to illustrate the effectiveness of our design approach.
Keywords: Lyapunov theory-methods; networked control systems; stability; feedback control; actuator failures;delay, packet dropout; adaptive control
1. Introduction
In recent years, networked control system (NCS),system with feedback loops closed via real-time
network, has become a highly active research field.The primary advantages of an NCS are reduced systemwiring, a simpler installation and ease of systemdiagnosis and maintenance. On the other hand, factorssuch as bandwidth constraints, network-induced delaysand packet dropout, among many other peculiarities ofnetworks, often affect the performance of an NCS oreven cause instability.
The main stumbling block to be addressed whendealing with NCS is the stability of the overall systemwith network-induced delays and data packet dropout.Recently, much attention has been paid to the study ofthe stability analysis and control design of NCSs(Zhang, Branicky, and Phillips 2001; Zhang 2001;Montestruque and Antsaklis 2003; Jianyong, Shimin,andHaiqing 2004; Yue, Han, and Peng 2004; Yu,Wang,Chu, and Xie 2004; Yu, Wang, Chu, and Hao 2004;
Seiler and Sengupta 2005; Baillieul and Antsaklis 2007;Gupta, Hassibi, and Murray 2007; Hespanha,Naghshtabrizi, and Xu 2007; Hu, Bai, Shi, and Wu2007; Xiong and Lam 2007). Most of the existingmethods assume complete knowledge of the plant, whichis rarely the case in practice. Therefore, new adaptivedesigns are needed to handle uncertainties in NCSs.
The adaptive control problem of NCSs was firstdiscussed in Tahoun and Fang (2007a, b, c). In Tahoun
and Fang (2007a), the stability of adaptive control of
networked systems was considered with a network
inserted between sensors and the controller only, which
was extended in Tahoun and Fang (2007b) with the
network inserted between sensors and the controller
and between the controller and actuators, but without
delays and packet dropouts. In Tahoun and Fang
(2007c), an adaptive control model of NCSs in the
presence of time-varying network-induced delays was
proposed.Actuator failures may have significant damaging
effect on the performance of control systems and need
to be compensated, as they often cause undesired
system behaviour and sometimes lead to instability or
even catastrophic accidents. To improve system relia-
bility and performance, a controller has to be able to
accommodate those failures and compensate the effect
caused by them instantaneously and automatically
whenever the failures take place. There have been
several approaches for control of systems with actuator
failures including multiple models, switching and
tuning designs (Chen, Tao and Joshi 2001; Tao, Tang
and Joshi 2001; Tao, Joshi and Ma 2001; Chen, Tao
and Joshi 2002; Tao, Chen and Joshi 2002; Chen,
Tao and Joshi 2004; Du and Yang 2007). In this
article, we focus on direct adaptive solutions to the
actuator failure compensation problem, delays and
data-packets dropout in NCSs without explicit failure
detection.
*Corresponding author. Email: [email protected]
ISSN 0020–7721 print/ISSN 1464–5319 online
� 2011 Taylor & Francis
DOI: 10.1080/00207720903308975
http://www.informaworld.com
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014
An important feature of adaptive failure compen-sation is that such a design is able to adapt to changesin system failure pattern and failure values, so that inaddition to stability, asymptotic tracking of a referencesignal is ensured, despite the system and failureuncertainties.
The key design task is to find the appropriatecontroller structure and adaptive laws such that undercertain plant-model matching conditions, the adaptivecontroller can automatically adjust the remainingfunctional actuators to achieve a desired control objec-tive, despite the unknown failures of other actuators inthe controlled system (Chen, Tao, and Joshi 2004).
From the literature, it is found that the research inNCSs involves two important aspects. From theperspective of control design, the stability and theperformance of NCSs is the main issue to be consid-ered; (i.e. Zhang, Branicky, and Phillips 2001; Zhang2001; Montestruque and Antsaklis 2003; Jianyong,Shimin, and Haiqing 2004, among many others). Fromthe perspective of communication and informationtheory, the service of the network, such as schedulingstrategy, is also important when dealing with NCSs(i.e. Lee, Lee, and Lee 2005; Branicky, Phillips, andZhang 2002; Walsh and Ye 2001). The design ofcontrollers for NCSs has also been overlooked, asmany researchers start with a controller that has beendesigned, ignoring the challenges introduced by NCSsand then investigating to what extent such controllerscan guarantee stability in spite of the network. On theother hand, the results obtained for NCSs are stilllimited: most of the aforementioned results assumethat the plant is given and model parameters arecompletely available, while few articles address theanalysis and synthesis problems for NCSs whose plantparameters are partially unknown. In fact, whilecontrolling a real plant, the designer rarely knows itsparameters accurately (Narendra and Annaswamy1989). To the best of our knowledge, adaptive controlfor systems with unknown parameters in a networkenvironment has not been fully investigated, which isthe focus of this article.
This article is organised as follows: the problem isformulated in Section 2. The modelling of the delaysand data-packet dropouts is discussed in Section 3. Themain result is given in Section 4. Section 5 presents anillustrative example. Finally, we present our conclu-sions in Section 6.
2. Formulation of the problem
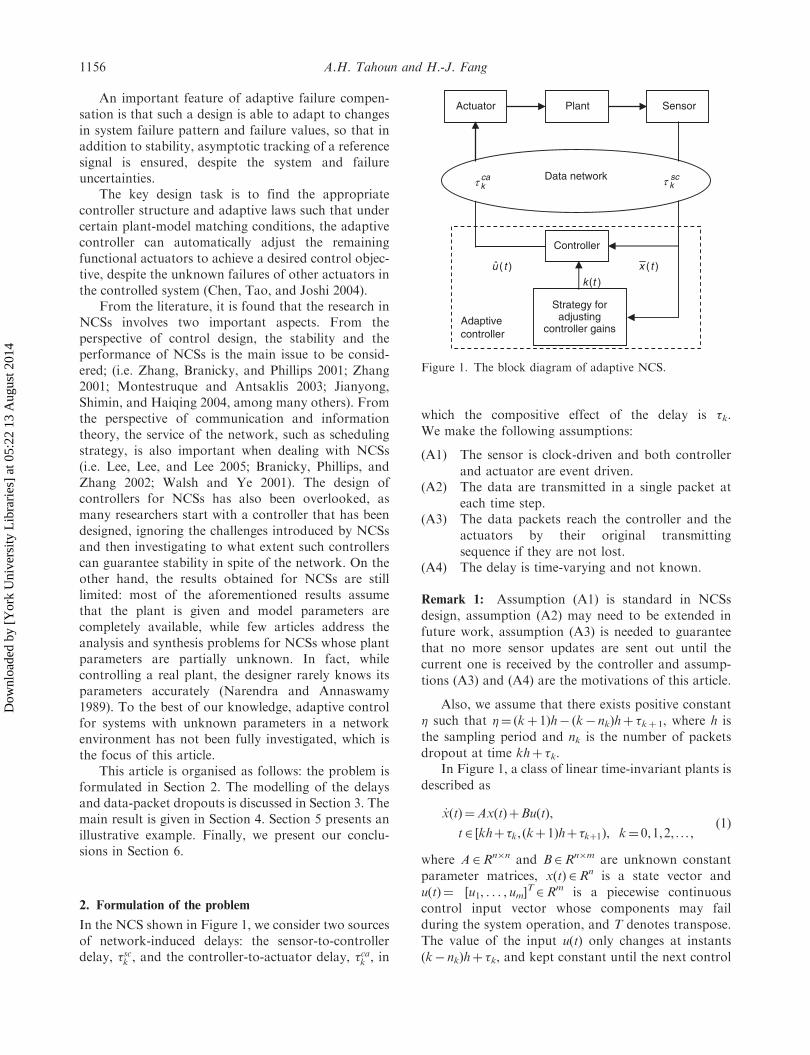
In the NCS shown in Figure 1, we consider two sourcesof network-induced delays: the sensor-to-controllerdelay, �sck , and the controller-to-actuator delay, �cak , in
which the compositive effect of the delay is �k.We make the following assumptions:
(A1) The sensor is clock-driven and both controller
and actuator are event driven.(A2) The data are transmitted in a single packet at
each time step.(A3) The data packets reach the controller and the
actuators by their original transmitting
sequence if they are not lost.(A4) The delay is time-varying and not known.
Remark 1: Assumption (A1) is standard in NCSs
design, assumption (A2) may need to be extended in
future work, assumption (A3) is needed to guarantee
that no more sensor updates are sent out until the
current one is received by the controller and assump-
tions (A3) and (A4) are the motivations of this article.
Also, we assume that there exists positive constant
� such that �¼ (kþ 1)h� (k� nk)hþ �kþ 1, where h is
the sampling period and nk is the number of packets
dropout at time khþ �k.In Figure 1, a class of linear time-invariant plants is
described as
_xðtÞ ¼AxðtÞþBuðtÞ,
t2 ½khþ �k,ðkþ1Þhþ �kþ1Þ, k¼ 0,1,2, . . . ,ð1Þ
where A2Rn�n and B2Rn�m are unknown constant
parameter matrices, x(t)2Rn is a state vector and
u(t)¼ [u1, . . . , um]T2Rm is a piecewise continuous
control input vector whose components may fail
during the system operation, and T denotes transpose.
The value of the input u(t) only changes at instants
(k� nk)hþ �k, and kept constant until the next control
)(ˆ tu )(tx
k(t )
Adaptivecontroller
Plant
Controller
SensorActuator
Data network
Strategy foradjusting
controller gains
sckτca
kτ
Figure 1. The block diagram of adaptive NCS.
1156 A.H. Tahoun and H.-J. Fang
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014

update is received at time (kþ 1� nkþ 1)hþ �kþ 1
(realised by a zero-order hold (ZOH)), where nk andnkþ 1 are the packets dropout at times khþ �k and(kþ 1)hþ �k, respectively. In Equation (1), the pair(A,B) is controllable and A, B are unknown matriceswith compatible dimensions.
2.1. Modelling of the actuator failures
In this article, we consider the type of actuator failuresmodelled as
uj ðtÞ ¼ �uj, t � tj, j 2 1, 2, . . . ,mf g, ð2Þ
where the constant value �uj and the failure time tj areunknown. For the control problem, it is assumed that
(A5) The system (1) is so constructed that for any upto m� 1 actuator failures, the remaining actua-tors can still achieve a desired control objective,when implemented with known parameters.
Remark 2: Assumption (A5) is a basic assumptionfor a class of actuator failure compensation (Chen,Tao, and Joshi 2001; Tao, Joshi, and Ma 2001; Chen,Tao, and Joshi 2002).
The key task is to adaptively adjust the remainingcontrols of the NCSs, shown in Figure 1, to achievesystem performance when there are up to m� 1actuator failures, without the knowledge of the systemsparameters.
As in Tao et al. (2001), in the presence of actuatorfailures, the input u(t) can be expressed as
uðtÞ¼ �ðtÞþ�½ �u��ðtÞ�,
t2 ½khþ �k,ðkþ1Þhþ �kþ1Þ, k¼ 0,1,2, . . . ,ð3Þ
where �ðtÞ is the designed control input, and
�u ¼ ½ �u1, �u2, . . . , �um�T
ð4Þ
� ¼ diagf�1, �2, . . . , �mg ð5Þ
�i ¼1 if the ith actuator fails0 otherwise
:
�ð6Þ
Given that the plant dynamics matrices (A,B) areunknown, and so are the actuator failure time tj,parameters �uj and j pattern, the control objective is todesign a state feedback control �ðtÞ such that all signalsin the closed-loop NCS are bounded and the statevector x(t) asymptotically converges to small constant.
2.2. Matching conditions and adaptive controllerstructure
To meet the adaptive control objective in the presenceof p-failed actuators, that is, uj ðtÞ ¼ �uj, j ¼ j1,
j2, . . . jp, 1 � p � m� 1, we assume that
(A6) There exist constant vectors K�1¼
½k�11,k�12, . . . ,k
�1m� 2R
n�m, k�2¼½k�21,k
�22, . . . ,k
�2m�
T2
Rm and k�3 ¼ ½k�31, k
�31, . . . , k�31�
T2Rm, such that
the following equations are satisfied:
Aþ BðI� �ÞK�T1 ¼ AþX
i 6¼j1,...jp
bik�T1i ¼ Am,
BðI� �Þk�2 ¼X
i 6¼j1,...jp
bik�2i ¼ bm,
BðI� �Þk�3 þ B� �u ¼X
i 6¼j1,...jp
bik�i þ
Xi¼j1,...jp
bj �uj ¼ 0,
ð7Þ
where Am and bm are known constant matrices, Am isthe Hurwitz the matrix satisfying PAm þ AT
mP ¼ �Q,and P and Q are symmetric and positive-definitematrices.
(A7) The sign of k�2i, sign½k�2i�, is known.
Remark 3: Assumption (A6) is the so-called matchingcondition (for more details see Chen et al. 2001, 2002),in which if A and B are known, the controller
��ðtÞ ¼ K�T1 xðtÞ þ k�3 ð8Þ
would lead to the network-free closed-loop systemfor t � 0
_xðtÞ ¼ AxðtÞ þ B��ðtÞ þ B�½ �u� ��ðtÞ�,
¼ AmxðtÞ � BðI� �ÞK�T1 xðtÞ
þ BðI� �Þ½K�T1 xðtÞ þ k�3� þ B �u�
¼ AmxðtÞ
whose state vector x(t) is exponentially stable, achiev-ing the control objective.
As A, B are unknown, the adaptive controller forthe considered NCS for t 2 ½khþ �k, ðkþ 1Þhþ �kþ1Þ,k ¼ 0, 1, 2, . . . , will be chosen as
uðtÞ ¼ �ðtÞ þ �½ �u� �ðtÞ�,
in which
�ðtÞ ¼ KT1 ðtÞ �xðtÞ þ k2ðtÞrðtÞ þ k3ðtÞ, ð9Þ
where K1ðtÞ 2 Rn�m, k2ðtÞ 2 Rm and kðtÞ 2 Rm are theadaptive estimates of K�1, k�2, k�3, respectively, and �xðtÞis the output of the sensor-controller network part.
Define the parameter errors
~k1iðtÞ ¼ k1iðtÞ � k�1i~k3iðtÞ ¼ k3iðtÞ � k�3i:
ð10Þ
for i¼ 1, . . . , m.
International Journal of Systems Science 1157
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014

2.3. Modelling of the delays and the packet dropout
Here, we present a new model of delays and packetdropout. As the controller is time varying, the network
can be considered as double switches (S1 and S2)rather than a single switch, as in Zhang (2001), Zhanget al. (2001) and Yu et al. (2004b), see Figure 2. When
the switch (S1 or S2) is closed (in position 1), a networkpacket is transmitted, whereas when it is open (inposition 2), the packet is lost and the old data packet is
used.The modelling of the packet loss between sensors
and the controller can be expressed as follows:
With no packet dropout at time khþ �sck :
�xðtÞ ¼ xðkhÞ
With one packet dropout at time khþ �sck :
�xðtÞ ¼ xððk� 1ÞhÞ
With two packets dropout at time khþ �sck :
�xðtÞ ¼ xððk� 2ÞhÞ
..
.
With ‘sck packets dropout at time khþ �sck :
�xðtÞ ¼ xððk� ‘sck ÞhÞ:
The quantity of dropped packets between sensors
and the controller is accumulated from the latest timewhen �xðtÞ has been updated.
The modelling of the packet loss between sensorsand the actuators can be expressed, with ‘cak packets
dropout at time khþ �k, as follows:
With no packet dropout between sensors andcontroller:
�ðtÞ ¼KT1 ððk�‘
cak Þhþ �
sck Þxððk�maxð0,‘sck�‘ca
kþ‘cak ,‘
cak ÞÞhÞ
þk3ððk�‘cak Þhþ �
sck Þ
With one packet dropout between sensors andcontroller:
�ðtÞ ¼KT1 ððk�‘
cak Þhþ �
sck Þxððk�maxð1,‘sck�‘ca
kþ‘cak ,‘
cak ÞÞhÞ
þk3ððk�‘cak Þhþ �
sck Þ
With two packet dropout between sensors and
controller:
�ðtÞ ¼KT1 ððk�‘
cak Þhþ �
sck Þxððk�maxð2,‘sck�‘ca
kþ‘cak ,‘
cak ÞÞhÞ
þk3ððk�‘cak Þhþ �
sck Þ
..
.
In general, the modelling of the packet loss between
sensors and the actuators with ‘sck packets dropout
between sensors and controller and ‘cak packets drop-
out between the controller and the actuators can be
summarised at time khþ �k as follows:
�ðtÞ ¼ KT1 ððk� ‘
cak Þhþ �
sck Þxððk� nkÞhÞ
þ k3ððk� ‘cak Þhþ �
sck Þ, ð11Þ
where
nk ¼ maxð‘sck , ‘sck�‘ca
kþ ‘cak , ‘
cak Þ 2 f0, 1, 2, . . .g:
Again, the quantity of dropped packets between the
controller and the actuators is accumulated from the
latest time when �ðtÞ has been updated.
Remark 4: When ‘sck ¼ ‘cak , it means that the packet is
dropped between sensors and controller and between
the controller and the actuators in the same transmis-
sion period. In this case, � (t) is replaced by
�ðtÞ ¼ kT1 ððk� ‘sck Þhþ �
sck Þxððk� ‘
sck ÞhÞ
þ k3ððk� ‘sck Þhþ �
sck Þ:
Remark 5: When ‘sck ¼ ‘cak ¼ 0, it means that no
packet is dropped or rejected in the transmission. In
this case, �(t) is replaced by
�ðtÞ ¼ kT1 ðkhþ �sck ÞxðkhÞ þ k3ðkhþ �
sck Þ:
Thus, the above model (10) of the network can be
viewed as a general form of NCS model, where the
effects of packet loss and delays are simultaneously
considered.From Equations (1) and (3), for t 2 ½khþ �k,
ðkþ 1Þhþ �kþ1Þ, k ¼ 0, 1, 2, . . . , we get
_xðtÞ ¼ AxðtÞ þ B�ðtÞ þ B�ð �u� �ðtÞÞ,
xðtÞ ¼ xð0Þ, t 2 ½0, �0Þ:
Using Equation (7), we obtain
_xðtÞ ¼ AmxðtÞ � BðI� �ÞK�T1 xðtÞ þ BðI� �Þ�ðtÞ þ B� �u:
ð12Þ
From Equations (10) and (11), it can be found that
_xðtÞ ¼AmxðtÞþBðI��Þ½KT1 ððk�‘
cak Þhþ �
sck Þxððk�nkÞhÞ
þk3ððk�‘cak Þhþ �
sck Þ�þB� �u�BðI��ÞK�T1 xðtÞ:
Plant
Adaptivecontroller
SensorActuator
)(txu (t )
u (t )
Memory sck
S1S2
12
1 2Memory cak
Figure 2. NCS setup with data packet dropout.
1158 A.H. Tahoun and H.-J. Fang
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014

Rearranging, _xðtÞ becomes
_xðtÞ¼AmxðtÞþBðI��Þ½ ~KT1 ððk�‘
cak Þhþ �
sck Þxððk�nkÞhÞ
þ ~k3ððk�‘cak Þhþ �
sck Þ�
þBðI��Þ½K�T1 xððk�nkÞhÞþk�3�
þB� �u�BðI��ÞK�T1 xðtÞ:
Using the formula
xðtÞ ¼ xððk� nkÞhÞ þ
Z t
ðk�nkÞh
_xðsÞds,
we have
_xðtÞ¼AmxðtÞþBðI��Þ½ ~KT1 ððk�‘
cak Þhþ �
sck Þxððk�nkÞhÞ
þ ~k3ððk�‘cak Þhþ �
sck Þ��BðI��ÞK�T1
Z t
ðk�nkÞh
_xðsÞds
Rearranging, we have
_xðtÞ ¼AmxðtÞþX
j6¼j1,...jp
bj ~kT1jððk�‘cak Þhþ �
sck Þxððk�nkÞhÞ
þX
j6¼j1,...jp
bj ~k3jððk�‘cak Þhþ �
sck Þ
�BðI��ÞK�T1
Z t
ðk�nkÞh
_xðsÞds ð13Þ
2.4. Normalised adaptive laws
For the considered adaptive NCS, the normalisedadaptive control law is chosen, for j ¼ 1, . . . ,m,t 2 ½khþ �k, ðkþ 1Þhþ �kþ1Þ, k ¼ 0, 1, 2 to be
_k1jðtÞ ¼ �sign½k�2j��1jxðtÞx
TðtÞPbs
,
_k3jðtÞ ¼ �sign½k�2j��2j x
TðtÞPbs
,
ð14Þ
where ¼ 1þ xððk� ‘sck ÞhÞ�� ��2þ kðk� ‘cak Þhþ �
sck
�� ��2,and �1j is an n� n symmetric positive-definite adapta-tion gain matrix, �1j4 0.0
Remark 6: The normalised adaptive law is used hereto cancel xððk� nkÞhÞ
�� �� that will appear in the upperbound � in the following theorem, in which � becamelarger.
Now, we will give our controller design method forNCS (1) with the adaptive control input (3) and (11)based on the Lyapunov stability criterion.
3. Main result
The main result of this article will be treated in thefollowing theorem.
Theorem 1: The overall adaptive NCS with a linear
time-invariant plant (1) achieving Assumptions
(A1)–(A7) and an adaptive stabiliser (3) and (11) is
globally stable if the adaptive control laws take the form
(14) and � satisfies
� ¼�P3
i¼11�iþM Ak k2þM Ak k2
P3i¼1
1�iþ �1 þ �2
for 05�5 minðQÞ, where
�1 ¼ �1 Pk k4X
j 6¼j1,...,jp
bj�� ��2 �1k k2 bmk k
2
þ �2 Pk k4X
j6¼j1,...,jp
bj�� ��2 �2k k2 bmk k
2
þ1
�4Pk k2
Xj6¼j1,...,jp
bik k2 kT1jðt� �
cak Þ þ Aþ Am
��� ���2þ �6 kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��2þM Bk k2 kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��2,�2 ¼
2
�5Pk k2
Xj6¼j1,...,jp
bik3jðt� �cak Þ þ B� �u
�� ��2þ 2�7 k3ððk� ‘
cak Þhþ �
sck Þ
�� ��2þ2�8 �u2
þ 2M k3ððk� ‘cak Þhþ �
sck Þ
�� ��2þ2M Bk k2 �u2
þ M Bk k2 kT1 ððk� ‘cak Þhþ �
sck Þ
�� ��� k3ððk� ‘
cak ÞhÞ
�� �� xððk� nkÞhÞ�� ��
þ 2M Bk k2 �u k3ððk� ‘cak ÞhÞ
�� ��þ M Bk k2 �u kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��� xððk� nkÞhÞ�� ��,
and M ¼ �3 Pk k Ak k þ Amk kð Þ2þ �4 þ �5 for positive
constants , �i, i¼ 1, 2, 3, 4, 5, 6, 7, 8.
Proof: Consider a positive-definite Lyapunov func-
tion V(t) of the form
VðtÞ ¼ V1ðtÞ þ V2ðtÞ þ V3ðtÞ, ð15Þ
where
V1ðtÞ ¼ xTðtÞPxðtÞ
þX
j6¼j1,...,jp
1
k�2j
��� ��� ~kT1jðt� �cak Þ�
�1j
~k1jðt� �cak Þ
þX
j6¼j1,...,jp
1
k�2j
��� ��� ~k23jðt� �cak Þ�
�1j ,
V2ðtÞ ¼
Z t
ðk�ikÞh
xðsÞRxðsÞds,
V3ðtÞ ¼M
Z t
t��
Z t
s
_xðvÞ _xðvÞdv ds:
International Journal of Systems Science 1159
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014

Differentiating Vi(t) i¼ 1, 2, 3, with respect to t, for
t 2 ½khþ �k, ðkþ 1Þhþ �kþ1Þ, k ¼ 0, 1, 2, . . . , we have
_V1ðtÞ ¼ _xTðtÞPxðtÞ þ xTðtÞP _xðtÞ
þX
j6¼j1;...;jp
2
k�2j
��� ���_~kT
1jðt� �cak Þ�
�1j
~k1jðt� �cak Þ
þX
j6¼j1;...;jp
1
k�2j
��� ���_~k3jðt� �
cak Þ�
�1j
~k3jðt� �cak Þ,
_V2ðtÞ ¼ xTðtÞRxðtÞ � xTððk� ikÞhÞRxððk� ikÞhÞ,
_V3ðtÞ ¼ �M _xTðtÞ _xðtÞ �M
Z t
t��
_xTðsÞ _xðsÞds
Substituting for _xðtÞ, _k1jðtÞ and _k3jðtÞ from Equations
(13) and (14), taking into account sign½k�2j�jk�2jj ¼ k�2j,
we have
_V1ðtÞ ¼ xTðtÞATmPxðtÞ þ xTðtÞPAmxðtÞ
þ 2xTðtÞPX
j6¼j1,...,jp
bj ~kT1jððk� ‘cak Þhþ �
sck Þ
� xððk� nkÞhÞ
þ 2xTðtÞPX
j6¼j1,...,jp
bj ~k3jððk� ‘cak Þhþ �
sck Þ
� 2xTðtÞPBðI� �Þk�T1
Z t
ðk�nkÞh
_xðsÞds
þ 2X
j6¼j1,...,jp
xTððk� nkÞhÞPbi ~kT1jðt� �cak Þ
� xððk� nkÞhÞ
þ 2X
j6¼j1,...,jp
xTððk� nkÞhÞPbi ~k3jðt� �cak Þ: ð16Þ
and
_V3ðtÞ ¼ �MxTðtÞATAxðtÞ þ 2�MxTðtÞATBuðtÞ
þ �MuTðtÞuðtÞBTB�M
Z t
t��
_xTðsÞ _xðsÞds:
Rearranging Equation (16) yields
_V1ðtÞ ¼�xTðtÞQxðtÞ
þ2xTðtÞPX
j6¼j1,...,jp
bj ~kT1jððk�‘cak Þhþ �
sck Þxððk�nkÞhÞ
þ2xTðtÞPX
j6¼j1,...,jp
bj ~k3jððk�‘cak Þhþ �
sck Þ
�2xTðtÞPBðI��Þk�T1
Z t
ðk�nkÞh
_xðsÞds
�2X
j6¼j1,...,jp
xTððk�nkÞhÞPbi ~kT1jðt� �cak Þxððk�nkÞhÞ
�2X
j6¼j1,...,jp
xTððk�nkÞhÞPbi ~k3jðt� �cak Þ
þ2X
j6¼j1,...,jp
xTðtÞPbi ~kT1jðt� �cak Þxððk�nkÞhÞ
�2X
j6¼j1,...,jp
xTðtÞPbi ~kT1jðt� �cak Þxððk�nkÞhÞ
þ2X
j6¼j1,...,jp
xTðtÞPbi ~k3jðt� �cak Þ
�2X
j6¼j1,...,jp
xTðtÞPbi ~k3jðt� �cak Þ: ð17Þ
Define
D ~kT1jðt� 0�cak Þ ¼~kT1jðt� �
cak Þ �
~kT1jððk� jkÞhþ �sck Þ,
D ~kT3jðt� �cak Þ ¼
~kT3jðt� �cak Þ �
~kT3jððk� jkÞhþ �sck Þ:
Then Equation (17) becomes
_V1ðtÞ ¼�xTðtÞQxðtÞ
þ2xTðtÞPX
j6¼j1,...,jp
bjD ~kT1jððk�‘cak Þhþ �
sck Þxððk�nkÞhÞ
þ2xTðtÞPX
j6¼j1,...,jp
bjD ~k3jððk�‘cak Þhþ �
sck Þ
�2xTðtÞPBðI��Þk�T1
Z t
ðk�nkÞh
_xðsÞds
�2X
j6¼j1,...,jp
Pbi ~kT1jðt� �cak Þxððk�nkÞhÞ
Z t
ðk�nkÞh
_xðsÞds
�2X
j6¼j1,...,jp
Pbi ~k3jðt� �cak Þ
Z t
ðk�nkÞh
_xðsÞds:
Using the well-known inequalities (Moon, Park, and
Kwon 2001)
�2aTb �1
�aTaþ �bTb ð18Þ
for any a, b2Rn and scalar �4 0, we haveZ khþ�k
ðk�ikÞh
_xðsÞ�� ��ds � Z t
t��
_xðsÞ�� ��ds,
t 2 ½khþ �k, ðkþ 1Þhþ �kþ1Þ, k ¼ 0, 1, 2, . . . ð19Þ
andZ t
t��
xðsÞds
� �T Z t
t��
xðsÞds
� �� �
Z t
t��
xTðsÞxðsÞds, ð20Þ
where, �¼ (1þ ik)hþ �kþ 1, _VðtÞ becomes bounded
from above as
_VðtÞ��minðQÞ xðtÞ�� ��2þX3
i¼1
�
�ixðtÞ�� ��2þ�M Ak k2 xðtÞ
�� ��2
þX8i¼6
�
�iM Ak k2 xðtÞ
�� ��2þR xðtÞ�� ��2
þ�1 Pk k2
�
Xj6¼j1,...,jp
bj�� ��2 D ~kT1jððk�‘
cak Þhþ�
sck Þ
��� ���2� xððk�nkÞhÞ�� ��2
1160 A.H. Tahoun and H.-J. Fang
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014

þ�2 Pk k2
�
Xj6¼j1,...jp
bj�� ��2 D ~k3jððk� ‘
cak Þhþ �
sck Þ
��� ���2
þ�
�4
Xj 6¼j1,...,jp
Pbi ~kT1jðt� �cak Þ
��� ���2 xððk� nkÞhÞ�� ��2
þ�
�5
Xj 6¼j1,...,jp
Pbi ~k3jðt� �cak Þ
��� ���2 � R xððk� ikÞhÞ�� ��2
þ ½�3 PBðI� �Þk�T1�� ��2þ �4 þ �5�
Z t
t��
_xðsÞ�� ��2ds
þ �6� Bk k2 kT1 ððk� ‘cak Þhþ �
sck Þ
�� ��2 xððk� nkÞhÞ�� ��2
þ �7� Bk k2 k3ððk� ‘cak Þhþ �
sck Þ
�� ��2þ�8� Bk k2 �u2
þ �M Bk k2 kT1 ððk� ‘cak Þhþ �
sck Þ
�� ��2 xððk� nkÞhÞ�� ��2
þ �M k3ððk� ‘cak Þhþ �
sck Þ
�� ��2þ�M Bk k2 �u2
þ �M Bk k2 kT1 ððk� ‘cak Þhþ �
sck Þ
�� �� k3ððk� ‘cak ÞhÞ
�� ��� xððk� nkÞhÞ�� ��þ �M Bk k2 �u kT1 ððk� ‘
cak Þhþ �
sck Þ
�� �� xððk� nkÞhÞ�� ��
þ �M Bk k2 �u k3ððk� ‘cak ÞhÞ
�� ���M
Z t
t��
_xðsÞ�� ��2ds:
From (14), where
Dk1jðt� �cak Þ�� �� � �1k k bmk k Pk k�,
Dk3jðt� �cak Þ�� �� � �2k k bmk k Pk k�,
_VðtÞ becomes
_VðtÞ � �minðQÞ þX3i¼1
�
�i
"þ �M Ak k2þ �M ATB
�� ��2
�X8i¼6
1
�iþ R
#xðtÞ�� ��2
þ �1� Pk k4X
j6¼j1,...,jp
bj�� ��2 �1k k2 bmk k
2
24� xððk� nkÞhÞ�� ��4
þ �2� Pk k4X
j 6¼j1,...,jp
bj�� ��2 �2k k2 bmk k
2
þ�
�4
Xj 6¼j1,...,jp
Pbi ~kT1jðt� �cak Þ
��� ���2þ �6� kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��2þ �M Bk k2 kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��2�Ri� xððk� nkÞhÞ�� ��2
þ�
�5
Xj 6¼j1,...,jp
Pbi ~k3jðt� �cak Þ
��� ���2þ �7� k3ððk� ‘
cak Þhþ �
sck Þ
�� ��2þ�8� �u2
þ �M k3ððk� ‘cak Þhþ �
sck Þ
�� ��2þ�M Bk k2 �u2
þ �M Bk k2 kT1 ððk� ‘cak Þhþ �
sck Þ
�� ��� k3ððk� ‘
cak ÞhÞ
�� �� xððk� nkÞhÞ�� ��
þ �M Bk k2 �u kT1 ððk� ‘cak Þhþ �
sck Þ
�� ��� xððk� nkÞhÞ�� ��þ �M Bk k2 �u k3ððk� ‘
cak ÞhÞ
�� ��þ ½�3 PBðI� �Þk�T1
�� ��2þ�4 þ �5��
Z t
t��
_xðsÞ�� ��2ds�M
Zt��
_xðsÞ�� ��2ds:
If the adaptation stopped when xððk� nkÞhÞ�� ��5 1,
4 1, and by choosing R ¼ ��1 þ ��2, where
�1 ¼�1 Pk k4X
j 6¼j1,...,jp
bj�� ��2 �1k k2 bmk k
2 xððk� nkÞhÞ�� ��4
þ �2 Pk k4X
j6¼j1,...,jp
bj�� ��2 �2k k2 bmk k
2
þ1
�4Pk k2
Xj6¼j1,...,jp
bik k2 kT1jðt� �
cak Þ þ Aþ Am
��� ���2þ �6 kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��2þM Bk k2 kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��2,�2 ¼
2
�5Pk k2
Xj 6¼j1,...,jp
bik3jðt� �cak Þ þ B� �u
�� ��2þ 2�7 k3ððk� ‘
cak Þhþ �
sck Þ
�� ��2þ2�8 �u2
þ 2M k3ððk� ‘cak Þhþ �
sck Þ
�� ��2þ2M Bk k2 �u2
þ M Bk k2 kT1 ððk� ‘cak Þhþ �
sck Þ
�� ��� k3ððk� ‘
cak ÞhÞ
�� �� xððk� nkÞhÞ�� ��
þ 2M Bk k2 �u k3ððk� ‘cak ÞhÞ
�� ��þ M Bk k2 �u kT1 ððk� ‘
cak Þhþ �
sck Þ
�� ��xððk� nkÞhÞ�� ��
and
M ¼ �3 Pk k Ak k þ Amk kð Þ2þ �4 þ �5, we get
_VðtÞ � �minðQÞ þX3i¼1
�
�i
"þ �M Ak k2
þM Ak k2X3i¼1
�
�iþ ��1 þ ��2
#xðtÞ�� ��2:
Again, by choosing
� ¼�P3
i¼11�iþM Ak k2þM Ak k2
P3i¼1
1�iþ �1 þ �2
ð21Þ
for 05�5 minðQÞ, _VðtÞ becomes
_VðtÞ � �minðQÞ þ �½ � xðtÞ�� ��2:
International Journal of Systems Science 1161
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014
Finally, we can conclude that _VðtÞ5 0, if � satisfies
(21). Therefore, x(t), k1jðtÞ, k3jðtÞ and V(t) are bounded
for all t� t0 and the over all system is globally stable.
We therefore obtained the desired result.
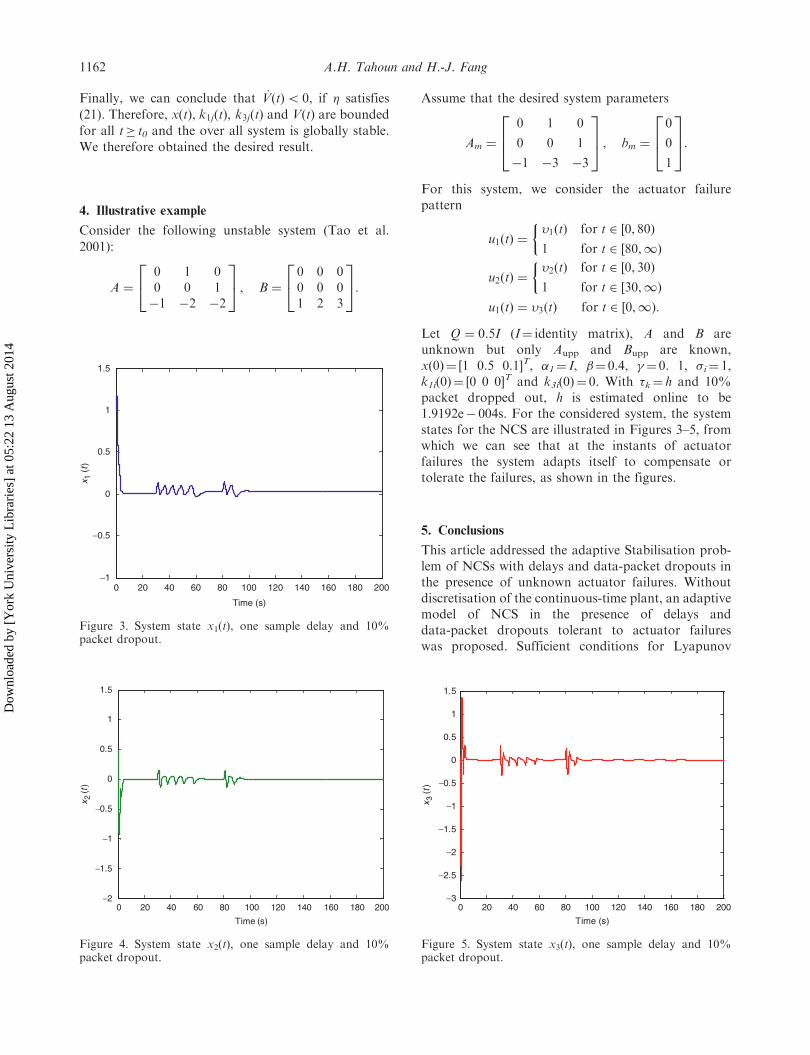
4. Illustrative example
Consider the following unstable system (Tao et al.
2001):
A ¼0 1 00 0 1�1 �2 �2
24
35 , B ¼
0 0 00 0 01 2 3
24
35:
Assume that the desired system parameters
Am ¼
0 1 0
0 0 1
�1 �3 �3
264
375 , bm ¼
0
0
1
264
375:
For this system, we consider the actuator failurepattern
u1ðtÞ ¼�1ðtÞ for t 2 0, 80½ Þ
1 for t 2 80,1½ Þ
�
u2ðtÞ ¼�2ðtÞ for t 2 0, 30½ Þ
1 for t 2 30,1½ Þ
�u1ðtÞ ¼ �3ðtÞ for t 2 0,1½ Þ:
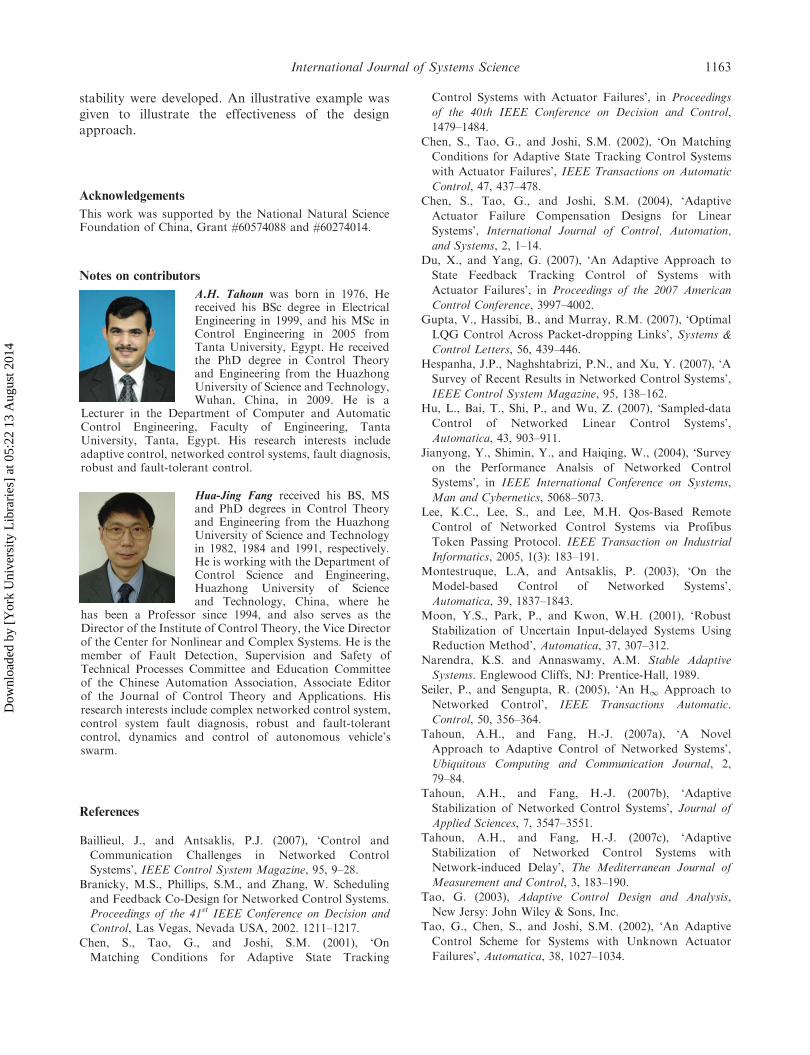
Let Q ¼ 0:5I (I¼ identity matrix), A and B areunknown but only Aupp and Bupp are known,x(0)¼ [1 0.5 0.1]T, �1¼ I, �¼ 0.4, ¼ 0. 1, �i¼ 1,k1i(0)¼ [0 0 0]T and k3i(0)¼ 0. With �k¼ h and 10%packet dropped out, h is estimated online to be1.9192e� 004s. For the considered system, the systemstates for the NCS are illustrated in Figures 3–5, fromwhich we can see that at the instants of actuatorfailures the system adapts itself to compensate ortolerate the failures, as shown in the figures.
5. Conclusions
This article addressed the adaptive Stabilisation prob-lem of NCSs with delays and data-packet dropouts inthe presence of unknown actuator failures. Withoutdiscretisation of the continuous-time plant, an adaptivemodel of NCS in the presence of delays anddata-packet dropouts tolerant to actuator failureswas proposed. Sufficient conditions for Lyapunov
0 20 40 60 80 100 120 140 160 180 200−1
−0.5
0
0.5
1
1.5
Time (s)
x 1 (
t)
Figure 3. System state x1(t), one sample delay and 10%packet dropout.
0 20 40 60 80 100 120 140 160 180 200−2
−1.5
−1
−0.5
0
0.5
1
1.5
Time (s)
x 2 (t
)
Figure 4. System state x2(t), one sample delay and 10%packet dropout.
0 20 40 60 80 100 120 140 160 180 200−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
Time (s)
x 3 (t
)
Figure 5. System state x3(t), one sample delay and 10%packet dropout.
1162 A.H. Tahoun and H.-J. Fang
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014
stability were developed. An illustrative example wasgiven to illustrate the effectiveness of the designapproach.
Acknowledgements
This work was supported by the National Natural ScienceFoundation of China, Grant #60574088 and #60274014.
Notes on contributors
A.H. Tahoun was born in 1976, Hereceived his BSc degree in ElectricalEngineering in 1999, and his MSc inControl Engineering in 2005 fromTanta University, Egypt. He receivedthe PhD degree in Control Theoryand Engineering from the HuazhongUniversity of Science and Technology,Wuhan, China, in 2009. He is a
Lecturer in the Department of Computer and AutomaticControl Engineering, Faculty of Engineering, TantaUniversity, Tanta, Egypt. His research interests includeadaptive control, networked control systems, fault diagnosis,robust and fault-tolerant control.
Hua-Jing Fang received his BS, MSand PhD degrees in Control Theoryand Engineering from the HuazhongUniversity of Science and Technologyin 1982, 1984 and 1991, respectively.He is working with the Department ofControl Science and Engineering,Huazhong University of Scienceand Technology, China, where he
has been a Professor since 1994, and also serves as theDirector of the Institute of Control Theory, the Vice Directorof the Center for Nonlinear and Complex Systems. He is themember of Fault Detection, Supervision and Safety ofTechnical Processes Committee and Education Committeeof the Chinese Automation Association, Associate Editorof the Journal of Control Theory and Applications. Hisresearch interests include complex networked control system,control system fault diagnosis, robust and fault-tolerantcontrol, dynamics and control of autonomous vehicle’sswarm.
References
Baillieul, J., and Antsaklis, P.J. (2007), ‘Control and
Communication Challenges in Networked Control
Systems’, IEEE Control System Magazine, 95, 9–28.Branicky, M.S., Phillips, S.M., and Zhang, W. Scheduling
and Feedback Co-Design for Networked Control Systems.
Proceedings of the 41st IEEE Conference on Decision andControl, Las Vegas, Nevada USA, 2002. 1211–1217.
Chen, S., Tao, G., and Joshi, S.M. (2001), ‘OnMatching Conditions for Adaptive State Tracking
Control Systems with Actuator Failures’, in Proceedings
of the 40th IEEE Conference on Decision and Control,
1479–1484.
Chen, S., Tao, G., and Joshi, S.M. (2002), ‘On Matching
Conditions for Adaptive State Tracking Control Systems
with Actuator Failures’, IEEE Transactions on Automatic
Control, 47, 437–478.Chen, S., Tao, G., and Joshi, S.M. (2004), ‘Adaptive
Actuator Failure Compensation Designs for Linear
Systems’, International Journal of Control, Automation,
and Systems, 2, 1–14.Du, X., and Yang, G. (2007), ‘An Adaptive Approach to
State Feedback Tracking Control of Systems with
Actuator Failures’, in Proceedings of the 2007 American
Control Conference, 3997–4002.Gupta, V., Hassibi, B., and Murray, R.M. (2007), ‘Optimal
LQG Control Across Packet-dropping Links’, Systems &
Control Letters, 56, 439–446.
Hespanha, J.P., Naghshtabrizi, P.N., and Xu, Y. (2007), ‘A
Survey of Recent Results in Networked Control Systems’,
IEEE Control System Magazine, 95, 138–162.Hu, L., Bai, T., Shi, P., and Wu, Z. (2007), ‘Sampled-data
Control of Networked Linear Control Systems’,
Automatica, 43, 903–911.Jianyong, Y., Shimin, Y., and Haiqing, W., (2004), ‘Survey
on the Performance Analsis of Networked Control
Systems’, in IEEE International Conference on Systems,
Man and Cybernetics, 5068–5073.Lee, K.C., Lee, S., and Lee, M.H. Qos-Based Remote
Control of Networked Control Systems via Profibus
Token Passing Protocol. IEEE Transaction on Industrial
Informatics, 2005, 1(3): 183–191.
Montestruque, L.A, and Antsaklis, P. (2003), ‘On the
Model-based Control of Networked Systems’,
Automatica, 39, 1837–1843.Moon, Y.S., Park, P., and Kwon, W.H. (2001), ‘Robust
Stabilization of Uncertain Input-delayed Systems Using
Reduction Method’, Automatica, 37, 307–312.Narendra, K.S. and Annaswamy, A.M. Stable Adaptive
Systems. Englewood Cliffs, NJ: Prentice-Hall, 1989.Seiler, P., and Sengupta, R. (2005), ‘An H1 Approach to
Networked Control’, IEEE Transactions Automatic.
Control, 50, 356–364.Tahoun, A.H., and Fang, H.-J. (2007a), ‘A Novel
Approach to Adaptive Control of Networked Systems’,
Ubiquitous Computing and Communication Journal, 2,
79–84.Tahoun, A.H., and Fang, H.-J. (2007b), ‘Adaptive
Stabilization of Networked Control Systems’, Journal of
Applied Sciences, 7, 3547–3551.Tahoun, A.H., and Fang, H.-J. (2007c), ‘Adaptive
Stabilization of Networked Control Systems with
Network-induced Delay’, The Mediterranean Journal of
Measurement and Control, 3, 183–190.Tao, G. (2003), Adaptive Control Design and Analysis,
New Jersy: John Wiley & Sons, Inc.Tao, G., Chen, S., and Joshi, S.M. (2002), ‘An Adaptive
Control Scheme for Systems with Unknown Actuator
Failures’, Automatica, 38, 1027–1034.
International Journal of Systems Science 1163
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014

Tao, G., Joshi, S.M., and Ma, X. (2001), ‘Adaptive StateFeedback and Tracking Control of Systems with Actuator
Failures’, IEEE Transactions on Automatic Control, 46,78–95.
Tao, G., Tang, X.D., and Joshi, S.M. (2001), ‘OutputTracking Actuator Failure Compensation Control’,
Proceedings of the 2001 American Control Conference,1821–1826.
Walsh, G.C. and Ye, H. Scheduling of Networked Control
Systems. IEEE Contol System Magazine, 2001, 21(1):57–65.
Xiong, J., and Lam, J. (2007), ‘Stabilization of Linear
Systems Over Networks with Bounded Packet Loss’,Automatica, 43, 80–87.
Yu, M., Wang, L., Chu, T., and Hao, F., (2004a), ‘An LMIApproach to Networked Control Systems with Data
Packet Dropout and Transmission Delays’, 43rd IEEEConference on Decision and Control, 3545–3550.
Yu, M., Wang, L., Chu, T., and Xie, G., (2004b),‘Stabilization of Networked Control Systems with DataPacket Dropout and Network Delays via Switching SystemApproach’, in 43rd IEEE Conference on Decision and
Control, 3539–3544.Yue, D., Han, Q., and Peng, C. (2004), ‘State FeedbackController Design of Networked Control Systems’, IEEE
Transactions on Circuits and Systems-II: Express Briefs, 51,640–644.
Zhang, W., (2001), ‘Stability Analysis of Networked Control
Systems’, PhD thesis, Case Westem Reserve University.Zhang, W., Branicky, M.S., and Phillips, S.M. (2001),‘Stability of Networked Control Systems’, IEEE ControlSystem Magazine, 21, 84–99.
1164 A.H. Tahoun and H.-J. Fang
Dow
nloa
ded
by [
Yor
k U
nive
rsity
Lib
rari
es]
at 0
5:22
13
Aug
ust 2
014


















