
Adaptive PID Controller Based on Real Base Function ... · PDF fileAdaptive PID Controller...
11
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 1 ISSN 2250-3153 www.ijsrp.org Adaptive PID Controller Based on Real Base Function Network Identification, and Genetic Algorithm in Automatic Voltage Regulator System M.W. Mustafa*, Abdullah J. H. Al Gizi1* ,Malik A. Alsaedi** * Faculty of Electrical Engineering, Universiti Teknologi Malaysia ** Institute of High Voltage and High Current, Universiti Teknologi Malaysia Abstract- Adaptive PID controller based on real base function (RBF) network identification by optimal tuning of proportional – integral–derivative (PID) controller parameter is necessary for thematic factory operation of an automatic voltage regulator (AVR) system. This study presents a combined genetic algorithm (GA) and real base function network (RBF) identification control approach to determine the optimal PID controller parameters and AVR system. The problem of obtaining the optimal AVR and PID controller parameters is formulated as an optimization problem and real base function network (RBF) identification tuning by genetic algorithm (GA) is applied to solve the optimization problem. The proposed approach has resulted in AVR and PID controller with a good short- term response. The optimal PID gains obtained by the proposed RBF tuning by genetic for various operating conditions are used to improve the short-term response of AVR system. The suitability of the proposed approach for PID controller tuning has been demonstrated through computer simulations in an AVR system. Index Terms- AVR, GA, RBF I. INTRODUCTION he major reason of the AVR is to manage the end voltage by regulating the dynamo stimulus voltage. AVR have to remain pathway of the generator end voltage whole the time and below any weight state, ready so as to keep on the voltage in firm edges. In spite of significant researches in the expansion of forward manage schemes; the classical PID managers [1 –5] stay the managers of alternative to manage the AVR due to its simple arrangement and robustness to dissimilarities of the scheme limits. High-quality alternative of the PID manager limits is essential for the acceptable procedure of the AVR. Conventional, the PID manager limits are reviewed utilizing Ziegler–Nichols (ZN) [1, 2] and Cohen Coon techniques [6, 7], the limits of the manager are got for an in service point for together these methods, anywhere the replica should be investigated linear. This involves that there is sub-optimal change at what time a procedure purposes outside the soundness region of the replica. Inside control form [8] overcomes the ahead of said complexity but its plan calculations might be hard for higher order procedure. On the other hand, mathematical optimization methods similar to gradient descent method are able to functional to obtain the restrictions of the PID managers. There are a number of rapidly computations, other than with a changeable reply surface, these methods are extremely receptive to preliminary points and often get together to local best answers or diverge in whole. In [9], a top PID manager for a general second-order scheme has been enhanced using linear-quadratic regulator (LQR) method. This method needs a good choice of weighting functions for satisfactory presentation. Calculation methods like a genetic algorithm (GA)[10–13] and particle swarm optimization(PSO) [14] have been used to get the top manager limits. GA is a worldwide look for algorithm reckon on the law of ‘survival of the fittest’. Devaraj et al. [12] for proposed an improved genetic algorithm (GA) for PI manager change in pH procedure. A hybrid GA and bacterial foraging way was proposed in [13] to adjust the PID manager of an AVR. Gaing [14] has optional a novel plan technique for formative the PID manager limits of the AVR system using the PSO method, which is created by social execution styles of creatures such as fish schooling and bird flocking . On the other hand, neural networks have been extensively used in manage of nonlinear systems and the recognition, estimation [15], [16]. Neural networks have been deliberate in offline estimation of the value function [17] where NN was trained using smallest amount square method. In addition, nonlinear H∞ control using RBF-NN has been accounted in [18]. This method is based on the guess of the value function using nonlinear RBF-NN where the network is trained, offline, using gradient method. Whereas, both GA and PSO experience from computational load and memory condition and so they are not appropriate for on-line applications. To conquer the above complexities, this paper suggested adaptive PID controller depends on RBF network identification tuning by genetic algorithm to obtain optimal PID parameters of an AVR. T
Transcript of Adaptive PID Controller Based on Real Base Function ... · PDF fileAdaptive PID Controller...
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 1 ISSN 2250-3153
www.ijsrp.org
Adaptive PID Controller Based on Real Base Function
Network Identification, and Genetic Algorithm in
Automatic Voltage Regulator System
M.W. Mustafa*, Abdullah J. H. Al Gizi1* ,Malik A. Alsaedi**
* Faculty of Electrical Engineering, Universiti Teknologi Malaysia
** Institute of High Voltage and High Current, Universiti Teknologi Malaysia
Abstract- Adaptive PID controller based on real base function (RBF) network identification by optimal tuning of proportional–
integral–derivative (PID) controller parameter is necessary for thematic factory operation of an automatic voltage regulator (AVR)
system. This study presents a combined genetic algorithm (GA) and real base function network (RBF) identification control approach
to determine the optimal PID controller parameters and AVR system. The problem of obtaining the optimal AVR and PID controller
parameters is formulated as an optimization problem and real base function network (RBF) identification tuning by genetic algorithm
(GA) is applied to solve the optimization problem. The proposed approach has resulted in AVR and PID controller with a good short-
term response. The optimal PID gains obtained by the proposed RBF tuning by genetic for various operating conditions are used to
improve the short-term response of AVR system. The suitability of the proposed approach for PID controller tuning has been
demonstrated through computer simulations in an AVR system.
Index Terms- AVR, GA, RBF
I. INTRODUCTION
he major reason of the AVR is to manage the end voltage by regulating the dynamo stimulus voltage. AVR have to remain
pathway of the generator end voltage whole the time and below any weight state, ready so as to keep on the voltage in firm edges.
In spite of significant researches in the expansion of forward manage schemes; the classical PID managers [1–5] stay the managers of
alternative to manage the AVR due to its simple arrangement and robustness to dissimilarities of the scheme limits. High-quality
alternative of the PID manager limits is essential for the acceptable procedure of the AVR. Conventional, the PID manager limits are
reviewed utilizing Ziegler–Nichols (ZN) [1, 2] and Cohen Coon techniques [6, 7], the limits of the manager are got for an in service
point for together these methods, anywhere the replica should be investigated linear. This involves that there is sub-optimal change at
what time a procedure purposes outside the soundness region of the replica. Inside control form [8] overcomes the ahead of said
complexity but its plan calculations might be hard for higher order procedure. On the other hand, mathematical optimization methods
similar to gradient descent method are able to functional to obtain the restrictions of the PID managers. There are a number of rapidly
computations, other than with a changeable reply surface, these methods are extremely receptive to preliminary points and often get
together to local best answers or diverge in whole. In [9], a top PID manager for a general second-order scheme has been enhanced
using linear-quadratic regulator (LQR) method. This method needs a good choice of weighting functions for satisfactory presentation.
Calculation methods like a genetic algorithm (GA)[10–13] and particle swarm optimization(PSO) [14] have been used to get the top
manager limits. GA is a worldwide look for algorithm reckon on the law of ‘survival of the fittest’. Devaraj et al. [12] for proposed an
improved genetic algorithm (GA) for PI manager change in pH procedure. A hybrid GA and bacterial foraging way was proposed in
[13] to adjust the PID manager of an AVR. Gaing [14] has optional a novel plan technique for formative the PID manager limits of the
AVR system using the PSO method, which is created by social execution styles of creatures such as fish schooling and bird flocking .
On the other hand, neural networks have been extensively used in manage of nonlinear systems and the recognition, estimation [15],
[16]. Neural networks have been deliberate in offline estimation of the value function [17] where NN was trained using smallest
amount square method. In addition, nonlinear H∞ control using RBF-NN has been accounted in [18]. This method is based on the
guess of the value function using nonlinear RBF-NN where the network is trained, offline, using gradient method. Whereas, both GA
and PSO experience from computational load and memory condition and so they are not appropriate for on-line applications. To
conquer the above complexities, this paper suggested adaptive PID controller depends on RBF network identification tuning by
genetic algorithm to obtain optimal PID parameters of an AVR.
T

International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 2
ISSN 2250-3153
www.ijsrp.org
II. RESEARCH MYTHOLOGY
1. Modeling of AVR system
The terminal voltage is kept constant in a synchronous generator, at various levels by using an AVR. The AVR system contained of
four major parts, namely amplifier, exciter, generator, and sensor. Fig.1.It showed the block diagram symbol of the AVR system. A
sensor senses the voltage magnitude; this voltage is contrasted with a dc set point signal to generate the error signal. A PID controller
is used to decrease the error and to get better the dynamic response. The PID manager is a mixture of the proportional, integral and
derivative manage devices that while used jointly efficiently steady the manipulated changeable at the set point. The PID manager
transfer function is given by.
Fig.1. Block diagram of AVR system along with PID controller
sKKsG dp s
K)( i (1)
))(()1)(1)(1)(ss(1
)1)()(K(s)(2
a
d
2
)( ipdsgeasge
sgeaip
sref
t
ksKKsKKKKsss
sKKKKsK
V
sV
(2)
The equation (2) gives transfer function of AVR systems with PID control .The AVR excellence influences the voltage level
throughout steady-state process and reduces the voltage oscillations during fleeting periods, moving the overall system stability.
Optimization of controller parameters Essential for the acceptable operation of the system are good choices of PID controller parameters. Whereas, the problem of PID
controller parameter selection is devised as an optimization difficulty, the object function of which is given by equation (3)
)())(1(),,K( d rsssship tteEOeKKMinF (3)
The ),,K( d ip KKMinF uses a combination of transient response counting overshoot, rise time, settling time and steady-state error. By
choosing the suitable value of the weighting factor , the presentation principle can be made to please the designer requirements. The
following restrictions is subjected to for above optimization problem
maxmin
ppp KKK , maxmin
iii KKK , maxmin
ddd KKK (4)
To look for the best value of the controller limits by applied a RGA to the above optimization difficulty. The presented GA is
specified in the next section.
A. Proposed GA
GAs is search algorithms optimize PID parameters depend on the technicalities of genetics and natural selection. They unite
randomized with solution evaluation, to obtain optimality by structured exchange of information among solutions [19].Preliminary
with a primary population, discovers new individuals by generating offspring using the three genetic operators namely, reproduction,
crossover, and mutation, and the GA used the information involved in the present population which can then replace the members of
the old generation. The algorithm converges to the best chromosome after several generations, which hopefully represents the optimal
or near optimal solution. The transfer functions of AVR components as shown in Table 1.
Table 1. The transfer function of AVR components
component Transfer function Parameter limits
Amplifier sKTF aaamplifier 1/
ss
K
a
a
1<<02.0
40<<10
exciter sKTF eeexciter 1/
ss
K
e
e
1<<4.0
10<<1
generator sKTF gggenerator 1/
gKdepend on the load (0.7-1.0)
ss g 2<<1
sensor sKTF sssensor 1/ ss s .060<<001.0
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 3
ISSN 2250-3153
www.ijsrp.org
1. Reproduction
According to their fitness function as the reproduction method, that stochastically chooses the individuals from the population;
higher the fitness, more chances an individual has to be chosen for the next generation. Present are three main types of selection
methods: ranking method, fitness balanced selection, and contest selection. This work used tournament selection [23]. The best of the
‘n’ is inserted into the new population for additional genetic processing where in contest selection; ‘n’ individuals are selected
randomly from the population. The mating pool is filled by frequent this process. Although larger contests can be used ,contests are
often held between pairs of individuals.
2. Crossover operation
The global search property of the GA is got mostly by crossover operator. The selected probability typically in the range of 0.6–1.0
with, crossover combines substructures of two-parent chromosomes to produce new structures. The created point depends on the
location of both parents is that One interesting feature of crossover operators. The new point will also be close to the parents if both
parents are close to each other. On the other hand, the search is more like a random search, if parents are far from each other [23].
3. Mutation operation
The mutation operator is responsible for novel genetic material inserted into the population. Mutation arbitrarily changes a changeable
with a little likelihood, ‘in this work used uniform mutation’. The variable is set to a consistent random number between the variables
lower and upper limits in consistent mutation.GA implementation for PID controller tuning to obtain the optimum PID manager limits
by applying GA, two major subjects require: Arrangement of the fitness function and symbol of the choice variables.
B. Variable representation
Candidate solutions for everyone in the genetic population are represented. The elements of the solution consist of integral gain,
proportional gain and derivative gain for the PID controller-tuning problem. The proposed GA populations are used floating-point
numbers to represent the variables. The direct representation of the solution variables are used to reduce the computer space required
to store. To increase the efficiency of the GAS there is no need to convert the solution variables to the binary string. Where the value
of a parameter ),,K( p di KK ,(0.6255 ,0.2562,0.1523), that obtained from GA directly tuning to RBF program to got optimum tuning of
PID controller parameter is necessary for thematic factory operation of AVR .
C. Fitness function
The performance of everyone in the population is evaluated according to Fitness’, which is described as the non-negative figure of
value to be maximized. Fitness is linked in a directly with the objective function value. For the difficulty using the limit set by
evaluation of the individual is accomplished by calculating the performance criteria given by equation (3). The consequence of the
presentation criterion computation is used to individual calculate the fitness value. The fitness function is the mutual of the
presentation criterion ),,K( d ip KKF given in equation (3). Hence, the minimization of performance criteria given by (3) is
changed to a fitness function to be maximized as,
ITAEKKF
kFitness
ip *),,K( d
(5)
Where k a constant .ITAE is absolute –error value multiplied by an integral of time. This is used to amplify (1/F) the value of which
is usually small, so that the fitness value of the chromosome should be in a wide variety.
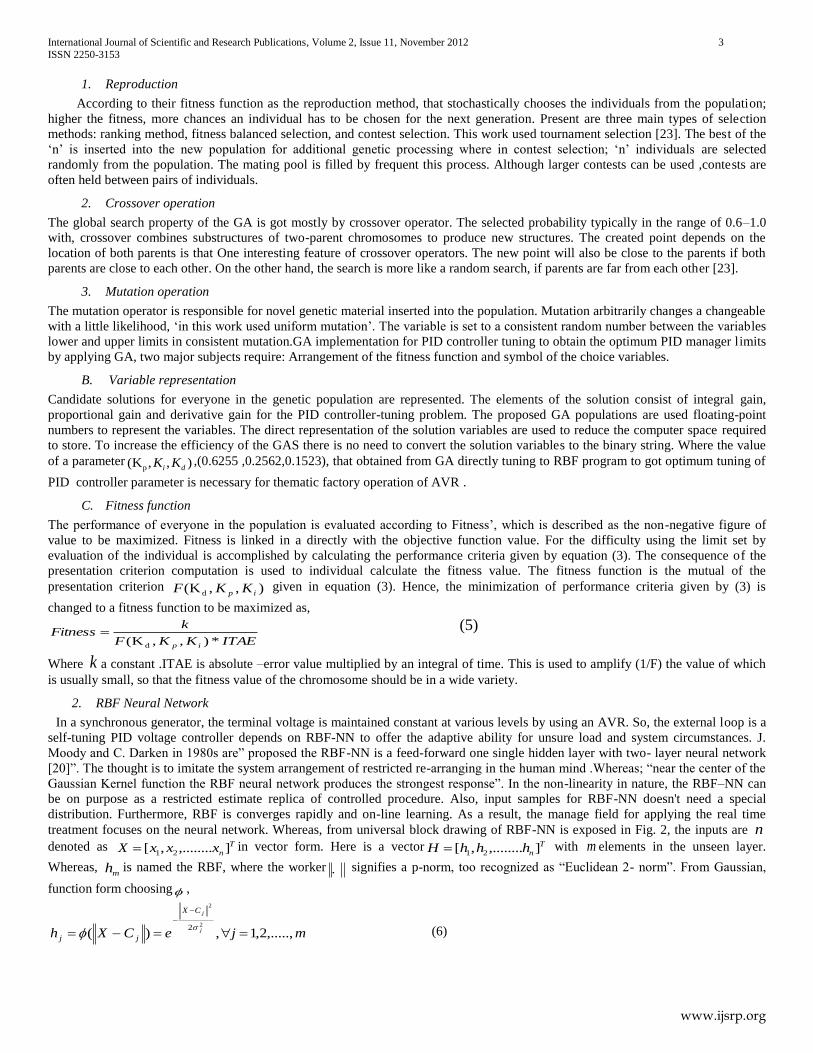
2. RBF Neural Network
In a synchronous generator, the terminal voltage is maintained constant at various levels by using an AVR. So, the external loop is a
self-tuning PID voltage controller depends on RBF-NN to offer the adaptive ability for unsure load and system circumstances. J.
Moody and C. Darken in 1980s are” proposed the RBF-NN is a feed-forward one single hidden layer with two- layer neural network
[20]”. The thought is to imitate the system arrangement of restricted re-arranging in the human mind .Whereas; “near the center of the
Gaussian Kernel function the RBF neural network produces the strongest response”. In the non-linearity in nature, the RBF–NN can
be on purpose as a restricted estimate replica of controlled procedure. Also, input samples for RBF-NN doesn't need a special
distribution. Furthermore, RBF is converges rapidly and on-line learning. As a result, the manage field for applying the real time
treatment focuses on the neural network. Whereas, from universal block drawing of RBF-NN is exposed in Fig. 2, the inputs are n
denoted as T
nxxxX ],........,[ 21 in vector form. Here is a vector T
nhhhH ],........,[ 21 with m elements in the unseen layer.
Whereas, mh is named the RBF, where the worker . signifies a p-norm, too recognized as “Euclidean 2- norm”. From Gaussian,
function form choosing ,
mjeCXh j
jCX
jj ,.....,2,1,)(2
2
2
(6)

International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 4
ISSN 2250-3153
www.ijsrp.org
Where andj named its radius accordingly and the vector T
jnjjJ cccC ],....,,[ 21 is named the node center of basis function. This
is a Gaussian radial-basis function. The output layer is the arranged output _
y .One can deduce that net output_
y should be become as
follows:
)(1
_
j
m
j
j CXwy
(7)
Fig.2. Block diagram of RBF neural network structure
Wherever real number limits jw , mj ,.....,2,1 , are the weights. The error ))()((_
kyky among scheme generates reply )(ky
and RBF-NN output )(_
ky is used to control the net’s limits. Furthermore, the efficiency of this NN is estimated by an execution
function distinct as the square estimate error:
2_
))]()([(2
1kykyJ I (8)
Applied the gradient descent technique to come up with the updating algorithms for output weight, node center
and radius parameter stated as follows:
)]2()1([
))]()([()1()(_
kwkw
hkykykwkw
jj
jjj
(9)
3
2
)]()([_
j
jCX
jjj hwkyky
(10)
)]2()1([)1()( kkkk jjjjj (11)
2
_
)]()([j
jij
jji
cxwkykyc
(12)
)]2()1([)1()( kckcckckc jijijijiji (13)
is specified as the learning rate for the NN whereas , is specified as the impetus factor in that order . The "learning" capability
involved in updating algorithm. The RBF-NN regulating the parameters of PID controllerdip KKK ,, . A short examination of
RBF-PID controller is known as follows; for the unit negative feedback control system can be written the system error )(ke as,
)()()( kykrke (14)
Whereas, )(kr is the reference command. Also, the squared error is defined the efficiency of this adaptive controller and estimated
by a performance function:
)(2
1)( 2 kekE
(15)
In the updating algorithm can be represented the adaptive controller output )(ku as:
)()1()( kukuku )(.)(.)(.)1( kekkekkekku ddiipp (16)
WherepK
dK, and iK are proportional gain, derivative gain, and integral gain respectively. The integral error function )(, kei ,
proportional error function
)(kep and derivative error function
)(ked in that order as follows:
)2()1(2)()( kekekekei (17) , )()( kekep (18), )1()1(2)()( kekekeked
(19)
To derive the regulating rules for thepK
dK, and iK the gradient descent method is applied with the chain rule to minimize the
performance index function )(kE as follows:

International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 5
ISSN 2250-3153
www.ijsrp.org
)(.).(. keu
yke
k
u
u
y
y
E
k
Ek p
pp
p
(20)
)(.).(. keu
yke
k
u
u
y
y
E
k
Ek i
ii
i
(21)
)(.).(. keu
yke
k
u
u
y
y
E
k
Ek d
dd
i
(22)
The sensitivity relating system output )(ky to controller output )(ku by, Jacobean matrix u
y
and, is the learning rate for the
adaptive PID algorithm. The inputs, output response are three inputs in the RBF algorithm, output reply )(1 kyx delayed output
reply )1(2 kyx , and manager output )(3 kux . The manufactured output )(_
ky of RBF-NN will come close to the system
output )(ky after on-line learning. Therefore)(
)(_
ku
ky
, is extremely close to)(
)(
ku
ky
and one can deduce from (9) and (10)
, 2
2
2
133
_
)(
)(j
jCX
m
j
jewxx
y
ku
ky
)
2(
2
2
31 j
j
j
m
j
j
CX
xhw
)2
(2
31 j
j
T
j
T
jj
TT
j
m
j
j
CCXCCXXX
xhw
(23)
, )2
22(
2
33
1 j
j
j
m
j
j
cxhw
,2
3
1
)(
j
j
j
m
j
j
kuchw
,
Thus, the updating technique for the adaptive PID depends on RBF-NN should be getting as:
2
3
1
)().().(.
j
j
j
m
j
jpp
kuchwkekek
(24) 2
3
1
)().().(.
j
j
j
m
j
jii
kuchwkekek
(25)2
3
1
)().().(.
j
j
j
m
j
jdd
kuchwkekek
(26)
The PID parameters pK dK, and
iK are mechanically readjusted through on-line learning technique of RBF-NN and (24)-(26) to
remain the system error )(, ke zero.
III. SIMULATION RESULTS
A. Performance of GA–PID controller
To get the optimum PID controller parameters by apply the proposed GA. The presented GA was written in MATLAB and executed
on a laptop Intel core(TM) two Duo CPU [email protected] and 3GB. The primary population is produce randomly among the
variable’s lower and upper restrictions. The fitness function given by equation (5) is used to evaluate the fitness value of each set of
controller parameters. Simulation was conducted with different values of. The various values of crossover and mutation likelihoods in
the ranges 0.6–1.0and 0.001–0.1 to performance for GA, in that order, were evaluated the top consequences are obtained with the
following control parameters. Number of generations: 75, Population size: 30, Crossover probability: 0.6, Mutation probability: 0.001.
The GA took 33.72s to reach the optimum answer. The convergence characteristics of GA algorithm explain in Fig. 3.
Fig. 3. Shows the convergence characteristics of GA algorithm
The GA concentrates mainly on finding feasible solutions to the problem during this stage. Whereas, the value rises gradually and
settles down near the optimum value with best of the individuals in the population achieving that point. The optimal values of the
controller parameters obtained using the presented GA for different values are given in Table 2.
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 6
ISSN 2250-3153
www.ijsrp.org
Table 2. Optimal value the controller parameter obtained using the proposed GA
The AVR system consists of
generator, exciter, amplifier, and sensor. The parameters of the AVR system are selected as
0.1,01.0,4.0,1.0,0.1,10 gseasgea andKKKK
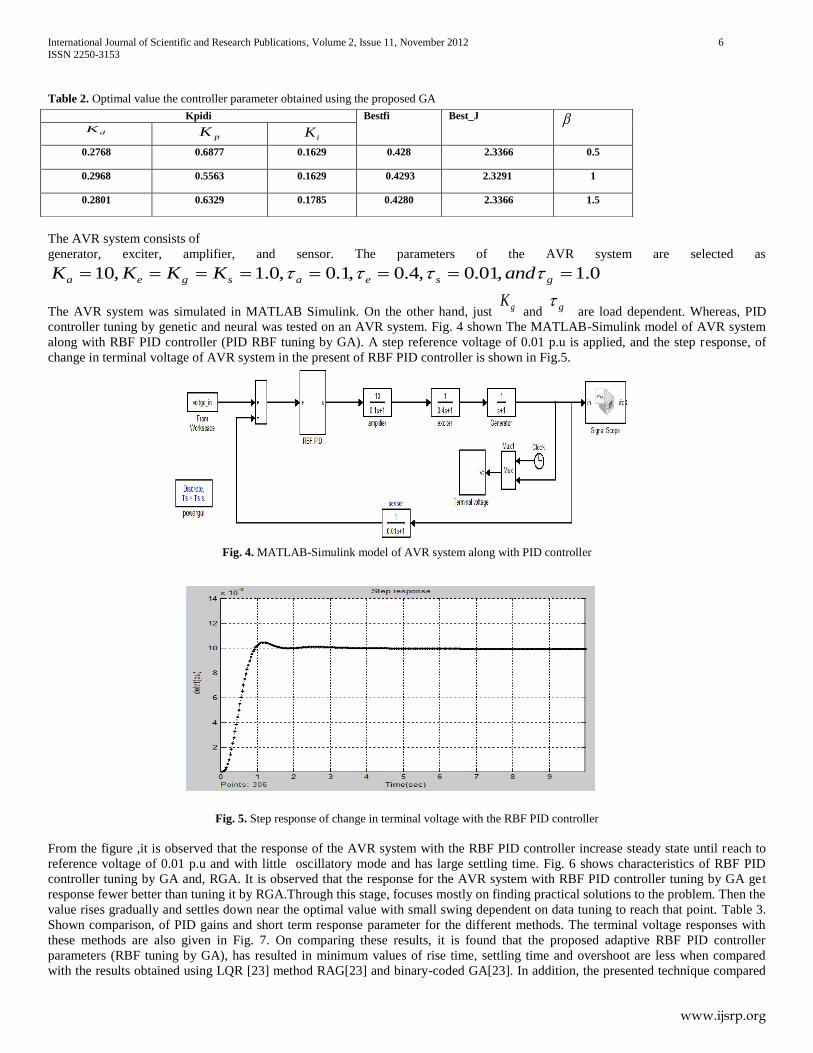
The AVR system was simulated in MATLAB Simulink. On the other hand, just gK and g are load dependent. Whereas, PID
controller tuning by genetic and neural was tested on an AVR system. Fig. 4 shown The MATLAB-Simulink model of AVR system
along with RBF PID controller (PID RBF tuning by GA). A step reference voltage of 0.01 p.u is applied, and the step response, of
change in terminal voltage of AVR system in the present of RBF PID controller is shown in Fig.5.
Fig. 4. MATLAB-Simulink model of AVR system along with PID controller
Fig. 5. Step response of change in terminal voltage with the RBF PID controller
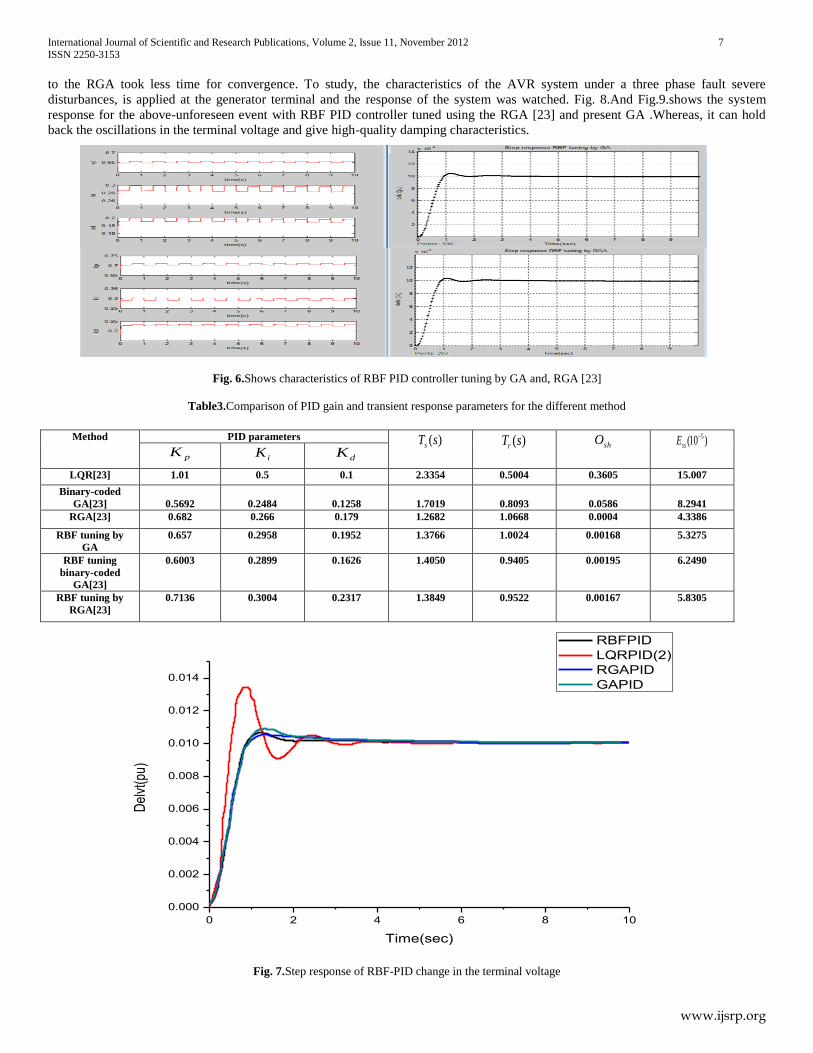
From the figure ,it is observed that the response of the AVR system with the RBF PID controller increase steady state until reach to
reference voltage of 0.01 p.u and with little oscillatory mode and has large settling time. Fig. 6 shows characteristics of RBF PID
controller tuning by GA and, RGA. It is observed that the response for the AVR system with RBF PID controller tuning by GA get
response fewer better than tuning it by RGA.Through this stage, focuses mostly on finding practical solutions to the problem. Then the
value rises gradually and settles down near the optimal value with small swing dependent on data tuning to reach that point. Table 3.
Shown comparison, of PID gains and short term response parameter for the different methods. The terminal voltage responses with
these methods are also given in Fig. 7. On comparing these results, it is found that the proposed adaptive RBF PID controller
parameters (RBF tuning by GA), has resulted in minimum values of rise time, settling time and overshoot are less when compared
with the results obtained using LQR [23] method RAG[23] and binary-coded GA[23]. In addition, the presented technique compared
Kpidi Bestfi Best_J
dK pK iK
0.2768 0.6877 0.1629 0.428 2.3366 0.5
0.2968 0.5563 0.1629 0.4293 2.3291 1
0.2801 0.6329 0.1785 0.4280 2.3366 1.5
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 7
ISSN 2250-3153
www.ijsrp.org
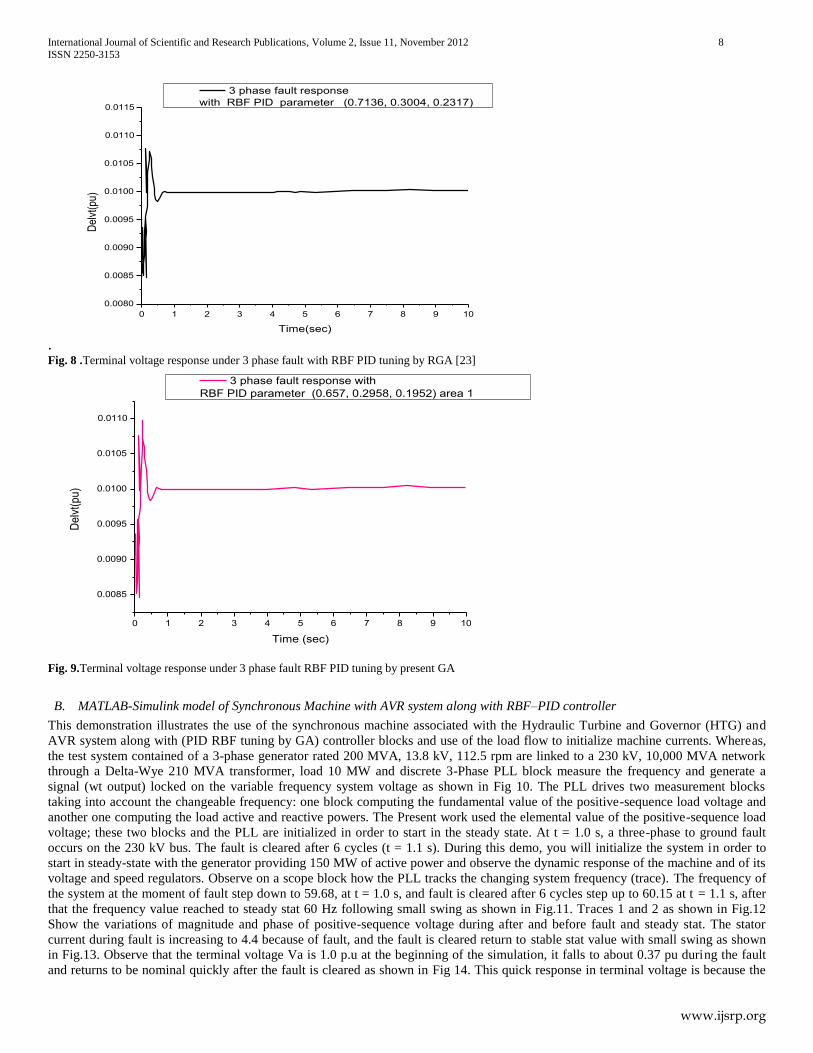
to the RGA took less time for convergence. To study, the characteristics of the AVR system under a three phase fault severe
disturbances, is applied at the generator terminal and the response of the system was watched. Fig. 8.And Fig.9.shows the system
response for the above-unforeseen event with RBF PID controller tuned using the RGA [23] and present GA .Whereas, it can hold
back the oscillations in the terminal voltage and give high-quality damping characteristics.
Fig. 6.Shows characteristics of RBF PID controller tuning by GA and, RGA [23]
Table3.Comparison of PID gain and transient response parameters for the different method
0 2 4 6 8 10
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
Del
vt(p
u)
Time(sec)
RBFPID
LQRPID(2)
RGAPID
GAPID
Fig. 7.Step response of RBF-PID change in the terminal voltage
Method PID parameters )(sTs )(sTr shO
)10( 5
ssE
pK iK
dK
LQR[23] 1.01 0.5 0.1 2.3354 0.5004 0.3605 15.007
Binary-coded
GA[23]
0.5692
0.2484
0.1258
1.7019
0.8093
0.0586
8.2941
RGA[23] 0.682 0.266 0.179 1.2682 1.0668 0.0004 4.3386
RBF tuning by
GA
0.657 0.2958 0.1952 1.3766 1.0024 0.00168 5.3275
RBF tuning
binary-coded
GA[23]
0.6003 0.2899 0.1626 1.4050 0.9405 0.00195 6.2490
RBF tuning by
RGA[23]
0.7136 0.3004 0.2317 1.3849 0.9522 0.00167 5.8305
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 8
ISSN 2250-3153
www.ijsrp.org
.
0 1 2 3 4 5 6 7 8 9 10
0.0080
0.0085
0.0090
0.0095
0.0100
0.0105
0.0110
0.0115
Del
vt(p
u)
Time(sec)
3 phase fault response
with RBF PID parameter (0.7136, 0.3004, 0.2317)
Fig. 8 .Terminal voltage response under 3 phase fault with RBF PID tuning by RGA [23]
0 1 2 3 4 5 6 7 8 9 10
0.0085
0.0090
0.0095
0.0100
0.0105
0.0110
De
lvt(
pu
)
Time (sec)
3 phase fault response with
RBF PID parameter (0.657, 0.2958, 0.1952) area 1
Fig. 9.Terminal voltage response under 3 phase fault RBF PID tuning by present GA
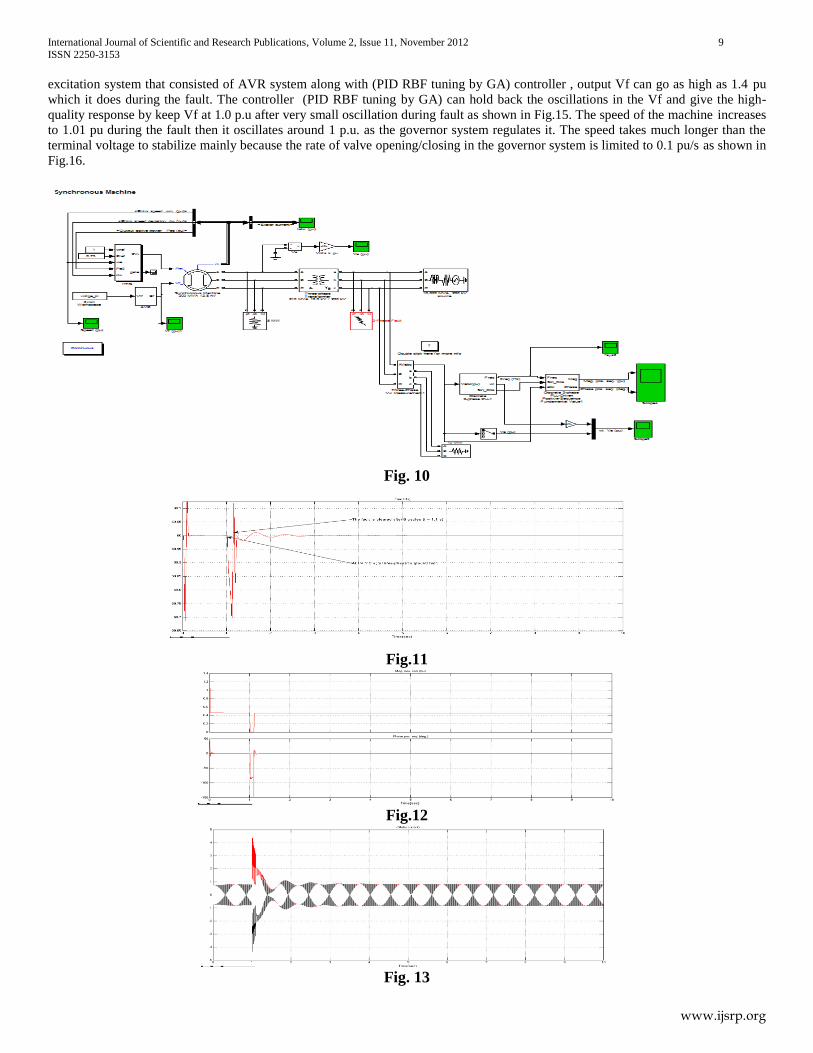
B. MATLAB-Simulink model of Synchronous Machine with AVR system along with RBF–PID controller
This demonstration illustrates the use of the synchronous machine associated with the Hydraulic Turbine and Governor (HTG) and
AVR system along with (PID RBF tuning by GA) controller blocks and use of the load flow to initialize machine currents. Whereas,
the test system contained of a 3-phase generator rated 200 MVA, 13.8 kV, 112.5 rpm are linked to a 230 kV, 10,000 MVA network
through a Delta-Wye 210 MVA transformer, load 10 MW and discrete 3-Phase PLL block measure the frequency and generate a
signal (wt output) locked on the variable frequency system voltage as shown in Fig 10. The PLL drives two measurement blocks
taking into account the changeable frequency: one block computing the fundamental value of the positive-sequence load voltage and
another one computing the load active and reactive powers. The Present work used the elemental value of the positive-sequence load
voltage; these two blocks and the PLL are initialized in order to start in the steady state. At t = 1.0 s, a three-phase to ground fault
occurs on the 230 kV bus. The fault is cleared after 6 cycles (t = 1.1 s). During this demo, you will initialize the system in order to
start in steady-state with the generator providing 150 MW of active power and observe the dynamic response of the machine and of its
voltage and speed regulators. Observe on a scope block how the PLL tracks the changing system frequency (trace). The frequency of
the system at the moment of fault step down to 59.68, at t = 1.0 s, and fault is cleared after 6 cycles step up to 60.15 at t = 1.1 s, after
that the frequency value reached to steady stat 60 Hz following small swing as shown in Fig.11. Traces 1 and 2 as shown in Fig.12
Show the variations of magnitude and phase of positive-sequence voltage during after and before fault and steady stat. The stator
current during fault is increasing to 4.4 because of fault, and the fault is cleared return to stable stat value with small swing as shown
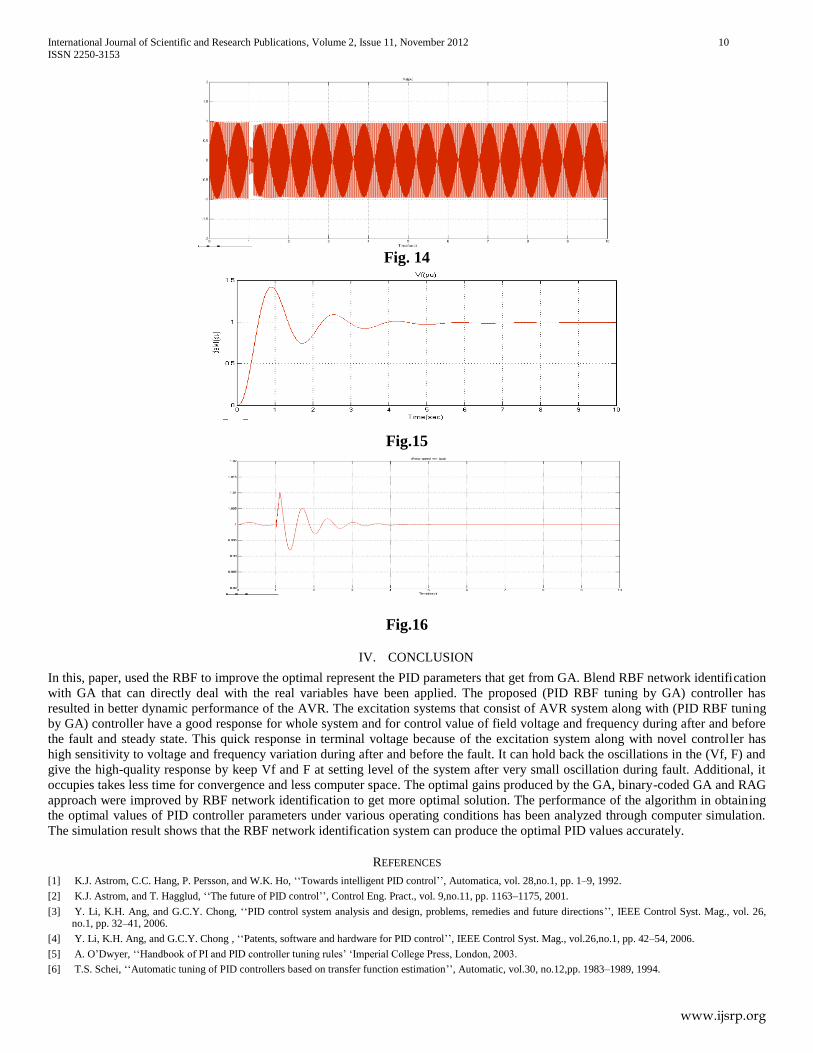
in Fig.13. Observe that the terminal voltage Va is 1.0 p.u at the beginning of the simulation, it falls to about 0.37 pu during the fault
and returns to be nominal quickly after the fault is cleared as shown in Fig 14. This quick response in terminal voltage is because the
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 9
ISSN 2250-3153
www.ijsrp.org
excitation system that consisted of AVR system along with (PID RBF tuning by GA) controller , output Vf can go as high as 1.4 pu
which it does during the fault. The controller (PID RBF tuning by GA) can hold back the oscillations in the Vf and give the high-
quality response by keep Vf at 1.0 p.u after very small oscillation during fault as shown in Fig.15. The speed of the machine increases
to 1.01 pu during the fault then it oscillates around 1 p.u. as the governor system regulates it. The speed takes much longer than the
terminal voltage to stabilize mainly because the rate of valve opening/closing in the governor system is limited to 0.1 pu/s as shown in
Fig.16.
Fig. 10
Fig.11
Fig.12
Fig. 13
International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 10
ISSN 2250-3153
www.ijsrp.org
Fig. 14
Fig.15
Fig.16
IV. CONCLUSION
In this, paper, used the RBF to improve the optimal represent the PID parameters that get from GA. Blend RBF network identification
with GA that can directly deal with the real variables have been applied. The proposed (PID RBF tuning by GA) controller has
resulted in better dynamic performance of the AVR. The excitation systems that consist of AVR system along with (PID RBF tuning
by GA) controller have a good response for whole system and for control value of field voltage and frequency during after and before
the fault and steady state. This quick response in terminal voltage because of the excitation system along with novel controller has
high sensitivity to voltage and frequency variation during after and before the fault. It can hold back the oscillations in the (Vf, F) and
give the high-quality response by keep Vf and F at setting level of the system after very small oscillation during fault. Additional, it
occupies takes less time for convergence and less computer space. The optimal gains produced by the GA, binary-coded GA and RAG
approach were improved by RBF network identification to get more optimal solution. The performance of the algorithm in obtaining
the optimal values of PID controller parameters under various operating conditions has been analyzed through computer simulation.
The simulation result shows that the RBF network identification system can produce the optimal PID values accurately.
REFERENCES
[1] K.J. Astrom, C.C. Hang, P. Persson, and W.K. Ho, ‘‘Towards intelligent PID control’’, Automatica, vol. 28,no.1, pp. 1–9, 1992.
[2] K.J. Astrom, and T. Hagglud, ‘‘The future of PID control’’, Control Eng. Pract., vol. 9,no.11, pp. 1163–1175, 2001.
[3] Y. Li, K.H. Ang, and G.C.Y. Chong, ‘‘PID control system analysis and design, problems, remedies and future directions’’, IEEE Control Syst. Mag., vol. 26, no.1, pp. 32–41, 2006.
[4] Y. Li, K.H. Ang, and G.C.Y. Chong , ‘‘Patents, software and hardware for PID control’’, IEEE Control Syst. Mag., vol.26,no.1, pp. 42–54, 2006.
[5] A. O’Dwyer, ‘‘Handbook of PI and PID controller tuning rules’ ‘Imperial College Press, London, 2003.
[6] T.S. Schei, ‘‘Automatic tuning of PID controllers based on transfer function estimation’’, Automatic, vol.30, no.12,pp. 1983–1989, 1994.

International Journal of Scientific and Research Publications, Volume 2, Issue 11, November 2012 11
ISSN 2250-3153
www.ijsrp.org
[7] F.G. Shinskey, Process control system: application, design and tuning.New York:McGraw-Hill, 4th edn. 1996.
[8] M. Morari, and E. Zufiriou, Robust process control. Prentice-Hall Inc., Englewood Cliffs, NJ, 1987.
[9] G.R. Yu,and R.C. Hwang, ‘‘Optimal PID speed control of brushless DC motors using LQR approach’’. IEEE Int. Conf.Syst., Man Cybern., pp. 473–478, 2004.
[10] A. Visioli, ‘‘Tuning of PID controllers with fuzzy logic’’,Proc. Inst. Electron. Eng. Control Theory Appl., vol.148,no.1, pp. 1–8, 2001.
[11] R.A. Krohling, and J.P. Rey, ‘‘Design of optimal disturbance rejection PID controllers using genetic algorithm’’, IEEE Trans. Evol. Comput., vol.5,no.1, pp. 78–82 , 2001.
[12] K. Valarmathi, D. Devaraj, and T.K. Radhakrishnan, ‘‘Enhanced genetic algorithm based proportional integral controller tuning for pH process’’, Instrument. Sci. Technol., vol.35,no.6, pp. 619–635 , 2007.
[13] D.H. Kim, A. Abraham, and J.H. Cho, ‘‘A hybrid genetic algorithm and bacterial foraging approach for global optimization’’, Int. J. Inf. Sci., vol. 177,no.18, pp. 3918–3937, 2007.
[14] Z.L. Gaing, ‘‘A particle swarm optimization approach for optimum design of PID controller in AVR system’’, IEEE Trans. Energy Convers., vol. 19, no.2, pp. 384–391, 2004.
[15] F. Pourboghrat, H.Pongpairoj, Ziqian Liu,and F.Farid., ‘‘ Dynamic neural Networks for modeling and control of nonlinear systems’’, IntelligentAutomation and soft computing, vol.9,no.2,pp.: 61-70 ,2003.
[16] F.C. Chen, C. Liu., ‘‘ Adaptively controlling nonlinear continuous-time systems using multilayer neural networks,’’in Proc IEEE Transactions onAutomatic Control,vol.39,no.6,pp.: 1306-1310, 1994.
[17] FL Lewis, M Abu-Khalaf., ‘‘ A Hamilton-Jacobi setup for constrained neural network control’’,in Proc. IEEE Inter.Symp. Intell. Contr.,pp. 1-15, 2003.
[18] M.S.Ahmed “Neural controllers for nonlinear state feedback L2- gain control” IEE Proceedings of Control Theory Applications,vol.147,no.3, 2000.
[19] D. Goldberg., ‘‘Genetic algorithms in search, optimization and machine learning’’, Addison-Wesley, 1989.
[20] J. Moody and C. Darken, "Learning with Localized Receptive Fields," Proceedings of the 1988 Connectionist Models Summer School, pp. 133-143, 1988.
[21] P. Kundur, Power System Stability and Control, McGraw-Hill, Example 12.6, pp. 813, 1994.
[22] Klein, Rogers, Moorty and Kundur: "Analytical investigation of factors influencing PSS performance," IEEE Trans. on EC, Vol. 7 , No 3, September 1992, pp.382-390
[23] D.Devaraj, and B.Selvabala,‘‘real-coded gentic algorithm and fuzzy logic approach for real-time tuning of proportional –intrgral-derivative controller in automatic voltge regulator system,’’IET Gener .Transm.Distrib.,Vol.3,Iss.7,pp.641-649,2009.
First Author – Mohd Wazir Mustafa received his B. Eng Degree (1988), M. Sc. (1993) and PhD (1997) from university of Strathclyde. He is currently an
Associate Professor and Deputy Dean (Graduate Studies and Research) at Faculty of Electrical Engineering, UTM, Johor Bahru, Malaysia. He research interest includes power system stability, FACTS and power system distribution automation, de-regulated power system, etc. He is a member of IEEE. (Email: [email protected]).
Second Author – Abdullah Jubair Halboos Al Gizi received his B. Eng Degree (1995), M. Sc. (2003) from University of Technology
Baghdad. He is currently a PhD student at Faculty of Electrical Engineering, UTM, Johor Bahru, Malaysia. (E-mail: abdullh969@ yahoo.com).
Third Author – Malik A. Alsaedi [email protected]
Correspondence Author – 1 Corresponding author: Fax: +60162410406 ,E-mail addresses: abdullh969@ yahoo.com(Abdullah J. Al Gizi)


![Pi Pid Controller[eBook.veyq.Ir]](https://static.fdocuments.us/doc/165x107/577cd44b1a28ab9e789821ba/pi-pid-controllerebookveyqir.jpg)















