
The paradox behind the pattern of rapid adaptive radiation ...
Upload
bobby-siswantoCategory
view
228download
0
7/27/2019 Adaptive Multiple Subtraction With a Pattern-Based Technique
http://slidepdf.com/reader/full/adaptive-multiple-subtraction-with-a-pattern-based-technique 1/4
Adaptive Multiple Subtraction with a Pattern-based Technique Jiuying Guo*, Veritas DGC Inc
Summary
A pattern-based adaptive multiple subtraction technique is presented in this paper. It jointly uses the primary
prediction error filter(PEF) and its projection signal filter that is signal preserved as the constraints to calculate theadaptive matching filter in f-x domain. Both synthetic andreal data tests show its effectiveness.
Introduction
Surface-related multiple elimination(SRME) (Berkhout,
1982; Verschuur et al, 1992) has been an effectivealgorithm to remove multiples that are difficult to eliminateusing other conventional algorithms. SRME has two steps.The first step is multiple prediction, and the second step is
multiple adaptive subtraction. In the first step, the multiplemodel is constructed by 2D convolutions of the seismicdata without knowledge of the subsurface structures, and itcan handle complex structures. In reality, however,
variations in the acquisition wavelet, cable feathering, dipin crossline direction, boundary effect, limited offset rangecan introduce time shifts or amplitude artifacts into the
predicted multiples. Consequently, there are discrepancies between the real multiples and the predicted multiples. The
second step takes them into account. Conventional methodto do this is to apply a matching filter in t-x domain to the
predicted multiples, and then subtract the match-filtered
multiples from the seismic data. This matching filter iscalculated by a least squares algorithm. Unfortunately,when multiples strongly interfere with primaries, these
methods give biased primaries after subtraction.
Spitz(1999) presented a pattern-based algorithm, which is based on the popular assumption that the primaries and
multiples are predictable in f-x domain. It uses the prediction error filter(PEF) of the primaries as the
constraints of minimization to reduce the freedom of thesubtraction. This algorithm has proved to be particularlyefficient when attenuating the multiples in the mostcomplex structure areas where the multiples strongly
interfere with the primaries. Guitton et al(2001) introduceda similar algorithm in t-x domain. Abma et al (2002) madecomparisons of different adaptive subtraction techniques.However, in reality, the effectiveness of Spitz’s approach is
still somewhat limited when multiples are not perfectly predictable and strong random noises exist in the seismicdata.
In this paper, a more effective approach is presented. Itcalculates the matching filter by iteratively applying both
primary PEF and projection signal filter(Soubaras, 1994) as
the pattern constraints to the LSQR. Both synthetic and realdata tests show the results are encouraging.
Theory
• Surface-related multiple elimination
The first step of SRME is to predict the multiples based onthe feedback model. Its matrix notation is
( ) ( ) ......32
+−+−=∆ PPBPPBPBPPP (1)
B (2)11 −∧−= DR S
where is the input data, ∆ is the multiple-free data,
and is the seismic wavelet vector, is the receiver
matrix,
P P
S D∧R is the downward reflection matrix of the
surface.
The matrix multiplications are 2D convolution of the datawith itself in t-x domain. Due to various limitations, thereare discrepancies between the predicted multiples and the
real multiples as previously discussed. A matching filter has to be used to adaptively subtract the multiples.Unfortunately, when primaries strongly interfere withmultiples, conventional adaptive subtraction algorithms
give biased primaries. In order to solve the problem, aneffective algorithm is presented in this paper.
• Adaptive multiple subtraction using a pattern-based
technique
Linear events in f-x domain are predictable. A locally linear
event can be described by a local plane differentialequation
0=∂
∂+
∂
∂
t
P
x
P γ (3)
where ( )t x P , is the wavefield, and γ is local plane wave
slope. If γ is constant, the Fourier transform of (3) is
0ˆˆ
=+ P idx
P d γ ω (4)
The general solution of equation (4) is
( ) ( ) xie P x P
ωγ 0ˆˆ = (5)

7/27/2019 Adaptive Multiple Subtraction With a Pattern-Based Technique
http://slidepdf.com/reader/full/adaptive-multiple-subtraction-with-a-pattern-based-technique 2/4
Adaptive multiple subtraction with a pattern-based technique
where P ˆ is the Fourier transform of P . From (5), we can
easily see the predictability of the local linear event in f-x
domain. The prediction filter is , and its
corresponding PEF is
xie ωγ
( ) xie ωγ −,1 . For multi-events with
different slopes, the PEF is obtained by cascading severaltwo-term filters, and it can be represented by a polynomial.
The coefficients of the polynomial are the coefficients of
the data PEF . The Z transform of has the formd A d A
(6)(∏=
−=ld
j
jd d z z z A1
,)( )
( ) z Ad
( ) z A p
( ) z Ad
can be factored to the product of primary PEF
and multiple PEF . We can calculate
from the data, and from the predicted
multiples.
( ) z Am
( ) z Am
(7)( ) ( ) ( ) z A z A z A m pd =
where ( ) ( )∏=
−=
lp
j
j p p z z z A1
,
( ) ( )∏=
−=lm
j
jmm z z z A1
,
lmlpld +=
( ) z A p
can be obtained by deconvolving the ( ) z Ad with
.( ) z Am
The second step of SRME is adaptive multiple subtraction.Conventional way calculates the matching filter byminimizing the energy of the primaries. It can be
formulated as
Mf (8)0≈− P
(9)( ) PMMMf T T 1ˆ −
=
where is the matrix of multiples, f is the matrix of matching filters, f is the LSQR solution, and is thematrix of input data,
Mˆ P
T denotes the conjugate transpose.
When primaries strongly interfere with multiples, thisalgorithm gives biased primaries after subtraction. In order
to solve the problem linked with the standard LSQR
subtraction, Spitz proposed a method that uses the predicted multiple model as the input pattern. Then,
everything that resembles this pattern within a given subsetis subtracted from the data. This approach can be
formulated as
( ) 0≈− PMf A p(10)
( ) PAAMMAAM p
T
p
T
p
T
p
T 1ˆ −
=f (11)
where is the matrix of the primary PEFs. pA
The real data is always contaminated by additive randomnoises. In order to attenuate these noises, a signal-
preserving algorithm based on a projection filter wasintroduced(Soubaras,1994). In addition, multiples are notalways perfectly predictable in f-x domain. In order to
solve these problems, an algorithm that iteratively and jointly uses the primary PEF and the projection signal filter as the constraints in the minimization is proposed here.
Iteratively calculating the primary PEF can handle the problem when the multiples are not perfectly predictable,and using the projection signal filter can reduce the effectsof the additive random noises while preserving signals.This process can be formulated as
( ) 0≈− PMf BA p p(12)
( ) PBAABMMBAABMf p p
T
p
T
p
T
p p
T
p
T
p
T 1ˆ −
= (13)
where the matrix of projection signal filters is pB
( )22 −
+= IAAIB ε ε T
p p p
1,ε is a pre-whitening constant.
Examples
Both synthetic datasets (Courtesy of BP) and real datasets
have been successfully tested using this new algorithm. Fig.1 shows one flat primary event and two dipping multipleevents with different amplitudes. The amplitude of thesteepest event is twice of that of the other dipping event.
Fig. 2 shows the two dipping events that corresponding tothe multiples to be eliminated from the data. Fig. 3 showsthe result of the standard adaptive subtraction, which tellsus the multiples are only partially eliminated. Fig. 4 shows
the result of the new algorithm, which indicates that thetwo dipping events have been successfully removed. Fig. 5shows the events subtracted by the new algorithm. Fig. 6
shows the second synthetic data that consists of ahorizontal primary event, and a curved-multiple event. Fig.7 shows the predicted multiple that is slightly shifted with
respect to the curved event in Fig. 6. Fig. 8 is the result of

7/27/2019 Adaptive Multiple Subtraction With a Pattern-Based Technique
http://slidepdf.com/reader/full/adaptive-multiple-subtraction-with-a-pattern-based-technique 3/4
Adaptive multiple subtraction with a pattern-based technique
Spitz’s algorithm. It indicates that the primary is alsoattenuated due to that the curved event is not perfectly
predictable. Fig. 9 shows the events subtracted from thedata by Spitz’s algorithm. It’s obviously not what we
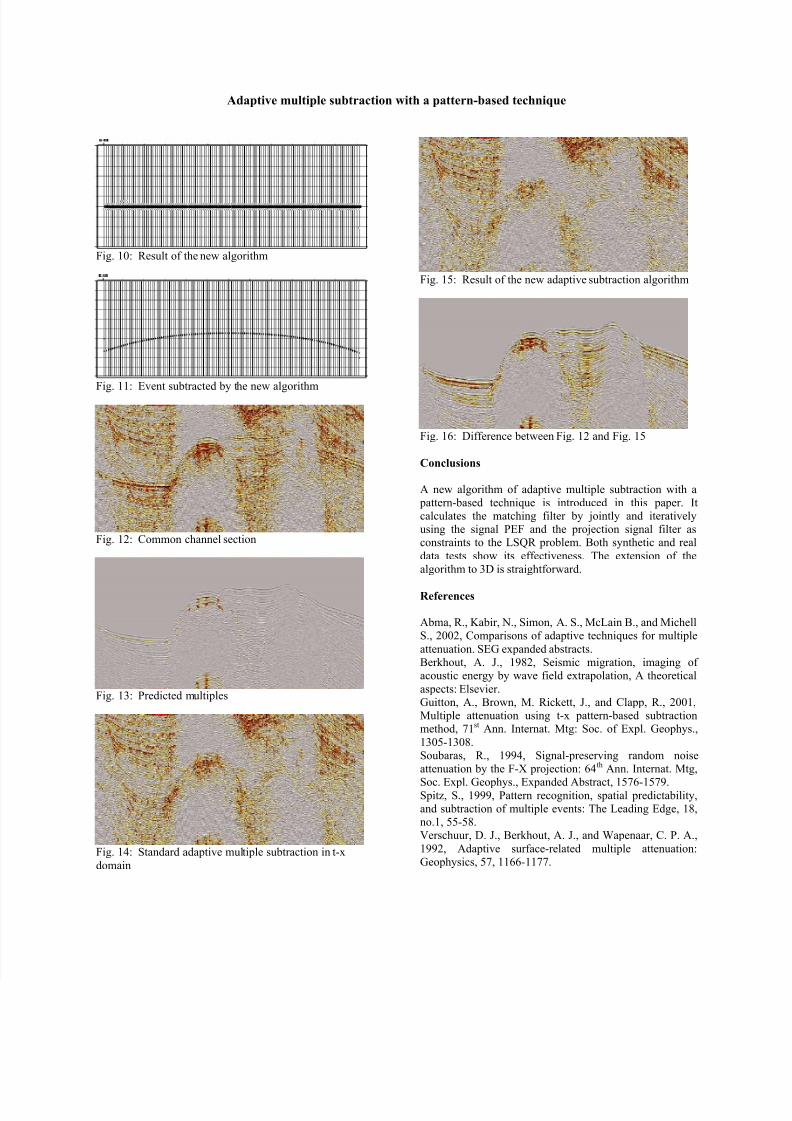
expected. Fig. 10 shows the result of the new algorithm.Clearly the multiples have been almost completelyremoved. Fig. 11 shows the events subtracted by the newalgorithm. Fig. 12 shows a common channel section with
multiples. Fig. 13 shows the predicted multiples. Fig. 14shows the result of standard adaptive multiple subtractionin t-x domain. We can see some residual multiples stillexist. Fig. 15 shows the result of the new algorithm. There
are no noticeable residual multiples. Fig. 16 shows thedifference between Fig.12 and Fig.15. It’s obvious that themultiples are almost perfectly removed.
Fig. 5: Events subtracted by the new algorithm
Fig. 6: Data
Fig. 1: Data
Fig. 7: Model(multiple)
Fig. 2: Model(multiples)
Fig. 8: Result of Spitz’s algorithm
Fig. 3: Result of standard adaptive subtraction
Fig. 9: Events subtracted by Spitz’s algorithm
Fig. 4: Result of the new algorithm
7/27/2019 Adaptive Multiple Subtraction With a Pattern-Based Technique
http://slidepdf.com/reader/full/adaptive-multiple-subtraction-with-a-pattern-based-technique 4/4
Adaptive multiple subtraction with a pattern-based technique
Fig. 10: Result of the new algorithm
Fig. 15: Result of the new adaptive subtraction algorithm
Fig. 11: Event subtracted by the new algorithm
Fig. 16: Difference between Fig. 12 and Fig. 15
Conclusions
A new algorithm of adaptive multiple subtraction with a pattern-based technique is introduced in this paper. Itcalculates the matching filter by jointly and iterativelyusing the signal PEF and the projection signal filter asconstraints to the LSQR problem. Both synthetic and real
data tests show its effectiveness. The extension of thealgorithm to 3D is straightforward.
Fig. 12: Common channel section
References
Abma, R., Kabir, N., Simon, A. S., McLain B., and MichellS., 2002, Comparisons of adaptive techniques for multiple
attenuation. SEG expanded abstracts.Berkhout, A. J., 1982, Seismic migration, imaging of acoustic energy by wave field extrapolation, A theoretical
aspects: Elsevier.Fig. 13: Predicted multiples
Guitton, A., Brown, M. Rickett, J., and Clapp, R., 2001,Multiple attenuation using t-x pattern-based subtractionmethod, 71st Ann. Internat. Mtg: Soc. of Expl. Geophys.,
1305-1308.Soubaras, R., 1994, Signal-preserving random noiseattenuation by the F-X projection: 64th Ann. Internat. Mtg,
Soc. Expl. Geophys., Expanded Abstract, 1576-1579.Spitz, S., 1999, Pattern recognition, spatial predictability,and subtraction of multiple events: The Leading Edge, 18,no.1, 55-58.Verschuur, D. J., Berkhout, A. J., and Wapenaar, C. P. A.,
1992, Adaptive surface-related multiple attenuation:Geophysics, 57, 1166-1177.
Fig. 14: Standard adaptive multiple subtraction in t-x
domain


















