ENGR 340 Wind Energy & Transportation (Part II) Nadia Gkritza CCEE 09-29-2011.
date post
19-Dec-2015Category
view
218download
0

Team 3: Calvin CruiseAdaptive Cruise Control
SystemENGR 340
May 1, 2007
Relieving Highway Driving Frustration
Outline
Introduction of Project Current Results Costs Conclusion Questions
Introduction • Results • Costs • Conclusion • Questions
INTRODUCTION OF PROJECT

Introduction – The Team
Nate Sportel • Erik Barton • Bryan Bandstra • Chris Vonk • Nate Barker
Introduction • Results • Costs • Conclusion • Questions
Introduction – Project Overview
Detects the distance and speed of forward vehicles
Changes the cruise speed of the equipped vehicle
Information displayand push buttoninterface
Design an Adaptive Cruise Control System
Introduction • Results • Costs • Conclusion • Questions
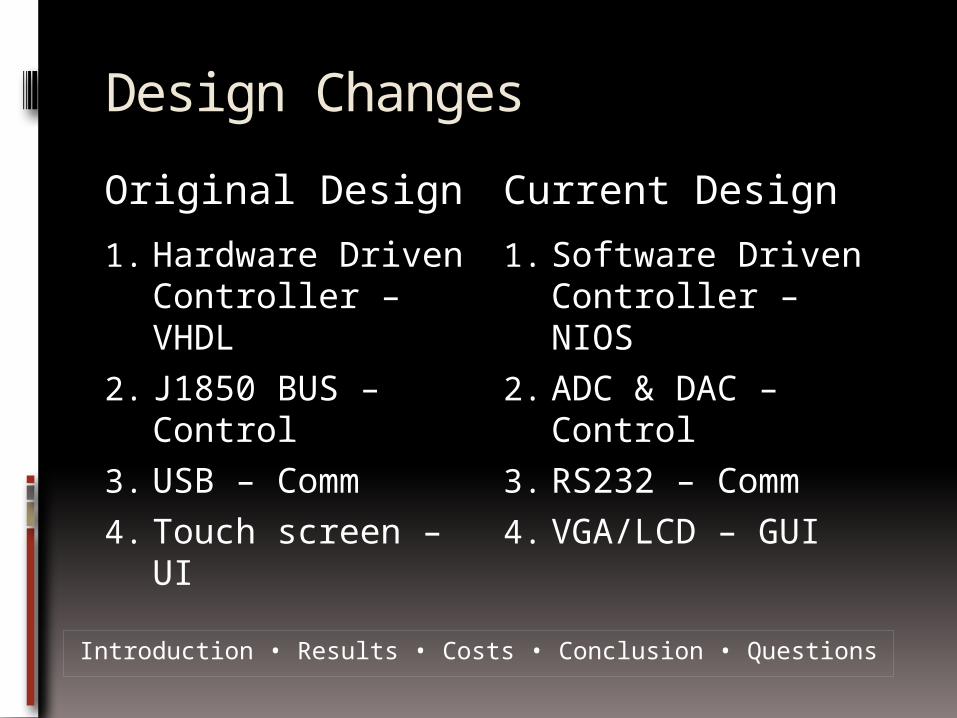
Design Changes
Original Design Current Design
1. Hardware Driven Controller – VHDL
2. J1850 BUS – Control
3. USB – Comm
4. Touch screen – UI
1. Software Driven Controller – NIOS
2. ADC & DAC – Control
3. RS232 – Comm
4. VGA/LCD – GUI
Introduction • Results • Costs • Conclusion • Questions

CURRENT RESULTS
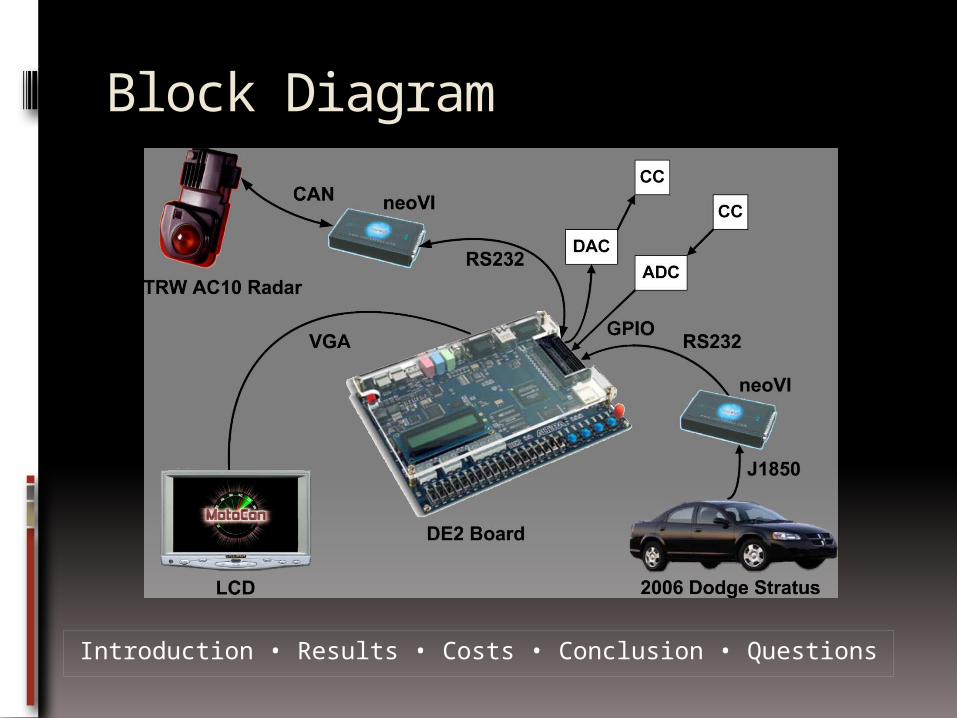
Block Diagram
Introduction • Results • Costs • Conclusion • Questions
Completed Components
ADC Interrupts sytem
DAC Controls car cruise system
Introduction • Results • Costs • Conclusion • Questions

Completed Components
Introduction • Results • Costs • Conclusion • Questions
Completed Components
Presents:
Introduction • Results • Costs • Conclusion • Questions
Introduction • Results • Costs • Conclusion • Questions
Completed Components
Controller Software – written and tested
Radar Successfully tested with PC terminal,
Vehicle Spy
Introduction • Results • Costs • Conclusion • Questions
Completed Components
J1850 Successfully tested with PC terminal,
Vehicle Spy Interrupts
Handled and functional LCD Screen
Works on DE2 board Displays the speed/distance of vehicles ahead Displays the user set time for following
distance Allows user to change following distance
using switches
Introduction • Results • Costs • Conclusion • Questions
Completed Components
RS232 Hardware fully functional
Terminal, neoVI, RXD/TXD, RTS/CTS neoVI
RAW API opened and communications with external devices (car, radar)
VGA Can write to screen using hardware
Timer Timer interrupt functional (at 20 ms)
Introduction • Results • Costs • Conclusion • Questions
Work in Progress Components
RS232/neoVI Communication using software
currently unavailable due to a timing issue
VGA As a SOPC component, can not
currently talk with software
Introduction • Results • Costs • Conclusion • Questions

COSTS
Costs
2 neoVI $3000 Radar $2200 DE2 board $500 PCB $200 FCC License $60 LCD/Touchscreen $300 Connectors/Cables $50 TOTAL $6310
Prototype:
Introduction • Results • Costs • Conclusion • Questions
Costs
Processor w/ CAN $400 Radar $2200 PCB $200 Touchscreen $150 TOTAL $2950
Production System:
Introduction • Results • Costs • Conclusion • Questions

CONCLUSION
Conclusion
How the Product Could be Improved:
Better processor No development board More memory, faster
Implement brakes Improve range of allowable speeds
Make use of acceleration readings and other vehicle information given to us by the radar
Introduction • Results • Costs • Conclusion • Questions
Conclusion
How the Product Could be Improved:
Have a CAN input controller to eliminate need for neoVI
Develop stability reading on the car to send yaw Should allow for better handling of
curves, low grade hills
Introduction • Results • Costs • Conclusion • Questions
Conclusion
Acknowledgements: JCI
Stew Gray Mark Michmerhuizen Sheetal Patel
Intrepid David Crockett
DaimlerChrysler Rene Nieuwenhuizen
Introduction • Results • Costs • Conclusion • Questions
Conclusion
Acknowledgements:
TRWBill VanderRoest
Calvin College Professor VanderLeest Professor Brouwer Professor Hekman Bob DeKraker Chuck Holwerda
Introduction • Results • Costs • Conclusion • Questions
QUESTIONS?