Adaptive Active Control of Sound in Smart Rooms (2014)
53
ADAPTIVE ACTIVE CONTROL OF SOUND IN SMART ROOMS DR. IMAN ARDEKANI
-
Upload
iman-ardekani -
Category
Technology
-
view
38 -
download
0
Transcript of Adaptive Active Control of Sound in Smart Rooms (2014)

ADAPTIVE ACTIVE CONTROL OF SOUND
IN SMART ROOMS
DR. IMAN ARDEKANI

2
This Presentation
Introduction 2Stabilization of ANC in Smart Rooms 3
1 Background
Remote Acoustic Sensing in Smart Rooms 4Experiments5Conclusion and Future Work 6
3
Background
Why ANC in Smart rooms:
① Evolving technological approaches
② Future of living rooms, hospital rooms office rooms & class rooms
③ Research with impact
Smart Rooms
4
Background
① Interesting theory in Physics
② Interesting theory in Control Engineering
③ High-tech design & implementation, e.g. FPGA, DSP
④ New challenges (when integrated with smart rooms)
Active Noise Control

5
Background
Active Noise Control / Smart Sensor Networks for Passenger Cars
Professional Research on ANC and Smart Rooms- Founder of Unitec Smart Rooms- Adaptive ANC in Smart Rooms- Finalist of IBM Innovation Award 2014
PhD & FRDF Postdoctoral Research on Adaptive ANC- More than 30 journal/conference papers on ANC- International research collaboration- Nominated for UoA Top Doctoral Thesis Award (by FoE)

6
INTRODUCTION
Smart Rooms Adaptive ANC Challenges

7
EnhancingQuality of Lifein Smart Living Rooms

8
EnhancingHuman Productivityin Smart Office Rooms

9
Enhancing Quality of Carein Smart Hospital Rooms

10
Enhancing Quality of Learningin Smart Class Rooms

11
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Smart Rooms’ Structure - Proposed
Acoustic Sig Pro
Medical Sig Pro
Features
Room BookRoom Book
Computer
Vision
Other Sig Pro Tech
Feat
ures
Controllers
Intelligent Agents
Robots
Other
Devices
Room BookRoom Book

12
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
This Seminar Focus
Acoustic Sig Pro
Medical Sig Pro
Room BookRoom Book
Computer
Vision
Other Sig Pro Tech
Controllers
Intelligent Agents
Robots
Other
Devices
Room BookRoom Book
Features

13
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Why ANC in Smart Rooms?
Acoustic Sig Pro
Intelligent Agents
Noise
Why Noise Control? 1. Human productivity (especially in open plan office rooms)2. Quality of life (more pleasant rooms) 3. Quality of interaction between smart room and occupants (speech)
Why not Passive Noise Control? • Passive Noise Control is bulky and inefficient for low frequency.
14
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
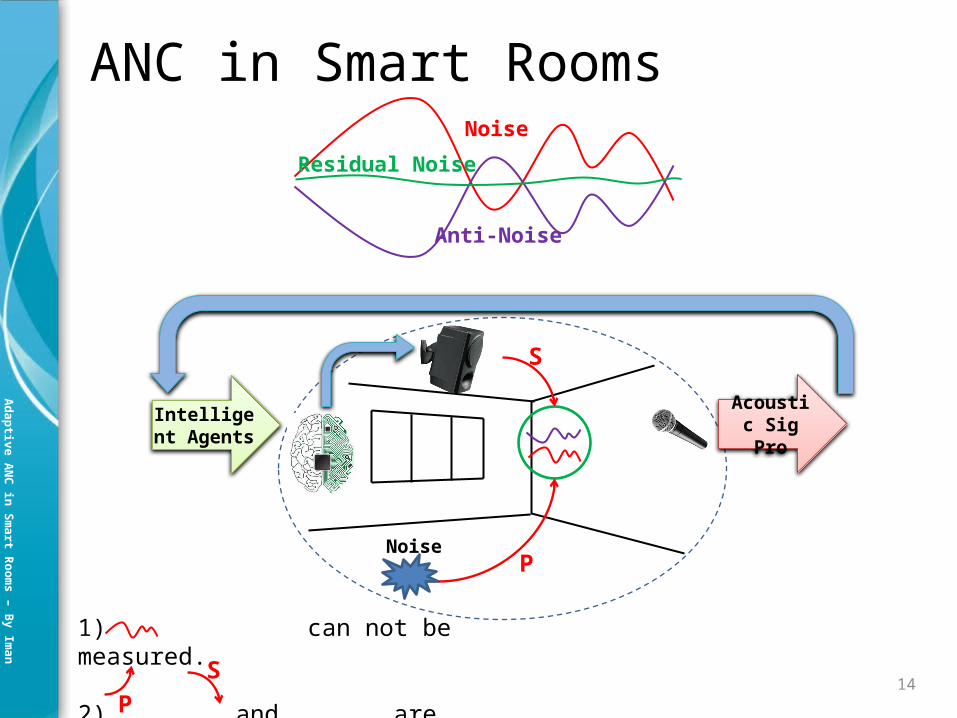
ANC in Smart Rooms
Acoustic Sig Pro
Intelligent Agents
Noise
Residual Noise
Noise
Anti-Noise
1) can not be measured.
2) and are unknown dynamic systems.
P
S
PS

15
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
ANC Stability
1 2 3
Uncertainty
Stab
ility
High
Moderat
eLo
w
Low Moderate High
1
2
3
Traditional ANC algorithms suffer low robustness in real-life applications. 1
17
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
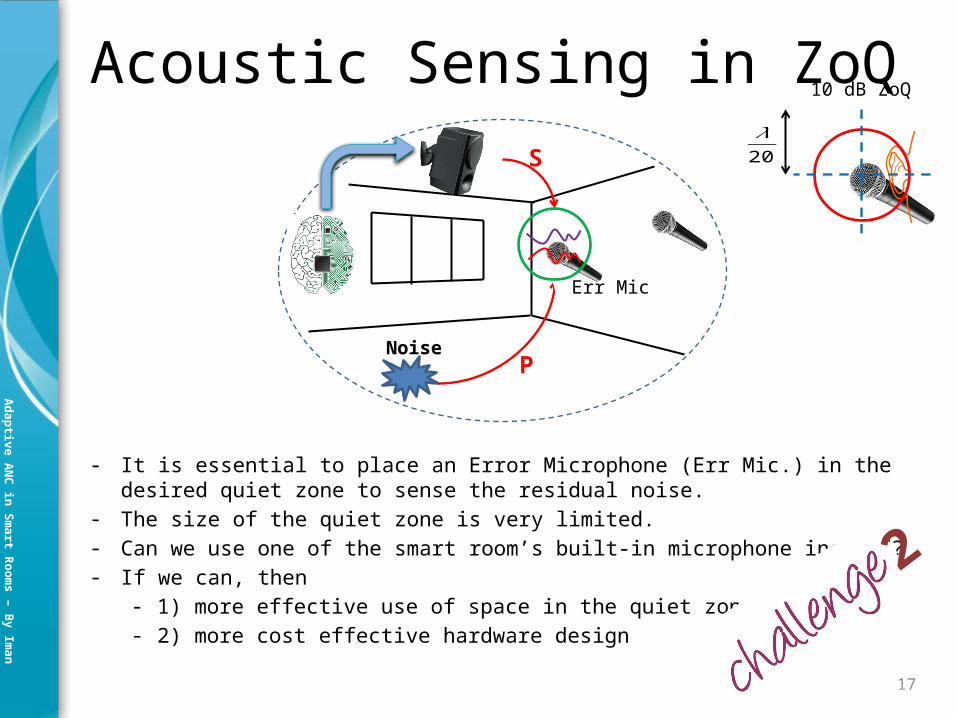
Acoustic Sensing in ZoQ
- It is essential to place an Error Microphone (Err Mic.) in the desired quiet zone to sense the residual noise.
- The size of the quiet zone is very limited. - Can we use one of the smart room’s built-in microphone instead?- If we can, then
- 1) more effective use of space in the quiet zone- 2) more cost effective hardware design
10 dB ZoQ
NoiseP
S𝜆20
Err Mic
2
18
STABILIZATION OF ANC IN SMART ROOMS
Root Locus (RL) Method ANC RL Plots Stabilization
Process
1
19
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
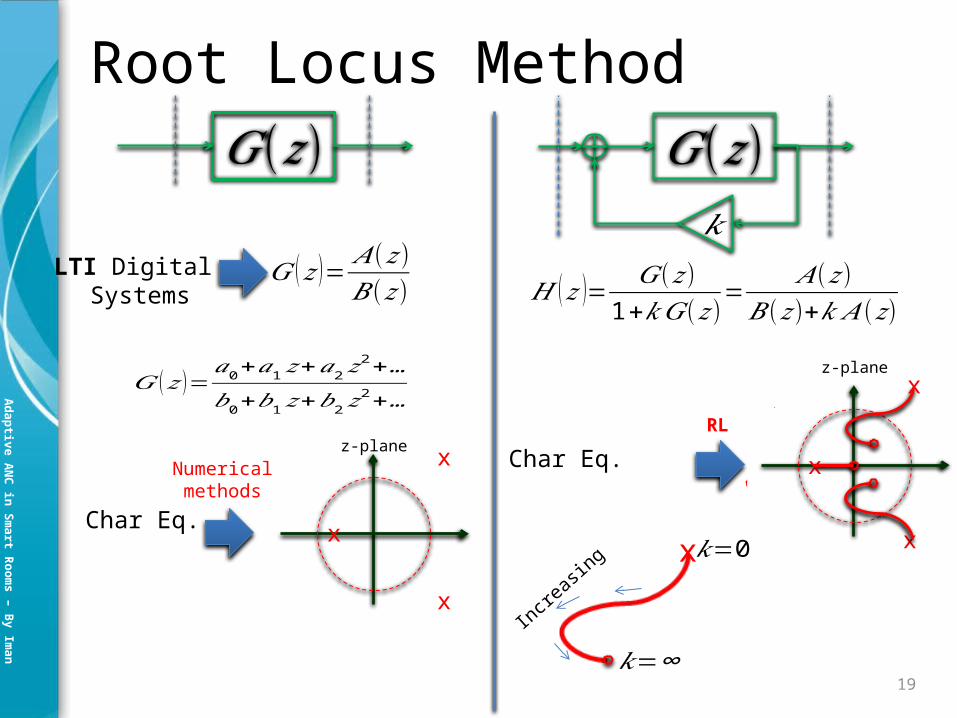
Numerical methods
Root Locus Method
Char Eq.
LTI Digital Systems
Numericalmethods
x
x
x
z-plane
𝐺 (𝑧 ) 𝐺 (𝑧 )
Char Eq.
RL
𝑘=0
Increasin
g
✗
𝐺 (𝑧 )=𝑎0+𝑎1 𝑧+𝑎2 𝑧
2+…𝑏0+𝑏1𝑧+𝑏2 𝑧
2+…
𝐺 (𝑧 )= 𝐴(𝑧)𝐵(𝑧) 𝐻 (𝑧 )= 𝐺(𝑧)
1+𝑘𝐺 (𝑧)=
𝐴(𝑧)𝐵(𝑧)+𝑘 𝐴(𝑧 )
𝑘
𝑘=∞
x
x
z-planex
x

20
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
2
1
Root Locus Methods
LTI Digital Systems
Char Eq.
RL
𝐺 (𝑧 ) 𝐺 (𝑧 )𝑘
Char Eq.
Numericalmethods
x
x
x
z-plane
𝐺 (𝑧 )=𝑎0+𝑎1 𝑧+𝑎2 𝑧
2+…𝑏0+𝑏1𝑧+𝑏2 𝑧
2+…
𝐺 (𝑧 )= 𝐴(𝑧)𝐵(𝑧) 𝐻 (𝑧 )= 𝐺(𝑧)
1+𝑘𝐺 (𝑧)=
𝐴(𝑧)𝐵(𝑧)+𝑘 𝐴(𝑧 )
x
z-planex
x𝑘=0
Increasin
g
𝑘=∞
x

21
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Root Locus Method
1LTI Digital Systems
2Char Eq.

22
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
𝐴(𝑧)
ANC RL Plots• Adaptation process performed by the FxLMS in adaptive ANC is a recursive
and non-linear process.
• However, by using the Independence Assumptions, a linear approximation
for the FxLMS adaptation process can be obtained.
• FxLMS stability is highly related to the adaptation step-size k so a stability
analysis w.r.t. k is needed.
𝑧𝑄−𝑧𝑄−1+𝑘 𝑃𝑥 ∑𝑚=𝑞
𝑄−1
𝑠𝑚❑ 2𝑧𝑄−1−𝑚=0
𝐵(𝑧)
2Char Eq.
1LTI Digital Systems
is an available parameter but and do not physically exist .
𝑞 𝑄−1
Room impulse response
Ampl
itude
Time index𝑠𝑞
𝑠𝑄− 1
noise power.
23
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
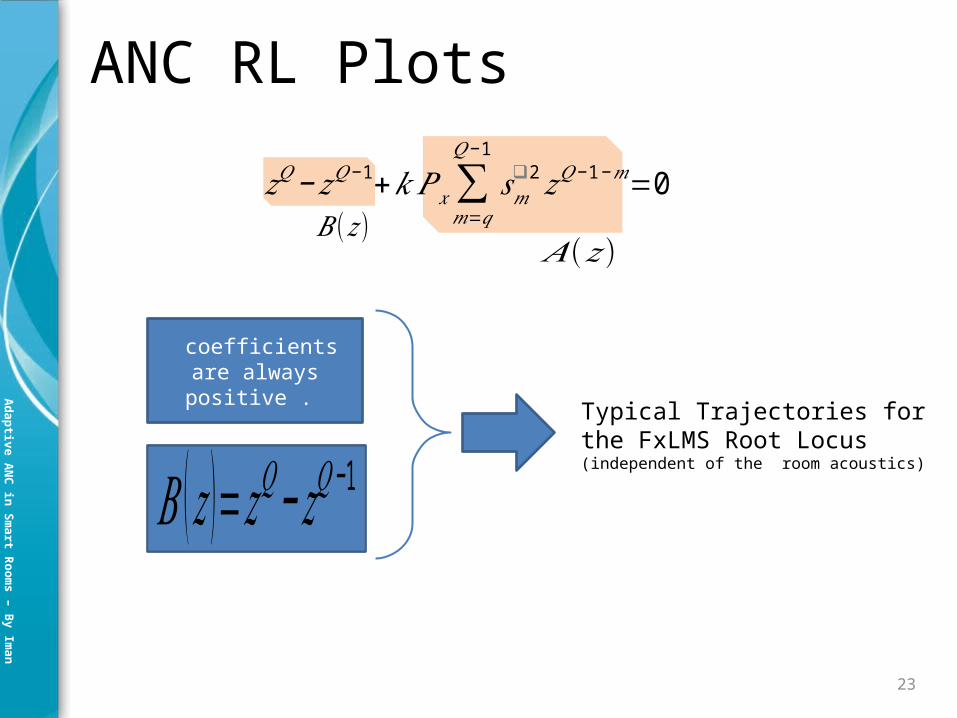
ANC RL Plots
coefficients are always positive .
𝐴(𝑧)
𝑧𝑄−𝑧𝑄−1+𝑘 𝑃𝑥 ∑𝑚=𝑞
𝑄−1
𝑠𝑚❑ 2𝑧𝑄−1−𝑚=0
𝐵(𝑧)
𝐵 (𝑧 )=𝑧𝑄−𝑧𝑄−1
Typical Trajectories for the FxLMS Root Locus(independent of the room acoustics)

24
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
ANC RL Plotsz-plane
Start points of ANC RL are located
at the roots of B(z).
B(z)=zQ-z Q-1
Q-1 start points at the origin and
1 start point at z=1.
z=0
z=1

25
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
ANC RL Plotsz-plane
The real interval of (0,1) belongs
to the ANC RL.

26
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
ANC RL Plotsz-plane
𝑥𝐵
B1
B2
There is always a breakaway
point on (0,1), given by
.
(close to z=1)
27
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
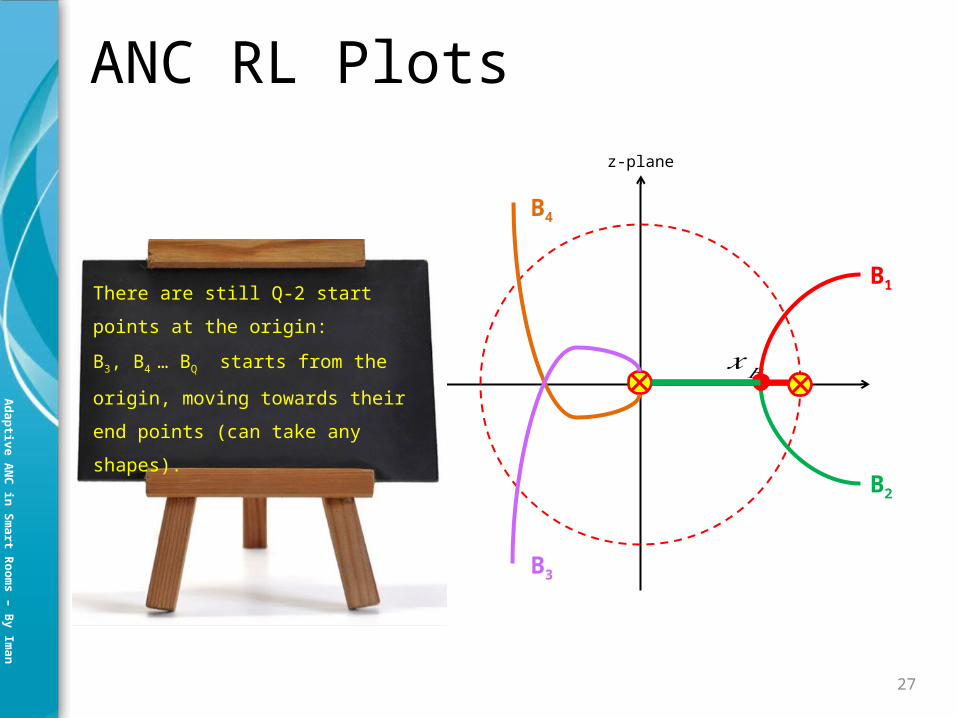
ANC RL Plotsz-plane
𝑥𝐵
B1
B2
B4
B3
There are still Q-2 start points at
the origin:
B3, B4 … BQ starts from the
origin, moving towards their end
points (can take any shapes).
28
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
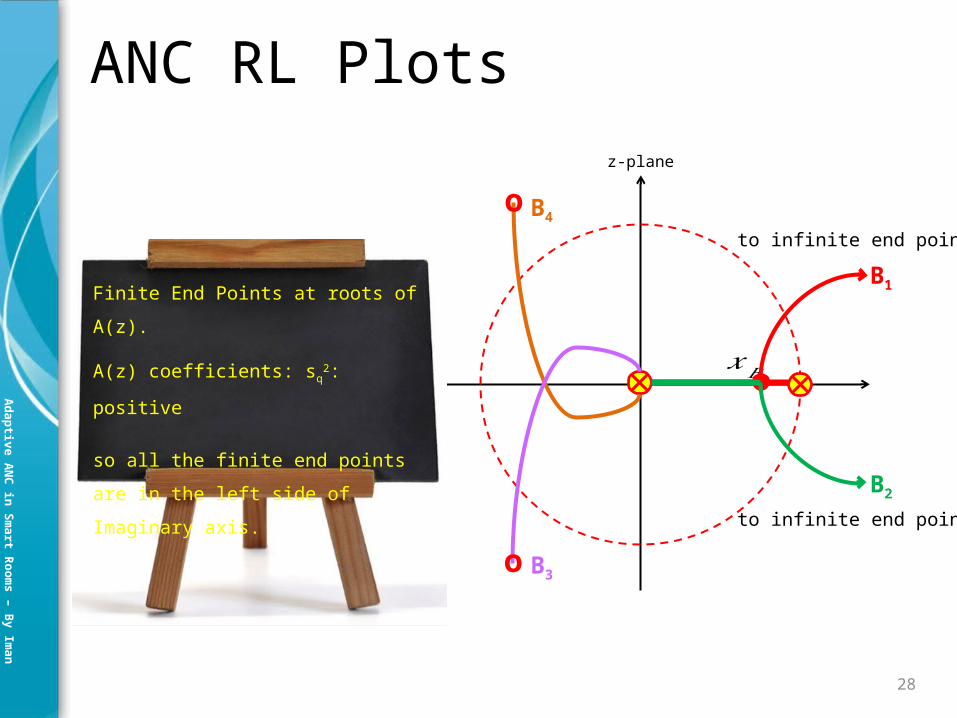
ANC RL Plotsz-plane
𝑥𝐵
B1
B2
B4
B3
o
o
to infinite end points
to infinite end points
Finite End Points at roots of A(z).
A(z) coefficients: sq2: positive
so all the finite end points are in
the left side of Imaginary axis.
29
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
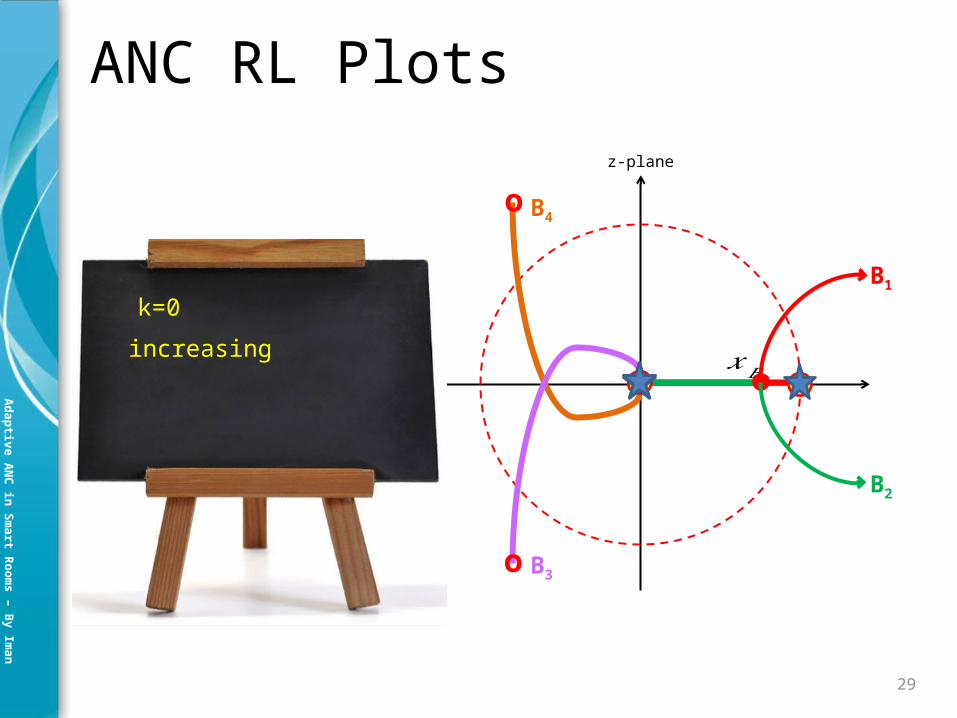
ANC RL Plotsz-plane
𝑥𝐵
B4
B3
o
o
increasing
k=0B1
B2
30
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
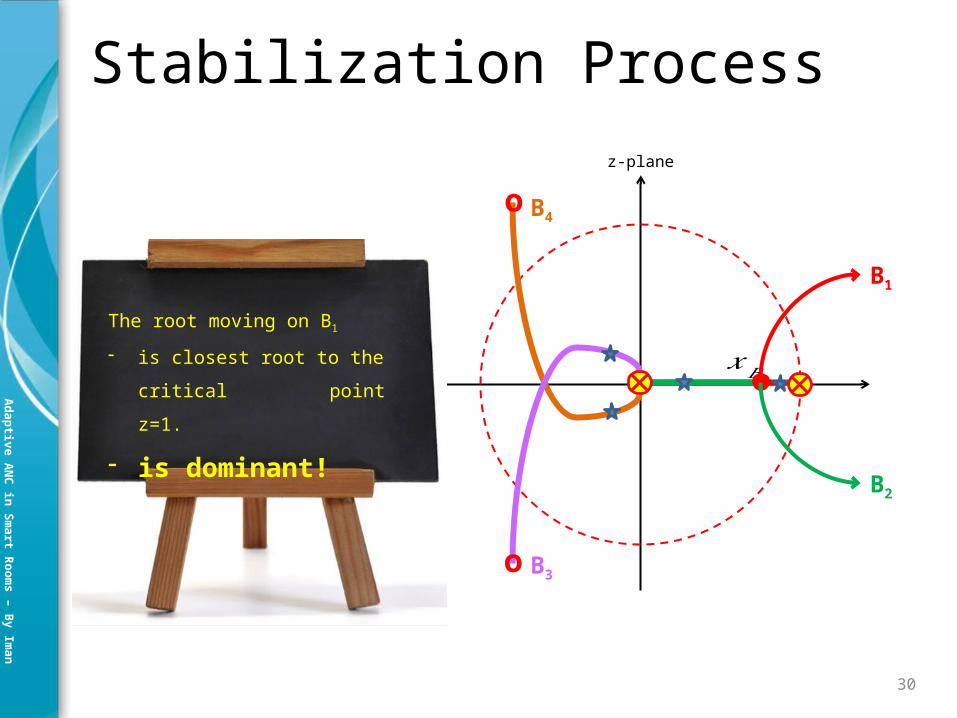
Stabilization Processz-plane
𝑥𝐵
B1
B2
B4
B3
o
o
The root moving on B1
- is closest root to the critical
point
z=1.
- is dominant!
31
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
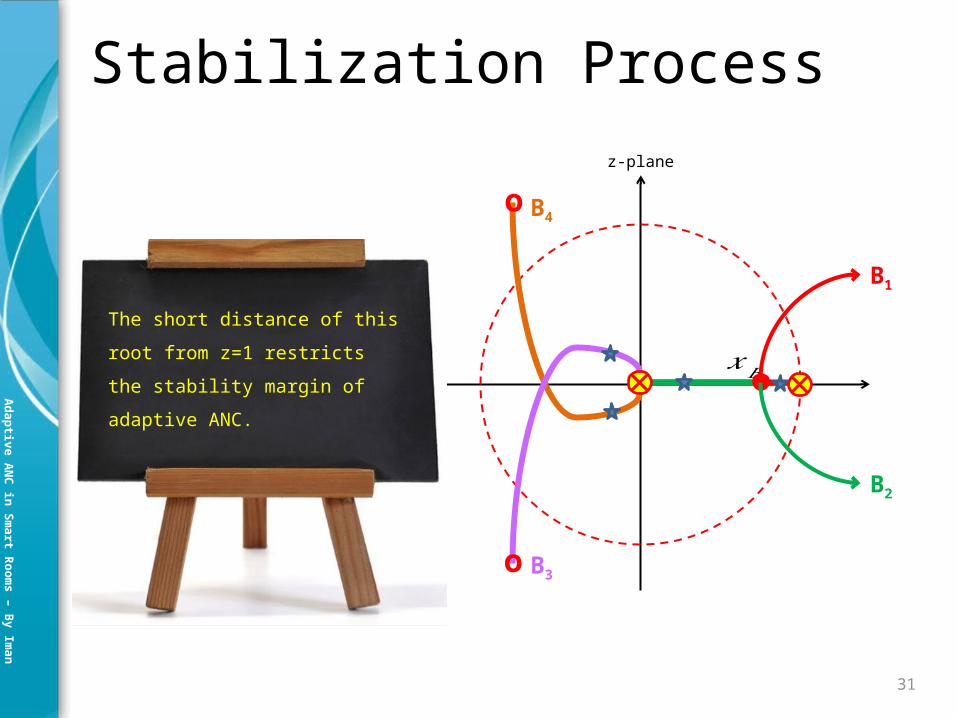
Stabilization Processz-plane
𝑥𝐵
B1
B2
B4
B3
o
o
The short distance of this root
from z=1 restricts the stability
margin of adaptive ANC.

32
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Stabilization Processz-plane
𝑥𝐵
B1
B2
B4
B3
o
o
Can we detour B1 so that it can
go further from the critical
point ?
33
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
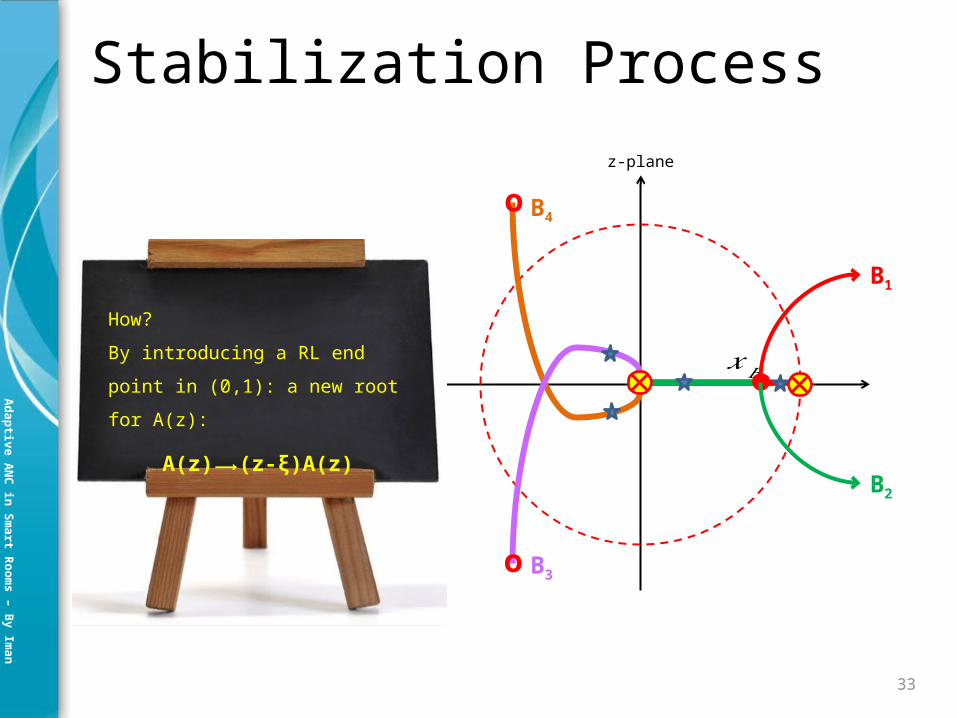
Stabilization Processz-plane
𝑥𝐵
B1
B2
B4
B3
o
o
How?
By introducing a RL end point in
(0,1): a new root for A(z):
A(z)⟶(z-ξ)A(z)

34
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Stabilization Process
A(z)⟶(z-ξ)A(z)
z-plane
B1
o𝑥𝐵
B2B4
B5
o
o B3
𝝃A(z)⟶(z-ξ)A(z)

35
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Stabilization ProcessModified RLOriginal RL
𝑥𝐵
B1
B2
B4
B5
o
o
B1
o
B2B4
B3
o
o B3
𝝃

36
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Stabilization Process
• but is not an actual systems.
Room Impulse Response
x
Ref Mic.
Err Mic.
+
Current Filter Parameters
Updated Filter Parameters
C(z)Compensator
𝐶 (𝑧 )= 1−𝜉1−𝜉 𝑧− 1
Filtered-Weight FxLMS

37
STABILIZATION OF ANC IN SMART ROOMS
1
Summary
• A novel method based on RL theory is developed.
• RL analysis of the adaptation process leads to develop new adaptive ANC algorithms.
• The new algorithms show good stability behavior in smart rooms.
• It is proved mathematically.
• Simulation and practical results support the theoretical findings.
38
REMOTE ACOUSTIC SENSING IN SMART
ROOMS
ANC Analysis in Acoustic Domain
Remote ANC Systems
2
39
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
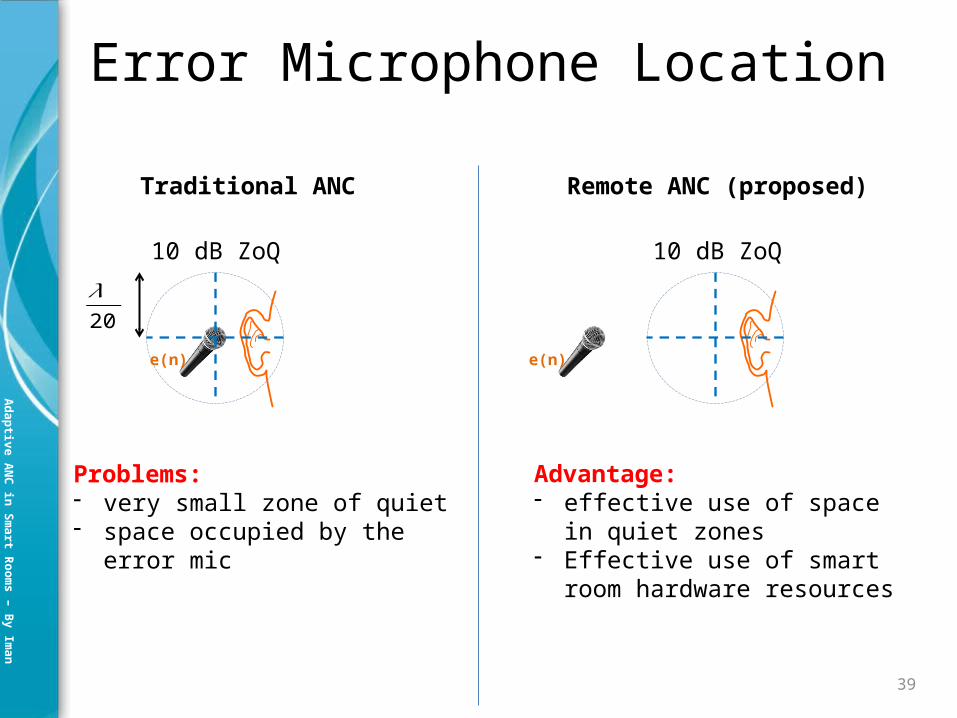
Error Microphone Location
𝜆 20
Traditional ANC
Problems: - very small zone of quiet- space occupied by the error mic
10 dB ZoQ
10 dB ZoQ
Advantage:- effective use of space in quiet zones- Effective use of smart room
hardware resources
Remote ANC (proposed)
e(n) e(n)

40
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
ANC Analysis in Acoustic Domain
y-axis+
x-ax
is+
𝑊 𝑜𝑝𝑡 (𝑧 )=𝑈𝑥 (𝑧)𝑈 𝑦 (𝑧)
𝐾 𝑥𝑦 𝑧−∆𝑥𝑦
x(n)
Ref Mic
Lx
y(n)
Control Source
Ly
LxLy
Lo
𝑑𝑦𝑑𝑥𝜑 𝑦Lr
𝑑𝑟
e(n)
Lo
Err Mic (ZoQ)

41
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
ANC Analysis in Acoustic Domain
• Since and are unknown, we cannot implement directly but The FxLMS
algorithm can adaptively adjust the adaptive filter to an estimate of .
𝑊 𝑜𝑝𝑡 (𝑧 )=𝑈𝑥 (𝑧)𝑈 𝑦 (𝑧)
𝐾 𝑥𝑦 𝑧−∆𝑥𝑦
Room Impulse Response
x
Ref Mic.
Err Mic.
+
Current Filter Parameters
Updated Filter Parameters
⟶𝑊𝑜𝑝𝑡 (𝑧 )
FxLMS Algorithm

42
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
ANC Analysis in Acoustic Domain
Px(n) e(n)
FxLMS
S
Control System
W

43
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
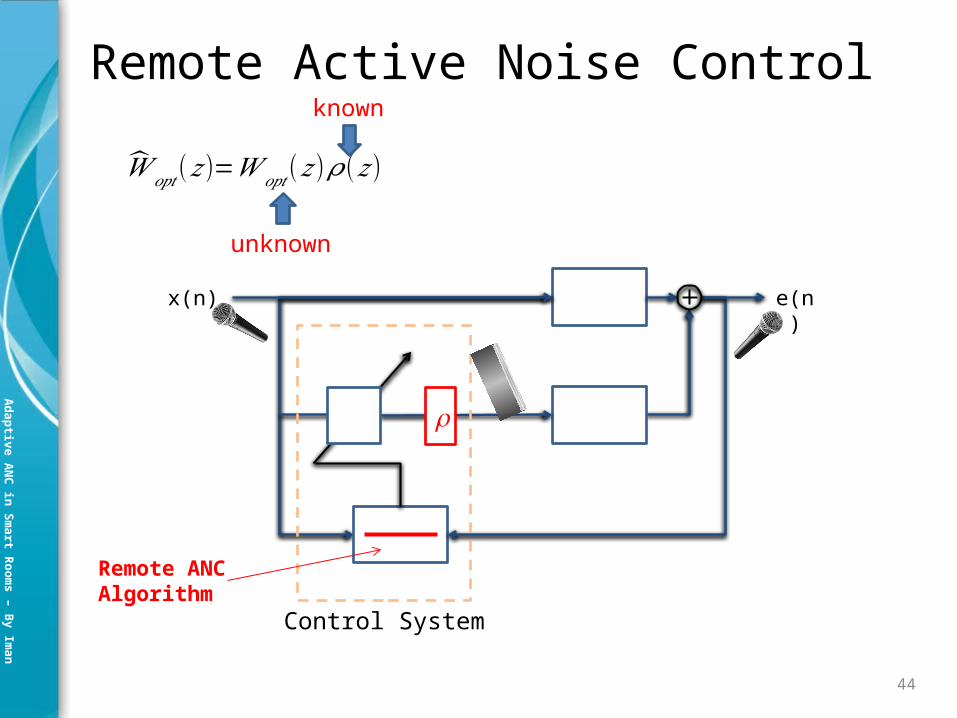
Remote Active Noise Control
y(n)
Ly
y-axis+
x-axis+
Lre(n)
Lo
x(n) Lx
LxLy
Lo
𝑑𝑦𝑑𝑥𝜑 𝑦Lr
𝑑𝑟
𝑑𝑥𝑟 𝑑 𝑦𝑟
𝑊 𝑜𝑝𝑡(𝑧)=𝑊𝑜𝑝𝑡 (𝑧)𝐾 𝜌 𝑧−∆𝜌
Static gain Time-delay
44
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Remote Active Noise Control
𝑊 𝑜𝑝𝑡(𝑧)=𝑊𝑜𝑝𝑡 (𝑧)𝜌 (𝑧 )
known
unknown
Px(n) e(n)
FxLMS
S
Control System
Remote ANCAlgorithm
W

45
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Remote Active Noise Control
Room Impulse Response
x
Ref Mic.
Err Mic.
+
Current Filter Parameters
Updated Filter Parameters
⟶𝑊𝑜𝑝𝑡 (𝑧 )
FxLMS-based Remote ANC Algorithm
+∆ 𝑒(𝑛)−

46
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Remote Active Noise Control
𝑊 𝑜𝑝𝑡(𝑧)=𝑊𝑜𝑝𝑡 (𝑧)𝜌 (𝑧 )
known
unknown
Px(n) e(n)
FxLMS
S
Control System
Remote ANCAlgorithm
W
-
Room Impulse Response

47
EXPERIMENTS
Setup Results

48
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Experimental Setup
NoiseP
S
NI CRIO
Smart Room Mic (Err Mic)
Smart Room Mic (Ref Mic)
Real-time Software(FPGA Design)

49
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Experimental Results – Remote ANC
10 cm
Initial noise level
Final noise level
Learning Room Acoustics

50
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Experimental Results – Stability
FxLMS
FwFxLMS

51
CONCLUSION
Contributions Future Work

52
Contributions
Investigated practical problems with adaptive ANC2Moved towards the integration of ANC into Smart Rooms 3
1 Improved the theoretical understanding of ANC
Developed a flexible and high-performance experimental setup for ANC4Published the results in high ranking journals5Made international collaboration 6
53
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Future Work – ANC In Medical Devices
MRI
Incubator
Hearing Aids Other devices

54
Ad
ap
tive A
NC
in S
mart R
oom
s – B
y Im
an
A
rdekan
i
Future Work – Smart Rooms
Acoustic Sig Pro
Medical Technology
Room Book
Computer
Vision
Intelligent Agents
Assisti
ve
Robotics
- Smart Hospital Rooms - Smart Assistive Rooms (for elderly and people with disabilities )
Current
Research
Future
Plan
Energy
Management