Ad Hoc Networks: Cross-Layer Issuesdownloads.hindawi.com/journals/specialissues/964695.pdf ·...
189
EURASIP Journal on Wireless Communications and Networking Ad Hoc Networks: Cross-Layer Issues Guest Editors: Sergio Palazzo, Leandros Tassiulas, and Lang Tong
Transcript of Ad Hoc Networks: Cross-Layer Issuesdownloads.hindawi.com/journals/specialissues/964695.pdf ·...

EURASIP Journal on Wireless Communications and Networking
Ad Hoc Networks: Cross-Layer Issues
Guest Editors: Sergio Palazzo, Leandros Tassiulas,and Lang Tong

Ad Hoc Networks: Cross-Layer Issues
EURASIP Journal on Wireless Communications and Networking

Ad Hoc Networks: Cross-Layer Issues
Guest Editors: Sergio Palazzo, Leandros Tassiulas,and Lang Tong
EURASIP Journal on Wireless Communications and Networking

Copyright © 2005 Hindawi Publishing Corporation. All rights reserved.
This is a special issue published in volume 2005 of “EURASIP Journal on Wireless Communications and Networking.” All articles areopen access articles distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.

Editor-in-ChiefPhillip Regalia, Institut National des Telecommunications, France
Associate EditorsThushara Abhayapala, Australia Fary Ghassemlooy, UK Eric Moulines, FranceFarid Ahmed, USA Alfred Hanssen, Norway Sayandev Mukherjee, USAAlagan Anpalagan, Canada Stefan Kaiser, Germany A. Nallanathan, SingaporeAnthony C. Boucouvalas, UK G. K. Karagiannidis, Greece Kamesh Namuduri, USAJonathon Chambers, UK Hyung-Myung Kim, Korea Athina Petropulu, USABiao Chen, USA Chi Chung Ko, Singapore H. Vincent Poor, USAPascal Chevalier, France Richard J. Kozick, USA Brian Sadler, USAChia-Chin Chong, Korea Bhaskar Krishnamachari, USA Ivan Stojmenovic, CanadaSoura Dasgupta, USA Vincent Lau, Hong Kong Lee Swindlehurst, USAPetarM. Djuric, USA Dave Laurenson, Scotland Sergios Theodoridis, GreeceAbraham Fapojuwo, Canada Tho Le-Ngoc, Canada Lang Tong, USAMichael Gastpar, USA Tongtong Li, USA Luc Vandendorpe, BelgiumAlex B. Gershman, Canada Wei (Wayne) Li, USA Yang Xiao, USAWolfgang Gerstacker, Germany Steve McLaughlin, UK Lawrence Yeung, Hong KongDavid Gesbert, France Marc Moonen, Belgium Weihua Zhuang, Canada

Contents
Editorial, Sergio Palazzo, Leandros Tassiulas, and Lang TongVolume 2005 (2005), Issue 5, Pages 607-609
Position-Based Relaying with Hybrid-ARQ for Efficient Ad Hoc Networking, Bin Zhaoand Matthew C. ValentiVolume 2005 (2005), Issue 5, Pages 610-624
Traffic-Dependent and Energy-Based Time Delay Routing Algorithms for Improving EnergyEfficiency in Mobile Ad Hoc Networks, K. Murugan and S. ShanmugavelVolume 2005 (2005), Issue 5, Pages 625-634
Energy-Aware Routing Protocol for Ad Hoc Wireless Sensor Networks, Raminder P. Mann,Kamesh R. Namuduri, and Ravi PendseVolume 2005 (2005), Issue 5, Pages 635-644
A Cross-Layer Route Discovery Framework for Mobile Ad Hoc Networks, Bosheng Zhou,Alan Marshall, Jieyi Wu, Tsung-Han Lee, and Jiakang LiuVolume 2005 (2005), Issue 5, Pages 645-660
Adaptive QoS Routing by Cross-Layer Cooperation in Ad Hoc Networks, Hongxia Sunand Herman D. HughesVolume 2005 (2005), Issue 5, Pages 661-671
Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm with Carrier-SensingMultiple Access for Wireless Sensor Networks, Chiara Buratti, Andrea Giorgetti, and Roberto VerdoneVolume 2005 (2005), Issue 5, Pages 672-685
Automatic Decentralized Clustering for Wireless Sensor Networks, Chih-Yu Wenand William A. SetharesVolume 2005 (2005), Issue 5, Pages 686-697
Optimizing Transmission and Shutdown for Energy-Efficient Real-time Packet Scheduling inClustered Ad Hoc Networks, Sofie Pollin, Bruno Bougard, Rahul Mangharam, Francky Catthoor,Ingrid Moerman, Ragunathan Rajkumar, and Liesbet Van der PerreVolume 2005 (2005), Issue 5, Pages 698-711
Dynamic Resource Reservation and Connectivity Tracking to Support Real-Time Communicationamong Mobile Units, Tullio Facchinetti, Giorgio Buttazzo, and Luis AlmeidaVolume 2005 (2005), Issue 5, Pages 712-730
Authentication Based on Multilayer Clustering in Ad Hoc Networks, Keun-Ho Lee, Sang-Bum Han,Heyi-Sook Suh, SangKeun Lee, and Chong-Sun HwangVolume 2005 (2005), Issue 5, Pages 731-742
Cross-Layer QoS Control for Video Communications over Wireless Ad Hoc Networks, Qi Qu,Yong Pei, James W. Modestino, Xusheng Tian, and Bin WangVolume 2005 (2005), Issue 5, Pages 743-756

An Evaluation of Media-Oriented Rate Selection Algorithm for Multimedia Transmission inMANETs, Mohammad Hossein Manshaei, Thierry Turletti, and Thomas GuionnetVolume 2005 (2005), Issue 5, Pages 757-773
A Survey of Application Distribution in Wireless Sensor Networks, Mauri Kuorilehto,Marko Hännikäinen, and Timo D. HämäläinenVolume 2005 (2005), Issue 5, Pages 774-788

EURASIP Journal on Wireless Communications and Networking 2005:5, 607–609c© 2005 Hindawi Publishing Corporation
Editorial
Sergio PalazzoDepartment of Computer and Telecommunication Engineering, University of Catania, Viale A. Doria 6, 95125 Catania, ItalyEmail: [email protected]
Leandros TassiulasDepartment of Computer Engineering and Telecommunication, University of Thessaly, Argonafton & Filellinon,38221 Volos, GreeceEmail: [email protected]
Lang TongSchool of Electrical and Computer Engineering, Cornell University, Ithaca, NY 14853, USAEmail: [email protected]
Ad hoc networks, due to their intended support of “no-limit”infrastructure-less communication, pose many significantnew challenges with respect to traditional wireless networks.Main peculiarities of ad hoc networks, which typically re-quire new solutions for distributed signal processing andcontrol, can be summarized as follows: autonomous andspontaneous nature of nodes which leads to dynamic un-predictable topology; mobility of nodes which may causelink failures and network partitions; battery limitationswhich imply constraints on transmission power and networkconnectivity; need of cooperative and/or opportunistic be-haviour in spite of the natural energy-conservative selfish at-titude of nodes.
The traditional layered protocol architectures are not wellsuited to deal with the above-multifaceted issues, becausethey do not exploit the potential improvement in perfor-mance that can be obtained through cross-layer design.
Typical examples of transversal objectives which deservejoint interaction of algorithms and techniques that span mul-tiple layers are energy efficiency, quality-of-service support,reliability, network scalability.
This special issue has been conceptualized within theframework of the IST-FP6 Network of Excellence in Wire-less Communications (NEWCOM), and, more specifically,within the context of the NEWCOM Project A on “Ad Hocand Sensor Networks.”
It contains thirteen papers, which are all communed bytheir focus on the potential benefits gained by applying across-layer design perspective to ad hoc networks. More in
detail, five papers address cross-layer approaches to routing,five deal with cross-layer design of clustering and topologymanagement strategies, two with support of multimedia ap-plications, and finally one paper focuses on middleware ar-chitectures and embedded operating systems in wireless sen-sor networks.
The first paper “Position-based relaying with hybrid-ARQ for efficient ad hoc networking,” by B. Zhao and M.C. Valenti, presents an integrated cross-layer protocol which,using position location, jointly performs operations of co-operative diversity, hybrid-ARQ retransmission, and relay-ing/routing in an energy-efficient way.
The second paper “Traffic-dependent and energy-basedtime delay routing algorithms for improving energy effi-ciency in mobile ad hoc networks,” by K. Murugan and S.Shanmugavel, introduces an extension to the basic DSR pro-tocol that utilizes energy-efficiency metrics to optimize rout-ing.
The third paper “Energy-aware routing protocol for adhoc wireless sensor networks,” by R. P. Mann et al., proposesa new routing protocol where energy consumption consid-erations are exploited to estimate the route expiry time andminimize the route request processing.
The fourth paper “A cross-layer route discovery frame-work for mobile ad hoc networks,” by B. Zhou et al., in-troduces a cross-layer route discovery framework which isaimed at reducing the problems that are known in literatureas next-hop racing and rebroadcast redundancy.
In the fifth paper “Adaptive QoS routing by cross-layercooperation in ad hoc networks,” H. Sun and H. D. Hughes

608 EURASIP Journal on Wireless Communications and Networking
propose an adaptive multipath routing scheme which ex-ploits local QoS information provided by cross-layer mecha-nisms.
The sixth paper “Cross-layer design of an energy-efficientcluster formation algorithm with carrier-sensing multiple ac-cess for wireless sensor networks,” by C. Buratti et al., intro-duces a new protocol, called LEACH B+, which enables self-organization of nodes in clusters and allows nodes to routeinformation according to energy-related considerations.
In the seventh paper “Automatic decentralized clusteringfor wireless sensor networks,” C.-Y. Wen and W. A. Setharespropose and analyze a clustering scheme where sensors in anad hoc network use local criteria to determine their own op-erations.
The eighth paper “Optimizing transmission and shut-down for energy-efficient real-time packet scheduling inclustered ad hoc networks,” by S. Pollin et al., introducesa cross-layer transmission strategy which considers thetransceiver power characteristics, the system load, and thechannel constraints, as well as the relevant tradeoff.
The ninth paper “Dynamic resource reservation andconnectivity tracking to support real-time communicationamong mobile units,” by T. Facchinetti et al., proposes a newMAC protocol to schedule real-time communication in anetwork of robotic mobile units and introduces a distributedtopology tracking mechanism which is used to support re-source reservation and packet routing.
Security in clustered ad hoc networks is the subject of thetenth paper “Authentication based on multilayer clustering inad hoc networks,” by K.-H. Lee et al., where an end-to-endmessage authentication scheme that relies on mutual trustbetween nodes in different clusters is introduced.
In the eleventh paper “Cross-layer QoS control for videocommunications over wireless ad hoc networks,” Q. Qu et al.propose a cross-layer rate-control scheme and a joint source-channel coding which are based on an analytical study ofhow the effective video transmission rate is affected by suchparameters as the interference environment, the number oftransmission hops to the destination, and the packet loss rate.
The twelfth paper “An evaluation of media-orientedrate selection algorithm for multimedia transmission inMANETs,” by M. H. Manshaei et al., proposes a cross-layermechanism for dynamically selecting the transmission modeof real-time audio/video information over 802.11 ad hoc net-works which consider both the channel conditions and char-acteristics of the media.
In the thirteenth paper “A survey of application distribu-tion in wireless sensor networks,” by M. Kuorilehto et al., ataxonomy of middleware architectures and embedded oper-ating systems in wireless sensor networks is presented and thenew framework SensorOS, aimed at minimizing the controlsignalling overhead and maximizing the network lifetime, isintroduced.
Finally, we would like to thank the Editor-in-Chief,Phillip Regalia, for giving us the opportunity and the supportto achieve this special issue within the frame of the IST FP6Network of Excellence NEWCOM, all the authors of the pa-pers submitted (either accepted or not) for considering this
issue as a target of their own work, and—last but not least—the many reviewers who allowed us to take our editorial de-cisions on which papers to select. Our indebted appreciationto all of them!
Sergio PalazzoLeandros Tassiulas
Lang Tong
Sergio Palazzo received his degree in elec-trical engineering from the University ofCatania in 1977. Since 1987, he has beenat the University of Catania, where he isnow a Full Professor of telecommunicationsnetworks. In 1994, he spent the summer atthe International Computer Science Insti-tute (ICSI), Berkeley, as a Senior Visitor. Heis a recipient of the 2003 Visiting ErskineFellowship by the University of Canterbury,Christchurch, New Zealand. He will be the General Chair of theACM MobiHoc 2006 Conference. In the recent past, he has beenthe General Vice Chair of the ACM MobiCom 2001 Conference. Hecurrently serves on the Editorial Boards of the IEEE/ACM Trans-actions on Networking, IEEE Transactions on Mobile Computing,Computer Networks, Ad Hoc Networks, and Wireless Communi-cations and Mobile Computing. In the recent past, he also was anEditor of the IEEE Wireless Communications Magazine. He was aGuest Editor of special issues in the IEEE Journal of Selected Areasin Communications, in the IEEE Personal Communications Mag-azine, and in the Computer Networks Journal. He is the recipientof the 2002 Best Editor Award for the Computer Networks Journal.His current research interests include mobile systems, wireless andsatellite IP networks, multimedia traffic modelling, and protocolsfor the next generation of the Internet.
Leandros Tassiulas is a Professor in theDepartment of Computer Engineering andTelecommunications at the University ofThessaly, Greece, since 2002 and a Re-search Professor at the University of Mary-land, College Park. His research activityover the last fifteen years has been towardsthe development of communication andinformation-processing networks that facil-itate access and exchange of informationamong multiple entities. Current research and teaching topics in-clude wireless mobile communications, ad hoc networks, smartantennas, sensor networks, high-speed networked environments.He was an Assistant Professor at the Polytechnic University, NY, in1991–1995, an Associate Professor at the University of Maryland,College Park, until 2002 (on leave from 2000 to 2002), and a Pro-fessor of computer science at the University of Ioannina, Greece,in 1999–2002. He obtained the Diploma in electrical engineeringfrom the University of Thessaloniki, Greece, in 1987, and the M.S.and Ph.D. degrees in electrical engineering from the University ofMaryland, College Park, in 1989 and 1991, respectively. He has beenan Associate Editor for Communication Networks for the IEEETransactions on Information Theory and an Editor for IEEE/ACMTransactions on Networking. His research activity received severalrecognitions including a National Science Foundation (NSF) Re-search Initiation Award in 1992, an NSF CAREER Award in 1995,

Editorial 609
an Office of Naval Research Young Investigator Award in 1997, aBodossaki Foundation Award in 1999, and the INFOCOM ’94 BestPaper Award.
Lang Tong joined Cornell University in1998 where he is now a Professor. Prior tojoining Cornell University, he was on fac-ulty at the West Virginia University and theUniversity of Connecticut. He was also the2001 Cor Wit Visiting Professor at the DelftUniversity of Technology. He received theB.E. degreee from Tsinghua University, Bei-jing, China, in 1985, and Ph.D. degree inelectronic engineering from the Universityof Notre Dame, Notre Dame, Indiana, in 1991. He was a Post-doctoral Research Affiliate at the Information Systems Laboratory,Stanford University, in 1991. He is a Fellow of the IEEE. He receivedthe Outstanding Young Author Award from the IEEE Circuits andSystems Society, the 2004 Best Paper Award (with Min Dong) fromthe IEEE Signal Processing Society, and the 2004 Leonard G. Abra-ham Prize Paper Award from the IEEE Communications Society(with Parvathinathan Venkitasubramaniam and Srihari Adireddy).He also received the Young Investigator Award from the Office ofNaval Research. His research is in the general area of statisticalsignal processing, communication systems and networks, and in-formation theory. Specific topics include multiaccess communica-tions, parameter estimation and detection, random access proto-cols, and performance analysis. His research group is currently in-vestigating roles of signal processing in wireless systems and net-works with specific applications in cellular and ad hoc networks,detection and estimation in sensor networks, broadcast HDTV,wireless LAN, and cable and DSL systems.

EURASIP Journal on Wireless Communications and Networking 2005:5, 610–624c© 2005 B. Zhao and M. C. Valenti
Position-Based Relaying with Hybrid-ARQfor Efficient Ad Hoc Networking
Bin ZhaoLane Department of Computer Science and Electrical Engineering, College of Engineering and Mineral Resources,West Virginia University, Morgantown, WV 26506-6109, USAEmail: [email protected]
Matthew C. ValentiLane Department of Computer Science and Electrical Engineering, College of Engineering and Mineral Resources,West Virginia University, Morgantown, WV 26506-6109, USAEmail: [email protected]
Received 15 June 2004; Revised 3 January 2005
This paper presents and analyzes an integrated, cross-layer protocol for wireless ad hoc networking that utilizes position loca-tion (e.g., through an onboard GPS receiver) and jointly performs the operations of network-layer relaying and link-layer ARQ-based error control. The protocol is a modified version of the hybrid-ARQ-based intra-cluster geographically-informed relay-ing (HARBINGER) protocol (2005) and unifies the concepts of geographic random forwarding (GeRaF) (2003), point-to-pointhybrid-ARQ (2001), and cooperative diversity (2004). The modification makes the protocol especially suitable for sensor networkswhose nodes cycle in and out of sleep states and permits a closed-form analysis. Performance bounds and simulations indicatethe potential for a dramatic improvement in the tradeoff between active node density and end-to-end message delay as comparedwith the GeRaF protocol and are used to motivate further study of practical implementation issues.
Keywords and phrases: relay networks, ad hoc networking, cross-layer protocols, hybrid-ARQ, GeRaF, HARBINGER.
1. INTRODUCTION
Wireless ad hoc networks in general, and sensor networksin particular, must be energy efficient and able to delivermessages with low latency. One way to improve the energy-latency tradeoff is to exploit the inherent spatial diversitythat arises when multiple relay nodes are within transmissionrange of each source node [1, 2]. A properly designed cross-layer protocol could enable multiple single-antenna deviceslocated in close proximity of one another to operate as avirtual antenna array by implementing a strategy known ascooperative diversity [3]. Another way to conserve energy isto periodically put each radio into a sleep mode, since lis-tening to idle channels consumes significant processing andtransceiver power [4]. The lifetime of the network is primar-ily a function of the duty cycle of the nodes, and networkswhose nodes are in a sleep state for a higher percentage oftime will last longer. However, these two strategies conflict
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
with one another. A network with an aggressive sleep cyclemight not have a high enough active node density for co-operative diversity to be effective. In this paper, we will de-scribe and analyze efficient cross-layer protocols that simul-taneously allow a wireless network to exploit distributed di-versity while maintaining an aggressive sleep schedule.
The protocols discussed in this paper are based uponthe HARBINGER1 protocol that we first introduced in [1].HARBINGER is a generalization of the concept of hybrid-ARQ [5]. With hybrid-ARQ, messages are encoded usinga low-rate mother code and broken into several frames ofincremental redundancy (IR). The transmitter will send IRframes one at a time until the receiver is able to decode themessage and responds with a positive acknowledgment. Withtraditional point-to-point hybrid-ARQ, all IR frames are sentby the source node. However, in dense wireless networks,nodes near the source and/or destination may overhear thetransmitted frames. A cluster can be formed by pooling thesource, destination, and several nearby relay nodes. If any
1Hybrid-ARQ-based intra-cluster geographically-informed relaying.

Position-Based Relaying with Hybrid-ARQ 611
of the relay nodes are able to successfully decode the mes-sage, then they can transmit the next IR frame. This adds adimension of transmit spatial diversity, since all transmittedframes do not come from the same location. HARBINGERis a true cross-layer protocol because it combines elements oflink-layer error control (through transmission of incremen-tal redundancy) and network-layer routing (through relayselection).
Though simple in concept, implementing HARBINGERposes several challenges. The most crucial issue is that sev-eral relays in the cluster could overhear the transmission anda contention scheme is required to determine which relaystransmit and when they do so. The solution suggested in [1],and also adopted in this paper, is to use geographic informa-tion to guide the relay schedule. It is assumed that each nodeknows its own location (by using an onboard GPS receiveror a localization algorithm) and that messages are addressedby the physical location of the destination. When a messageis successfully decoded by multiple relays, then the relay thatis closest to the destination will be the one that transmits thenext IR frame, thus maximizing the forward progress of themessage. Implementation details of this contention schemeare discussed later in this paper.
Another issue with the basic version of HARBINGER isthat it does not lend itself to networks with aggressive sleepschedules and requires each node to buffer a fairly large num-ber of received IR frames. This is because all nodes in thecluster must remain awake and available to transmit the nextIR frame until the message is successfully decoded at the des-tination. Furthermore, each node must keep copies of everyIR frame it receives from every node in the cluster until themessage is finally decoded by the destination. Because eachnode buffers all of the frames it receives and these frames aresent from multiple transmitters, the memory in the systemprecludes an efficient closed-form analysis, and thus perfor-mance must be assessed through simulation (all numericalresults in [1] were found through simulation).
The twist on HARBINGER considered in this paper is toallow all nodes to flush their memory of previously transmit-ted IR frames every time a new relay is selected to forward themessage, that is, every time there is forward progress. Thoughseemingly a minor modification, this has a profound impacton the system. First, it reduces the required buffer size at eachrelay and second, it allows nodes to go back to sleep oncea new relay is selected. Just as some nodes in the cluster goback to sleep, others may wake up, thereby making the clus-ter composition time-varying, adding an additional elementof time-diversity. Finally, and perhaps most importantly forthis paper, by constraining the nodes to flush their memoryeach time the message hops to the next relay, a closed-formanalysis is possible.
Even though nodes flush their memory after each for-ward hop, hybrid-ARQ is still an important feature of theprotocol. To see this, consider a situation where the prop-agation environment is isotropic and the channel is un-faded (thereby producing concentric circles of equal signal-to-noise ratio). The low-rate mother code is broken intoM equal-sized frames of incremental redundancy. When the
first IR frame is sent, all nodes within some range R1 ofthe source will be able to successfully decode the message,where R1 depends on the minimum SNR required to decodethe first IR frame. If there is no node within range R1, thenthe source can send the next IR frame. The implication ofsending the second frame is that the code rate has effectivelybeen lowered, and therefore the reachable range will have in-creased; therefore, any node within range R2 > R1 will be ableto decode the second frame (provided that it was awake whenthe first frame was transmitted). This process continues un-til, finally, the Mth frame is sent and any node within rangeRM is able to decode the frame.
Under the memory-flushing constraint considered inthis paper, HARBINGER is related to an independently de-veloped protocol known as geographic random forwarding(GeRaF) [6, 7]. Like our protocol, GeRaF is a cross-layer pro-tocol that uses position location to guide the selection of a re-lay. However, GeRaF does not use hybrid-ARQ, and is there-fore only able to reach nodes within range R1. In fact, GeRaFis a special case of HARBINGER, and in particular corre-sponds to the case that M = 1. The benefit of using hybrid-ARQ (M > 1) is that the coverage area effectively increases af-ter each transmission. As illustrated in the numerical results,the coverage expansion effect allows the network to operatewith a lower density of active nodes, thereby allowing the sys-tem to operate with a more aggressive sleep schedule than ifit used GeRaF.
The rest of this paper is organized as follows. In Section 2,the basic HARBINGER protocol is briefly reviewed andmodifications related to memory flushing are discussed. Twonew versions of HARBINGER, termed fast HARBINGER [8]and slow HARBINGER [9] are presented. Section 3 presentsan analysis of these two versions of HARBINGER througha nontrivial generalization of GeRaF. Section 4 provides nu-merical results and studies the impact of parameters such asactive node density, path loss exponent, and M (the maxi-mum number of IR frames). Simulation results are providedto validate the analysis. Finally, Section 5 draws conclusionsand suggests paths for future research.
2. MODIFIED HARBINGER
Consider a network N = Zk : 1 ≤ k ≤ K consisting ofa source Zs, a destination Zd = ZK , and K − 2 relays. Eachnode has a single half-duplex radio and a single antenna.The propagation environment is isotropic and impaired onlyby exponential path loss and additive white Gaussian noise(AWGN). While the channel is likely to be affected also byinterference and fading, such issues were already discussedin [1], are outside the scope of the present paper, and willonly obscure the analysis that we present here. Nodes arenumbered according to their distance to the destination, withZ1 being the furthest and ZK−1 being the closest. Initially,the source is node Zs = Z1, but the identity of the sourcenode changes as the message propagates through the net-work. Time is divided into slots s, which are of equal dura-tion. Nodes cycle on and off according to a pseudorandomsleep schedule, and we denote the cluster C(s) ⊂ N to be the

612 EURASIP Journal on Wireless Communications and Networking
set of geographically advantaged2 active nodes within rangeRM of the source during the sth slot. The average density ofactive nodes per unit area is denoted by ρ. For analytical pur-poses, it is assumed that the nodes are distributed accordingto a two-dimensional Poisson process, though the protocolitself will work for any arbitrary node distribution.
The source begins by encoding a bd bit message into acodeword of length n symbols. The codeword is broken intoM frames, each of length L = n/M and rate r = bd/L. Thecode itself could simply be a repetition code, in which case allM frames are identical and each node in the cluster will di-versity combine [10] all frames that it has received. More gen-erally, incremental redundancy [10] could be used, wherebyeach frame is obtained by puncturing a rate r/M mothercode. With incremental redundancy, a different part of thecodeword is transmitted each time, and after the mth frame,a receiver will pass the rate r/m code that it has until then re-ceived through its decoder (code combining). As in [5], M iscalled the rate constraint.
During each slot, the source transmits the next ARQframe in the sequence, while all other nodes in the clusterlisten for the frame. The frames 1 ≤ m ≤ M are trans-mitted during consecutive slots s1, . . . , sM. Each frame hasa header that contains the ARQ frame sequence numberm : 1 ≤ m ≤ M, location of the source, and location of thedestination. The header is encoded separately by a rate r/Mcode so that all nodes in the cluster can decode every frame’sheader. To improve efficiency, an RTS-CTS dialogue could beused. An RTS packet could be sent prior to the ARQ frame.The RTS would contain the same information in the frameheader and would also be encoded by a rate r/M code. If thecurrent network configuration and interference conditionswill not allow the message to make any forward progress,the source could wait until more favorable conditions prevail.Details of the dialogue go beyond the scope of this paper, butare a straightforward modification of the handshaking pro-cedure discussed in [6, 7].
The source continues to transmit ARQ frames until ei-ther all M frames have been transmitted, the destination de-codes the message, or a relay is able to decode the messageand is elected to forward the message. In the case that nei-ther relay nor destination was able to decode the message,the process starts over with the source once again transmit-ting up to M frames. On the other hand, if relay Zr is ableto decode the message and is elected to forward the mes-sage, then it assumes the role of the source, and the processstarts over with the new source Zs = Zr transmitting up to Mframes. Finally, if the destination is able to decode the mes-sage, the process halts and the message is delivered to the ap-plication.
Nodes periodically make an independent decision towake up, go to sleep, or remain in the same state. Nodes maychange sleep states at one of two instances, depending on theversion of the HARBINGER protocol. In fast HARBINGER,
2Geographically advantaged nodes are closer to the destination than thesource is to the destination [6].
nodes may change state at the end of each slot, and so thenetwork topology is fixed for only one slot at a time. Inslow HARBINGER, nodes may only change state once ev-ery M slots. The M slots are arranged into a superslot thatis long enough for all M ARQ frames to be transmitted. Thehybrid-ARQ protocol is synchronized with the superslots sothat the first ARQ frame must be sent during the first slotof the superslot, and so on. This guarantees that the topol-ogy will remain fixed for all M ARQ frames, but also meansthat the network must wait until the start of the next su-perslot before the message can be forwarded from the newsource.
Each frame is transmitted by the source node Zs withaverage energy per symbol Es, which is assumed to be con-stant for all frames. For the sake of mathematical tractabil-ity, we follow [5] and assume that circularly symmetric com-plex Gaussian symbols are transmitted. The frame is receivedat node Zk ∈ C(s) \ Zs with average energy per symbolEk = Kod
−µk Es, where dk is the distance from Zs to Zk, µ is a
path loss exponent, and Ko is a constant that depends on thewavelength λc and free-space reference distance do [11].
The signal is received at Zk over an additive white Gaus-sian noise (AWGN) channel with signal-to-noise ratio (SNR)Ek/No, where No is the one-sided noise spectral density. Ifonly one frame was sent, the channel would have a capacity ofC = (1/2) log2(1+Ek/No). However, due to the use of hybrid-ARQ, node Zk could have received more than just one frame.Consider the case when node Zk has received m frames. Fora diversity combining system, the SNR adds [5], and thus thecapacity becomes Ck(m) = (1/2) log2(1 +mEk/No), while forcode combining, the capacities add [5], and thus Ck(m) =(m/2) log2(1 + Ek/No).
Any node Zk whose capacity after the mth transmissionis greater than the rate r will have accumulated enough in-formation to decode the message. Define the decoding setD(sm) ⊂ C(sm) to be the set of all nodes that have decodedthe message after the mth frame has been transmitted, thatis, D(sm) = Zk : Ck(m) > r. As soon as the destination isadmitted to the decoding set, the message is delivered to theapplication. Once a relay is added to the decoding set, it couldpotentially become the new source and forward the message.The two modifications of HARBINGER differ in how the for-warding relay is selected from the decoding set, as discussedin the next two sections.
2.1. Slow HARBINGER
In slow HARBINGER, the composition of the cluster C(s) re-mains fixed for all s : s1 ≤ s ≤ sM , that is, for an entire super-frame. After the mth frame has been transmitted, all nodeswithin some distance dm will be able to decode the messageand will be added to the decoding set. The distance dm isfound from the capacity expression and exponential path lossmodel to be
dm =(K0Es/No
22r/m − 1
)1/µ
(1)

Position-Based Relaying with Hybrid-ARQ 613
for code combining, and
dm =(mK0Es/No
22r − 1
)1/µ
(2)
for diversity combining. To remove dependency on the pa-rameters K0, Es/No, and the actual physical distances, we nor-malize the transmission distance so that the range that can bereached after the first ARQ frame is transmitted is unity. Wedenote normalized distance as Rm, so that R1 = 1 and
Rm =
(
22r − 122r/m − 1
)1/µ
for code combining,
m1/µ for diversity combining.(3)
Thus, under slow HARBINGER, D(sm) = Zk : Zk ∈C(sm), dk < Rm. We define the mth coverage band Bm to bethe geographically advantaged area that is between distanceRm−1 and Rm from the source. Band B0 is defined to containonly the source. We further define Bm′ to be the band thatcontains the node in the cluster that is closest to the destina-tion. If two or more nodes are at the same minimum distanceto the destination but in different bands, then Bm′ will be theband which is closer to the source (has smallest subscript). Ifm′ = 0, then the cluster contains only the source, and there-fore it should not transmit any ARQ frames during the cur-rent superslot (the source can determine if there are any othernodes in the cluster by sending out an RTS packet).
Since the sleep states are synchronized to only changeonce every M slots, the network must wait until the startof the next superslot before the message can be transmittedfrom a new source, that is, the message may only make for-ward progress once every M slots. Because of this, there aretwo very different strategies for picking which node in thecluster will forward the message. The first strategy, termedslow HARBINGER A, minimizes the source-destination la-tency, while the second strategy, termed slow HARBINGERB, minimizes the energy consumption.
Minimizing the latency is equivalent to maximizing theforward progress of the message. This is accomplished inslow HARBINGER A by selecting the forwarding node afterframe m′ is sent to be the relay that is closest to the destina-tion, that is, the Zk ∈ C(sm′) with the largest index k (sincenodes are indexed according to distance to the destination).Note that it is possible for more than one relay to be added tothe decoding set during the final hybrid-ARQ transmissionm′. This occurs if there are more than one relay in band Bm′ .In this case, a contention mechanism is needed to pick the re-lay that is closest to the destination. The contention schemefrom [6] could be adopted, which slices the cluster into sev-eral priority regions based on the distance to the destination.Nodes that are in the priority region closest to the destinationare given the opportunity to contend for the channel first. If
no nodes are found, then the second closest priority zone hasthe opportunity to contend, and so on. If multiple nodes arepresent in the same priority zone, a random backoff proce-dure can be used to further resolve the contention. Once aforwarding relay is selected, all nodes in the cluster may goback to sleep, with the forwarding relay waking up again atthe start of the next superslot.
Due to the exponential path loss effect, minimizing en-ergy consumption is equivalent to minimizing the numberof ARQ transmissions required for the message to make for-ward progress in each superslot. This is accomplished inslow HARBINGER B by selecting the forwarding node fromamong the first relays added to the decoding set. Once any re-lay is added to the decoding set, it will signal an acknowledg-ment and the source will stop transmitting frames. If multi-ple relays are added to the decoding set at the same time, thenthe same contention scheme used for slow HARBINGER Acan be used to select the relay that is closest to the destination(the contention scheme will also prevent acknowledgmentsfrom colliding).
2.2. Fast HARBINGER
With fast HARBINGER, the composition of the cluster C(s)may change after each slot. If a node Zk is located in coverageband Bj , then it will be able to decode the message after themth ARQ frame is transmitted if it was awake for the last jout of the m ARQ transmissions. Once a node wakes up andreceives the next ARQ frame, it must make a local decisionto stay awake or go back to sleep. The node will compare theARQ sequence number against its own location, and will goback to sleep if it will be unable to decode the message afterthe last (Mth) ARQ frame is transmitted. A node located inBj will go back to sleep if it wakes up after slot m = M − j.Otherwise, it will stay awake for the remaining ARQ trans-missions until either it decodes the message or another nodein the cluster decodes the message and sends an acknowl-edgment. Once a node is admitted to the decoding set, thesource stops transmitting and the node in the decoding setthat is closest to the destination begins to forward the mes-sage during the next slot. If more than one node are added tothe decoding set after the same frame, the same contentionscheme used by slow HARBINGER can be used to select thenode that is closest to the destination.
3. RECURSIVE ANALYSIS
The analysis of modified HARBINGER is a nontrivial gen-eralization of the analysis of GeRaF introduced in [6]. Theanalysis gives recursive upper and lower bounds on the aver-age end-to-end latency (in number of slots) and the averagenumber of ARQ transmissions for the message to be deliv-ered to the destination. The first metric is of interest becauseit quantifies the network delay, while the second metric is re-lated to energy consumption (since each ARQ frame is trans-mitted with equal energy). Because of the complexity of theanalysis, we only present the main results in this section. Fulldetails of the analysis can be found in the appendix.

614 EURASIP Journal on Wireless Communications and Networking
A(D, r1, r2)
(0, 0)Destination
(D, 0)Source
r1 r2
D
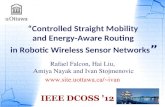
Figure 1: The area of intersection of two circles of radii r1 and r2
separated by a distance of D.
As with GeRaF, we assume that the active nodes are dis-tributed according to a two-dimensional Poisson process.This is an accurate model when the density of actual nodesis high and each node uses an exponential sleep timer [6].The analysis relies on certain features of Poisson processeswhich implies that (1) the number (|C(s)|) of active nodesin a cluster C(s) is a Poisson random variable; and (2) if thenode distribution of entire network is two-dimensional Pois-son with density ρ, then any region within the network willhave a Poisson node distribution with density ρ.
The source and destination are separated by D units,where a unit is the range of the first ARQ transmission R1 =1. To enable recursive calculation, space is divided into ν in-crements per unit distance. Each increment has length 1/ν.The upper and lower bounds coincide as ν → ∞. We de-fine the message transfer probability ω( j, k, b,m) to be a jointprobability, where j is the number of increments separatingthe source and destination, k is the forward progress (in in-crements) of the message during the current hop, b is thenumber of slots that have elapsed for the current hop, andm is the number of received ARQ frames during the cur-rent hop. We define the empty hop probability ω0( j) to be theprobability that no forward progress has been made in thecurrent hop when the source is j increments from the des-tination. In the following analysis, we assume that j > νRM ,that is, that direct communications is not possible betweensource and destination.
Let A(D, r1, r2) denote the area of intersection of two cir-cles with radii r1 and r2 separated by a center-to-center dis-tance of D. This area is indicated in Figure 1 and is computedusing
A(D, r1, r2
) = 2∫ r1
D−r2
arccos
(x2 + D2 − r2
2
2Dx
)x dx. (4)
3.1. Slow HARBINGER
As derived in the appendix, the lower bound on average mes-sage delay when the source and destination are separated byj ≤ νD increments is
n( j)=νRM∑k=1
M∑m=1
ω( j, k,M,m)(n( j−k)+M
)+ω0( j)
(n( j)+M
),
(5)
while the lower bound on the average number of ARQ trans-missions is
e( j) =νRM∑k=1
M∑m=1
ω( j, k,M,m)(e( j − k) + m
)+ ω0( j)e( j). (6)
The corresponding upper bound is found by replacing the( j − k) terms in (5) and (6) with ( j − k + 1).
The empty hop probability for slow HARBINGER (bothtypes) is given by
ω0( j) = exp− ρA
(j
ν,j
ν,RM
). (7)
The message transfer probability depends on the type ofprotocol. For slow HARBINGER A, it is
ω( j, k,M,m)
= exp− ρA
(j
ν,j − k
ν,RM
)
·[
expρ(A(j
ν,j − k
ν,Rm−1
)
− A(j
ν,j − k + 1
ν,Rm−1
))
− expρ(A(j
ν,j − k
ν,Rm
)
− A(j
ν,j − k + 1
ν,Rm
))],
(8)
while for slow HARBINGER B, it is
ω( j, k,M,m)
= exp− ρA
(j
ν,j
ν,Rm−1
)
·[
exp− ρ
(A(j
ν,j − k
ν,Rm
)
− A(j
ν,j − k
ν,Rm−1
))
− exp− ρ
(A(j
ν,j − k + 1
ν,Rm
)
− A(j
ν,j − k + 1
ν,Rm−1
))].
(9)
The end-to-end delay is computed recursively. For slowHARBINGER A, the recursion starts from a distance separa-tion of νRM + 1 increments, that is, the index j in (5) and(6) is initially set to j′ = νRM + 1. For slow HARBINGER B,

Position-Based Relaying with Hybrid-ARQ 615
the recursion starts at j′ = νR1 + 1. The initial conditions forthe recursion are n( j) = M for j ≤ νRM and e( j) = m forνRm−1+1 ≤ j ≤ νRm, where 1 ≤ m ≤M. During the first stepof the recursion, the message delay n( j′) and number of ARQtransmissions e( j′) are computed for the initial condition j′.These results are then used to compute the message delay atincrement j = j′ + 1. The process continues recursively, un-til the message delay and number of ARQ transmissions atincrement j = νD are computed.
3.2. Fast HARBINGER
Because the composition of the cluster C(s) changes aftereach slot in fast HARBINGER, its statistics are different thanslow HARBINGER’s. In particular, the lower bound on av-erage message delay when the source and destination areseparated by j ≤ νD increments is
n( j)=νRM∑k=1
M∑b=1
b∑=1
ω( j, k, b, )(n( j−k)+b
)+ω0( j)
(n( j)+M
),
(10)
and the lower bound on the average number of ARQ trans-mission is
e( j) =νRM∑k=1
M∑b=1
b∑=1
ω( j, k, b, )(e( j−k)+
)+ω0( j)e( j). (11)
The corresponding upper bound is found by replacing the( j − k) terms in (10) and (11) with ( j − k + 1).
For fast HARBINGER, the empty hop probability is
ω0( j) =M∏i=1
exp− ρA
(j
ν,j
ν,Ri
), (12)
while the message transfer probability is
ω( j, k, b,m)=Ω( j, k, b,m)−Ω( j, k, b,m− 1) for m ≤ b,
0 otherwise,(13)
where
Ω( j, k, b,m)
=(
exp− ρA
(j
ν,j
ν,RM
))b−m
×(m−1∏
i=1
exp− ρA
(j
ν,j
ν,Ri
))
·[
exp− ρA
(j
ν,j − k
ν,Rm
)
− exp− ρA
(j
ν,j − k + 1
ν,Rm
)].
(14)
The end-to-end delay and number of ARQ transmissionsare computed recursively just as in slow HARBINGER. Theinitial conditions are identical to that of slow HARBINGERB, and in particular j′ = νR1 + 1, n( j) = 1 for j ≤ νR1, ande( j) = 1 for j ≤ νR1.
4. NUMERICAL RESULTS
In this section, both analytical and simulation results are pre-sented to illustrate the behavior of modified HARBINGERand demonstrate its advantage over GeRaF. The simulationsetup is discussed in Section 4.1. Since code combining al-lows the coverage circles Rm to expand at a faster rate thanwith diversity combining, we begin by presenting numericalresults for code combining. The average latency and numberof ARQ transmissions are presented for code combining inSections 4.2 and 4.3, respectively. A comparison of code com-bining and diversity combining is then given in Section 4.4.Finally, the impact of the path loss exponent µ is assessed inSection 4.5.
4.1. Simulation setup
To validate the analysis, a set of computer simulations wasexecuted. In each simulation trial, the source and relay arefirst located a fixed distance D apart. The relay topologyis then periodically created at random according to a two-dimensional Poisson process with density ρ. Note that thenumber of nodes located within a coverage area of size A is initself a Poisson random variable with mean ε = ρA. The ho-mogeneous Poisson distribution is generated following themethodology of [12] by first generating a Poisson randomvariable with mean ε = ρA to determine the number P ofnodes within the area of interest, and then independentlyplacing each node within the area according to a uniform dis-tribution.
The rate that the network topology changes depends onthe version of HARBINGER. For slow HARBINGER, thecluster composition remains fixed for an entire superslotat a time. Thus, the simulation must draw from the Pois-son process only once per superslot. If the cluster containsmore than just the source, then the message will make for-ward progress, otherwise a new distribution is drawn. Ineither case, a message delay counter is incremented by Mslots. For slow HARBINGER A, the message progresses toeither the relay in the cluster that is closest to the destina-tion or to the destination itself (if it is in the cluster). Forslow HARBINGER B, the message progresses to either themost geographically advantaged node that is first added tothe decoding set or to the destination itself if it is added tothe decoding set first. Each time the message makes forwardprogress, an ARQ frame counter is incremented by amount κif the node that the message progresses to is in band Bκ. Oncethe message reaches the destination, the simulation halts anda new trial is run. For each set of simulation parameters, 5000trials are run.
For fast HARBINGER, it is necessary to update the clus-ter configuration prior to each slot. Note that the sequence of

616 EURASIP Journal on Wireless Communications and Networking
0 1 2 3 4 5 6 7 8 9 10
Active node density
5
10
15
20
25
30
Ave
rage
dela
y
Upper boundLower boundGeRaFM = 2
M = 3M = 12Simulation
Figure 2: Upper and lower bounds on message delay (in units of su-perslots) for slow HARBINGER A under different rate constraintsM, where the perframe code rate r = 1, path loss exponent µ = 3,ν = 50 increments per unit distance, source-destination distanceD = 10, and code combining hybrid-ARQ is used. GeRaF corre-sponds to the case that M = 1.
cluster configurations is actually a correlated Poisson processbecause nodes located in band Bj that wake up prior to slotsm will stay awake during slot sm+1 if m ≤M− j. Prior to slots1, a two-dimensional Poisson process is generated for eachcoverage band B1, . . . ,BM. What happens next depends onwhether these coverage bands are empty or not. If all Mcoverage bands are empty, then prior to slot s2, a new two-dimensional Poisson process is created for coverage bandsB1, . . . ,BM−1. Note that nodes do not need to be placed inband BM because they will wake up too late to decode themessage. On the other hand, if some band Bκ is nonemptyafter slot s1, then prior to slot s2, a new two-dimensionalprocess is created for each coverage band B1, . . . ,Bκ−1. Inthis case, new nodes do not need to be placed in band Bκ
or higher because the node already in band Bκ will be ableto decode the message earlier. This entire process continuesrecursively until either the Mth ARQ frame is transmittedor the message makes forward progress. If the message didnot make any forward progress, then an ARQ frame counterand a delay counter will be incremented by M, and the pro-cess will start over again from the same source node. On theother hand, if the message does make forward progress, thenthe two counters will be incremented by the message delay band the actual number of transmitted ARQ frames m, respec-tively. If the message progresses to a relay, then the processwill start over at the relay (which becomes the new source).Otherwise, if the message progresses to the destination, thenthe trial will halt and the simulation will move on to the nexttrial.
0 1 2 3 4 5 6 7 8 9 10Active node density
10
12
14
16
18
20
22
24
26
28
30
Ave
rage
dela
y
GeRaFM = 2M = 3
M = 12Simulation
Figure 3: Lower bounds on message delay (in units of super-slots) for slow HARBINGER B under the same conditions used inFigure 2.
4.2. Message delayBounds on message delay for both slow HARBINGER andfast HARBINGER are plotted in Figures 2, 3, and 4 for per-frame code rate r = 1, path loss exponent µ = 3, ν = 50 in-crements per unit distance, source-destination distance D =10, and several values of the rate constraint M. The figuresshow the average end-to-end delay versus the node density ρ,where delay is in units of superslots for slow HARBINGERand in units of slots for fast HARBINGER and the node den-sity is in units of nodes per unit area. In each Figure, the per-formance of GeRaF (M = 1) is included for reference. Alsothe corresponding simulation results are shown. Figure 2shows both upper and lower bounds for slow HARBINGERA. Note that the two bounds are close to one another andthat the simulation result lies between these two bounds. Thetightness of the bounds is a function of the number of incre-ments ν per unit distance, and as ν → ∞, the bounds gettighter. Due to the tightness of both bounds, we will onlyshow lower performance bounds for the rest of this paper.
In Figure 2, we observe that the message delay in slowHARBINGER A decreases significantly with increasing Mfor all node densities. This result is rather intuitive, sincefrom the message delay perspective, slow HARBINGER Ais essentially GeRaF with its coverage radius expanded toRM . Asymptotically, as the active node density ρ → ∞,the message delay will converge to D/RM + 1. Unlikeslow HARBINGER A, both slow HARBINGER B and fastHARBINGER have a similar delay performance as that ofGeRaF in a relatively dense network, as shown in Figures 3

Position-Based Relaying with Hybrid-ARQ 617
0 1 2 3 4 5 6 7
Active node density
15
20
25
30
35
40
Ave
rage
dela
y
GeRaFM = 2M = 3
M = 12Simulation
Figure 4: Lower bounds on message delay (in units of slots) for fastHARBINGER under the same conditions used in Figure 2.
and 4. In fact, they all asymptotically converge to a mes-sage delay of D + 1 as node density ρ → ∞. The majorbenefit of HARBINGER is in sparse networks, that is, whereρ → 0. From these figures, it is apparent that the same aver-age delay can be achieved with a lower node density by usingHARBINGER instead of using GeRaF. For instance, considerfast HARBINGER with a delay of 25 slots. Using GeRaF, thedensity needs to be around ρ = 3 to achieve this delay. But byusing fast HARBINGER with just M = 2, the required den-sity is reduced to ρ = 2. By increasing M to 12, the requireddensity is around ρ = 1.5 or about half what is needed forGeRaF, implying that the nodes may be asleep twice as often.It is interesting to note that the performance for M = 3 isnearly identical to that of M = 12 suggesting that diminish-ing returns kick in quickly and high values of M might notbe needed in practice.
For both slow HARBINGER A and fast HARBINGER,the delay is a monotonically decreasing function of nodedensity. However, an interesting phenomenon we observedfor slow HARBINGER B in Figure 3 is that as the rate con-straint gets fairly large, that is, M = 12, the delay is not amonotonic function of density. In particular, in low-densitynetworks and for M = 12, the message delay actually de-creases along with the node density. This observation iscounterintuitive, but can be explained. Recall that with slowHARBINGER B, the forwarding node is selected from amongthe relays that are added to the decoding set first. In a densenetwork, the forwarding node will almost always be withinband B1 and so there will not be much forward progress.However, as the density decreases, the probability that theforwarding node is in B1 decreases. In a less-dense network,it becomes likely that the forwarding node is in some further
0 0.5 1 1.5 2 2.5
Active node density
0.6
0.65
0.7
0.75
0.8
0.85
Mes
sage
adva
nce
men
tp
ersl
ot
D = 10D = 3
Figure 5: The average message advancement per slot for slowHARBINGER B with rate constraint M = 12 for source-destinationseparation D = 3 and 10, perframe code rate r = 1, path loss expo-nent µ = 3, ν = 50 increments per unit distance, and code combin-ing.
ring Bm, where m > 1, implying that each hop will have moreforward progress.
To further explain this phenomenon, Figure 5 shows theaverage message advancement Avg( j) in the network per su-perslot as a function of node density, where
Avg( j) =νRM∑k=1
M∑m=1
(k
ν
)ω( j, k,M,m). (15)
Notice that in Figure 5, the message progress is actually largerin networks with lower density, indicating that nodes closerto the destination are more likely to be chosen as a relay. Thisleads to smaller end-to-end delay at low node densities, asshown in Figure 3.
4.3. Number of ARQ transmissions
In this section, we investigate the average number of ARQtransmissions required for the message to reach the destina-tion. Since all ARQ frames are transmitted with the same en-ergy, the average number of ARQ transmissions is related tothe energy efficiency of the protocol. We note that there areother issues that impact the energy efficiency of the proto-col, such as how RTS, CTS, and other signaling packets arehandled. However, these issues are highly implementation-dependent and outside the scope of the paper. Also, the en-ergy consumed transmitting short control packets is gener-ally less than the energy when transmitting the longer mes-sage frames. Another very important issue dictating energyefficiency is the duty cycle of the nodes themselves, as often

618 EURASIP Journal on Wireless Communications and Networking
0 1 2 3 4 5 6 7
Active node density
15
20
25
30
35
40
Ave
rage
nu
mbe
rof
AR
Qtr
ansm
issi
ons
M = 12M = 3M = 2
GeRaFSimulation
Figure 6: Lower bound on the average number of ARQ transmis-sions per message in slow HARBINGER A under the same condi-tions used in Figure 2.
0 1 2 3 4 5 6 7
Active node density
14
16
18
20
22
24
26
28
30
32
Ave
rage
nu
mbe
rof
AR
Qtr
ansm
issi
ons
M = 12M = 3M = 2
GeRaFSimulation
Figure 7: Lower bound on the average number of ARQ transmis-sions per message in slow HARBINGER B under the same condi-tions used in Figure 2.
the energy required for a node just to stay awake is similar tothe amount of RF power required for it to transmit [4].
As with the delay, the upper and lower bounds on thenumber of end-to-end ARQ transmissions are tight for suffi-ciently high ν (e.g., the ν = 50 used here), and so in this sec-tion, we only plot the lower bounds for all three versions ofHARBINGER in Figures 6, 7, and 8 for r = 1, µ = 3, ν = 50,and D = 10. Simulation results are also provided. Noticethat in all three figures, HARBINGER requires more frames
0 1 2 3 4 5 6 7
Active node density
16
18
20
22
24
26
28
Ave
rage
nu
mbe
rof
AR
Qtr
ansm
issi
ons
M = 12M = 3M = 2
GeRaFSimulation
Figure 8: Lower bound on the average number of ARQ transmis-sions per message in fast HARBINGER under the same conditionsused in Figure 2.
to be transmitted per message than GeRaF, and the numberof required transmissions increases with M. At first glance,this would imply that the energy efficiency of HARBINGERis much worse than that of GeRaF. This would be true ifthe energy-latency tradeoff was the same and if nodes onlyconsumed energy when they transmitted. However, the keybenefit of HARBINGER is that it allows a lower node den-sity to achieve the same latency target, and thus nodes cansave a very significant amount of energy by remaining in asleep state for a higher proportion of time. We also note that,as shown in [1], additional energy savings can be achievedby removing the memory-flushing condition from the net-work, though this greatly complicates the analysis and re-quires nodes to remain in a ready state longer.
Further, notice that although both slow HARBINGERand fast HARBINGER require more ARQ transmissions thanGeRaF in low-density networks, they all converge to GeRaFin high-density networks. In fact, as ρ → ∞, both slowHARBINGER B and fast HARBINGER asymptotically re-quire D + 1 ARQ transmissions for each message. As Mgets fairly large, that is, M = 12, the message delay of fastHARBINGER is almost equivalent to the average numberof ARQ transmissions per message, indicating that with fastHARBINGER, there almost always exists at least one relayin the first coverage band (B1). Since the delay performanceyields diminishing returns of high values of M and the num-ber of ARQ transmissions increases with M, it seems mostappropriate to pick a rate constraint of about M = 2 orM = 3. Fortunately, use of a lower rate constraint also sim-plifies many of the implementation details.
4.4. Diversity combining versus code combining
HARBINGER with incremental redundancy and code com-bining always outperforms its repetition coding and diversity

Position-Based Relaying with Hybrid-ARQ 619
0 1 2 3 4 5 6 7
Active node density
15
20
25
30
35
40
Ave
rage
dela
y
Diversity combiningCode combining
M = 2M = 12
Figure 9: Lower bound on message delay (in slots) for fastHARBINGER with diversity combining and code combining underrate constraints M = 2, 12, perframe code rate r = 1, path lossexponent µ = 3, ν = 50 increments per unit distance, and source-destination distance D = 10.
0 1 2 3 4 5 6 7Active node density
16
18
20
22
24
26
28
30
32
Ave
rage
nu
mbe
rof
AR
Qtr
ansm
issi
ons
Diversity combiningCode combining
M = 12M = 2
Figure 10: Lower bound on the average number of ARQ trans-missions required per message for fast HARBINGER with diversitycombining and code combining under the same conditions used inFigure 9.
combining counterpart. However, code combining is morecomplex than diversity combining, and therefore will requiremore complicated hardware which consumes more powerto process the ARQ frames. The question remains whetherthe extra complexity required by code combining is justi-fied by its superior performance. In Figures 9 and 10, wecompare the performance of fast HARBINGER with code
1 2 3 4 5 6 7 8 9 10
Node density
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
mes
sage
dela
yw
ith
resp
ect
toG
eRaF
HARBINGER µ = 2HARBINGER µ = 3
HARBINGER µ = 4HARBINGER µ = 5
Figure 11: The influence of different propagation exponents on thelatency of fast HARBINGER (relative to GeRaF) with rate constraintM = 2, code combining, perframe code rate r = 1, ν = 50 incre-ments per unit distance, and source-destination distance D = 10.
combining against fast HARBINGER with diversity combin-ing for M = 2 and 12. The extension to slow HARBINGERis straightforward. We observe that diversity combining per-forms consistently worse than code combining in terms ofmessage delay and energy efficiency. However, under a smallrate constraint, for example, M = 2, the energy-efficiencyimprovement of code combining over diversity combiningbecomes marginal. If we further take into account the pro-cessing energy savings in the receiver, diversity combiningturns out to be a very attractive low-cost extension to theGeRaF protocol. In addition, we note that HARBINGER withcode combining reduces to its diversity combining counter-part for low per-block code rate r since
limr→0
(22r − 1
22r/m − 1
)1/µ
= limr→0
(2r ln 2 + O
(r2)
2r ln 2/m + O(r2))1/µ
= m1/µ.
(16)
4.5. Path loss effect
While the previous results were entirely for a path loss ex-ponent µ = 3, we also explored the impact of µ on the per-formance of the HARBINGER protocol. In particular, Fig-ures 11 and 12 show the delay of fast HARBINGER, normal-ized with respect to the delay of GeRaF, for M = 2, 12 andµ = 2, 3, 4, 5. Notice that HARBINGER always providesconsiderable gain in terms of average delay over GeRaF re-gardless of propagation coefficient, although the gain tendsto decrease in environments with high path loss.

620 EURASIP Journal on Wireless Communications and Networking
1 2 3 4 5 6 7 8 9 10
Node density
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
mes
sage
dela
yw
ith
resp
ect
toG
eRaF
HARBINGER µ = 2HARBINGER µ = 3
HARBINGER µ = 4HARBINGER µ = 5
Figure 12: The influence of different propagation exponents on thelatency of fast HARBINGER (relative to GeRaF) with rate constraintM = 12 and the other conditions used in Figure 11.
5. CONCLUSIONS
By introducing a cross-layer hybrid-ARQ mechanism intothe GeRaF protocol, significant improvements in the trade-off between latency and active node densities can be achieved.While the total number of transmitted ARQ packets increaseswith the rate constraint M of the hybrid-ARQ mechanism,most of the latency improvements are realized when thehybrid-ARQ protocol uses small values of M, such as M = 2or 3. For such values of M, it is possible to reduce the ac-tive node density by a factor of two or more, implying thatnodes will be able to conserve a significant amount of energyby remaining asleep longer. Alternatively, for the same nodedensities, a lower end-to-end latency can be achieved.
In this paper, the channel was impaired by only expo-nential path loss and AWGN. Furthermore, it was assumedthat the hybrid-ARQ mechanism used capacity-approachingcoding and that the control signaling was perfect. The benefitof making these assumptions is that it permits an elegant re-cursive analysis that very accurately bounds the information-theoretic performance limits. These limits show the bene-fit of the proposed modified HARBINGER protocols relativeto GeRaF and serve as a motivation for further study intopractical aspects of the protocol. Issues that should be con-sidered in future research include the practical implemen-tation of control signaling; the performance of actual FECcodes, modulation formats, and receivers; and the impact ofinterference, collisions, and fading. However, such effects arequite complicated and can only be assessed through simula-tion which can be very time-intensive for large networks.
APPENDIX
Suppose the source is located at coordinates (D, 0) and thedestination at (0, 0), as in [6]. First define the coverage disk
Om to be the circular region with radius Rm and center (D, 0).Themth coverage ring Rm is then defined asRm = Om−Om−1.Nodes in Rm require m ARQ frames to decode the message.Under rate constraint M, there are altogether M coveragerings.
Likewise, the distance disk Qk is defined as a circular re-gion with radius k/ν and center (0, 0), where ν denotes thenumber of increments per unit distance. The kth distance in-tervalk is defined ask = Qk −Qk−1. With a quantizationlevel 1/ν, the separation distance D between the source anddestination is divided into νD distance intervals. Finally, wedefine the coverage band Bm as the geographically advantagedregion in themth coverage ring, for example, Bm = Rm∩QνD.
The coverage rings and distance intervals divide thegeographically advantaged region OM ∩ QνD into a two-dimensional grid of partitions. Each partition Sm, j is definedas the intersection of the mth coverage ring and the jth dis-tance interval,
Sm, j =
(Om −Om−1
)∩ (Qj −Qj−1)
for(D − Rm
)ν + 1 ≤ j ≤ νD, 1 ≤ m ≤M,
∅ for j <(D − Rm
)ν + 1, 1 ≤ m ≤M,
(A.1)where m and j are nonnegative integers. Any active node inSm, j is able to decode the message by receiving exactlymARQframes from the source. It is straightforward to show that
⋃m
⋃j
Sm, j = OM ∩QνD,
Sm, j ∩ Sn,k = ∅ if m = n, or j = k.
(A.2)
We further define the following regions:
Sm−, j =m⋃n=1
Sn, j = Om ∩(Qj −Qj−1
),
Sm, j− =j⋃
k=1
Sm,k =(Om −Om−1
)∩Qj ,
Sm−, j− =m⋃n=1
j⋃k=1
Sn,k = Om ∩Qj.
(A.3)
Notice that (A.3) are general definitions which may result inan empty set under certain conditions, for instance when j ≤(D − Rm)ν, Sm−, j− = ∅.
Let Xt•, denote the event that region S•, contains at leastone potential relay during the tth slot, where “•” correspondsto either m or m− in (A.3) and “” corresponds to either jor j− in (A.3). Whenever S•, = ∅, its corresponding eventprobabilities are Xt•, = 0 and Xt•, = 1 (a bar over an eventdenotes its complement). Although the time index t is neces-sary to trace the performance of fast HARBINGER, for slowHARBINGER, Xt•, simply reduces to X•,, since the networktopology remains fixed for the entire superslot.
In this appendix, we will derive two importantevent probabilities, namely ω(νD, k, b,m) and ω0(νD).ω(νD, k, b,m) is a joint probability, where νD is the number

Position-Based Relaying with Hybrid-ARQ 621
of increments separating the source and destination, k is theforward progress (in increments) of the message during thecurrent hop, b is the number of slots that have elapsed for thecurrent hop, and m is the number of received ARQ framesduring the current hop. We define the empty hop probabil-ity ω0( j) to be the probability that no forward progress hasbeen made in the current hop when the source is j incre-ments from the destination.
A. Slow HARBINGER
Slow HARBINGER with a coverage radius RM is a straight-forward extension of GeRaF in the sense that its networktopology remains fixed every superslot, therefore every hopalways takes M slots. Different relay selection criteria lead tothe two variations on slow HARBINGER, and consequentlyaffect the event probability ω(νD, k, b,m). In particular, slowHARBINGER A selects a relay that is within the distance ringwith smallest index (closest to the destination) to minimizethe message delay, while slow HARBINGER B selects a relaythat is within the coverage ring with smallest index (reach-able with minimum number of ARQ frames) to minimizethe number of ARQ transmissions.
First consider slow HARBINGER A. When D > RM ,in order to make a forward progress of k increments inthe current hop with m ARQ frames, SM− ,(νD−k)− shouldbe empty (otherwise, a forward progress larger than k in-crements might occur). In addition, S(m−1)−,νD−k+1 shouldbe empty (otherwise, fewer ARQ frames are necessaryto achieve the same forward progress), while Sm,νD−k+1
should be nonempty. Likewise, in order to make thesame forward progress with m ARQ frames under slowHARBINGER B, bands B1, . . . ,Bm−1 should be empty. Inaddition, Sm,(νD−k)− in band Bm should be empty whileSm,νD−k+1 should be nonempty. Therefore, the joint proba-bility ω(νD, k,M,m) becomes
ω(νD, k,M,m)
=
PrXM−,(νD−k)−
PrXm,νD−k+1 ∩ X(m−1)−,νD−k+1
for slow HARBINGER A,
PrX(m−1)−,(νD)−
PrXm,νD−k+1 ∩ Xm,(νD−k)−
for slow HARBINGER B.
(A.4)
An empty hop occurs when all coverage bands are empty,therefore
ω0(νD) = PrXM−,(νD)−
. (A.5)
Given a two-dimensional Poisson process, individualevent probabilities in (A.4) and (A.5) could be evaluated as
PrXM−,(νD−k)−
= exp− ρA
(D,D − k
ν,RM
),
PrX(m−1)−,(νD)−
= exp− ρA
(D,D,Rm−1
),
PrXm,νD−k+1 ∩ X(m−1)−,νD−k+1
=exp
ρ(A(D,D− k
ν,Rm−1
)−A
(D,D− k − 1
ν,Rm−1
))
−expρ(A(D,D− k
ν,Rm
)−A
(D,D− k − 1
ν,Rm
)),
PrXm,νD−k+1 ∩ Xm,(νD−k)−
=exp− ρ
(A(D,D − k
ν,Rm
)− A
(D,D − k
ν,Rm−1
))
− exp− ρ
(A(D,D − k − 1
ν,Rm
)
− A(D,D − k − 1
ν,Rm−1
)),
PrXM−,(νD)−
= exp− ρA
(D,D,RM
),
(A.6)
where A(D, r1, r2) denote the area of intersection of two cir-cles with radii r1 and r2 separated by a center-to-center dis-tance of D. This area is indicated in Figure 1 and is computedusing (4).
On the other hand, when D ≤ RM and particularly ifthe destination is located in the pth coverage band, the ge-ographically advantaged region is not empty, therefore
ω0(νD) ≡ 0. (A.7)
In this case, slow HARBINGER A will forward the messagedirectly to the destination during the very first hop, and thus
ω(νD, k,M,m) =1, m = p,
0 otherwise.(A.8)
With slow HARBINGER B, nodes closer to the sourcemight be chosen as the forwarding relay, therefore
ω(νD, k,M,m)
=
PrX(p−1)−,(νD)−
for k = νD, m = p,
PrX(m−1)−,(νD)− ∩ Xm,νD−k+1 ∩ Xm,(νD−k)−
for k ≤ Rp−1ν, m ≤ p − 1,
0 otherwise.(A.9)
B. Fast HARBINGER
Unlike slow HARBINGER, cluster C(s) changes from slot toslot. The source has no a priori knowledge regarding whichnode will be chosen as the forwarding relay and when. There-fore, the message delay and number of ARQ transmissionsrequired for each hop are heavily influenced by the time-varying nature of network.
First, consider the event probability of empty hop. Anempty hop occurs if and only if the following joint eventoccurs: bands B1,B2, . . . ,BM, for example SM−,(νD)− , areempty during s1; bands B1,B2, . . . ,BM−1, for exampleS(M−1)−,(νD)− , are empty during s2; and so forth; band B1,

622 EURASIP Journal on Wireless Communications and Networking
for example, S1− ,(νD)− , is empty during sM . Notice that durings2, band BM does not need to be empty because it does notaffect the event probability of empty hop. In particular, nodesin band BM need M ARQ frames to decode the message.When they just awake during s2, they have already missedthe first ARQ frame and the remaining M − 1 ARQ framesare not enough for these nodes to decode. For the samereason, only S(M−2)−,(νD)− needs to be empty during s3, andso forth and S1− ,(νD)− needs to be empty during sM . There-fore, the corresponding event probability could be summa-rized as
ω0(νD) = Pr
M⋂t=1
Xt(M+1−t)−,(νD)−
. (A.10)
Deriving ω(νD, k, b,m) for fast HARBINGER is fairlycomplicated. Instead, we study a slightly different event prob-ability Ω(νD, k, b,m). Ω(νD, k, b,m) is a joint event proba-bility, where k denotes the forward progress, b denotes themessage delay, and m indicates that at most m ARQ frameswill be transmitted in the current session/hop.
It is straightforward to show that
ω(νD, k, b,m) = Ω(νD, k, b,m)−Ω(νD, k, b,m−1). (A.11)
Consider D > RM . As a simple example, first assume thatM = 2. Notice that m ≤ b; thus Ω(νD, k, b,m) has no-zerovalue only for three cases, for example, b = 1, m = 1; b = 2,m = 1; and b = 2, m = 2. More specifically, their corre-sponding event probability is
Ω(νD, k, b,m) =
PrX1
1,(νD−k)− ∩ X11,νD−k+1
, b = m = 1,
PrX1
2−,(νD)− ∩ X21,(νD−k)− ∩ X2
1,νD−k+1
, b = 2, m = 1,
PrX1
1−,(νD)− ∩ X12,(νD−k)− ∩ X2
1,(νD−k)− ∩(X2
1,νD−k+1 ∪ X12,νD−k+1
), b = m = 2.
(A.12)
The expressions for Ω(νD, k, 1, 1) and Ω(νD, k, 2, 1) are quiteintuitive, and thus the discussion will be focused on jointevent probability Ω(νD, k, 2, 2). In particular, band B1 shouldbe empty during s1 (otherwise, the current session/hop willterminate with only 1 slot of message delay). In addition,S2,(νD−k)− should be empty during s1 and S1,(νD−k)− shouldbe empty during s2, otherwise a message progress greaterthan k increments might occur. Finally, to make a for-ward progress of k increments, distance interval νD−k+1
should be nonempty. In particular, a nonempty S1,νD−k+1
during s2 and/or a nonempty S2,νD−k+1 during s1 ensuresthat at most 2 ARQ frames are transmitted during thehop.
Following the same rationale, (A.12) could be generalizedfor M > 2. In particular, in order to make a forward progressof k increments with b slots of message delay and at most mARQ frames, the following sequence of events should occur.First of all, bands B1,B2, . . . ,Bm−1 should be empty dur-ing sb−m+1; bands B1,B2, . . . ,Bm−2 should be empty duringsb−m+2; . . . ; bands B1 should be empty during sb−1 (oth-erwise, the current session/hop will terminate with a de-lay smaller than b). Secondly, bands B1,B2, . . . ,BM shouldbe empty during s1, s2, . . . , sb−m (otherwise, more than mARQ frames will be transmitted). In addition, Sm,(νD−k)−
should be empty during sb−m+1; Sm+1,(νD−k)− should be emptyduring sb−m+2; and so forth; S1,(νD−k)− should be empty dur-ing sb (otherwise, a forward progress greater than k incre-ments might occur). Finally, to make a forward progress of kincrements in the current hop, at least one of the followingevents should occur: a nonempty Sm,(νD−k+1)− during sb−m+1;
a nonempty Sm−1,(νD−k+1)− during sb−m+2; and so forth; anonempty S1,(νD−k+1)− during sb. In summary,
Ω(νD, k, b,m)
= Pr
( b−m⋂t=1
XtM−,(νD)−
)∩( b−1⋂
t=b−m+1
Xt(b−t)−,(νD)−
)
∩( m⋂
l=1
Xb+1−ll,(νD−k)−
)∩( m⋃
l=1
Xb+1−ll,νD−k+1
),
(A.13)
which could be further decomposed into a product of condi-tional probabilities
Ω(νD, k, b,m)
= Pr
( m⋂l=1
Xb+1−ll,(νD−k)−
)∩( m⋃
l=1
Xb+1−ll,νD−k+1
)
∣∣∣∣∣( b−m⋂
t=1
XtM−,(νD)−
)∩( b−1⋂
t=b−m+1
Xt(b−t)−,(νD)−
)
Pr
( b−1⋂t=b−m+1
Xt(b−t)−,(νD)−
)∣∣∣∣∣( b−m⋂
t=1
XtM−,(νD)−
)
× Pr
( b−m⋂t=1
XtM−,(νD)−
).
(A.14)
Given a two-dimensional Poisson distributed network, whenpartition A of the network is empty during si, the node

Position-Based Relaying with Hybrid-ARQ 623
distribution of partition B will follow Poisson process duringsi+1 as long as partition B is a subset of partition A. Therefore,each term in (A.14) could be computed as
Pr
b−m⋂t=1
XtM−,(νD)−
= PrX1M−,(νD)−
PrX2M−,(νD)−
∣∣X1M−,(νD)−
· · ·× Pr
Xb−mM−,(νD)−
∣∣∣∣∣b−m−1⋂t=1
XtM−,(νD)−
= (PrXM−,(νD)−
)b−m= ( exp
− ρA(D,D,RM
))b−m
Pr
b−1⋂t=b−m+1
Xt(b−t)−,(νD)−
∣∣∣∣∣b−m⋂t=1
XtM−,(νD)−
= PrX(m−1)−,(νD)−
PrX(m−2)−, j−
· · ·PrX1−,(νD)−
=m−1∏i=1
exp− ρA
(D,D,Ri
),
Pr
( m⋂l=1
Xb+1−ll,(νD−k)−
)∩( m⋃
l=1
Xb+1−ll,νD−k+1
)
∣∣∣∣∣( b−m⋂
t=1
XtM−,(νD)−
)∩( b−1⋂
t=b−m+1
Xt(b−t)−,(νD)−
)
= Pr
( m⋂l=1
Xl,(νD−k)−
)∩( m⋃
l=1
Xl,νD−k+1
)
= exp− ρA
(D,D − k
ν,Rm
)
− exp
− ρA
(D,D − k − 1
ν,Rm
).
(A.15)
Likewise, the closed-form expression for ω0(νD) be-comes
ω0(νD) =M∏i=1
exp− ρA
(D,D,Ri
). (A.16)
When D ≤ RM , the destination is located in OM , there-fore the geographically advantaged region is not empty, thusw0(νD) ≡ 0 and Ω(νD, k, b,m) = 0 when m = b. Morespecifically, suppose that the destination is located within thepth coverage band. If a forward progress of k ≤ νRp−1 is to bemade with a message delay b ≤ p − 1, the event probabilitybecomes
Ω(νD, k, b, b)
= Pr
( b−1⋂m=1
Xb−mm−,(νD)−
)∩( b⋂
m=1
Xb+1−mm,(νD−k)−
)
∩( b⋃
m=1
Xb+1−mm,νD−k+1
)
= Pr
( b⋂m=1
Xb+1−mm,(νD−k)−
)∩( b⋃
m=1
Xb+1−mm,νD−k+1
)
∣∣∣∣∣( b−1⋂
m=1
Xb−mm−,(νD)−
)Pr
b−1⋂m=1
Xb−mm−,(νD)−
=[
exp
− ρA
(D,D − k
ν,Rb
)
− exp
− ρA
(D,D − k − 1
ν,Rb
)]
·b−1∏i=1
exp− ρA
(D,D,Ri
). (A.17)
If on the other hand, to make a forward progress of k >νRp−1, the destination should always be chosen as the relay,thus b = p and k = νD,
Ω(νD, k, b, b) = Pr
( b−1⋂m=1
Xb−mm−,(νD)−
)
=b−1∏i=1
exp− ρA
(D,D,Ri
).
(A.18)
Otherwise, Ω(νD, k, b, b) = 0.
ACKNOWLEDGMENTS
This work was supported by the Office of Naval Researchunder Grant N00014-00-0655. Parts of this paper have ap-peared at the 2004 IEEE Military Communications Confer-ence (MILCOM) and the 2004 IEEE Global Telecommunica-tions Conference (GLOBECOM).
REFERENCES
[1] B. Zhao and M. C. Valenti, “Practical relay networks: A gen-eralization of hybrid-ARQ,” IEEE J. Select. Areas Commun.,vol. 23, no. 1, pp. 7–18, 2005.
[2] J. E. Wieselthier, G. D. Nguyen, and A. Ephremides, “Re-source management in energy-limited, bandwidth-limited,transciever-limited wireless networks for session-based multi-casting,” Computer Networks, vol. 39, no. 2, pp. 113–131, 2002.
[3] J. N. Laneman, D. N. C. Tse, and G. W. Wornell, “Coopera-tive diversity in wireless networks: Efficient protocols and out-age behavior,” IEEE Trans. Inform. Theory, vol. 50, no. 12, pp.3062–3080, 2004.
[4] R. Min, M. Bhardwaj, S.-H. Cho, et al., “Energy-centric en-abling technologies for wireless sensor networks,” IEEE Wire-less Communications, vol. 9, no. 4, pp. 28–39, 2002.
[5] G. Caire and D. Tuninetti, “The throughput of hybrid-ARQprotocols for the Gaussian collision channel,” IEEE Trans. In-form. Theory, vol. 47, no. 5, pp. 1971–1988, 2001.
[6] M. Zorzi and R. R. Rao, “Geographic random forwarding(GeRaF) for ad hoc and sensor networks: Multihop perfor-mance,” IEEE Transactions on Mobile Computing, vol. 2, no. 4,pp. 337–348, 2003.
[7] M. Zorzi and R. R. Rao, “Geographic random forwarding(GeRaF) for ad hoc and sensor networks: Energy and latencyperformance,” IEEE Transactions on Mobile Computing, vol. 2,no. 4, pp. 349–365, 2003.

624 EURASIP Journal on Wireless Communications and Networking
[8] B. Zhao, R. Iyer Seshadri, and M. C. Valenti, “Geographic ran-dom forwarding with hybrid-ARQ for ad hoc networks withrapid sleep cycles,” in Proc. IEEE Global TelecommunicationsConference (GLOBECOM ’04), vol. 5, pp. 3047–3052, Dallas,Tex, USA, November–December 2004.
[9] M. C. Valenti and B. Zhao, “Hybrid ARQ-based intra-clustergeographically-informed relaying,” in Proc. IEEE MilitaryCommunication Conference (MILCOM ’04), Monterey, Calif,USA, November 2004.
[10] S. Wicker, Error Control Systems for Digital Communicationsand Storage, Prentice-Hall, Englewood Cliffs, NJ, USA, 1995.
[11] T. S. Rappaport, Wireless Communications: Principles andPractice, Prentice-Hall PTR, Upper Saddle River, NJ, USA,2nd edition, 2002.
[12] D. L. Snyder and M. I. Miller, Random Point Processes in Timeand Space, Springer, New York, NY, USA, 1991.
Bin Zhao received the B.S.E.E. and M.S.E.E.degrees from Shanghai Jiaotong University,Shanghai, China, in 1995 and 1998, respec-tively. He received a Ph.D. degree in elec-trical engineering from West Virginia Uni-versity (Morgantown, WVa, USA) in 2004,where he worked as a Research Assistantin the Wireless Communications ResearchLaboratory. He is currently a communica-tions engineer in Efficient Channel CodingInc. (Brooklyn Heights, Ohio, USA). His research interests are inthe areas of communication theory, error-correction coding, sen-sor networks, and information theory. Prior to attending gradu-ate school at West Virginia University, he was a DSP engineer withHuawei Technologies Co. Ltd. where he was engaged in the devel-opment of real-time speech and channel codec for IS-95 system.
Matthew C. Valenti received a B.S.E.E. de-gree from Virginia Tech, Blacksburg (USA),in 1992, an M.S.E.E. degree from the JohnsHopkins University (Baltimore, Md, USA)in 1995, and a Ph.D. degree in electricalengineering from Virginia Tech, in 1999,where he was a Bradley Fellow. He is cur-rently an Assistant Professor in the Lane De-partment of Computer Science and Electri-cal Engineering at West Virginia University(Morgantown, WVa, USA). He serves as an Associate Editor forIEEE Transactions on Vehicular Technology, and has been on thetechnical program committee for several international conferences.His research interests are in the areas of communication theory,error-correction coding, applied information theory, and wirelessmultiple-access networks. He also acts as a consultant to severalcompanies engaged in various aspects of turbo codec design, in-cluding software radio, FPGA, and ASIC implementations for mil-itary, satellite, and third-generation cellular applications. Prior toattending graduate school at Virginia Tech, he was an electronicsengineer at the United States Naval Research Laboratory (Wash-ington, DC, USA) where he was engaged in the design and devel-opment of a space-bourne adaptive antenna array and a system forthe collection and correlation of maritime ELINT signals.

EURASIP Journal on Wireless Communications and Networking 2005:5, 625–634c© 2005 K. Murugan and S. Shanmugavel
Traffic-Dependent and Energy-Based Time DelayRouting Algorithms for Improving EnergyEfficiency in Mobile Ad Hoc Networks
K. MuruganRamanujan Computing Centre, College of Engineering, Chennai, IndiaEmail: [email protected]
S. ShanmugavelTelematics Lab, Department of ECE, College of Engineering, Chennai, IndiaEmail: [email protected]
Received 4 July 2004; Revised 26 May 2005
Reducing power consumption and increasing battery life of nodes in an ad hoc network requires an integrated power control androuting strategy. The power control is achieved by new route selection mechanisms for MANET routing protocols, which we callenergy-based time delay routing (EBTDR) and highest energy routing (HER). These algorithms try to increase the operationallifetime of an ad hoc network by implementing a couple of modifications to the basic DSR protocol and making it energy efficientin routing packets. The modification in EBTDR is enabled by introducing a delay in forwarding the packets by nodes, which isinversely proportional to the remaining energy level of the node, while in HER the route selection is based on the energy drainrate information in the route request packet to improve the fidelity in selection as it provides an optimized solution based on thelink traffic in the network. It is observed from the simulation results that the proposed algorithms increase the lifetime of mobilead hoc networks, at the expense of system complexity and realization.
Keywords and phrases: DSR, AODV, energy efficient routing protocols, ad hoc networks, GloMoSim, MANET.
1. INTRODUCTION
The mobile ad hoc networks (MANETs) [1] are instantly de-ployable without anywired base station or fixed infrastruc-ture. A node communicates directly with the nodes withinradio range and indirectly with all others using a dynami-cally determined multihop route. The major motivation forstudying ad hoc networks comes from military usage, sev-eral forms of tactical communication such as disaster re-coveries, law enforcements, and various forms of home andpersonal area networks as well as sensor networks. A criti-cal issue for MANETs is that the activity of nodes is energy-constrained. However, significant energy savings can be ob-tained at the routing level by designing minimum energyrouting protocols that take into consideration the energycosts of a route when choosing the appropriate route. adhoc routing protocols can be broadly classified as table-driven routing protocols and source-initiated on-demand
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
routing protocols [2]. Table-driven schemes are more expen-sive in terms of energy consumption as compared to the on-demand schemes because of the large routing overhead in-curred in the former [3]. Hence, the on-demand approachis preferable for designing minimum energy routing proto-cols.
Many protocols are designed concerning device en-ergy generation such as minimum total transmissionpower routing and min-max battery cost routing [4]. An-other method was to introduce power-aware cost met-rics for routes and design routing schemes that mini-mize these metrics [5]. Researchers have also suggestedMAC layer modifications, which power down the inac-tive nodes to obtain energy savings. The scheme sug-gested by Ramanathan and Rosales-Hain [6] brings aboutpower savings by using transmission power adjustmentto control the topology of a multihop wireless net-work. Rodoplu and Meng [7] developed a distributedposition-based network protocol that uses location infor-mation to compute the minimum power relay route to thedestination, which minimizes the energy consumed for rout-ing the packets.

626 EURASIP Journal on Wireless Communications and Networking
Conventional on-demand routing protocols such as adhoc on-demand distance vector (AODV) [8] and dynamicsource routing (DSR) [9] are not energy aware. Routing isdone based on the shortest path in which the cost met-ric either considers number of hops or end-to-end de-lay at the time when route is established. If nodes areenergy-constrained, route selection based on these metricsalone may have adverse effect on the network lifetime on thewhole. For example, a node that lies on several routes willdie prematurely and the network may get partitioned. Sincerecharging or replacing the battery is not feasible in most ofthe ad hoc network applications, it is imperative to study anddesign routing protocols which are able to conserve node en-ergy to prevent such premature death.
In this paper, work is focused on the design and imple-mentation of energy-based time delay routing (EBTDR) al-gorithm in the existing DSR protocol by introducing a delayin forwarding the packets by nodes, which is inversely pro-portional to the remaining energy level of the node. In ad-dition to our work, selection of routes based on the energyinformation on the route request packet was also exploredbased on the highest energy routing algorithm. A variationof the highest energy routing (HER) algorithm attempts todiscourage nodes with small lifetime from participating inthe route discovery. Thus the network partitions occur rarelyand reliability of packet transfer through the path increases.The path selected is energy efficient since it deters selectionof paths through nodes with higher loading, so as to avoidusing node’s power to transmit the packet. Quick depletionof energy along the paths occurs if the traffic demands arelong lasting and concentrated for routing protocols that arenot aware of energy consumption. The destination node de-cides on the route path based on the introduction of a newmetric called drain rate (DR). The drain rate is calculatedwith the remaining energy of a node (to predict the lifetimeof nodes) according to current traffic conditions. These algo-rithms are designed and implemented using global mobilesimulator (GloMoSim), a scalable simulation environmentfor network simulation. We evaluated the performance of allthe protocols under a wide range of conditions by varyingthe node mobility and network load.
The rest of this paper is organized as follows. We providea brief overview of the existing DSR protocol in Section 2.In Section 3, we explain energy-based time delay routing(EBTDR) and highest energy routing (HER) algorithms.Section 4 analyzes the simulation methods and environ-ments. Section 5 discusses the performance of our algo-rithms. Section 6 describes a review of the routing schemesrelated to this work. Finally, we present our conclusion inSection 7.
2. OVERVIEW OF THE EXISTINGPROTOCOL MECHANISM
In this section, we outline the existing version of on-demandrouting algorithm DSR. This will provide a reference for de-signing the minimum energy routing protocol and serve as abase for our performance comparisons.
2.1. Dynamic source routing
We use the dynamic source routing (DSR) protocol [8, 9] inthis paper to illustrate the effects of energy efficiency in on-demand routing protocols, since DSR operates entirely on-demand. DSR is composed of two mechanisms that worktogether to allow the discovery and maintenance of sourceroutes in the ad hoc network. This section describes the ba-sic operation of route discovery and route maintenance. Al-though a number of optimizations to this basic operationexist [8, 9], they are not discussed here due to space limi-tations. Route discovery is the mechanism by which a nodeS wishing to send a packet to a destination node D obtainsa source route to D. Route discovery is used only when Sattempts to send a packet to D and does not know a routeto D. To initiate a new route discovery to a node D (thetarget of the route discovery), S transmits a route request(RREQ) packet, which is received by other nodes locatedwithin direct wireless transmission range of S. Each nodethat receives the RREQ packet appends its own address toa record in the packet and rebroadcasts it to its neighbors,unless it has recently seen another copy of the RREQ forthis route discovery or it finds that its address was alreadylisted in the route record in the packet. The forwarding ofthe RREQ continues till the node S receives a route reply(RREP) packet from D, giving a copy of the accumulatedroute record from the RREQ. The RREP contains the paththat the RREQ traveled to reachD. The major objective of theroute maintenance procedure is to detect a broken link andfind a new route to destination. DSR is able to learn routesby overhearing packets, not addressed to it, using promis-cuous mode (DSR-PR). DSR-PR disables the “interface ad-dress filtering” and causes the network protocol to receive allpackets that the interface overhears to obtain useful sourceroutes.
3. ENERGY-EFFICIENT MANET ROUTINGALGORITHM
In the common thread of energy-aware routing protocols,routing decisions should be based on each node’s energylevel. The ultimate goal of our approach is to have a goodenergy balance among mobile nodes, which results in longservice time of the network. Considering the example inFigure 1, usage of the same shortest path would shorten thelifetime of the system and hence should be avoided (the re-maining energy levels are given adjacent to the nodes). Thus,the basic idea behind our energy-aware routing protocols isto utilize diverse routing paths instead of continuous use of asingle path.
In this section, we describe two new route selectionmechanisms for MANET routing protocols, namely, energy-based time delay routing (EBTDR) and highest energy rout-ing (HER). In these algorithms, selection of routes should bebased on the remaining battery level of the node. We havecompared the performance of EBTDR and HER-based rout-ing protocols with existing on-demand routing protocol suchas DSR.

Traffic-Dependent and EBTDR Algorithms for MANETs 627
7 9 8
A B C
S T5 3
D E
Figure 1: Example network.
3.1. Energy-based time delay routing algorithm
The energy-based time delay routing algorithm is based onthe DSR protocol. The route discovery in the DSR protocol ismodified so as to select the most energy-efficient route by thesource node. The route maintenance is essentially the same asin DSR. Generally in an on-demand routing algorithm, whena source needs to know the route to a destination, it broad-casts an RREQ packet. The neighboring nodes on receivingthe first-arrived RREQ packet relay this packet immediatelyto their neighbors. But in the EBTDR algorithm, the “packetforwarding” does not occur immediately. In the EBTDR al-gorithm, each node on receiving a request packet holds thepacket for a period of time, which is inversely proportional toits current energy level [10]. After this delay period, the nodeforwards the request packet. This simple delay mechanism ismotivated by the fact that the destination node accepts onlythe first request packet and discards other duplicate requests.With our delay mechanism [11], request packets from nodeswith lower energy levels are transmitted after a larger delaywhereas the request packets from nodes with higher energylevels are transmitted with a smaller delay. This route discov-ery procedure continues until the destination node receivesthe first request packet whose recorded routes may consti-tute nodes with high energy levels. A node holds the RREQpacket for a small duration that is inversely proportional toits own residual battery capacity.
Some nodes may receive several copies of the same RREQpacket from other neighbors. In EBTDR, the duplicate copiesof the same RREQ packets would be dropped. In Figure 2, as-sume that the initial maximum battery capacity of all nodes is10. The remaining energy levels after a finite amount of timeare shown in Figure 2 alongside the nodes. Owing to trans-mission range limitations, nodes A and B can transmit thepacket only to nodes C and D, respectively. The residual bat-tery capacities of A and B nodes are the same, and thereforethey flood the RREQ packets at the same time. The traveltime between nodes may be ignored without loss of gener-ality. Since node D has more residual battery capacity thannode C, other neighbors that can communicate with nodesC and D receive the RREQ packet from node C (becauseof the inverse delay). The process repeats until the RREQpacket arrives at the destination. In this figure, the destina-tion node receives packets on many routes out of which thethree routes, namely, (S-B-C-E-T), (S-A-D-F-T), and (S-
9T2
7T5
9
B C ET1
T6S
T1
A T2 D T4
6
G T7 T
9 8
9
T4 T5
B
9
F
RREQ packetDuplicate packetRREP packet
Node number
Remaining energy capacity
Figure 2: Example network with energy level.
A-D-G-T), are considered for explaining route procedure.Normally the route with the least hop is selected. But withEBTDR, the route for communication from node S to nodeT is chosen as (S-A-D-F-T) since nodes with lesser energylevel delay the packet more than the others. The intuitionbehind this protocol is to enable those request packets thattraverse nodes with high energy levels to arrive at the desti-nation early. Note that the implementation of the proposedalgorithm requires minimal modification at local nodes byadding a delay mechanism [11]. However, the penalty of thisprotocol is introduction of delay in route discovery proce-dure. The destination sends a route reply (RRPL) packet backto this route and data packet transmission starts when thesource receives the RRPL packet from the destination. Theselected route (S-A-D-F-T) may not always guarantee thetotal minimum energy partially because it does not considerthe number of hops in the route. Nevertheless, simulation re-sults showed that EBTDR prolongs the network lifetime sig-nificantly.
3.1.1. Delay mechanism
In the algorithm mentioned above, we had stated that thedelay incorporated by each of the nodes is inversely propor-tional to the remaining energy level of each of the corre-sponding nodes. The delay is calculated as.
d = D − D∗eE
, (1)
where d is a delay to be introduced, D is a maximum delaypossible, e is a remaining energy of a node, and E is a maxi-mal energy possible for a node.
3.2. Highest energy routing algorithm
In this algorithm, the selection of routes should be basedon the remaining energy levels of the nodes that constitutethe route. Modifications in DSR have been proposed in such

628 EURASIP Journal on Wireless Communications and Networking
a way that the destination node knows about the energy lev-els of the intermediate nodes and hence can choose the mostenergy-efficient route. HER differs from the conventionalDSR in the route discovery only. The other aspects of DSRremain essentially the same.
In the conventional DSR protocol the RREQ packet hasno energy information in it. But in this algorithm an energyfield is included in the RREQ packet where the intermediatenodes insert their current energy level while forwarding theRREQ packet. The information on the remaining energy lev-els of intermediate nodes reaches the destination node. Thusthis algorithm makes known the energy information on allthe routes available to the destination node. The destinationnode chooses an energy-efficient route from a set of possi-ble routes. In the conventional DSR protocol, the destina-tion node starts to transmit the RREP packet as soon as thefirst RREQ packet arrives. This ensures that the data packetstake the shortest path to reach the destination. But it is wellknown that the shortest path need not always be an energy ef-ficient path. Hence it is necessary for the destination node towait for the other RREQ packets that have travelled a longer(and perhaps a more energy-efficient) route as compared tothat travelled by the first RREQ packet.
In HER, the destination node is designed in such a waythat it has to wait for a short duration of time (which is di-rectly proportional to the remaining energy level of the node)during which the destination node caches the routes that arebeing reported to it by different RREQ packets. For this pur-pose the destination node builds a cache during route dis-covery that is very similar to the route cache called route-request cache. The destination node then sends this route re-ply packet to the source by selecting the maximum of theminimum energy in the paths acquired from the RREQ pack-ets. The selection of the route to reply by the destinationdepends on the energy level of the participating nodes dur-ing route discovery. This selection of the best route is basedon the following algorithm: the destination node first deter-mines the least power level in each route that is reported toit by the RREQ packets. Next it compares these least powerlevels and chooses the highest among them and then selectsthe corresponding route. Thus, by this algorithm, the desti-nation node selects the route with the highest lifetime froma set of available routes. Since the least energy level is maxi-mum, the selected route has the highest lifetime among theavailable routes.
3.2.1. Addition of drain rate in the costfunction of HER algorithm
When the remaining power is the only metric used to estab-lish the best route between the source and the destination, wecannot guarantee that a node on the route, even with a highvalue of remaining battery power, will survive if used to routea heavy traffic. If a node is willing to accept all route requestsonly because it currently has enough residual battery capac-ity, much traffic load will be injected through that node. Inthis sense, the actual drain rates of power consumption of thenode will tend to be high, resulting in a sharp reduction ofbattery power. As a consequence, it could exhaust the node’s
power supply fast causing the node to die soon. To mitigatethis problem, traffic load information, besides residual bat-tery power, could be employed. To this end, techniques toaccurately measure traffic load at nodes should be devised[12].
As a further enhancement to the highest energy routingthat has been proposed in the previous section, we now mod-ify the cost function that was used in the HER algorithm. Inthe HER algorithm, we used the remaining energy level of ev-ery node in the path as the cost metric. As an improvementin HER, we also consider the energy drain rate in each node.The introduction of a new metric, the drain rate (DR), isused with the remaining energy of a node to predict the life-time of nodes, according to current traffic conditions. Energydrain rate measured in mWh can be defined as the amount ofenergy consumed in unit time. The inclusion of energy drainrate in the cost metric improves the fidelity of the HER algo-rithm, as it provides a more optimized solution by consider-ing the link traffic in an active network. In HER algorithm,each node, instead of adding the remaining energy level, addsa cost metric to the route request packet that it forwards. Thecost metric depends on both the remaining energy level inthe node and its current energy drain rate. Every node cal-culates its drain rate every six seconds. The method used byeach node to calculate the drain rate is similar to runningaverage. Let DRold be the drain rate calculated up to the pre-vious six-second interval and let DRnew be the drain rate cal-culated in the current six-second interval. The actual drainrate DR is calculated as
DR = β ×DRold + (1− β)×DRnew. (2)
In the function given in (2), the factor β (< 1) determineshow fast the history of information (DRold) is forgotten andDRnew converges to a factor determined by (1−β). This drainrate that has been calculated in this manner is used to calcu-late the cost function along with the remaining energy levelas given in (3):
Cost function (σ)
= current remaining energy level/drain rate (DR).(3)
This cost function of each node is then added to the route re-quest packet that is being forwarded through that node. Thecost function is an inverse measure of how much network re-source is to be spent if the data transmission is to be carriedout through that node. The destination node now selects thepath in which the least cost function is highest among a setof routes through RREQ packet received by the destination.
The route request packet consists of an IP header. TheHER route request header is followed by the list of addressesof the intermediate nodes that have forwarded the route re-quest. The HER header consists of the remaining power levelsof the corresponding nodes that constitute the route. All theremaining packets formats are the same as in DSR protocol.

Traffic-Dependent and EBTDR Algorithms for MANETs 629
4. PERFORMANCE EVALUATION
The routing protocols are simulated within the GloMoSimlibrary [13]. The GloMoSim library is a scalable simulationenvironment for wireless network systems using the par-allel discrete-event simulation capability provided by PAR-SEC [14]. We simulated a network of mobile nodes placedrandomly within a 1000× 1000 square meter. Each node hasbeen chosen to have a radio propagation range of 250 metersand a channel capacity of 2 Mb/s. We used the IEEE 802.11distributed coordination function (DCF) as the medium ac-cess control (MAC) protocol. Each simulation was executedfor 900 seconds. Multiple runs with different seeds valueswere simulated for each scenario and the collected data wasaveraged over those runs. A traffic generator was devel-oped to simulate CBR sources. The size of data payload is512 bytes. Data sessions with randomly selected sources anddestinations were simulated. We varied the traffic load bychanging the number of data sessions and examined its ef-fect on routing protocols.
4.1. Energy consumption model
As for the energy consumption model used in this work, weassume that every mobile node is equipped with an IEEEnetwork interface card (NIC) with 2 Mbps. According to thespecification of the NIC, the energy consumption varies from240 mA in receiving mode to 280 mA in transmitting mode,using a 5.0 V energy supply. Thus, when calculating the en-ergy consumed to transmit a packet p, E(p) = i∗v∗tp joulesare needed, where i is the current, v is the voltage, and tpsis the time taken to transmit the packet p. Besides, the en-ergy consumption values are determined based on [15]. Inthe simulations, the voltage v is chosen as 5 V and we assumethat the packet transmission time tp is dependant on trans-mitter for transmitting the packets. We thus calculated theenergy required to transmit and receive a packet p by usingEtx(p) = 280 mA∗v∗tp and Erx(p) = 240 mA∗v∗tp [15], re-spectively. In our simulation, all nodes have their initial en-ergy values, which are randomly selected, but with minimaldeviations. Every node has an initial energy level at the begin-ning of a simulation. For every transmission and reception ofpackets, the energy level is decremented by a specified value,which represents the energy usage for transmitting and re-ceiving. When the energy level goes down beyond the thresh-old level, no more packets can be received or transmitted bythe host.
4.2. Performance metrics
(i) Throughput is measured as the ratio of the number of datapackets delivered to the destination and the number of datapackets sent by the sender.
(ii) End-to-end delay is the time between the reception ofthe last and first packet/total number of packets reaching theapplication layer.
(iii) Control overhead is measured as the total number ofcontrol packets transmitted during the simulation period.
(iv) Energy variance of the nodes is defined as the vari-ance of the remaining energy levels of the entire network. It
25 50 75 100 125 150 175 2000
200
400
600
800
1000
1200
1400
1600
1800
AODVDSRDSR-PR
EBTDRHER
Con
trol
over
hea
d
No. of nodes
Figure 3: Control overhead versus number of nodes.
is inversely proportional to the uniform energy distributionin a network.
(v) Average energy left is taken as the average of the re-maining energy levels of all the nodes in the network.
5. SIMULATION RESULTS AND ANALYSIS
In this section, the performance results of various algorithmswith respect to mobility, control overhead, throughput, end-to-end delay, energy variance, and average energy left are pre-sented. On the whole the proposed algorithms improve theenergy efficiency of the mobile ad hoc networks, which is themain objective of this paper. Given below are the effects ofour algorithm on the various parameters. From the results, itcan be inferred that the EBTDR is well suited for high-delayand high-density networks. HER is best suited for ad hoc net-works under normal conditions of network density and load.Also under high traffic density, HER is better compared toDSR and EBTDR since it considers both drain rate and theremaining energy level of the nodes.
5.1. Routing protocol overhead
Routing protocol overhead is an important metric for com-paring these protocols as it measures the scalability of a pro-tocol in congested or low-bandwidth environments and itsefficiency in terms of consuming node battery power. Proto-cols that send large number of routing packets can also in-crease the probability of packets collision and may delay datapackets in network interface transmission queues. Figure 3shows the control overhead with varying number of nodes.It indicates that the control overhead increases as the num-ber of nodes increases due to increase in number of routerequests and number of route replies flooded in the net-work. Among all, HER algorithm generates lesser overheadcompared to DSR and EBTDR. HER receives the route re-quests for a specific amount of time before sending backa single route reply. From Figure 4, it is evident that the

630 EURASIP Journal on Wireless Communications and Networking
1 2 3 4 5 6 7 8 9 10400
500
600
700
800
900
1000
1100
1200
1300
1400
AODVDSR-PREBTDR
DSRHER
Con
trol
over
hea
d
Speed (m/s)
Figure 4: Control overhead versus speed (m/s).
5 10 15 20 25 30500
1500
2500
3500
4500
5500
6500
7500
8500
9500
DSR-PRHEREBTDR
DSRAODV
Con
trol
over
hea
d
No. of source-destination pairs
Figure 5: Control overhead versus number of source-destinationpairs.
control overhead is lesser for EBTDR and HER algorithmswhen compared with AODV, DSR-PR, and DSR as functionof mobility. In general, at the highest mobility, more controlpackets are needed to acquire routes, thereby increasing theoverheads. Figure 4 shows that the HER receives the routerequests over a period of time and gives a single route replywhile DSR gives replies for all the route requests and this isthe reason why HER has lesser control overhead. DSR usesgreater number of control packets since it floods the RREQpacket for every source-destination pairs, which is shown inFigure 5. From the graph, it is evident that the overhead in-creases with increase in number of source-destination pairsfor DSR but decreases for HER and EBTDR. DSR-PR has lesscontrol overhead as there is promiscuous hearing.
100 200 300 400 500 600 700 800 9000.998
0.9985
0.999
0.9995
1
1.0005
AODVDSR-PREBTDR
DSRHER
Th
rou
ghpu
t
Pause time
Figure 6: Throughput versus pause time.
5.2. Throughput
It can be inferred from Figure 6 that the throughput ofEBTDR and HER is better than that of AODV and DSR-PR with respect to varying pause times, but the margin ofvariation is minimal. The graph also shows unity through-put for the proposed algorithms when compared to DSR andDSR-PR. This slight increase, though difficult, is attained dueto lower network partitions and lower network overheadsin our algorithms. Nodes in the simulation move accord-ing to a model that we call the random way point model.The movement scenario files used for each simulation arecharacterized by a pause time. Each node begins the simula-tion by remaining stationary for pause time seconds. Uponreaching the destination, the node pauses again for pausetime seconds, selects another destination, and proceeds. Oursimulation run with movement pattern generated for differ-ent pause times. The throughput of all protocols for ran-dom waypoint mobility with uniformly distributed speed isshown in Figure 7. In order to explore how the protocolsscale as the rate of topology change varies, we changed themaximum node speed from 1 m/s to 10 m/s. This shows thatall protocols deliver more than 99% of the packets at differ-ent speeds. The performance of EBTDR and HER are com-parable to that of DSR, that is, there are no degradations inthe performance of DSR by the introduction of our proposedchanges in the original DSR algorithm.
5.3. End-to-end delay
The average end-to-end delay performance of all the pro-tocols is shown in Figure 8. From the graph, it is evidentthat the packet delay remains constant with varying mobilityfor all protocols. The speed is varied from 1 m/s to 10 m/s.The end-to-end delay of EBTDR and HER are comparable

Traffic-Dependent and EBTDR Algorithms for MANETs 631
1 2 3 4 5 6 7 8 9 100.96
0.965
0.97
0.975
0.98
0.985
0.99
0.995
1
1.005
AODVDSR-PREBTDR
DSRHER
Th
rou
ghpu
t
Speed (m/s)
Figure 7: Throughput versus speed (m/s).
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
AODVDSRDSR-PR
EBTDRHER
En
d-to
-en
dde
lay
Speed (m/s)
Figure 8: End-to-end delay versus speed (m/s).
to the original DSR algorithm. This is on expected lines as inEBTDR. We have specifically added delay in forwarding routerequest packets. In HER we wait for a specific amount of timebefore replying to the route request packets. Nevertheless,the advantage gained by our modifications overweighs theseshortcomings. The end-to-end delay remains constant withvarying pause times for all protocols as shown in Figure 9.
5.4. Energy variance
Energy variance is a factor used to identify the distribution ofenergy in the network. Figure 10 shows that there is marginalincrease in the energy variance with increase in the num-ber of source-destination pairs. The energy variance of HERprotocol is lesser than that of DSR-PR and AODV. Figure 11
100 200 300 400 500 600 700 800 9000.02
0.025
0.03
0.035
0.04
0.045
0.05
0.055
0.06
AODVDSRDSR-PR
EBTDRHER
En
d-to
-en
dde
lay
Pause time
Figure 9: End-to-end delay versus pause time (m/s).
5 10 15 20 25 300
200000
400000
600000
800000
1000000
1200000
HERDSR-PREBTDR
DSRAODV
En
ergy
vari
ance
No. of source-destination pairs
Figure 10: Energy variance versus number of source-destinationpairs.
presents the energy variance with respect to mobility. Theenergy variance of EBTDR and HER are lesser than that ofDSR. We vary the number of nodes from 25 to 200 with re-spect to energy variance as shown in Figure 12. All the abovesimulation results show that there is a uniform drain of en-ergy in the entire network. Hence, probability of a particu-lar link alone being drained completely is less, which leadsto the minimization of link failure. Thus, the lifetime of thenetwork is increased and the algorithms improve the energyefficiency of ad hoc networks.
5.5. Average energy left
Figure 13 presents the average energy left for all proto-cols with respect to varying source-destination pairs. Our

632 EURASIP Journal on Wireless Communications and Networking
1 2 3 4 5 6 7 8 9 1040000
50000
60000
70000
80000
90000
100000
110000
HERAODVDSR
DSR-PREBTDR
En
ergy
vari
ance
Speed (m/s)
Figure 11: Energy variance versus speed (m/s).
25 50 75 100 125 150 175 2000
50000
100000
150000
200000
250000
HERDSR-PREBTDR
DSRAODV
En
ergy
vari
ance
No. of nodes
Figure 12: Energy variance versus number of nodes.
protocols, EBTDR and HER, increase the lifetime of thenetwork as the network load increases. Figure 14 shows theaverage energy left with respect to mobility for all the proto-cols. It shows that the average energy left for our algorithms(EBTDR and HER) is higher than that of DSR, AODV, andDSR-PR. HER increases the network lifetime and is also bet-ter than all the other protocols for change in number of nodesas shown in Figure 15. From all the above-mentioned resultsit can be concluded that HER approach can properly extendthe lifetime of nodes and connections by evenly distribut-ing the energy expenditure among nodes. It avoids the overdissipation of packets through specific nodes by taking intoaccount the current traffic profiles and drain rate of the par-ticipating nodes.
5 10 15 20 25 302000
2500
3000
3500
4000
4500
HERDSR-PREBTDR
DSRAODV
Ave
rage
ener
gyle
ft(m
Wh
r)
No. of source destination pairs
Figure 13: Average energy left (mWh) versus number of source-destination pairs.
1 2 3 4 5 6 7 8 9 103750
3770
3790
3810
3830
3850
3870
3890
3910
EBTDRHERAODV
DSRDSR-PR
Ave
rage
ener
gyle
ft(m
Wh
r)
Speed (m/s)
Figure 14: Average energy left (mWh) versus speed (m/s).
6. RELATED WORK
In this section, we present a brief description of the relevantenergy-aware routing algorithms proposed recently. The en-ergy efficiency problem in wireless network design has gainedsignificant attention in the past few years. Some works on theconfiguration of a network topology with good connectivityuse minimal power consumption [6, 7], such as minimizingthe maximum power of nodes or minimizing the total powerconsumption of all nodes. Singh and Raghavendra [16] pro-posed the PAMAS protocol, a new channel access protocolfor ad hoc networks. PAMAS uses two different channels,separate data and signaling channels. The signaling channeltells the nodes when to power off their RF devices if a packet

Traffic-Dependent and EBTDR Algorithms for MANETs 633
25 50 75 100 125 150 175 2003500360037003800390040004100
HERDSR-PREBTDR
DSRAODV
Ave
rage
ener
gyle
ft(m
Wh
r)
No. of nodes
Figure 15: Average energy left (mWh) versus number of nodes.
is not being transmitted nor received. Feeney and Nilssonpresented in [15] a combination of simulation and experi-mental results showing that energy and bandwidth are sub-stantively different metrics and that resource utilization inrouting protocols is not fully addressed by bandwidth-centricanalysis. Chang and Tassiulas [17] also proposed maximizingthe life-time of a network when the message rate is known.Their main idea, namely, to avoid using low-power nodesand choose an efficient path at the beginning, has inspiredthe approach in this paper. In this work, we are interested inpower-aware route selection mechanisms for MANET rout-ing protocols.
The MTPR (minimum total transmission power routing)[4, 18] was initially developed to minimize the total “trans-mission power” consumption of nodes participating in theacquired route. According to Toh [4], the transmission powerrequired is proportional to dα where d is the distance be-tween two nodes and α between 2 and 4. This means that theMTPR prefers routes with more hops having short transmis-sion ranges to those with fewer hops but having long trans-mission ranges, with the understanding that more nodes in-volved in forwarding packets can increase the end-to-end de-lay. In addition, since the MTPR does not consider the re-maining power of nodes, it fails to prolong the lifetime ofeach node.
Furthermore, schemes trying to reduce only total trans-mission power do not reflect the nodes’ remaining power.Proposals, like the min-max battery cost routing (MMBCR)[5], consider the remaining power of nodes as the metricsfor acquiring routes in order to prolong the lifetime of eachnode. Finally, Toh [4] presented the conditional max-minbattery capacity routing (CMMBCR) protocol, which is ahybrid protocol that tries to arbitrate between the MTPRand MMBCR. Our approach is different from these previousworks. The problems that are dealt with in this paper are toavoid: the use of nodes with weak battery supply by the useof the proposed novel routing mechanism, which selects theenergy efficient route for payload transmission.
7. CONCLUSION
Various methods are proposed to improve the energy effi-ciency of mobile ad hoc networks in this paper by realiz-
ing variations from the DSR protocol. Power managementin each individual node participating in the network is desir-able to increase the network lifetime. Overall lifetime of thenetworks has increased for the proposed algorithms by con-sidering the energy module in routing of packets. Thoughthe algorithms HER and EBTDR involve system complexityin implementation, the advantages gained are multifold inview of energy and quality of service. The credibility of thealgorithms can be judged under environments with variantsin mobility and density for nodes having alarmingly low en-ergy levels. Constraints placed on the selection of route bythe proposed algorithms tend to decrease the congestion inthe channel, thereby enabling maximal availability of channelto nodes. Thus the delay imposed while forwarding packetsby MAC layer is decreased to reduce the overlay peer-to-peerdelay in HER and EBTDR. These algorithms have more man-ifold merits in various network profiles than the basic DSRprotocol.
REFERENCES
[1] C. E. Perkins, Ad Hoc Networking, Addison-Wesley, Boston,Mass, USA, 2001.
[2] E. M. Royer and C.-K. Toh, “A review of current routing pro-tocols for Ad Hoc mobile wireless networks,” IEEE Pers. Com-mun., vol. 6, no. 2, pp. 46–55, 1999.
[3] T. X. Brown, S. Doshi, and Q. Zhang, “Optimal power awarerouting in a wireless Ad Hoc network,” in Proc. 11th IEEEWorkshop on Local and Metropolitan Area Networks (LAN-MAN ’01), pp. 102–105, Boulder, Colo, USA, March 2001.
[4] C.-K. Toh, “Maximum battery life routing to support ubiqui-tous mobile computing in wireless Ad Hoc networks,” IEEECommun. Mag., vol. 39, no. 6, pp. 138–147, 2001.
[5] S. Singh, M. Woo, and C. S. Raghavendra, “Power-awarerouting in mobile Ad Hoc networks,” in Proc. 4th AnnualACM/IEEE International Conference on Mobile Computing andNetworking (MOBICOM ’98), pp. 181–190, Dallas, Tex, USA,October 1998.
[6] R. Ramanathan and R. Rosales-Hain, “Topology control ofmultihop wireless networks using transmit power adjust-ment,” in Proc. 19th Annual Joint Conference of the IEEE Com-puter and Communications Societies (INFOCOM ’00), vol. 2,pp. 404–413, Tel Aviv, Israel, March 2000.
[7] V. Rodoplu and T. H. Meng, “Minimum energy mobile wire-less networks,” IEEE J. Select. Areas Commun., vol. 17, no. 8,pp. 1333–1344, 1999.
[8] S. R. Das, C. E. Perkins, and E. M. Royer, “Performance com-parison of two on-demand routing protocols for Ad Hoc net-works ,” in Proc. 19th Annual Joint Conference of the IEEEComputer and Communications Societies (INFOCOM ’00),vol. 1, pp. 3–12, Tel Aviv, Israel, March 2000.
[9] J. Broch, D. B. Johnson, and D. A. Maltz, “The Dy-namic Source Routing Protocol for Mobile Ad Hoc Net-works,” Internet-Draft, draft-ietf-manet-dsr-03.txt, October1999. Work in progress.
[10] K. Murugan, S. Shanmugavel, S. Saravanan, C. S. Saravanan,and J. Venkatakrishnan, “Delay and energy metric based rout-ing algorithms for improving efficiency in mobile Ad Hocnetworks,” in Proc. 3rd Asian International Mobile ComputingConference (AMOC ’04), Bangkok, Thailand, May 2004.
[11] W. Yu and J. Lee, “DSR-based energy-aware routing proto-cols in Ad Hoc networks,” in Proc. International Conferenceon Wireless Networks (ICWN ’02), Las Vegas, Nev, USA, June2002.

634 EURASIP Journal on Wireless Communications and Networking
[12] D. Kim, J. J. Garcia-Luna-Aceves, K. Obraczka, J.-C. Cano,and P. Manzoni, “Routing mechanisms for mobile Ad Hocnetworks based on the energy drain rate,” IEEE Transactionson Mobile Computing, vol. 2, no. 2, pp. 161–173, 2003.
[13] Glomosim User Manual, http://pcl.cs.ucla.edu/projects/glomosim.
[14] R. A. Meyer and R. Bagrodia, “PARSEC User Manual Release1.1,” January 1999, http://pcl.cs.ucla.edu/.
[15] L. M. Feeney and M. Nilsson, “Investigating the energy con-sumption of a wireless network interface in an Ad Hoc net-working environment,” in Proc. IEEE 20th Annual Joint Con-ference of the IEEE Computer and Communications Societies(INFOCOM ’01), vol. 3, pp. 1548–1557, Anchorage, Alaska,USA, April 2001.
[16] S. Singh and C. S. Raghavendra, “PAMAS: power aware multi-access protocol with signaling for Ad Hoc networks,” ACMComputer Communication Review, vol. 28, no. 3, pp. 5–26,1998.
[17] J.-H. Chang and L. Tassiulas, “Energy conserving routing inwireless ad-hoc networks,” in Proc. IEEE 19th Annual JointConference of the IEEE Computer and Communications Soci-eties (INFOCOM ’00), vol. 1, pp. 22–31, Tel Aviv, Israel, March2000.
[18] K. Scott and N. Bambos, “Routing and channel assignmentfor low power transmission in PCS,” in Proc. 5th IEEE In-ternational Conference on Universal Personal Communications(ICUPC ’96), vol. 2, pp. 498–502, Cambridge, Mass, USA,September–October 1996.
K. Murugan received his B.E. (electron-ics and communication engineering) de-gree in 1986 from Government College ofEngineering, Tirunelveli, and M.E. (com-puter science) degree in 1992 from RegionalCollege of Engineering, Tiruchirappalli. Hecurrently works as a Selection Grade Lec-turer in Ramanujan Computing Centre,Anna University, Chennai. His current areasof research interests are routing algorithm,ad hoc networks, and mobile computing.
S. Shanmugavel received his B.S. (math-ematics) degree from Devanga Arts Col-lege, Aruppukottai, Madurai University, in1975, and graduated from Madras Insti-tute of Technology with a major in elec-tronics and communication engineering in1978. He obtained his Ph.D. degree in thearea of coded communication and spread-spectrum techniques from India Institute ofTechnology, Kharagpur, India. At present heis working as Professor at the Department of Electronics and Com-munication Engineering, Anna University, Chennai. He has pub-lished more than 70 research papers in national and internationalconferences and journals in the area of mobile ad hoc networks,ATM networks, spread-spectrum communication, and error con-trol coding. His current areas of research interest are mobile adhoc networks, cellular IP networks, broadband ATM networks, andCDMA engineering and digital communication. He received IETE-CDIL Award in September 2000 for the Best Paper published inIETE Journal of Research.

EURASIP Journal on Wireless Communications and Networking 2005:5, 635–644c© 2005 Raminder P. Mann et al.
Energy-Aware Routing Protocol forAd Hoc Wireless Sensor Networks
Raminder P. MannDepartment of Electrical and Computer Engineering, Wichita State University, Wichita, KS 67260, USAEmail: [email protected]
Kamesh R. NamuduriDepartment of Electrical and Computer Engineering, Wichita State University, Wichita, KS 67260, USAEmail: [email protected]
Ravi PendseDepartment of Electrical and Computer Engineering, Wichita State University, Wichita, KS 67260, USAEmail: [email protected]
Received 15 June 2004; Revised 15 April 2005
Wireless ad hoc sensor networks differ from wireless ad hoc networks from the following perspectives: low energy, lightweightrouting protocols, and adaptive communication patterns. This paper proposes an energy-aware routing protocol (EARP) suitablefor ad hoc wireless sensor networks and presents an analysis for its energy consumption in various phases of route discovery andmaintenance. Based on the energy consumption associated with route request processing, EARP advocates the minimization ofroute requests by allocating dynamic route expiry times. This paper introduces a unique mechanism for estimation of route expirytime based on the probability of route validity, which is a function of time, number of hops, and mobility parameters. In contrastto AODV, EARP reduces the repeated flooding of route requests by maintaining valid routes for longer durations.
Keywords and phrases: ad hoc networks, routing protocols, mobility models.
1. INTRODUCTION
Wireless sensors are small devices with limited energy with-out energy backup; they are more of one-time-use sensors.Therefore, an energy-efficient routing mechanism wouldmean longer sensor lifetime and higher network efficiency.Active research is going on in the field of routing in adhoc sensor networks. A lot of development has been seenin ad hoc routing since the introduction of highly dynamicdestination-sequenced distance-vector routing (DSDV) [1].Ad hoc on-demand distance-vector routing (AODV) [2] anddynamic source routing (DSR) [3] have been very popu-lar and widely accepted ad hoc routing protocols. Variationsof DSR and AODV have been suggested in the literature;one such approach can be found in [4]. An enhancementto AODV is also presented in self-learning ad hoc routingprotocol (SARP) [5] which adds the route caching capabil-
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
ity of DSR to AODV to achieve higher efficiency. This pa-per presents an energy-aware routing protocol (EARP) basedon AODV. In particular, this paper addresses the problem offrequent route expiry and suggests a criterion to statisticallyestimate the route validity time. This criterion results in thereduction of route requests and consequently improves en-ergy efficiency.
1.1. Node communication pattern
A typical sensor network consists of two types of nodescalled sensor nodes (referred to as sensors) and data gath-ering nodes (referred to as nodes). Sensors are small wire-less devices that are capable of sensing the environment andtransmitting the data they collect. They have unidirectionalwireless links and can only receive control signals from datagathering nodes. They have two modes of operation: energysaving mode and active mode. Data gathering nodes are rela-tively more powerful wireless nodes as compared to sensors.They have larger energy backup and possess data computa-tion, aggregation, and processing abilities. They are respon-sible for collecting data from all the sensors in their vicinity

636 EURASIP Journal on Wireless Communications and Networking
N1
N2
N3
N4
N5
N6
N7
N8
N9 r
R
Figure 1: Communication pattern of nodes in an ad hoc network:smaller circles denote the sensing range and bigger circles denotethe communication range.
then aggregate and process the data before transmitting toother nodes. The links between these nodes are bidirectional;hence they have the capability to transmit and receive data.Data gathering nodes play the crucial role of removing over-lapping data collected from sensors and transmitting onlythe useful and required data to various other nodes in thenetwork. The entire routing functionality is built only in thedata gathering nodes. This mechanism is quite similar to thecluster head approach discussed in [6, 7], the major differ-ence being in the classification of nodes based on their func-tionality. In most of the cluster-head-based protocols, thecluster head is chosen based on the various parameters likeenergy backup. In this node communication pattern, the en-ergy consumption in election process is avoided by separat-ing the two types of nodes based on their hardware.
In Figure 1, each smaller circle denotes the vicinity ofeach data gathering node, that is, the region in which allthe sensors are controlled by one particular node. The ra-dius of this circle is called the sensing radius and is denotedby “r.” The bigger circle is the communication radius “R” ofthat particular node and it can directly communicate withall the nodes in this range, form neighbors, and exchangedata.
Node to sensor communication is controlled by the node;it can turn on the transmitters of all the sensors in its vicinityby sending the required control signals. On receiving thesecontrol signals, the sensors switch from energy saving modeto active mode and transmit the collected data to the cor-responding node. The transmitters of sensors would revertto energy saving mode after sending data to the node. Thecomputation is reduced at the sensors by enforcing the sleepmechanism [8] on all the sensors.
Node-to-node communication is very similar to themethod described in [9]. Every node looks for all other nodeswilling to exchange data in its communication range. Afterexchanging the start-up messages and verifying the signal-to-noise (SNR) levels, nodes establish neighbors and allocateone time division multiple access (TDMA) [10] slot within aframe to each neighbor.
t
tc
Figure 2: Channel allocation in an ad hoc wireless network: t de-notes the frame length and tc denotes the time slot assigned to eachneighboring node.
As shown in Figure 2, if the entire TDMA frame is of tseconds and the slot allocated to each neighbor is tc, then thenumber of neighbors a node can have is t/tc. The ratio t/tcwill be later used to explain the energy savings in EARP.
1.2. Energy estimation
The energy consumption estimates given in [11] are used inthis paper to calculate the total energy consumption in theroute discovery procedure using route request (RREQ) androute reply (RREP) [2]. The energy required to transmit r0
bits is given by
Pt(s1, s2
) = [α1 + α2d(s1, s2
)n]r0, (1)
where d(s1, s2) denotes the distance between nodes s1 and s2
in meters, and α1 and α2 are communication constants. Thevalue of n depends on signal propagation. The above equa-tion can be rewritten by replacing r0 with B∗t, where B is thetotal link capacity between one-hop neighbors in kbps and tis the total frame size in seconds:
P1 =[α1 + α2d
4]∗ B ∗ t. (2)
In the above expression, d represents the average distance be-tween two neighbors in the network. The path loss exponentn [12] depends on the environment and the approximatevalue of n in a shadowed urban area lying between 3 to 5.Therefore, for all the computations in this paper, the value ofn is taken as 4. Thus, P1 gives the energy consumed in trans-mitting one frame from a node to its neighbors. Similarly, theestimate for the energy consumed in receiving ri(= tc ∗ B)bits of data given in [11] is rewritten as follows:
P2 = αr ∗ tc ∗ B. (3)
In this expression, αr is the communication constant withtypical value of 135 nJ/b [11] and tc is the duration of sin-gle time slot allocated to each neighbor in seconds. Thus, P2
gives the total energy spent by one neighbor in receiving itsshare out of the total frame transmitted by the source.

Energy-Aware Routing Protocol 637
1.3. Link availability
Link availability addresses the problem of prediction of thestatus of a link between two nodes after time t based onnetwork parameters. The probability of link availability dis-cussed in [13] is used with some modifications as a base foroperation of EARP. In [13], the authors proposed a randomad hoc mobility model and computed the probability of linkavailability (Am,n(t)) between nodes m and n after time t as
Am,n(t) ≈ 1−Φ(
12
, 2,−4R2
eq
αm,n
), (4)
αm,n = 2t(σ2m + µ2
m
λm+σ2n + µ2
n
λn
), (5)
where Φ(a, b, z) is the Kummer-confluent hypergeometricfunction,1 Req is the effective communication radius, t is thetime, σ2
i and µi are the variance and mean speed of node iduring each epoch,2 and 1/λi is mean epoch length for nodei.
This equation for link availability is modified using thefollowing assumptions. (1) All nodes have equal mean speedand variance during each epoch over the time period t, repre-sented by µ and σ . Hence µ and σ are defined as network pa-rameters instead of being node parameters. (2) Mean epochlength is uniform over the network and is given by λ. There-fore, λ is also a network parameter. Based on these assump-tions, (4) can be rewritten as follows:
Am,n(t) ≈ 1−Φ(
12
, 2,−4R2
eq
α
)
α = 4tλ
(σ2 + µ2).
(6)
In the next section, the proposed energy-aware rout-ing protocol (EARP) is presented and its energy efficiencyis compared with that of the ad hoc on-demand distance-vector (AODV) routing protocol.
2. ENERGY-AWARE ROUTING PROTOCOL
In energy-efficient routing protocol (EARP), the route dis-covery process is exactly the same as in AODV; the sourceS floods an RREQ to its neighbors and the neighbors floodRREQ further to their neighbors till it reaches an interme-diate node I which knows the route to the destination or itreaches the destination D. In addition to the above proce-dure, EARP will also maintain a table of routes that have lessprobability of expiring till the next communication betweenthe same set of nodes (S and D). The criterion to select theroutes eligible to be added to the routing table is based on
1The confluent hypergeometric function has a hypergeometric seriesgiven by Φ(a, b, z) = 1 + a · z/b + a(a + 1) · z2/b(b + 1) · 2! + · · · =∑∞
k=0((a)k/(b)k)(zk/k!).2Mobility epoch is the duration in the motion of a node during which its
speed and direction remain constant.
the network parameters and the probability of route validity(Proute-valid).
In AODV, once a transmission is completed the route isdeclared invalid after a fixed route expiry time (10 seconds)and cleared from the routing table, which results in frequentinitiation of route discovery process. The EARP scheme ad-vocates saving the routes discovered in the route discoveryprocess in a route table based on the route selection crite-rion. In order to accomplish this, we define a new controlpacket called route check request (RCR) in EARP. If after acertain interval of time, some data needs to be transferredbetween the same set of source (S) and destination (D), Swill first issue an RCR control packet to verify the validity ofthat route saved in the route table. RCR is a dummy packetwhich is sent across all the nodes that appear in the route toD. If any nodes between S and D have moved out of rangein this route, a route error (RERR) is transmitted back to S.On receiving this RERR, the source S initiates a route discov-ery for the destination D and removes the expired route fromrouting table.
The success rate of RCR will typically depend on the mo-bility pattern of the nodes in the sensor network. Saving allroutes in the routing table results in higher energy consump-tion due to excessive RCR transmissions. This problem is ad-dressed in EARP with the route selection criterion which al-lows only those routes with larger probability of route valid-ity to be saved. For each route, an appropriate route validitytime is computed based on the network parameters.
2.1. Criterion for selecting routes for savingin the routing table
In this subsection, a criterion is derived for selection ofroutes. This derivation is based on the three major param-eters: probability of link validity (Plink-valid), probability ofroute validity (Proute-valid), and threshold for probability ofroute validity (Proute-valid-threshold). In addition, the derivationalso requires estimates for the energy consumption in vari-ous phases of routing.
2.1.1. Probability of link validity (Plink-valid)
This is defined as the probability of any link which is valid att = 0, will remain valid at t = T (T > 0), and is given byAm,n(t). As a convention, it is referred to as Plink-valid, so from(6) we get
Plink-valid = 1−Φ(
12
, 2,−4R2
eq
α
)
α = 4Tλ
(σ2 + µ2),
(7)
where Φ(a, b, z) is the Kummer-Confluent hypergeometricfunction [13].
2.1.2. Probability of route validity (Proute-valid)
This is the probability that the route discovered using theRREQ flooding at t = 0 and which will be valid after time

638 EURASIP Journal on Wireless Communications and Networking
T. The expression for this probability is given by
Proute-valid =[
1−Φ
(12
, 2,−4R2
eq
α
)]h
. (8)
A route with h hops will have h such links. Thus, the proba-bility of route validity is [Plink-valid]h. The parameter h acts asa decay factor since the probability of route validity reducesas the number of hops in the route increases.
2.1.3. Threshold for probability of route validity(Proute-valid-threshold)
The threshold for the probability of route validity is the valueof Proute-valid at which the energy consumption in AODVis equal to the energy consumption in EARP. Beyond thisthreshold value, EARP outperforms AODV in terms of en-ergy efficiency. Hence, any route with probability of routevalidity higher than its threshold would save energy if reusedwithin the route validity time.
2.2. Energy consumption in routing
The following subsections discuss the energy estimates re-quired to compute Proute-valid-threshold. A set-up of typicalsource S and destination D that are h hops away is assumedin the following discussion.
2.2.1. Energy estimation in route discovery
In this scenario, the source S is trying to look for the desti-nation D and an RREQ is being flooded to every neighbor toget to D. The nodes S and D are h hops away and N is thenumber of nodes in the entire sensor network.
E1 (energy consumed at S to flood an RREQ packet) =[α1 + α2d4]∗ B ∗ t = P1.
E2 (energy consumed at neighbor to receive an RREQpacket) = αr ∗ tc ∗ B = P2.
E3 (energy consumed at neighbor to flood an RREQpacket) = P1.
E4 (energy consumed at D to receive an RREQ packet)= P2.
Eq (total energy consumed in transmitting RREQ from Sto D)= E1 +(E2 +E3)∗(number of intermediate nodes)+E4.
As the RREQ packet is flooded in the entire network, thenumber of intermediate nodes will be (N − 2), that is, all thenodes in the network except S and D. Therefore,
Eq = E1 +(E2 + E3
)∗ (N − 2) + E4
= P1 +(P1 + P2
)∗ (N − 2) + P2
= (P1 + P2)∗ (N − 1).
(9)
E5 (energy consumed at D to transmit an RREP packet)= [α1 + α2d4]∗ B ∗ tc = P3.
Here, tc is being used because RREP is not flooded as thelinks between all the nodes are bidirectional and RREP has tofollow the discovered path backwards.
E6 (energy consumed at neighbor to receive RREP)= P2.E7 (energy consumed at neighbor to transmit RREP) =
P3.E8 (energy consumed at S to receive RREP) = P2.Ep (the energy consumed in transmitting RREP from D
to S)= E5 + (E6 +E7)∗ (number of intermediate nodes) +E8.As RREP follows the path discovered by RREQ, it only
travels through the route of h hops:
Ep = E5 +(E6 + E7
)∗ (h) + E8,
Ep = P3 +(P2 + P3
)∗ h + P2 =(P2 + P3
)∗ (h + 1).(10)
The total energy consumed in the route discovery process(Erd) is the sum of Eq and Ep and is given by the followingexpression:
Erd =(P1 + P2
)∗ (N − 1) +(P2 + P3
)∗ (h + 1). (11)
2.2.2. Energy estimate for route table maintenance
EARP suggests saving those routes which do not expirewithin twice the AODV route expiry time. Once the routeis discovered in EARP, each packet stores the entire route.Hence, computation overhead is only at the source node S.Route entry is made by RREQ flooding and the size of routeentry depends on the number of hops between S and D. Allestimates in this section assume h hops between S and D. Theenergy consumed by CPU in route lookup depends on thesize of routing table. As there are N nodes in the network, themaximum size of the routing table could be (N − 1). Duringroute fetch, two basic operations are performed by the sourcenode. First, it has to compare each destination in routing ta-ble to the destination D. Later, it loads the route given for Din its cache. The associated overhead for each of the abovefunctions can be estimated in terms of bi (energy consumedin a memory fetch) and bj (energy consumed in an arith-metic operation), quite similar to the approach used in [14].
E9 (energy consumed in route lookup)= (bi+bj)·(N−1).E10 (energy consumed in loading route to cache)= bi ·h.
2.2.3. Energy estimate for an RCR Request
For consistency, the size of RCR packet is assumed to be equalto that of RREQ/RREP packet, though it can be much smallerwith just an “RCR bit” set. RCR is a one-way request, and ifno route error (RERR) is received within RCR expiry time,the route is declared valid and data transmission is carriedout.
E11 (energy consumed at S to transmit RCR to the nexthop) = [α1 + α2d4]∗ B ∗ tc = P3.
E12 (energy consumed at each hop to receive and trans-mit RCR to the next hop)= αr∗tc∗B+[α1 +α2d4]∗B∗tc =P2 + P3.
E13 (energy consumed at D to receive RCR) = P2.E14 (total energy consumed in route checking) = E11 +
E12∗h+E13 = P3 +(P2 +P3)∗h+P2 = (P2 +P3)∗(h+1). Ad-ditional computational overhead due to route-table lookup

Energy-Aware Routing Protocol 639
(E9) and loading of route to cache (E10) need to be added.Thus, the total energy ERCR consumed in RCR mechanism isgiven by
ERCR = E14 + E9 + E10 =(P2 + P3
)∗ (h + 1)
+(bi + bj
) · (N − 1) + bi · h.(12)
Proposition 1. (criterion for saving a route). All routes thatsatisfy Proute-valid>Proute-valid-threshold should be saved in the routingtable as they have a high probability of staying valid after timeinterval T. An implementation of this criterion would requirean estimation of the threshold for the probability of route va-lidity. Based on the energy consumption comparison betweenEARP and AODV, this estimation is given by the followinglemma.
Lemma 1. The value of threshold for the probability of routevalidity is given by
Proute-valid-threshold
=(P2 + P3
)∗ (h + 1) +(bi + bj
) · (N − 1) + bi · h(P1 + P2
)∗ (N − 1) +(P2 + P3
)∗ (h + 1),
(13)
where P1 = [α1 + α2d4] ∗ B ∗ t, P2 = αr ∗ tc ∗ B, P3 =[α1 +α2d4]∗B∗ tc, bi = energy consumed in a single memoryfetch, bj = energy consumed in a single arithmetic operation,and N = number of nodes in the network.
The value of Proute-valid at which the energy consump-tion in EARP equals the energy consumption in AODV isdefined as the threshold value of the probability of route va-lidity Proute-valid-threshold. In order to estimate Proute-valid-threshold,the total energy associated with routing in both AODV andEARP is compared assuming that there are M repeated trans-missions between S and D. These repeated transmissionshave time interval greater than the AODV route expiry time.Proute-valid gives the ratio of the number of successful trans-missions out of M before the route from S to D becomes in-valid.
Let A denote the total energy consumed using AODV forM route discoveries. Similarly, let B denote the total energyconsumed using the RCR mechanism for M transmissions.A and B are given by the following expressions:
A = [Eq + Ep]∗M
= [(P1 + P2)∗ (N − 1) +
(P2 + P3
)∗ (h + 1)]∗M,
B = ERCR ∗M +[Eq + Ep
]∗M ∗ (1− Proute-valid).
(14)
The threshold value for Proute-valid is obtained by equatingA and B and solving for Proute-valid. By simplifying, the thresh-old value of the probability of route validity given in (13) isobtained.
Proposition 1 suggests the duration for route validity,that is, how long a route should be saved in the routing table
(troute-valid). Energy savings are possible if for all saved routesthe probability of route validity stays above the probability ofroute validity threshold. It can be interpreted that as long asProute-valid is greater than Proute-valid-threshold, the route shouldbe kept in the routing table. Using this principle in conjunc-tion with Proposition 1, an estimate for troute-valid is derivedin Proposition 2.
Proposition 2. The time for which any route is valid is givenby
troute-valid ≈[
λ
4(σ2 + µ2
)][
R2eq
(Proute-valid-threshold)1/h
]. (15)
Proof. According to Proposition 1, energy savings can beexpected, if all routes in the routing table satisfy Proute-valid >Proute-valid-threshold. As Proute-valid reduces with time, the aboveinequality fails after a certain time interval (troute-valid). Thistime interval can be estimated by equating the Proute-valid toits threshold as follows:
Proute-valid =[
1−Φ(
12
, 2,−4R2
eq
α
)]h= Proute-valid-threshold.
(16)
Expanding the Kummer confluent hypergeometric seriesto obtain expression for Proute-valid, we get
Proute-valid =[
1−(
1− R2eq
α+R4
eq
α2− 5R6
eq
6α4+ · · ·
)]h
= Proute-valid-threshold.
(17)
Taking an approximation of the series till the secondterm, we get
[1−
(1− R2
eq
α
)]h≈ Proute-valid-threshold,
R2eq
α≈ (Proute-valid-threshold
)1/h,
α ≈ R2eq(
Proute-valid-threshold)1/h .
(18)
Substituting α = 4T/λ(σ2 + µ2),
4Tλ
(σ2 + µ2) ≈ R2
eq(Proute-valid-threshold
)1/h . (19)
Replacing T by troute-valid, we get
troute-valid ≈[
λ
4(σ2 + µ2
)][
R2eq(
Proute-valid-threshold)1/h
]. (20)

640 EURASIP Journal on Wireless Communications and Networking
Table 1: Values of parameters used for quantitative analysis.
Parameter Value
N (number of data gathering nodes) 20
α1 (communication constant) 45 nJ/b
α2 (communication constant) 10 pJ/b/m4
αr (communication constant) 135 nJ/b
d (average distance between nodes) 250 m
t (frame length) 14 milliseconds
tc (size of each slot in the frame) 2 milliseconds
B (link bandwidth) 64 kbps
bi (energy consumed in a single memory fetch) 7.32 nJ
bj(energy consumed in a single arithmetic operation) 3.41 nJ
Req (effective communication radius) 500 m1λ
(mean epoch length) 30 s
µ (mean speed) 10 kph ≈ 2.5 m/s
T (minimum time for route validity) 5 min
This is the maximum value of t for which the criteriondescribed in Proposition 1 is satisfied. This time troute-valid isset in the time field of routing table for each route. As soonas troute-valid expires, the route is removed from the routingtable. Based on the two propositions, we would now presenta quantitative analysis of energy savings obtained in EARP.
3. QUANTITATIVE ANALYSIS OF EARPAND SIMULATION RESULTS
3.1. Quantitative analysis
In this section, a quantitative analysis based on a practicalscenario is presented. A network with the typical values forall the defined parameters is assumed for this analysis; thesevalues are listed in Table 1.
Using the values in Table 1 and the expressions derived inearlier sections, the following values of energy consumptionin various phases are obtained: P1 = 34.94 J, P2 = 1.728 ∗10−5 J, P3 = 4.99 J. To give a practical interpretation tothe criterion of route selection, the values of Proute-valid andProute-valid-threshold for different values of h are estimated using(8) and (13), respectively. Table 2 lists the values of Proute-valid
and Proute-valid-threshold for 1 to 8 hops. In these estimations,the time T is taken to be 5 minutes.
The values in Table 2 clearly show that the value ofProute-valid is greater than Proute-valid-threshold for routes with lessthan or equal to 6 hops. So, nodes will save all routes with lessthan or equal to 6 hops in their routing table. An estimate ofthe expiry time based on (20) for all saved routes correspond-ing to the number of hops is also shown. By substituting thevalues into the expressions derived in the previous sections,42.58% energy savings are obtained with EARP over AODV,if a route of hop count 1 is used 10 times. If the route that isused repeatedly has a hop count 6, the energy savings drop to0.006%. These results are further strengthened by the simu-lation results discussed below.
Table 2: Estimated values of probabilities and associated expirytimes.
Hops Proute-valid-threshold Proute-valid troute-valid
1 0.0148 0.4401 35.81
2 0.0220 0.2919 15.54
3 0.0292 0.1937 10.54
4 0.0362 0.1285 8.46
5 0.0431 0.0852 7.36
6 0.0500 0.0565 6.68
7 0.0561 0.03752 —
3.2. Simulation results
In order to compare the performance of EARP with AODV,a network with forty nodes uniformly positioned over anarea of 2000 ∗ 2000 meters and mobility based on randomwalk model was simulated in Glomosim network simulator[15]. Implementation of dynamic route expiry for EARP re-quired modifications in the AODV implementation of Glo-mosim. AODV is implemented in Glomosim using aodv.pcand aodv.h files. The aodv.pc file was modified to allocatethe route expiry times dynamically based on the route hopcount. The simulation code was not programmed to calcu-late the route expiry values based on network paramaters;instead the scenarios were created and route expiry timesfor each hop count were estimated manually. The simula-tion code was modified to allocate these values to each newlyadded route based on its hop count.
The changes made it possible to simulate the effect of dy-namic route expiry time on the number of route requests andcontrol packets. The evaluation and comparison of EARPwith AODV was done by simulating various scenarios. Threemajor scenarios are discussed below based on the node mo-bility characteristics as it was found that mobility had maxi-mum effect on the number of route requests.

Energy-Aware Routing Protocol 641
RREQ-EARPRREQ-AODV
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Node number
0
500
1000
1500
2000
2500
3000
Nu
mbe
rof
RR
EQ
s
Figure 3: Scenario I: comparison of EARP and AODV in terms ofthe number of RREQ packets generated during high mobility.
RREP-EARPRREP-AODV
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Node number
0
100
200
300
400
500
600
Nu
mbe
rof
RR
EPs
Figure 4: Scenario I: comparison of EARP and AODV in terms ofthe number of RREP packets generated during high mobility.
3.2.1. Scenario I—high mobility
The mobility parameters in config.in Glomosim file werechanged to simulate high-mobility scenarios. The mobilitymodel used was a random waypoint mobility model, themaximum node speed was set to 10 m/s, and minimum nodespeed was zero with a zero pause time. As in high mobil-ity, the links between nodes would expire quickly so EARPwould not be able to keep routes for much longer in theroute cache. The energy savings in this case would be mini-mum. The graph in Figure 3 compares the RREQs generatedby both protocols under these conditions. For most nodesEARP saved some RREQs over AODV but in aggregate forall 40 nodes, EARP generated 3.6% less RREQs than AODV.The graph in Figure 4 shows the comparison of RREPs gen-erated by each node from 0 to 39 for both EARP and AODV.In aggregate EARP generated 4.95% less RREPs than AODV.The graph in Figure 5 shows the aggregate control packetsgenerated for each node by both protocols. EARP generated3.49% less control packets than AODV. The 3.49% may looklike a small figure, but the total control packets generatedby EARP for the period of simulation were 1748 packets less
Control-EARPControl-AODV
1 5 9 13 17 21 25 29 33 37
Node number
0
500
1000
1500
2000
2500
3000
Nu
mbe
rof
con
trol
pack
ets
Figure 5: Scenario I: comparison of EARP and AODV in terms ofthe number of control packets generated during high mobility.
RREQ-EARPRREQ-AODV
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Node number
0
1000
2000
3000
4000
5000
6000
7000
Nu
mbe
rof
RR
EQ
s
Figure 6: Scenario II: comparison of EARP and AODV in terms ofthe number of RREQ packets generated during medium mobility.
than AODV. If each packet is as small as 60 bytes, transmit-ting it over a 64 kbps link for a distance of 100 meters ap-proximately needs 0.1 joules of energy. Therefore, in such aworst case scenario, EARP was able to save around 175 joulesof energy over AODV.
3.2.2. Scenario II—medium mobility
As the node mobility decreases, the link availability increases.In scenarios with higher link availability, EARP is more ef-fective due to dynamic route caching. Medium mobility wassimulated by decreasing the mean speed of nodes in the ran-dom waypoint mobility model. The maximum speed was setto 3 m/s and minimum speed was set to zero with a pausetime of zero. The graph in Figure 6 compares the RREQsgenerated by both protocols under these conditions. In ag-gregate for all 40 nodes, EARP generated 22.12% less RREQsthan AODV. The graph in Figure 7 shows the comparison ofRREPs generated by each node from 0 to 39 for both EARPand AODV. In aggregate EARP generated 19.79% less RREPsthan AODV. The graph in Figure 8 shows the aggregate con-trol packets generated for each node by both protocols. EARP

642 EURASIP Journal on Wireless Communications and Networking
RREP-EARPRREP-AODV
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Node number
0
100
200
300
400
500
600
700
Nu
mbe
rof
RR
EPs
Figure 7: Scenario II: comparison of EARP and AODV in terms ofthe number of RREP packets generated during medium mobility.
Control-EARPControl-AODV
1 5 9 13 17 21 25 29 33 37
Node number
0
1000
2000
3000
4000
5000
6000
7000
Nu
mbe
rof
con
trol
pack
ets
Figure 8: Scenario II: comparison of EARP and AODV in terms ofthe number of control packets generated during medium mobility.
generated 21.01% less control packets than AODV. The totalcontrol packets generated by EARP for the period of simula-tion were 12 335 packets less than AODV. Based on the sim-ilar packet size, this amounts to energy savings of approxi-mately 1233 joules.
3.2.3. Scenario III—low mobility
Low mobility was simulated to represent close to a best casescenario, where the nodes do not lose links very frequently.This case can be used to demonstrate an upper bound on en-ergy savings in an ad hoc wireless environment. Low mobil-ity was simulated by increasing the pause time of nodes in therandom waypoint mobility model. The maximum speed wasset to 3 m/s and minimum speed was set to zero with a pausetime of 1000 seconds. The graph in Figure 9 compares theRREQs generated by both protocols under these conditions.In aggregate for all 40 nodes, EARP generated 48.05% lessRREQs than AODV. The graph in Figure 10 shows the com-parison of RREPs generated by each node from 0 to 39 forboth EARP and AODV. In aggregate EARP generated 51.08%less RREPs than AODV. The graph in Figure 11 shows theaggregate control packets generated for each node by both
RREQ-EARPRREQ-AODV
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Node number
0
1000
2000
3000
4000
5000
6000
7000
Nu
mbe
rof
RR
EQ
s
Figure 9: Scenario III: comparison of EARP and AODV in terms ofthe number of RREQ packets generated during low mobility.
RREP-EARPRREP-AODV
1 4 7 10 13 16 19 22 25 28 31 34 37 40
Node number
0
100
200
300
400
500
600
700
Nu
mbe
rof
RR
EPs
Figure 10: Scenario III: comparison of EARP and AODV in termsof the number of RREP packets generated during low mobility.
protocols. EARP generated 49.20% less control packets thanAODV. The total control packets generated by EARP for theperiod of simulation were 34 874 packets less than AODV.Based on the similar packet size, this amounts to energy sav-ings of over 3 kilojoules.
4. CONCLUSIONS
This paper provides a quantitative analysis of energy con-sumption estimates in flooding and directed broadcast meth-ods. The difference between these methods is used to provethe efficiency of EARP over AODV. EARP includes mobil-ity and number of hops as parameters in estimating the life-time of a route and suggests a unique way to accurately es-timate the validity period of a route, thus reducing the re-peated transmission of route requests. The major disadvan-tage of AODV is its overhead due to the high number of routediscoveries previously discussed in [16], and EARP definesa technique to reduce these route discoveries, which is themost critical part of ad hoc wireless sensor networks. EARPis well suited for sensor networks due to its ability to adaptto the environment and make routing decisions based on the

Energy-Aware Routing Protocol 643
Control-EARPControl-AODV
1 5 9 13 17 21 25 29 33 37
Node number
0
1000
2000
3000
4000
5000
6000
7000
Nu
mbe
rof
con
trol
pack
ets
Figure 11: Scenario III: comparison of EARP and AODV in termsof the number of control packets generated during low mobility.
communication patterns. Relative mobility between sensornodes is frequently demonstrated in the common sensor net-work applications. In our future work, relative mobility willbe included in the model to estimate the route expiry time.
ACKNOWLEDGMENT
This work was carried out under the research Grant “A Low-Energy Wireless Ad Hoc Sensor Networks Test-bed” spon-sored by Kansas NSF EPSCoR.
REFERENCES
[1] C. E. Perkins and P. Bhagwat, “Highly dynamic destination-sequenced distance-vector routing (DSDV) for mobile com-puters,” in Proc. ACM SIGCOMM ’94 Conference on Com-munications Architectures, Protocols and Applications, pp. 234–244, London, UK, August–September 1994.
[2] C. E. Perkins and E. M. Royer, “Ad-hoc on-demand distancevector routing,” in Proc. 2nd IEEE Workshop on Mobile Com-puting Systems and Applications (WMCSA ’99), pp. 90–100,New Orleans, La, USA, February 1999.
[3] D. B. Johnson and D. A. Maltz, “Dynamic source routing in adhoc wireless networks,” in Mobile Computing, vol. 353, chap-ter 5, pp. 153–181, Kluwer Academic, Boston, Mass, USA,1996.
[4] G. Kunito, K. Yamazaki, H. Morikawa, and T. Aoyama, “Anad-hoc routing control method in sensor networks,” in Proc.26th Annual Conference of the IEEE Industrial Electronics Soci-ety (IECON ’00), vol. 2, pp. 1147–1152, Nagoya, Japan, Octo-ber 2000.
[5] S. Gundeti, T. Best, R. Bhagavathula, and R. Pendse, “SARP:an Analytical Evaluation,” submitted for publication.
[6] W. B. Heinzelman, A. P. Chandrakasan, and H. Balakrishnan,“An application-specific protocol architecture for wireless mi-crosensor networks,” IEEE Transactions on Wireless Communi-cations, vol. 1, no. 4, pp. 660–670, 2002.
[7] S. Dulman, L. van Hoesel, T. Nieberg, and P. Havinga, “Col-laborative communication protocols for wireless sensor net-works,” in Proc. European Research on Middleware and Archi-tectures for Complex and Embedded Cooperative Systems Work-shop, pp. 3–7, Pisa, Italy, April 2003.
[8] N. Bansal and Z. Liu, “Capacity, delay and mobility in wirelessAd-hoc networks,” in Proc. 22nd Annual Joint Conference ofthe IEEE Computer and Communications Societies (INFOCOM’03), vol. 2, pp. 1553–1563, San Francisco, Calif, USA, March–April 2003.
[9] K. Sohrabi, J. Gao, V. Ailawadhi, and G. J. Pottie, “Protocolsfor self-organization of a wireless sensor network,” IEEE Pers.Commun., vol. 7, no. 5, pp. 16–27, 2000.
[10] D. D. Falconer, F. Adachi, and B. Gudmundson, “Time divi-sion multiple access methods for wireless personal communi-cations,” IEEE Commun. Mag., vol. 33, no. 1, pp. 50–57, 1995.
[11] Y. Thomas, Y. Shi, J. Pan, A. Efrat, and S. Midkiff, “Max-imizing lifetime of wireless video sensor networks throughoptimal flow routing,” in Proc. IEEE Military Communica-tions Conference (MILCOM ’03), Boston, Mass, USA, October2003.
[12] T. S. Rappaport, Wireless Communications, Principles andPractice, Prentice-Hall, Upper Saddle River, NJ, USA, 1996.
[13] A. B. McDonald and T. Znati, “A path availability model forwireless ad-hoc networks,” in Proc. IEEE Wireless Communi-cations and Networking Conference (WCNC ’99), vol. 1, pp.35–40, New Orleans, La, USA, September 1999.
[14] R. Szewczyk and A. Ferencz, “Energy implications of networksensor designs,” Tech. Rep., Berkeley Wireless Research Cen-ter, Santa Clara, Calif, USA, 2000.
[15] L. Bajaj, M. Takai, R. Ahuja, K. Tang, R. Bagrodia, and M.Gerla, “Glomosim: a scalable network simulation environ-ment,” Tech. Rep. 990027, Computer Science Department,University of California, Los Angeles, Calif, USA, 1999.
[16] C. E. Perkins, E. M. Royer, S. R. Das, and M. K. Marina,“Performance comparison of two on-demand routing proto-cols for ad hoc networks,” IEEE Pers. Commun., vol. 8, no. 1,pp. 16–28, 2001.
Raminder P. Mann received his B.E. degreein electrical engineering from Thapar Insti-tute of Engineering and Technology, India,in 2001. He received his M.S. degree in elec-trical engineering from Wichita State Uni-versity, USA, in 2004. During his M.S. study,he worked on various research projects, fo-cusing on energy efficiency in routing pro-tocols for wireless ad hoc sensor networks.He presented some of his work at IEEEGLOBECOM ‘04. He was awarded the Outstanding MS StudentAward by Wichita State University for his achievements. He is cur-rently working as a Senior Engineer in the consultancy division ofSouthern Kansas Telephone (SKT) Company and works on the de-sign and implementation of IP telephony projects.
Kamesh R. Namuduri received his B.E. de-gree in electronics and communication en-gineering from Osmania University, India,in 1984, M. Tech. degree in computer sci-ence from the University of Hyderabad, in1986, and Ph.D. degree in computer sci-ence and engineering from the University ofSouth Florida, in 1992. He has worked inC-DoT, a telecommunication firm in India,from 1984 to 1986. Currently, he is with theElectrical and Computer Engineering Department at Wichita StateUniversity as an Assistant Professor. His areas of research interestinclude information security, image/video processing and commu-nications, and ad hoc sensor networks. He is a Senior Member ofIEEE.

644 EURASIP Journal on Wireless Communications and Networking
Ravi Pendse is an Associate Vice Presidentfor Academic Affairs and Research, WichitaState Cisco Fellow, and Director of the Ad-vanced Networking Research Center at Wi-chita State University. He has received hisB.S. degree in electronics and communica-tion engineering from Osmania University,India, in 1982, M.S. degree in electrical en-gineering from Wichita State University, in1985, and Ph.D. degree in electrical engi-neering from Wichita State University, in 1994. He is a Senior Mem-ber of IEEE. His research interests include ad hoc networks, voiceover IP, and aviation security.

EURASIP Journal on Wireless Communications and Networking 2005:5, 645–660c© 2005 Bosheng Zhou et al.
A Cross-Layer Route Discovery Frameworkfor Mobile Ad Hoc Networks
Bosheng ZhouAdvanced Telecommunication Systems Laboratory, School of Electrical and Electronic Engineering, Queen’s University of Belfast,Stranmillis Road, Belfast BT9 5AH, Northern Ireland, UKEmail: [email protected]
Alan MarshallAdvanced Telecommunication Systems Laboratory, School of Electrical and Electronic Engineering, Queen’s University of Belfast,Stranmillis Road, Belfast BT9 5AH, Northern Ireland, UKEmail: [email protected]
Jieyi WuResearch Center of Computer Integrated Manufactural System (CIMS), Southeast University, Nanjing 210096, ChinaEmail: [email protected]
Tsung-Han LeeAdvanced Telecommunication Systems Laboratory, School of Electrical and Electronic Engineering, Queen’s University of Belfast,Stranmillis Road, Belfast BT9 5AH, Northern Ireland, UKEmail: [email protected]
Jiakang LiuAdvanced Telecommunication Systems Laboratory, School of Electrical and Electronic Engineering, Queen’s University of Belfast,Stranmillis Road, Belfast BT9 5AH, Northern Ireland, UKEmail: [email protected]
Received 11 June 2004; Revised 12 May 2005
Most reactive routing protocols in MANETs employ a random delay between rebroadcasting route requests (RREQ) in orderto avoid “broadcast storms.” However this can lead to problems such as “next hop racing” and “rebroadcast redundancy.” Inaddition to this, existing routing protocols for MANETs usually take a single routing strategy for all flows. This may lead toinefficient use of resources. In this paper we propose a cross-layer route discovery framework (CRDF) to address these problemsby exploiting the cross-layer information. CRDF solves the above problems efficiently and enables a new technique: routing strategyautomation (RoSAuto). RoSAuto refers to the technique that each source node automatically decides the routing strategy basedon the application requirements and each intermediate node further adapts the routing strategy so that the network resourceusage can be optimized. To demonstrate the effectiveness and the efficiency of CRDF, we design and evaluate a macrobian routediscovery strategy under CRDF.
Keywords and phrases: ad hoc networks, routing, CRDF, cross-layer design, quality of service.
1. INTRODUCTION
A mobile ad hoc network (MANET) is an autonomous sys-tem comprising a set of mobile nodes that can move aroundfreely. Because MANETs do not need any fixed infrastructure
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
and can be easily and quickly deployed they have been at-tracting high interest in both military and civil applica-tions. A MANET is generally formed as a multihop wire-less network due to limited transmission range of wirelesstransceivers. Routing plays an important role in the opera-tion of such a network. Each node acts as both a router and ahost.
MANETs are considered to be (1) resource limited, forexample, low wireless bandwidth, limited battery capacity

646 EURASIP Journal on Wireless Communications and Networking
and computing power, and (2) dynamic in nature, for ex-ample, topology dynamics (due to failures, joining/leaving,and/or mobility of nodes), resource variation (due to theconsumption of resources or to the traffic flowing throughthe network), and channel dynamics (due to fading, mul-tipath, interference, noise, and the like). The conventionalrouting protocols for fixed networks are no longer appropri-ate for MANETs due to (1) the heavy routing overheads thatconsume too many resources such as bandwidth and energy,and (2) the convergence time of the protocols which is toolong compared with the dynamics of a MANET. Variousrouting protocols have been proposed to address above chal-lenges. Existing MANET routing protocols can be generallyclassified into three categories: proactive, reactive, and hy-brid. Proactive routing protocols, which are adapted fromconventional routing protocols for wired networks, are table-driven and rely on periodical exchange of route/link in-formation. Each node maintains route entries to all othernodes of the entire network. In large and highly dynamicMANETs, frequent routing information exchanges have to beperformed to keep routing information up to date, and thisleads to heavy routing overhead and thus heavy resource con-sumption. Reactive and hybrid routing protocols have beenproposed to address these problems [1, 2, 3, 4, 5, 6, 7, 8].In reactive routing protocols, each node only maintains ac-tive route entries and discovers routes only when needed.Routing overhead and routing table storage can thus be re-duced. In hybrid protocols, a network is partitioned intoclusters or zones. Proactive and reactive routing protocolsare then deployed in intracluster/intrazone and interclus-ter/interzone, respectively. The major advantage of hybridrouting is improved scalability; however, hierarchical addressassignment and zoning/clustering management are compli-cated and can lead to heavy control overheads in highly dy-namic networks.
In this paper, we focus on route discovery strategies forreactive routing protocols in IEEE 802.11-based MANETs.
The operation of a reactive routing protocol has three ba-sic stages: route discovery, packet delivery, and route mainte-nance. Different reactive routing protocols are distinguishedby the different strategies used in route discovery and routemaintenance. Generally, route discovery is more costly in adynamic network since it may need several route discoveriesin a communication session because of network dynamics.
Route discovery for reactive routing protocols usuallyworks as follows.
(S1) Source S initiates a route request (RREQ) and broad-casts it to its neighbours.
(S2) On receiving an RREQ, each node rebroadcasts it.Each node usually only rebroadcasts the first copy ofa RREQ so as to limit routing overhead.
(S3) The destination D sends a route reply (RREP) to Swhen it receives RREQ(s) directed to it.
In step (S2), each node usually rebroadcasts an RREQ ina random delay, for example, in AODV [7] and DSR [8], so asto avoid “broadcast storm” due to synchronization as identi-
C FE
S A B D
G IH
Link
Figure 1: A route discovery example: S to D.
fied by Ni et al. [9]. In this paper we abbreviate this randomrebroadcast delay route discovery approach as RD-random.Li and Mohapatra [3] argued that RD-random might notfind the most desirable route, and Zhou et al. [10] demon-strated that flooding, which is a broadcasting scheme usingrandom rebroadcast delay, cannot guarantee the least delay.
Figure 1 illustrates a route discovery scenario. Two of thepossible paths from source S to destination D are shown inthe figure, that is, path S–C–E–F–D and the shortest pathS–A–B–D. Two problems exist if RD-random is applied inthis scenario. (1) Path S–C–E–F–D may be selected instead ofthe shortest path S–A–B–D by the destination D because thenext hop of a constructing path in RD-random is randomlyselected. This phenomenon was identified as “next-hop rac-ing” problem in [3]. (2) All nodes except for the destinationD will rebroadcast the RREQ. This is not a serious problemin this scenario; however it will lead to heavy routing over-head and consequent implications such as extra bandwidthand energy consumption in a large-scale dynamic network.We identify this phenomenon as “rebroadcast redundancy”problem.
A number of solutions have been proposed to solve either“next-hop racing” or “rebroadcast redundancy” individually[1, 2, 3, 4, 5, 6, 7, 8].
The key motivation of this paper is to address both theseproblems by introducing a cross-layer route discovery frame-work (CRDF) combining a virtual device information man-ager (VDIM) and a priority-based route discovery strategy(PRDS). CRDF also enables the technique of routing strategyautomation (RoSAuto) for MANETs. RoSAuto refers to thetechnique that each source node automatically creates ap-propriate routing strategies as per the application require-ments while intermediate nodes further adapt the routingstrategy according to the available resources such as energylevel and link capacity. By combining these two techniques,one can provide QoS routing while optimizing the resourceutilization. To our knowledge, this is the first paper to addressthe RoSAuto concept in MANETs. Existing routing protocolsusually implement a single routing strategy for all kinds ofapplications throughout the network.
The cross-layer design can be applied to a broad rangeof areas in mobile ad hoc networking. QoS provisioning isone of the most important research areas where the QoS

Route Discovery Framework for Mobile Ad Hoc Networks 647
routing plays a key role in providing paths with enough re-sources to deliver packets. Examples of cross-layer designfor QoS provisioning in MANETs include an adaptive ser-vice model—utility-fair [16]— an adaptive resource man-agement architecture—TIMELY [17]— an end-to-end QoSframework—INSIGNIA [18]— a per-flow dynamic QoSscheme—dRSVP protocol [19]— a distributed and statelessnetwork model—SWAN [20]— and a bandwidth manage-ment scheme —BM [21].
In this paper, we specifically apply the cross-layer de-sign in the routing area in MANETs. By exploiting the cross-layer information, the proposed routing framework can alsomeet the general requirements of QoS routing with the as-sumption of the availability of the relevant QoS parametersthrough cross-layer feedback.
The rest of this paper is organized as follows. Section 2describes the related works including the cross-layer designand routing in mobile ad hoc networks. Details of CRDF aregiven in Section 3. As an example, a macrobian route strategyis described in Section 4. Simulation results can be found inSection 5. Finally, the paper is concluded in Section 6.
2. RELATED WORKS
2.1. Cross-layer design in MANETs
The layering design of the standard protocol stacks hasachieved great success [22] in wired networks. It separatesabstraction from implementation and is thus consistent withsound software engineering principles—information hidingand end-to-end principle. However, protocol stack imple-mentations based on layering do not function efficiently inmobile wireless environments [23]. This results from thehighly variable nature of wireless links and the resource lim-itation nature of mobile nodes. As a solution, there has re-cently been a proliferation in the use of cross-layer designtechniques in wireless networks.
The concept of cross-layer design is not new in the net-working area. In some early works [24, 25], cross-layer designhas been proven to be effective in wired networks. Howeverthe cross-layer design principles have greater importance inad hoc networks because of the unique features of these envi-ronments [26]. Firstly, different layers are more likely to usethe same information in decision making. For example, thelink and channel states, locations of the nodes, and topologyinformation of the network are commonly used by both therouting and the application/middleware layers in computingroutes and making higher-level decisions. Secondly, in a fastchanging ad hoc environment, different layers need to co-operate closely to meet the QoS requirements of the mobileapplications. This goal can be better achieved when the rout-ing layer shares the MAC-layer information such as channelbandwidth, link quality, and the like.
Cross-layer design allows interaction between any layers.This means a layer can interact with layers above or below it.Raisinghani and Iyer [22] discussed the benefits of cross-layerfeedback on the mobile device and presented an architectureto enable efficient cross-layer feedback.
Cross-layer feedback can be applied on each layer in theprotocol stack [22, 26, 27]: (1) TCP may share packet lossand available throughput information with the applicationlayer so that the application can adapt accordingly; (2) thelink/MAC layer may adjust transmission power of the phys-ical layer to control bit-error rate; (3) the network layer mayadjust transmission power of the physical layer to control thetopology; (4) packet scheduling may make use of the channelstate information to adapt it to the dynamic environment.
In the work of Chen et al. [26], the middleware and therouting share information and actively communicate witheach other to achieve high data accessibility for applications.
ElBatt et al. proposed a cross-layer scheme [28] to en-hance the TCP performance by controlling the number ofneighbours, which is in turn controlled by the adjustmentof the transmission power. Balakrishnan et al. [29] proposeda link layer snoop on TCP packets to improve TCP perfor-mance. Yang et al. [30] presented an end-to-end link stateaware TCP (TCP-ELSA) which adjusts the sending rate of aTCP flow according to the wireless link quality.
Nahrstedt et al. [27] presented a survey on cross-layer ar-chitectures for bandwidth management in wireless networks.Shah et al. [21] proposed a bandwidth management sys-tem for single-hop ad hoc wireless networks. The single-hopad hoc wireless network, without a base-station, representsthe network used in smart-rooms, hot-spot networks, emer-gency environments, and in-home networking. The architec-ture of the bandwidth management system consists of threemajor components: (a) rate adaptor (RA) at the applicationor middleware layer, which is used to regulate the applica-tions’ traffic; (b) per-node total bandwidth estimator (TBE)at the MAC-layer, which estimates the total network band-width for each flow sourced at the node it resides on; and (c)bandwidth manager (BM), which performs admission con-trol. The architecture takes advantage of cross-layer interac-tion between the application/middleware and link layers. Thebandwidth requirement at the application/middleware layeris mapped to a channel time proportion requirement at theMAC layer.
Some works use channel state information to optimizethe packet scheduling [31]. Energy efficient wireless packetscheduling and fair queuing schemes were presented in [32].In [33], a simple approach was proposed to adapt the existingpacket fair queuing (PFQ) algorithms for the wired networksto provide the same kind of long-term fairness guaranteeswhile making efficient use of the wireless bandwidth.
We can see from the above that different cross-layer de-sign proposals are aimed at the same goal—achieving perfor-mance improvements in wireless environments.
2.2. Routing discovery strategies in MANETs
To address the problems discussed in Section 1, that is,the “next-hop racing” and the “rebroadcast redundancy,”many new routing discovery strategies have been proposedin various kinds of routing protocols, which mostly takeadvantage of cross-layer information exchanges. We classifythese strategies into three categories, namely better quality

648 EURASIP Journal on Wireless Communications and Networking
strategy, lower routing overhead strategy, and better qualityand lower routing overhead strategy.
2.2.1. Better quality strategy
This class of strategy focuses on finding routes that have bet-ter quality. The quality of a route can be represented as routestability, load balance, energy awareness, and so forth. Mostof the routing protocols falling into this category are QoS ori-ented.
The CEDAR routing algorithm presented by Sivakumaret al. [1] is a hierarchical routing approach. It uses the linkstate information, that is, bandwidth, to maintain a “corenetwork” which comprises a set of nodes called the core.The core nodes try to dynamically maintain stable high-bandwidth links. The selection of routes is done with theconsideration of the quality of service a link could provide.A node joins or leaves the core responding to the availablebandwidth.
Chen and Nahrstedt [2] proposed a tick-based QoS rout-ing scheme which selects multiple paths using impreciselink state information such as delay and bandwidth. In theirscheme, a ticket is the permission to search one path. Thesource node issues a number of tickets based on the avail-able state information. The tickets are distributed amongstthe neighbours according to their available resources.
Li and Mohapatra [15] proposed a positional attribute-based-next-hop determination approach (PANDA) to ad-dress the “next-hop racing” problem. PANDA uses positionalattributes such as relative distance, link lifetime, and trans-mission power consumption, to discriminate neighbouringnodes as good or bad candidates for the next hop. Good can-didates have shorter rebroadcast RREQ delay than bad can-didates. Better quality routes can then be found in this way asgood next hop candidates usually rebroadcast RREQs morequickly.
Some efforts have been made to find stable or longer-lived routes [13, 14]. Toh [14] proposed an associativity-based routing (ABR) protocol for discovering longer-livedroutes. ABR defines a new routing metric—associativity: thedegree of association stability. Each node periodically issuesbeacons to signify its existence. A beacon triggers the asso-ciativity tick of receiving node with respect to the beaconingnode to be incremented. In ABR, the destination selects theroute with highest degree of association stability, which mayindicate the relative mobility between nodes.
A signal stability-based adaptive routing protocol (SSA)[13], which is a logical descendant of ABR, was proposedto select routes based on signal strength. In SSA, a signalstability table (SST) is used to record the signal strength ofneighbouring nodes; channels are discriminated as strong orweak according to signal strength. RREQs are rebroadcastonly when they are received over strong channels and havenot been processed before. The destination chooses the firstarriving RREQ and replies to the source. The route chosen bythe destination in this way may have strong stability becauseRREQs received over weak channels have been dropped atintermediate nodes.
Some solutions focus on traffic load balance in the net-work [11, 12, 34]. In [12], Lee and Gerla proposed a dy-namic load aware routing (DLAR), which uses the load ofthe intermediate nodes as the main route selection metric.The network load of a mobile node is defined as the num-ber of packets in its interface queue. Each intermediate nodeattaches its load information to RREQ and rebroadcasts it.The destination then selects the most proper route among allreceived routes and replies to the source. Similarly, Wu andHarms [34] proposed a load-sensitive routing (LSR) proto-col. In LSR, the network load in a node, that is, traffic load,is defined as the summation of the number of packets beingqueued in the interfaces of the mobile node and its neigh-bours. LSR considers the total path load (cumulative trafficload along the path) as the main criterion and the standarddeviation of path load as the second criterion in route se-lection. In [11], Katzela and Naghshineh proposed a load-balanced ad hoc routing (LBAR) protocol. The load metricin a node is defined as the total number of routes passingthrough the node and its neighbours; the destination selectsthe least congested path based on this load metric.
Mobile nodes usually operate on batteries that have lim-ited capacity. Thus, how to properly use the limited energyis a quite important issue in mobile ad hoc networks. Energyaware schemes try to optimize energy usage in the network.Some approaches try to achieve energy conservation by re-constructing the logical topology of the network [35]; othersaddress the problem from a link cost viewpoint by identify-ing various energy-efficient cost metrics for routing [36, 37].Singh et al. [36] addressed the issue of increasing node andnetwork life by taking power aware metrics into account inroute discovery. They presented five power-aware metrics forroute discovery, that is, minimum energy consumed/packet,maximize time to network partition, minimize variance innode power levels, minimize cost/packet, and minimize max-imum node cost. These power-aware metrics focus on differ-ent power consumption issues.
In [38], a clustering scheme is applied to a wireless adhoc network. Cluster heads then handle most of the routingload in a power-efficient manner. In [39], several algorithmsfor discovering energy efficient broadcast and multicast treesare presented. In [40], an energy efficient routing protocolevenly distributes the traffic load in the network in order tomaximize the lifetime of the forwarding nodes.
Gomez et al. [41] proposed a dynamic power-controlledrouting scheme (PARO) that helps to minimize the trans-mission power in forwarding packets in ad hoc networks. InPARO, one or more intermediate nodes called “redirectors”elects to forward packets on behalf of source-destinationpairs. In [42] microsensor nodes use signal attenuation infor-mation to route packets towards a fixed destination known toall nodes in an energy efficient way.
Location-based routing schemes exploit the location in-formation from the positioning system to predict new loca-tion, delay, and link lifetime, which are used for routing de-cisions and data forwarding so as to improve routing quality[43, 44, 45] or alleviate routing overhead [4, 15].

Route Discovery Framework for Mobile Ad Hoc Networks 649
2.2.2. Lower routing overhead strategy
Many techniques such as caching [8], query localization[46, 47], and hybrid routing have been proposed to reducerouting overhead in MANETs. DSR uses route cache to re-duce route discoveries when the requested route is availablein the cache; AODV uses an expanding ring search to limitthe RREQ flooding area.
Castaneda and Das[46] proposed query localization pro-tocols based on the notion of spatial locality, namely, the factthat a mobile node cannot move too far too soon. When aroute breaks up, the route rediscovery is limited in the vicini-ties of the previous route. Routing overhead can thus be re-duced.
To overcome the high control overhead induced by un-controlled flooding, the OLSR [48] imposes a hierarchy onthe mobile ad hoc network. It adopts the MPR scheme,where certain nodes are elected as multipoint relays (MPRs)for their neighbourhoods. Nodes that are not MPRs receiveand process the flooded messages from their neighbourhoodMPRs, but do not rebroadcast them. Only the designatedMPRs rebroadcast the flooded messages. Thus, overhead isreduced because there are fewer copies of the message in thenetwork as compared to the number of copies that would begenerated if un-controlled flooding was done.
Cluster-based [49] and zone-based [5, 6] routing pro-tocols usually use hybrid routing technique, namely, proac-tive in intracluster/intrazone routing and reactive in inter-cluster/interzone routing, to reduce routing overhead. Somecontrol messages such as state information may only have tobe propagated within a cluster or a zone.
Location-aided routing (LAR) [4] makes use of physi-cal location information of destination node to reduce thesearch space for route discovery. LAR defines a request zoneusing location information which specifies where the desti-nation node may reside in a high probability. It limits routediscovery to the smaller request zone of the network. Thisresults in a significant reduction in the number of routingmessages.
Li and Mohapatra proposed a location-aided knowledgeextraction routing (LAKER) protocol to reduce routing over-head [15]. LAKER utilizes a combination of caching strategyin dynamic source routing (DSR) and limited flooding areain location-aided routing (LAR) protocol [4]. It is suitable forthe case where mobile nodes are not uniformly distributed.It gradually discovers geographical location information andconstructs guiding routes in route discoveries, which can befurther used to limit the search space in later route discover-ies.
2.2.3. Better quality and lower routing overhead
All of the above approaches address either the “next-hopracing” or the “rebroadcast redundancy” as independentproblems. Connected-dominating-set (CDS)-based ap-proaches [50, 53] potentially have the ability to deal withboth problems. CDS-based approaches use neighbourhoodor global information to select the set of nodes that form aCDS for the network where all nodes are either a member
of the CDS or a direct neighbour of one of the members.Searching space for a route is reduced to nodes in the set.Wu et al. [50] proposed a method-calculating power-awarefor connected dominating set to prolong the life span of thenetwork. On the other hand, CDS-based approaches needto maintain 2- or 3-hop neighbour information or globaltopology information for CDS formation. It is difficult tokeep this information up to date in a dynamic environment.In addition to this, CDS based solutions introduce theoverhead of “hello” messages.
Cluster-based routing protocols could be used to solveboth problems as well via proper adaptation. However, theclustering maintenance itself is difficult in a dynamic envi-ronment in addition to the extra control overhead.
In this paper, we propose a cross-layer route discoveryframework (CRDF) to address both problems without extracontrol overhead. The kernel engine of the architecture is thepriority-based route discovery strategy (PRDS) [51]. PRDSuses distributed algorithms with cross-layer information toconstruct quality routes while reducing the control overhead.PRDS is based on our previous work—a priority-based com-petitive broadcasting algorithm (PCBA) [10]. PCBA is an ef-ficient broadcast protocol for MANETs. It enhances broad-cast performance while reducing broadcasting overhead byusing the priority-based competing mechanism. It sets re-broadcast priority in proportion to extra coverage area of apotential rebroadcast so as to propagate broadcast messagesthroughout the network quickly. In this paper, we improvethe PCBA mechanism and use it in route discovery to solveboth the “next-hop racing” problem and the “rebroadcast re-dundancy” problem.
3. CRDF
3.1. CRDF overview
The cross-layer route discovery framework (CRDF) is de-signed to provide a flexible architecture for searching desir-able routes with low control overhead and to enable RoSAutofor MANETs. CRDF is divided into two main parts: thepriority-based route discovery strategy (PRDS) [51] and thevirtual device information manager (VDIM). Figure 2a il-lustrates the logical relationship between the componentsof CRDF. Cross-layer information is provided by a set ofAPIs. In Figure 2a, VDIM manages cross-layer informationand provides a set of unique APIs to access the informa-tion. Upper-layer agents manage the upper-layer informa-tion. Each device agent is responsible for communicationswith the related device driver and providing state informa-tion of the device. For example, a wireless device agent com-municates with the wireless card driver and manages wire-less information such as signal strength, channel state, andchannel throughput; a global positioning system (GPS) agentcommunicates with GPS driver and manages position in-formation of the node such as coordinates and velocity ofthe node and the time synchronized by the GPS satellites.The information provided by these agents can be accessedvia APIs. PRDS exploits the cross-layer information to en-able RoSAuto. In Figure 2b, RoSAuto automatically generates

650 EURASIP Journal on Wireless Communications and Networking
Upper layers
Upper layer agents
APIs
CRDF VDIM
PRDS
MAC
Other deviceagents
Wirelessagent
GPS agent
Other devicedrivers
Wireless carddriver GPS driver
Device drivers
(a)
Applicationrequirements
Source
Routing strategygeneration
RREQ
RREP
Intermediatenode
Routing strategyadaptation
RREQ
RREP
Destination
Route selection
Local resourceavailability
RREQ: route request
RREP: route reply
(b)
Figure 2: (a) The cross-layer route discovery framework. (b) Routing strategy automation.
appropriate routing strategies for different applications, forexample, least delay path for real-time applications and leastcost path for best-effort applications. The routing strategy isfurther adapted at intermediate nodes according to the avail-ability of local resources, and this information is obtainedfrom the lower layers in each intermediate node.
The mechanism for PRDS to solve the “next-hop rac-ing” problem and the “rebroadcast redundancy” problem iseasy to understand. It assigns a high rebroadcast priority toa “good” candidate for the next hop to solve the “next-hopracing” problem; it uses a competing procedure to prohibit“bad” candidates for the next hop from rebroadcast so as tosolve “rebroadcast redundancy” problem. In PRDS, a “good”candidate for the next hop will go more “quickly” than a“bad” candidate. A “bad” candidate may quit the race if itfeels that it has lost the competition. With this mechanismthe first arriving RREQ at the destination has the high proba-bility of having travelled through a desirable path comprising“good” candidates. The destination simply selects the path(s)
through which the first or the first k arriving RREQ(s) havetravelled. In the latter case, multiple paths can be used to dis-tribute communication load.
3.2. The procedure of PRDS
In PRDS, each node maintains a competing state table (CST).A CST contains three fields.
(i) RREQ ID that is used to identify a unique RREQ. It isrepresented as “source ID, broadcast sequence”.
(ii) The duplicate number (nh) of the same RREQ that anode has received. nh is initialised to 1 when a nodereceives the first copy of a new RREQ. It also representsthe competing state. It is set to 0 when the competitionis over. Any following RREQs will be deleted as long astheir related nh equals 0.
(iii) The timestamp of receiving the first copy of the RREQ.This field is used to maintain the CST with a soft state,that is, timeout mechanism.

Route Discovery Framework for Mobile Ad Hoc Networks 651
Waiting for events
Receivingan RREQ
Estimate PI, rebroadcast delay;buffer RREQ;
set a rebroadcast event
Rebroadcast eventtriggered
New?Yes No
nh = 1nh = 0?
No
nh + +Yes
DeleteRREQ
nh = 0 or nh > n0?Yes No
Delete RREQfrom buffer
Updated RREQ
RebroadcastRREQ
nh = 0
Figure 3: The competing procedure of PRDS.
In PRDS, there are two kinds of events: receiving anRREQ event, which is triggered when a node receives anRREQ; and a rebroadcast delay time out event, whichis triggered when a rebroadcast delay expires. When anode receives a new RREQ, it assesses itself on howwell it can deal with the next hop of the constructingroute by using a priority index (PI). PI is defined by somenode/link/network state parameters provided by VDIM ac-cording to different route design purposes such as shortestpath, long lifetime path, stable path, load/energy-aware path,and so forth. For convenience, we restrict the value of PIwithin [0, 1]. In the following, we will give some examplesof PI for various route strategies.
When the PI has been estimated, the RREQ rebroadcastdelay (d) is then calculated according to PI. The higher thePI is, the smaller d will be. The node schedules a rebroad-cast event that will be triggered when the rebroadcast delayexpires.
We preset a threshold (n0) for the duplicate number ofRREQ. When a rebroadcast delay times out, PRDS com-pares the RREQ duplicate number (nh) with the thresh-old (n0). The node will rebroadcast the RREQ if nh ≤ n0.Otherwise, the rebroadcast operation will be cancelled. Wedenote PRDS using different n0 as PRDS /n0, for example,PRDS /1, PRDS /2, and so forth. The sequence of operationsfor PRDS is shown in Figure 3. Note that only those nodesthat win the rebroadcast competition need to rebroadcast theRREQ.
As an example to demonstrate its operation, we applyPRDS /1 to the topology in Figure 1. Setting n0 = 1 meansthat a node will be prohibited from rebroadcasting if it hasreceived more than one copy of the RREQ when the rebroad-cast delay expires. We simply take DIS /R as PI (thus this is
the shortest path routing strategy), where DIS is the distancebetween the sender and receiver; R is the transmission range.In Figure 1, node S broadcasts an RREQ that is destined fornode D. Node A, C, and G receive the RREQ and competefor rebroadcast. Node A has the highest rebroadcast prior-ity since link S–A has the longest length. Node A wins thecompetition and rebroadcasts the RREQ first. Nodes G andC receive the second copy of the RREQ and thus are prohib-ited from rebroadcasting. Similarly, node B will rebroadcastthe RREQ; nodes E and H are prohibited from rebroadcast-ing. Note that nodes F and I will rebroadcast the RREQ be-cause they only receive one copy of the RREQ from node B(the destination D will not rebroadcast the RREQ). In thisexample, node S initiates an RREQ; nodes A, B, F, and Irebroadcast it in turn; other nodes, that is, C, E, G, and Hare prohibited from rebroadcasting. That is, 4/8 of the re-broadcasts are eliminated and the shortest path S–A–B–D isselected.
3.3. Definition of PI and the rebroadcast delay
As we can see from the above, there are two important pa-rameters in the system: the priority index (PI) and the re-broadcast delay (d).
PI is used to indicate how good the node is for the nexthop of the constructing route. A large PI implies that theRREQ will go fast in the rebroadcast competition. The defi-nition of PI should satisfy
(a) PI ∈ [0, 1];(b) a larger PI represents the higher priority of a node to
rebroadcast the RREQ.
One can define a PI in many ways with respect to therouting requirements as long as the definition is in line withthe above requirements.
To find a desirable route is usually a combinatorial opti-mization problem which is often a NP-problem, for example,the least delay and power efficient route with enough band-width. It needs global information to construct such routes,which is difficult to maintain in a distributed dynamic net-work. In PRDS, we propose to couple multiple requirementsinto a single parameter—PI.
We assume that there are k constraints for a route, namelyα1,α2, . . . ,αk. We then design k functions fα j for each αj ,where j = 1, 2, . . . , k, and fα j ∈ [0, 1]. The larger fα j meansthe relevant requirement is more satisfied. We term the func-tion fα j the contribution function. Examples of defining acontribution function can be found in Section 4. The follow-ing two functions are suggested for PI estimation:
PI =k∏j=1
fα j (1)
or
PI =k∑j=1
cj fα j , (2)

652 EURASIP Journal on Wireless Communications and Networking
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
PI
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tan
h((
1−
PI)/u
0)
u0 = 1.0
u0 = 0.6u0 = 0.3 u0 = 0.1
Figure 4: Function tanh((1− PI)/u0).
where cj ≥ 0, j = 1, . . . , k, and
k∑j=1
cj = 1. (3)
In (2), the contribution of fα j to PI is weighted by cj . It isobvious that both (1) and (2) satisfy the requirements for PI.
The next important parameter is the rebroadcast delay d.d should be defined as a bounded decrease function: d de-creases as PI increases.
We provide two schemes to define d. In the first scheme,we divide the value range of the PI into M parts:
0 = PI(0) < PI(1) < PI(2) < · · · < PI(M) = 1. (4)
The value of M is decided based on the control granular-ity. The typical value is 3 or 4.
The rebroadcast delay d is then defined as
d = ((M − j) + random(·))∗δ (5)
for PI ∈ [PI( j), PI( j + 1)), where δ is a pre-assigned smalldelay, for example, 5 milliseconds; random(·) is a randomfunction uniformly distributed from 0 to 1.
In the second scheme, we define d as
d = dmax∗( f (PI) + 0.1∗random(·)), (6)
where dmax is the upper bound of d; random(·) is the same asthe one in (5). This term is used to differentiate rebroadcastdelay when nodes have same PI value. f (·) is a function of PIthat should satisfy the following requirements: (i) a boundedfunction with upper bound ≤ 1 and lower bound ≥ 0; (ii)f (·) decreases as PI increases. We define the function f (·) asfollows:
f (PI) = tanh(
1.0− PIu0
), (7)
where tanh(x) is a hyperbolic tangent function; u0 is a con-stant, and the value of 0.3 is appropriate for most cases(see Figure 4). f (PI) ∈ [0, 0.998] when PI ∈ [0, 1]. f (PI)decreases rapidly when PI approaches 1 so as to differentiaterebroadcast delay efficiently between high priority nodes.
3.4. Cross-layer parameters and routing strategies
Generally, each layer has its own state parameters that can beprovided to other layers. As we focus on routing strategies,we only discuss routing relevant parameters in this paper.
(i) Application layer: application requirements such asdelay, bandwidth, packet loss, and user priority could be usedin the route construction.
(ii) TCP layer: TCP throughput and packet loss informa-tion could be exploited by the routing protocol.
(iii) Link/MAC/physical layer: link states (such as linklifetime, link bandwidth, and link stability), channel states(such as bit error rate, signal strength, and channel uti-lization), location information (such as coordinates, neigh-bour distribution, and mobility parameters), energy level,and transmission power could be used by the routing pro-tocol to calculate PI.
(iv) Network layer: the routing protocol uses the param-eters from upper/lower layers to construct desirable routes.Upper layers usually provide resource requirement informa-tion while lower layers provide resource availability informa-tion.
Based on the availability of the above cross-layer param-eters, the following routing metrics are examples that couldbe used in CRDF.
Link lifetime and route lifetime
Based on the availability of the relevant parameters, link life-time can be predicted either by the position/mobility infor-mation or by the signal strength and its temporal variationinformation. Route lifetime is the minimum link lifetimeamongst the links along the route.
Route length
This is the number of hops of a route.
Delay
Average delay to send a packet on a link could be measured inthe MAC layer. The end-to-end delay is the addition of eachlink delay along the route. The average medium access delaycan also represent the medium state of how busy the channelis.
Bandwidth
The used bandwidth and the available bandwidth are impor-tant for applications with QoS requirements.
Node lifetime
This metric is based on the energy capacity of a node and theenergy dissipation rate.

Route Discovery Framework for Mobile Ad Hoc Networks 653
Energy level or energy capacity
This metric can be used in energy aware routing.
Location
Position, that is, the coordinate of a node, and mobility in-formation, that is, the speed and direction, can be used inlocation-based routing.
Power
This is the power needed for a transceiver to transmit dataover a link at different radio rate. This metric is desirable forpower efficient routing.
Cost
The cost could be defined by a single metric or a combinationof several metrics, for example, energy consumption, price,and the combination of delay and energy consumption.
A contribution function can be defined for each or acombination of the above metrics to characterize a specificrouting strategy, for example, shortest path routing, least de-lay routing, and energy aware routing. By combining the spe-cific routing strategies, one can “compose” flexible routingstrategies, for example, long life least delay routing, energyefficient shortest path routing, and so forth.
3.5. Routing strategy automation
The continuous proliferation of wireless networks has trig-gered a plethora of research into how to provide quality ofservice (QoS) for different applications, for example, require-ments regarding bandwidth, delay, jitter, packet loss, and re-liability. Existing routing protocols usually employ a singlerouting strategy throughout the network for all types of ap-plications. This can lead to inefficient use of the scarce re-sources with a resultant negative impact on the lifetime ofthe nodes in the network. CRDF enables the routing strategyautomation to solve this problem, where each source nodeautomatically constructs the appropriate routing strategy fordifferent applications and each intermediate node furtheradapts the routing strategy.
In CRDF, when an application requests a new route,PRDS can obtain the application requirements from theVDIM. After that, PRDS decides the appropriate routingstrategy for the application, for example, QoS routing strate-gies for real-time applications (such as VoIP and video con-ferencing) and least cost routing strategy for best-effortapplications (such as FTP and email). The source nodeconstructs the route request (RREQ) and broadcasts to itsneighbours.
When an intermediate node receives an RREQ, it fur-ther adapts the routing strategy according to the availableresources. For example, a node with low energy level mayjust simply ignore an RREQ or it may adjust the PI to a verysmall value if the RREQ represents a best-effort requirement.A MANET may include diversity mobile nodes which dif-fer in energy capacity, computing power, memory capacity,physical size, and wireless interface type. When the routing
strategy is further adapted by considering these factors, theoverall network resources will be more reasonably allocatedto different types of applications.
4. PRDS-MR
In this section, we demonstrate the effectiveness and effi-ciency of CRDF by designing a macrobian routing protocolusing PRDS inside the CRDF. We term it PRDS-MR. We as-sume that (i) each node gets its own location and mobilityknowledge from some positioning system via the VDIM; (ii)each node is equipped with an omni-directional transceiverthat has a transmission range R. PRDS-MR aims at findingthe route that has the following features in comparison withRD-random: the lifetime of the route is relatively long; theroute length (hops) is not significantly long; routing over-head is minimised. What we need to do is just to define eachcontribution function and PI.
We first define two parameters: link alive time (LAT),route alive time (RAT), and the distance of a link (DIS). LATis the amount of time during which two nodes remain con-nected. RAT is the minimum LAT of the links along the routefrom source to destination.
We denote the coordinates and moving speed of node i as(xi, yi, zi) and (ui, vi,wi), respectively. The distance betweennode 1 and node 2 can then be expressed as
DIS =√x2d + y2
d + z2d, (8)
where xd = x1 − x2, yd = y1 − y2, zd = z1 − z2.A link exits between node 1 and node 2 if DIS ≤ R, that is,
node 1 and node 2 can communicate with each other directly.The LAT of the link can be estimated as follows:
LAT = −(xdud + ydvd + zdwd)
+√A− B
u2d + v2
d + w2d
, (9)
where
A = (u2d + v2
d + w2d
)R2,
B = (ud yd − vdxd)2
+(vdzd −wdyd
)2+(udzd −wdxd
)2,
ud = u1 − u2, vd = v1 − v2, wd = w1 −w2.(10)
Now, we define contribution functions for the LAT, DIS,and RAT to meet the route requirements:
fLAT = tanh(
LAT / LAT0
C1
),
fDIS = tanh(
DIS /RC2
),
fRAT = tanh(
RAT / RAT0
C3
).
(11)

654 EURASIP Journal on Wireless Communications and Networking
(60, 50, 0.9)0.96
(99, 50, 0.1)0.53
A
B
J
(50,
50, 0.8
)0.
93
S (60, 60, 0.8)0.96 K
(9, 9, 0.6)0.29 L
M
G
(60, 60, 0.8)
0.96
(40, 40, 0.5)0.87F
(20, 0.5, 0.6)0.44
(0.5, 0.5, 0.9)
0.013
(50, 50, 0.8)0.93
C(90, 50, 0.7)0.99
D
(30,
30, 0.6
)0.
76
I(50, 40, 0.5)
0.92H
N
E
X
X
Node that rebroadcasts RREQ
Node that was prohibited from rebroadcasting
(LAT, RAT, DIS/R)
PI(LAT, RAT, DIS/R)
PI(LAT, RAT, DIS/R)
PI(LAT, RAT, DIS/R)
PI
Link
Link of route one
Link of route two
Link of unsuccessful route
Figure 5: A route discovery scenario using PRDS/1-MR.
We choose (1) to define PI, that is,
PI = fLAT · fDIS · fRAT, (12)
where fLAT is the contribution of the LAT of the upstreamlink. It is the main part of PI. It guarantees that the link witha larger LAT has a higher PI. fDIS is the contribution of thephysical length of the upstream link. fRAT is the contributionof lifetime of the path from source to the current node. C1,C2, C3, LAT0, and RAT0 are parameters whose values are cho-sen with respect to the routing requirements. By adjustingtheir values, we can change the relative contribution of eachterm in (12) to the PI. According to the purpose of PRDS-MR described at the beginning of this section, fLAT shouldplay the main part in PI; fDIS prevents very short links frombeing included in the route; and fRAT prevents short lifetimeroutes from being selected. We choose the following param-eters to meet these route selection criteria:
C1 = 0.30; C2 = 0.17; C3 = 0.05;
LAT0 = 100 seconds; RAT0 = 10 seconds.(13)
Figure 5 illustrates a route discovery example usingPRDS-MR. n0 is set to 1 in this scenario. Node S broadcastsan RREQ to discover a route to node D. The numbers above
a link are (LAT, RAT, DIS /R); the number under a link is thePI for the receiving node to compete for the RREQ rebroad-cast. For example, numbers (60,50,0.9) above the link A–Bmean that LAT of link A–B is 60 seconds; RAT of route S–A–B is 50 seconds; length of link A–B is 0.9R. The number0.96 under link A–B means that the PI for node B allows thelatter to compete for the RREQ rebroadcast. In the figure,node J is prohibited from broadcasting because link A-J isvery short (so pDIS is very small). Node F is prohibited fromrebroadcasting because the RAT of path S–E–F is very short(so pRAT is very small). In this example, two paths are discov-ered; path S–A–B–C–D is the first arrival that is then selected(RAT = 50 seconds); five nodes are prohibited from rebroad-casting.
We use (6) and (7) to estimate the rebroadcast delay.
5. SIMULATION RESULTS
To evaluate the performance of PRDS-MR, we have im-plemented PRDS-MR based on AODV. In this section, weconduct simulations in the global mobile simulation (Glo-MoSim) developing library [52]. We evaluate the perfor-mance of PRDS-MR by comparison with AODV. In thesimulations, IEEE 802.11 distributed coordination function(DCF) is used as the MAC protocol. The random waypointmodel is used as the mobility model. In this model, a host

Route Discovery Framework for Mobile Ad Hoc Networks 655
Table 1: Simulation parameters for scenario 1.
Number of nodes Area (m2) Simulation time (s) Other parameters
50 1500× 300 500 Communication pairs: 10Communication load:4 packets/source/sMaximum speed: 20 m/sMinimum speed: 0 m/s
100 2200× 600 500200 3500× 900 300500 4500× 1500 300
1000 5500× 2500 300
randomly selects a destination within the terrain range andmoves towards that destination at a speed between the pre-defined minimum and maximum speed. Once the host ar-rives at the destination, it remains in its current position for apause time. After the pause time, it randomly selects anotherdestination and speed and then resumes movement. In oursimulation, the pause time is set to 0 seconds. The bandwidthof the wireless channel is 2 Mbps. The data packet size is 512bytes. The flow pattern is CBR (constant bit rate). The max-imum rebroadcast delay dmax in (1) is set to 30 milliseconds.
The metrics measured in the simulations are as follows.
(i) Packet delivery ratio (PDR): the number of packets re-ceived by all destinations over the number of packetssent by all sources.
(ii) Average end-to-end delay:∑di/Nr , where di is the de-
lay experienced by packet i from source to destination;Nr is the number of packets received by all destina-tions.
(iii) Routing overhead: number of sending times of routingpackets in the simulation.
(iv) Route lifetime: the interval of a route from its creationuntil it is broken.
5.1. Scenario 1: scalability to network sizeProtocol scalability is an important issue in MANETs. Insome applications such as military communications in a tac-tical environment, thousands of mobile nodes may exist.
In this simulation, network size varies from 50 to 1000while keeping node density constant. Table 1 gives the sim-ulation parameters. The purpose of this simulation is todemonstrate the scalability of the protocol, that is, how itperforms against network size.
In the following figures, PRDS /n0-MR denotes simula-tion results of the protocol using PRDS /n0-MR mechanism,where n0 is the threshold of the RREQ duplicate number asdescribed above. n0 = ALL means each node will rebroadcastevery nonduplicated RREQ once.
Figure 6a illustrates the average route lifetime of eachscheme. It shows that route lifetimes of all PRDS /n0-MRschemes are nearly twice as long as AODV. In AODV, RD-random is used in route discoveries; while in PRDS /n0-MR,the long lifetime links have the highest priority. The simu-lation results demonstrate that PRDS /n0-MR mechanism iseffective. Lifetime of the route discovered by PRDS /n0-MRis significantly longer than that of AODV. Within PRDS /n0-MR schemes, PRDS /1-MR and PRDS /2-MR perform betterthan PRDS/ALL-MR.
The performance of PRDS against route length is shownin Figure 6b. The results show that the average route length
of each PRDS /n0-MR scheme is 5%–14% longer than that ofAODV. This is because PRDS /n0-MR schemes aim at findingthe most stable route rather than the shortest route. The mac-robian route tends to include shorter links than AODV andleads to longer paths. Considering the benefit from route life-time, the cost in route length is worthy. PRDS /n0-MR lever-ages the route length and the route lifetime.
Figure 6c shows the same variation tendency of routingoverhead for all routing strategies. That is, routing overheadincreases as network size increases. However it may be seenthat the routing overhead of AODV increases much morerapidly than that of PRDS /n0-MR. The routing overheadof PRDS/ALL-MR, PRDS /1-MR, and PRDS /2-MR is only42%, 11%, and 15% of that of AODV, respectively, when net-work size is 1000. The reasons for low routing overhead forPRDS /n0-MR are (1) macrobian route decreases the num-ber of route discoveries; (2) a large amount of rebroadcastsare avoided in the route discoveries.
IEEE 802.11 DCF uses contending-based channel accessscheme. It does not have any mechanism to reserve the chan-nel for broadcast that is used by RREQ propagation. Thus,signal collisions are unavoidable in a real environment. Weanalyzed collision variance with respect to network size andfound that the variance tendency is very similar to that ofrouting overhead shown in Figure 6c. This implies that sig-nal collisions are highly correlated with routing overhead.
Figure 6d illustrates the packet delivery ratio. As ex-pected, the packet delivery ratio of each scheme decreasesas network size increases. Otherwise, the packet delivery ra-tio of AODV decreases more quickly than that of any ofthe PRDS /n0-MR schemes. The difference between themincreases as network size increases. The delivery ratio ofPRDS /n0-MR is 2%–5% higher than AODV in 50-nodenetwork, while 20%–25% higher in 1000-node network.Among all schemes, PRDS /2-MR performs best; PRDS /1and PRDS/ALL-MR perform similarly; AODV performsworst.
Figure 6e presents the average end-to-end delay of eachscheme. In general, delay of any scheme increases as networksize increases. In small networks (network size is less than100), the delay of AODV is lower than that of PRDS /n0-MR. On the other hand, the delay of AODV increases rapidlyas network size increases and soon exceeds the delay ofPRDS /n0-MR.
5.2. Scenario 2: dynamic adaptation
A MANET has the ability of fast deployment and each nodecan move around freely. One of the main features of aMANET is its dynamic topology that challenges any routing

656 EURASIP Journal on Wireless Communications and Networking
0 200 400 600 800 10000
2
4
6
8
10
12
14
16
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Network size (node number)
Rou
telif
etim
e(s
)
(a)
0 200 400 600 800 10000
2
4
6
8
10
12
14
16
18
20
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Network size (node number)
Rou
tele
ngt
h(h
ops)
(b)
0 200 400 600 800 10000.0
0.2
0.4
0.6
0.8
1.0
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Network size (node number)
Rou
tin
gov
erh
ead:
106
pack
ets
(c)
0 200 400 600 800 1000
50
60
70
80
90
100
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Network size (node number)
Del
iver
yra
tio
(%)
(d)
0 200 400 600 800 10000.00
0.05
0.10
0.15
0.20
0.25
0.30
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Network size (node number)
Del
ay(s
)
(e)
Figure 6: (a) Scalability-route lifetime. (b) Scalability-route length. (c) Scalability-routing overhead. (d) Scalability-packet delivery ratio. (e)Scalability-route lifetime.

Route Discovery Framework for Mobile Ad Hoc Networks 657
0 5 10 15 20 250
10
20
30
40
50
60
70
80
90
100
110
120
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Max-speed (m/s)
Rou
telif
e(s
)
(a)
0 5 10 15 20 254
5
6
7
8
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Max-speed (m/s)
Rou
tele
ngt
h(h
ops)
(b)
0 5 10 15 20 250
1
2
3
4
5
6
7
8
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Max-speed (m/s)
Rou
tin
gov
erh
ead:
104pa
cket
s
(c)
0 5 10 15 20 2580
85
90
95
100
AODVPRDS/ALL-MR
PRDS/1-MRPRDS/2-MR
Max-speed (m/s)
Del
iver
yra
tio
(%)
(d)
Figure 7: (a) Dynamics-route lifetime. (b) Dynamics-route length. (c) Dynamics-routing overhead. (d) Dynamics-packet delivery ratio.
protocol designed for it. This simulation scenario demon-strates the performance differences between AODV and thePRDS-MR schemes on how well they adapt to a dynamicallychanging environment.
In the simulation, network size is 100 nodes; simulationarea is 1500 m × 300 m; simulation time is 500 seconds; thenumber of communication pairs is 10; the packet sendingrate for each communication pair is 4 pkts/s. The mobil-ity model is random waypoint model where the minimumspeed is 0 m/s while the maximum speed varies from 1 m/sto 25 m/s.
Figure 7 gives performance difference between AODVand PRDS/MR schemes. Figure 7a shows that route lifetimeof each PRDS/MR scheme is almost two times as muchas that of AODV in any case. There appears to be no sig-nificant difference in route lifetime between the PRDS/MRschemes. Figure 7b shows that the average route length ofAODV is shorter than that of each PRDS/MR scheme as ex-pected.
Figures 7c and 7d demonstrate that the PRDS/MRschemes utilize bandwidth more efficiently than AODV.Figure 7c shows that when the node speed increases the

658 EURASIP Journal on Wireless Communications and Networking
overhead of AODV increases more rapidly than any of thePRDS/MR schemes.
Figure 7d shows the packet delivery ratio varying withnode moving speed. It is clear that all of the PRDS/MRschemes outperform AODV.
When analyzing end-to-end delay (not shown in the fig-ures), we found that the delay of AODV is smaller than thatof PRDS/MR schemes when mobility is low. However, sinceAODV delay increases more quickly than that of PRDS/MRschemes, it becomes larger when mobility is high.
In addition to the above simulations, we have also con-ducted other simulations such as performance variance un-der various network load and communication pairs. All thesesimulations demonstrate that the PRDS/MR schemes out-perform AODV in terms of packet delivery ratio, end-to-end delay, and route lifetime while they reduce routing over-head significantly and consume much less network band-width and energy. The performance improvement obtainedby the PRDS/MR schemes is an example of the gains fromthe cross-layer design in MANETs.
6. CONCLUSIONS
Current reactive routing protocols in mobile ad hoc networks(MANETS) employ random delays between rebroadcastingroute requests. This has been shown to lead to “next-hopracing” and “rebroadcast redundancy.” In this paper, a cross-layer route discovery framework (CRDF) has been proposedto address these problems. CRDF provides mechanisms toexploit the cross-layer information. In CRDF, a virtual deviceinformation manager (VDIM) provides cross-layer informa-tion; a novel route discovery strategy termed priority-basedroute discovery strategy (PRDS) serves as the kernel engine ofthe framework to utilize the cross-layer information in routediscoveries. PRDS can be used to construct different routingstrategies by defining different priority indices (PI) and hasthe ability to find better quality routes while decreasing rout-ing overhead.
In addition to solving the “next hop racing” and the“rebroadcast redundancy” problems, the proposed frame-work, CRDF, enables routing strategy automation (RoSAuto),wherein the routing strategy is automatically decided by thesource node with respect to the application requirements,and is further adapted by the intermediate nodes accordingto the availability of the local resources. This makes the rout-ing strategy adaptive to the changing environment, and op-timizes the resource usage. According to our best knowledge,this is the first time that an automated routing strategy suchas RoSAuto has been considered for use in MANETs.
To demonstrate the effectiveness and efficiency of theproposed CRDF, we have designed a macrobian routediscovery strategy (PRDS-MR) within the framework. Sim-ulation results show that PRDS-MR outperforms AODV interms of packet delivery ratio and end-to-end delay while re-ducing routing overhead significantly. PRDS-MR has betterscalability than AODV.
PRDS-MR has additional advantages. It is a distributedalgorithm and does not need any periodic messages such as
beacons/hellos and link state exchanges. A macrobian routerequires fewer route reconstructions and hence yields higherthroughput and lower routing overhead. A large amount ofredundant rebroadcasts are saved and therefore bandwidthand energy consumption by routing overhead is reduced,that is, it improves both bandwidth and energy utilization.
Future research directions include collaboration betweenCRDF and existing QoS mechanisms such as InerServ andDiffServ, development of the specific routing strategies suchas energy aware and delay sensitive routing strategies. An-other research direction is to adapt the CRDF to resourceconstraint wireless sensor networks.
ACKNOWLEDGMENT
The authors gratefully acknowledge the support and finan-cial assistance provided by the UK EPSRC, under the ProjectGR/S02105/01 “Programmable Routing Strategies for Mul-tihop Wireless Networks,” as well as the reviewers for theirextensive comments that helped improve the paper.
REFERENCES
[1] R. Sivakumar, P. Sinha, and V. Bharghavan, “CEDAR: a core-extraction distributed Ad-hoc routing algorithm,” IEEE J. Se-lect. Areas Commun., vol. 17, no. 8, pp. 1454–1465, 1999.
[2] S. Chen and K. Nahrstedt, “Distributed quality-of-servicerouting in Ad-hoc networks,” IEEE J. Select. Areas Commun.,vol. 17, no. 8, pp. 1488–1505, 1999.
[3] J. Li and P. Mohapatra, “A novel mechanism for floodingbased route discovery in Ad-hoc networks,” in Proc. IEEEGlobal Telecommunications Conference (GLOBECOM ’03),vol. 2, pp. 692–696, San Francisco, Calif, USA, December2003.
[4] Y.-B. Ko and N. H. Vaidya, “Location-aided routing (LAR) inmobile ad hoc networks,” in Proc. 4th Annual ACM/IEEE In-ternational Conference on Mobile Computing and Networking(MobiCom ’98), pp. 66–75, Dallas, Tex, USA, October 1998.
[5] M. Joa-Ng and I.-T. Lu, “A peer-to-peer zone-based two-levellink state routing for mobile Ad-hoc networks,” IEEE J. Select.Areas Commun., vol. 17, no. 8, pp. 1415–1425, 1999, SpecialIssue on ad-hoc networks.
[6] Z. J. Haas, “A new routing protocol for the reconfigurablewireless networks,” in Proc. 6th IEEE International Conferenceon Universal Person Communications (ICUPC ’97), vol. 2, pp.562–566, San Diego, Calif, USA, October 1997.
[7] C. E. Perkins and E. M. Royer, “Ad-hoc on-demand distancevector routing,” in Proc. 2nd IEEE Workshop on Mobile Com-puting Systems and Applications (WMCSA ’99), pp. 90–100,New Orleans, La, USA, February 1999.
[8] D. B. Johnson and D. A. Maltz, “Dynamic source routing inAd-hoc wireless networks,” in Mobile Computing, T. Imielin-ski and H. Korth, Eds., chapter 5, pp. 153–181, Kluwer Aca-demic, Norwell, Mass, USA, 1996.
[9] S.-Y. Ni, Y.-C. Tseng, Y.-S. Chen, and J.-P. Sheu, “The broad-cast storm problem in a mobile Ad-hoc network,” in Proc. 5thAnnual ACM/IEEE International Conference on Mobile Com-puting and Networking (MobiCom ’99), pp. 151–162, Seattle,Wash, USA, August 1999.
[10] B. Zhou, J. Wu, F. Xiang, and J. Zhao, “PCBA: a priority-basedcompetitive broadcasting algorithm in mobile Ad-hoc net-works,” Journal of Computer Science and Technology, vol. 18,no. 5, pp. 598–606, 2003.

Route Discovery Framework for Mobile Ad Hoc Networks 659
[11] I. Katzela and M. Naghshineh, “Routing with load balanc-ing in wireless Ad-hoc networks,” in Proc. 4th ACM Interna-tional Workshop on Modeling, Analysis and Simulation of Wire-less and Mobile Systems (MSWiM ’01), pp. 89–96, Rome, Italy,July 2001.
[12] S.-J. Lee and M. Gerla, “Dynamic load-aware routing in adhoc networks,” in Proc. IEEE International Conference on Com-munications (ICC ’01), vol. 10, pp. 3206–3210, Helsinki, Fin-land, June 2001.
[13] R. Dube, C. D. Rais, K.-Y. Wang, and S. K. Tripathi, “Signalstability-based adaptive routing (SSA) for ad hoc mobile net-works,” IEEE Pers. Commun., vol. 4, no. 1, pp. 36–45, 1997.
[14] C.-K. Toh, “Associativity-based routing for ad-hoc mobilenetworks,” Wireless Personal Communications, vol. 4, no. 2, pp.103–139, 1997, Special Issue on mobile networking and com-puting systems.
[15] J. Li and P. Mohapatra, “LAKER: location aided knowledgeextraction routing for mobile ad hoc networks,” in Proc. IEEEWireless Communications and Networking Conference (WCNC’03), vol. 2, pp. 1180–1184, New Orleans, La, USA, March2003.
[16] G. Bianchi, A. T. Campbell, and R. R.-F. Liao, “On utility-fairadaptive services in wireless networks,” in Proc. 6th Interna-tional Workshop on Quality of Service (IWQoS ’98), pp. 256–267, Napa, Calif, USA, May 1998.
[17] V. Bharghavan, K.-W. Lee, S. Lu, S. Ha, J.-R. Li, and D. Dwyer,“The TIMELY adaptive resource management architecture,”IEEE Pers. Commun., vol. 5, no. 4, pp. 20–31, 1998.
[18] S.-B. Lee, G.-S. Ahn, X. Zhang, and A. T. Campbell, “IN-SIGNIA: an IP-based quality of service framework for mobilead hoc networks,” Journal of Parallel and Distributed Comput-ing, vol. 60, no. 4, pp. 374–406, 2000, Special Issue on wirelessand mobile computing and communications.
[19] M. Mirhakkak, N. Schult, and D. Thomson, “Dynamic band-width management and adaptive applications for a variablebandwidth wireless environment,” IEEE J. Select. Areas Com-mun., vol. 19, no. 10, pp. 1984–1997, 2001.
[20] G.-S. Ahn, A. T. Campbell, A. Veres, and L.-H. Sun, “SWAN:service differentiation in stateless wireless ad hoc networks,”in Proc. 21st Annual Joint Conference of the IEEE Computer andCommunications Societies (INFOCOM ’02), vol. 2, pp. 457–466, New York, NY, USA, June 2002.
[21] S. H. Shah, K. Chen, and K. Nahrstedt, “Dynamic bandwidthmanagement in single-hop ad hoc wireless networks,” MobileNetworks and Applications, vol. 10, no. 1-2, pp. 199–217, 2005,Special Issue on algorithmic solutions for wireless, mobile, ad-hoc and sensor networks.
[22] V. T. Raisinghani and S. Iyer, “Cross-layer design optimiza-tions in wireless protocol stacks,” Computer Communications,vol. 27, no. 8, pp. 720–724, 2004.
[23] G. Xylomenos and G. C. Polyzos, “Internet protocol per-formance over networks with wireless links,” IEEE Network,vol. 13, no. 4, pp. 55–63, 1999.
[24] D. D. Clark and D. L. Tennenhouse, “Architectural con-siderations for a new generation of protocols,” in Proc.ACM Symposium on Communications, Architectures andProtocols (SIGCOMM ’90), pp. 200–208, Philadelphia, Pa,USA, September 1990.
[25] D. D. Clark, “The structuring of systems using upcalls,” inProc. 10th ACM Symposium on Operating Systems Principles(SOSP ’85), pp. 171–180, Orcas Island, Wash, USA, Decem-ber 1985.
[26] K. Chen, S. H. Shah, and K. Nahrstedt, “Cross-layer designfor data accessibility in mobile ad hoc networks,” Wireless Per-sonal Communications, vol. 21, no. 1, pp. 49–76, 2002.
[27] K. Nahrstedt, S. H. Shah, and K. Chen, “Cross-layer archi-tectures for bandwidth management in wireless networks,”in Resource Management in Wireless Networking, M. Cardei,I. Cardei, and D.-Z. Du, Eds., Springer, New York, NY, USA,2005.
[28] T. A. ElBatt, S. V. Krishnamurthy, D. Connors, and S. Dao,“Power management for throughput enhancement in wirelessad-hoc networks,” in Proc. IEEE International Conference onCommunications (ICC ’00), vol. 3, pp. 1506–1513, New Or-leans, La, USA, June 2000.
[29] H. Balakrishnan, V. N. Padmanabhan, S. Seshan, and R. H.Katz, “A comparison of mechanisms for improving TCP per-formance over wireless links,” IEEE/ACM Trans. Networking,vol. 5, no. 6, pp. 756–769, 1997.
[30] Y. Yang, H. Zhang, and R. Kravets, “Channel quality basedadaptation of TCP with loss discrimination,” in Proc. IEEEGlobal Telecommunications Conference (GLOBECOM ’02),vol. 2, pp. 2026–2030, Taipei, Taiwan, November 2002.
[31] P. Bhagwat, P. Bhattacharya, A. Krishna, and S. K. Tripathi,“Using channel state dependent packet scheduling to im-prove TCP throughput over wireless LANs,” Wireless Net-works, vol. 3, no. 1, pp. 91–102, 1997.
[32] V. Raghunathan, S. Ganeriwal, C. Schurgers, and M. B. Sri-vastava, “Energy efficient wireless packet scheduling and fairqueuing,” ACM Transactions on Embedded Computing Sys-tems, vol. 3, no. 1, pp. 431–447, 2004.
[33] P. Ramanathan and P. Agrawal, “Adapting packet fair queue-ing algorithms to wireless networks,” in Proc. 4th AnnualACM/IEEE International Conference on Mobile Computing andNetworking (MobiCom ’98), pp. 1–9, Dallas, Tex, USA, Octo-ber 1998.
[34] K. Wu and J. Harms, “Load-sensitive routing for mobile adhoc networks,” in Proc. 10th International Conference on Com-puter Communications and Networks (ICCCN ’01), pp. 540–546, Scottsdale, Ariz, USA, October 2001.
[35] V. Rodoplu and T. H. Meng, “Minimum energy mobile wire-less networks,” IEEE J. Select. Areas Commun., vol. 17, no. 8,pp. 1333–1344, 1999.
[36] S. Singh, M. Woo, and C. S. Raghavendra, “Power-awarerouting in mobile ad hoc networks,” in Proc. 4th AnnualACM/IEEE International Conference on Mobile Computing andNetworking (MobiCom ’98), pp. 181–190, Dallas, Tex, USA,October 1998.
[37] M. W. Subbarao, “Dynamic power-conscious routing forMANETs: an initial approach,” in Proc. 50th IEEE VehicularTechnology Conference (VTC ’99), vol. 2, pp. 1232–1237, Am-sterdam, The Netherlands, Septemper 1999.
[38] T. J. Kwon and M. Gerla, “Clustering with power control,”in Proc. IEEE Military Communications Conference (MILCOM’99), vol. 2, pp. 1424–1428, Atlantic City, NJ, USA, October–November 1999.
[39] J. E. Wieselthier, G. D. Nguyen, and A. Ephremides, “On theconstruction of energy-efficient broadcast and multicast treesin wireless networks,” in Proc. 19th Annual Joint Conference ofthe IEEE Computer and Communications Societies (INFOCOM’00), vol. 2, pp. 585–594, Tel Aviv, Israel, March 2000.
[40] J.-H. Chang and L. Tassiulas, “Energy conserving routing inwireless ad-hoc networks,” in Proc. 19th Annual Joint Con-ference of the IEEE Computer and Communications Societies(INFOCOM ’00), vol. 1, pp. 22–31, Tel Aviv, Israel, March2000.
[41] J. Gomez, A. T. Campbell, M. Naghshineh, and C. Bisdikian,“PARO: supporting dynamic power controlled routing inwireless ad hoc networks,” Wireless Networks, vol. 9, no. 5, pp.443–460, 2003.

660 EURASIP Journal on Wireless Communications and Networking
[42] W. R. Heinzelman, A. Chandrakasan, and H. Balakrishnan,“Energy efficient rouing protocols for wireless microsensorsnetworks,” in Proc. 33rd Hawaii International Conference onSystem and Sciences (HICSS ’00), Maui, Hawaii, USA, January2000.
[43] S. H. Shah and K. Nahrstedt, “Predictive location-based QoSrouting in mobile ad hoc networks,” in Proc. IEEE Interna-tional Conference on Communications (ICC ’02), vol. 2, pp.1022–1027, New York, NY, USA, April–May 2002.
[44] S. Basagni, I. Chlamtac, V. R. Syrotiuk, and B. A. Woodward,“A distance routing effect algorithm for mobility (DREAM),”in Proc. 4th Annual ACM/IEEE International Conference onMobile Computing and Networking (MobiCom ’98), pp. 76–84,Dallas, Tex, USA, October 1998.
[45] W. Su, S.-J. Lee, and M. Gerla, “Mobility prediction in wire-less networks,” in Proc. 21st IEEE Century Military Communi-cations (MILCOM ’00), vol. 1, pp. 491–495, Los Angeles, Claif,USA, October 2000.
[46] R. Castaneda and S. R. Das, “Query localization techniquesfor on-demand routing protocols in Ad-hoc networks,” inProc. 5th Annual ACM/IEEE International Conference on Mo-bile Computing and Networking (MobiCom ’99), pp. 186–194,Seattle, Wash, USA, August 1999.
[47] N. Kothari, V. Bhandari, and D. Sanghi, “Query localiza-tion using pheromone trails: A swarm intelligence based ap-proach,” in Proc. 9th National Conference on Communications(NCC ’03), Chennai, India, January–February 2003.
[48] T. Clausen and P. Jacquet, “Optimized Link State Routing Pro-tocol (OLSR),” IETF RFC 3626, 2003.
[49] M. Jiang, J. Li, and Y. C. Yay, “Cluster based routing pro-tocol (CBRP),” Internet-Draft, http://www.comp.nus.edu.sg/∼tayyc/cbrp/draft-ietf-manet-cbrp-spec-01.txt, August 1999.
[50] J. Wu, M. Gao, and I. Stojmenovic, “On calculating power-aware connected dominating sets for efficient routing in adhoc wireless networks,” in Proc. 30th International Conferenceon Parallel Processing (ICPP ’01), pp. 346–354, Valencia, Spain,September 2001.
[51] B. Zhou, A. Marshall, J. Wu, T.-H. Lee, and J. Liu, “PRDS:A priority based route discovery strategy for mobile ad hocnetworks,” in Proc. 11th IEEE International Conference onTelecommunications (ICT ’04), pp. 410–416, Fortaleza, Brazil,August 2004.
[52] L. Bajaj, M. Takai, R. Ahuja, K. Tang, R. Bagrodia, and M.Gerla, “GloMoSim: A scalable network simulation environ-ment,” Tech. Rep. 990027, UCLA Computer Science Depart-ment, Los Angeles, Calif, USA, May 1999.
[53] B. Das and V. Bharghavan, “Routing in ad-hoc networks us-ing minimum connected dominating sets,” in Proc. IEEE In-ternational Conference on Communications (ICC ’97), vol. 1,pp. 376–380, Montreal, Quebec, Canada, June 1997, Towardsthe Knowledge Millennium.
Bosheng Zhou received his B.S. and M.S.degrees from Nanjing University, China in1986 and 1989, respectively; and his Ph.D.degree in electrical engineering from South-east University, China, in 2003. He has beena Research Fellow at Queen’s University ofBelfast since 2003. His research interests in-clude wireless networks, sensor networks,mesh networks, and smart networks.
Alan Marshall is Professor of telecommu-nications engineering at the Queen’s Uni-versity of Belfast, where he is Director ofthe Advanced Networks Group. He is a Se-nior Member of IEEE, and has spent over20 years working in the tele- and computercommunications industry and in academia.Since 1993 he has been a Lecturer, SeniorLecturer, and Professor, respectively. From1988 to 1990 he was employed by the Admi-ralty Research Establishment, UK, where he worked on the devel-opment of real-time communications networks for surface vessels.Between 1990 and 1993 he was employed as a Senior Systems Engi-neer with Northern Telecom, UK, where he worked on 2nd genera-tion cellular (GSM), and high-speed transmission (SDH) products.He holds joint patents and applications in the areas of spread spec-trum communications, packet scheduling, and wireless networkarchitectures. His research interests include network architecturesand protocols: high-speed computer and telecommunications net-works; mobile and wireless networks; switching; quality of service(QoS) architectures; and network management systems and archi-tectures.
Jieyi Wu is a Professor and Ph.D. Super-visor at the Research Center of ComputerIntegrated Manufactural System (CIMS),Southeast University, China. He received hisB.S. in automation control from SoutheastUniversity, China, in 1963. His research in-terests include CIMS and wired and wirelessnetworking.
Tsung-Han Lee received the B.S. degree inelectrical engineering from National TaipeiUniversity of Technology, Taipei, Taiwan,China, in 1995, and the M.S. degree inTelecommunication engineering from theDepartment of Electrical and ElectronicEngineering, Queen’s University of Belfast,UK, in 2003. Currently, he is working to-ward the Ph.D. degree in the Departmentof Electrical and Electronic Engineering,Queen’s University of Belfast, UK. His current research interests in-clude ad hoc wireless network protocol design, energy-conservingalgorithm for ad hoc network, and QoS enhancement in IEEE802.11 wireless LANs.
Jiakang Liu is a Professor at Beijing Instituteof Technology in telecommunication net-works. His research interests lie in the fieldof communication networks, especially QoSrouting, traffic modeling, and voice overwireless links. He received his B.S. and Ph.D.degrees in electronics engineering from Bei-jing Institute of Technology, China, in 1985and 1991, respectively. From 1996 to 1997he was a Visiting Scholar in the Data Com-munication Institute at University of Siegen, Germany. From 2003to 2004 he was a Visiting Senior Research Fellow in Telecommuni-cation Group at Queen’s University of Belfast.

EURASIP Journal on Wireless Communications and Networking 2005:5, 661–671c© 2005 H. Sun and H. D. Hughes
Adaptive QoS Routing by Cross-LayerCooperation in Ad Hoc Networks
Hongxia SunDepartment of Computer Science, University of Calgary, Calgary, AB, Canada T2N 1N4Email: [email protected]
Herman D. HughesComputer Science and Engineering Department, Michigan State University, East Lansing, MI 48824-1027, USAEmail: [email protected]
Received 30 June 2004; Revised 8 April 2005
QoS provisioning is a complex and challenging issue in mobile ad hoc networks, especially when there are multiple QoS con-straints. In this paper, we propose an adaptive QoS routing scheme supported by cross-layer cooperation in ad hoc networks.The cross-layer mechanism provides up-to-date local QoS information for the adaptive routing algorithm, by considering theimpacts of node mobility and lower-layer link performance. The multiple QoS requirements are satisfied by adaptively using for-ward error correction and multipath routing mechanisms, based on the current network status. The complete routing mechanismincludes three parts: (1) a modified dynamic source routing algorithm that handles route discovery and the collection of QoS-related parameters; (2) a local statistical computation and link monitoring function located in each node; and (3) an integrateddecision-making system to calculate the number of routing paths, coding parity length, and traffic distribution rates. Simulationresults are presented to illustrate the overall performance of our scheme. Our results indicate that our adaptive routing schemeprovides suitable QoS performance that is less sensitive to network conditions (i.e., node mobility, transmission power, channelcharacteristics, and the traffic pattern) than a nonadaptive routing strategy.
Keywords and phrases: QoS routing, ad hoc network, multiple path, end-to-end delay, packet loss.
1. INTRODUCTION
A wireless ad hoc network consists of a collection of mobilenodes interconnected by multihop wireless paths with wire-less transmitters and receivers. Such networks can be spon-taneously created and operated in a self-organized manner,because they do not rely upon any preexisting network in-frastructure.
There are numerous applications (e.g., military, rescue)for this type of network. The emergence of multimedia appli-cations in communications has generated the need to providequality-of-service (QoS) support in mobile ad hoc networks,and such applications require a stable path to guarantee QoSrequirements. However, the topology of ad hoc networks ishighly dynamic due to the unpredictable node mobility. Inaddition, wireless channel bandwidth is limited. So, QoS pro-visioning in such networks is complex and challenging.
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
There are many routing algorithms proposed for wire-less ad hoc networks; a good survey is provided in [1]. Priorwork on ad hoc network routing can be categorized based onhow the state information is maintained and how the searchfor feasible paths is carried out. General approaches includesource routing [2], distributed routing [3], and hierarchicalrouting [4]. There are some hybrid methods [5, 6] reportedin the literature, and these schemes have been shown to en-hance network performance.
QoS routing usually involves two tasks: collecting andmaintaining up-to-date state information about the networkand finding feasible paths for a connection based on its QoSrequirements. There are currently several main approachesfor QoS routing in ad hoc networks. These approaches canbe classified as network level only and combined network-data-link level [7]. An example of a network-level-only ap-proach is given in [3]. However, it may suffer from severalpotential problems. For example, while the path is being dis-covered, only the link bandwidth between neighboring nodesis considered. Because transmissions between neighboringnodes also affect other nodes in ad hoc networks, neglecting

662 EURASIP Journal on Wireless Communications and Networking
the physical properties of the transmission channel can leadto problems such as possible failure at high data loads. Thenetwork-data-link level approach is more promising becauseit combines information from both the network and data-link layer [7, 8]. However, due to dynamic changes in net-work topology and the difficulties in predicting link states,indirect or estimation approaches are often used (e.g., us-ing signal strength and link lifetime as routing parameters[9]). The obvious problem with such approaches is that theimpacts on QoS performance are hard to quantify, sincethe cross-layer behaviors of mobile networks are not con-sidered. Therefore, most of the proposed routing schemesfor mobile networks are only QoS aware, but do not guar-antee QoS. To address this problem, appropriate cross-layercooperation is required. We propose an adaptive scheme toprovide QoS information by factoring the impacts of nodemobility and lower-layer link parameters into QoS perfor-mance.
There are many proposals for QoS routing in the liter-ature [7, 10, 11]. Most approaches tend to focus on onlyone QoS parameter (e.g., packet loss, end-to-end delay, andbandwidth). For example, while many of the QoS-relatedschemes are successful in reducing packet loss by adding re-dundancy in the packet [12, 13, 14], they do this at the ex-pense of end-to-end delay. Because packet loss and end-to-end delay are inversely related, it may not be possible to finda path that simultaneously satisfies the delay, packet loss, andbandwidth constraints. Some proposed QoS routing algo-rithms [15, 16, 17] do consider multiple metrics, but with-out considering cross-layer cooperation. Multipath routingis another type of QoS routing that has received much atten-tion, since it can provide load balancing, fault tolerance, andhigher aggregate bandwidth [12, 18, 19]. Although this ap-proach decreases packet loss and end-to-end delay, it is onlyefficient and reliable if a relationship can be found betweenthe number of paths and QoS constraints.
In this paper, we propose a cross-layer cooperation mech-anism to support adaptive multipath routing with multipleQoS constraints in an ad hoc network. The cross-layer mech-anism provides information on link performance for the QoSrouting. It treats traffic distribution, wireless link character-istics, and node mobility in an integrated fashion. That is,it reflects the impacts of lower-layer parameters on QoS per-formance in higher layers, with emphasis on translating theseparameters into QoS parameters for the higher-layer connec-tions. A multiobjective optimization algorithm is used to cal-culate routing parameters using the cross-layer mechanism.These parameters are adapted to the current network status,determining the number of routing paths and code paritylengths for FEC. In addition, a traffic engineering strategy isused to evenly distribute traffic over multiple paths.
The remainder of the paper is organized as follows.Section 2 provides an overview of our cross-layer routing ar-chitecture. Three functions (the routing, the local statisticcomputation, and the integrated decision-making functions)in the routing mechanism are introduced in Section 3. Thelayered network models used to support the implementationof these functions are also presented in this part. Simulation
and numerical results are discussed in Section 4. Finally, thesummary is presented in Section 5.
2. SCHEME OVERVIEW
We propose an adaptive routing algorithm for supportingQoS in hybrid mobile ad hoc networks. The computation ofthe parameters in the routing is adaptive with respect to thecurrent network status. This distributed routing utilizes themost up-to-date local information at each node, where lo-cal states are maintained by a cross-layer mechanism. QoSrequirements are satisfied by adaptively using forward er-ror correction (FEC) at packet level and multipath routingmechanisms based on the current network status.
Due to the effects of changes in network topology andwireless link, QoS performance on a node becomes complex.Therefore, an adaptive QoS routing mechanism needs severalcross-layer functions cooperating harmoniously to deal withchanges in different layers. Firstly, a local QoS performanceprediction mechanism is needed. It should include local in-formation collection and local QoS performance computa-tions. Once this prediction mechanism is built, the secondstep is to construct a distributed routing strategy based onthe predicted QoS performance along selected paths. Thisincludes routing discovery and routing maintenance. A hy-brid asynchronous local information update mechanism isalso introduced.
In order to implement our adaptive multipath routingscheme, three functions distributed in different parts of thenetwork are needed. First, a modified dynamic source rout-ing function is needed. It handles route discovery and col-lecting the local QoS-related information along the selectedroutes. Second, there is a local statistical computation andlink monitoring function located in each node. This functionis used to support the above routing function. It will manageand build the local routing information in each node, whichincludes a QoS-related table. The third function will be incharge of the final decision-making process. The adaptiverouting parameters are derived from the decision-making al-gorithm based on the QoS constraints. They are the numberN of selected paths, parity length k of the FEC, code and theset R of the traffic distribution rates on each path. Withthese functions, adaptive multipath QoS routing is imple-mented.
Obviously, this adaptive routing is a hybrid approach be-cause it includes both a local QoS status precomputationand an on-demand multipath routing algorithm. Routingparameters, such as the number of paths, the forward errorcorrection (FEC) parity length, and the packet distributionrate on each path, are finally determined by the integrateddecision-making system.
The link local status depends mostly on the lower-layerparameters such as the wireless channel characteristics andthe nodes’ mobility, which are provided by our local cross-layer mechanism. Since on-demand routing finds feasiblepaths, given a specified request, it can operate by using eitherthe regular method [20, 21] or an improved method [9, 12].For example, signal strength and link lifetime constraints

QoS Routing by Cross-Layer Cooperation in Ad Hoc Networks 663
will decrease the available paths, but have the advantageof facilitating the location of a more reliable link for rout-ing [9]. We simply select an on-demand multipath rout-ing protocol to use in our system, but modify the requestpacket or reply packet, which depends on where the decisionmaking is located (source or destination). If decision mak-ing takes place in the source, the reply packet structure ismodified to piggyback the local QoS information along thepath. If this occurs at the destination, the request packetstructure will be modified to carry the QoS requirementsfrom the user. This packet also piggybacks local QoS infor-mation along the path. The reply packet sends the final deci-sion back to the source. We design an iterative algorithm tocalculate routing parameters for QoS guarantees. These QoSrequirements can be based on either a delay or a delay andbandwidth requirement, or a packet loss requirement. FECparity length is derived from the difference between the QoSdelay requirement and the average delay on selected pathsunder the packet-loss constraint. Average packet loss underthis FEC scheme is achieved by using multiple routing paths.At the same time, the packet distribution rate on each pathis determined under fair packet-loss and load-balance prin-ciples. Routing maintenance under the same QoS guaranteesis achieved without increasing its computational complexity.
3. CROSS-LAYER COOPERATIVE FUNCTIONS
3.1. Routing functionGenerally, ad hoc routing protocols can be classified intoproactive and reactive protocols [1]. We propose the use ofa distributed dynamic source routing. Split dmultipath rout-ing (SMR) [19] is modified to fulfill the multipath routingfunction in our adaptive routing scheme. It is an on-demandrouting protocol that builds multiple disjoint routes using re-quest/reply cycles. For QoS considerations in our scheme, weextended the structure of a request or a reply packet to in-clude three new fields in the packet. These fields will keepthree parameters defined as follows.
Definition 1. Assume thatD(i, j) is a metric for link (i, j), fora path p = (s, i, j, . . . , k,d). Let
D(p) = D(s, i) +D(i, j) + · · · +D(k,d). (1)
Definition 2. Assume that L(i, j) is a metric for link (i, j), fora path p = (s, i, j, . . . , k,d). Let
L(p) = L(s, i) · L(i, j)·· · ··L(k,d). (2)
Definition 3. Assume that B(i, j) is a metric for link (i, j), fora path p = (s, i, j, . . . , k,d). Let
B(p) = minB(s, i),B(i, j), . . . ,B(k,d)
. (3)
Upon doing this, the receiver on the path will know theaccumulated value of D(p), L(p), and B(p). If we have D(p)represent the accumulated value of the delay, then 1 − L(p)represents the accumulated value of the packet loss and B(p)
represents the minimum bandwidth on the path. Wheneverthe request or reply packet proceeds for another link (i, j), let
D(p) = D(p) +D(i, j), L(p) = L(p) · L(i, j),
B(p) = minB(p),B(i, j)
.
(4)
These QoS parameters are brought into the function of theintegrated decision making located in the destination orsource node. They will also be used in the calculations of theadaptive routing parameters.
The end-to-end delay of a path is the sum of the nodedelay at each node plus the link delay at each link on thatpath. Node delay includes the protocol processing time andthe queuing delay at node i for link (i, j). Link delay is thepropagation delay on link (i, j). The delay metric is definedas
delay(i, j) = nodedelay(i, j) + linkdelay(i, j). (5)
The end-to-end packet-loss rate of a path is an accumula-tion of the packet loss caused by buffer overflow, link failure,and packet discard caused by channel error. The packet lossrate metric is defined as
pkloss(i, j) = pklbo(i, j) + pkllf(i, j) + pkldc(i, j). (6)
The residual bandwidth metric in link (i, j) is
residual B(i, j) = capacity(i, j)− aggregatetraffic(i, j). (7)
Since reply/request packets travel at speeds based on thedelay, a reply/request packet traveling along the path withthe smallest delay will arrive first. So, the source/destinationnode always discovers available routes according to the arriv-ing order of the reply/request packet.
3.2. Local statistical computation andmonitoring function
The second function of our adaptive scheme is the local in-formation statistics and monitoring. It is used to support therouting function stated above. Local QoS parameters used inrouting are obtained from this function.
In order to show how to collect and use information indifferent layers, we divide our discussion into two parts. Onepart is the architecture of the mechanism for monitoring andgathering statistics; another part presents the models used tosupport the architecture.
3.2.1. Architecture
Each node in the network has a monitoring mechanism tocollect and exchange its local information periodically. In ourscheme, a node is assumed to keep up-to-date local informa-tion, including all outgoing links and neighbors. There aretwo tables in each node: one has the link state information,the other has the QoS-related and the link weight informa-tion. This QoS-related table is combined with the original

664 EURASIP Journal on Wireless Communications and Networking
routing table in the routing function. Since a distributed dy-namic source routing is used, an arbitrary link weight can bedefined based on our objective. The state information of oneoutgoing link (i, j) may include (1) average signal-to-noiseratio S(i, j)/N0, (2) link capacity C(i, j), (3) average aggre-gate traffic λ(i, j), (4) link stability ψ(i, j), and (5) neighbornodes’ mobility characteristics sorted by several types ξj .
The local information table is built from the monitor-ing and statistical mechanism in the node. It consists oftwo parts: (1) an exchange information part (i.e., ξj), whichcomes from its neighbors, and (2) a statistical informationcomponent (i.e., λ(i, j)), which comes from its monitoringmechanism. Such information may be located in both thelower and higher layers. For example, average signal-to-noiseratio S(i, j)/N0 is a physical layer parameter. Because thewireless device drivers normally provide signal-to-noise ratioinformation, the receiver can read such information from thedriver periodically. At the same time, link stability ψ(i, j) canbe obtained from the statistics of the beacons exchanged be-tween wireless devices. Although each node’s mobility levelhas different characteristics from others, it is assumed thatonce end nodes of the type ξj are found, the local wirelesschannel model and the nodes’ mobility will be known. Sincethe aforementioned data is already available at different lay-ers in the network, there is no need for an additional mech-anism to gather it. As such, the network overhead associatedwith message exchanges will not increase.
The local QoS-related table will be produced from localstate information. This phase could be implemented by twodifferent approaches. We call them pure statistical methodsand prediction methods.
A statistical method provides a simple approach to col-lect local QoS-related parameters. It is based on an assump-tion that all factors affecting those QoS-related parametersof a node do not change as frequently as other previouslydiscussed statistical values. From this statistical mechanism,a QoS-related table is built. Residual bandwidth can be ob-tained from the information of link capacity C(i, j) and theaverage aggregate traffic, λ(i, j). Average delay and averagepacket loss can be obtained directly from the historical infor-mation in the node. Other information, such as S(i, j)/N0,ψ(i, j), and ξj , can be used to calculate the link weight. Dif-ferent methods about how to build link weight are proposedin literature [9, 22]. We proposed the method in [9], since itsselected paths have higher QoS properties.
A prediction method is another approach to get the in-formation in the local QoS-related table. Packet delay andpacket-loss rate are estimated by predicting link states. Thesepredictions are based on current local information. The linkmodel discussed below will be a bridge to bring lower-layerparameters (e.g., S(i, j)/N0, ξj , etc.) into higher layers. Assuch, they can be combined with the information in higher-layers (e.g., C(i, j), λ(i, j), etc.) to predict the local QoS per-formance.
The difference between the statistical method and predic-tion method is that the former uses historical network infor-mation. This previous information is inherently imprecise inan ad hoc network because the network state and topology
may change at any time. The latter uses the forecasting infor-mation, as it collects all possible information affecting futurenetwork states to calculate the QoS-related information. So,the prediction method is more precise for predicting networkstates in the next transmission interval, though the former isless complex.
3.2.2. Models
In order to support the collection of the desired network in-formation (especially, for the collection of the lower-layer in-formation, i.e., node mobility and wireless channel charac-teristics), we consider the network with three models. First,the network model defines the properties of the networkcomponents, including node classification and channel clas-sification. Second, the node model provides node mobilitycharacteristics (e.g., relative speed, direction, etc.) and the ca-pacity of the node with respect to its communication prop-erties (e.g., transmission power, receiving sensitivity, etc.).Third, the link model characterizes the changes of the wire-less channel with features of mobile ad hoc networks, whichallows the effects of the lower-layer parameters to be factoredinto the computation of network performance at higher lay-ers. All these models quantify values associated with the mes-sages (e.g., node and wireless channel types, etc.) in differentlayers. These quantified values are further used in the statis-tics or prediction regarding local QoS performance. A briefdescription of the three models follows.
(a) Network model
We propose a flexible network model with either mobile orstable nodes. It is a set V of nodes that are interconnectedby a set L of wireless communication links. V and L changeover time since nodes join and leave the network. Nodes inthe network can be classified as belonging to several groupsaccording to node mobility level, which is represented by a setG. Each group has its unique mobile characteristics that willbe later defined in the node’s model, and each node, n, hasits unique identifier. Wireless channels are also classified ac-cording to their local communication environments, whichare represented by a set H . The channel characteristics (e.g.,average signal-to-noise ratio S/N0, channel gain η, etc.) aregrouped according to several typical radio channels. So, a hy-brid network can be represented by the following two sets:
V = G(n)n∈G, L =
H(S
N0,η)
S/N0,η∈H. (8)
(b) Node model
We assume that each node communicates with its neighbors,and a link is available when two nodes are in the transmis-sion range of each other. We consider the communicationrange of the nodes individually in this paper, because we donot want to miss the information of individual nodes comingfrom the physical layer (e.g., transmission power, transmis-sion rate, signal-to-noise ratio, mobility, etc.). Since we arediscussing the link state in the mobile network, two nodes’features are defined: one is the mobility ξi of the node i, which

QoS Routing by Cross-Layer Cooperation in Ad Hoc Networks 665
is characterized by the relative speed v(i, j) with its neigh-bor j on that link, and the direction θ and the movementfunction f (·). These characteristics can be modeled by us-ing random functions (i.e., a mobility model proposed by[23]). This node’s mobility affects the link failure functiondirectly. Another node’s feature is the node’s communicationcoverage range, which is presented by a two-dimension circleareas. The maximum communication distance ri, j(t) fromnode i to node j is used to represent these areas, and it isdetermined by the parameters in the transmitter and the re-ceiver (i.e., transmission power Si, receiving sensitivity βj),physical channel fading αc, and the background noise powerN0. This coverage range finally determines the neighbors ofthe node. So, a node in the mobile network can be modeledas follow:
ξi =v(i, j), θ, f (·), ri, j ≤ αc
√Si(
β ·N0) . (9)
Generally, a link state is dominated by two factors: oneis the lower-layer status, such as node mobility and radiochannel characteristics; the other is the higher-layer traffic.By exchanging neighbor’s local information in the networkmodel, a link’s lower-layer characteristics can be moved up toa higher layer. Combining these lower-layer parameters withthe higher-layer parameters in a link model, we are able topredict the local performance in mobile networks.
(c) Link modelA mobile wireless channel can be modeled by a multiple-state Markov chain. For simplicity, we use a two state Markovmodel. State one represents a good channel state and statetwo is the bad channel state. States are defined by the rangeof signal-to-noise ratio on this mobile wireless link.
We use p to denote the transition probability from stateone to state two and use q to denote the transition probabilityfrom state two to state one. Due to the nodes’ mobility, bothp and q are functions of the nodes’ mobility profile and thechannel parameters. So, the steady-state probabilities follow:
P1(t, ρi, j
) = q
p + q, P2
(t, ρi, j
) = p
p + q, (10)
ρi, j represents the combined mobility parameter of node iand node j, t is a time variable.
3.3. Integrated decision-making function
This function is in charge of the final decision-making pro-cess. The adaptive routing parameters are derived from thedecision-making algorithm. They are the number N of se-lected paths, the parity length k of FEC code, and the setR = r1, r2, . . . , rN of the traffic distribution rate on eachpath. With this function, adaptive multipath QoS routingwill be implemented.
Usually, a QoS request can be a delay constraint, apacket-loss constraint, or a minimum-bandwidth constraint.Many routing algorithms support QoS by guaranteeing only
one of those constraints [8]. We discuss a scheme support-ing multiple constraints. It is assumed that a QoS requestmay include delay constraint, packet-loss constraint, andminimum-bandwidth constraint, all at same time or just oneor two of them.
A packet-level FEC coding with lower coding rate maydecrease packet loss [13, 24], but would increase packet delayin the network. In our scheme, the coding rate is determinedunder both end-to-end delay constraint and packet-loss con-straint, which are guaranteed by using multiple paths. Theincrease of the delay caused by coding is also compensatedby the gain from the parallel transmission mechanism in themultipath routing.
Our strategy is to build a multiobjective optimizationfunction. We set two objective functions under the con-straints in our adaptive multipath routing scheme to satisfythe QoS requirements. One objective function is to minimizethe differences of the actual end-to-end delay in our schemewith its QoS requirements. Another is to minimize the differ-ence of the actual end-to-end packet loss in our scheme withits QoS requirements. Both are constrained by the multipathtransmission and traffic balance mechanisms in the scheme.Bandwidth requirement will be satisfied as a constraint ofthis optimization function if there is an option for it.
Following are the functions that will be used to derive theadaptive routing parameters N , k, R in our multiobjectiveoptimization algorithm. The multiobjective functions are
minD − D(N , k, R),
minP − P(N , k, R) (11)
subject to
D(N , k, R) ≤ D, (12)
P(N , k, R) ≤ P, (13)
B ≤N∑i=1
minBi, (14)
N∑i=1
ri = 1, (15)
ri · Pimin(Bi)
= ri+1 · Pi+1
min(Bi+1), i = 1, 2, . . . ,N − 1, (16)
where
D(N , k, R) =
∑Ni=1
(Di · ri
)N
· Mk
,
P(N , k, R) = P ·
1−
k∑j=0
(M − 1j
)· P j · (1− P)M− j−1
,
P =N∑i=1
(ri · Pi
).
(17)

666 EURASIP Journal on Wireless Communications and Networking
D, B, and P are the delay, bandwidth, and packet loss, re-spectively, requested by the QoS requirements. M is the FECcode length.Di is the average delay on path i. Pi is the averagepacket-loss rate on path i. Bi is the minimum bandwidth onpath i. P is the average packet loss rate on the N paths beforeFEC decoding and P(N , k, R) represents the reconstructedpacket loss probability after the FEC decoding. D(N , k, R)is the actual average end-to-end delay of the data packet afterN parallel transmissions with FEC coding.
The above equations include several functions we con-sidered in the algorithm. Expressions (12) and (13) presentdelay and packet-loss constraints under the end-to-end QoSguarantee, respectively.
For a general BCH code, the generator polynomial is afunction of the code length, M. So, the parity length k willbe derived from the highest power of the generator polyno-mial. One example of the BCH code is the Reed-Solomon(RS) code, which is the popular one used in packet level ap-plication [14]. The direct relations between M and k in RScode are
k = 2γ, c(γ) = M − kM
, (18)
where γ is correctable length in an RS code, and c(γ) is thecode rate.
The recursive equation (16) is constructed to accommo-date load balancing and fair packet loss in each path. Weimplement such a policy by two steps: (1) ordering our pre-computed paths from the largest to the smallest ratio of thepacket loss and the minimum available bandwidth; (2) dis-tributing the data stream to those ordered paths. The distri-bution rate is inversely proportional to the ratio of packet lossand minimum available bandwidth. Through this method,the data stream is spread evenly along the paths. More pack-ets are switched to the lightly loaded and the least packet losspaths than the heavily loaded and large packet loss paths.Once a path fails during a rerouting interval, the packet lossrate and the distribution rate on this path are switched tonew routes. The number of the new routes is derived fromthe same decision algorithm using previous parameters. Theexisting routes do not need any changes at this time. So,routing maintenance is realized without increasing compu-tational complexity of algorithm.
To simplify, we use an iterative algorithm (seeAlgorithm 1) to look for appropriate adaptive parame-ters N , k, and R. If one or two of the QoS requirementsfor delay, bandwidth, or packet loss are not requested, theinitial values of the QoS requirement is set to infinity orzero, resulting in this requirement being skipped because itis always satisfied.
If integrated decision making is done in the source, therequest and reply packets are built, respectively, as follows:
request
source, destination, sequenceID, QoSdelay,D(p)
,
reply
pathID,D(p),L(p),B(p).
(19)
Step 1: initialize the number of the paths selected, N , and set theinitial values of the QoS requirements.Step 2: calculate the traffic distribution rate R of each path,based on its constraints (15), (16). These constraints are basedon the current link status in the network.Step 3: choose the parity length k of the FEC code from thecalculations based on the delay and packet loss along each pathaccording to (12) and (13).Step 4: if the QoS requirements are not satisfied, N = N + 1,return to Step 2, a new path is identified to join the calculations.Step 5: if link failed, return to Step 4.Step 6: output N , k, and R.
Algorithm 1
If integrated decision making is made in the destination,the request and reply packets are built, respectively, as fol-lows:
request
source, destination, squenceID,D(p),L(p),B(p)
,
reply
pathID,N , k, R.(20)
If the final decision is made in the destination, the replymessage cannot be sent out until N path request messagesare all received, since N paths are needed to guarantee thepacket loss and the packet delay. If the final decision is madein the source, the integrated decision-making algorithm canbe started, once the first reply message is received. But the fi-nal decision still needs to be made after N path replies arereceived. It should be noted that the two decision-makingschemes are equivalent at a decision-making node except fora slight difference in the overhead. Both cases will induce aprocessing delay (although this may be very small), due todifferent path delays.
4. SIMULATION AND DISCUSSION
This section presents some numerical and simulation re-sults, showing the performance of the adaptive multipathrouting. We present results in two categories. One part isfor investigating the performance benefits obtained from theadaptive multipath routing. This discussion includes two as-pects: improvement of the QoS performance regarding (1)the end-to-end delay and (2) packet loss, with comparingeach feasible adaptive multipath routing scheme (AMPR) todynamic source routing (DSR) and bandwidth-aware (BAR)QoS routing. Another part is for evaluating integrated per-formance of the scheme through defining three performancemetrics (network control overhead, QoS redundancy, andQoS balance effect). The routing parameters (i.e., path num-ber N , traffic distribution rate R, and EFC parity length k)are also given in the numerical and simulation results.
During the numerical computation regarding the coding,we do not consider the relationship between forward errorcorrection (FEC) parity length and the code length. We justassume that packets with fixed lengths are sent from sources,and then we calculate the parity length under the proposedscheme. This parity length will guarantee that the packet loss

QoS Routing by Cross-Layer Cooperation in Ad Hoc Networks 667
Table 1: Parameters value.
Parameters Value
Integrated traffic rate 0.5–3.0 Mbps (1 Mbps = 2604 packets/s)
Bandwidth 2000–6000 packets/s
Node coverage range 100–1000 m
Radio frequency 2.4e-9
Channel average SNR 1–20 dB
Radio-Tx power 10–20 db
FEC code length 13 + k (packets)
requested by QoS requirements is satisfied. If certain cod-ing techniques (e.g., Reed-Solomon code) were used at thepacket level, then only selected parity length, calculated bythe algorithm (i.e., those that form a valid code), can be usedas the real parity length of the code. Different coding tech-niques have different relationships between the code lengthsand their parity lengths. These relationships are determinedby different generator polynomials. In practice, this codingconstraint must be added to the algorithm.
We use two tables to describe our computation and simu-lation environments. Table 1 lists the parameter value used incomputation and simulation. Table 2 illustrates the scenarioused in GloMoSim2.0 simulation environment.
Figures 1, 2, 3, 4, 5, and 6 show two groups of resultsregarding the improvement of the QoS performance. Bothcompare the end-to-end QoS performance of the adaptivemultipath routing scheme (AMPR) on the multiple pathsto the performance of DSR and the scheme BAR in whichonly bandwidth constraint is considered without other pro-tections (i.e., packet loss, delay, and traffic balance). The firstgroup (Figures 1, 2, and 3) shows the performance changeswith increasing node mobility when the different schemes areused. The second group (Figures 4, 5, and 6) shows perfor-mance changes with increasing average signal power (repre-sented by Tx power) when the different schemes are used.To simplify the illustration, we fix the paths number, (i.e.,N = 2) and only keep the k and R adjustable. Then, weobserve one pair of the source and destination nodes in thenetwork scenario. The k in these figures represents the FECparity length selected by each feasible AMPR scheme whenthe network is in a different state, either node speeds arechanged (i.e., Figures 2 and 3) or transmission powers arechanged (i.e., Figures 5 and 6).
Figures 1 and 4 highlight the variability of the traffic dis-tribution on the selected two paths. For example, in Figure 1,when the nodes’ speed increases from 15 m/s to 20 m/s, thedistribution rates on the two paths change because of thechanges of QoS-related parameters in the selected paths. Ob-viously, the parity length and the distribution rate are adap-tive to the network changes. As the communication param-eters change, the adaptive nature of our scheme guaranteesthe end-to-end QoS performance.
Figure 2 presents the relationships between average end-to-end packet loss probability with the mobility of the nodes,where the line marked as DSR is the performance on one ofthe selected paths by using dynamic source routing, and that
Table 2: Simulation scenarios.
Terrain dimensions (1200 m, 1200 m)
Simulation time 600 s
Mobile model Random waypoint (speed 0–20 m/s)
Propagation path loss Two-ray
Propagation fading model Rayleigh, Ricean
Radio-Rx-type SNR bounded
MAC protocol 802.11
Routing protocol DSR
Node numbers 100
Traffic CBR, 512 bytes
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Traffi
cdi
stri
buti
onra
te
1 2
Paths
Speed 10 m/sSpeed 20 m/sSpeed 30 m/s
Speed 15 m/sSpeed 25 m/s
Figure 1: Traffic distribution rate on each path.
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Ave
rage
pack
etlo
ss
10 15 20 25 30
Average mobility (m/s)
AMPR, N = 2DSR, path1BAR
k = 12 k = 6k = 11 k = 7
k = 8
Figure 2: Average packet loss on paths with mobility.
marked as BER is a case where only bandwidth constraintis involved in the routing. The end-to-end packet loss is de-fined as the complementary value of the packet delivery ratio.

668 EURASIP Journal on Wireless Communications and Networking
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
En
d-to
-en
dde
lay
(s)
10 15 20 25 30
Average mobility (m/s)
AMPR, N = 2DSR, path1BAR
Figure 3: End-to-end delay on paths with mobility.
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Traffi
cdi
stri
buti
onra
te
1 2
Paths
Tx power = 18 dB
Tx power = 16 dB
Tx power = 14 dB
Tx power = 12 dBTx power = 10 dB
Figure 4: Traffic distribution rate on each path.
This packet delivery ratio is obtained by dividing the numberof data packets correctly received by the destination by thenumber of data packets originated by the source. Obviously,mobility increases the instability of the links so that meanpacket loss increased with increasing of the nodes’ velocity.However, due to the FEC protection of our AMPR scheme,packet loss rate is much lower than those in DSR and BARschemes. The induced delay was complemented by the opti-mization algorithm in our QoS routing algorithm.
Figure 5 shows the variations of end-to-end delay of theseschemes with the changes of nodes mobility. Same as inFigure 2, we can see performance goes worse when velocitygoes higher. The DSR case shows large variability of delayon the path, and BAR presents an adaptive feature with themobility but is not as good as the AMPR performed becauseAMPR balances QoS requirements and link performance byadjusting its routing parameters. As it can be seen in the
0.5
0.45
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
Ave
rage
pack
etlo
ss
10 12 14 16 18
Tx power (dB)
DSR, path1DSR, path2
AMPR, N = 2
k = 5 k = 10
k = 1
k = 10 k = 5
Figure 5: Average packet loss on paths with Tx power.
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
En
d-to
-en
dde
lay
(s)
10 12 14 16 18
TX power (dB)
DSR, path1DSR, path2AMPR, N = 2
k = 5k = 10k = 1 k = 10
k = 5
Figure 6: End-to-end delay on paths with Tx power.
figures, parity length and traffic distribution rate dynami-cally change with the link state (including mobility, paths andpower etc.) and QoS requirements.
Corresponding to the above figures, Figures 3 and 6 il-lustrate the relationships between average end-to-end delayor packet loss with the varying of signal power when usingAMPR and DSR. It is clear that AMPR performs better thanthe others. Also it can see the redundancy on QoS perfor-mance (discussed in the following part) shown by the highprotected packet loss. This is benefit of the knowledge aboutQoS requirement and the link status balanced by the dis-tributed traffic and packet-loss protection.
The integrated performance of the AMPR scheme isstudied as another aspect to show the performance benefit.We define three performance metrics to evaluate it. They arenetwork control overhead, QoS redundancy, and QoS bal-ance effect.

QoS Routing by Cross-Layer Cooperation in Ad Hoc Networks 669
7
6
5
4
3
2
1
0
Con
trol
over
hea
d
5 10 15 20 25 30
Average mobility (m/s)
AMPRDSR
Figure 7: Network control overhead with node mobility.
Network control overhead is used to show the efficiencyof the AMPR scheme. It is the ratio of the number of controlmessages propagated by every node and the number of thedata received by the destinations. The definition is
Overhead = Sum(CTRL / EachNode)Sum(ReceivedData /DesNode)
. (21)
Figure 7 shows the comparison of the adaptive multipathrouting and the dynamic source routing. From this figure,we can observe that the overhead caused by DSR is less thanthat caused by multipath routing. This result is expected be-cause searching for diverse multiple paths is more costly thansearching for a single path using DSR. However, as mobilityincreases, multipath routing shows better than single pathrouting. The reason is that more route reconstructions arerequired for DSR than AMPR, due to more link failures re-sulting from higher node mobility.
In order to show the overhead caused by our extra QoSconsiderations, we redefine (21) in a way so that it is the ac-tual ratio of the control bytes to the received bytes. This newratio is required because the sizes of the request/reply packetsare increased to include the local QoS information. Figure 8presents the difference between the QoS multipath routingand the multipath routing without the QoS local informa-tion. Obviously, the QoS support in our scheme slightly in-creases the network’s overhead.
QoS redundancy and QoS balance effect are defined todescribe the integrated balance of the performance improve-ment. They are presented in Figures 9 and 10, respectively.Let
diffx = QoSrequirementx−QoSperformancex. (22)
The following is the definition of the QoS redundancy:
QoSredundancy = diffDelay, packetloss, bandwidthQoSrequirement
.
(23)
0.45
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
Ext
raco
ntr
olov
erh
ead
5 10 15 20 25 30
Average mobility (m/s)
MPR without QoS bytesAMPR with QoS bytes
Figure 8: Extra control overhead from QoS information.
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
QoS
redu
nda
cy
2 3 4 5 6
Path number
QoS group1
QoS group2QoS group3
Figure 9: QoS redundancy versus path number.
This equation may be described by either delay or packetloss. In Figure 9, the delay parameter is used. QoS require-ments vary from user to user. Obviously, QoS redundancyincreases when path number increases under the same QoSrequirement, because increasing the number of routing pathsmeans decreasing the average packet loss and end-to-end de-lay due to the parallel transmissions when traffic load is light.
QoS balance effect is expressed as
QoSbalanceeffect = ∣∣diffDelay−diffPacketloss∣∣. (24)
This equation shows how adaptive multiple path rout-ing ensures the balance between QoS performances withoutwasting network resources. From Figure 10, we can see thatthe difference of the effects between different QoS require-ments is small. The QoS balance effect only increases slightlywith increasing the number of selected paths. This means

670 EURASIP Journal on Wireless Communications and Networking
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
QoS
bala
nce
effec
t
1 2 3 4 5
Path number
QoS group1QoS group2QoS group3
Figure 10: QoS balance effect versus path number.
that the adaptive multipath routing scheme will keep the bal-ance between diffDelay and diffPacketloss.
5. SUMMARY
For QoS support in mobile ad hoc networks, we pro-posed an adaptive multipath routing scheme supported bya cross-layer cooperation mechanism. Using this scheme,performance satisfying QoS requirements is realized. Ad-ditionally, the forward error correction coding technique,along with a multiple-path routing algorithm, is imple-mented to satisfy the multiple QoS requirements. The adap-tive routing is completed in a distributed manner basedon local QoS performance provided by cross-layer mecha-nism. Three functions (routing function, local statistic com-putation and monitoring function, and integrated decision-making function) are implemented in the different partsof the mobile network. Due to the distributed structure,the computation and implementation complexity of therouting scheme are reduced. Also, since routes are discov-ered based on the up-to-date local information and se-lected by the optimization computation, routing parame-ters (e.g., number of paths, FEC parity length, and trafficdistribution rate) are dynamic and optimized. In additionto supporting multiple QoS requirements, traffic balancingand bandwidth resources are factored into our decision-making process. The distributed structure of the local QoSstatistics used in the routing enables this QoS supportmechanism to be scalable in mobile networks. Our sim-ulation results indicate that the performance (i.e., packetloss and end-to-end delay) are much better and less sus-ceptible to the state changes (i.e., node mobility, transmis-sion power, channel characteristics, and the traffic pattern)of the network, compared to a nonadaptive routing strat-egy.
REFERENCES
[1] E. M. Royer and C.-K. Toh, “A review of current routing pro-tocols for ad hoc mobile wireless networks,” IEEE Pers. Com-mun., vol. 6, no. 2, pp. 46–55, 1999.
[2] D. H. Lorenz and A. Orda, “QoS routing in networks with un-certain parameters,” in Proc. 17th Annual Joint Conference ofthe IEEE Computer and Communications Societies (INFOCOM’98), vol. 1, pp. 3–10, San Francisco, Calif, USA, March–April1998.
[3] S. Chen and K. Nahrstedt, “Distributed quality-of-servicerouting in ad hoc networks,” IEEE J. Select. Areas Commun.,vol. 17, no. 8, pp. 1488–1505, 1999.
[4] B. Das and V. Bharghavan, “Routing in ad-hoc networks us-ing minimum connected dominating sets,” in Proc. IEEE In-ternational Conference on Communications (ICC ’97), vol. 1,pp. 376–380, Montreal, Quebec, Canada, June 1997.
[5] S. H. Shah and K. Nahrstedt, “Predictive location-based QoSrouting in mobile ad hoc networks,” in Proc. IEEE Interna-tional Conference on Communications (ICC ’02), vol. 2, pp.1022–1027, New York, NY, USA, April–May 2002.
[6] L. Xiao, J. Wang, and K. Nahrstedt, “The enhanced ticket-based routing algorithm,” in Proc. IEEE International Con-ference on Communications (ICC ’02), vol. 4, pp. 2222–2226,New York, NY, USA, April–May 2002.
[7] I. Gerasimov and R. Simon, “Performance analysis for ad hocQoS routing protocols,” in Proc. IEEE International Mobilityand Wireless Access Workshop (MobiWac ’02), pp. 87–94, FortWorth, Tex, USA, October 2002.
[8] C. R. Lin and L. Chung-Ching, “An on-demand QoS routingprotocol for mobile ad hoc networks,” in Proc. IEEE GlobalTelecommunications Conference (GLOBECOM ’00), vol. 3, pp.1783–1787, San Francisco, Calif, USA, November–December2000.
[9] R. Dube, C. D. Rais, K.-Y. Wang, and S. K. Tripathi, “Signalstability-based adaptive routing (SSA) for ad hoc mobile net-works,” IEEE Pers. Commun., vol. 4, no. 1, pp. 36–45, 1997.
[10] Q. Xue and A. Ganz, “Ad hoc QoS on-demand routing(AQOR) in mobile ad hoc networks,” Journal of Parallel andDistributed Computing, vol. 63, no. 2, pp. 154–165, 2003.
[11] C. Zhu and M. S. Corson, “QoS routing for mobile ad hoc net-works,” in Proc. 21st Annual Joint Conference of the IEEE Com-puter and Communications Societies (INFOCOM ’02), vol. 2,pp. 958–967, New York, NY, USA, June 2002.
[12] A. Tsirigos and Z. J. Haas, “Multipath routing in mobile adhoc networks or how to route in the presence of frequenttopology changes,” in Proc. IEEE Military CommunicationsConference (MILCOM ’01), vol. 2, pp. 878–883, McLean, Va,USA, October 2001.
[13] C. Huitema, “The case for packet level FEC,” in Proc. 5th IFIPInternational Workshop on Protocols for High-Speed Networks(PfHSN ’96), pp. 109–120, Sophia Antipolis, France, October1996.
[14] A. E. Mohr, E. A. Riskin, and R. E. Ladner, “Unequal loss pro-tection: graceful degradation of image quality over packet era-sure channels through forward error correction,” IEEE J. Se-lect. Areas Commun., vol. 18, no. 6, pp. 819–828, 2000.
[15] H. Badis and K. A. Agha, “A distributed algorithm formultiple-metric link state QoS routing problem,” in Proc. In-ternational Workshop On Mobile and Wireless CommunicationsNetworks (IFIP MWCN ’03), Singapore, Singapore, October2003.
[16] M. M. Al-Fawaz and M. E. Woodward, “Fast quality of servicerouting with multiple constraints,” in Proc. 8th IFIP Work-shop on Performance Modelling & Evaluation of ATM & IP Net-works, Ilkley, UK, July 2000.

QoS Routing by Cross-Layer Cooperation in Ad Hoc Networks 671
[17] L. H. M. K. Costa, S. Fdida, and O. C. M. B. Duarte, “Distance-vector QoS-based routing with three metrics,” in Proc. Broad-band Communications, High Performance Networking, andPerformance of Communication Networks (Networking ’00),pp. 847–858, Paris, France, May 2000.
[18] Z. Ye, S. V. Krishnamurthy, and S. K. Tripathi, “A frameworkfor reliable routing in mobile ad hoc networks,” in Proc. 22ndAnnual Joint Conference of the IEEE Computer and Commu-nications Societies (INFOCOM ’03), vol. 1, pp. 270–280, SanFrancisco, Calif, USA, March–April 2003.
[19] S.-J. Lee and M. Gerla, “Split multipath routing with maxi-mally disjoint paths in ad hoc networks,” in Proc. IEEE Inter-national Conference on Communications (ICC ’01), vol. 10, pp.3201–3205, Helsinki, Finland, June 2001.
[20] D. B. Johnson and D. A. Maltz, “Dynamic source routing inad hoc wireless networks,” in Mobile Computing, pp. 153–181,Kluwer Academic, New York, NY, USA, 1996.
[21] A. Nasipuri and S. R. Das, “On-demand multipath routing formobile ad hoc networks,” in Proc. 8th IEEE International Con-ference on Computer Communications and Networks (ICCCN’99), pp. 64–70, Boston, Mass, USA, October 1999.
[22] S.-T. Sheu and J. Chen, “A novel delay-oriented shortest pathrouting protocol for mobile ad hoc networks,” in Proc. IEEEInternational Conference on Communications (ICC ’01), vol. 6,pp. 1930–1934, Helsinki, Finland, June 2001.
[23] A. B. McDonald and T. F. Znati, “A mobility-based frameworkfor adaptive clustering in wireless ad hoc networks,” IEEE J.Select. Areas Commun., vol. 17, no. 8, pp. 1466–1487, 1999.
[24] M. Podolsky, C. Romer, and S. McCanne, “Simulation of FEC-based error control for packet audio on the Internet,” in Proc.17th Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM ’98), vol. 2, pp. 505–515,San Francisco, Calif, USA, March–April 1998.
Hongxia Sun received the Ph.D. degreein computer and communication engineer-ing from Southwest Jiaotong University,Chengdu, China, in 1999. From March 2000to February 2002, she worked in Telecom-munications Research Center at ArizonaState University, and from February 2002 toAugust 2003 worked in Wireless and HighSpeed Networks Lab in Michigan State Uni-versity. She is currently working in Com-puter Science Department at University of Calgary, Canada, as aResearch Associate. Her research interests are in the areas of CDMAsystem, admission and access control, QoS provisioning and per-formance modeling, and evaluation for wireless networks.
Herman D. Hughes received his B.S. de-gree, M.S. degree, and Ph.D. degree fromStillman College, Tuskegee University andUniversity of Louisiana at Lafayette, re-spectively. He began his career as a highschool mathematics teacher in 1959, fol-lowed by faculty positions in mathematicsat Tuskegee University and Grambling StateUniversity. During the summer months, heworked in both industry and government(IBM, American Oil Company, Dow Chemical, Advanced AvionicsResearch Lab). He joined the MSU faculty as an Assistant Professorin the Department of Computer Science and Engineering, 1973.He works in the area of network traffic management and mod-eling with respect to wireless and high-speed networks. His most
recent research emphasis is on quality-of-service (QoS) issues inmobile ad hoc networks (MANETs). He is an Adjunct Professorin the Department of ECE at Georgia Institute of Technology andinvolved in research and consulting. He is affiliated to Georgia Cen-ters for Advanced Telecommunications Technology, housed in theSchool of Electrical and Computer Engineering.

EURASIP Journal on Wireless Communications and Networking 2005:5, 672–685c© 2005 Chiara Buratti et al.
Cross-Layer Design of an Energy-Efficient ClusterFormation Algorithm with Carrier-Sensing MultipleAccess for Wireless Sensor Networks
Chiara BurattiIEIIT-BO/CNR, DEIS, University of Bologna and CNIT, Viale Risorgimento 2, 40136 Bologna, ItalyEmail: [email protected]
Andrea GiorgettiIEIIT-BO/CNR, DEIS, University of Bologna and CNIT, Viale Risorgimento 2, 40136 Bologna, ItalyEmail: [email protected]
Roberto VerdoneIEIIT-BO/CNR, DEIS, University of Bologna and CNIT, Viale Risorgimento 2, 40136 Bologna, ItalyEmail: [email protected]
Received 1 July 2004; Revised 23 May 2005
A new energy-efficient scheme for data transmission in a wireless sensor network (WSN) is proposed, having in mind a typicalapplication including a sink, which periodically triggers the WSN, and nodes uniformly distributed over a specified area. Rout-ing, multiple access control (MAC), physical, energy, and propagation aspects are jointly taken into account through simulation;however, the protocol design is based on some analytical considerations reported in the appendix. Information routing is basedon a clustered self-organized structure; a carrier-sensing multiple access (CSMA) protocol is chosen at MAC layer. Two differentscenarios are examined, characterized by different channel fading rates. Four versions of our protocol are presented, suitably ori-ented to the two different scenarios; two of them implement a cross-layer (CL) approach, where MAC parameters influence boththe network and physical layers. Performance is measured in terms of network lifetime (related to energy efficiency) and packetloss rate (related to network availability). The paper discusses the rationale behind the selection of MAC protocols for WSNs andprovides a complete model characterization spanning from the network layer to the propagation channel. The advantages of theCL approach, with respect to an algorithm which belongs to the well-known class of low-energy adaptive clustering hierarchy(LEACH) protocols, are shown.
Keywords and phrases: wireless sensor networks, routing algorithms, MAC protocols, energy savings strategies, cross-layer design.
1. INTRODUCTION
Wireless sensor networks (WSNs) are composed of low-costlow-energy nodes, whose battery is normally not replacedduring network lifetime. Nodes sense the environment andare equipped with radio transceivers which allow them to actas both transmitters and route-and-forward devices.
Typical applications include a sink, which periodicallytriggers the WSN, and a large number of nodes deployedwithout detailed planning in a given area.
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
The characteristics of WSNs and their applications makeenergy conservation and self-organization primary goalswith respect to per-node fairness and latency [1, 2, 3, 4].As a result, the main performance figure in these cases isnetwork lifetime, that is, the time elapsing between net-work deployment and the moment when the percentage ofnodes still active falls below a given threshold which dependson the application. Accordingly, many self-organizing andenergy-efficient protocols have been recently developed fordata transmission in WSNs [5, 6, 7, 8, 9, 10, 11, 12, 13].
The cross-layer design (CLD) paradigm seems to be apromising solution to solve the conflicts between require-ments of large-scale and long lifetime and the constraints oflimited node resources and low battery capacity [14]. Two

Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm 673
different CL approaches exist: the first considers a layeredstructure of protocols, with vertical entities providing ex-change of data between all layers; the second, instead, con-siders a protocol structure where the different layers cannotbe distinguished. The former approach, instead, is simpler,as it keeps the existing protocol layer structure and providesadditional exchange of information between layers via a sin-gle vertical entity [15]. In this approach, it is important toidentify traditionally hidden interdependencies among lay-ers and find relevant metrics that capture such dependenciesthat have to be exchanged among layers to optimally adaptto network dynamics. Some CL works are based on this ap-proach, but most of them are focused on the interactions be-tween two layers only and consider, mainly, the performancein terms of network lifetime. In [16], the authors develop CLinteractions between MAC and network layers to achieve en-ergy conservation; in particular, the MAC layer provides thenetwork layer with information pertaining to successful re-ception of packets and the network layer, on its turn, choosesthe route that minimizes the error probability. In [17], a clus-ter design method that allows the evaluation of the optimumnumber of clusters to realize power saving and coverage isdeveloped; to do this, a dynamical adjusting of the numberof clusters is proposed.
Our approach refers to the one described above, where asuitable interplay between MAC and routing protocols, andphysical and MAC protocols are introduced; moreover, per-formance is evaluated either in terms of energy efficiency, orin terms of packets loss.
A routing protocol architecture that provides good re-sults in terms of energy efficiency for WSNs is low-energyadaptive clustering hierarchy (LEACH) [9, 10]. LEACH in-cludes a distributed cluster formation technique, which en-ables self-organization of large numbers of nodes with onenode per cluster acting as cluster head (CH), and algorithmsfor adapting clusters and rotating CH roles to evenly dis-tribute the energy load among all nodes. The nodes forwardtheir data to the sink through the CH according to a two-hopstrategy. Starting from the basic idea of LEACH, in [18], anew routing strategy, denoted as LEACH B, is proposed andthe performance shows improvements in terms of networklifetime in a large range of situations.
As far as MAC aspects are concerned, two main familiesof protocols can be considered: those based on collision-freestrategies and those relying on suitable retransmission tech-niques to overcome the potential collisions caused by unco-ordinated transmissions. The proper selection of the familyof MAC protocols is a critical issue for energy efficiency.
In the original proposal of LEACH [9, 10], a time di-vision multiple access (TDMA) schedule is defined by theCHs to ensure that there are no collisions among data mes-sages. However, this centralized control at the CH requiressuitable transmission of control packets which makes theprotocol complex; moreover, this overhead creates energyinefficiency. In [19], a self-organization protocol for WSNscalled self-organizing medium access control for sensor net-works (SMACS) is proposed. Each node maintains a TDMA-like frame in which nodes schedule different time slots to
communicate with its known neighbors. A different ap-proach, though still based on coordinated actions to avoidpacket collisions, can be found in sensor-MAC (S-MAC)[20], which sets the radio in sleeping mode during transmis-sion of other nodes. The contention mechanism is the sameas that in IEEE 802.11 using request-to-send (RTS) and clear-to-send (CTS) packets.
When dealing with collision-prone MAC techniques,carrier-sensing multiple access (CSMA) is a usual choice inWSNs [21]. The advantage here is that no extra signalling toschedule transmissions and coordinate data flows is required;on the other hand, collisions might occur, and suitable back-off algorithms are needed to recover data.
An OMNET++ platform [22] is used in this paper to sim-ulate a WSN composed of several tens of nodes randomlyand uniformly distributed over a square area, accounting forrouting, MAC, physical, energy, and propagation aspects. Inparticular, we propose a novel cluster formation algorithm,that we name LEACH B+, which introduces the possibilityfor nodes to transmit to the sink, by using a direct path, whenit is energetically efficient, and is based on a new CH electionalgorithm which significantly improves network lifetime. Wealso introduce a time division between the data transmissionin the different phases of the algorithm, which allows the re-duction of the packet loss rate. Moreover, we employ a CSMAprotocol based on IEEE 802.11 [23]. If collisions are reducedby suitably dimensioning the average cluster size, this choiceleads to high energy efficiency. A relevant energy waste inCSMA protocols is owed to idle listening that occurs whenthe node is sensing the channel to check whether packets aresent. To avoid this energy loss, an ON/OFF modality whichconsists in turning off and on periodically radio componentscan be implemented as usual in WSNs [21].
We apply the CL paradigm to the design of a protocol forWSNs where MAC and routing (i.e., cluster formation) as-pects are jointly considered and optimized: the decisions tobe taken for cluster formation rely on parameters extractedfrom the MAC; also, some physical layer parameters (liketransmit power) are based on MAC layer protocol status.
We consider two different scenarios, in which the propa-gation channel fluctuations vary at different rates; it is shownthat the protocol design can take advantage of the knowledgeof the fading rate.
We study the network lifetime and the packet loss ratefor the two different scenarios and we make a comparisonbetween the protocols with and without the CL paradigm.
The paper is organized as follows. As in WSNs, the pro-tocol choices are application-specific, Section 2 describes thereference scenario and application, and discusses the choiceof the MAC protocol; Section 3 refers to LEACH B+ rout-ing protocols, with the details on the CHs election and thecluster formation algorithms when no CLD is considered,for the two different scenarios. Then, in Section 4, the MACstrategy is presented. Sections 5 and 6 are devoted to the de-scription of the physical and energy aspects, respectively. TheCL approach and its impact on the cluster formation algo-rithms previously presented in Section 3.2 are discussed inSection 7. Simulation results are reported in Section 8, and

674 EURASIP Journal on Wireless Communications and Networking
d
M
Dmax
Figure 1: Transmission flow during a round. Filled box: sink; filledcircles: cluster heads; circles: noncluster-head nodes.
the conclusions are drawn in the final section. The appendixpresents the new CH election algorithm proposed in this pa-per which shows very good performance improvement withrespect to the protocols previously presented in the litera-ture: the algorithm description is reported in the appendixto make the paper more readable.
2. REFERENCE SCENARIO AND APPLICATION
2.1. Reference scenario
The reference scenario we assume consists of NTOT sensorsrandomly and uniformly distributed over a square area (hav-ing side M) and a sink located at a given distance d from thecenter of the square, as shown in Figure 1. The network mustbe able to provide the information detected by nodes to asink that periodically (every TR seconds) broadcasts a shortpacket that we call “start” and waits for the replies from thenodes. We denote by “round” the period of time between twosuccessive start packets sent by the sink. During each round,all sensors should send their information to the sink.
The wireless channel is assumed to be characterizedby random fluctuations that will be modeled as Gaussiandistributed when being in logarithmic scale. A distance-dependent path loss is also considered. The model is moti-vated by the presence, in many cases for WSNs, of obstacles(ground, foliage, cars, human bodies, depending on the ap-plication).
2.2. Reference application and motivation for thechoice of LEACH and CSMA
This work, though presenting ideas, approaches, and resultswhich are much more general, has been inspired by a spe-cific application: the monitoring of a car parking area wherenodes sense the presence of cars and interact to communi-cate to a sink, which provides information to cars enteringthe parking area about the better way to reach the closestfree slot. Other specific applications that can be considered
are based, for example, on the estimation of a target multi-dimensional process such as, seismic waves through acousticsensors arrays, the ground temperature variations in a smallvolcanic site, or structural monitoring of buildings, by meansof samples captured by nodes randomly and uniformly dis-tributed. Samples are then transmitted to a sink with a self-organizing and distributed routing strategy.
As for network aspects, routing algorithms for WSNs canbe classified into three categories: multihop flat, hierarchical,and location-based [24]. In the first category, each node playsthe same role and sensors collaborate to perform the sensingtask. The second category, instead, refers to protocols wheresensors are organized in clusters, where particular tasks areassigned to cluster heads; thus, nodes have not all the samerole in the network [25, 26]. Finally, in the third kind of pro-tocols, sensors exploit the knowledge of their position in thenetwork, obtained, for example, through GPS. The multihopflat protocols may include scalability issues, whereas the hi-erarchical protocols (unless the number of levels of the hier-archy is unlimited) can be applied only in those cases wherethe maximum distance between nodes and the sink is not toolarge. We will set values of d and M not larger than 100 mt, socluster-based algorithms like those belonging to the LEACHfamily represent a good choice.
Concerning MAC, the selection of a protocol belongingto the families of collision-free or collision-prone strategiesrequires suitable comparison between the time elapsing be-tween two start packets TR and the time coherence of the en-vironment Tcoh which is a measure of how slow or fast thechannel attenuation fluctuates.
In fact, when Tcoh is much larger than TR, a suitablescheduling of transmissions, which requires extra signallingbetween nodes, can be kept fixed for many rounds, thus re-ducing the impact of the related energy wasted on networklifetime. On the other hand, if this condition does not oc-cur, the channel tends to be independent in different rounds,and a collision-free protocol which tries to schedule trans-missions in order to avoid collisions becomes energy ineffi-cient since the extra signalling to manage the scheduling isrequired at each round.
The application we consider is characterized by values ofTR which are larger than, or of the same order as, Tcoh, andthe natural choice in this case is CSMA.
In particular, we will consider two different cases: the firstwith Tcoh TR (scenario 1) and the second with Tcoh TR
(scenario 2); more precisely, in the former case, the chan-nel fluctuations are completely uncorrelated at each round,whereas, in the second scenario, we assume a block-fadingmodel, where the random variables characterizing the prop-agation channel remain constant for two subsequent rounds,and then change according to a memoryless process.
The following assumptions concerning the application,are also made.
(i) Nodes and sink are still (no mobility).(ii) Nodes do not know their position in the area.
(iii) Each node is aware of the sink position with respect toa given reference coordinate system; in particular (as

Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm 675
Start i + 1Start i
TR
t
TCF TIC TTS TCF
Figure 2: Time axis showing the three phases of the routing pro-tocol. Clusters are formed in the cluster formation (CF) period, theCHs collect the packets sent by non-CH nodes in the intracluster(IC) period while CHs transmit toward the sink in the TS period.
described in the appendix), the sink includes the infor-mation about its position in the trigger, so that nodesare aware of it.
(iv) Each node can use power control to vary the transmitpower.
3. THE ROUTING PROTOCOL—LEACH B+
We propose a new routing strategy which combines LEACHB [18] with a simple single-path routing protocol, which in-cludes the direct transmission to the final sink, without pass-ing through CH nodes, when it is energetically efficient.
Moreover, a new CH election algorithm is proposed. Twodifferent versions of our new algorithm are suitably designedfor scenario 1 and 2; we name them LEACH B+ v1 andLEACH B+ v2, respectively.
In case of LEACH B+ v1, a clustering protocol basedon two phases, performed whenever nodes receive the startpacket from the sink, is designed.
(1) Setup
Clusters are formed according to a two-step procedure: a dis-tributed self-election algorithm is run by nodes in order toelect the cluster heads (CHs), then each CH broadcasts apacket informing of its role and those nodes that did not electthemselves as CHs select the cluster to belong to, or decide totransmit directly to the sink. Details are given below.
(2) Transmission
Each non-CH node, belonging to a given cluster, transmits itspacket to the respective CH, which, in turn, sends all packetsreceived from the cluster, plus the one it generated, to the re-mote sink. Alternatively, nodes transmit directly to the sink.
In LEACH B+ v2, instead, the first phase is performedonce every two rounds, because nodes, which elected them-selves as CHs, remain CHs for the following round and sothe CH election algorithm is not carried out at every round(except for the case in which there are no CHs elected. In thelatter case, in fact, the CH election algorithm is performed atthe subsequent round, too). By using this strategy, CH nodeshave to transmit the initial broadcast packet only once ev-ery two rounds, since the information about which sensorsare CHs remains unchanged for two rounds. As we will seein Section 8, this version allows the decrease of energy con-sumption.
All other aspects of LEACH B+, which will be describedin this section, and Sections 4–6, do not change in the twoversions (namely, v1 and v2).
In this paper, we also introduce a subdivision of the timeaxis into three periods, one for each phase of the algorithm(taking into account that the first phase is divided, on itsturn, into two phases), to reduce collisions between packets(see Figure 2).
(1) TCF: during this period, the start packet and CHsbroadcast packets are sent.
(2) TIC: non-CH nodes send their packets to the CHs.(3) TTS denotes transmissions toward the sink.
3.1. Cluster-head selection algorithm
LEACH B+ forms clusters by using a distributed algorithm,where nodes make autonomous decisions without any cen-tralized control. When a node receives the start packet, itdecides whether or not to become a CH for the currentround. This algorithm allows the election of a certain num-ber of CHs, on average equal to N . Being a CH node is muchmore energy intensive than being a non-CH node. Therefore,LEACH incorporates a randomized rotation of the CH roleamong sensors to avoid draining the battery of a particularset of sensors in the network [10]. Ensuring that all nodes be-come CHs the same number of times, each node will be CHonce in NTOT/N rounds on average. The rationale behind thedetermination of the value of N is described in the appendixthrough suitable analytical formulation.
To do this, we consider an indicator function Cp(i) de-termining whether or not node p, at the ith round, has beena CH in the most recent R∗ = NTOT/N − 1 rounds (i.e.,Cp(i) = 0 if node p has been a CH and 1 otherwise), wherex stands for the largest integer less than or equal to x. Thedecision to become or not a CH is made by node p choosinga random number between 0 and 1. If the number is less thana threshold Tp(i), the node becomes a CH. The threshold isset as
Tp(i)
=
0, Cp(i)=0,
Np
NTOT−Np ·(i mod NTOT/Np
) , Cp(i)=1, R<R∗,
1, Cp(i)=1, R=R∗,(1)
where R is a counter incremented at each round and set tozero whenever it reaches R∗ or when the node becomes CH,while Np is set equal to N initially. In the appendix, N isevaluated in a more realistic way with respect to LEACH B.Therefore, according to (1), the mechanism which allows therotation of the CH role is the following: every node startswithCp(i) = 1, so it has the possibility to become CH; when anode elects itself CH, Cp(i) is set to zero and the node cannotbecome CH for R∗ rounds; after that, Cp(i) is set to one, sothe node can become CH again with probability that grows

676 EURASIP Journal on Wireless Communications and Networking
with i; while if a node does not elect itself CH for R∗ consec-utive rounds, it is forced to be a CH for the current round bysetting Tp(i) = 1.
In conventional LEACH [10], N is a fixed value and it isdetermined a priori. In LEACH B+, we propose a new adap-tive strategy to choose the CHs election frequency, varying Nfor each node in such a way that we consider the energy dis-sipation of each node the last time it has assumed the role ofCH. As can be seen in [18], this strategy improves networklifetime.
If we consider an average situation, each CH has to sendNTOT/(N + 1) (as we will see below the (N + 1)th clusteris formed by nodes that choose to transmit to the sink viaa direct link) packets to the final sink with an energy con-sumption that is dependent on its position, plus the energyrequired to receive NTOT/(N + 1)− 1 packets from non-CHsthat belong to the cluster. As explained in Section 5, we as-sume that the transmission power of each node (either CHor non-CH) is controlled adaptively in order to guarantee anadequate received power at the destination nodes with theminimum required energy. Therefore, since the energy dissi-pated by each CH is dependent on its position with respect tothe sink, we can evaluate the worst and the best case in termsof energy consumption that is useful to perform our adaptivestrategy,
ECH-far =(NTOT
N + 1− 1
)ER +
(NTOT
N + 1
)ET-far,
ECH-close =(NTOT
N + 1− 1
)ER +
(NTOT
N + 1
)ET-close,
(2)
where
(i) ER is the energy spent to receive a packet (seeSection 6);
(ii) ET-far and ET-close are the energies spent to transmit apacket, considering two different transmission ranges:the distance between the sink and the farthest point ofthe network Dmax, and that between the sink and theclosest one d −M/2.
Starting from the average of these energies
ECH-avg = ECH-far + ECH-close
2, (3)
we fix two different thresholds as follows:
ECH-sup = ECH-avg + 0.6 · ECH-avg,
ECH-inf = ECH-avg − 0.6 · ECH-avg.(4)
If the energy dissipated by node p the last time it as-sumed the role of CH is larger than ECH-sup, the value of N
used by node p, Np, is decreased by 1, so that this node willhave smaller probability to become CH in the next rounds.At the opposite, if this energy is smaller than ECH-inf, Np is
increased by 1. Finally, if the energy dissipated is between thetwo thresholds, the value of Np does not change.
Particular attention must be paid on the cluster electionphase. In fact, the CH election should guarantee the mini-mum energy consumption by means of the cluster-head ro-tation algorithm presented. In order to assess the validity ofthe algorithm proposed, several simulations have been per-formed. As a result, we can state that in LEACH B+, the ma-jority of CHs are located, on average, on a circumference cen-tered in the sink, and having radius equal to Dmax/2, which isclearly an efficient condition from the energy consumptionviewpoint.
3.2. Cluster formation algorithm
Concerning cluster formation, each node chooses its CH byevaluating the energy dissipated in the complete path be-tween itself and the final sink, via the CH, for the transmis-sion of its packet.
The start packet sent by the sink contains the informationabout the power used for its transmission, so every receiv-ing node can compute the loss between itself and the sink.The broadcast packet sent by each CH includes the valueof power used for this transmission and the loss estimatedpreviously. Every time a non-CH node receives a broadcastpacket, it estimates the total path loss between it and all theCHs whose packets have been successfully detected by thenode, and reads the loss between the CH and the sink. Ev-ery node selects the path characterized by the smallest totalpath loss, considering also the possibility to transmit directlyits packet to the sink without passing through any CH. So ev-ery non-CH selects the link (through the CH or not) whichcorresponds to the lowest path loss.
Finally, if a non-CH node does not receive any broadcastpackets correctly, it is forced to transmit directly to the sink.
4. THE MAC PROTOCOL PROPOSED
The access to the wireless channel is controlled through aCSMA protocol, whose mechanism has been inspired by theIEEE 802.11 standard [23]. According to this protocol, eachnode, before transmitting, invokes a carrier-sensing mecha-nism to determine the busy/idle state of the channel. Afterthe sensing phase, one out of two situations may occur.
(1) Channel free: the node generates a random backoff pe-riodTb for an additional deferral time before transmit-ting its packet.
(2) Channel busy: the algorithm is different for a non-CH or a CH. The former stops sensing and moves toa sleeping state, where it remains till the end of thepacket transmission; therefore, the node turns off andit preserves energy. In fact, we assume that in eachtransmitted packet, there is a duration field that in-dicates how long the remaining transmission will be,so when a node receives a packet destined to anothernode, it knows for how long it cannot transmit [20]. Inthe latter case, the node keeps on, because it could re-ceive packets from other nodes belonging to its cluster.

Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm 677
S APPT AMPPT
AT GT
U APPRPR
AR GR
D
Figure 3: Transmission system block diagram.
The duration of the carrier-sensing phase Ts is not fixed; it isconsidered to be random and given by
Ts = (1 + r) ·DIFS, (5)
where the following exist.
(i) Distributed interframe space (DIFS) is the minimumsensing length and we take it equal to the data trans-mission time; assuming a negligible propagation delay,as is usually done for sensor networks [20], the datatransmission time is the time during which the packetoccupies the channel and is given by the ratio betweenthe packet size z and the bit rate Rb.
(ii) r is a random number drawn from a uniform distribu-tion over the interval [0, 1).
The choice of a random sensing time [20] allows the reduc-tion of packet collision probability; there are two possiblecauses of collision: two or more nodes could select the samevalue of r, so they end sensing at the same time and transmitsimultaneously, or a node is not able to perceive a communi-cation in the channel and could decide to transmit its packetthough the channel is busy (hidden node problem). By fixinga minimum received power for a successful channel sensingPSmin, in fact, a node which receives a packet with a powersmaller than such value does not “hear” the transmitter.
We assume a packet is captured by the receiver, even incase of packet collisions if
Pr0∑Ni=1 Pri
> α0, (6)
where
(i) Pr0 is the power received from the useful signal;(ii) Pri is the ith interference power;
(iii) N is the number of colliding packets;(iv) α0 is the capture threshold which we set equal to 3 dB.
When condition (6) is not fulfilled, the packet is lost andthe receiving node requires the packet retransmission. Anacknowledge mechanism is not provided in this algorithm,because the transmission and the reception of these packetscause an increase of the energy spent. Thus, we consider onlythe use of retransmission requests, when nodes receive wrongpackets.
To minimize collisions during contention between multi-ple nodes, as mentioned above, we introduce a backoff algo-rithm, namely the exponential backoff algorithm adopted inthe IEEE 802.11 MAC protocol [23]. According to this algo-rithm, nodes, once the sensing phase has ended, in the case offree channel do not transmit their packets immediately, butonly after a random backoff time given by
Tb = rc ·DIFS, (7)
where rc is a random integer drawn from a uniformly dis-tribution over the interval [0,CW], where CW is the con-tention window value, that is, an integer within the rangeof values CWmin and CWmax (CWmin < CW < CWmax).We used the 802.11 standard values, so CWmin = 7 andCWmax = 255. The contention window parameter will takethe initial value of CWmin. Then, in case of collision, CW isaugmented and the new value is computed as
CW = CWmin · 2− 1. (8)
So, there is an exponential increase of the contention windowvalue up to CWmax, or till a packet is correctly received. Inboth cases, CW will be reset to CWmin.
The performance of CSMA protocols are mainly affectedby the hidden node problem and the amount of data trans-mitted by nodes to the CHs. First of all, we want to pointout that the random changing of the CHs can mitigate thehidden terminal problem. In fact, in every round in LEACHB+ v1, or every two rounds in LEACH B+ v2, the clusterschange according to the cluster-head election algorithm de-fined. Therefore, if a node is unfortunately hidden during around, this does not preclude that this situation changes inthe following rounds. As far as the impact of the MAC pro-tocol on network performance is concerned, we have ana-lyzed its behavior for different packet sizes z. In particular,an increase of the packet size from 127 to 1016 bits corre-sponds to an expected decreasing of the network lifetime dueto the augmented number of collisions, and a doubling of thepacket loss rate.
5. PHYSICAL ASPECTS
5.1. Transmission system
In this section, we describe the transceiver scheme adoptedfor each node, the radio propagation channel, and the powerrequired for the transmission. The block diagram of thetransmitting and receiving parts that are considered in ouranalysis is reported in Figure 3. S and U are the source of bitsand the final user, respectively. The block APPT is composedof a coder, a modulator, and an up-converter, AMP repre-sents the power amplifier for the transmission, while APPR
is composed by a down-converter, a demodulator, and a de-coder. Finally, the blocks AT, AR represent the attenuationsdue to the connections by transmitting and receiving anten-nas, respectively, while GT and GR are the antenna gains.

678 EURASIP Journal on Wireless Communications and Networking
As far as propagation is concerned, we assume a statis-tic channel characterized by a Gaussian distribution of loss,when measured in dB,
L(dB) = PT(dBm)− PR(dBm), (9)
where PT and PR represent the generic transmit and receivepowers, respectively. The logarithmic value of L has mean de-pending on link distance, antenna gains, and so forth. Moreprecisely, we assume the following expression for loss at dis-tance D:
L(dB) =((
4π fcd0/c)2(
D/d0)α
Gant
)(dB) + S, (10)
where
(i) fc(Hz) is the carrier frequency, c(m/s) is the speed oflight, d0(m) is a reference distance, and α is the pathloss exponent;
(ii) Gant is given by
Gant = GTGR
ATAR; (11)
(iii) S is a Gaussian random variable, with variance σ2 andzero mean.
In this paper, we fix two power thresholds: the smallestone is the minimum receiver sensitivity PSmin and the otheris the receiver sensitivity PRmin. A packet is correctly detectedwhenever PR is larger than PRmin and it is “heard” when PR islarger than PSmin.
As far as the transmission scheme is concerned, we as-sume a binary phase-shift keying (BPSK) modulation with aBCH(127, 50, 13) code, that is, with packet length z = 127and information bits k = 50, able to correct up to t = 13 bits.
5.2. Packet error probability
Assuming a transmission scheme based on BPSK modula-tion, the two thresholds PRmin and PSmin can be derived start-ing from the bit error probability [27]
Peb = 12
erfc
√Eb
N0Rc, (12)
where Eb is the received energy per information bit, Rc =k/n = 0.394 is the coding rate, and
W = PR
N0Rb(13)
is the signal-to-noise ratio at the receiver input. In particu-lar, N0 is the one-sided power spectral density of the additivewhite Gaussian noise (AWGN) which depends on the noisefigure F of the receiver, that is,
N0 = KBFT0, (14)
Table 1: Reference parameters.
Parameter Value Parameter Value
fc 5 GHz Rb 50 Mbps
d0 0.2 m Pep 10−2
α 2.5 WR 5.12 dB
σ 3 dB WS 3 dB
Gant −20 dB PRmin 5.92 pW
F 10 dB PSmin 3.4 pW
ηamp 0.8 POUTSN 0.01
PAPPT 3.63 mW POUTNS 0.05
PAPPR 11.13 mW POUTBr 0.2
PAPPS 5.565 mW tACT 0.5
tCF 0.01 tIC 0.25
where KB is Boltzmann’s constant and T0 = 290 K. Consid-ering packets of z bits, packet error probability is then givenby
Pep =z∑
i=t+1
(z
i
)Pi
eb(1− Peb)z−i. (15)
Now, for a given value of Pep, we can derive Peb, and thenfrom (12)–(14), the corresponding received power can beevaluated. In particular, by fixing a packet error probabilityof Pep = 10−2, we derive the receiver sensitivity as
PRmin =WRN0Rb, (16)
where WR is the signal-to-noise ratio needed to detect apacket. By fixing a signal-to-noise ratio equal to 3 dB, theminimum receiver power PSmin required to “hear” a packetis derived. All the parameters involved in the derivation ofthese two power thresholds are reported in Table 1.
Having fixed the two aforementioned thresholds, the be-havior of nodes when they receive the start packet is as fol-lows.
(i) If PR < PSmin, the node cannot perceive the packet, andtherefore it does not transmit its own packet for thatround.
(ii) If PSmin < PR < PRmin, it perceives the start packet but itcannot compute the path loss between it and the sink,since the information about the transmit power usedby the sink cannot be read.
(iii) If PR > PRmin, it can compute the loss.
5.3. Power control
Now we consider the transmission power used in the differ-ent phases of the LEACH B algorithm.
The start packet is transmitted using a value of powergiven by
PTmax = PRmin(4π fcd0/c
)2(Dmax/d0
)αMf
Gant, (17)

Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm 679
where the transmission range Dmax is the distance betweenthe sink and the point in the scenario farther from it (seeFigure 1). Mf is a fade margin suitably introduced to keepunder control the probability of packet failure owing to therandom fluctuations of the channel; it can be written as
Mf =√
2σ · erfc−1(2POUT), (18)
where POUT is the maximum outage probability which de-pends on the type of transmission. The outage probability isthe probability that the packet reception fails. For the trans-mission of the start packet, we use POUT = POUTSN . Thebroadcast CHs messages are transmitted with
PBr = PRmin(4π fcd0/c
)2(dbroadcast/d0
)αMf
Gant, (19)
where Mf is given by (18) with POUT = POUTBr and dbroadcast isthe area diagonal. As we explained, nodes do not know theirposition in the network, so they must behave like they werein the worst case.
In both cases (start and broadcast packets), the receivedpower at the maximum distance is given by
PR(dBm) = PRmin(dBm) + Mf(dB)− S. (20)
Note that, depending on the value of the margin Mf, somepackets can be lost owing to the channel fluctuations.
During each round, we assume a stationary channel, solosses between CHs and non-CHs do not change. With thisassumption in mind, every node can transmit its packet tothe CH by using the minimum power that allows its correctreception. Therefore, the transmit power used by a genericnon-CH node to send its packet to the relevant CH is
PTx = PRmin · L, (21)
where L is the path loss between the CH and the node that istransmitting.
Finally, we consider the transmission power of the mes-sages sent by the CHs to the sink, or any nodes directly trans-mitting to the sink. If these nodes succeeded in computingthe loss between them and the sink, by extracting the infor-mation from the start packet regarding its transmit powerand measuring the received power level, their transmit poweris set according to (21) where L, in this case, is the path lossbetween the transmitting node and the sink. If such node wasnot able to estimate L, it will transmit using the power levelPTmax. In this case, Mf is given by (18) with POUT = POUTNS .
All parameter values not specified in the text of the paperare reported in Table 1.
6. ENERGY CHARACTERIZATION
The central problem for sensor networks is energy consump-tion. It is important to estimate the energy spent, during eachround, by all nodes, when they transmit, receive, or sense thechannel.
Start i + 1Start i
t
TCF TIC TTS
TACT
ON
15 DIFS DIFS
OFF ON OFF ON
TACT
ON· · ·
Figure 4: Time axis for each node in the ON/OFF mode.
TransmissionThe energy dissipated for the packet transmission dependson the value of the transmission power
ET = z ·(PAPPT
Rbc
+PT
Rbc · ηamp
), (22)
where (see Figure 3)
(i) PAPPT includes the power dissipated in the baseband,oscillator, frequency synthesizer, mixer, filters, and soforth;
(ii) PT/ηamp is the power dissipated within the power am-plifier, where PT is given by (17), (19), or (21), accord-ing to the specific cases;
(iii) ηamp ≤ 1 is the transmitter amplifier efficiency;(iv) Rbc = Rb/Rc is the coded bit rate.
Reception and Sensing
In the radio receiver model we use, there is no difference be-tween the energy levels dissipated during reception or sens-ing [20]. The energy needed to keep the node on is given by
Esens = PAPPS · T , (23)
where PAPPS represents the power dissipated during the sens-ing phase (see Table 1) and T is the time interval duringwhich the node senses the channel.
In particular, the energy consumed to receive a packet is
ER = z · PAPPR
Rbc
, (24)
where PAPPR represents the power dissipated during the re-ceiving phase.
Note that in case nodes do not know when the followingstart packet will arrive, we have a high energy consumptiondue to the fact that nodes should be on between the end of around and the beginning of the following one.
As we can see in Section 8, we investigate performance interms of network “lifetime.” To extend the nodes lifetime, weintroduced the ON/OFF modality (Figure 4) in which, afterthe start packet’s arrival, nodes stay on for a certain intervalof time denoted as TACT and then they turn off and on alter-natively till the following start. In particular, we have chosen

680 EURASIP Journal on Wireless Communications and Networking
(i) the duration of the ON phase equal to DIFS,(ii) the duration of the OFF phase equal to 15 ·DIFS,
according to suitable considerations, not reported for thesake of conciseness.
To be sure that a start packet is detected by each noderegardless of the ON/OFF mechanism, the sink must trans-mit sixteen sequential starting packets so that every node isable to receive at least one of these. Note that this requiresthat the sink has no energy consumption problems. Throughthis modality, we obtain a significant improvement of perfor-mance in terms of system lifetime.
As mentioned in Section 3, TACT is divided in the threeperiods of duration TCF, TIC, and TTS.
7. CROSS-LAYER DESIGN
7.1. Scenario 1—CLD v1
To improve network performance, we introduce a modi-fied version of LEACH B+ v1, based on the CL paradigm,denoted as CLD v1, where interactions between physicaland MAC layers and MAC and network layers are intro-duced.
For the interaction between physical and MAC layers, apower control algorithm is proposed which accounts for thenumber of retransmissions required. As mentioned, whennodes, either CHs or non-CHs, do not know the loss be-tween themselves and the sink, they transmit with a highpower level (obtained by assuming that the node is at a dis-tance Dmax from the sink). Since in this case nodes waste alot of energy, we impose that they transmit to the sink byusing a power equal to PTmax/2, while they use PTmax whenthey receive a retransmission request by the sink. In this way,the MAC layer affects the physical layer, namely the transmitpower algorithm.
Concerning the CL interactions between the MAC andnetwork layers, we use, once again, the number of retrans-missions requested to influence the CH election algorithmfor the following rounds. In Section 3.1, we stated that thevalue of N used by a node p, Np, is decreased by 1 when theenergy dissipated by the node the last time it assumed the roleof CH is larger than ECH-sup, and it is increased by 1 when theenergy spent is less than ECH-inf. A possible CL interaction toreduce the energy waste consists in increasing and decreasingNp, by considering not only the energy dissipated, but alsothe number of retransmissions requested by the sink to a CHin the last round it assumed the role of CH. In particular, Np
is increased when the energy spent is low and the nodes havereceived less than 2 retransmission requests from the sink; atthe opposite, Np is decreased when the CH has dissipated alot of energy and has received more than 3 retransmissionrequests. By increasing Np, the probability that the node willbe CH for the next rounds increases and, in this way, this op-portunity is given only to nodes that are in a good locationwith respect to the sink, either in terms of energy expense, orin terms of collisions.
Table 2: Round when the first node expires.
LEACH B LEACH B+ v1
Nodes Nround/Joule Nround/Joule
30 16949 37284
25 22560 41985
20 29480 45143
15 32370 48205
10 42680 51550
5 48410 59375
0 56150 63900
7.2. Scenario 2—CLD v2
In this case, as stated previously, we assume that the loss be-tween two nodes remains unchanged for two rounds; a suit-able protocol design can take advantage of this. We definehere a new version of LEACH B+, namely CLD v2, which in-cludes all the techniques already introduced in CLD v1 plussome additional features: the information about the requestof retransmissions obtained at the first of the two rounds isused at the second round to change the structure of the clus-ter. At the first round, in fact, every non-CH node recordsthe value of the loss between itself and the sink and the totallosses between itself and the sink, passing through the CHs.At the beginning of the second round, if it has received one ormore retransmission requests, it changes the cluster to whichit belongs to. It will choose the CH, or also the sink, whichcorresponds to the smallest loss, avoiding the previous CHconsidered. No adaptive strategy is performed between thesecond and the third rounds, for example, because, owing tothe fact that the channel changes, in the third round, there isa new election of the CH nodes and new clusters are formed.
Moreover, when a non-CH node belonging to a certaincluster receives a retransmission request from its CH, to re-duce the packet losses, it transmits its packet directly to thesink, without passing through the CH. So, nodes can changethe cluster they belong to according to the number of retrans-missions that occurred within the cluster. However, the directtransmissions to the sink are very energy expensive, in partic-ular for those nodes that are farther from the sink, so this CLprotocol, even if advantageous in terms of packet loss rate, isexpected to worsen network lifetime.
8. NUMERICAL RESULTS
We show the performance results obtained by means of asimulator implemented on an OMNET++ platform [22]. Allsimulation parameters related to a network with M = d =100 mt are reported in Table 1. All values of time intervalsare normalized with respect to TR; so, for example, tACT isequal to TACT/TR, and so forth.
8.1. Improvement with respect to LEACH B
First of all, in Table 2, we compare the round when the firstnode expires for LEACH B [18] and the new LEACH B+ v1

Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm 681
76543×104
35
30
25
20
15
10
5
0
Nu
mbe
rof
nod
esst
illal
ive
Nround/Joule
LEACH B+ v1CLD v1
Figure 5: Number of nodes still alive as a function of the numberof rounds, normalized with respect to energy.
protocol by showing the clear improvement provided by ourproposal. Note that in Table 2 as well as in the following fig-ures, the value of the number of rounds is normalized withrespect to the value of energy which equipped the sensorsinitially.
8.2. Scenario 1
In this section, we illustrate a comparison between the per-formance obtained in scenario 1 with the LEACH B+ v1 pro-tocol and with CLD v1 (i.e., without or with CL approachimplemented, resp.).
In Figure 5, we compare the network lifetime of the twoprotocols, considering a network of NTOT = 30 nodes. In par-ticular, we show the number of nodes still alive as a functionof time, expressed in terms of number of rounds. The figureshows that the CL approach allows an increase of networklifetime. In Figure 6, we show the round when the first nodeexpires, as a function of NTOT; this parameter increases by in-creasing NTOT. As we can notice, the improvement due to theCL approach is kept even by varying NTOT (i.e., the densityof nodes).
Now, we consider the packet losses. The causes for theselosses are the following.
(1) Fading: when PR < PRmin, the packet is lost; the mar-gin Mf is set in order to control the packet loss probabilityon each link, but the total packet loss rate in the network isdifferent, as it is a combination of the events on the differentlinks.
(2) Collisions: notwithstanding the use of a retransmis-sion mechanism, some packets could be lost. In fact, when anode transmits, it is not able to perceive a packet directed toitself, so it cannot ask for retransmission.
In Figure 7, we show the packet loss rate as a function ofNTOT for the two protocols. The losses increase, by increasing
5040302010
×103 47
44
41
38
35
32
Rou
nd
atw
hic
hth
efi
rst
nod
edi
es
NTOT
LEACH B+LEACH B+ with CLDSL
Figure 6: Round when the first node expires as a function of NTOT.
NTOT, owing to the larger traffic. As we can see, the two pro-tocols have about the same values of packet loss rate, so wecan conclude that CLD v1 improves network lifetime with-out increasing the packet loss rate.
Finally, in Figure 8, we show the round when the firstnode expires as a function of
β = PAPPS
PAPPR
(25)
to show that there is a strong dependence between networklifetime and the power spent in the sensing state. In fact, inour protocol, the time during which sensors are in a sens-ing state is high, so if in this state they spend the same en-ergy as in the receiving state (β = 1), their life will be muchshorter.
8.3. Scenario 2
This section is dedicated to show the comparison betweenLEACH B+ v2 and CLD v2.
Concerning network lifetime (see Figure 9), LEACH B+v2 performs better than v1, because, in the former case, CHnodes have to transmit half of the broadcast packets than inthe latter. However, when we introduce the CL strategy de-scribed in Section 7.2, we have a decrease of network life-time, owing to the fact that we increase the number of di-rect transmissions to the sink, which are very expensive. Thisprotocol, however, allows a significant decrease of packet lossrate (see Figure 10) either with respect to LEACH B+ v1 orv2. So, in this scenario, the CL approach proposed, account-ing for MAC protocol status at network level, provides ad-vantages in terms of loss rate at the expense of energy effi-ciency.

682 EURASIP Journal on Wireless Communications and Networking
5040302010
0.1
0.08
0.06
0.04
0.02
0
Pack
etlo
ssra
te
NTOT
LEACH B+ v1CLD v2
Figure 7: Packet loss rate as a function of NTOT.
10.80.60.40.20
×103 55
50
45
40
35
30
Rou
nd
atw
hic
hth
efi
rst
nod
edi
es
β
LEACH B+ v1CLD v1
Figure 8: Round when the first node dies as a function of β.
9. CONCLUSIONS
In this paper, a CSMA-based WSN composed of several tensof nodes uniformly distributed over a square area is ana-lyzed by means of simulations taking into account the com-plete stack of layers. We proposed four different versionsof LEACH B+, a new protocol presented here which out-performs the other algorithms belonging to the same class(LEACH), previously presented in the literature. LEACH B+is a hybrid protocol which allows nodes to use a single-or two-hop path towards the sink according to energy-
9876543×104
35
30
25
20
15
10
5
0
Nu
mbe
rof
nod
esst
illal
ive
Nround/Joule
LEACH B+ v1LEACH B+ v2CLD v2
Figure 9: Number of nodes still alive as a function of the numberof rounds, normalized with respect to the energy.
5040302010
0.1
0.08
0.06
0.04
0.02
0
Pack
etlo
ssra
te
NTOT
LEACH B+ v1LEACH B+ v2CLD v2
Figure 10: Packet loss rate as a function of NTOT.
related considerations. Moreover, the distributed algorithmfor cluster-head self-election has been suitably designedstarting from some novel analytical descriptions of the en-ergy spent on the average at each round; this model was re-ported in the appendix to make easier reading of the paper.
We introduced the CL paradigm, which is shown here toimprove performance. In particular, we focused on two dif-ferent scenarios, characterized by two different values of theratio between TR and Tcoh. The two different CL approaches,derived from the two scenarios, allow the improvement of

Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm 683
the network lifetime (scenario 1) or the packet loss rate (sce-nario 2).
The paper jointly takes routing, MAC, physical, energy,and propagation aspects into account, and this makes thedescription of the model used rather complex. Owing tothe many parameters of the model, the results shown rep-resent a sample among the many found by the authors, but itwas found out that the conclusions drawn can be consideredmore general and applicable to other sets of input parame-ters.
APPENDICES
A. COMPUTATION OF N
N is chosen in order to minimize the total transmission en-ergy, which is the sum of the energies dissipated by eachnode, CH and non-CH, in a round.
We assumed that there are NTOT nodes distributed uni-formly in an M ×M region. If N nodes became CHs, therewould be N + 1 clusters, because we consider also the clusterformed by nodes which transmit directly to the sink. For thepurpose of the determination of N , we assume that all N + 1clusters are equally loaded, so in every cluster, there are onaverage NTOT/(N + 1) nodes (one CH and NTOT/(N + 1)− 1non-CH nodes).
The total energy spent in a round is given on the averageby
ETOT = ECH · N + Enon-CH→CH ·Nnon-CH→CH
+ Enon-CH→S ·Nnon-CH→S,(A.1)
where
(i) ECH is the energy dissipated by each CH;(ii) Enon-CH→CH is the energy dissipated by each non-CH
which chooses a CH to transmit to and
Nnon-CH→CH = N ·(NTOT
N + 1− 1
)(A.2)
is the total average number of non-CHs which trans-mit to a CH;
(iii) Enon-CH→S is the energy dissipated by each non-CHwhich chooses to transmit to the sink and
Nnon-CH→S = NTOT
N + 1(A.3)
is the number of non-CHs which transmit directly tothe sink, on the average.
Each CH dissipates energy to send the broadcast packetto transmit its own packet and the packets of the other nodesto the final sink and to make sensing (the energy spent toreceive packets can be neglected). We assume an averagesituation where the shadowing is not considered and we
suppose that there are not collisions in the system, thus wedo not consider the energy dissipated for the retransmissions.Hence, the transmission energy dissipated by a CH at a givenround, on average, can be written as
ECH =(NTOT
N + 1− 1
)(EAPPT + b d α
CH-S
)︸ ︷︷ ︸
Non-CH packets
+(EAPPT + b d α
CH-S
)︸ ︷︷ ︸Own packet
+(EAPPT + b d α
broadcast
)︸ ︷︷ ︸Broadcast packet
+(PAPPS · T
)︸ ︷︷ ︸Sensing
,
(A.4)
where dCH-S is the distance between the CH and the externalsink, dbroadcast is the distance between the CH and the farthestpoint of the observed area, EAPPT = z PAPPT /Rbc is the energyspent by the block APPT during a packet transmission, and bis a constant that takes into account transmission parametersfc, Gant, PRmin, and so forth, according to (17). Finally, T isthe sensing period, which is set to TACT. So, contrary to theLEACH B protocol, we take into consideration also the en-ergy spent for sensing, obtaining a more realistic evaluationof N .
Each non-CH node only has to transmit its packet to theCH or to the sink and so the energy dissipated for each roundis
Enon-CH→CH = EAPPT + b dα
p-CH + PAPPS · T , (A.5)
where dp-CH is the distance between the pth node and theCH. Moreover,
Enon-CH→S = EAPPT + b dα
p-S + PAPPS · T , (A.6)
where dp-S is assumed equal to Dmax, which represents theworst case.
In many practical scenarios, the energy spent in the blockAPPT in (A.4), (A.5), and (A.6) can be neglected, that is,EAPPT bDα for every distance D.
As developed in [10], the expected squared distance froma general node p to the CH is given on average by
E[d2
p-CH
]= M2
2πN, (A.7)
so that (A.5) can be approximated by
Enon-CH→CH PAPPS · T + b
(M√2πN
)α
. (A.8)

684 EURASIP Journal on Wireless Communications and Networking
Therefore, for each round, the total transmission energydissipated in the network is on average
ETOT =N(NTOT
N + 1bD α
max + b d αbroadcast + PAPPST
)
+ N(NTOT
N + 1− 1
)·(PAPPST + b
(M√2πN
)α)
+NTOT
N + 1·(PAPPST + bD α
max
);
(A.9)
however, considering that N NTOT and 1 N , (A.9) canbe approximated as
ETOT = N · (b d αbroadcast + PAPPS · T
)+NTOT
N
(bD α
max + PAPPS · T)
+ NTOT b
(M√2πN
)α
+ K ,
(A.10)
where K is a term that does not depend on N . At this point,the optimum number of CHs can be evaluated easily by set-ting the derivative of ETOT performed with respect to N tozero. We obtain
N2 · k0 = N1−α/2 · k1 + k2, (A.11)
where
k0 = b d αbroadcast + PAPPST ,
k1 = NTOT b α
2
(M√2π
)α,
k2 = NTOTPAPPST + NTOT bDα
max .
(A.12)
This equation can be solved only numerically. Note that eachnode can determine its own optimum number of CHs, owingto the fact that the values of the total number of nodes inthe network, the path loss exponent, the network size, thedistance considered in the transmission of broadcast packets,and TACT are contained in the trigger transmitted by the sink,so they are known by nodes. Note that N does not dependon the distance between the CH and the final sink, so thatdistance could not be known.
REFERENCES
[1] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci,“A survey on sensor networks,” IEEE Commun. Mag., vol. 40,no. 8, pp. 102–114, 2002.
[2] V. Rajaravivarma, Y. Yang, and T. Yang, “An overview of wire-less sensor network and applications,” in Proc. 35th Southeast-ern Symposium on System Theory (SSST ’03), pp. 432–436,Morgantown, WVa, USA, March 2003.
[3] M. Tubaishat and S. Madria, “Sensor networks: an overview,”IEEE Potentials, vol. 22, no. 2, pp. 20–23, 2003.
[4] C.-Y. Chong and S. P. Kumar, “Sensor networks: evolution,opportunities, and challenges,” Proc. IEEE, vol. 91, no. 8,pp. 1247–1256, 2003.
[5] X. Hong, K. Xu, and M. Gerla, “Scalable routing protocols formobile ad hoc networks,” IEEE Network, vol. 16, no. 4, pp. 11–21, 2002.
[6] P. Chen, B. O’Dea, and E. Callaway, “Energy efficient systemdesign with optimum transmission range for wireless ad hocnetworks,” in Proc. IEEE International Conference on Commu-nications (ICC ’02), vol. 2, pp. 945–952, New York, NY, USA,April–May 2002.
[7] A. Woo and D. Culler, “A transmission control scheme for me-dia access in sensor networks,” in Proc. ACM/IEEE Interna-tional Conference on Mobile Computing and Networking (Mo-biCom ’01), pp. 221–235, Rome, Italy, July 2001.
[8] S. Lindsey, C. Raghavendra, and K. M. Sivalingam, “Datagathering algorithms in sensor networks using energy met-rics,” IEEE Trans. Parallel Distrib. Syst., vol. 13, no. 9, pp. 924–935, 2002.
[9] W. B. Heinzelman, A. P. Chandrakasan, and H. Balakrishnan,“Energy-efficient routing protocols for wireless microsensornetworks,” in Proc. 33rd Hawaii International Conference onSystem Sciences (HICSS ’00), pp. 1–10, Maui, Hawaii, USA,January 2000.
[10] W. B. Heinzelman, A. P. Chandrakasan, and H. Balakrishnan,“An application-specific protocol architecture for wireless mi-crosensor networks,” IEEE Transactions on Wireless Communi-cations, vol. 1, no. 4, pp. 660–670, 2002.
[11] M. J. Handy, M. Haase, and D. Timmermann, “Low energyadaptive clustering hierarchy with deterministic cluster-headselection,” in Proc. 4th International Workshop on Mobile andWireless Communications Network (MWCN ’02), pp. 368–372,Stockholm, Sweden, September 2002.
[12] A. Conti and D. Dardari, “The effects of nodes spatial distri-bution on the performance of wireless sensor networks,” inProc. IEEE 59th Vehicular Technology Conference (VTC ’04),vol. 5, pp. 2724–2728, Milan, Italy, May 2004.
[13] R. Verdone, “An energy-efficient decentralised communica-tion protocol for a network of uniformly distributed sensorspolled by a wireless transceiver,” in Proc. IEEE InternationalConference on Communications (ICC ’04), vol. 6, pp. 3491–3498, Paris, France, June 2004.
[14] Y. Zhang and L. Cheng, “Cross-layer optimization for sensornetworks,” in Proc. New York Metro Area Networking Workshop(NYMAN ’03), New York, NY, USA, September 2003.
[15] M. Conti, G. Maselli, G. Turi, and S. Giordano, “Cross-layering in mobile ad hoc network design,” IEEE Computer,vol. 37, no. 2, pp. 48–51, 2004.
[16] A. Safwat, H. Hassanein, and H. Mouftah, “Optimal cross-layer designs for energy-efficient wireless ad hoc and sen-sor networks,” in Proc. IEEE 22nd International Performance,Computing, and Communications Conference (IPCCC ’03), pp.123–128, Phoenix, Ariz, USA, April 2003.
[17] L.-C. Wang and C.-W. Wang, “A cross-layer design of cluster-ing architecture for wireless sensor networks,” in Proc. IEEEInternational Conference on Networking, Sensing and Con-trol (ICNSC ’04), vol. 1, pp. 547–552, Taipei, Taiwan, China,March 2004.
[18] A. De Pedri, A. Zanella, and R. Verdone, “An energy efficientprotocol for wireless ad hoc sensor networks,” in Proc. Au-tonomous Intelligent Networks and Systems (AINS ’03), MenloPark, Calif, USA, June–July 2003.

Cross-Layer Design of an Energy-Efficient Cluster Formation Algorithm 685
[19] K. Sohrabi, J. Gao, V. Ailawadhi, and G. J. Pottie, “Protocolsfor self-organization of a wireless sensor network,” IEEE Pers.Commun., vol. 7, no. 5, pp. 16–27, 2000.
[20] W. Ye, J. Heidemann, and D. Estrin, “An energy-efficient MACprotocol for wireless sensor networks,” in Proc. 21st AnnualJoint Conference of the IEEE Computer and CommunicationsSocieties (INFOCOM ’02), vol. 3, pp. 1567–1576, New York,NY, USA, June 2002.
[21] C. Buratti, A. Giorgetti, and R. Verdone, “Simulation of an en-ergy efficient carrier sensing multiple access protocol for clus-tered wireless sensor networks,” in Proc. International Work-shop on Wireless Ad-Hoc Networks (IWWAN ’04), Oulu, Fin-land, June 2004.
[22] OMNeT++: Objective Modular Network Testbed in C++,http://www.omnetpp.org.
[23] IEEE 802.11, “Standard for Wireless LAN Medium AccessControl (MAC) and Physical Layer (PHY) Specifications,”IEEE Std 820.11-1997 edition, The Institute of Electrical andElectronics Engineers, New York, NY, USA, 1997.
[24] J. N. Al-Karaki and A. E. Kamal, “Routing techniques in wire-less sensor networks: a survey,” IEEE Wireless Communica-tions, vol. 11, no. 6, pp. 6–28, 2004.
[25] M. Chatterjee, S. K. Das, and D. Turgut, “WCA: a weightedclustering algorithm for mobile ad hoc networks,” ClusterComputing, vol. 5, no. 2, pp. 193–204, 2002, Special Issue onMobile Ad Hoc Networking.
[26] S. Basagni, “Distributed clustering for ad hoc networks,”in Proc. 4th International Symposium on Parallel Architec-tures, Algorithms, and Networks (I-SPAN ’99), pp. 310–315, Perth/Fremantle, Western Australia, Australia, June1999.
[27] J. G. Proakis, Digital Communications, McGraw-Hill, NewYork, NY, USA, 3rd edition, 1995.
Chiara Buratti was born in Ravenna, Italy,on October 30, 1976. She received the M.S.degree (summa cum laude) in telecommu-nication engineering from the University ofBologna, Italy, in 2003. Her research inter-est is on wireless sensor networks, with par-ticular attention to MAC, routing, and con-nectivity issues, but she is also interested inBluetooth and ZigBee networks. Since 2003,she has been involved in Network of Excel-lence in Wireless COMmunications (NEWCOM), the NoE bornwithin the Sixth Framework Program of the EC, and, in particu-lar, she has been working on Project A, dedicated to wireless ad hocand sensor networks.
Andrea Giorgetti was born in Cesena, Italy,on November 5, 1974. He received the Lau-rea degree in electronic engineering (withhonors) and the Ph.D. degree in electronicengineering and computer science from theUniversity of Bologna, Bologna, Italy, in1999 and 2003, respectively. In 2003, hejoined IEIIT-BO/CNR where he became aresearcher in 2005. His research interests in-clude ultra-wideband systems, wireless sen-sor networks, and MIMO systems. He is a Member of IEEE.
Roberto Verdone was born in Bologna,Italy, in 1965. He received the Laurea de-gree in electronic engineering (with honors)and the Ph.D. degree in electronic engineer-ing and computer science from the Univer-sity of Bologna, Bologna, Italy, in 1991 and1995, respectively. From 1996 to 2001, hewas a researcher with the Centre for Stud-ies in Computer Science and Telecommu-nication Systems of the National ResearchCouncil (CSITE-CNR), University of Bologna, studying telecom-munications. Since November 2001, he has been a Full Professor oftelecommunications with the University of Bologna. His researchactivity is concerned with digital transmission, cellular and mo-bile radio systems, wireless local area networks, wireless sensor net-works, and intelligent transportation systems. From 1997 to 2000,he participated in COST259 activities and acted as a coauthor ofthe COST259 Final Report. He is the Chairman of the WG on net-work aspects within the followup action COST273, and he is a Na-tional Delegate for the action. He is a Member of IEEE and Exec-utive Board Member of NEWCOM, the Network of Excellence inWireless COMmunications funded by EC through FP6.

EURASIP Journal on Wireless Communications and Networking 2005:5, 686–697c© 2005 C.-Y. Wen and W. A. Sethares
Automatic Decentralized Clusteringfor Wireless Sensor Networks
Chih-Yu WenDepartment of Electrical and Computer Engineering, University of Wisconsin-Madison, 1415 Engineering Drive,WI 53706-1691, USAEmail: [email protected]
William A. SetharesDepartment of Electrical and Computer Engineering, University of Wisconsin-Madison, 1415 Engineering Drive,WI 53706-1691, USAEmail: [email protected]
Received 6 June 2004; Revised 28 March 2005
We propose a decentralized algorithm for organizing an ad hoc sensor network into clusters. Each sensor uses a random waitingtimer and local criteria to determine whether to form a new cluster or to join a current cluster. The algorithm operates withouta centralized controller, it operates asynchronously, and does not require that the location of the sensors be known a priori. Sim-plified models are used to estimate the number of clusters formed, and the energy requirements of the algorithm are investigated.The performance of the algorithm is described analytically and via simulation.
Keywords and phrases: wireless sensor networks, clustering algorithm, random waiting timer.
1. INTRODUCTION
Unlike wireless cellular systems with a robust infrastructure,sensors in an ad hoc network may be deployed without in-frastructure, which requires them to be able to self-organize.Such sensor networks are self-configuring distributed sys-tems and, for reliability, should also operate without cen-tralized control. In addition, because of hardware restrictionssuch as limited power, direct transmission may not be estab-lished across the complete network. In order to share infor-mation between sensors which cannot communicate directly,communication may occur via intermediaries in a multihopfashion. Scalability and the need to conserve energy lead tothe idea of organizing the sensors hierarchically, which canbe accomplished by gathering collections of sensors into clus-ters. Clustering sensors are advantageous because they
(i) conserve limited energy resources and improve energyefficiency,
(ii) aggregate information from individual sensors and ab-stract the characteristics of network topology,
(iii) provide scalability and robustness for the network.
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
This paper proposes a decentralized algorithm for orga-nizing an ad hoc sensor network into clusters. Each sensoroperates independently, monitoring communication amongothers. Those sensors which have many neighbors that arenot already part of a cluster are likely candidates for creatinga new cluster by declaring themselves to be a new “cluster-head.” The clustering algorithm via waiting timer (CAWT)provides a protocol whereby this can be achieved and theprocess continues until all sensors are part of a cluster. Be-cause of the difficulty of the analysis, simplified models areused to study and abstract its performance. A simple formulafor estimating the number of clusters that will be formed inan ad hoc network is derived based on the analysis, and theresults are compared to the behavior of the algorithm in anumber of settings.
2. LITERATURE REVIEW
Several clustering algorithms have been proposed in recentyears [1, 2, 3, 4, 5, 6, 7, 8, 9, 11, 12, 13, 14, 15, 16, 17, 22].Many of the algorithms are heuristics intended to minimizethe number of clusters. Some of the algorithms organize thesensors into clusters while minimizing the energy consump-tion needed to aggregate information and communicate theinformation to the base station. Perhaps the earliest of theclustering methods is the identifier-based heuristic called the

Automatic Decentralized Clustering for Wireless Sensor Networks 687
linked cluster algorithm (LCA) [5], which elects sensor to bea clusterhead if the sensor has the highest identification num-ber among all sensors within one hop of its neighbors. Theconnectivity-based heuristic of [6, 8] selects the sensors withthe maximum number of 1-hop neighbors (i.e., highest de-gree) to be clusterheads.
The weighted clustering algorithm (WCA) [9] considersthe number of neighbors, transmission power, mobility, andbattery usage in choosing clusters. It limits the number ofsensors in a cluster so that clusterheads can handle the loadwithout degradation in performance. These clustering meth-ods rely on synchronous clocking for the exchange of in-formation among sensors which typically limits these algo-rithms to smaller networks [10].
The Max-Min D-cluster algorithm [1] generates D-hopclusters with a complexity of O(D) without time synchro-nization. It provides load balancing among clusterheads inthe network. Simulation results suggest that this heuristic issuperior to the LCA and connectivity-based solutions.
The low-energy adaptive clustering hierarchy (LEACH)of [11] utilizes randomized rotation of clusterheads to bal-ance the energy load among the sensors and uses localizedcoordination to enable scalability and robustness for clus-ter set-up and operation. LEACH-C (centralized) [12] uses acentralized controller. The main drawbacks of this algorithmare nonautomatic clusterhead selection and the requirementthat the position of all sensors must be known. LEACH’sstochastic algorithm is extended in [13] with a deterministicclusterhead selection. Simulation results demonstrate that anincrease of network lifetime can be achieved compared withthe original LEACH protocol. In [14], the clustering is drivenby minimizing the energy spent in wireless sensor networks.The authors adopt the energy model in [11] and use the sub-tractive clustering algorithm and fuzzy C-mean (FCM) algo-rithm to form clusters. Although the above algorithms care-fully consider the energy required for clustering, they are notextensively analyzed (due to their complexity) and there isno way of estimating how many clusters will form in a givennetwork.
The ad hoc network design algorithm (ANDA) [15] max-imizes the network lifetime by determining the optimal clus-ter size and the optimal assignment of sensors to clusterheadsbut requires a priori knowledge of the number of cluster-heads, number of sensors in the network, and the locationof all sensors.
The distributed algorithm in [3] groups sensors into ahierarchy of clusters while minimizing the energy consump-tion in communicating information to the base station. Theyuse the results provided in [18] to obtain optimal parametersof the algorithm and analyze the number of clusterheads ateach level of clustering.
Most of these design approaches are deterministic pro-tocols in which each sensor must maintain knowledge of thecomplete network [12, 15] or identify a subset of sensors witha clusterhead to partition the network into clusters in heuris-tic ways [1, 2, 4, 5, 6, 7, 8, 9, 22]. The algorithms proposed in[11, 12, 13, 14] focus on reducing the energy consumptionwithout exploring the number of clusters generated by the
protocols, though [1, 9] demonstrate the average number ofclusterheads via simulations. For most of the algorithms, noanalysis of the number of clusters is available.
The method of this paper is a randomized distributed al-gorithm in which each sensor uses a random waiting timerand local criteria to decide whether to be a clusterhead. Thealgorithm operates without a centralized controller, it oper-ates asynchronously and does not require that the location ofthe sensors be known. Based on simplified models, an esti-mate of the number of clusterheads and a simple predictionformula are derived to approximate and describe the behav-ior of the proposed algorithm. To examine the energy usageof the algorithm, the result provided in [19] is used to in-vestigate situations where the minimum transmission rangeensures that the network have a strong connectivity. The per-formance of the algorithm is investigated both by simulationand analysis.
3. THE CLUSTERING ALGORITHM VIA WAITING TIMER
This section describes a randomized distributed algorithmthat forms clusters automatically in an ad hoc network. Themain assumptions are
(i) all sensors are homogeneous with the same transmis-sion range,
(ii) the sensors are in fixed but unknown locations; thenetwork topology does not change,
(iii) symmetric communication channel: all links betweensensors are bidirectional,
(iv) there are no base stations to coordinate or super-vise activities among sensors. Hence, the sensors mustmake all decisions without reference to a centralizedcontroller.
Each active sensor broadcasts its presence via a “Hello”signal and listens for its neighbor’s “Hello.” The sensors thathear many neighbors are good candidates for initiating newclusters; those with few neighbors should choose to wait. Byadjusting randomized waiting timers, the sensors can coordi-nate themselves into sensible clusters, which can then be usedas a basis for further communication and data processing.
After deployment, each sensor sets a random waitingtimer. If the timer expires, then the sensor declares itself tobe a clusterhead, a focal point of a new cluster. However,events may intervene that cause a sensor to shorten or can-cel its timer. For example, whenever the sensor detects a newneighbor, it shortens the timer. On the other hand, if a neigh-bor declares itself to be a clusterhead, the sensor cancels itsown timer and joins the neighbor’s new cluster.
Assume the initial value of the waiting time of sensor i,
WT(0)i , is a sample from the distribution C+α·U(0, 1), where
C and α are positive numbers, and U(0, 1) is a uniform dis-tribution. In the clustering phase of the network, each sen-sor broadcasts a Hello message at a random time. This allowseach sensor to estimate how many neighbors it has. A Hellomessage consists of (1) the sensor ID of the sending sensor,and (2) the cluster ID of the sending sensor. At the begin-ning, the cluster ID of each sensor is zero. Note that a sensor

688 EURASIP Journal on Wireless Communications and Networking
(1) Each sensor initializes a random waiting timer with a value WT (0)i .
(2) Each sensor transmits the Hello message at random times:draw a sample r from the distribution λ ·WT (0)
i ·U(0, 1), where 0 < λ <0.5,wait r time units and then transmit the Hello.
(3) Establish and update the neighbor identification:if a sensor receives a message of assigning a cluster ID at time step k
(a) join the corresponding cluster,(b) draw a sample r′ from the distribution WT (k)
i ·U(0, 1),(c) wait r′ time units and then send an updated Hello message with
the new cluster ID,(d) stop the waiting timer. (Stop!)
elsecollect neighboring information.
end(4) Decrease the random waiting time according to (1).(5) Clusterhead check:
if WTi = 0 and the neighboring sensors are not in another cluster(a) broadcast itself to be a clusterhead,(b) assign the neighboring sensors to cluster ID i. (Stop!)
elseif WTi = 0 and some of the neighboring sensors are in other clustersjoin any nearby cluster after τ seconds, where τ is greater than anypossible waiting time. (Stop!)
elsego to step (3).
end
Algorithm 1: The CAWT: an algorithm for segmenting sensors into clusters.
ID is not needed to be unambiguously assigned to each sen-sor before applying the CAWT. The following are two possi-ble ways for each sensor to determine its sensor ID: (1) eachsensor can automatically know an ID number (like an IP ad-dress or an RFID tag), and (2) each sensor could pick a ran-dom number when it first turns on, which is a “random” IDassignment. If the range of numbers is large compared to thenumber of sensors, then it is unlikely that two sensors (withinradio range) would pick the same number.
Sensors update their neighbor information (i.e., acounter specifying how many neighbors it has detected) anddecrease the random waiting time based on each “new” Hellomessage received. This encourages those sensors with manyneighbors to become clusterheads. The updating formula forthe random waiting time of sensor i is
WT(k+1)i = β ·WT(k)
i , (1)
where WT(k)i is the waiting time of sensor i at time step k and
0 < β < 1.If both of the following conditions apply, then sensor i
declares itself a clusterhead:
(i) the random waiting timer expires, that is, WTi = 0;(ii) none of the neighboring sensors are already members
of a cluster.
If sensor i satisfies the above conditions, it broadcasts a mes-sage proclaiming that it is beginning a new cluster; this alsoserves to notify its neighbors that they are assigned to join the
new cluster with ID i. When a sensor joins the cluster, it sendsan updated Hello message and stops its waiting timer. Thecomplete procedure of the initialization phase is outlined inthe CAWT of Algorithm 1.
After applying the CAWT, there are three different kindsof sensors: (1) the clusterheads, (2) sensors with an assignedcluster ID, and (3) sensors which are unassigned. These unas-signed sensors may join the nearest cluster later dependingon the neighboring information or the demand of specificapplications, such as sensor location estimation problem.Thus, the topology of the ad hoc network is now representedby a hierarchical collection of clusters.
4. SIMPLIFIED METHODS OF CLUSTERING
Because of the complexity of the CAWT, it is difficult to eval-uate the algorithm directly other than via simulation. Sincethe connectivity among sensors and the number of neighbor-ing sensors play important roles in the CAWT, it is reasonableto investigate the performance from the perspective of theseparameters. Therefore, we abstract the behavior of the algo-rithm using two simplified models which approximate thedesired global behavior and serve to analyze its performance.
4.1. The neighboring density model
The first simplified model is the neighboring density model(NDM) which is detailed in Algorithm 2. The basic idea ofNDM is to suppose that the probability of each sensor of be-ing a clusterhead, pi, is proportional to the number of the

Automatic Decentralized Clustering for Wireless Sensor Networks 689
(a) Assign a probability to sensor i, pi, proportional to the number of theneighboring sensors, Ni. That is, pi ∝ Ni/
∑ni=1 Ni.
(b) Let Bi be the set of neighboring sensors of sensor i.I is the index set of clusterheads.
(c) P(k), P(k)
, and P(k) are 1 by n vectors to store the probability distributionat time step k.
(d) Assign k = 0 and P(0) = (p1, p2, . . . , pn).while sum(P(k)) > 0(1) Select a clusterhead
if j = arg maxip(k)i
j ∈ I ,end
(2) Update the probability distribution
pi(k) = p(k)
i · 1i /∈Bj , Bi∩Bj=∅, j=arg maxip(k)i ,
p j(k) = 0.
(3) Normalize the updated probability distribution.if sum(P(k)) > 0
pi(k) = pi
(k)/ sum(P(k)).
elseP
(k) = P(k).end
(4) Store the normalized probability distribution.
P(k) = P(k)
,set k = k + 1.
end
Algorithm 2: The neighboring density model: a procedure for analyzing the CAWT.
neighboring sensors, Ni. That is,
pi ∝ Ni∑ni=1 Ni
. (2)
If the sensor is not already chosen as a clusterhead andits neighboring sensors are not already in other clusters, thenthe sensor with the largest pi is chosen to be a clusterhead andit assigns probability 0 to its neighbors. Thus, a sensor be-comes a clusterhead if it has the highest neighboring densityamong all sensors which have not yet become cluster mem-bers. Moreover, if a sensor is not a member of a cluster andsome of its neighbors have already become cluster members,this sensor should choose to wait and join the nearest clusterlater. After normalizing the updated probability distributionof sensors, the procedure repeats until all sensors are mem-bers of a cluster. The rationale for this choice is that, if therandom waiting time of each sensor is long enough (in thesense that each sensor is able to collect sufficient neighboringinformation), then the model is likely to closely approximatethe behavior of the CAWT on any given ad hoc network. Theclose connection between the model and the algorithm is ex-plored via simulation.
4.2. The averaged model
This subsection models the CAWT by a simplified averagingprocedure. Assume that a single clusterhead and an averagenumber of neighboring sensors E(k)[Ni] are removed duringeach iteration k. Assume that each sensor will be removed
with probability p(k)rm = rk/mk, where rk is the number of sen-
sors to be removed and mk is the number of sensors remain-ing at iteration k. Denote the collection of sensors at itera-tion k by Vk. Since a clusterhead and its neighboring sensorsare removed at each iteration, the collection of sensors at thenext iteration, Vk+1, is simply a new and smaller network.Theorem 1 can be applied to approximate the distribution ofthe number of clusterheads at iteration k by N (µk, σ2
k ), where
µk =∑mk
i=1 p(k)i , σ2
k =∑mk
i=1 p(k)i (1 − p(k)
i ), mk is the number
of sensors in Vk, p(k)i is the updated probability distribution
of sensors at iteration k, i ∈ Ik, and Ik is the index set of sen-sors at iteration k. Once the procedure terminates, the num-ber of iterations is an estimate of the number of clusterheadsformed in the network. A statement of the averaged model Iis given in Algorithm 3.
4.3. Analysis of the averaged model
This section analyzes the averaged model of Algorithm 3 andderives a simple expression for the expected number of clus-terheads in a given network. Later sections show via sim-ulation that this is also a reasonable estimate of the num-ber of clusterheads given by the implementable CAWT ofAlgorithm 1.
4.3.1. The Lindeberg theorem
This section reviews the probability that is used when analyz-ing the performance of the model. Readers may see [20] fora complete discussion and proof of the theorem.

690 EURASIP Journal on Wireless Communications and Networking
(a) Let N (k)b be the sum of neighboring sensors at iteration k.
N (k)b =∑mk
i=1 N(k)i .
i ∈ Ik ; Ik is the index set of sensors at iteration k.(b) Let E(k)[Ni] be the average number of neighbors at iteration k.(c) Assign the probability p(k)
i to sensor i, proportional to the number of
neighboring sensors, N (k)i . That is, p(k)
i ∝ N (k)i /N (k)
b .(d) Assign k = 0, m0 = n, r0 = 0.
while (mk − rk) > 0rk = E(k)[Ni]∗ + 1,mk+1 = mk − rk ,k = k + 1.
end∗· is the ceiling function.
Algorithm 3: Averaged model I: procedure for analyzing the CAWT.
Suppose for each n that
(X11,X12, . . . ,X1r1
),(
X21,X22, . . . ,X2r2
),
...(Xn1,Xn2, . . . ,Xnrn
)(3)
are independent random vectors. The probability space maychange with n. Put Sn = Xn1 + · · · + Xnrn . In the networkapplication, rn = n, Xni = Xi, 0, and (3) is called a triangu-lar array of random variables. Let Xi take the values 1 and 0with probability pi and qi = 1 − pi. We may interpret Xi asan indicator that sensor i is chosen to be a clusterhead withprobability pi and Sn is the number of clusters in the network.
Denote Yi = Xi − pi. Hence,
SYn ≡n∑i=1
Yi =n∑i=1
Xi −n∑i=1
pi = Sn −n∑i=1
pi,
E[Yi] = E
[Xi]− pi = 0,
σ2Yi= σ2
Xi= pi
(1− pi
),
s2n =
n∑i=1
σ2Yi=
n∑i=1
σ2Xi=
n∑i=1
pi(1− pi
).
(4)
For our case, the Lindeberg condition [20] reduces to
limn→∞
n∑i=1
1s2n
∫|Yi|≥εsn
Y 2i dP ≤ lim
n→∞
n∑i=1
1s2n
∫|Yi|≥εsn
dP = 0, (5)
which holds because all the random variables are boundedby 1 and [|Yi| ≥ εsn] → 0 as n→∞.
Theorem 1. Suppose that Yi is an independent sequence ofrandom variables and satisfies E[Yi] = 0, σ2
Yi= E[Y 2
i ],SYn =
∑ni=1 Yi, and s2
n =∑n
i=1 σ2Yi
. If the Lindeberg condition(5) holds, then SYn /sn → N (0, 1).
By Theorem 1, the distribution of the number of clusterscan be approximated by N (
∑ni=1 pi, s
2n) since E[Sn] = E[SYn ]+∑n
i=1 pi =∑n
i=1 pi and∑n
i=1 σ2Xi=∑n
i=1 σ2Yi= s2
n.
4.3.2. Special case
Assume that n sensors are deployed in a circle and the dis-tance between each pair of neighboring sensors is equal. Inaddition, because of the radio range, assume that each sen-sor can detect two neighboring sensors. Hence each sensormay be chosen as a clusterhead with probability pi = 1/n.As mentioned before, let Xi be the indicator that sensor i ischosen to be a clusterhead with probability pi and let Sn bethe number of clusterheads in the network. Based on theseassumptions, the expectation and variance of Sn are
E[Sn] = n∑
k=1
kPr(Sn = k
) = npi,
s2n =
n∑i=1
σ2Xi= npi
(1− pi
).
(6)
4.3.3. Analysis
This section shows that, with appropriate simplification, theaveraged model (AM) can be used to make simple predictionof the behavior of the CAWT.
To obtain the mean and variance of the number of clus-terheads of each iteration, the probability distribution ofthese random variables must be updated. However, it is not
simple to calculate p(k)i at each iteration since the process of
selecting a clusterhead at each iteration is complex. The fol-lowing simplified analysis restructures the connectivity of thenetwork so that each sensor has the same average neighbor-ing density at each iteration. Therefore, we have
E(k+1)[Ni] = N (k)
b − rk · E(k)[Ni]
mk+1. (7)
This simplified averaged model is summarized in averagedmodel II in Algorithm 4.

Automatic Decentralized Clustering for Wireless Sensor Networks 691
(a) Let N (k)b be the sum of neighboring sensors of sensors at iteration k.
N (k)b =∑mk
i=1 N(k)i .
i ∈ Ik ; Ik is the index set of sensors at iteration k.
(b) Let E(k)[Ni] be the average number of neighbors at iteration k.
E(0)[Ni] = N (0)b /m0.
(c) Assign the probability p(k)i to sensor i, proportional to the number of
neighboring sensors, N (k)i . That is, p(k)
i ∝ N (k)i /N (k)
b .
(d) Assign k = 0, m0 = n, r0 = 0.while (mk − rk) > 0
mk+1 = mk − rk ,E(k+1)[Ni] = (N (k)
b − rk · E(k)[Ni])/mk+1,rk+1 = E(k+1)[Ni]∗ + 1,k = k + 1.
end∗· is the ceiling function.
Algorithm 4: Averaged model II: procedure for analyzing the CAWT.
Thus, the distribution of the number of clusterheads canbe approximated by N(µch, σ2
ch), where
µch =Nit∑k=1
µk =Nit∑k=1
mk∑i=1
p(k)i ,
σ2ch =
Nit∑k=1
σ2k =
Nit∑k=1
mk∑i=1
p(k)i
(1− p(k)
i
),
(8)
where Nit is the number of iterations.Moreover, suppose that the expectation of the number of
neighboring sensors of each sensor in the network is used toapproximate the number of neighboring sensors that will beremoved at each iteration (i.e., the sensors which will even-tually join the new cluster). Thus,
E(k)[Ni] = E
[Ni] = 1
n
n∑i=1
Ni, ∀k. (9)
Then
rk =⌈E[Ni]⌉
+ 1, (10)
and a simple formula for predicting the number of cluster-heads is
Nch = n⌈E[Ni]⌉
+ 1. (11)
The comparison of the performance of the CAWT andthe simplified models will be illustrated in Section 6.
5. ANALYSIS OF ENERGY CONSUMPTION
This section considers the energy consumption of the CAWTassuming homogenous sensors. The total power require-ments include both the power required to transmit mes-sages and the power required to receive (or process) mes-sages.
In the initialization phase, each sensor broadcasts a Hellomessage to its neighboring sensors. Therefore, the numberof transmissions NTx is equal to the number of sensors in thenetwork, n, and the number of receptions NRx is the sum ofthe neighboring sensors of each sensor. That is,
NTx = n, NRx =n∑j=1
Nj. (12)
As a sensor, say sensor i, meets the conditions of being aclusterhead, it broadcasts this and assigns cluster ID i to itsneighboring sensors. Its neighboring sensors then transmita signal to their neighbors to update cluster ID information.During this clustering phase, (1+Ni) transmissions and (Ni+∑
j∈CiNj) receptions are executed, where Ci is the index set
of neighboring sensors of sensor i. This procedure is appliedto all clusterheads and their cluster members. Now let Nc
Tx
and NcRx
denote the number of transmissions and receptionsfor all clusters, respectively. Hence,
NcTx=∑i∈I
(1 + Ni
),
NcRx=∑i∈I
( ∑j∈Ci
Nj + Ni
),
(13)
where I is a index set of clusterheads. Therefore, the totalnumber of transmissions NT and the number of receptions

692 EURASIP Journal on Wireless Communications and Networking
1
00 1
(a)
1
00 1
(b)
1
00 1
(c)
Figure 1: Clusters are formed in a random network of 50 sensors with (a) R/l = 0.15, (b) R/l = 0.2, and (c) R/l = 0.25.
NR are
NT = NTx + NcTx= n +
∑i∈I
(1 + Ni
),
NR = NRx + NcRx=
n∑j=1
Nj +∑i∈I
( ∑j∈Ci
Nj + Ni
).
(14)
Suppose that the energy needed to transmit is ET , whichdepends on the transmitting range R, and the energy neededto receive is ER. From (14), the total energy consumption,Etotal, for cluster formation in the wireless sensor network is
Etotal = NT · ET + NR · ER. (15)
Observe that the above analysis is suitable for any trans-mitting range. However, overly small transmission rangesmay result in isolated clusters whereas overly large trans-mission ranges may result in a single cluster. Therefore, inorder to optimize energy consumption and encourage link-ing between clusters, it is sensible to consider the mini-mum transmission power (or range R) which will result ina fully connected network. This range assignment problemis investigated in [19], which proposes lower boundson the
magnitude of Rdn (with respect to l), Rdn ∈ O(ld), andshows that Rdn ≈ ld ln(l) may be a good initial value for thesearch of optimized range assignment strategies to providea high probability of connectivity. As usual, n is the num-ber of sensors and l is the length of sides of a d-dimensionalcube. The performance of the total energy consumption ofthe CAWT with different selections of R is examined via sim-ulation.
6. SIMULATION RESULTS
The simulations of this section examine the performance ofthe CAWT and validate the simplified models for which ana-lytical results have been derived.
Assume that n sensors are uniformly distributed over asquare region in a two-dimensional space. Parameters for therandom waiting timer, number of sensors, and ratio of trans-mitting range R to the side length l of the square, R/l, are in-vestigated to provide a simulation-based study of the CAWT.Note that the entire experiments are conducted in a squareregion with side length l = 1000 unit length.
The first set of experiments examines the variation of theaverage number of clusterheads with respect to the ratio R/l.With random waiting time parameters C = 100, α = 10, and

Automatic Decentralized Clustering for Wireless Sensor Networks 693
0.1 0.15 0.2 0.25 0.3 0.35
R/l
0
5
10
15
20
25
30A
vera
gen
um
ber
ofcl
ust
erh
eads
n = 25n = 50n = 75n = 100
Figure 2: Average number of clusterheads as a function of the ratioR/l.
β = 0.9, Figure 1 depicts typical runs of the algorithm basedon the same network topology but with different R/l ratios.The results show that each cluster is a collection of sensorswhich are up to 2 hops away from a clusterhead. Figure 2shows the relationship between the average number of clus-terheads and the R/l ratio with varying the number of sen-sors. The average number of clusterheads in each case is thesample mean of the results of 200 typical runs. Observe thatthe average number of clusterheads decreases as the ratio R/lincreases (i.e., the transmission power increases). Since largertransmission power allows larger radio coverage, a cluster-head has more cluster members, which reduces the numberof clusters in the network. Figure 2 also shows that when thetransmission range is small, the network with a lower sensordensity will have a larger percentage of isolated sensors whicheventually become clusterheads in their own right. This isbecause the network is only weakly connected with these val-ues. On the other hand, when the transmission power is largeenough to ensure strong connectivity of the network, the av-erage number of clusterheads stabilizes as the number of sen-sors increases.
The second set of experiments in Figure 3 evaluatesthe performance of the neighboring density model (NDM),which compares cluster formation when using the NDM andthe CAWT. The outputs of the two methods are not identi-cal due to the randomness of the waiting timer. Nonetheless,both these clustering structures are qualitatively similar giventhe same network settings, suggesting that the NDM providesa good approximation to the CAWT.
The third set of experiments compares the estimatesof the number of clusterheads when applying the CAWT,the neighboring density model (NMD), the averaged model(AM), and the prediction formula. In each method, the re-sults of 200 typical runs are merged. For the CAWT, the
NDM, and the prediction formula cases, the estimates ofthe number of clusterheads are given by the sample meanand sample variance of the results of typical runs. For theAM case, the estimates of mean and variance of the num-ber of clusterheads are generated in each typical run, whichmeans the best estimate may not be obtained by averagingthe typical runs. The covariance intersection (CI) method of[21] provides the best estimate given the information avail-able. The CI algorithm takes a convex combination of meanand covariance estimates that are represented in informationspace. Since these typical runs are independent, the cross-correlations between these estimates are 0. Therefore, thegeneral form is
P−1cc = ω1P
−1a1a1
+ · · · + ωnP−1anan ,
P−1cc c = ω1P
−1a1a1
a1 + · · · + ωnP−1ananan,
(16)
where∑n
i=1 ωi = 1, n > 2, ai is the estimate of the meanfrom available information, Paiai is the estimate of the vari-ance from available information, c is the new estimate of themean, and Pcc is the new estimate of the variance. We chooseto weight each typical run equally.
In order to compare the CAWT and the simplified mod-els, Figures 4a and 4b show the standard deviation of themean number of clusterheads. The plots vary the numberof sensors n and the transmission power R/l. Also shownin Figures 4c and 4d are the confidence intervals for themean number of clusterheads at a 90% confidence level. Thegraphs suggest that the NDM approximates the CAWT some-what better than the AM. This is reasonable because theNDM retains global connectivity information while the AMuses only the average density information. Though the NDMoutperforms AM, these results provide evidence that the AMprovides a way to roughly predict the performance of theCAWT.
The fourth set of experiments considers the total energyconsumption of the CAWT. Assume that the communicationchannel is error-free. Since each sensor does not need to re-transmit any data, two transmissions are executed, one forbroadcasting the existence and the other for assigning a clus-ter ID to its cluster members or updating the cluster ID in-formation of its neighbors. Hence, the total number of trans-missions is 2n. Under these circumstances, sensor i will re-ceive 2Ni messages. Then, the total number of receptions is2∑n
i=1 Ni. Figures 5 and 6 show the average number of trans-missions and receptions of random networks after applyingthe proposed algorithm. Figure 6 also shows that the num-ber of receptions tends to increase as the ration R/l increases.This implies that energy consumption is higher for the net-work with larger transmission power. This can be attributedto the fact that larger transmission power allows sensors todetect more neighbors, which increases the number of recep-tions when assigning cluster ID or updating cluster ID infor-mation. Therefore, in order to minimize energy use and keepstrong connectivity in the network, an appropriate selectionof the transmission range R is essential. In [19], the authors

694 EURASIP Journal on Wireless Communications and Networking
1
00 1
(a)
1
00 1
(b)
1
00 1
(c)
1
00 1
(d)
Figure 3: Cluster formation in a random network with 100 sensors and (a) the CAWT with R/l = 0.15, (b) the NDM algorithm withR/l = 0.15, (c) the CAWT with R/l = 0.2, and (d) the NDM algorithm with R/l = 0.2.
suggest that
R ≈ ld
√log ln
(17)
may be a good choice for the initial range assignment forsensors in the d-dimensional space. Hence, if l = 1000 mand n = 100, then R ≈ 173.21 m. This means that forR/l ≈ 0.173, it may lead to a strongly connected network andenergy conservation.
The final set of experiments compares the cluster forma-tion when using the Max-Min D-cluster formation algorithm[1] and the new decentralized clustering algorithm with ran-dom waiting timer. The Max-Min heuristic generalizes theclustering heuristics so that a sensor is either a clusterhead orat most D hops away from a clusterhead. This heuristic hascomplexity of O(D) rounds which is better than most clus-tering algorithms in the literature (see [5, 6, 7, 8, 22]) withtime complexity of O(n), where n is the number of sensorsin the network. In the proposed CAWT, each sensor initiates2 rounds of local flooding to its 1-hop neighboring sensors,
one for broadcasting sensor ID and the other for broadcast-ing cluster ID, to select clusterheads and form 2-hop clus-ters. Hence, the time complexity is O(2) rounds. This impliesthat the CAWT and the Max-Min heuristic with D = 2 havethe same time complexity O(2). Thus the Max-Min heuristicwith D = 2 provides a good way to benchmark the perfor-mance of the CAWT.
As shown in Figure 2 and by the figures in [1], load bal-ancing may not be achieved without an appropriate trans-mission range since this may lead to either too large ortoo small cluster sizes. Hence, the cluster formation is ex-amined with respect to the R/l ratio and network den-sity suggested in (17) when using both the CAWT and theMax-Min heuristic. Figures 7 and 8 show that both theaverage number of the CAWT clusterheads and the Max-Min clusterheads increase approximately linearly with in-creased network density though the Max-Min heuristic hasmore clusterheads and slightly smaller cluster sizes thanthe CAWT. Figure 8 also demonstrates that a good selec-tion of transmission range may lead to a minimal varia-tion of the cluster size with increased network density. This

Automatic Decentralized Clustering for Wireless Sensor Networks 695
1 2 3 4
5
10
15
Nch
4
68
10
Nch
2
4
6
8
Nch
2
46
8
Nch
R/l = 0.175
R/l = 0.225
R/l = 0.275
R/l = 0.325
(a)
1 2 3 4
5
10
15
Nch
468
10
Nch
24
68
Nch
2
4
6
8
Nch
R/l = 0.175
R/l = 0.225
R/l = 0.275
R/l = 0.325
(b)
1 2 3 4
5
10
15
Nch
468
10
Nch
24
68
Nch
2
4
6
8
Nch
R/l = 0.175
R/l = 0.225
R/l = 0.275
R/l = 0.325
(c)
1 2 3 4
5
10
15
Nch
468
10
Nch
24
68
Nch
2
4
6
8
Nch
R/l = 0.175
R/l = 0.225
R/l = 0.275
R/l = 0.325
(d)
Figure 4: The number of clusterheads formed in a random network using (1) the CAWT, (2) NDM, (3) AM, and (4) the prediction formula,respectively, with varying R/l ratios. Parts (a) n = 50 and (b) n = 100 show the standard deviation over 200 runs. Parts (c) n = 50 and (d)n = 100 show the confidence intervals at the 90% level.
may help to achieve the load balance among the cluster-heads.
The above set of experiments imply that the CAWT iscompetitive with the Max-Min heuristic in terms of timecomplexity and cluster formation. The authors in [1] showthat the Max-Min heuristic may fail to provide a good clusterformation in some network configurations and more studyis needed to determine appropriate times to trigger the Max-Min heuristic. In comparison, the CAWT may be reliably ap-plied to any network topology and network density.
7. CONCLUSION
This paper has presented a randomized, decentralized algo-rithm for organizing the sensors of an ad hoc network into
clusters. A random waiting timer and a neighbor-based cri-teria were used to form clusters automatically. Two simpli-fied models are introduced for the purpose of understandingthe performance of the CAWT. Simulation results indicatedthat the simplified models agree well with the behavior ofthe algorithm. Under the assumption of fixed transmissionpower and homogenous sensors, the energy requirements ofthe method were determined.
There are several ways this work may be generalized.For a fixed clusterhead selection scheme, a clusterhead withconstrained energy may drain its battery quickly due to heavyutilization. In order to spread the energy usage over thenetwork and achieve a better load balancing among clus-terheads, reselection of the clusterheads may be a useful

696 EURASIP Journal on Wireless Communications and Networking
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
R/l
50
100
150
200
250A
vera
gen
um
ber
oftr
ansm
issi
ons
n = 125n = 100n = 75n = 50n = 25
Figure 5: The number of transmissions in random networks as afunction of the number of sensors and R/l ratio.
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
R/l
0
2000
4000
6000
8000
10 000
Ave
rage
nu
mbe
rof
rece
ptio
ns
n = 25n = 50n = 75n = 100
Figure 6: The number of receptions in random networks as a func-tion of the number of sensors and R/l ratio.
strategy. Also, if the sensors are moving slowly, then thealgorithm is flexible and cheap enough to be applied it-eratively as the network configuration changes. This canbe achieved by modifying the conditions under which therandom timing counter is incremented or decremented.From an adaptive cross-layer design perspective, the ran-dom timer may be adjusted using current channel conditions(signal-to-interference-and-noise ratio (SINR), link connec-tivity, etc.) and energy constraints (energy level of neighbor-ing sensors) from the physical layer. Moreover, the randomtimer may adapt based on the mobility of the sensor and theconstraints from the MAC layer to achieve network robust-ness and scalability. Therefore, such “adaptive clustering pro-
100 200 300 400 500
Number of sensors
10
20
30
40
50
Ave
rage
nu
mbe
rof
clu
ster
hea
ds
CAWTNDMAMMax-Min
Figure 7: The average number of clusterheads as a function of thenumber of sensors and R/l ratio using the CAWT (and the two sim-plified models) and the Max-Min heuristic. n = 100, R/l = 0.1732;n = 200, R/l = 0.1225; n = 300, R/l = 0.10; n = 400, R/l = 0.087;n = 500, R/l = 0.0775.
100 200 300 400 500
Number of sensors
9
10
11
12
13
Ave
rage
clu
ster
size
CAWTNDMAMMax-Min
Figure 8: The average cluster size with the same network settings asin Figure 7.
tocols” may provide a reliable method of cluster organizationfor wireless ad hoc sensor networks.
REFERENCES
[1] A. D. Amis, R. Prakash, T. H. P. Vuong, and D. T. Huynh,“Max-min d-cluster formation in wireless ad hoc networks,”in Proc. 19th IEEE Annual Joint Conference Computer andCommunications Societies (INFOCOM ’00), vol. 1, pp. 32–41,Tel Aviv, Israel, March 2000.
[2] A. D. Amis and R. Prakash, “Load-balancing clusters inwireless ad hoc networks,” in Proc. 3rd IEEE Symposium on

Automatic Decentralized Clustering for Wireless Sensor Networks 697
Application-Specific Systems and Software Engineering Technol-ogy, pp. 25–32, Richardson, Tex, USA, March 2000.
[3] S. Bandyopadhyay and E. J. Coyle, “An energy efficient hier-archical clustering algorithm for wireless sensor networks,” inProc. 22nd IEEE Annual Joint Conference of the IEEE Computerand Communications Societies ( INFOCOM ’03), vol. 3, pp.1713–1723, San Francisco, Calif, USA, March–April 2003.
[4] S. Basagni, “Distributed clustering for ad hoc networks,”in Proc. 4th International Symposium on Parallel Architec-tures, Algorithms, and Networks (I-SPAN ’99), pp. 310–315,Perth/Fremantle, WA, Australia, June 1999.
[5] D. Baker and A. Ephremides, “The architectural organizationof a mobile radio network via a distributed algorithm,” IEEETrans. Commun., vol. 29, no. 11, pp. 1694–1701, 1981.
[6] M. Gerla and J. T. C. Tsai, “Multicluster, mobile, multimediaradio networks,” Wireless Networks, vol. 1, no. 3, pp. 255–265,1995.
[7] A. Ephremides, J. E. Wieselthier, and D. J. Baker, “A designconcept for reliable mobile radio networks with frequencyhopping signaling,” Proc. IEEE, vol. 75, no. 1, pp. 56–73, 1987.
[8] A. K. Parekh, “Selecting routers in ad-hoc wireless networks,”in Proc. SBT/IEEE International Telecommunications Sympo-sium (ITS ’94), pp. 420–424, Rio-de-Janeiro, Brazil, August1994.
[9] M. Chatterjee, S. K. Das, and D. Turgut, “WCA: a weightedclustering algorithm for mobile ad hoc networks,” Journal ofCluster Computing, vol. 5, no. 2, pp. 193–204, 2002, SpecialIssue on Mobile Ad hoc Networking.
[10] J. Lundelius and N. Lynch, “An upper and lower boundfor clock synchronization,” Information and Control, vol. 62,no. 2/3, pp. 190–204, 1984.
[11] W. R. Heinzelman, A. Chandrakasan, and H. Balakrishnan,“Energy-efficient communication protocol for wireless mi-crosensor networks,” in Proc. 33rd Annual Hawaii Interna-tional Conference on System Sciences (HICSS ’00), vol. 2, Maui,Hawaii, USA, January 2000.
[12] W. R. Heinzelman, A. P. Chandrakasan, and H. Balakrishnan,“An application-specific protocol architecture for wireless mi-crosensor networks,” IEEE Transaction on Wireless Communi-cations, vol. 1, no. 4, pp. 660–670, 2002.
[13] M. J. Handy, M. Haase, and D. Timmermann, “Low energyadaptive clustering hierarchy with deterministic cluster-headselection,” in Proc. 4th IEEE International Workshop on Mobileand Wireless Communications Network (MWCN ’02), pp. 368–372, Stockholm, Sweden, September 2002.
[14] M. N. Halgamuge, S. M. Guru, and A. Jennings, “Energyefficient cluster formation in wireless sensor networks,” inProc. 10th IEEE International Conference on Telecommunica-tions (ICT ’03), vol. 2, pp. 1571–1576, Papeete, French Poly-nesia, February–March 2003.
[15] C. F. Chiasserini, I. Chlamtac, P. Monti, and A. Nucci, “Energyefficient design of wireless ad hoc networks,” in Proc. of IFIPNetworking, pp. 376–386, Pisa, Italy, May 2002.
[16] C. R. Lin and M. Gerla, “Adaptive clustering for mobile wire-less networks,” Journal on Selected Areas in Communication,vol. 15, no. 7, pp. 1265–1275, 1997.
[17] A. B. McDonald and T. F. Znati, “A mobility-based frameworkfor adaptive clustering in wireless ad hoc networks,” IEEEJournal on Selected Areas in Communications, vol. 17, no. 8,pp. 1466–1487, 1999.
[18] S. G. Foss and S. A. Zuyev, “On a voronoi aggregative pro-cess related to a bivariate poisson process,” Advances in Ap-plied Probability, vol. 28, no. 4, pp. 965–981, 1996.
[19] P. Santi, D. M. Blough, and F. Vainstein, “A probabilistic anal-ysis for the range assignment problem in ad hoc networks,”in Proc. 2nd ACM International Symposium on Mobile Ad Hoc
Networking and Computing (MobiHoc ’01), pp. 212–220, LongBeach, Calif, USA, October 2001.
[20] P. Billingsley, Probability and Measure, John-Wiley & Sons,New York, NY, USA, 1979.
[21] S. Julier and J. K. Uhlmann, “General decentralized data fu-sion with covariance intersection (CI),” in Handbook of Mul-tisensor data Fusion, D. L. Hall and J. Llinas, Eds., CRC Press,Boca Raton, Fla, USA, 2001.
[22] B. Das and V. Bharghavan, “Routing in ad-hoc networks us-ing minimum connected dominating sets,” in Proc. IEEE In-ternational Conference on Communications (ICC ’97), vol. 1,pp. 376–380, Montreal, Que., Canada, June 1997.
Chih-Yu Wen received the B.S.E.E. andM.S.E.E. degrees with high honors fromthe National Cheng Kung University in Tai-wan in 1995 and 1997, respectively. He re-ceived an M.S.E.E. degree from the Univer-sity of Wisconsin-Madison in 2002 and willcomplete the Ph.D. in electrical engineeringfrom the University of Wisconsin-Madisonin 2005. He has worked on cellular mobilesystems emphasizing the capacity of wire-less channels and networks, modulation, and error control cod-ing. Current research interests include wireless communications,adaptive signal processing, software-defined radio, and adaptivedistributed algorithms for wireless ad hoc sensor networks.
William A. Sethares received the B.A. degree in mathematics fromBrandeis University, Waltham, Mass, and the M.S. and Ph.D. de-grees in electrical engineering from Cornell University, Ithaca, NY.He has worked at the Raytheon Company as a Systems Engineerand is currently a Professor in the Department of Electrical andComputer Engineering at the University of Wisconsin - Madison.His research interests include adaptation and learning in signal pro-cessing, communications, and acoustics, and is the author of Tun-ing, Timbre, Spectrum, Scale (Springer, 1998) and the coauthor ofTelecommunication Breakdown (Prentice-Hall, 2004).

EURASIP Journal on Wireless Communications and Networking 2005:5, 698–711c© 2005 Sofie Pollin et al.
Optimizing Transmission and Shutdownfor Energy-Efficient Real-time PacketScheduling in Clustered Ad Hoc Networks
Sofie Pollin,1,2 Bruno Bougard,1,2 Rahul Mangharam,1,3 Francky Catthoor,1,2 Ingrid Moerman,1,4
Ragunathan Rajkumar,3 and Liesbet Van der Perre1
1 Wireless Research, IMEC, 3001 Leuven, BelgiumEmails: [email protected], [email protected], [email protected], [email protected]
2 ESAT/INSYS, Katholieke Universiteit Leuven, 3001 Leuven, Belgium
3 Real-Time & Multimedia Systems Laboratory, Carnegie Mellon University, Pittsburgh, PA 15213, USAEmails: [email protected], [email protected]
4 INTEC, Universiteit Gent, 9000 Gent, BelgiumEmail: [email protected]
Received 30 June 2004; Revised 22 March 2005
Energy efficiency is imperative to enable the deployment of ad hoc networks. Conventional power management focuses indepen-dently on the physical or MAC layer and approaches differ depending on the abstraction level. At the physical layer, the fundamen-tal tradeoff between transmission rate and energy is exploited, which leads to transmit as slow as possible. At MAC level, powerreduction techniques aim to transmit as fast as possible to maximize the radios power-off interval. The two approaches seemconflicting and it is not obvious which one is the most appropriate. We propose a transmission strategy that optimally mixes bothtechniques in a multiuser context. We present a cross-layer solution considering the transceiver power characteristics, the varyingsystem load, and the dynamic channel constraints. Based on this, we derive a low-complexity online scheduling algorithm. Re-sults considering an M-ary quadrature amplitude modulation radio show that for a range of scenarios a large power reduction isachieved, compared to the case where only scaling or shutdown is considered.
Keywords and phrases: clustered ad hoc networks, energy efficiency, lazy scheduling, shutdown, schedule-based MAC.
1. INTRODUCTION
Ad hoc wireless networks consist of a group of autonomousmobile nodes configuring themselves to form a network thatis adapted to the environment and the current needs. A broadrange of applications is possible, going from low-rate sensormonitoring applications [1] to high-rate multimedia appli-cations [2]. Both monitoring and multimedia applicationsare delay sensitive and an appropriate QoS architecture isneeded to take care of this in dynamic environments.
On the other hand, ad hoc networks are severely con-strained in terms of energy. Wireless communication allowsuntethered operation, which implies the need for battery-
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
powered devices. Due to the slow advances in battery tech-nology compared to the growth in system power require-ments [3], the use of ad hoc networks is limited by shortbattery lifetimes. It has already been shown in several designcases [4, 5] that the most critical energy consumers in a wire-less node are the radio electronics. Reducing the radio powerdissipation is hence crucial to enable the deployment of adhoc networks with satisfactory lifetime.
Currently, energy-efficient radio communication is tack-led differently depending on the level of abstraction. At thephysical layer, one tends to exploit the fundamental tradeoffthat exists between transmission rate and energy [6, 7]. Theinformation theory has shown that the capacity of the wire-less channel increases monotonically with the signal-to-noiseratio [8]. Hence, downscaling the transmission rate—that is,reducing the required channel capacity—allows decreasingthe signal-to-noise ratio and therefore the signal power. This

Energy-Efficient Real-time Packet Scheduling 699
leads to the “lazy scheduling” approach [7], which consists oftransmitting with the lowest power over the longest feasibleduration.
From a network point of view, the “lazy scheduling” re-sults in a selfish behavior of the individual nodes. A sched-ule, energy-optimal for one user—that is, which maximizesits timeshare of the wireless channel—might be heavily sub-optimal for the network, since other nodes contending forthe channel will have to delay their transmission or speed itup if they have to meet a deadline. Moreover, “lazy schedul-ing” only optimizes the transmit power. More specifically,it minimizes only the contribution of the electronics whosepower consumption is a function of the transmit power. Yet,in low- and middle-range radios, as mostly considered in adhoc networks, an important part of the power dissipation—that is, the contribution of the frequency synthesizer, the up-conversion mixers, and the filters—is not proportional to thetransmit power [9]. This motivates the approaches based onradio shutdown that tend to minimize the duty cycle of theradio circuitry, and therefore transmit as fast as possible. As aresult, they give other nodes the maximum timeshare of thechannel, showing inherently altruistic behavior. Approachesexist that jointly consider the medium access and routing[10, 11, 12] but neglect the physical layer aspects.
At first sight, the “lazy scheduling” and the shutdown ap-proaches seem conflicting. In this paper, we show that theyactually correspond to two extreme cases and that the opti-mal transmission strategy in a multiuser scenario consists ofa cross-layer combination of both approaches. Our contri-bution in this paper is a solution to determine a transmis-sion strategy with a small and bounded deviation from theglobal optimum, to be applied to ad hoc wireless networkswhere individual nodes cooperate. As practical radio imple-mentations only allow a discrete set of transmission schemes,the discrete nature of the problem is taken into account inthe system model and solution. We assume the channel isonly divided in time, hence no spatial reuse or interference isconsidered. The core of the scheduling algorithm consists ofcomputing per user a set of transmit opportunities that rep-resent optimally the tradeoff between the transmission timeand energy consumption. Then, these are combined acrossusers to determine the schedule with the minimal networkenergy consumption. The proposed algorithm is adaptive:depending on the traffic constraints and on the current chan-nel states of the users, more transmission scaling or shut-down is considered. This is illustrated using discrete-eventsimulations under varying traffic loads and node mobility.
Obtaining cooperation in a distributed and multiusercontext is not trivial. Approaches based on gaming theoryexist to achieve energy efficiency and fairness between ratio-nal users [13]. However, the control overhead can be signif-icant to achieve those equilibriums. Scalability and energy-efficiency concerns suggest a hierarchical organization of adhoc networks. In those cluster-based approaches, a clusterleader (CL) is present to be in charge of the clusters mainte-nance and communication, and is able to enforce solidaritybetween the users when needed. The CL can be periodicallyelected not to overload one single node [14]. Therefore, for
the remainder of this paper, we focus on clustered ad hocnetworks. The CL is always on to collect the requirements ofthe other nodes, and to distribute the optimal schedule. Weassume that each node in a cluster can overhear the othernodes, hence 1-hop communication is applied within eachcluster. Only one cluster is considered in this work. A possi-ble extension would be to employ a scheme similar to [15],and also exploit diversity across clusters.
The remainder of the paper is organized as follows. InSection 2, a detailed overview of work related to the con-tributions and specific focus of this work is given. Section 3elaborates on the energy and performance radio model andon the data link control protocol. Taking into account allpractical overheads, we present in Section 4 the tradeoff be-tween rate scaling and shutdown. An algorithm is proposedin Section 5 to determine a close-to-optimal time allocationacross all users and give results for a multiuser scenario. Fi-nally, conclusions are drawn in Section 6.
2. RELATED WORK
The battery constraints of wireless ad hoc networks have al-ready triggered a lot of research ranging from low-power cir-cuits for analog front end [16], power-aware digital circuitryand embedded software [17] to energy-efficient protocols formedium access control [11, 18]. These works propose solu-tions that may differ significantly depending on the consid-ered level of abstraction.
At the physical layer, one tries to exploit the fundamentaltradeoff that exists between the transmission rate and signal-to-noise ratio [8]. This leads to the so-called “lazy schedul-ing” approach of Uysal-Biyikoglu et al. [7]. The approach hasbeen extended in [6] to encounter first the discrete natureof the radio settings and second the nonproportionality ofthe radio circuitry consumption with the transmitted power.Discrete rate scaling is achieved by adapting the constella-tion size of the modulation, leading to dynamic modulationscaling (DMS), or by changing the code rate (dynamic codescaling, DCS).
From a network point of view, the “lazy scheduling” con-cept translates in trading off bandwidth (in terms of trans-mission time) to power. To that extent, it is not trivial to gen-eralize it to the multiuser context. Uysal-Biyikoglu et al. haveproposed a generalized version of their algorithm (right-flow) for a broadcast channel and to the multiaccess channelassuming a centralized medium access control protocol [19].In [20], a practical multiuser lazy scheduling scheme calledL-CSMA/CA is proposed. This scheme relies on a CSMA/CAdistributed medium access control and considers a finite dis-crete set of possible transmission rates. For applications withperiodic traffic and stringent instantaneous delay require-ments, real-time energy-aware packet scheduling is proposedin [21]. In this work, a share of the channel is allocatedto each flow depending on its deadline and worst-case datarequirements. Depending on its current data requirements,each node makes optimal use of its timeshare, and scalesdown the transmission rate if possible. Although significantenergy gains are achieved, this does not necessarily result in

700 EURASIP Journal on Wireless Communications and Networking
PA 090 ˜
DAC
DAC
I
Q
DSP tx
(a)
LNA 090 ˜
ADC
ADC
I
Q
DSP rx
(b)
Figure 1: (a) The tx and (b) the rx path considered.
the most energy-efficient schedule from network point ofview, as it is not exploiting multiuser channel or traffic di-versity.
To reduce the part of the energy consumption that isfixed and not related to the transmitted power, the sole op-tion is to minimize the radio duty cycle, shutting downthe circuitry as much as possible (sleep mode). However, anode cannot receive data when turned off, hence effectiveuse of the sleep mode requires a significant degree of coor-dination between nodes. To take care of this coordinationat the medium access level, both contention- and schedule-based solutions have been proposed. PAMAS [18] is oneof the earliest contention-based energy-efficient protocolsthat avoids overhearing among neighboring nodes by usingout-of-band paging to coordinate the shutdown. TRAMAis a time-slotted, schedule-based MAC that allows nodes toswitch to a low power mode when they are not transmittingor receiving [22]. It uses a distributed election scheme basedon information about the traffic at each node to determinewhich node can transmit at a particular timeslot.
To our knowledge, the joint optimization of the a prioricontradictory “lazy scheduling” and shutdown approacheshas not been studied yet in the dynamic multiaccess context.Although, in [6], a general framework is provided to derivethe operating regions when a transceiver should sleep or usetransmission scaling, a solution to optimize both in a sce-nario with multiuser channel or traffic diversity is not pro-posed. In [9, 23], a transmission strategy, combining trans-mission rate scaling and sleep duration optimization is stud-ied with and without coding. An offline optimization algo-rithm is proposed but the scope is limited to a single-userlink or a multiuser link with a fixed timeshare for each user.As a result, no solidarity exists between the users in achiev-ing global energy gains in a dynamic environment. In [24],it is shown that the fixed circuit power consumption hasa large impact when optimizing the energy consumptionacross both physical and MAC layers in IEEE 802.11 DCFwireless LANs. However, no shutdown is taken into accountin the optimization.
3. SYSTEM MODEL
Prior to analyzing the problem stated above, appropriate en-ergy and performance models have to be defined. We carryout the analysis for modulation scaling. We assume M-aryquadrature amplitude modulation (MQAM), as it is a com-mon case for benchmarking [6, 9]. By varying the modu-lation order M, the transmission rate can be scaled down.
Other physical layers can be used too, without impact on ouralgorithm as shown in previous work [25, 26]. The proposedalgorithm is general and flexibly adapts to the run time loadand physical layer details. In this section, we detail the en-ergy consumption and performance models of the MQAMphysical layer. More specifically, we derive the relation thatgives the data rate (R), the packet error probability (Pe), andthe transmit and receive energies per packet (Ept and Epr) asfunctions of the transmit power (Ptx), the discrete scaling pa-rameter (M) and the transmitter characteristics.
3.1. MQAM radio model
Energy modelAssume that a node can be in one of four modes: (1) a trans-mit mode, when the transmit part of the radio, including thepower amplifier that drives the antenna is on; (2) a receivemode, when the complete receive path of the transceiver isfueled; (3) an idle mode when the receiver is listening to thechannel; and (4) a sleep mode, when the complete radio, in-cluding the frequency synthesizer is switched off. Let’s denotePon tx, Pon rx, Pidle, and Psl, the power consumption in eachmode, respectively. The sleep mode power Psl is typically verysmall when CMOS technology is used [27], so that we neglectit in our model: Psl ≈ 0. Also, the receiver energy consump-tion being dominated by the analog part, we can assume thatPidle ≈ Pon rx. Considering the transmit mode, Pon tx cor-responds to the DC power of the circuitry (Figure 1), thatis, the digital signal processing to produce the baseband sig-nal (Pdsp tx), the digital-to-analog converter (PDAC), the fre-quency synthesizer to generate the carrier (Psyn), the mixers(Pmix), and image rejection filters (Pfilt tx) to operate the fre-quency upconversion, and finally the power amplifier (PPA)that drives the current to the antenna. We consider a direct-conversion architecture, so that only one frequency synthe-sizer and two mixers are required. Hence, Pon tx is given bythe following sum:
Pon tx = Pdsp tx + 2PDAC + Psyn + 2Pmix + Pfilt tx + PPA. (1)
The five first terms of the sum do not vary with the trans-mit power and the rate scaling parameter. For simplicity, wewill refer to this power as Pelec tx. The last term, PPA how-ever depends on the transmit power Ptx. We can assume thatPPA is, at first order, proportional to the transmit power. Wedefine η as the PA power efficiency:
PPA = Ptx
η. (2)

Energy-Efficient Real-time Packet Scheduling 701
Table 1: Parameter values used in our experiment.
Energy model Performance model MAC model
Ptx (dBm) [0 to 36] (step 0.5) A1 = −40 dB L = 1000 B
M[1, 2, 4, 6] K = −4 TIFS=10 µs
W = 1 MHz d = [10–50 m] LACK = LPOLL = 36 B
Pelex tx = Pelex rx = 100 mW kT = −174 dBm/Hz Lheader = LNULL = 20 B
Twake up= 100 µs Nf = 10 dB Lcontrol = 1 B
η = 0.3 ηIL = −5 dB PER = 10e-3
From (1) and (2), considering the definition of Pelec tx, wecan express Pon tx as
Pon tx = Pelec tx +Ptx
η. (3)
Similarly, the receiver DC power can be expressed as afunction of the powers of the low-noise amplifier (PLNA),the frequency synthesizer, the downconversion mixers (Pmix),the image rejection filters (Pfilt rx), the analog-to-digital con-verter (PADC), and the digital signal processing (Pdsp rx):
Pon rx=PLNA +Psyn +2Pmix +2Pfilt rx +2PADC +Pdsp rx. (4)
We summarize the notation by introducing
Pon rx = Pelec rx. (5)
From the knowledge of the expression of Pon tx, Pon rx andneglecting Psl, we can compute the energy needed to transmitand receive a packet of L bits:
Etx(M,Ptx
) = Pon txTon,
Erx(M,Ptx
) = Pon rxTon.(6)
Ton is the time the transmitter or the receiver has to beswitched on to, respectively, send or receive the packet. Itdepends on the modulation scaling parameter M and thepacket size L. Assuming a constant bandwidth W (Hz), thesymbol rate (or baud rate) for an MQAM modulation islimited to Rs = W (baud). For a constellation size of M,b = log2 M bits are transmitted per symbol. Hence, Ton isgiven by
Ton(M) = L
W log2 M. (7)
Finally, from (3), (5), (6), and (7), we obtain the expres-sion of Etx and Erx (parameters are listed in Table 1):
Etx(M,Ptx
) = (Pelec tx +Ptx
η
)× L
W log2 M,
Erx(M,Ptx
) = Pelec rx × L
W log2 M.
(8)
Performance model
Next to the energy model, it is mandatory to derive a per-formance model that relates the transmit power Ptx and thescaling parameter M to the packet error probability. Indeed,to achieve reliable transmission, a corrupted packet has to beretransmitted, which obviously affects the radio energy con-sumption.
First, the signal-to-noise ratio per symbol (Es/N0) at thereceiver has to be related to the transmitted power. This re-quires taking assumptions on the channel. We assume a nar-rowband flat fading channel is encountered. Also, consider-ing a slowly varying network topology, we can assume thatthe channel attenuation (due to the path loss and the fading)is constant during a scheduling cycle. The received power istypically expressed as a function of the distance d by (10),where A1 is the path loss for a distance of 1 m, K is thepath loss exponent, α is the random short time fading gain,and ηIL represents the implementation loss. Es/N0 is given by(10), where k is the Boltzmann constant, T the temperature,and Nf the receiver noise figure:
Pr = αA1dKηILPtx, (9)
Es
N0= Pr
Pn= αA1dKηILPtx
WkTN f. (10)
With MQAM signaling, assuming an Additive WhiteGaussian Noise (AWGN) channel, the symbol error proba-bility is bounded by [28]
PM(M,Ptx
) ≤ 2. erfc
(√3
2(M − 1)× Es
N0
). (11)
On an AWGN channel, without coding, the symbols er-rors are noncorrelated, so the packet error probability pertransmission can be directly derived from the symbol errorprobability:
Pe(M,Ptx
) = 1− (1− PM(M,Ptx
))L/b. (12)
Power ratio
The energy saving potential of transmission scaling com-pared to shutdown depends largely on the relative impact of

702 EURASIP Journal on Wireless Communications and Networking
the fixed circuit energy consumption to the scalable trans-mitter power consumption. Given (9) and (10), this ratio (C)can be written as
C(d) = Pelec tx × η × αA1dKηIL
Es/N0 ×WkTN f= Cim × dK . (13)
For a given transceiver, it depends on the distance d andon the target performance through the signal-to-noise ra-tio per symbol (Es/N0). Let’s fix Es/N0 to the value neededto achieve a target packet error rate (PER) of 10e-3 withM = 6.1 Then, we see that C depends on a transceiver-dependent constant Cim and the distance only.
Depending on the value of C, the fixed or the variablepart of the power consumption will be dominant. Consideran ad hoc networking scenario where the mobile users aremoving around. Clusters are formed dynamically by the hi-erarchical routing protocol, and the cluster ranges and nodedensity can vary drastically depending on the current nodedistribution. As such, the underlying scheduling schemeshould track at run time the instantaneous C (depending ona node-specific Cim and varying distance) of each node, inorder to determine the most energy-efficient schedule. Also,the mobility of the different users can be uncorrelated, lead-ing to multiuser diversity that should be exploited to achievethe best possible energy savings.
We carry out the analysis for different ratios to cover dif-ferent cluster topologies. Using discrete-event simulations,we show results for scenarios where the nodes move around,or have fixed positions. In the next subsection, we show howthe node information exchange is implemented and what isthe resulting protocol overhead. Next, we show how the op-timal schedule can efficiently be determined at run time.
3.2. Data link control protocol
Next to the performance and energy consumption behaviorof the radio, the medium access protocol has to be character-ized. We consider a centrally controlled protocol as depictedin Figure 2. Periodically, a cluster leader (CL) is elected tobe responsible for the cluster scheduling. This CL commu-nicates with the other mobile users (MUs) every schedulingperiod. To minimize the cost of waking up the radio, all com-munications of a single MU should be grouped together inthe scheduling period. Also, the total time needed for eachcommunication should be known in advance, such that allother MUs can be put asleep during that time. Hence, be-fore each communication round, the schedule has to be de-termined that allocates to each MU a transmit opportunityTXOP (when to start transmitting and for how long). Thisoptimal timeslot, however, varies with the current data re-quirements, distance and Cim of each MU.
Indeed, the distance and traffic requirements vary andcannot be predicted. To cope with unpredictable traffic
1As such, depending on the actual M used for the transmission, the ac-tual power ratio will not be smaller than C.
CL
MU
MU
MU
MU
DataTXOP
Figure 2: Centrally controlled LAN topology illustrating uplinkand peer-to-peer communication.
arrivals, it is possible to introduce a look-ahead buffer, dur-ing which traffic to be scheduled in the future is captured.This is also proposed in [7, 20]. However, the solution pro-posed in [20] requires a communication step after each look-ahead period to communicate the data requirements of eachuser and determine the schedule, prior to the actual dataexchanges. It is obvious that, when considering shutdowntoo, this approach is not optimal as it requires users to wakeup more often than needed for the data exchanges alone.It would however be much more practical, for a clusteredtopology where all traffic is received or overheard by the CLtaking the scheduling decision, to piggyback the control in-formation on the periodic data exchanges.
The piggybacking mechanism that enables optimal scal-ing and shutdown is illustrated in Figure 3. The CL col-lects the data requirements Xi, which denotes the numberof L-sized packets to send, for each MUi during the period[D, 2D]. The scheduling decision is taken at time 2D. Next,during [2D, 3D], the CL will piggyback the resulting sched-ule on the data and acknowledgements transmitted duringthat scheduling period. Finally, during [3D, 4D], each nodecan send the data it buffered during the initial period [ε,D+ε]. We note that ε is different and varying for each node,depending on the TXOP allocation for that node. It can beseen that the packet delay is bounded to [4D-ε] with thisscheme.
It should be clear that this delay look-ahead buffer solvesthe problem of the unpredictable traffic arrivals, withoutintroducing significant communication and wake up costs.Considering the distance MU-CL, introducing this look-ahead delay will result in constraints on the maximum speedof the users. Consider a maximum delay of 4D = 100 mil-liseconds, an MU at a speed of 5 km/h will have traveled0.14 m during that period, which we will show to be negli-gible.
We want to determine the total energy and time neededto send a packet with a given packet error rate (PER). Theprotocol overhead introduced by this piggybacking mecha-nism in addition to the protocol overhead of a centralizedand reliable MAC protocol as depicted in Figure 4 is verysmall. Using the MAC scheme discussed above, for uplink

Energy-Efficient Real-time Packet Scheduling 703
Look-aheadX1 for MU1
Collect X1
requirementsof all users
Inform users ofschedule for X1
Receive allX1 data
Periodicschedulinginstances
Piggybackinformation
exchange(schedule X2 andrequirement X3
on X1 dataexchange)
Look-aheadX2 for MU1
Collect X2
requirementsof all users
Inform X2
scheduleReceive X2
data
Look-aheadX3 for MU1
0 D 2D 3D 4D
Figure 3: The three phases of the delay look-ahead mechanism to obtain optimized transmission rate scaling and shutdown for multipleusers: (1) collect data requirements of all users, (2) inform users of schedule, and (3) receive data. All control information is piggybacked onthe periodic data transfer to minimize control communication overhead.
Uplink
(POLL)Downlink
Start TXOPIFS
Total time 1 packet transmission
Packet 1 IFS IFS
ACKPacket 2
Uplink
(POLL)Downlink
IFS Packet Packet 1ACKTime out
Figure 4: Timing of successful and failed uplink packet transmission under a MAC polling scheme.
communication, we can suppress the POLL message in mostcases. Only in the case no data or ACK between CL and MUare scheduled in a given scheduling period, an additionalPOLL (LPOLL) or NULL packet with size (LNULL) is needed.In the most efficient case, to implement the control informa-tion exchange, it is only needed to foresee an additional 8 bits(Lcontrol) for this case study. This is sufficient to communi-cate a maximum distance of 50 m between CL and MU (seelater) and a maximum buffer size of 31 packets. For the exactprotocol overheads, we refer to Table 1. This overhead is sentusing the same configuration as the data. If there is no datato send (e.g., NULL packet), the basic settings M = 1 andmax Ptx are used. Next, using the buffer scheme of Figure 3,the communication is scheduled so that each node is onlyawake, that is, only consumes energy, when communicat-ing. The wake up energy cost is paid once each schedulingperiod, and is hence not considered in the per-packet anal-ysis. This leads to the following expressions for the energyfor a successful or failed uplink packet transmission, takinginto account the overhead of header (Lheader), messages and
interframe spaces (TIFS) (Table 1, Figure 4):
Egood towardsCL(M,Ptx
)= Etx
(M,Ptx
)× L + LHeader
L
+((
2× Tifs + Ton(M)× LACK
L
)Pon rx
),
= Ebad CL(M,Ptx
),
Tgood CL(M)=Ton(M)× L + LHeader + LACK
L+(2× Tifs
)= Tbad CL(M).
(14)
For peer-to-peer communication, the energy consumedby the receiving node is of interest too. The overhead of thePOLL or control message to inform the peers of the sched-ule is not included in the per packet values, and should beadded once per scheduling period. This leads to the following

704 EURASIP Journal on Wireless Communications and Networking
P
Psl
PPA
Pelec tx
xpe
TXOP
ACK
(a)
PPA ACKPelec tx
TXOP
(b)
Figure 5: Expected Energy consumption and TXOP as a function of variable and fixed energy consumption and the number of retransmis-sions. (a) A single retransmission is foreseen, and the energy cost is scaled with the probability that this retransmission should happen (asthe node could shut down otherwise). (b) No retransmissions are foreseen, as the target PER can be guaranteed by a sufficiently large outputpower Ptx.
expressions for 1 packet, with an increased fixed energyconsumption compared to the scenario where data is for-warded to the CL:
Ebad peer(M,Ptx
)= Ebad CL
(M,Ptx
)+ Tbad peer(M)× Pon rx,
Egood peer(M,Ptx
)= Ebad peer
(M,Ptx
)+LACK
LEtx(M,Ptx
),
Tgood peer(M)
= Tbad peer(M) = Tgood CL(M).
(15)
The expressions for transmission from CL to MU arestraightforward. In the remainder of this section, we omit thescenario indices.
When targeting a certain degree of reliability, that is, PER,potential packet retransmissions must be considered in thetimeslot. This will allow to determine the total timeslot andexpected energy for transmitting a packet with given PER un-der the given scenario constraints (e.g., distance). The result-ing PER when sending a packet with error rate Pe and maxi-mum m retransmissions is
P(m,M,Ptx
) = Pe(M,Ptx
)m+1. (16)
Knowing the target degree of reliability by the deadline,the transmit opportunity (TXOP) to be allocated to an MUto send a unit of data L is determined for the worst-case num-ber of retransmissions m needed (17). This might result inchannel idle time considering the possibility that a retrans-mission is not needed. However, we want to determine inadvance a schedule that guarantees for each packet the targetPER. As a result, the potential allocation of unneeded trans-mission time to an MU cannot be avoided. Indeed, if prob-abilistic events would cause the schedule to vary, it wouldbe impossible to determine an optimal schedule in advanceand put the nodes to sleep2 the time they are not allocated
2It is possible to share retransmission time for packets of the same clusterhead. This additional optimization is not considered in this paper.
transmit time (Figure 5):
TXOP(m,M,Ptx
) = Tgood(M,Ptx
)+m×Tbad
(M,Ptx
). (17)
Considering that the MU is only awake to transmit orretransmit a packet, and sleeps immediately after successfultransmission of all queued packets, we can calculate the ex-pected energy consumption for one packet. We consider theexpected values, as the number of retransmissions that willbe needed is an average variable. Equation (18) scales the en-ergy due to retransmissions with the probability they shouldhappen, that is, the probability that the previous ( j − 1)thtransmission failed (Figure 5):
E(m,M,Ptx
) = (1− P(m,M,Ptx
))× Egood(M,Ptx
)+ Ebad
(M,Ptx
)× (m + 1)× P(m,M,Ptx
)+ Ebad
(M,Ptx
)× (1− Pe(M,Ptx
))
×m∑j=1
P(j − 1,M,Ptx
)j.
(18)
4. SYSTEM ENERGY VERSUS TRANSMITOPPORTUNITY TRADEOFF
In the previous section, expressions are given for the ex-pected energy E(m,M,Ptx) and timeslot TXOP(m, M, Ptx) tocommunicate a unit of data L, and the resulting error rateP(m,M,Ptx). They can be determined for each configurationof the output power Ptx and scaling parameter M, and eachnumber of retransmissions m, for a given Cim and d. In thissection, we want to obtain the set of useful points, to be con-sidered by the run-time scheduling algorithm, for each givenCim and d.
When determining the expected Energy and TXOP foreach configuration (m,M,Ptx), a cloud of discrete points inthe Energy-TXOP plane is obtained (Figure 6). However, theonly useful points are those that represent the optimal trade-off between Energy and TXOP for a given target error rateP, that is, the points that are closest to the origin (lowest en-ergy and timeslot). Indeed, for each timeshare of the chan-nel allocated to a user, we are interested in the configura-tion point that achieves the lowest possible energy within this

Energy-Efficient Real-time Packet Scheduling 705
1 2 3 4 5 6 7 8 9 10
TXOP (ms)
B
A
0.001
0.01
0.1
1
En
ergy
/pac
ket
(J)
Tradeoff curveAll
Figure 6: Optimal energy versus TXOP to send a unit L of datafor different transceiver ratios for distance = 35 m, compared to allpoints in the energy-TXOP plane that are obtained by varying thedifferent scaling parameters (Ptx and M) or the number of retrans-missions m,which satisfy the target PER constraint.
timeshare. Consider configuration A on Figure 6. This con-figuration should never been allocated, as for each timeshareit fits in, there exists another configuration that also fits thetimeshare and achieves a lower average energy consumption(configuration B in this case).
We approximate this complete set of useful points withthe piecewise linear interpolation of the convex minorant ofthe point cloud. The considered tradeoff is then that partof the minorant that is monotonically decreasing (Figure 6).This pruned piecewise linear interpolation of the convex mi-norant will be called the Energy-TXOP tradeoff curve in theremainder of this paper. Only the discrete points can be al-located in practical transceivers. In fact, this discrete set ofoptimal configuration points can be determined at the de-sign time (or during a calibration step) of the transceiver. Al-though the models used in this paper enable an analyticalcomputation of the optimal curves, real system implementa-tions incur lots of complex interactions between both analogand digital components, making the exact tradeoff analyti-cally intractable. As will be shown later, this tradeoff curvecaptures all information needed to determine efficiently anddynamically the optimal schedule across nodes.
The optimal points should be determined for a range ofpower ratios, as the value that is of interest depends on therun time operating conditions due to topology variations.Targeting a practical implementation of the algorithm, weonly consider a discrete set of calibration curves. Consider-ing a fixed Cim per node, a discrete set of distances should bedetermined to do the calibration. Determining the optimaldiscrete set of distances for which the calibration step shouldbe performed clearly involves a tradeoff. The larger the set of
0 1 2 3 4 5 6 7 8 9 10
TXOP (ms)
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
En
ergy
/pac
ket
(J)
[0,d8][d7,d6][d6,d5][d5,d4]
[d4,d3][d3,d2][d2,d1][d1, 50]
Figure 7: Optimal energy versus TXOP for different distances de-termined according to (19). Based on these curves, we will derivethe scheduling algorithm.
curves, the more calibration time will be needed, and morememory to store the databases. Moreover, the overhead tocommunicate the current distance will increase with finergranularity. On the other hand, a more accurate adaptationto the actual distance will result in more precise adaptationof the output power to the current distance (for the targetPER and delay constraint). Also, as the optimal combinationof shutdown and scaling depends on the power ratio C, it isalso affected by this discretization.
Considering a maximum MU-CL distance of, for exam-ple, 50 m, we want to determine the set of discrete distancesdi that guarantee a bounded suboptimal power consump-tion at each moment in time. For each actual distance, weuse the precomputed curve for a distance that is “just larger”than the actual distance. Allocating a transmit power for alarger distance than the actual one will result in an excessivepower allocation, which we want to bound by x. Followingthis strategy, we determine the optimal set of distances dias:
d0 = 50 m,
(di+1
)−K =(1− xC
(di))
(1 + x)× (di)−K ,
(19)
where x is a positive value smaller than 1 denoting thepower loss that can be tolerated between two discrete opti-mal curves. Enough curves are determined when xC(di) > 1,that is, the fixed part of the power consumption is dominantso it is not needed to consider smaller distances. In Figure 7,the curves for a maximum distance of 50 m and x = 0.15 are

706 EURASIP Journal on Wireless Communications and Networking
plotted. Only 8 different calibration curves are needed, re-sulting in only 3 bits required to communicate the distance.
It can be seen that, for smaller d, the Energy-TXOP trade-off curve spans a much smaller range in energy—that is,downscaling is not beneficial. Indeed, it has been shown thatthe gains that can be achieved by scaling down the transmis-sion power are small [9]. On the other hand, when the trans-mit power dominates, a large gain in energy can be achievedwhen scaling down.
Using this information, we target a TXOP allocation thatadapts optimally to the varying distance and data require-ments typically encountered in wireless ad hoc networks.Each node is only awake to serve its own data requirements,wasting no energy in overhearing traffic of the other nodes.In the next section, it is shown how the optimal cluster trans-mission strategy is determined.
5. NETWORK OPTIMAL TRANSMISSION ALLOCATION
Based on the Energy-TXOP tradeoff for each MU, we want todetermine the set of transmit opportunities that minimizesthe total network energy consumption for the current aggre-gate data requirement X , which denotes the number of L-sized packets to be transmitted during the next schedulingperiod D. In the first subsection, we derive an algorithm tocompute, based on per packet tradeoff curves of the differ-ent MUs, a solution that deviates by a small and boundedoffset from the global optimal solution. Second, results areillustrated for a range of scenarios implemented in a discrete-event simulator.
5.1. Cluster TXOP allocation
To determine the optimal transmission strategy for the clus-ter, we build the aggregate Energy-TXOP tradeoff curve forthe whole cluster, based on the aggregate traffic load X andthe Energy-TXOP tradeoff curve for each MU. To empha-size the difference between the cluster and per-node trade-off we call the former Energycluster-TXOPcluster and the latterEnergyi-TXOPi tradeoff curve, for a network consisting of Nmobile users MUi, 1 ≤ i ≤ N . Each MUi has data require-ment Xi, the aggregate requirement is X =∑N
i=1 Xi.Each MUi considers, depending on its current dis-
tance, its tradeoff curve representing a set of j points,(Ei, j , TXOPi, j), 0 ≤ j ≤ Q. Each curve is a set of maximalQ (minimal 0) segments with a negative slope:
si, j =∣∣∆Ei, j /∆TXOPi, j
∣∣,
∆Ei, j = Ei, j − Ei, j−1,
∆TXOPi, j = TXOPi, j − TXOPi, j−1.
(20)
Within a tradeoff curve, the segments are ordered accord-ing to increasing TXOP or decreasing Energy. Because of theconvexity of the curve, the segments are as such ordered ac-cording to decreasing negative slope, that is, the energy thatcan be gained when increasing the allocated timeslot with atime unit decreases. For each curve, the starting point of the
0 2 4 6 8 10 12 14 16
TXOP (ms)
0
0.1
0.0
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
ener
gy/X
pack
ets
Start allocationfor 4 packets
Scale down4 of 5 packets
Subopt. bound
X = 1X = 2X = 3X = 4
X = 5X = 6X = 7
Figure 8: Aggregate Energy-TXOP for identical cluster heads, datarequirement X from 1 to 7 and scheduling period D = 10 millisec-onds. Starting from the curve for one packet for a single MU net-work (lowest curve), the aggregate curves are plotted to send up to 7packets for that MU within the scheduling period D or equivalentlyto send 1 packet for 7 MUs with the same per-packet curve (sameCim and distance).
first segment TXOPi,0 corresponds to the smallest timeslotallocation with the largest energy consumption.
Based on the Energyi-TXOPi tradeoff curves and datarequirements Xi, we determine the cluster Energycluster-TXOPcluster tradeoff consisting of a set of points k, using thefollowing greedy algorithm (See Figure 8 for Xi = 1 to 7 anda single MUi). First the start allocation for the network is de-termined. This allocation gives to each MU the minimal timeneeded to satisfy its requirements,3 at maximal energy con-sumption. In next rounds of the algorithm, energy will besaved by repeatedly allocating more time to some users.
(1) Allocate each MUi its minimal required TXOPi, j , thatis, TXOPi,0. Multiply this timeslot with the total load for thisMUi, to obtain the total timeslot needed for that node in thecluster: TXOPcluster,i,0 = Xi × TXOPi,0, where k = 0 refers tothe current (first) point added. This corresponds to an aver-age energy consumption of Ecluster,i,0 = Xi×Ei,0 for that node.Knowing the requirements for each node i, we can constructthe first point k = 0 of the cluster Energycluster-TXOPcluster
tradeoff: (Ecluster,k, TXOPcluster,k):
Ecluster,0 =N∑i=1
Ecluster,i,0,
TXOPcluster,0 =N∑i=1
TXOPcluster,i,0.
(21)
3We assume it is always possible to construct this first point. Hence, nooverload is taken into account.

Energy-Efficient Real-time Packet Scheduling 707
The first point is the sum of the per-node minimal resourcerequirements, resulting in the maximum energy consump-tion for the cluster. After determining the first point of thecurve, we will construct the whole cluster curve allowing foroptimal decrease of the energy consumption. We will addpoints k to the Energycluster-TXOPcluster curve, using the seg-ments si, j of the per MUi individual curves. MUi with nosegment si, j are not longer considered, as their only TXOP(= TXOPi,0) has already been allocated. As the curve for eachMUi consists of different segments depending on their cur-rent distance and Cim, the loop j across the segments will bedifferent for each MUi. Hence, from now, we denote j(i). Af-ter this initialization, we set j(i) = 1 for each node i; k′ = 0for the cluster, that is, k′ denotes the last added point to theaggregate optimal curve.
(2) Search across the set of current segments si, j(i) thosewith the largest negative slope S. As such, we are surethat the best possible energy saving is obtained across thecluster. For each MUi with current slope si, j(i) = S andfor each of its packets Xi,4 a new point is added to theaggregate tradeoff curve, resulting in segments scluster,k =|∆Ecluster,k/∆TXOPcluster,k|, where each increment can be un-derstood as increasing the time allocated to one packet of oneMUi, hence ∆TXOPcluster,k = ∆TXOPi, j(i). This results in anetwork energy decrease ∆Ecluster,k = ∆Ei, j(i). The result ofthis step is a set of network allocation vectors with lower ag-gregate expected energy but a larger time allocation:
(Ecluster,k, TXOPcluster,k
), ∀k | k′ < k ≤
(k′+
∑i|si, j(i)=S
Xi
),
Ecluster,k = Ecluster,k−1 − ∆Ecluster,k,
TXOPcluster,k = TXOPcluster,k−1 +∆TXOPcluster,k,(22)
where k′ denotes the number of points after the previousstep. The sum of the number of packets across the selectedMU′i s corresponds to the number of points added in thisstep. After adding all points, the current set of segments isupdated. This means that for each MUi that was treated inthis step, the next segment of its tradeoff curve (if it exists)is considered: j(i) ← ( j(i) + 1), for all i|(si, j(i)=S). Also theaggregate curve counter is updated: k′ = k.
(3) Repeat step 2 until all segments si, j(i) for all MUi
are treated. A network tradeoff curve with maximum QXXpoints is constructed, Q denoting the maximum number ofsegments per Energyi-TXOPi curve for each MUi.
Knowing the cluster Energycluster-TXOPcluster curve, thenetwork allocation vector corresponds to the point withthe largest aggregate TXOPcluster,k that is smaller than thescheduling period D, as illustrated in Figure 8 for D = 10milliseconds. It is clear that for larger data requirements,less downscaling is possible. The figure represents a set of
4The exact order to add extra time for each packet of different mobileusers should be random to achieve fairness.
0.1 0.2 0.4 0.8
Poisson load (Mbps)
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
ener
gy/b
it(J
)
ScalingScaling + shutdownShutdown
Figure 9: Normalized energy per bit for a topology of 5 nodes, D =100 milliseconds, distance 33 m, for a range of poisson loads.
aggregate Energycluster-TXOPcluster curves for a single MUi
with data requirement Xi ranging from 1 to 7 packets perperiod. The complexity to construct the aggregate curve isO(NQ log(N)).
It can be shown that solving this kind of discrete opti-mization problems with a greedy approach (e.g., accordingto steepest decreasing slope) based on the convex piecewise-linear interpolation of the tradeoff results in a solution thatis bounded suboptimal. This can be understood intuitively,as shown in Figure 8. As the solution relies on the convexpiecewise-linear interpolation of the tradeoff, each discretepoint of the aggregate curve corresponds to an optimal al-location, but only for a scheduling period D that is exactlyequal to TXOPcluster,k of the selected point k. However, mostoften, a point has to be taken with a value that is slightlysmaller than D. The greedy search based on pruned convextradeoff curves however does not guarantee that there doesnot exist a solution with TXOPcluster, optimal that is larger thanTXOPcluster,k but smaller than D (and has a smaller energyconsumption Ecluster, optimal). However, due to convexity, thispoint has to be above the piecewise linear tradeoff curve.Consequently, it can be seen that the worst case differencebetween Ecluster, optimal and Ecluster,k is bounded by the ∆Emax
across all segments of the curve, which is relatively small anddepends on the granularity of the system parameters consid-ered.
5.2. Results
To illustrate the strengths of the proposed scheme over arange of load scenarios and node topologies, we have im-plemented it in the discrete-event simulator ns-2 [29]. Theimplementation reflects the full energy and performancebehavior of the MQAM radio as presented in Section 3.1.Next, the delay look-ahead scheduling protocol presentedin Section 3.2 has been implemented on top of a centrally

708 EURASIP Journal on Wireless Communications and Networking
20 25 30 35 40 45 50
Distance (m)
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1N
orm
aliz
eden
ergy
/bit
(J)
ScalingScaling + shutdownShutdown
(a)
0.1 0.2 0.4 0.8
Poisson load (Mbps)
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
ener
gy/b
it(J
)
ScalingScaling + shutdownShutdown
(b)
Figure 10: Normalized energy per bit for a topology of 5 nodes, D = 100 milliseconds (a) with Poisson load of 0.4 Mbps for a range ofdistance, (b) moving around randomly for a range of Poisson loads.
6 8 10 12 14 16 18 20
Number of nodes
0
0.2
0.4
0.6
0.8
1
Nor
mal
ized
ener
gy/b
it(J
)
ScalingScaling + shutdownShutdown
Figure 11: Normalized energy per bit for a topology with a rangeof nodes, with aggregate CBR load of 1.6 Mbps, distance of 33 m,D = 100 milliseconds.
controlled reliable MAC scheme. The exact overhead consid-ered for the MAC protocol is given in Table 1. When thereis no data available, a NULL packet is sent. The proposedscheme is compared with energy management techniquesthat use scaling or shutdown only. In the shutdown only pro-tocol, we do adapt the output power to the given distance(but do not scale down the transmission rate).
Simulations have been carried out for a range of mo-bile users, with identical Cim, but with possible different andvarying CL-MU distances. The scheduling database has been
generated according to the parameters listed in Table 1 andusing (1)–(19). This results in a database for the distances[22, 29, 33, 37, 40, 42, 45, 47] m. Using the broad range ofscenarios possible with this discrete-event simulation tool,we mainly want to show that the proposed algorithm indeedoptimally adapts to the instantaneous scenario constraints,exploiting more scaling or shutdown depending on the sce-nario, to achieve maximum energy savings.
First, we show that depending on the current traffic load,shutdown or scaling achieves larger energy savings. The pro-posed algorithm, however, adapts and achieves for each loadinstance the best possible gains. Figure 9 shows the energyconsumptions of the proposed scheme, compared to shut-down or scaling only, for a Poisson load up to 0.8 Mbps,and a distance of 33 m. It can be seen that when the loadis small, more shutdown should be used. However, when theload increases, the use of transmission scaling becomes moreand more useful. The proposed scheme however adapts andachieves at each moment a smaller energy consumption.
Next, we consider the effect of mobility on the en-ergy consumption. As mentioned before in Section 3.1, alarger distance corresponds to a more dominant transmis-sion power. To that extent, the gains of shutdown comparedto scaling also vary with distance, as illustrated in Figure 10afor a CBR load of 0.4 Mbps over 5 users at varying (fixed)distance. In Figure 10b, the energy is plotted over a rangeof Poisson loads, for 5 users with mobility 2 km/h, walkingaround in a square of 50 m by 50 m, with the CL in the ori-gin. The mobility pattern has been generated using the set-dest tool for ns-2. It can be seen that, when introducing mo-bility and hence larger distances than the 33 m of Figure 9,the overall gains of scaling are larger, resulting in the cross-ing of the “scaling” and “shutdown” curves for a lower load.

Energy-Efficient Real-time Packet Scheduling 709
The proposed scheme however adapts and exploits the pos-sibilities to save energy for each distance and load optimally.
Finally, we investigate the effect of increasing the num-ber of users (Figure 11). It can be seen, for an aggregate CBRload of 1.6 Mbps (or 37.5%) that the energy consumed whenusing the “scaling” energy management technique increaseslinearly with the number of nodes (for the same aggregatenetwork load). This is because the idle and receiver energywill scale linearly with the number of nodes, irrespective ofthe aggregate load. When adding the possibility to shutdown,the energy increase with increasing number of nodes is muchslower. In this case, each node is asleep when the others trans-mit. The energy increase is hence only due to increase wakeup cost, and the increased probability to send a NULL packetwhen the queue is empty (as the per-node load decreases).It should be noted that it depends on the network density todecide whether the “shutdown” or “scaling” solution is themost energy efficient. The proposed adaptive solution, how-ever, takes advantage of both techniques in each situation.
6. CONCLUSIONS
In this paper, we propose a transmission strategy that com-bines close-to-optimally “lazy scheduling” and shutdown,two energy management techniques that seem contradictory.The former exploits the fundamental tradeoff between thetime and energy needed to send a unit of data, and hencemaximizes the transmission duration to minimize the trans-mit energy consumption. The latter minimizes the fixed cir-cuit energy consumption, hence decreasing the transceiveron time as much as possible. We show that the optimal trans-mission strategy in a multiuser scenario is a combination ofboth approaches. Moreover, the optimal combination differsdepending on the instantaneous scenario traffic and channelconstraints.
First, we derive a solution to determine a transmissionstrategy with a worst-case deviation from the optimal strat-egy that is bounded. As practical radio implementations onlyallow a discrete set of transmission schemes, this discrete na-ture of the problem is taken into account in the system modeland solution. The proposed algorithm is adaptive: depend-ing on the traffic constraints and on the relative impact ofthe transmission power to the circuit energy consumption,more transmission scaling or shutdown is considered. Weshow that the algorithm indeed results in significant energysavings for a range of traffic loads and transceiver charac-teristics, using discrete-event simulation. It adaptively com-bines and trades off the gains that can be achieved whenscaling or shutting down only, and hence significantly out-performs those energy management techniques in each sce-nario. Moreover, it optimally exploits multiuser diversity byscaling down the rate of those users where the instantaneousgains are the largest.
ACKNOWLEDGMENT
The work presented in this paper is partly based on resultspublished in EWSN ’05.
REFERENCES
[1] D. Estrin, R. Govindan, J. S. Heidemann, and S. Kumar, “Nextcentury challenges: Scalable coordination in sensor networks,”in Proc. 5th Annual ACM/IEEE International Conference onMobile Computing and Networking (MobiCom ’99), pp. 263–270, Seattle, Wash, USA, August 1999.
[2] H.-L. Chao and W. Liao, “Credit-based slot allocation formultimedia mobile ad hoc networks,” IEEE J. Select. AreasCommun., vol. 21, no. 10, pp. 1642–1651, 2003.
[3] T. E. Starner, “Powerful change part 1: batteries and possiblealternatives for the mobile market,” IEEE Pervasive Comput-ing, vol. 2, no. 4, pp. 86–88, 2003.
[4] A. Chandrakasan, R. Amirtharajah, S. Cho, et al., “Designconsiderations for distributed microsensor systems,” in Proc.IEEE Custom Integrated Circuits Conference (CICC ’99), pp.279–286, San Diego, Calif, USA, May 1999.
[5] J. M. Rabaey, M. J. Ammer, J. L. da Silva Jr., D. Patel, and S.Roundy, “PicoRadio supports ad hoc ultra-low power wirelessnetworking,” IEEE Computer, vol. 33, no. 7, pp. 42–48, 2000.
[6] C. Schurgers, Energy-aware wireless communications, Ph.D.thesis, University of California, Los Angeles, Calif, USA, 2002.
[7] E. Uysal-Biyikoglu, B. Prabhakar, and A. El Gamal, “Energy-efficient packet transmission over a wireless link,” IEEE/ACMTrans. Networking, vol. 10, no. 4, pp. 487–499, 2002.
[8] C. E. Shannon, “A mathematical theory of communication,”Bell System Technical Journal, vol. 27, no. 1, 3, pp. 379–423,623–656, 1948.
[9] S. Cui, A. J. Goldsmith, and A. Bahai, “Modulation opti-mization under energy constraints,” in Proc. IEEE InternationlConference on Communications (ICC ’03), Anchorage, Alaska,USA, May 2003.
[10] B. Chen, K. Jamieson, H. Balakrishnan, and R. Morris,“Span: An energy-efficient coordination algorithm for topol-ogy maintenance in ad hoc wireless networks,” in Proc. 7thAnnual International Conference on Mobile Computing andNetworking (MobiCom ’01), pp. 85–96, Rome, Italy, July 2001.
[11] W. Ye, J. S. Heidemann, and D. Estrin, “An energy-efficientMAC protocol for wireless sensor networks,” in Proc. IEEE21st Annual Joint Conference of the IEEE Computer and Com-munications Societies (INFOCOM ’02), vol. 3, pp. 1567–1576,New York, NY, USA, June 2002.
[12] Y. Xu, J. S. Heidemann, and D. Estrin, “Geography-informedenergy conservation for ad hoc routing,” in Proc. 7th AnnualInternational Conference on Mobile Computing and Network-ing (MobiCom ’01), pp. 70–84, Rome, Italy, July 2001.
[13] V. Srinivasan, P. Nuggehalli, C. F. Chiasserini, and R. R. Rao,“Cooperation in wireless ad hoc networks,” in Proc. IEEE 22ndAnnual Joint Conference of the IEEE Computer and Commu-nications Societies (INFOCOM ’03), vol. 2, pp. 808–817, SanFranciso, Calif, USA, March–April 2003.
[14] Z. Cai, M. Lu, and X. Wang, “Channel access-based self-organized clustering in ad hoc networks,” IEEE Transactionson Mobile Computing, vol. 2, no. 2, pp. 102–113, 2003.
[15] Y. Yu, B. Krishnamachari, and V. K. Prasanna, “Energy-latencytradeoffs for data gathering in wireless sensor networks,” inProc. 23rd Annual Joint Conference of the IEEE Computer andCommunications Societies (INFOCOM ’04), vol. 1, pp. 244–255, Hong Kong, China, March 2004.
[16] A.-S. Porret, T. Melly, C. C. Enz, and E. A. Vittoz, “A low-power low-voltage transceiver architecture suitable for wire-less distributed sensors network,” in Proc. IEEE Int. Symp.Circuits and Systems (ISCAS ’00), vol. 1, pp. 56–59, Geneva,Switzerland, May 2000.
[17] R. Min and A. Chandrakasan, “A framework for energy-scalable communication in high-density wireless networks,”

710 EURASIP Journal on Wireless Communications and Networking
in Proc. International Symposium on Low Power Electronics andDesign (ISLPED ’02), pp. 36–41, Monterey, Calif, USA, August2002.
[18] S. Singh and C. Raghavendra, “PAMAS: Power aware multi-access protocol with signaling for ad hoc networks,” ACMComputer Communication Review, vol. 28, no. 3, pp. 5–26,1998.
[19] A. El Gamal, C. Nair, B. Prabhakar, E. Uysal-Biyikoglu, and S.Zahedi, “Energy-efficient scheduling of packet transmissionsover wireless networks,” in Proc. IEEE 21st Annual Joint Con-ference of the IEEE Computer and Communications Societies(INFOCOM ’02), vol. 3, pp. 1773–1782, New York, NY, USA,June 2002.
[20] R. R. Kompella and A. C. Snoeren, “Practical lazy schedulingin sensor networks,” in Proc. 1st International Conference onEmbedded Networked Sensor Systems (ACM SenSys ’03), pp.280–291, Los Angeles, Calif, USA, November 2003.
[21] C. Schurgers, V. Raghunathan, and M. B. Srivastava, “Modu-lation scaling for real-time energy aware packet scheduling,”in Proc. IEEE Global Telecommunications Conference (GLOBE-COM ’01), vol. 6, pp. 3653–3657, San Antonio, Tex, USA,November 2001.
[22] V. Rajendran, K. Obraczka, and J. J. Garcia-Luna-Aceves,“Energy-efficient collision-free medium access control forwireless sensor networks,” in Proc. 1st International Conferenceon Embedded Networked Sensor Systems (ACM SenSys ’03), pp.181–192, Los Angeles, Calif, USA, November 2003.
[23] S. Cui, A. J. Goldsmith, and A. Bahai, “Energy-constrainedmodulation optimization for coded systems,” in Proc. IEEEGlobal Telecommunications Conference (GLOBECOM ’03),vol. 1, pp. 372–376, San Francisco, Calif, USA, December2003.
[24] J. Zhao, Z. Guo, and W. Zhu, “Power efficiency in IEEE802.11a WLAN with cross-layer adaptation,” in Proc. IEEE In-ternational Conference on Communications (ICC ’03), vol. 3,pp. 2030–2034, Anchorage, Alaska, USA, May 2003.
[25] S. Pollin, B. Bougard, R. Mangharam, et al., “Optimiz-ing transmission and shutdown for energy-efficient packetscheduling in sensor networks,” in Proc. European Workshopon Wireless Sensor Networks (EWSN ’05), Istanbul, Turkey,January–February 2005.
[26] R. Mangharam, S. Pollin, B. Bougard, et al., “Optimal fixedand scalable energy management for wireless networks,” inProc. IEEE 24th Annual Joint Conference of the IEEE Computerand Communications Societies (INFOCOM ’05), Miami, Fla,USA, March 2005.
[27] B. Razavi, Design of Analog CMOS Integrated Circuits,McGraw-Hill, New York, NY, USA, 2001.
[28] J. Proakis, Digital Communications, McGraw-Hill, New York,NY, USA, 1995.
[29] “ns-2 Network Simulator,” http://www.isi.edu/nsnam/ns.
Sofie Pollin received the M.S. degree in elec-trical engineering from the Katholieke Uni-versiteit Leuven, Belgium, in 2002. In Octo-ber 2002, she joined the Wireless Researchgroup, the Interuniversity MicroelectronicsCenter (IMEC), and started her Ph.D. thesisat the Electrical Engineering Department,the Katholieke Universiteit Leuven. Her cur-rent research focuses on the cross-layer de-sign and implementation of adaptive andlow-power wireless networking systems. In the summer of 2004,she was a Visiting Scholar at National Semiconductor, Santa Clara,Calif, and in the summer of 2005 at UC Berkley.
Bruno Bougard received the M.S. degreein electrical engineering from the Polytech-nic Institute of Mons, Belgium, in 2000. Hejoined the Interuniversity MicroelectronicsCenter (IMEC), Leuven, Belgium, in June2000, as a Research Engineer in the Wire-less Research Group. His current researchfocuses on design methodologies for low-power wireless communication systems. Hepreviously contributed as a system architectto the design, the optimization, and the characterization of low-power, high-data-rate turbo decoder architecture. Since 2002, hehas been a Research Assistant of the Fund for Scientific Research(Belgium) and a Ph.D. candidate at the Electrical Engineering De-partment, the Katholieke Universiteit Leuven, Belgium, still carry-ing out his research at IMEC.
Rahul Mangharam is a Ph.D. student inthe Department of Electrical and ComputerEngineering, Carnegie Mellon University,USA. His interests are in scheduling algo-rithms for wireless and embedded systems.He was a Visiting Scholar in the WirelessSystems Group at IMEC, Belgium, in 2003.In 2002, he was a member of technical staffin the Ultra-Wide Band Wireless Group atIntel Labs. He has worked on ASIC chip de-sign at Marconi Communications (1999) and Gigabit Ethernet atApple Computer Inc. (2000).
Francky Catthoor is a Fellow at IMEC,Heverlee, Belgium. He is also an IEEE Fel-low. He received the Engineering degreeand a Ph.D. degree in electrical engineeringfrom the Katholieke Universiteit Leuven,Belgium, in 1982 and 1987, respectively. Be-tween 1987 and 1999, he has headed re-search domains in the area of architecturaland system-level synthesis methodologies,within the DESICS (formerly VSDM) Divi-sion at IMEC. His main current research activities belong to thefield of architecture design methods and system-level explorationfor power and memory footprint within real-time constraints,oriented towards data storage management, global data transferoptimization, and concurrency exploitation. Platforms that con-tain both customizable/configurable architectures and (parallel)programmable instruction-set processors are targeted. Also deep-submicron technology issues are included.
Ingrid Moerman was born in Gent, Bel-gium, in 1965. She received the Eng. de-gree in electrotechnical engineering andthe Ph.D. degree from the Ghent Univer-sity, Gent, Belgium, in 1987 and 1992, re-spectively. Since 1987, she has been withthe Interuniversity Microelectronics Cen-ter (IMEC), the Department of InformationTechnology (INTEC), the Ghent University,where she conducted research in the fieldof optoelectronics. In 1997, she became a permanent member ofthe research staff at IMEC. Since 2000, she has been a part-timeProfessor at the Ghent University. Since 2001, she has switched

Energy-Efficient Real-time Packet Scheduling 711
her research domain to broadband communication networks. Sheis currently involved in the research and education on broadbandmobile and wireless communication networks and on multimediaover IP. Her main research interests related to mobile and wirelesscommunication networks are adaptive QoS routing in wireless adhoc networks, personal networks, body area networks, wireless ac-cess to vehicles (high bandwidth & driving speed), protocol boost-ing on wireless links, design of fixed access/metro part, traffic en-gineering and QoS support in the wireless access network. She isan author or coauthor of more than 300 publications in the field ofoptoelectronics and communication networks.
Ragunathan Rajkumar is a Professor inthe Departments of Electrical and Com-puter Engineering and of Computer Sci-ence, Carnegie Mellon University. He ob-tained his B.E. (honors) degree from theUniversity of Madras in 1984, and his M.S.and Ph.D. degrees from Carnegie MellonUniversity in 1986 and 1989, respectively.His research interests include all aspects ofembedded real-time systems as well as QoSsupport in operating systems and networking. He was also theprimary founder of TimeSys Corporation, a vendor of embeddedLinux and Java products. He has chaired several international con-ferences and has authored a book and more than 90 publications inconferences and journals.
Liesbet Van der Perre received the M.S. de-gree and the Ph.D. degree in electrical en-gineering from the Katholieke UniversiteitLeuven, Belgium, in 1992 and 1997, respec-tively. Her work in the past focused on sys-tem design and digital modems for high-speed wireless communications. She was aSystem Architect in IMEC’s OFDM ASICsdevelopment and a Project Leader for theTurbo codec. Currently, she is the ScientificDirector of wireless research in IMEC.

EURASIP Journal on Wireless Communications and Networking 2005:5, 712–730c© 2005 Tullio Facchinetti et al.
Dynamic Resource Reservation and ConnectivityTracking to Support Real-Time Communicationamong Mobile Units
Tullio FacchinettiDipartimento di Informatica e Sistemistica (DIS), Universita di Pavia, 27100 Pavia, ItalyEmail: [email protected]
Giorgio ButtazzoDipartimento di Informatica e Sistemistica (DIS), Universita di Pavia, 27100 Pavia, ItalyEmail: [email protected]
Luis AlmeidaInstituto de Engenharia Electronica e Telematica de Aveiro (IEETA), and Departamento deElectronica e Telecomunicacoes (DET), Universidade de Aveiro, 3810-193 Aveiro, PortugalEmail: [email protected]
Received 29 June 2004; Revised 25 April 2005
Wireless communication technology is spreading quickly in almost all the information technology areas as a consequence of agradual enhancement in quality and security of the communication, together with a decrease in the related costs. This facili-tates the development of relatively low-cost teams of autonomous (robotic) mobile units that cooperate to achieve a commongoal. Providing real-time communication among the team units is highly desirable for guaranteeing a predictable behavior inthose applications in which the robots have to operate autonomously in unstructured environments. This paper proposes a MACprotocol for wireless communication that supports dynamic resource reservation and topology management for relatively smallnetworks of cooperative units (10–20 units). The protocol uses a slotted time-triggered medium access transmission control thatis collision-free, even in the presence of hidden nodes. The transmissions are scheduled according to the earliest deadline firstscheduling policy. An adequate admission control guarantees the timing constraints of the team communication requirements,including when new nodes dynamically join or leave the team. The paper describes the protocol focusing on the consensus proce-dure that supports coherent changes in the global system. We also introduce a distributed connectivity tracking mechanism thatis used to detect network partition and absent or crashed nodes. Finally, a set of simulation results are shown that illustrate theeffectiveness of the proposed approaches.
Keywords and phrases: topology, wireless, mobile, real time, distributed network.
1. INTRODUCTION
The relevance of ah hoc networking is clearly stated by severalauthors (e.g., [1, 2]) that present specific applications suit-able for mobile ad hoc networks (MANETs). One class of ap-plications is the interconnection of multiple robotic mobileunits. Groups of such units represent an attractive solution inthose situations in which the environment’s conditions arenot suitable for direct human intervention. This can occur
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
in space missions, in the exploration of hazardous environ-ment, in demining, surveillance, and civil protection [3]. Inthese cases, relatively small teams of robots are required tooperate autonomously in open environments, for monitor-ing and exploration purposes. In addition, they have to co-operate for achieving a common goal. Communication sys-tems based on wired backbones are not usually suitable forthis kind of applications because it is often impossible to de-ploy a wired infrastructure in open or remote spaces. As aconsequence, a full autonomy of the robotic team can onlybe achieved through a wireless ad hoc network [4].
Moreover, robots must exchange information concern-ing both the environment and their own state, which is

Dynamic Bandwidth Reservation for Mobile Robots 713
inherently time constrained. This calls for a real-timecommunication protocol capable of meeting the globalcommunication requirements, namely, in terms of band-width and communication delays. However, achieving real-time communication over wireless networks has long beena challenge [5, 6] mainly due to the higher attenuation andhigher bit error rates typical of that medium as well asits open character. The challenge is, however, substantiallylarger when the nodes move and establish ad hoc links as inwireless mobile ad hoc networks (MANETs) [7]. It is inter-esting to notice that these networks differ from sensor net-works [5] in at least two ways: they are not always large scale,which means scalability might not be an issue, and physicalconstraints are not as stringent, which means that more pow-erful processors, radio transceivers, and batteries can gener-ally be used. This latter aspect does not mean, however, thatresource consciousness is not an issue. It still is, but gen-erally at a lower importance than in sensor networks. Onthe other hand, MANETs differ from industrial wireless net-works [6] because these are frequently structured, that is,based on fixed access points.
A further challenge in MANETs is supporting dynamicresource reservation as required by nodes that join or leavethe team at run time, or by changes in the communication re-quirements. This is necessary for an efficient use of the com-munication bandwidth and for flexibility with respect to theoperational environment.
This paper proposes a communication protocol forMANETs targeted to small teams of mobile autonomousrobots that move in the vicinity of each other and period-ically broadcast state or environment information (e.g., avalue of temperature, the concentration of a polutant, theposition of a target, a video/audio stream, the robot’s posi-tion, its energy level and integrity status). The underlying co-operation model follows the producer/consumer paradigmin which several producers transmit periodically informationthat is made available to consumers who may retrieve it fromthe network if required. This model is particularly adaptedto applications such as teams of surveillance robots, rescuerobots, or even soccer robots as those used in the RoboCupMiddle Size League.
The protocol supports dynamic resource managementwith adequate admission control, thus respecting the com-munication timing constraints, even in the presence of com-munication errors and hidden nodes. To support dynamicresource management the protocol uses a consensus proce-dure that allows all nodes to be aware of changes in resourceallocation, enforcing globally coherent decisions. Moreover,to maintain updated information on the network topologyeven when nodes move, a similar mechanism based on a con-nectivity matrix is used to track the current topology. Bothmechanisms, for consensus as well as for connectivity track-ing, are the focus of this work.
The paper is organized as follows. Section 2 presents abrief survey of related work and Section 3 introduces thesystem model. Then, Section 4 introduces our approach totrack the network topology. Section 5 describes the con-sensus procedure while Section 6 presents and validates an
upper bound on the time taken by the consensus procedureand includes simulation results that show the effectivenessof the protocol even with errors and mobility. Section 7illustrates the simulation results concerning the resourcereservation method and the proposed topology-trackingalgorithm. Some implementation issues are presented inSection 8, including an evaluation of the protocol overhead.Finally, Section 9 states our conclusions and future work.
2. RELATED WORK
Wireless communication technology has recently becomepervasive in many application domains, enabled by a gradualenhancement in quality and security of the communication,together with a substantial decrease in the related costs. Theresulting wireless networks are normally classified in two cat-egories: structured, that is, based on fixed access points; andad hoc. A further classification divides the latter category intomobile ad hoc networks (MANETs) [4] and sensor networks[5].
All categories have been extensively addressed by the re-search community but only a relatively small subset of thevast amount of the available literature addresses aspects re-lated to real-time communication. Two fundamental aspectsthat constrain the real-time behavior are the medium ac-cess control (MAC) protocol and the mechanisms to han-dle dynamic communication requirements. This paper dealswith these two aspects in the scope of MANETs, particularlyfor small teams of autonomous mobile robots, that is, witharound 10 to 20 units, which move in the vicinity of eachother and broadcast periodic information.
One of the main challenges in MANETs is dealing withmobility. In fact, as nodes move, the links between nodesmay break and new links may be established, leading to a dy-namic connectivity. To deal with mobility, MANETs typicallyuse specific techniques. For example, in [8], the link durationfor different mobility scenarios is analyzed in order to deduceadaptive metrics to identify more stable links. Another possi-ble approach is to manage the network topology by control-ling the positioning of certain or all nodes. This is proposedin [9], where a set of specific nodes (PILOT nodes) is orientedtoward specific places to support the connectivity of the re-maining nodes (general sensor nodes) in order to sustainreal-time communication. Combining real-time communi-cation and mobility is analyzed in [7], where mobility aware-ness and prediction are proposed to perform proactive rout-ing and resource reservation to allow meeting real-time con-straints. However, they do not propose a specific algorithmor method to achieve this. Soft real-time communicationamong a dynamic set of nodes, on top of IEEE 802.11 net-works, is achieved in [10] by means of a dynamic bandwidthmanager that adapts on line the transmission rates of currentstreams to accommodate new ones. However, 1-hop commu-nication is considered, that is, a fully linked network, andthe bandwidth manager is centralized in one node, collect-ing global information from the streams being transmitted.Conversely, [11] presents a scheme based on a modificationof the IEEE 802.11 MAC, namely, distributed weighted fair

714 EURASIP Journal on Wireless Communications and Networking
scheduling in which several streams are scheduled accordingto their weights by adequately adapting the backoff intervalat the MAC level. The possibility for dynamic weights is alsoanalyzed, allowing the use of such protocol in dynamic envi-ronments. Nevertheless, in these two solutions, the real-timeproperties of the protocols are relatively poor, with collisionsstill occurring, thus their soft real-time nature. Johansson etal. [12] address Bluetooth and, particularly, the impact of us-ing several traffic scheduling policies by the piconet masterto deliver real-time communication services. This protocoluses global information at the piconet level, which is keptcentrally by the master to poll the remaining nodes for theirtransmissions.
This paper proposes the use of implicit EDF [13] to pro-vide real-time guarantees to the network traffic while usingnearly all the communication medium bandwidth. The priceto pay is an extra overhead required for system synchroniza-tion. Implicit EDF is a time-triggered medium access controldiscipline in which all nodes implement in parallel an EDFqueue of all communication requests. Collisions are avoidedby replicating and executing the EDF scheduler in parallelin all nodes, in a tightly synchronized way. This means thatall local EDF schedulers generate precisely the same sched-ule which corresponds to implementing a single global EDFqueue of ready messages. In this model, every node knowswhen to transmit and receive, even in the presence of hid-den nodes. The protocol uses a slotted framework in whichmessages are allocated an integer number of fixed durationslots.
Implicit EDF is further combined with a consensus pro-cedure to support dynamic communication requirementsand, generally, dynamic resource reservation. This is neces-sary to enforce simultaneous updating of all local EDF sched-ules. Moreover, a connectivity tracking mechanism is usedthat supports the detection of absent or crashed nodes.
The problem of reaching a consensus has been widelyconsidered in the literature on distributed systems since itwas firstly introduced in [14]. Dolev et al. [15] proved thatin a system with clock synchronization and time-boundedcommunications, such as ours, it is possible to reach a con-sensus. An equivalent problem is the one of fault-tolerantbroadcasts [16]. Many of the previously proposed algorithms[17, 18] are in principle applicable to a wireless distributedsystem, which can be seen as one using an unreliable commu-nication medium. Consensus is thus achieved by exchang-ing specific messages, the number of which depends on thetype and number of faults that are to be tolerated. In a wire-less medium the number of faults can be substantial, for ex-ample, caused by transmission errors, interferences, and dy-namic network topology. This makes achieving consensus ina wireless network typically bandwidth expensive.
Therefore, this paper proposes a consensus procedurethat keeps the respective overhead under deterministicbounds and isolates it from the remaining traffic to preventmutual temporal interference. This is achieved piggyback-ing the consensus-related information on top of a periodicsystem message used for synchronization purposes whosebandwidth is guaranteed.
The consensus procedure is optimistic in the sense that,upon a change request, a future time instant is defined atwhich the procedure is concluded. At that instant, nodescheck an aggregated positive acknowledgement, which wasdisseminated through the network after the request, and de-termine whether there was an agreement among all nodes.The change request is executed only in case of consensus. Inthis paper, we will use the expressions consensus and agree-ment interchangeably.
A preliminary combination of implicit EDF and the pro-posed consensus procedure was first presented in [19] butwith the restrictive assumption of absence of hidden nodes,a restriction that is now lifted.
3. SYSTEM MODEL
System architecture
The global system architecture considered in this paperconsists of a set Π of nπ mobile units or nodes, Π =p1, . . . , pnπ, which can communicate over a radio-basedwireless medium. Every unit is unambiguously identified bya statically assigned identifier Id(pi) = Idi. All the nodesuse a single shared radio channel to exchange messages. Thenodes are not location-aware and the topology is not man-aged meaning that there is no topology-oriented control ofthe nodes movement.
We say that node pi is linked to node pj if pi is able tolisten to a transmission from pj . In such a case, we say thereis a link Li j from node pi to node pj , represented by the edgepi → pj in the connectivity graph. A set of links connectingtwo nodes pi and pj establishes a path between them. A pathfrom pi to pj will be denoted as pi ≡ pm1 → ·· · → pms−1 →pms ≡ pj . Then, a team (or network) π(t) ⊆ Π is defined as adynamic subset of n(t) nodes from Π, π(t) = p1, . . . , pn(t).If not explicitly declared, in the following sections we willrefer unambiguously to n(t) as n and to π(t) as π. A team isfully connected if for any pair of nodes pi, pj ∈ π(t) thereexists at least a path between them. More restrictively, a teamis fully linked if for any pair of nodes pi, pj ∈ π(t) there existsat least a link between them.
In order to maintain topological information of the net-work at each instant, each node pk uses a connectivity matrixMk, with n×n elements, which can be considered as the adja-cency matrix for an oriented graph. The generic element Mk
ij
placed in the ith row and jth column is a flag indicating whatnode pk knows about the link Li j . We set Mk
ij = 1 (i = j) if
there exists such a link and Mkij = 0 (i = j) otherwise; we set
Mkii = 0 for each i by default. The Mk matrix is dynamic since
the units are moving, thus it changes over time as new linksare established or broken. Therefore, we will use Mk(t) to re-fer to the connectivity matrix owned by node pk at instant t.
Communication model
Communication among nodes is organized in consecutiveslots, referred to as system ticks, which have a constant du-ration Ttick. The model is periodic, which means that allmessage streams served by the communication system are

Dynamic Bandwidth Reservation for Mobile Robots 715
0 2 4 6 8 10 12 14 16 18 20 22 24
Schedule 1 1 2 3 1 2 2 1 3 3 1 2 1 1 3 2 1 2
p3
0 8 16 24
p2
0 6 12 18 24
p1
0 4 8 12 16 20 24
msync
0 5 10 15 20
Sent by p1 Sent by p2 Sent by p3 Sent by p1 Sent by p2
Tsync
Bandwidthrequirements
i T C
Sync 5 1
1 4 1
2 6 1
3 8 1
Figure 1: Example showing the msync message broadcast.
periodic, that is, made of a potentially infinite sequence ofmessage instances submitted periodically for transmission.For the sake of simplicity, the expression message will alsobe used to refer to a message stream, unless otherwise stated.
Message addressing is content-based, making use ofan identifier. Furthermore, the communication follows aproducer-consumer model, according to which producersbroadcast their messages autonomously, with a given fre-quency, while consumers retrieve from the network the mes-sages that are relevant to them.
The generic message ml generated by node pi is charac-terized by its identifier Il, a transmission period Tl, a rela-tive deadline Dl, an offset Ol, and a transmission durationCl, all (except the identifier) expressed in ticks. The commu-nication requirements table (CRT) holds the properties of allthe messages to be scheduled by the communication system,so CRT = ml(Il,Cl,Tl,Dl,Ol), l = 1, . . . ,N, where N is thenumber of message streams produced by all nodes. The totalbandwidth requirement is given by UCRT =
∑Nl=1 Cl/Tl.
We say that the traffic model is dynamic since exist-ing network nodes may request changes in their messagestreams, or nodes not in the network may request to join,or even nodes in the team may request to leave or just crash.In all these circumstances, the CRT must be updated. Sincethe CRT is replicated in all the nodes together with the EDFscheduler, a consensus process is required to reach an agree-ment among all nodes in the team concerning the CRT up-date, including hidden nodes. Whenever it is necessary to re-fer to each CRT replica separately, we will use CRTk(t) mean-ing the replica within node pk at instant t.
To support topology self-checking, synchronization,and admission control, each node pk periodically broad-casts a message with its own CRTk(t), Mk(t), local clockvalue clkk(t), and other information related to the con-sensus procedure triggered upon CRT change requests.This is called the system synchronization message msync
and it is broadcast by all nodes in a round-robin fashion
(pk, . . . , p1, pn, pn−1, . . . , pk+1). We will call the transmissionof a synchronization message a step. The ensemble of allthese messages constitutes a periodic message stream withperiod Tsync, called the synchronization step period, and du-ration Csync. However, each instance of this message streamis transmitted by a different node according to the round-robin sequence based on the node identifier. Figure 1 showsan example of a schedule of the communication activity, with3 nodes sending one message each, plus the synchronizationmessage. In that case, each message uses a single slot only,that is, C1,...,3 = Csync = 1, and the step period is 5, that is,Tsync = 5.
From a traffic scheduling point of view, msync is like an-other periodic message, scheduled together with the remain-ing messages by the implicit EDF scheduler, with periodTsync, deadline Dsync = Tsync, offset Osync = 0, and dura-tion Csync. Each node knows when to transmit its own msync
by checking the round-robin list and sends the msync mes-sage once every synchronization round, with period Tround =nTsync.
The total bandwidth consumed by our communicationsystem is given by
Utot =N∑i=1
Ci
Ti+Csync
Tsync. (1)
Notice that Utot includes all overheads, such as all the controlinformation sent each slot, as well as any unused space withinthe slots.
Finally, the clock sent within the synchronization mes-sage (clki(t)) includes both a representation of continuoustime (i.e., with microseconds resolution) and an absolute tickcounter (slot counter). The former is used for clock synchro-nization purposes while the latter is used for scheduling andconsensus purposes. For clarity of presentation, we will useclki(t) to refer to the tick counter only, unless explicitly statedotherwise.

716 EURASIP Journal on Wireless Communications and Networking
Real-time guarantees
As referred before, messages are scheduled using the implicitEDF approach [13]. Each message is transmitted as a se-quence of fixed size packets, each of which is transmitted ina single slot. Implicit EDF considers that message preemp-tion is possible at the slot boundaries, that is, between pack-ets. Since all messages also become ready for transmissionsynchronously with the slot boundary, then, this schedulingmodel is equivalent to preemptive EDF [20]. Therefore, thefollowing condition is sufficient and necessary to guaranteethat the traffic is schedulable, that is, that all messages will betransmitted once within their periods:
Utot ≤ 1. (2)
This condition assumes deadlines equal to periods and hasthe advantage of being extremely simple to evaluate. Otherconditions exist, however, for the general case of arbitrarydeadlines [21], that can be directly applied.
The above condition is evaluated on line, as part of anadmission control, prior to accepting any change in the cur-rent communication requirements, for example, updating aperiod or adding a new stream. Changes are accepted if thecondition is met, thus assuring a continued real-time behav-ior.
During topology changes the timeliness of transmissionsis assured by means of the synchronization mechanisms ofthe EDF schedulers. However, the set of nodes that receive agiven message might change. If a node needs a given streamthat is no longer receiving, it must issue a request for the ad-dition of one or more streams to relay the information of theformer one. If n streams are added with period T , the end-to-end delay is upper bounded by (n + 1) ∗ T − 1. Tighterestimations can be achieved with a judicious use of offsets.
4. CONNECTIVITY TRACKING
This section presents the network connection tracking mech-anism. Generally, due to mobility, crashes, or other phenom-ena, the connectivity matrices of different nodes will differ assoon as a change in the network topology occurs, since theydo not all perceive that change directly. The proposed algo-rithm is based on the exchange of the connectivity matrixheld by each node, supporting a convergence of all the ma-trices to the unique and correct view of the whole networklinks. The algorithm makes the simple assumption that allnodes are able to detect omissions of expected transmissionsaccording to the current schedule. This assumption is easyto achieve in the proposed communication model, but doesnot limit the usage of our approach to such a communicationmodel.
To spread the knowledge on the connections through thenetwork and to achieve the covergence of the matrices ownedby all the nodes to the right view of the network connectiv-ity, each node pw must broadcast its own connectivity ma-trix Mw(t). When node pk receives a broadcast or does notreceive an expected transmission, it locally updates its own
update matrix (k, w, Mw , δk)
(1) if (pk receives the expected Mw) (2) d = φ(w,Mw)
(3) for each i = k (4) if (d[i] + 1 ≤ δk[i] · dist) (5) set column Mk
i =Mwi
(6) set δk[i] = (w, d[i]+1)
(7) (8) else (9) if (δk[i] · node = w) (10) set δk[i] = (NULL,∞)
(11) (12) (13) (14) set Mk
wk = 1
(15) (16) else (17) if (Mk
wk = 1) (18) set δk[w] = (NULL,∞)
(19) for each i such that δk[i] · node = w (20) set δk[i] = (NULL,∞)
(21) (22) (23) set Mk
wk = 0
(24) (25) for each i such that δk[i] · dist = ∞(26) set column Mk
i = 0
Algorithm 1: The updating algorithm for the connectivity matrix.
Mk(t) matrix and a local state variable δk(t) according toAlgorithm 1.
4.1. Data structures
Two data structures are used by each node pk to track theexact topology of the team:
(i) the connectivity matrix Mk(t) as described in the pre-vious section;
(ii) the minimum distance vector δk(t).
The δk(t) is a vector of n elements where the ith vectorelement, that is, δk[i], contains the identifier of node pw fromwhich node pk got the information about the links of nodepi; it also contains the distance (in terms of hops) of nodepw from node pk. We will indicate the content of the δk[i]as δ[i]k · node for the node identifier and δk[i] · dist for thevalue of the distance. We will also write δk[i] = (n,d) if δk[i]·node = n and δ[i]k · dist = d.
While the matrix Mk must be broadcast, the δk vector isstored and used locally to the nodes only. This is very conve-nient as Mk is a binary matrix and can be encoded in just asmall number of bytes.

Dynamic Bandwidth Reservation for Mobile Robots 717
4.2. Updating algorithm
The following terminology is used to describe the algorithm:
(i) pk is the node that updates its matrix Mk;(ii) pw is the node that broadcast its matrix Mw;
(iii) δk is the minimum distance vector owned by node pk;(iv) the function φ(w,Mw) returns the minimum distances
of all the nodes reachable from node w, as a result ofthe inspection of matrix Mw.
Note that a matrix broadcasting may not be heard bynode pk depending on several factors: high distance, presenceof obstacle between the nodes, limited transmission power,interferences, and so forth.
The algorithm for updating the connectivity matrix is il-lustrated in Algorithm 1.
The basic idea behind the algorithm is that when node pkreceives a matrix Mw, it extracts the information about thedistances of the broadcasting node pw to all the other nodes.Then, pk updates the ith column of its own matrix Mk (thatrefers to the ingoing links of node pi) only if pw is closer topi than the previous node from which the information wastaken. The distance of the previous node is retrieved by in-specting the δk[i] · dist value. When pk does not receive anexpected broadcast from pw, it resets all the columns in Mk
that were taken from a previous reception of Mw (if any) andresets the entries stored in δk that refer to pw as well.
4.3. Description of the algorithm
Firstly, we assume that δk[k] = (k, 0), meaning that node pkis 0 hops distant from itself. We also make the nonrestrictiveassumption that Mk
ii = 0 for all i.We must distinguish between two situations: line (1) tests
if an expected communication was received. If matrix Mw
was received, then its content can be used to update Mk, elsethe local variables have to be updated in a different manner.From line (1) to line (16) we consider the case of matrix re-ception.
Line (2) calls the function φ(w,Mw) in order to analyzethe received matrix and to calculate the minimum distancesfrom pw to all the nodes connected to it. It returns the vectord containing the minimum distances of node pw from all theother nodes on the basis of the paths detected by inspectingMw. By writing d[i] = x we mean that node pi is x hops farfrom pw. In Section 4.4 we report a more detailed descriptionof this function.
Line (3) starts the cycle for updating every column of pkexcluding the kth one, in which each flag is updated only onthe basis of the matrix reception. Line (4) tests if, for eachnode pi, node pw is closer to pi than the node from whichthe current data in the ith column was copied. If it is closer,the ith column is copied from Mw to Mk (line (5)) and theidentifier of pw, together with its distance from pi, is storedin δk[i] (line (6)). In line (6) we add 1 to the value of d[i] totake into account the distance between pk and pw (1 hop).
If the distance between pw and pi is greater than the onestored in the δk[i] · dist and the sending node is equal to
δk[i] · node (line (9)), then we reset the δk[i] entries (line(10)). This is done in order to reset the knowledge of pkin this particular case and to accept an update from a nodecloser to pk; this is fundamental for the convergence of thealgorithm when the node mobility causes the formation ofseparated subnetworks.
In line (14) the flag Mkwk is set to keep track of the correct
reception by pk of the matrix sent by pw.From line (16) the algorithm deals with a missing re-
ception of an expected matrix. The instruction at line (17)checks if the node that missed the transmission was regis-tered as a 1-hop distant node (flag Mk
wk = 1). If so, the al-gorithm first resets the δk[w] entry (line (18)) together withall the entries of δk directly related to pw (line (20)). Finally,it stores the information about the missed reception by un-marking the cell Mk
wk (line (23)).Since during the execution of the algorithm so far some
entries may have been set to (NULL,∞), we have to clear therelated rows. In line (26) we reset the ith column of Mk ifδk[i] = ∞.
4.4. Evaluation of the minimum distance
The function d = φ(i,M) is used to inspect the connectiv-ity matrix M in order to get the minimum distances amongnode pi and all the other nodes of the network on the basis ofthe paths defined by M. It returns a vector d where d[ j] rep-resents the distance between pi and pj in number of hops.The distance from pw to itself is 0. If there are any paths con-necting pi with another node pj , then d[ j] = ∞.
For the evaluation of the distances, φ(i,M) uses thebreadth-first search (BFS) [22]. The function φ(i,M) is themost expensive computation performed by the connectivitytracking algorithm. While all the loops used to update thematrix have a complexity that is O(n), if L is the total numberof links among the nodes—bidirectional links are countedtwice—the complexity of φ(i,M) is O(nL).
4.5. Properties and usefulness of the matrix
The main benefit associated to the connectivity matrix is thesimple determination of which nodes receive the transmis-sions of any other nodes. However, this requires a careful in-spection of the matrix, mainly due to the possible existenceof asymmetric links. The rows of a generic matrix Mw giveinformation on the nodes that are received by node pw; onthe other hand, the columns of the matrix give informationon the nodes that listen to a broadcast of node pw. This prop-erty is evident in the examples reported (Figures 2, 3, and 4).Among other possible uses, this information can also be use-ful for routing to determine a good path (e.g., the shortestone) from source to destination. This can be achieved usinga simple BFS search (Section 4.4).
In Figure 2 there is an example of a network connectedwith both unidirectional and bidirectional links. By examin-ing the network topology, it is easy to check that from all thenodes there exists a path connecting all the other nodes inthe two ways (ingoing and outgoing). This corresponds to aconnectivity matrix without empty rows or columns.

718 EURASIP Journal on Wireless Communications and Networking
p1
p8
p3
p2
p9
p6
p7
p5
p4
Topology matrix
1 2 3 4 5 6 7 8 9123456789
p1 · · · p9
Figure 2: Example of unidirectional links between the nodes.
p1
p8
p3p2
p6p7 p5
p4
Topology matrices
1 2 3 4 5 6 7 812345678
p1
12345678
1 2 3 4 5 6 7 8
p2 · · · p8
Figure 3: Example of isolated node: node p1 broadcast does not reach any other nodes.
Another use of the connectivity matrix is to identify iso-lated nodes, for example, due to insufficient transmissionrange, or also network partitions. If node pw cannot beheard by the other nodes in the network, then its matrix Mw
presents an emptywth column. In the same way, all the nodeswill present an empty wth row. The situation is well depictedin Figure 3. While most of the nodes in the network are con-nected with bidirectional links, node p1, due to its positionor transmission range, can only receive messages from theother nodes: the column 1 of M1 is empty. The matrix of allthe other nodes, Mi with i = 2, . . . ,8, have the row 1 empty,since they did not receive any transmission from node p1.
Finally, another very interesting property of the proposedconnectivity tracking algorithm is the speed of detecting ab-sent nodes. The indentifier of the nodes that deliver the in-formation is stored inside the MDV vector, as well as the dis-tance from the node that is currently consuming such in-formation. This implies a very useful property: a node pithat was directly connected (through a 1-hop link) to a nodepj is able to detect the absence of node pj , due to crashor insufficient transmission range, as soon as it detects theomission of the respective broadcast. This happens becauseMDVk[i] = 1, meaning that the distance value referring topj and stored into MDV is 1, which is the minimum possiblevalue for any j = i. As a corollary of the previous property, anode can check if it is isolated from the remaining nodes inonly one synchronization round (n steps), that is, when it de-tects the omission of the broadcasts from all the other nodesin the network.
5. REACHING A CONSENSUS
Whenever a global decision must be taken by the team, forexample, concerning a change in the communication sched-ule triggered by a joining request from a new robot or a re-quest for changes in the bandwidth requirements, it is im-portant to guarantee that such decision is consistent for allthe members and that it is taken at the same time becausethe schedule is computed independently and locally to eachnode. This is achieved by keeping track of the knowledgethe other team units have about the decision to take. Sucha knowledge is stored in a data structure, called the agree-ment vector A, which is broadcast by all nodes within thesynchronization message. The agreement vector is an arrayof n elements, owned by each member of the team, whereAk denotes the vector owned by node pk. The ith element Ak
i
of the vector is a binary flag indicating whether node pi hasbeen notified of the global decision. When marked (Ak
i = 1),it means that node pk knows that node pi is aware of thedecision. Therefore, A represents an aggregated acknowledg-ment of the global awareness of the decision to be taken at adefined time in the future.
5.1. The consensus process
In the field of distributed systems, there is a substantialamount of work in consensus processes, which must gener-ally enforce the following three properties [17]: termination,validity, and agreement. Below, we state these properties in

Dynamic Bandwidth Reservation for Mobile Robots 719
p1
p2 p3
p4
(a)
p8
p7 p5
p6
(b)
Topology matrices
1 2 3 4 5 6 7 812345678
p1 · · · p4
12345678
1 2 3 4 5 6 7 8
p5 · · · p8
(c)
Figure 4: Example of matrix configuration for partitioned networks.
the scope of our consensus model, which presents some spe-cific features that are different from traditional ones.
(1) Termination. The consensus process stops anyway at agiven time t, whether or not the agreement has beenreached. This is explicitly enforced by our protocol bysetting a termination time a priori, when a consensusprocess is triggered.
(2) Validity. Any consensus process is meaningful in thesense that it is triggered by the system for the sake ofthe system correct operation. This property is enforcedby our fault model because it does not consider mali-cious faults such as those in which an erroneous pro-cess could be triggered or a node could purposely jeop-ardize an on-going process.
(3) Agreement. At the process termination time t, two ormore nodes can have different information concern-ing the consensus process status and thus decide dif-ferently. However, such inconsistency does not jeopar-dize the consistent operation of the system. This is en-forced by a positive aggregated acknowledgment of theconsensus process in all nodes that allows differentia-tion of those that reached consensus, which will followon, from those that did not, which will stop and resyn-chronize with the former ones. Such an aggregated ac-knowledgment is based on the agreement vector A.
5.2. Triggering a new process
When a node pk needs to trigger a consensus process, it mustfulfill the following.
(1) It must assign a unique identifier prock to the process.Notice that the round-robin circulation of the syn-chronization message transmission ensures that onlyone node can trigger an agreement process at any giventime. Therefore, each process can be uniquely identi-fied by the clock value at the time it will be triggered,that is, prock = clkk(t). Recall that clkk(t) is the tickcounter value of the slot in which msync is sent.
(2) It must wait for its turn to broadcast the synchroniza-tion message msync.
(3) If there is another process already running in the sys-tem, the vector Ak owned by pk is not empty. In this
case, pk cannot start a new process, which must be re-triggered later.
(4) Otherwise, or after the termination of the previousprocess, it must mark the cell Ak
k in an empty (new)vector.
(5) It must associate to the consensus process the identifierIdi of the node that issued the request (possibly, i = k).This is necessary to differentiate between several re-quests that can arrive to the same node pk, before itcan trigger the respective processes (e.g., p6 in Figure 5can receive requests from pnew2 and pnew3).
(6) It must set the agreement time ta equal to the trig-gering time clkk(t) plus an upper bound on the du-ration of the consensus process, as derived further on(S(n)Tsync). The agreement time ta is the time at whichall nodes will simultaneously update the communica-tion system data, including the CRT, matrix M, vectorA, and the round-robin circulation list.
(7) It must send the synchronous message msync with theupdated agreement information, that is, prock, Idi,A, ta, together with the communication requirementsupdate, that is, the properties of the message to beadapted, added, or removed.
To enforce data consistency during a consensus process,it is crucial that n does not change in the middle of the pro-cess (otherwise, it could, e.g., invalidate the update instant).This is achieved by preventing a node from triggering a newconsensus process when there is an on-going one, as statedin the rules above. However, since the processes take time topropagate, it is possible that one node triggers a process with-out knowing that another process is already in progress. Forexample, in Figure 5, node p6 could trigger one consensusprocess to admit pnew2, while p1 could trigger another one inthe following cycle to admit pnew1. As both processes propa-gate, there must be at least one node in their paths that re-ceives both consensus processes. When this happens, one ofthe processes is allowed to progress until completion whilethe other is dropped and must be reissued later.
5.3. Updating the agreement vector
When node pk receives an agreement vector from anothernode, pw, several situations can occur.

720 EURASIP Journal on Wireless Communications and Networking
pnew1
pnew2
pnew3
p1
p3
p2
p4
p5
p6
Figure 5: Example of simultaneous starts of multiple consensus processes.
Node p3 knows that nodes
p1 and p3 were noticed
about the joining process
Only the node p1 listens
to the joining requestmade by the new node
Transmittingnode
Join requestby new node
Time
Topologymatrix
Newp3
p1 p2 p3 p4
p4 p1 p2 p3 p4 p1 p2 p3 p4 p1 p2 p3
p1
p2
p3
p4
1 2 3 41234
4 2 3 1
Figure 6: Example of the agreement vector update.
(1) If node pk is not currently engaged in any consensusprocess, that is, Ak is empty, it performs the followingoperations:(a) Ak
k = 1,(b) Ak = Ak | Aw.
(2) Otherwise, node pk is currently engaged in one on-going agreement process, that is, Ak is not empty, thenit must check whether the received vector correspondsto the same process or a different one.(a) If prock = procw, then it is the same process and
thus pk updates its vector with the received one:Ak = Ak|Aw.
(b) Else if prock < procw, the process corresponding toAk is older than the one in Aw, thus Aw is discardedwhile Ak is kept unchanged.
(c) Else if prock > procw, the process correspondingto Ak is newer than the one in Aw, thus Ak is re-placed by Aw while its previous contents are dis-carded. Moreover, the self-flag is marked, that is,Akk = 1.
The | operator in rules (1b) and (2a) means a bitwiseor and captures the knowledge that node pw has about thenodes that were already notified of the consensus process,and passes that knowledge to pk.
Rules (1a) and (2b) refer to situations in which pk is no-tified of the consensus process, marking its own flag in thevector.
In rules (2b) and (2c) an on-going process is discarded.The requester of this process will be indirectly informed ofthis situation since it will eventually receive an msync messagecontaining a different consensus process. The requester mustthen reissue the request at a time after the agreement timeof the on-going consensus process. An example of vector up-dates during an agreement process is depicted in Figure 6.
5.4. Termination of a consensus processAs mentioned in Section 5.2, the termination instant of anyconsensus process ta is set at the time the process is triggeredand it is disseminated through all the network. In the ab-sence of errors, broken links and crashes or absent nodes, itis possible to prove (presented in Section 6) that at time ta,whichever the current network topology is, the process willbe complete.
Definition 1. Given a node pi ∈ π(t) and its correspondingagreement vector Ai, the consensus process is said to be com-plete when for all i, j = 1, . . . ,n, Ai
j = 1.
The definition above means that all nodes know that aconsensus has successfully been reached by all. Therefore, theagreement property is respected and the request relative tothe consensus process is executed. However, in reality, botherrors, broken links and even crashes, can occur. Therefore,it is possible that at instant ta the consensus process is notcomplete and two situations can happen.
Firstly, consider the case in which the consensus processreached all nodes but some of them have not been notifiedof that. This means that some nodes have the A vector fullymarked while others still have a few unmarked flags. In thiscase we say the consensus process is partially complete.
Definition 2. Given a node pi ∈ π(t) and its correspondingagreement vector Ai, the consensus process is said to be par-tially complete if there exists i such that for all j = 1, . . . ,n,Ai
j = 1.
Notice that this is still a coherent situation, despite somenodes not knowing it. Therefore, those that reached the con-sensus, that is, have a fully marked A vector, execute the re-quest relative to the consensus process. On the other hand,

Dynamic Bandwidth Reservation for Mobile Robots 721
1 2 3 4 5
p1
1 2 3 4 5
p2
· · ·1 2 3 4 5
p5
(a)
1 2 3 4 5
p1
1 2 3 4 5
p2
· · ·1 2 3 4 5
p5
(b)
Figure 7: Example of errors in the vector broadcasting.
those that did not reach consensus refrain from transmittinguntil they receive an msync message. At that time they updatetheir own CRT with the one received in msync, which is prop-erly updated with the previous consensus process, and restarttransmitting. This is illustrated in Figure 7a where node p2
reach consensus and starts the new schedule, while nodes p1
and p5 stop transmitting to avoid collisions and restart later,after receiving the right CRT from node p2.
Figure 7b illustrates an impossible situation because ifnode p5 holds an empty A vector, then the 5th column ofA1 and A2 must be unmarked and thus no nodes reach theconsensus. This leads to another situation in which the con-sensus process is incomplete.
Definition 3. Given a node pi ∈ π(t) and its correspondingagreement vector Ai, the consensus process is said to be in-complete if for all i, there exists j = 1, . . . ,n, Ai
j = 0.
This situation may occur when a node crashes or departsfrom the team without being notified of the consensus pro-cess, or even in the presence of too many errors. This causesall the nodes in the team to stop transmitting leading to amajor communication disruption. To recover from this situ-ation there is a timeout that limits the maximum time thata node waits for an msync message, after which the node ini-tiates a startup procedure (see Section 8 on implementationissues) using the previous state of the CRT, that is, withoutexecuting the request.
After restart, however, it will not be possible to reach anyother agreement until the crashed or absent node is removedfrom the team. This can be carried out by using the con-nectivity matrix M referred in Section 3. In fact, a crashedor absent node is reflected in the connectivity matrix by anempty column in the respective index. Any node detectingsuch empty column within M, for a given predefined time,triggers the removal process.
Notice that a consensus process to remove such node(s)is still possible because it will not require their agreement andthe respective consensus process does not take into accountthe respective flags in vector A.
5.5. Adding new nodes
The purpose of the consensus process is to support a globalagreement on actions that have implications on global re-
sources such as bandwidth. Namely, it was designed to sup-port team formation, allowing new nodes to join, removalof nodes from the team, and changes in the global com-munication requirements. The latter two actions are trig-gered by nodes within the team. Therefore, they are al-ready included in the msync round-robin circulation andthey can submit their request when appropriate. On theother hand, the former action is triggered by the new node,that is, a node outside the team, which is not includedin the current communication schedule. Thus, a specialmechanism is required in this case, which is explained be-low.
An external node that wants to join the team must firstlisten to the system, scanning for synchronization messages.Upon reception of such a message, sent by node pk, the firsttask to be accomplished is to synchronize its clock using clkk
and the second is to examine CRTk. By inspecting this ta-ble, the joining node executes an admission control to ver-ify whether its communication requirements can be met bythe system, given the actual communication load. Upon apositive admission control, the joining node builds the sameschedule, as all the team nodes, and indicates its presence byissuing a communication request in a free scheduling slot,submitting its bandwidth requirements to the team membersthat are within its range of transmission. Any team memberthat receives the request, when it comes to its time to trans-mit the msync message, initiates an agreement process as de-scribed in Section 5.2.
Following the request, the joining node remains listen-ing, waiting for the synchronization message that carries itsrequest, which is used as an acknowledgment that the respec-tive consensus process has started. If the following msync doesnot refer to the issued request, the joining node waits until taindicated in that msync. Then, it further waits for a randomnumber of synchronization cycles to reduce collisions withother possible joining nodes, and reissues the request. Possi-ble duplicates of the request received by neighbor team nodesmay generate parallel consensus processes, but only the old-est is kept, as discussed in Section 5.3.
6. VALIDATION OF THE MODEL
In this section we present several results concerning the timetaken by the consensus process in the absence of errors,message losses and crashes or absent nodes. Moreover, wewill consider that the topology remains fixed for the dura-tion of the consensus process. Then, at the end of this sectionwe present simulation results that show the performance ofthe protocol when those assumptions do not hold. First, weintroduce the following definition.
Definition 4. The consensus process is said to have convergedif it is completed in a finite number of steps.
Lemma 5. Given two nodes pk, pw ∈ π, if there exists at leasta path from pk to pw, then the information contained in Ak
sent by node pk will be received by pw after a finite number ofsteps.

722 EURASIP Journal on Wireless Communications and Networking
Proof. When a node receives a nonempty agreement vectorfrom another node, it updates its own agreement vector bymarking the flags that are marked in the received vector (up-dating rule (1b)). In this way, the vector forwarded by thatnode will contain at least the marked flags that were alreadymarked in the received vector. Since every node transmitsonce in each synchronization round, then there will be anode that forwards the contents of Ak in each round. Sincethere exists a path from pk to pw, such data will be receivedby pw and, since the number of nodes in π is finite, then theinformation is forwarded from pk to pw in a finite number ofsteps.
Theorem 6. If for each pk ∈ π there exists at least one paththat starts from pk and crosses all the nodes in π, then the con-sensus process converges.
Proof. From the existence of a path from pk to all the othernodes, we know that any marked flag in the agreement vectorAk, broadcast by pk, will be received by every generic nodepi ∈ π. Moreover, from Lemma 5, we know that it will be re-ceived by pi in a finite number of steps. When pi receives suchflags of Ak, it marks them within its own vector Ai (updat-ing rule (1b)) and marks its self-flag Ai
i (updating rule (1a)).Similarly, all marked flags of Ai will be received by all theother nodes and also in a finite number of steps. Since thisholds for all k or i, the process can be completed (in the senseof Definition 1) in a finite number of steps, which proves thetheorem.
6.1. Upper bound on the number of stepsTo respect the termination requirement of our consensusmodel, an estimation of the number of steps needed to com-plete a consensus process must be supplied. Theorem 12gives an upper bound of such number of steps for a giventopology. It can be used only when the network topology isknown. Later in this section we introduce an upper boundthat holds for the most unfavorable topology, referred to asworst-case topology, and thus it holds equally for any possi-ble linked topology. We firstly introduce the following defi-nition.
Definition 7. Given two nodes pk, pw ∈ π, the step distance∆s(pk, pw) between pk and pw is defined as
∆s(pk, pw
) =w − k if k ≤ w,n + w − k if k > w.
(3)
The step distance introduced in Definition 7 gives thenumber of steps (i.e., synchronization periods, Tsync) re-quired to have pw transmitting the msync message after thetime at which pk transmitted it.
Lemma 8. For all i, j(1 ≤ i, j ≤ n ∧ i = j), ∆s(pi, pj) +∆s(pj , pi) = n.
Proof. The proof follows directly from Definition 7.
Lemma 9. For all k,w = 1, . . . ,n, ∆s(pk, pw) ≤ n− 1.
Proof. If k = w, then ∆s(pk, pw) = 0 ≤ n. If k = w, then∆s(pw, pk) ≥ 1 and ∆s(pk, pw) ≤ n− 1, from Lemma 8.
Definition 10. Let pk ≡ pm1 → ·· · → pms−1 → pms ≡ pw be apath from pk to pw. The following distances are defined:
∆hop(pk, pw
) = s− 1,
∆t(pk, pw
) = s−1∑i=1
∆s(pmi , pmi+1
),
∆r(pk, pw
) = s−2∑i=1
∆s(pmi , pmi+1
).
(4)
The distance ∆hop(pk, pw) denotes the number of hopsrequired to transmit a piece of information from pk to pw.The distance ∆t(pk, pw) specifies the number of steps re-quired to have pw transmitting after it received an informa-tion that was initially sent by pk. The distance ∆r(pk, pw)specifies the number of steps required for pw to receive aninformation that was initially sent by pk. Note that such in-formation is sent to pw ≡ pps from node pps−1 .
Definition 11. Let π be a network with a connectivity matrixM. We say that µhop(π,M) is the maximal distance (or diam-eter) in the network between two nodes if and only if for alli, j = 1, . . . ,n, ∆hop(pi, pj) ≤ µhop(π,M).
Theorem 12. Let π be a network with a fixed connectivity ma-trix M. If the communication between the nodes is bidirec-tional, then the number of steps required to complete a con-sensus process is σ(π,M) ≤ 2(n− 1)µhop(π,M).
Proof. Let pk be the node that triggers the consensus pro-cess and let pw be the last node that receives that informa-tion from pk. Under this assumption, Aw is the last vectorto be updated to a non-null value. It takes no more than(n − 1)µhop for pw to transmit its Aw vector after receivinga vector with the kth flag marked. This is true because theworst case is when pk and pw are at the extremal sides of thelongest path in the network, for which ∆hop(pk, pw) = µhop
from Definition 11 holds. Moreover, the maximum amountof steps needed to have a generic node transmitting after thetransmission of a node directly linked to it is n − 1 fromLemma 9. Note that if pk is not placed at the extremal sideof the longest path, because it is in the middle of such apath or even at the extremal side of a shorter path, then∆hop(pk, pw) ≤ µhop. When pw receives a vector with the kthflag marked, it updates its vector and later transmits it, in theright synchronization cycle. After that cycle, no more than(n − 1)µhop steps are required to propagate its informationto all the other nodes. In particular, let pz be the last nodethat completes its own vector, then ∆hop(pw, pz) ≤ µhop forthe same reasons as above. Summing the contributions of thetwo-way broadcasts, that is, (n− 1)µhop + (n− 1)µhop, yieldsthe following bound σ(π,M) ≤ 2(n− 1)µhop(π,M).
Since pw is the last node receiving the flags informationfrom pk, when pw starts to broadcast its updated vector allthe other nodes have already received those flags from pk and

Dynamic Bandwidth Reservation for Mobile Robots 723
p1 p2 p3 pn−2 pn−1 pn
Figure 8: Worst-case network topology.
they have already started to broadcast their updated vectorstoo. This assures that the flags broadcast by a generic nodepi ∈ π are received by all the other nodes in the networkbefore the flags from pw are received by pz. This results fromthe assumption that pw is placed at the extremal side of thelongest path, yielding, for all pi ∈ π,∆hop(pi, pz) . . ..
Definition 13. The worst-case network topology for a givennumber of nodes n is the one in which a consensus processtakes the highest number of steps to complete.
Theorem 14. If the communication among the nodes is bidi-rectional, then the worst-case network topology is the one inwhich there is a single path pk ≡ pm1 ↔ ·· · ↔ pms−1 ↔ pms ≡pw where s = n, for all mi,mj(1 ≤ mi,mj ≤ n ∧ mi = mj),ms = ms−1 + 1, and the consensus process is triggered by nodepms ≡ pw. In this case, the number of steps required to completea consensus process can be as high as
S(n) = n2 − n− 1. (5)
Proof. The topology depicted in Theorem 14 is a lineartopology including all the nodes of the network (Figure 8).This is the worst-case topology because it implies the longestpossible path with a given number of nodes (µhop = n − 1).Any other topology would imply the existence of forkingnodes, that is, nodes connected to more than two nodes. Insuch circumstances, the time to propagate any informationfrom one extreme to the other can only be shorter. This isbecause, on the one hand µhop < n − 1, necessarily, and onthe other hand, after the forking node, the information flowsin parallel over more than one link and thus, faster.
If the node that starts the process is node pms ≡ pw,which lies at one extremal side of the path, to complete theprocess the information must first reach pk ≡ pm1 , whichcompletes vector Ak, and then return back to pw to allow itto also complete its vector Aw. This is the longest path thatthe information must cross. In this situation, from Lemma 8we know that n steps are needed to cross a one-hop path inboth directions, so n(n− 1) are needed to cross all the pathsforward and backward from pw to pk. The last steps in theprocess, from ms−1 to ms, can be avoided, since the processcompletes as soon as ms−1 transmits and ms receives, thatis, no need to wait for ms to transmit. The lowest numberof steps that can be saved is 1, and it can only be achievedif ms = ms−1 + 1. Summing all the contributions, we haven(n− 1)− 1 = S(n).
Notice that the bound given by Theorem 14 depends onlyon n and it establishes the absolute maximum number ofsteps that a consensus process may take with any topology
2(n− 1)µpos
n2 − n− 1
1 2 3 4 5 6 7 8 9 10 11 12
µhop
0
20
40
60
80
100
120
140
160
180
Nu
mbe
rof
step
s
1119
29
41
55
71
89
109
131
155
n = 4n = 5
n = 6
n = 7
n = 8
n = 9
n = 10
n = 11
n = 12
n = 13
Figure 9: The bound as a function of the number of nodes and ofthe longest path in the network.
and it is thus very practical. However, when µhop n, thatbound is also very pessimistic. Is such circumstances, thebound given by Theorem 12 is substantially tighter. Never-theless, using this bound requires knowing µhop for the cur-rent topology, which can be determined inspecting the Mmatrix.
Therefore, a better solution can be achieved by defininga new bound that corresponds to the lowest one, for eachn, between the two ones previously referred to. Such an im-proved bound is illustrated in Figure 9 where, for each n, themaximum number of steps is presented as a function of µhop.
As an application example, consider the situation de-picted in Figure 5. In that case, n = 6 and thus, apply-ing Theorem 14, we know that any consensus process for 6robots will terminate at most after S(6) = 29 synchroniza-tion steps. However, for that topology we know that µhop = 2.Thus, applying Theorem 12, we deduce a tighter bound givenby 2(n− 1)µhop(π,M) = 20 steps.
7. SIMULATION RESULTS
This section shows separate results for the agreement processand the topology management approach.
7.1. Agreement process
In order to assess the performance of the protocol, includ-ing when the nodes move and there are omissions of syn-chronization messages, we carried out several extensive sim-ulations. The results concerning the number of steps actu-ally taken to reach consensus are shown in Figure 10, us-ing the maximum of at least 100.000 random topologies foreach point. The topologies were generated considering twomajor cases, 6 nodes and 12 nodes, and always being fully

724 EURASIP Journal on Wireless Communications and Networking
No move, error = 0%Move = 2/6, error = 0%Move = 4/6, error = 0%
No move, error = 10%No move, error = 20%
0 0.2 0.4 0.6 0.8 1
R
0
5
10
15
20
25
2930
Step
(a)
No move, error = 0%Move = 4/14, error = 0%Move = 8/14, error = 0%
No move, error = 10%No move, error = 20%
0 0.2 0.4 0.6 0.8 1
R
0
20
40
60
80
100
120
131140
Step
(b)
Figure 10: Simulation results with different combinations of mobility and errors: (a) n = 6, (b) n = 12.
connected. In order to classify the generated topologies weused R, the redundancy level of the network. This is definedas the ratio between the actual number of links of a giventopology over the maximum number of links for the sameset of nodes. Both terms of the ratio only count the links be-yond the minimum required to keep the network fully con-nected. R varies between 0 and 1 and gives an indication ofthe number of redundant paths that a given topology con-tains. R is similar to the inverse of µhop, that is, the larger R is,the shorter the maximal distance in the network is, and weused it for the sake of convenience in the generation of thetopologies.
The lower curves show the number of steps in a favor-able scenario, with absence of errors and steady topologyduring the consensus process. In both major cases (n = 6and n = 12), the number of steps actually reaches the up-per bound for the case of R = 0, as expected, confirming thebound accuracy. As R increases, the number of required stepsto reach a consensus rapidly decreases.
Then, we assessed the protocol under nodes mobility.The velocity of changes was roughly characterized by move =X/Y . This means that X links were either broken or cre-ated in the connectivity matrix every Y steps during a con-sensus process. For n = 6, the results with R = 0 and0.2 show that there were incompleted or partially completedprocesses (marked with a circle in the graph). For n = 12,such situation happened for R = 0 only. For higher valuesof R, all processes reached consensus within the S(n) upperbound.
Table 1 presents, in the last two columns, the actualpercentage of processes that did not complete within thebound (partially completed plus incompleted), and thosethat terminated incompleted, respectively, only for the cases
in which those values were nonzero. The values show thatsuch percentage is already low for R = 0, becoming extremelylow for R = 0.2 and zero for higher values. The column on“max no. of vectors not completed” shows for every processthe maximum number of vectors that did not reach consen-sus (this equals n when there were incompleted processes).
We also assessed the protocol behavior under omis-sions of the synchronization messages, according to the faultmodel in Section 3. Therefore, for each n under test, we gen-erated two cases: one case with 10% of random omissionswith respect to the total number of synchronization messagesin the process, and another case with 20% omissions. The re-sults in terms of number of steps also show that for smaller Rthere are some incompleted or partially completed processes,as expected. Table 1 shows the actual numbers of not com-pleted and incompleted processes.
The experiments show the robustness of the proposedprotocol since, even in presence of relatively high mobilityand errors, the consensus process completes within the S(n)bound with a very high probability for R > 0. When it doesnot, the probability of terminating incompleted, which is thesituation that generates greater disturbance, is very low, sincemost of such processes actually complete, but partially, only.This is expected because of the flooding nature of the proto-col that makes use of all parallel paths in the topology. Thus,as long as there are some redundant paths, the resilience ofthe protocol increases substantially.
Finally, the results also show that increasing the numberof nodes in the network increases its resilience to errors andmobility. This can be explained by the fact that for highernumber of nodes, the unfavorable topologies correspondingto R = 0 become less and less probable. Also, for the same R,there will be more redundant links if n is larger.

Dynamic Bandwidth Reservation for Mobile Robots 725
Table 1: Simulations results.
n R ChangesErrors Max Max no. of vectors Average partially Average
(%) steps not completed completed (%) incompleted (%)
6 0 2/6 0 29∗ 6 0.0739 0.0006
6 0 4/6 0 29∗ 6 0.1169 0.0028
6 0.2 2/6 0 29∗ 1 0.0001 0
6 0.2 4/6 0 29∗ 1 0.0001 0
6 0 0 10 29∗ 6 21.2620 18.2583
6 0 0 20 29∗ 6 68.8619 35.6228
6 0.2 0 10 29∗ 4 0.0769 0
6 0.2 0 20 29∗ 6 1.5485 0.0003
6 0.4 0 10 29∗ 1 0.0026 0
6 0.4 0 20 29∗ 2 0.0034 0
12 0 4/14 0 131∗ 12 0.0618 0.0020
12 0 8/14 0 131∗ 12 0.0048 0.0040
12 0 0 10 131∗ 8 0.3849 0
12 0 0 20 131∗ 12 1.9560 0.0150
7.2. Connectivity tracking
In what concerns the topology management, we carried outa set of experiments to characterize the performance of theconnectivity tracking system, trying to assess how fast thesystem can converge to the correct topology upon a change,and for how long, given a mobility model, the node connec-tivity matrix matches the correct one.
In a first set of experiments we addressed the speed ofconvergence to the correct topology, after a change in the net-work links. A set of nodes (n is equal to 6 and 12 in Figures 11and 12, resp.) is randomly deployed in the environment. Theposition of the nodes is fixed, the network is fully connectedand characterized by a given redundancy level R that variesfrom 0 to 1 in steps of 0.2 units.
In order to also test the speed of convergence in an ini-tial state with an empty connectivity matrix, all nodes in thisexperiment start with their matrices cleared. Then, we firstlymeasure the number of steps needed to make all nodes ma-trices converge to the real network topology. These results aredisplayed in the graphs of Figures 11a and 12a. After that, arandomly chosen node is forced a crash, meaning that it stopstransmitting until the end of the simulation. In this case wemeasure the number of steps needed to converge to the newtopology. These measurements are displayed in Figures 11band 12b. All the graphs are “box-and-whisker” plots for mul-tiple redundancy level settings with a given number of nodes.They include the median values, which appear inside a rect-angle that represents the number of measures between thefirst and third quartiles, as well as a pair of bars connectingthe extreme values.
The first observation is that the number of steps neededto reach the right matrix is always lower than the worst-casebound obtained for an agreement process. This means thatthe topology management approach can be effectively usedto monitor absent or crashed nodes during an agreementprocess, eliminating the problem of the communication dis-
ruption described in Section 5.4: if a node can not completethe agreement vector (i.e., due to crashes), it can consider theagreement as reached if it detects the absence of the nodesthat did not participate in the process.
As we expected, the maximum and the median numberof steps needed to converge decreases quadratically with theredundancy level of the network for the first part of the ex-periment (graphs on the left side). In the same graphs, theminimum values present an interesting anomaly: for redun-dancy levels of 40%, 60%, and 80%, they are lower than thevalue for the best connectivity scenario (R = 100%). Thiscan be easily understood realizing that, for R = 100%, a fixednumber of steps is needed to make all the nodes converge (ex-actly 2n − 1 steps), and that the cells in the correct connec-tivity matrix are all marked. For lower but sufficiently highredundancy levels, the distance between the farthest nodes inthe network is still low and many cells in the correct connec-tivity matrix are not marked. Since each node starts from anempty connectivity matrix, it can happen that all the rightcells become marked in a number of steps lower than thatrequired to mark all the cells.
Notice that, once the connectivity matrix converged, thenumber of steps needed to reconstruct the topology after anode crash is less, in the average, than that needed for build-ing the connectivity information from scratch. This phe-nomenon is illustrated in Figures 11b and 12b, which showthe number of steps required for convergence after a nodecrash. Notice that the speed of convergence after a crash de-pends on several factors, such as the position of the crashednode (which could cause the network to split into two ormore subnetworks) and the interval between the time ofcrash and the next slot allocated to the crashed node.
7.3. Mobility test for the connectivity tracking methodWhile in the previous section we addressed the speed ofconvergence of our topology management system upon an

726 EURASIP Journal on Wireless Communications and Networking
MaxQuartile 3Median
Quartile 1Min
0 20 40 60 80 100
R (%)
6
8
10
12
14
16
18
20
22
24
26
28N
um
ber
ofst
eps
(a)
MaxQuartile 3Median
Quartile 1Min
0 20 40 60 80 100
R (%)
6
8
10
12
14
16
18
20
22
24
26
28
Nu
mbe
rof
step
s
(b)
Figure 11: Box-and-whisker plots for the random crash test with multiple redundancy configuration settings with n = 6.
MaxQuartile 3Median
Quartile 1Min
0 20 40 60 80 100
R (%)
10
20
30
40
50
60
70
80
90
100
110
120
Nu
mbe
rof
step
s
(a)
MaxQuartile 3Median
Quartile 1Min
0 20 40 60 80 100
R (%)
10
20
30
40
50
60
70
80
90
100
110
120
Nu
mbe
rof
step
s
(b)
Figure 12: Box-and-whisker plots for the random crash test with multiple redundancy configuration settings with n = 12.
instantaneous change in the network, which remained sta-ble after that change, in this section we address the behav-ior of the system with a dynamic topology as it is the casewith moving nodes. We assumed that the nodes are movingas specified by the Gauss-Markov mobility model, which wasfirstly introduced in [23]. We also tested the protocol withother mobility models available in the literature, like randomway point proposed in [24] and its variations in [25], butwe show results for the Gauss-Markov model only, becauseit generates more adequate velocity patterns, with smoothvariations in the speed and direction of the nodes. We as-
sumed a variable number of nodes moving in a squaredarea of 50 × 50 m. Two values were considered for the speedof the nodes, 1 m/s and 2 m/s, which are reasonable valuesfor robot’s motion scenarios. For the radius of transmissionranges, we considered three different values, 10 m, 25 m, and45 m. The standard deviation for the speed and the angle inthe Gauss-Markov model were 0.1 m/s and π/8, respectively.Finally, the synchronization message is assumed to be broad-cast every 50 milliseconds, which is a good compromise be-tween bandwidth utilization and management informationrefreshing rate. Notice that decreasing such a value (down

Dynamic Bandwidth Reservation for Mobile Robots 727
MaxQuartile 3Median
Quartile 1Min
4 5 6 7 8 9 10 11 12
n
1
10
100
1000
10 000St
ep
20
121
33324
75
17
76
19722
66
12
55
135
1849
10
42
105
1210
9
35
89
1355
8
31
77
1137
8
27
66
817
7
25
61
769
7
23
55
594
(a)
MaxQuartile 3Median
Quartile 1Min
4 5 6 7 8 9 10 11 12
n
0
20
40
60
80
100
120
Step
23
13
34
22
46
32
57
43
58
52
69
108
710
93
711
98
812
96
(b)
Figure 13: “Box-and-whisker” plots for the mobility test with speed of 1 m/s, transmission radius of 25 m, and different values of n.
to 10 milliseconds is practical) involves a faster updating fre-quency, thus leading to better results in all the tests that wereperformed.
To evaluate the performance of the connectivity track-ing algorithm we let the system run for a time of 5–7 hours,which is rather long if compared with the timing character-istics involved. At every updating step we compared the con-nectivity matrices owned by all the nodes and the instanta-neous real topology of the network. For every node, we ob-tained a temporal sequence (with granularity equal to thesynchronization period) of similarity values. By convention,we consider a value of 0 meaning that a connectivity matrixrepresents exactly the real network topology, and 1 elsewhere.So, notice that even if only one link does not match the realtopology, the matrix is considered to be wrong. Notice alsothat such a link may often be irrelevant for the packet rout-ing or the support to the agreement process, especially with ahigh number of nodes in the network. At this point, we mea-sured the length of the chains made by sequences of iden-tical values. A sequence of 0 values indicates a time periodof stability for the connectivity matrix, and the length mea-sures the time that the connectivity matrix remains stable. Asequence of 1 values indicates a period of instability for thematrix.
The distribution of the lengths of the sampled sequencesis reported in Figure 13. In particular, the two graphs showthe distributions for the chains of matching sequences(Figure 13a) and nonmatching sequences (Figure 13b). Wefirst describe the graph in Figure 13a. The fact that there ex-ist stability sequences with very different length (the mini-mum length is 1) is an undesirable property of the distribu-tion, because short times of stability involve little chance tohave a right view of the network for a sufficiently long time(which is useful for routing). The values of the first quar-
tile show that only 25% of the sequences are too short to beuseful, while the remaining (75%) could be considered longenough to be used for the path prediction or to support theagreement process. We can also notice how all the values, inparticular the median and the quartile values, decrease as thenumber of nodes is incremented. The reason is that, as thenumber of the nodes increases, both the probabilities for alink establishment and disruption during the node motionincrease. It is worth observing that the negative effect of anonmatching link has more influence when the number ofnodes is low. In this sense, our statistics can be consideredvery pessimistic, leaving space to further improvements fornetworks with high number of nodes.
Figure 13b reports the statistics about the sequences ofnonmatching matrices. It is relevant that, despite that themaximum length of a nonmatching sequence is in the orderof n2, the values of the third quartiles indicate that the 75%of the sequences have a length less than or equal to n.
In order to have an overall view of the topology dur-ing nodes motion, the results of both graphs can bemerged and compared. Basically, the sequences of match-ing/nonmatching chains are typically made by very longmatching chains ending in very short nonmatching chains.Within such a general behavior, short matching chains andfew relatively long nonmatching chains can be found.
The global behavior of the algorithm and the proposedround-robin approach is summarized in Figure 14, which il-lustrates the percentage of time during which the connectiv-ity matrices can be considered reliable for different speedsand communication ranges. Results with solid lines sum allthe contributions from the matching chains (without con-sidering the length), whereas those with dotted lines takeinto account the sum of the contributions of the chains withlength greater than 2n, for a given n. They are a more reliable

728 EURASIP Journal on Wireless Communications and Networking
v = 1 m/s, rad = 10 mv = 1 m/s, rad = 25 mv = 1 m/s, rad = 45 mv = 2 m/s, rad = 25 m
v = 1 m/s, rad = 10 mv = 1 m/s, rad = 25 mv = 1 m/s, rad = 45 mv = 2 m/s, rad = 25 m
4 5 6 7 8 9 10 11 12
n
45
50
55
60
65
70
75
80
85
90
95
100To
polo
gym
atri
xst
abili
ty(%
)
Figure 14: Percentage of time in which the connectivity matrix isstable during the mobility test as a function of n. Solid lines sumthe contributions from matching chains, whereas dotted lines sumthose chains with length greater than 2n.
estimate of the quality of the topology approximation, andcould be particularly useful for packet routing.
The curves highlight the higher influence of the nodespeed with respect to the transmission range. Such a behav-ior has been observed in several simulation experiments, notreported in this paper for lack of space.
Different transmission ranges were considered in the ex-periment: a short range of 10 m (20% of the 50× 50 m mov-ing area), a medium range of 25 m (50%) and a long rangeof 45 m (90%). The worst-case situation was observed for amedium range. This can be explained considering that fora short transmission range the nodes are isolated most ofthe time, whereas for a long range they are strongly con-nected most of the time. In fact, in these two extreme situ-ations, the links are kept in the same state (broken or estab-lished) for long periods, thus the length of the stable chainsis longer.
The strictly decreasing trend of the curves outlines thedependency of our approach on the number of nodes. This is,again, related to the time required to complete a full round oftransmissions of the synchronization message, which is pro-portional to the number of nodes.
8. IMPLEMENTATION ISSUES
To deploy the protocol proposed in this paper there are sev-eral additional aspects to consider. One regards clock syn-
chronization, which is fundamental to support the properfunctioning of implicit EDF. The method to achieve clocksynchronization, however, is independent of our protocoland several possibilities exist, for example, the fault-tolerantaverage algorithm used in TTP/C, the IEEE 1588 standard(master-slave), or even GPS whenever the operational envi-ronment allows its usage.
Another aspect concerns handling inconsistencies in theEDF schedulers that may arise for some unforeseen reason.To detect them, the CRTs are transmitted with a timestampof the last update. Therefore, whenever a node receives, thereceived table is more up to date than its own. In that case,it replaces its CRT with the one just received and continuesoperation.
The startup procedure is another practical aspect of ma-jor importance. In the current stage, a special node, calledthe team leader, starts transmitting its synchronization mes-sage after detecting silence for longer than a given timeout.This allows other waiting nodes to join, one by one, buildingup the team. However, to prevent the single point of failureformed by the team leader, a fully distributed startup proce-dure with automatic election of team leader is currently be-ing designed.
Finally, it is also necessary to set the protocol operationalparameters. Two fundamental parameters are Ttick (the slotduration) and Tsync (the synchronization step). The formerhas a deep impact on the protocol data efficiency because, ifit is much larger than the average length of the messages tobe transmitted, a substantial part of the bandwidth is wasted.On the other hand, if it is too short, each message will alwaysrequire the use of several slots, being broken into several slotpackets and increasing the protocol overhead. Moreover, Ttick
must include a guarding window between consecutive slotsto account for possible clock drifts among nodes. The dura-tion of this window should be equal to twice the precisionachieved by the clock synchronization.
Consider a transmission rate of 1 Mbps, which is becom-ing typical with modern RF transceivers such as the modelCC2400 of Chipcon, used in Bluetooth devices. With a clockprecision of 50 microseconds, we can define guarding win-dows of 100 microseconds. If we define Ttick=1 milliseconds,we can transmit 900 bits per Ttick. Using 2-byte cyclic re-dundancy code (CRC), 2-byte message identifer, plus 2-bytepreamble and control results in 48 bits of protocol controlinformation, leaving 852 bits, or 106 bytes for data payload.This value seems a good compromise for a variety of applica-tions and, if it is still too large, then nodes can aggregate datainto one single message to make a more efficient use of thebandwidth.
In what concerns Tsync, it impacts directly on the reactiv-ity of the system to global change requests. In fact, Tsync es-tablishes the synchronization step, and thus the duration ofthe consensus processes is directly proportional to this value.Moreover, Tsync also determines the overhead introduced bythe periodic transmission of msync.
If a value of Tsync = 20 milliseconds is used, then, fora team of 10 units a consensus process would take around2 seconds to complete. The adequacy of this value has to be

Dynamic Bandwidth Reservation for Mobile Robots 729
considered with respect to a specific application. As for theoverhead introduced by the msync message, one needs firstto determine its size. Recall that msync includes the followingdata structures: CRT, M, A, and clk. As an indicative exam-ple, consider that the team currently involves 10 nodes andthe total number of messages in the CRT is 15. For each mes-sage there is an identifier, length, period, deadline, and off-set, all expressed in slots, for example, using 1 byte for thefirst two and 2 bytes for the remaining ones. This means theCRT takes 120 bytes. The M matrix is a 10 × 10 bit struc-ture, requiring 13 bytes. The A vector takes 10 bits, requiring2 bytes. The clk includes a 4-byte slot counter plus an 8-byterepresentation of continuous time. There is still a timestamp(slot counter) associated with the CRT, taking extra 4 bytes.Altogether, this results in 151 bytes. Using the message pay-load of 106 bytes per slot as suggested above, the synchro-nization data takes 2 slots. With a Tsync = 20 milliseconds,this means 10% of the bandwidth dedicated to the synchro-nization mechanisms. If this is excessive in the scope of anapplication, then it is necessary to search for a better compro-mise between the overhead and the reactivity of the system,for example, increasing Tsync.
In order to facilitate the deployment of our protocol, itis also possible to build it on top of IEEE 802.11 for exam-ple. This allows taking advantage of the framing of the PDUsas well as of the respective physical layer. In this case, broad-cast frames should be used, which are single frames trans-mitted without acknowledgment or RTS/CTS channel reser-vation. Indeed, these features are not needed as our proto-col enforces colision-free transmission by means of sychro-nization and the bandwidth is reserved by the EDF sched-uler. When compared to 802.11 DCF communication, ourprotocol requires the additional transmission of the msync
message, which adds to its overhead. The use of fixed framesize also has a potential to increase the overhead of our pro-tocol, requiring the transmission of several frames to con-vey an amount of data that would fit within a single stan-dard 802.11 frame. The guarding windows, which depend onthe achievable precision of the clock synchronization, mayalso contribute to insert extra idle time between the trans-mission of consecutive frames in our protocol. On the otherhand, we are able to provide real-time communication, while802.11 DCF is not, particularly with high-bandwidth utiliza-tion levels.
9. CONCLUSIONS
In this paper we proposed a new MAC level protocol toschedule real-time communications in a network of roboticmobile units over a wireless medium. It is based on the im-plicit EDF scheduling algorithm, which is collision-free, thusallowing high utilization of the medium bandwidth. Theprotocol addresses the problem of having a team of fully-connected, but not fully linked network units and toleratesthe presence of hidden nodes, either caused by excessive linklengths or by the presence of obstacles. The protocol usesglobal resource reservation to support dynamic changes in
the global communication requirements under guaranteedtimeliness. These changes may arise from external nodes thatwish to join the team, from nodes that leave the team, ei-ther voluntarily or inadvertently (crash or movement), orfrom requests to change the current communication require-ments.
The global resource reservation is based on a specific con-sensus process that uses periodic dissemination of systemstate information. The main contributions of this work arethe adaptation of implicit EDF for a dynamic environmentand the design and analysis of the consensus process, includ-ing the determination of bounds for the maximum requirednumber of steps to complete. The paper includes simulationresults that show the effectiveness of the protocol even undertransmission errors and nodes mobility.
Our approach also integrates a connectivity tracking sys-tem that is proposed to support the resource reservationphase. It can also be used as basic component for an efficientpacket routing strategy on top of the proposed MAC levelcommunication protocol.
The protocol is meant for small sets of mobile units, typ-ically between 10 and 20. However, it can be integrated intoa hierarchical scalable routing framework, at the cell or zonelevel.
A positive characteristic of the proposed solution is thatthe period used for broadcasting system state informationcan be tuned to balance reactivity of the resource reserva-tion mechanism and its bandwidth requirements. In fact, thelonger the synchronization period, the longer the time re-quired to agree on a decision, but the smaller the bandwidthrequired to transmit the system data.
The framework within which this work developed in-cludes current and future work to deal with the issues ofclique formation, message routing, topology management,and scalability. Particularly, there is a substantial attentiondedicated to the use of the connectivity matrix to supportrouting of data messages, topology management controllingthe movement of the robots to prevent R = 0 topologies, andmanagement of channel reutilization to improve bandwidthefficiency.
REFERENCES
[1] Z. J. Haas, J. Deng, B. Liang, P. Papadimitratos, and S. Sajama,“Wireless ad hoc networks,” in Wiley Encyclopedia of Telecom-munications, J. G. Proakis, Ed., John Wiley & Sons, New York,NY, USA, December 2002.
[2] C. E. Perkins, Ad Hoc Networking: an Introduction, Addison-Wesley, Boston, Mass, USA, 2001.
[3] R. Grabowsky, L. E. Navarro-Serment, C. J. J. Paredis, andP. K. Khosla, “Heterogeneous teams of modular robots formapping and exploration,” Autonomous Robots, vol. 8, no. 3,pp. 293–308, 2000.
[4] J. Wu and I. Stojmenovic, “Ad hoc networks,” IEEE Computer,vol. 37, no. 2, pp. 29–31, 2004.
[5] J. A. Stankovic, T. E. Abdelzaher, C. Lu, L. Sha, and J. C. Hou,“Real-time communication and coordination in embeddedsensor networks,” Proc. IEEE, vol. 91, no. 7, pp. 1002–1022,2003.

730 EURASIP Journal on Wireless Communications and Networking
[6] J.-D. Decotignie, “Wireless fieldbusses—a survey of issues andsolutions,” in Proc. 15th IFAC World Congress on AutomaticControl, Barcelona, Spain, July 2002.
[7] B. Hughes and V. Cahill, “Achieving real-time guarantees inmobile ad hoc wireless networks,” in Proc. Work-in-ProgressSession of 24th IEEE Real-Time Systems Symposium (RTSS’03), pp. 37–40, Cancun, Mexico, December 2003.
[8] M. Gerharz, C. de Waal, M. Frank, and P. Martini, “Link sta-bility in mobile wireless ad hoc networks,” in Proc. 27th An-nual IEEE Conference on Local Computer Networks (LCN ’02),pp. 30–39, Tampa, Fla, USA, November 2002.
[9] T. Srinidhi, G. Sridhar, and V. Sridhar, “Topology manage-ment in ad hoc mobile wireless networks,” in Proc. Work-in-Progress Session of 24th IEEE Real-Time Systems Symposium(RTSS ’03), pp. 29–32, Cancun, Mexico, December 2003.
[10] S. H. Shah, K. Chen, and K. Nahrstedt, “Dynamic bandwidthmanagement in single-hop ad hoc wireless networks,” MobileNetworks and Applications, vol. 10, no. 1-2, pp. 199–217, 2005.
[11] N. H. Vaidya, P. Bahl, and S. Gupta, “Distributed fair schedul-ing in a wireless LAN,” in Proc. 6th Annual ACM InternationalConference on Mobile Computing and Networking (MobiCom’00), pp. 167–178, Boston, Mass, USA, August 2000.
[12] N. Johansson, U. Korner, and P. Johansson, “Performanceevaluation of scheduling algorithms for bluetooth,” in Broad-band Communications: Convergence of Network Technologies,H. K. T. Danny and J. K. Paul, Eds., Kluwer Academic, HongKong, China, pp. 139–150, November 1999.
[13] M. Caccamo, L. Y. Zhang, L. Sha, and G. Buttazzo, “An im-plicit prioritized access protocol for wireless sensor networks,”in Proc. 23rd IEEE Real-Time Systems Symposium (RTSS ’02),pp. 39–48, Austin,Tex, USA, December 2002.
[14] M. Pease, R. Shostak, and L. Lamport, “Reaching agreementin the presence of faults,” Journal of the ACM, vol. 27, no. 2,pp. 228–234, 1980.
[15] D. Dolev, C. Dwork, and L. Stockmeyer, “On the minimalsynchronism needed for distributed consensus,” Journal of theACM, vol. 34, no. 1, pp. 77–97, 1987.
[16] T. D. Chandra and S. Toueg, “Unreliable failure detectorsfor reliable distributed systems,” Journal of the ACM, vol. 43,no. 2, pp. 225–267, 1996.
[17] J. Turek and D. Shasha, “The many faces of consensus in dis-tributed systems,” IEEE Computer, vol. 25, no. 6, pp. 8–17,1992.
[18] X. Defago, A. Schiper, and P. Urban, “Total order broadcastand multicast algorithms: taxonomy and survey,” ResearchRep. IS-RR-2003-009, Japan Advanced Institute of Scienceand Technology, Ishikawa, Japan, September 2003.
[19] T. Facchinetti, G. Buttazzo, M. Caccamo, and L. Almeida,“Wireless real-time communication protocol for cooperatingmobile units,” in Proc. 2nd International Workshop on Real-Time LANs in the Internet Age (RTLIA ’03), Porto, Portugal,July 2003.
[20] C. L. Liu and J. W. Layland, “Scheduling algorithms for mul-tiprogramming in a hard-real-time environment,” Journal ofthe ACM, vol. 20, no. 1, pp. 46–61, 1973.
[21] J. A. Stankovic, M. Spuri, K. Ramamritham, and G. But-tazzo, Deadline Scheduling for Real-Time Systems: Edf andRelated Algorithms, Kluwer Academic, Boston, Mass, USA,1998.
[22] A. V. Aho, J. E. Hopcroft, and J. D. Ullman, The Design andAnalysis of Computer Algorithms, Addison-Wesley, Reading,Mass, USA, 1983.
[23] B. Liang and Z. J. Haas, “Predictive distance-based mobilitymanagement for PCS networks,” in Proc. 18th Annual JointConference of the IEEE Computer and Communications Soci-
eties (INFOCOM ’99), vol. 3, pp. 1377–1384, New York, NY,USA, March 1999.
[24] C. Bettstetter, “Smooth is better than sharp: a random mo-bility model for simulation of wireless networks,” in Proc. 4thACM International Workshop on Modeling, Analysis and Simu-lation of Wireless and Mobile Systems (MSWiM ’01), pp. 19–27,Rome, Italy, July 2001.
[25] C. Bettstetter and C. Wagner, “The spatial node distributionof the random waypoint mobility model,” in Proc. 1st GermanWorkshop on Mobile Ad-Hoc Networks (WMAN ’02), pp. 41–58, Ulm, Germany, March 2002.
Tullio Facchinetti is a 2001 computer sci-ence graduate from the Informatic Engi-neering Department, University of Pavia(Italy). He is currently waiting to defend hisPh.D. thesis, which was cotutored by Uni-versities of Pavia (Italy) and Aveiro (Portu-gal), where he spent 6 months in 2004 re-searching on distributed wireless commu-nication algorithms. During his Ph.D., healso worked at national and internationalprojects funded by the Italian Ministry of University and Re-search and by the European Community. His main research in-terests are on real-time wireless communication, distributed sys-tems, sensor networks, mobile units coordination, and neural net-works.
Giorgio Buttazzo is an Associate Professorof computer engineering at the Universityof Pavia, Italy. He graduated with a majorin in electronic engineering at the Univer-sity of Pisa in 1985, received a Masters de-gree in computer science from the Univer-sity of Pennsylvania in 1987, and a Ph.D.degree in computer engineering from theScuola Superiore S. Anna of Pisa in 1991.During 1987, he worked on active percep-tion and real-time control at the GRASP Laboratory, Universityof Pennsylvania, Philadelphia. From 1991 to 1998, he held a posi-tion of Assistant Professor at the Scuola Superiore S. Anna of Pisa,doing research on robot control systems and real-time scheduling.His main research interests include real-time operating systems, dy-namic scheduling algorithms, quality of service control, multime-dia systems, advanced robotics applications, and neural networks.He is a Senior Member of the IEEE and the IEEE Computer Society.
Luis Almeida is an Assistant Professor at theDepartment of Electronics and Telecom-munications, University of Aveiro, Portugal,since 1999. He is also a Senior Researcherat the IEETA research unit of the same uni-versity. Formerly, he was a design engineerin a company producing digital telecom-munications equipment. He received a de-gree in electronics and telecommunicationsengineering in 1988 and a Ph.D. degree inelectrical engineering in 1999, both from the University of Aveiro.His research interests lie in the fields of real-time networks for dis-tributed industrial/embedded systems and navigation control formobile robots.

EURASIP Journal on Wireless Communications and Networking 2005:5, 731–742c© 2005 Keun-Ho Lee et al.
Authentication Based on Multilayer Clusteringin Ad Hoc Networks
Keun-Ho LeeDepartment of Computer Science & Engineering, Korea University, 1, 5-Ga, Anam-dong, Sungbuk-ku, Seoul 136-701, KoreaEmail: [email protected]
Sang-Bum HanDepartment of Computer Science & Engineering, Korea University, 1, 5-Ga, Anam-dong, Sungbuk-ku, Seoul 136-701, KoreaEmail: [email protected]
Heyi-Sook SuhDepartment of Computer Science & Engineering, Korea University, 77-6 Sejong-ro, Jongro-gu, Seoul 110-760, KoreaEmail: [email protected]
SangKeun LeeDepartment of Computer Science & Engineering, Korea University, 1, 5-Ga, Anam-dong, Sungbuk-ku, Seoul 136-701, KoreaEmail: [email protected]
Chong-Sun HwangDepartment of Computer Science & Engineering, Korea University, 1, 5-Ga, Anam-dong, Sungbuk-ku, Seoul 136-701, KoreaEmail: [email protected]
Received 30 June 2004; Revised 2 August 2005
In this paper, we describe a secure cluster-routing protocol based on a multilayer scheme in ad hoc networks. This work providesscalable, threshold authentication scheme in ad hoc networks. We present detailed security threats against ad hoc routing proto-cols, specifically examining cluster-based routing. Our proposed protocol, called “authentication based on multilayer clusteringfor ad hoc networks” (AMCAN), designs an end-to-end authentication protocol that relies on mutual trust between nodes inother clusters. The AMCAN strategy takes advantage of a multilayer architecture that is designed for an authentication protocol ina cluster head (CH) using a new concept of control cluster head (CCH) scheme. We propose an authentication protocol that usescertificates containing an asymmetric key and a multilayer architecture so that the CCH is achieved using the threshold scheme,thereby reducing the computational overhead and successfully defeating all identified attacks. We also use a more extensive area,such as a CCH, using an identification protocol to build a highly secure, highly available authentication service, which forms thecore of our security framework.
Keywords and phrases: authentication, clustering, cluster head, ad hoc network, multilayer.
1. INTRODUCTION
Mobile ad hoc networks consist of devices that are au-tonomously self-organized into networks. In ad hoc net-works, the devices themselves are the network, and thisallows seamless communication, at low cost, with a self-organizing capability, which makes mobile ad hoc networkscompletely different from any other networking solution.
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
Mobile ad hoc networking is one of the most innovative andchallenging areas of wireless networking. Ad hoc networksare a key step in the evolution of wireless networks. An adhoc network is a collection of wireless mobile hosts forming atemporary network without the aid of any established infras-tructure or centralized administration. Securing an ad hocrouting protocol presents challenges because each user bringstheir own mobile unit to the network, without the centralizedpolicy or control of a traditional network. Many ad hoc rout-ing protocols have been proposed, and clustering-based pro-tocols include “cluster-based routing protocol” (CBRP) [1],“adaptive routing using clustered hierarchies” (ARCH) [2],

732 EURASIP Journal on Wireless Communications and Networking
the “distributed clustering algorithm” (DCA) [3], and “dis-tributed mobility-adaptive clustering” (DMAC) [3]. Mobilead hoc networks’ security issues have became a central con-cern and are increasingly important. Ad hoc networks can-not be used in practice if they are not secure, because ad hocnetworks are subject to various attacks. Wireless communi-cation links can be intercepted without noticeable effort, andcommunication protocols in all layers are vulnerable to spe-cific attacks [4]. Studies of secure cluster routing based onmultiple layers in ad hoc networks have been carried out us-ing “authenticated routing for ad hoc networks” (ARAN) [5]and in [4, 6].
In this paper, we demonstrate possible ways to exploit adhoc routing protocols, define various security environments,and offer a secure solution with “authentication based onmultilayer clustering for ad hoc networks” (AMCAN). Wedetail the ways to exploit protocols that are under consid-eration by [1, 2, 3, 4, 5, 6].
Our proposed protocol detects and protects against ma-licious actions by multilayer parties in one particular ad hocenvironment. We propose an authentication protocol thatuses certificates containing a Diffie-Hellman key agreementand a multilayer architecture so that CCH is achieved usingthe threshold scheme, so that the number of essential encryp-tions reduces the computational overhead and successfullydefeats all identified attacks.
Our evaluations show that AMCAN has minimal perfor-mance costs in terms of processing and networking overheadfor the increased security that it offers. While this basic ideahas been proposed before in [2, 3, 5], we are the first to applyit to a clustered network. Our algorithm addresses issues ofauthentication and multilayer security architecture and helpsto adapt the complexity to the scalability of mobile end sys-tems. Moreover, an extensive evaluation involves the reduc-tion of CH traffic using CCH.
In this paper, we first overview cluster routing pro-tocols in ad hoc networks, and briefly overview securitygoals, common techniques for authentication, and thresh-old cryptosystems, as well as related work for securing adhoc networks in Section 2. Section 3 describes our secu-rity concept in detail as a CCH construction algorithm andpresents authentication based on multilayer clustering forad hoc networks (AMCAN). An important contribution ofour work is the evaluation of the CCH construction andsecurity architecture in Section 4. Those measurements arebased on different authentication models, which are pre-sented in this section, and we also show the results of se-curity and network performance analyses of AMCAN. Fi-nally, Section 5 concludes the paper and considers further re-search.
2. RELATED WORK
There are numerous proposals for clustering and multilayerrouting schemes. This section presents two aspects of AM-CAN, including those that are most closely related to thecluster organization and security requirements in ad hoc net-works.
Cluster A Cluster B Cluster C
CHA CHB CHC2 4 5
1 3 6
Cluster head
Gateway node
Member node
Figure 1: Clustering-based architecture.
2.1. Clustering in ad hoc networks
A comprehensive overview of different clustering strategiesis presented in [8]. In this section, we present several of thecluster-based control structures and associated control algo-rithms that have been proposed for use in large dynamicnetworks. A cluster-based control structure promotes moreefficient use of resources in controlling large dynamic net-works. With cluster-based control, the physical network istransformed into a virtual network of interconnected nodeclusters. Each cluster has one or more controllers acting onits behalf to make control decisions for cluster members and,in some cases, to construct and distribute representations ofcluster state for use outside the cluster [2, 8].
CBRP [1] is a routing protocol designed for use in mo-bile ad hoc networks. The protocol divides the nodes of thead hoc network into a number of overlapping or disjointtwo-hop-diameter clusters using a distributed method. Thecluster-based architecture was devised to minimize the flood-ing of route discovery packets. This kind of architecture ismost suitable for large networks with several nodes. Theentire network is divided into a number of overlapping ordisjoint two-hop-diameter clusters, as shown in Figure 1. Acluster head (CH) is elected for each cluster to maintain clus-ter membership information. A cluster is identified by its CHID. Intercluster routes are discovered dynamically using thecluster membership information kept by each CH. By clus-tering nodes into groups, the protocol efficiently minimizesthe flooding traffic during route discovery and speeds up thisprocess. A node regards itself as being in a cluster if it hasa bidirectional link to the head of the cluster. In the currentimplementation of CBRP, the node with the lowest node IDis elected as the CH.
All of the nodes broadcast a HELLO message periodically.The HELLO message also contains tables carrying infor-mation about the neighboring nodes and adjacent clusters.These HELLO messages are useful for maintaining up-to-date two-hop topology. An in-depth study of cluster-basednetworks has been published [1].
ARCH builds on the foundations of adaptive routing us-ing clusters (ARC) [2] to create a multilevel hierarchy that is

Authentication Based on Multilayer Clustering 733
able to adjust its depth dynamically in response to the chang-ing conditions of the network. ARCH conforms to the max-imum hierarchical depths proven to be the theoretical opti-mum. As such, the protocol lends itself well to hierarchicaladdressing structures. When used with hierarchical address-ing, it should be extremely beneficial for reducing routingtable size.
2.2. Security protocol in ad hoc networks
The security requirement, which typically strives for ad hocnetworks security goals like authentication, availability, con-fidentiality, integrity, and the nonrepudiation of communi-cating entities, is of particular importance as it forms thebasis for achieving the other security goals. Encryption ofad hoc networks security is worthless if the communica-tion partners have not verified their identities beforehand.Authentication of entities and messages is realized in dif-ferent ways using either symmetric or asymmetric crypto-graphic algorithms. Authentication enables a node to ensurethe identity of the peer node that it is in communicationwith. Without this, an attacker could impersonate a node,thereby gaining unauthorized access to a resource and sensi-tive information and interfering with the operation of othernodes.
While a symmetric algorithm depends on the existenceof a preshared key, authentication using asymmetric cryp-tography requires a secure mapping of public key infrastruc-tures (PKI). PKIs use digitally signed certificates to verify akey owner’s identity. Each user has to prove their identity toa certification authority (CA) and in turn receives a digitallysigned certificate proving the ownership of the public key.Distributing the signing key and the functionality of a CAover a number of different nodes by means of secret shar-ing and threshold cryptography is a possible solution to thisproblem, as we will study here [4].
Threshold cryptosystem
A threshold cryptosystem is a distributed implementationof a cryptosystem, in which the secret key is a secret that isshared among a group of nodes. These nodes can then de-crypt or sign messages by following a distributed protocol.The goal of a threshold scheme is to protect the secret key ina fault-tolerant way. Namely, the key remains secret, and cor-rect decryptions or signatures are always computed, even ifthe adversary corrupts less than a fixed threshold of the node.Desmedt and Frankel introduced threshold cryptosystems[13]. In particular, they presented a threshold cryptosystembased on the Diffie-Hellman problem. The secret sharingscheme [14] is important for threshold cryptosystems. Theidea of secret sharing is to start with a secret, and divide itinto pieces called shares, which are distributed amongst userssuch that the pooled shares of specific subsets of users al-low reconstruction of the original secret. We now describethe Shamir (t · n)-threshold secret sharing scheme. Supposep and q are large primes such that q divides p − 1, and gis an element of order 1 in Z. It is assumed that p, q, andg are known publicly. Unless otherwise stated, all arithmetic
Table 1: Variables and notation used in ARAN.
KA+: public key of node A.
KA−: private key of node A.
dKA+: encryption of data d with key KA+.
certA: certificate belonging to node A.
t: timestamp.
e: certificate expiration time.
NA: nonce issued by node A.
IPA: IP address of node A.
RDP: route discovery packet identifier.
REP: REPly packet identifier.
SPC: shortest path confirmation packet identifier.
RSP: recorded shortest path packet identifier.
ERR: ERRor packet identifier.
will be computed modulo p. The scheme is described in thefollowing protocol. Distribution of trust in our key manage-ment service is accomplished using threshold cryptography[16, 17]. An (n, t + 1)-threshold cryptography scheme allowsn parties to share the ability to perform a cryptographic op-eration so that any t + 1 parties can perform this operationjointly, whereas it is infeasible for at most t parties to do so,even by collusion.
ARAN protocol
The ARAN protocol can detect and protect against mali-cious actions by third parties and in the ad hoc environment.ARAN is composed of two distinct stages. The first stage issimple and requires little extra work from peers beyond tra-ditional ad hoc protocols. Nodes that perform the optionalsecond stage increase the security of their route, but incuran additional cost for their ad hoc peers who may not com-ply. ARAN makes use of cryptographic certificates for thepurposes of authentication and nonrepudiation. It consistsof a preliminary certification process, a mandatory end-to-end authentication stage, and an optional second stage thatprovides secure shortest paths. The optional stage is consid-erably more expensive than providing end-to-end authenti-cation. There are twelve steps necessary to implement ARAN[5].
In [5], vulnerabilities and attacks specific to AODV andDSR protocols are discussed and the two protocols are com-pared with the ARAN protocol. The ARAN protocol uses apreliminary cryptographic certification process, followed byan end-to-end route authentication process, which ensuressecure route establishment. The protocol does not specify anyspecific key distribution algorithm. On joining the network,each node receives a certificate from the trusted server.
In this partition, we briefly review ARAN protocol. Wefirst describe the notations used throughout this paper inTable 1.
There are totally twelve steps to implement ARAN:
(1) T→ A: certA = [IPA,KA+, t, e]KT−,(2) A → broadcast:[RDP, IPX, certA,NA, t]KA−,

734 EURASIP Journal on Wireless Communications and Networking
T
A B C D X
Cert
RDP RDP RDP RDP
REP REP REP REP
T: Trust server
Nodes: A, B, C, D, X
RDP: Route discovery packet identifier
REP: Reply packet identifier
Figure 2: ARAN simple ad hoc network model.
(3) B→ broadcast:[[RDP, IPX, certA,NA, t]KA−]KB−, certB,
(4) C→ broadcast: [[RDP, IPX, certA,NA, t]KA−]KC−, certC,(5) X→ D: [REP, IPA, certX,NA, t]KX−,(6) D→ C: [[REP, IPA, certX,NA, t]KX−]KD−, certC,(7) C→ B: [[REP, IPA, certX,NA, t]KX−]KC−, certC,(8) A→ broadcast: SPC, IPX, certX,
[IPX, certA,NA, t]KA−KX+,(9) B→ broadcast: IPX, certX, SPC, IPX, certX,
[[IPX, certA,NA, t]KA−KX+]KB−, certBKX+,(10) X→ D: [RSP, IPA, certX,NA, route]KX−,(11) B→ C: [ERR, IPA, IPX, certC,NB, t]KB−,(12) T→ broadcast: [revoke, certr]KT−.
Figure 2 shows totally how to process ARAN situation.The idea to use a distributed certification authority based ona shared certification key and threshold cryptography for se-curing ad hoc networks was presented by [15]. Our approachis based on modification idea of ARAN protocol used by[5, 15], but introduces several new concepts, like a cluster-based network architecture, a process for admitting new par-ticipants, and end-to-end access control within the multi-layer in the ad hoc networks. The ARAN protocol cannot bea configuration for a large area. If ARAN is large area, ARANhas a lot of overhead.
In this paper, we show how our proposed AMCAN re-duces the computational overhead and successfully defeatsall identified attacks in a large area.
3. AUTHENTICATION BASED ON MULTILAYERCLUSTERING FOR AD HOC NETWORKS
3.1. Scenario for an experiment in AMCAN
Our proposed scheme is based on the following assump-tions. First, mobile nodes in an ad hoc network usually com-municate with one another via an error-prone, bandwidth-constrained, insecure wireless channel. The physical layerof the network is vulnerable to denial-of-service (DoS) at-tacks. As there is no way to protect from DoS attacks, we donot consider physical attacks. Second, the CH knows whichnodes are in its own cluster. Therefore, the CH manages the
IDs of cluster members (i.e., when the CH receives a commu-nication request, it can identify members of its own cluster).Third, we consider CH a trusted member. The CH is similarto the server in [15]. Actually, one can trust the section areaCH, even if a member node is abnormal. Therefore, we usedthe CCH (control cluster head) key in a network. Finally, theCCH selected always trusts CH.
The AMCAN protocol requires the use of a trusted cer-tificate server T (CCH) in a cluster. A CH is a certificateserver T for authenticated nodes in a cluster. A CCH authen-ticates the CH for the CCH private key. A CCH is a root-layercertificate trust server. CH certification uses communicationbetween the nodes in a cluster. All the nodes of a networkknow the public key for the system. Suppose that we have apair of public and private keys. The CCH and CH use thecertificates to keep the Diffie-Hellman key [17] agreement.Our proposed scheme should minimize the communicationload in order to extend the overall lifetime of the system. TheCH knows who is in its own cluster. We use the key when ex-changing certificates to enable secure communication. Fig-ures 3 and 4 illustrate how the service is configured. More-over, we propose applying the use of ID-based [18, 19] cryp-tography to abate the overhead effect on exchanging the pub-lic key. ID-based public key exchange is weighted more thanthe RSA algorithm. An ID-based public key is suitable in amobile ad hoc network.
3.2. Configuration of a multilayer cluster
In this section, we describe an efficient authentication algo-rithm for the set up and maintenance of cluster organiza-tion in the presence of node mobility that modify, thus sat-isfying the DMAC and the ARCH for the ad hoc clusteringrouting protocol. We make two main modifications to theoriginal DMAC and ARCH algorithms as shown in Figures 3and 4. We use the concept of low-maintenance clustering andmobility-aware clustering schemes. Low-maintenance clus-tering schemes aim at providing stable cluster architecturefor upper-layer protocols with little cluster maintenance cost.By limiting reclustering situations or minimizing explicitcontrol messages for clustering, the cluster structure can bemaintained well without excessive consumption of networkresources for cluster maintenance. Mobility-aware clusteringtakes the mobility behavior of mobile nodes into considera-tion. This is because the mobile node’s movement is the maincause of changes to the network topology. By grouping mo-bile nodes with similar speed into the same cluster, the intra-cluster links can be greatly tightened and the cluster structurecan be correspondingly stabilized in the face of moving mo-bile nodes. The cluster topology is initialized and maintainedthrough the periodic transmission of HELLO messages byeach node. This makes this algorithm suitable for both clus-tering set up and maintenance authentication from the CH,which was not available in authentication solutions.
3.2.1. CH selection algorithm
The selection of the CH uses the DMAC algorithm in [3].The DMAC in our clustering algorithm includes only two

Authentication Based on Multilayer Clustering 735
3
2
1
CHA
Cluster head
Member node
(a)
3
2
1
CHA
CHB
3
2
1
Cluster A Cluster B
Cluster A Cluster B
CHB
CHA CHB
B5
5
4
Cluster head
Gateway node
Member node
(b)
Figure 3: The CH selected when joining a CH between cluster A and cluster B (parameter priority lowest ID: A > B in cluster, 1 > 2 > 3 >4 > 5 in nodes) (a) Normal cluster. (b) Cluster A moves CHB into cluster B.
conditions to change the CH. Figure 3 shows the DMAC statein the two conditions. One is when two CHs come within therange of each other, another is when a node becomes discon-nected from any other cluster. This is an improvement overexisting algorithms, which select the CH every time the clus-ter membership changes. The DMAC algorithm assumes thata message sent by a node is received correctly within a finitetime by all its neighbors. The DMAC also assumes that eachnode knows its own ID, weight, and role of all its neighbors.In addition, each node knows its power of nodes.
Here, we use the same two types of messages used in theDCA (namely, Ch(v) and Join(v,u)) [3]. In the following weuse Cluster(v) and ClusterHead to indicate the set of nodesin the cluster whose ClusterHead is v and the ClusterHeadof a node’s cluster, respectively. v’s Boolean variable Ch(v)is set to true if v has sent a Ch message. Its variables Cluster-Head, Ch(·), and Cluster(·) are initialized to nil, false, and φ,respectively. The following is the description of the two M-procedures as executed at each node v. In DCA algorithm, onreceiving a Ch message from a neighbor u, node v checks ifit has received from all its neighbors z, such that wz > wu, aJoin(z, x) message. In this case, v will not receive a Ch mes-sage from these z, and u is the node with the biggest weightin v’s neighborhood that has sent a Ch message.
At the clustering set up, or when a node v is added tothe network, it executes the CH selection procedure (seeAlgorithm 1) in order to determine its own role. If its neigh-bors include at least one CH with a greater weight, then v willjoin it. Otherwise it will be a CH [3].
Initializebegin
if z∈(v) : wz>wv ∧ Ch(z) = φthen begin
x := maxwz>wvz : Ch(z);send Join(v, x);ClusterHead: = x
endelse begin
send Ch(v)Ch(v) := true;ClusterHead: = v;Cluster(v) := vend
end;Repeat—On receiving ClusterHead(u)
beginif (wu > wClusterHead) then beginsend Join(v,u);ClusterHead: = u;if Ch(v) then Ch(v) := falseend
end;
Algorithm 1: CH selection procedure.
At the clustering set up, or when a node v is added tothe network, it executes the procedure Initialize in order todetermine its own role. If among its neighbors there is at leasta cluster head with bigger weight, then v will join it. Notice

736 EURASIP Journal on Wireless Communications and Networking
CHB
CHA CHB CHC
1 CHA 2 CHB 3 4 CHC 5
CCH node
CH node
Gateway node
Member node
Cluster A Cluster B Cluster C
Layer1
Layer2
Layer3
Figure 4: CCH selection process with multiple layers (parameterpriority lowest ID : B > A> C in cluster, 1 > 2 > 3 > 4 > 5 in nodes).
that a neighbor with a bigger weight that has not decided itsrole yet will eventually send a message. If this message is aCh message, then v will affiliate with the new cluster head.When a neighbor u becomes a cluster head, on receiving thecorresponding Ch message, node v checks if it has to affiliatewith u, and it checks whether wn is bigger than the weightof v’s cluster head or not. In this case, independently of itscurrent role, v joins u’s cluster [3].
3.2.2. CCH selection algorithm
In this section, our proposed scheme describes the CCHfor managing a CH. The CCH selection scheme uses theARCH algorithm. The CCH has information on all the CHsand takes charge of certificates between CHs. AMCAN usesthe ARAN protocol based on the CCH selection algorithm.Figure 4 shows the authenticated architecture for multiplelayers using the ARCH algorithm. Source node 1 in clusterA communicates with destination node 5 in cluster C. Beforedesigning the details of our algorithm, we noted that the CHselected the self-stabilizing leader.
On receiving the message Join(u, z), the behavior of nodev depends on whether it is a cluster head or not. In the affir-mative, v has to check if either u is joining its cluster (z = v:in this case, u is added to Cluster(v)) or if u belonged to itscluster and is now joining another cluster (z = v: in this case,u is removed from Cluster(v)). If v is not a cluster head, it hasto check if u was its cluster head. Only if this is the case, v hasto decide its role: it will join the biggest cluster head x in itsneighborhood such that wx > wv if such a node exists. Other-wise, it will be a CCH (ControlClusterHead). The CCH is v.The CCH roles need slow mobility, lowest of ID, and enoughof energy in CHs. u parameter contents included mobility,ID, and energy (see Algorithm 2).
3.3. Design of AMCAN
3.3.1. Protocol scheme
In this section, we describe the detailed operation of AM-CAN. AMCAN consists of a preliminary certification process
beginif Ch(v)then if z = v
then Cluster(v) := Cluster(v)∪ uelse if u ∈ Cluster(v)then Cluster(v) := Cluster(v)\u
else if ControlClusterHead = u thenif z ∈ (v) : wz > wv ∧ Ch(z) = φ
then beginx := maxwz>wvz : Ch(z);send Join(v, x);ControlClusterHead: = x
endelse begin
send Ch(v)Ch(v) := true;ControlClusterHead: = v;Cluster(v) := vend
end
Algorithm 2: CCH selection procedure.
and three mandatory stages: CCH authentication for CHs,a node joins a cluster for the first time, and authenticationfor end-to-end of session key exchange. So far, we have sur-veyed several existing solutions for CCH key establishmentbased on the Diffie-Hellman key exchange. These involvesharing the CCH key communication securely with all mem-bers. However, as all members share the same secret key, theycannot communicate with another member using the end-to-end method. Moreover, if anyone has their key stolen, allthe members must reestablish the CCH key. The core of thematter is sharing the same secret key with all members. It isimpossible for all members to share one secret key becauseall nodes cannot trust each other in an ad hoc network.
For this reason, we classify all members into two types oftrust level: trusted members and untrusted members. Onlythe CH for trusted members in a cluster can establish a CCHkey. Untrusted members authenticate and communicate withother untrusted members using a session key, which is gen-erated by certificate exchange through an authenticated path.AMCAN achieves end-to-end security services and executespartial authentication in all clusters.
3.3.2. System model
There are three different scenarios in which authenticationneeds to be performed. These are when the CCH authenti-cates the CH, when a node joins a network for the first time,and when a node from a cluster wishes to communicate forend-to-end key exchange. All the CHs have their own pairof public/private keys and a CCH partition for the stable se-curity of the network. Nodes communicate using a commoncluster key within the same cluster. Suppose that all nodesknow the public key for the system, and that they have theirown public/private key pair. Outside reply attack on a mes-sage can be prevented by sending an encrypted timestampwith the message.

Authentication Based on Multilayer Clustering 737
Table 2: Variables and notation used in AMACN.
CCH: trust server of control CH
CHA: cluster head in cluster A
IDX : identity of X
KS,CH: secret key shared with S and CH
Time1: current time
S: member node in CHA
X: member node in CHB
As large area networks are adaptive to a hierarchical ar-chitecture, cluster-based networks are used. A large commu-nication area is divided into several section areas (clusters).Each section CH can participate in only one section andmanages the communication units (cluster member nodes)within its section area. Each unit shares a secret key with thesection CH when entering a section area. If any unit (S) wantsto communicate with another unit (X) in another sectionarea, S needs to know whether X wants to communicate withunit S. If so, they will also want to communicate mutually us-ing a secure end-to-end method. Therefore, they exchange acertificate with each other through an authenticated path, sothat they can authenticate each other and establish a sessionkey for secure end-to-end communication. Figures 4, 6, and7 illustrate how the service is configured.
3.3.3. Notation
We use the notation listed in Table 2 to describe the proposedscheme.
3.3.4. CCH authenticated for CH usingthreshold cryptosystem
In our case, the n CHs of the key management service sharethe ability to sign certificates. For the service to tolerate tcompromised CHs, we use an (n, t + 1)-threshold cryptogra-phy scheme and divide the private key, k, of the service inton shares (CHA, CHB, CHC), assigning one share to each CH.We call (CHA, CHB, CHC) sharing of K . Figure 5 illustrateshow the service is configured.
Given a service consisting of three CHs, let K/k be thepublic/private key pair of the service. Using a (3,2)-thresholdcryptography scheme, each CHi gets a share si of the privatekey k.
For a message m, CHi can generate partial signaturesPS(m, si) using its share si. The correct CHA and CHC bothgenerate partial signatures and forward the signatures to acombiner, c. Although CHB fails to submit a partial signa-ture, c can generate the signature (m)k of m signed by CHusing the private k.
AMCAN consists of a preliminary certification process, amandatory end-to-end authentication step, and an optionalsecond step that provides threshold cryptosystem. Optionstep of the AMACN reduced more overhead than end-to-end authentication of ARAN.
CCH requires the use of a trusted certificate server T [5].All CHs receive a certificate from CCH in Figure 6. A CH
CHA
CHB
CHC
Cluster A
Cluster B
Cluster C
PS(m, CHA)
c
PS(m, CHC)
(m)km
Figure 5: Threshold signature.
(3)
(6)
(2) (5)(1) (4)
Cluster A Cluster C
Cluster B
CHB
CCHLayer 3
Layer 2
Layer 1
CHA CHC
S X
Figure 6: Authentication process for multiple layers within a largecluster network.
certificate has the following form:
CCH −→ CHA : certCHA =[
IDCHA
∥∥KCCH +
∥∥e‖Time1
]. (1)
The certificate contains the ID address of the CH, thepublic key of the CCH, timestamp Time1 for when the certifi-cate was created, and time e at which the certificate expires.These variables are concatenated and signed by the CCH.Every CH must maintain fresh certificates with the trustedserver and must know the CCH public key. CHA sends arequest message with a timestamp to CCH for a public keyrequest to communicate with CHB. If sending an encryptedmessage, CCH uses a private key that CHA decrypts using theCCH public key.
3.3.5. A node joins a cluster for the first time
The ID address of the IDCH, node S’s certificate (certS), anonce NCH, and the current time t are all signed with A’s pri-vate key. Each time S performs route discovery, it increasesthe nonce monotonically. Nodes then store the nonce theylast saw with its timestamp. In Figure 8, the node S appearedas nodes 2 and 3:
CH −→ S : certS =[[
IDCH∥∥KCH +
∥∥e‖Time1
],NCH
]. (2)

738 EURASIP Journal on Wireless Communications and Networking
CHA CCH
CHC
Request[
IDCHA
∥∥ IDCHC
∥∥Time1
∥∥NCHA
]
EKCCH−[KCHC+‖Request ‖e]
IDCHA
∥∥ IDCHC
∥∥NCHA
∥∥ IDS
∥∥ IDS
∥∥ certS
∥∥NCHA
∥∥
h(
IDCHA
∥∥ IDCHC
∥∥NCHA |NS
∥∥ IDS
)KCHC+
Request[
IDCHC
∥∥ IDCHA
∥∥Time2
∥∥NCHC
]
EKCCH−[KCHA+ ‖Request‖e]
Figure 7: CHs authenticated from CCH.
1 CHA
2
2
Cluster A
(a)
3 3
2CHA CHB
1 4
Cluster C Cluster B
(b)
Figure 8: A node joins a cluster for the first time. (a) New node 2joins cluster A for the first time. (b) Node 3 joins cluster A fromcluster B.
The CH generates a random number NCH and sends itto entry node A with its own cluster key. Source node A es-tablishes a path message as a multicast to its own CH. En-try node A stores a cluster key for communication within thecluster. The public key for the encryption of random numberNCH is sent to CH.
3.3.6. Authentication for end-to-end of key exchange
So far, we have considered security services for communi-cation from one cluster member to a cluster head. In anad hoc network environment, securing the end-to-end pathfrom one mobile user to another is the primary concern.The end-to-end security service minimizes the interferencefrom intermediate nodes, especially malicious nodes. In this
subsection, we present secure end-to-end authentication anda key exchange protocol between one cluster member andanother. The end-to-end key exchange progress is describedin Figure 9. The end-to-end key exchange uses the Diffie-Hellman key as the public key.
Figure 6 shows the authentication process for multiplelayers in large ad hoc networks. The CCH authenticates CHs.There are 7 steps required to implement AMCAN. Figure 9shows the end-to-end authentication between CHs commu-nicating after authentication using the CCH.
First, using a previously shared secret key KS,CHA , S sendsa message to CHA requesting communication with X. SinceIDS is encrypted using KS,CHA , other nodes except S and CHA
do not know the node with which S wishes to communicate.As certS and NS are also encrypted, they can be transferredsecurely.
Upon receiving the request, CHA checks that S is a mem-ber. If so, this equals the progress leaving out steps (2) and(6) (i.e., CHA = CHC). Otherwise, CHA asks the other clus-ter heads where X is using the CHC public key, which waspreviously established in step (3) between cluster heads. LetX be a member of CHB.
In step (3), X is informed of the request from S to com-municate with him. CHC sends S’s certificate along withNCHC . Upon deriving the public key for S from the certificate,X calculates the session key KX,S = (PKS)kX mod p, which willbe shared between S and X. X uses KS,X in step (4) to let CHC
know that it accepts S’s request for communication. CHC andCHA pass to S the part of the message in step (4) that containsX’s confirmation using KS,X. CHC and CHA also forward X’scertificate to S. Upon receiving a message including X’s cer-tificate, S can calculate the session key KS,X = (PKX)kS mod pusing PKX derived from certX.
Finally, S and X share the same secret key, and S com-municates with X by sending back X’s nonce encrypted us-ing the shared key KS,X. We propose a reliable algorithm thatruns strong authentication for each packet. This time, CCHperforms authentication for all CHs, and CH authenticatesthe certification authority (CA) for all nodes in a cluster. The

Authentication Based on Multilayer Clustering 739
Cluster A Cluster C
(2) Search X (include certS)
(1) Requestcommunication
with X (include certS)
(6) Forward response(include certX)
(7) Forward response(include certX)
(5) Response(include certX)
(3) Inform the requestfrom S (include certS)
CHA CHC
S X(9) Confirmation & communication
(8) Calculatesession key KS,X
(4) Calculatesession key KS,X
Figure 9: End-to-end authentication between clusters after the CHs are authenticated from the CCH.
CH key is used to exchange the session key secretly. There-fore, all the messages described above can be forwarded forreference by appending them to routing packets when a routeis discovered.
4. EVALUATION AND PERFORMANCE ANALYSIS
4.1. Experiment of energy and mobilitybecoming a CCH
We used tools within Matlab to simulate the algorithm de-scribed in Section 3.2 for networks with varying node den-sity (λ) and different values of the parameters p and k. Eachnode in the network chooses to become a CH with probabil-ity p and advertises itself as a CH to the nodes within its radiorange. This advertisement is forwarded to all the nodes thatare no more than k hops away from the CH. Any node thatreceives such advertisements and is not itself a CH joins thecluster of the closest CH. Any node that is neither a CH norhas joined any cluster itself becomes a CH. Because we havelimited the advertisement forwarding to k hops, if a nodedoes not receive a CH advertisement within time durationt (where t units is the time required for data from the CH toreach any node k hops away) it can infer that it is not withink hops of any volunteer CH and hence become a forced CH.Moreover, this limit on the number of hops allows the CHto schedule periodic transmissions to the processing center.To generate the network for each simulation experiment, thelocation of each node is found by generation of two ran-dom numbers uniformly distributed in [0, 2a], where 2a isthe length of a side of the square area in which the nodes aredistributed. In all of these experiments, the communicationrange of each node was assumed to be 1 unit. To verify thatthe optimal values of the parameters p and k of our algo-rithm computed according to [20] formulae (11) and (13)do minimize the energy spent in the system, we simulatedour clustering algorithm on node networks with 50, 100, and
200 nodes distributed uniformly in a square area of 10 squareunits. We have, without loss of generality, assumed that thecost of transmitting 1 unit of data is 1 unit of energy. Theprocessing center is assumed to be located at the center ofthe square area. For the first set of simulation experiments,we considered a range of values for the probability p of be-coming a CH in the algorithm proposed in Section 3.2. Foreach of these probability values, we computed the maximumnumber of hops k allowed in a cluster using (13) and usedthese values for the maximum number of hops allowed ina cluster in the simulations. We simulated in a cluster in thesimulations. We simulated the clustering algorithm 100 timesfor each density and each of the probability values and usedthe average energy consumption over the 100 experiments toplot the graph in Figures 10 and 11.
4.2. Compare ARAN and AMCAN
In this section, we compare the efficiency properties of theexisting CCH key establishment protocol and our proposedscheme. We also compare end-to-end security and move dis-tance within a cluster. Table 3 presents the total message andthe total number of move distance operations necessary foreach protocol. The efficiency numbers for existing solutionsare given in tables for each protocol. None of the existing so-lutions achieve end-to-end security. In AMCAN, variable cis the number of CHs. We assume that CCH establishmentamong CHs uses ARCH, CBRP, and DMAC. As AMCANalso establishes authentication based on a trust layer, it alsoachieves end-to-end security.
We evaluated the performance of our protocol and iden-tified the advantages and limitations of the proposed ap-proach. In this paper, our proposed AMCAN protocol is usedin an ad hoc network environment. The certificate mecha-nism uses the certification method from the ARAN identifi-cation protocol within a cluster. The CH establishes a mem-ber node that is worthy of trust by the members of a CH.

740 EURASIP Journal on Wireless Communications and Networking
100
80
60
40
20
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
N = 200N = 100N = 50
Probability of becoming a CCH
En
ergy
(%)
Figure 10: Total energy in a network of n nodes distributed in anarea of 10 square units for different values of probability of becom-ing a CCH in the algorithm in Section 3.2.
100
80
60
40
20
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
N = 200N = 100N = 50
Probability of becoming a CCH
Mob
ility
(%)
Figure 11: Mobility in a network of n nodes distributed in an areaof 10 square units for different values of probability of becoming aCCH in the algorithm in Section 3.2.
Falsehood certification in the certification process can beachieved. AMCAN is a little more stable for certification ofCH using CCH and has fewer processing operations. TheARAN protocol distinguishes the nodes of a local distancearea as a cluster. Table 4 presents AMCAN superior for largenetworks as it was designed for use in such networks. TheAMCAN protocol has strong security as it uses the CCH toobtain a higher level of security than that of ARAN.
The advantages and limitations of the proposed approachhave been identified. The certificate mechanism uses the
certification method of the ARAN identification protocolwithin a cluster. AMCAN minimizes the process of chang-ing certificates by using clustering-routing protocols. Ananalysis of its stability verified its authentication, efficiency,safety, and scalability. Authentication and nonrepudiationuse a cryptographic certificate. Each node receives a certifi-cate from the CH.
We evaluated three performance metrics.
(i) Unauthorized participation: AMCAN participationaccepts only packets that have been signed with a cer-tified key issued by a trusted authority. There are manymechanisms for authenticating users to a trusted cer-tificate authority. The trusted authority is also a singlepoint of failure attack.
(ii) Spoofed route signaling: since only the source nodecan sign using its own private key, nodes cannot spoofother nodes in route instantiation. Similarly, replypackets include the destination node’s certificate andsignature, ensuring that only the destination can re-spond to route discovery.
(iii) Reply attacks: reply attacks are prevented by includinga nonce and a timestamp with the routing message.
AMCAN minimizes changes in the certificate process of clus-ter networks. The analysis of scalability verified the authenti-cation, efficiency, safety, and scalability of the method.
Protocol analysisWe need to show that the above protocol is an AMCAN.
Lemma 1. The protocol described in Section 3 is designed forAMCAN.
Proof. The protocol can be performed as follows: receiverCHC authenticates IDS ‖ IDCHA ‖ certS ‖NS for interclus-ter. Sender CHA sends CCH including IDCHA ‖ IDCHC
‖Time1‖NCHA . AMCAN further improves the stability by theuse of a nonce. AMCAN can reduce system energy use by di-viding the parts to be handled in each CH. The CCH offerssafe authentication of each node through management of theCHs.
Computation costs
The computation costs are calculated as
KS,X = (PKX)kS mod p, (3)
and our protocol uses an encryption/decryption protocolthat requires a total of 1 operation of KS,X = (PKX)kS mod p,which can be computed efficiently using the standard AM-CAN. The CCH is achieved using the threshold scheme,thereby reducing the computation overhead because theARAN protocol step has 12 steps but the AMCAN protocolstep has 7 steps.
5. CONCLUSION
In this paper, we examined possible methods for useagainst ad hoc routing protocols, defined various security

Authentication Based on Multilayer Clustering 741
Table 3: Performance evaluation on each protocol.
ItemProtocol
ARAN AMCAN
Encryption algorithm RSA digital signature Diffie-Hellman
Total number of session keys n 2
Total number of message n (n: node number) n/c (c: cluster number)
End-to-end security of area X (small area) O (small and large area)
Move distance More 2 hops 2 hops
X : no (impossible), O: yes (possible).
Table 4: Characteristics on each protocol.
ItemProtocol
ARAN AMCAN
Authentication O O
Efficiency O O
Safety O O
Scalability X O
X : no (impossible), O: yes (possible).
environments, and offered a secure solution with authentica-tion based on multilayer clustering for ad hoc networks (AM-CAN). We showed ways to exploit two protocols that are un-der consideration for clustering-based routing protocols andthe ARAN identification protocol. Clustering-based proto-cols are efficient in terms of network performance. Our pro-posed protocol, called AMCAN, detects and protects againstmalicious actions across multiple layers and by peers in oneparticular ad hoc environment. AMCAN introduces authen-tication, efficiency, safety, and scalability to an ad hoc envi-ronment as part of a minimal security policy. Our evalua-tion showed that AMCAN has minimal performance costsin terms of processing and networking overhead for the in-creased security that it offers. In this paper, we examined thecertification process for clustering routing protocols in adhoc networks, and designed a certification protocol for AM-CAN. The basic idea of AMCAN is to propose a CCH thathas top-layer authority. We propose an authentication pro-tocol that uses certificates containing an asymmetric key anda multilayer architecture so that the CCH is achieved usingthe threshold scheme, thereby reducing the computationaloverhead and successfully defeating all identified attacks. Wealso use a more extensive area, such as a CCH, using an iden-tification protocol to build a highly secure, highly availableauthentication service, which forms the core of our securityframework.
ACKNOWLEDGMENT
This work was done under a University Fundamental Re-search Program supported by Ministry of Information &Communication in Republic of Korea.
REFERENCES
[1] M. Jiang, J. Li, and Y. C. Tay, “Cluster based routing pro-tocol (CBRP) functional specification,” IETF internet draft,MANET working group, August 1999, http://www.comp.nus.edu.sg/∼tayyc/cbrp/draft-ietf-manet-cbrp-spec-01.txt.
[2] E. M. Belding-Royer, “Multi-level hierarchies for scalable AdHoc routing,” Wireless Networks, vol. 9, no. 5, pp. 461–478,2003.
[3] S. Basagni, “Distributed clustering for Ad Hoc networks,” inProc. International Symposium on Parallel Architectures, Algo-rithms, and Networks (ISPAN ’99), pp. 310–315, Fremantle,Australia, June 1999.
[4] M. Bechler, H.-J. Hof, D. Kraft, F. Rahlke, and L. Wolf, “Acluster-based security architecture for Ad Hoc networks,” inProc. 23rd Annual Joint Conference of the IEEE Computer andCommunications Societies (INFOCOM ’04), vol. 4, pp. 2393–2403, Hong Kong, March 2004.
[5] K. Sanzgiri, B. Dahill, B. N. Levine, C. Shields, and E. M.Belding-Royer, “A secure routing protocol for Ad Hoc net-works,” in Proc. 10th IEEE International Conference on Net-work Protocols (ICNP ’02), pp. 78–87, Paris, France, Novem-ber 2002.
[6] A. C.-F. Chan, “Distributed symmetric key management formobile Ad Hoc networks,” in Proc. 23rd Annual Joint Confer-ence of the IEEE Computer and Communications Societies (IN-FOCOM ’04), vol. 4, pp. 2414–2424, Hong Kong, March 2004.
[7] L. Zhou and Z. J. Haas, “Securing Ad Hoc networks,” IEEENetwork, vol. 13, no. 6, pp. 24–30, 1999.
[8] M. Steenstrup, “Cluster-based networks,” in Ad Hoc Network-ing, C. E. Perkins, Ed., chapter 4, pp. 75–138, Addison-Wesley,Reading, Mass, USA, 2000.
[9] L. Venkatraman and D. P. Agrawal, “A novel authenticationscheme for Ad Hoc networks,” in Proc. IEEE Wireless Commu-nications and Networking Conference (WCNC ’00), vol. 3, pp.1268–1273, Chicago, Ill, USA, September 2000.
[10] L. Kleinrock and F. Kamoun, “Hierarchical routing for largenetworks: performance evaluation and optimization,” Com-puter Networks, vol. 1, no. 3, pp. 155–174, 1977.
[11] J. Sucec and I. Marsic, “Clustering overhead for hierarchicalrouting in mobile Ad Hoc networks,” in Proc. 21st AnnualJoint Conference of the IEEE Computer and CommunicationsSocieties (INFOCOM ’02), vol. 3, pp. 1698–1706, New York,NY, USA, June 2002.
[12] L. Buttyan and J.-P. Hubaux, “Report on a working sessionon security in wireless Ad Hoc networks,” ACM SIGMOBILEMobile Computing and Communications Review, vol. 7, no. 1,pp. 74–94, 2003.
[13] Y. G. Desmedt, “Threshold cryptography,” European Trans-actions on Telecommunications, vol. 5, no. 4, pp. 449–457,1994.

742 EURASIP Journal on Wireless Communications and Networking
[14] A. Shamir, “How to share a secret,” Communications of theACM, vol. 22, no. 11, pp. 612–613, 1979.
[15] L. Zhou and Z. J. Hass, “Securing Ad Hoc network,” IEEE Net-work, vol. 13, no. 6, pp. 24–30, 1999.
[16] Y. G. Desmedt and Y. Frankel, “Threshold cryptosystems,” inProc. 9th Annual International Cryptology Conference on Ad-vances in Cryptology (CRYPTO ’89), G. Brassard, Ed., vol. 435of Lecture Notes in Computer Science, pp. 307–315, Springer,Santa Barbara, Calif, USA, August 1990.
[17] M. Steiner, G. Tsudik, and M. Waidner, “Diffie-Hellman keydistribution extended to group communication,” in Proc. 3rdACM Conference on Computer and Communications Security(CCS ’96), pp. 31–37, New Delhi, India, March 1996.
[18] A. Shamir, “Identity-based cryptosystems and signatureschemes,” in Proc. International Cryptology Conference on Ad-vances in Cryptology (CRYPTO ’84), vol. 196 of Lecture Notesin Computer Science, pp. 47–53, Springer, Santa Barbara, Calif,USA, August 1985.
[19] D. Boneh and M. K. Franklin, “Identity-based encryptionfrom the Weil pairing,” in Proc. 21st Annual InternationalCryptology Conference on Advances in Cryptology (CRYPTO’01), vol. 2139 of Lecture Notes in Computer Science, pp. 213–229, Springer, Santa Barbara, Calif, USA, August 2001.
[20] S. Bandyopadhyay and E. J. Coyle, “Minimizing communica-tion costs in hierarchically-clustered networks of wireless sen-sors,” Computer Networks, vol. 44, no. 1, pp. 1–16, 2004.
Keun-Ho Lee received the B.S. degreein computer science from SoonChun-Hyang University, Korea, in 1998, andthe M.S. degree in electronic commercefrom SoonChunHyang University, Korea, in2001. He is currently a Ph.D. candidate incomputer science and engineering at KoreaUniversity, Korea. He is also a researcher inthe Research Institute of Computer Infor-mation and Communication at Korea Uni-versity. His research interests include ad hoc, sensor, ubiquitous,and mobile communication security.
Sang-Bum Han received the B.S. degree incomputer science from Seoul National Uni-versity of Technology, Korea, in 1997, andthe M.S. degree in computer engineeringfrom Korea University, Korea, in 2001. Heis currently a Ph.D. candidate in computerscience and engineering at Korea Univer-sity, Korea. He is also a Manager of the Net-work Operation Center in Korea Telecom.His main fields are in wireless network, adhoc mobility management, and network security.
Heyi-Sook Suh received the B.S. degreein computer science from SookMyungWomen’s University, Korea, in 1988, theM.S. degree in computer education fromKorea University, and the Ph.D. degree incomputer science from Korea University.She is currently an Assistant Junior Offi-cial in the Ministry of Education & Hu-man Resources, Seoul, Korea. She is alsoa researcher at the Center for Modeling &Simulation in Korea Institute for Defense Analyses (KIDA). Her
main fields are in wireless network, mobility management, networksecurity, HLA/RTI, and so forth.
SangKeun Lee received his B.S., M.S., andPh.D. degrees in computer science and engi-neering, Korea University, Seoul, South Ko-rea, in 1994, 1996, and 1999, respectively.Since 2003, he has been an Assistant Pro-fessor in computer science and engineer-ing, Korea University, Seoul, South Korea.His research interests include data manage-ment in mobile/pervasive computing sys-tems, location-based information systems,XML databases, and mobile ad hoc networks.
Chong-Sun Hwang received the M.S. de-gree in mathematics from Korea University,Korea, in 1970, and the Ph.D. degree in stat-ics and computer science from the Univer-sity of Georgia in 1978. From 1978 to 1980,he was an Associate Professor at South Car-olina Lander State University. He is cur-rently a Full Professor in the Department ofComputer Science and Engineering at Ko-rea University, Seoul, Korea. Since 1995, hehas been a Dean in the Graduate School of Computer Science andTechnology at Korea University. His research interests include dis-tributed systems, distributed algorithms, and mobile computingsystems.

EURASIP Journal on Wireless Communications and Networking 2005:5, 743–756c© 2005 Qi Qu et al.
Cross-Layer QoS Control for Video Communicationsover Wireless Ad Hoc Networks
Qi Qu,1,2 Yong Pei,3 James W. Modestino,1 Xusheng Tian,1 and Bin Wang3
1 Department of Electrical and Computer Engineering, College of Engineering, University of Miami, Coral Gables, FL 33124, USAEmails: [email protected], [email protected]
2 Department of Electrical & Computer Engineering, University of California, San Diego, La Jolla, CA 92093-0407, USAEmail: [email protected]
3 Department of Computer Science & Engineering, College of Engineering & Computer Science, Wright State University,Dayton, OH 45435-0001, USAEmails: [email protected], [email protected]
Received 21 June 2004; Revised 12 May 2005
Assuming a wireless ad hoc network consisting of n homogeneous video users with each of them also serving as a possible relaynode for other users, we propose a cross-layer rate-control scheme based on an analytical study of how the effective video trans-mission rate is affected by the prevailing operating parameters, such as the interference environment, the number of transmissionhops to a destination, and the packet loss rate. Furthermore, in order to provide error-resilient video delivery over such wireless adhoc networks, a cross-layer joint source-channel coding (JSCC) approach, to be used in conjunction with rate-control, is proposedand investigated. This approach attempts to optimally apply the appropriate channel coding rate given the constraints imposed bythe effective transmission rate obtained from the proposed rate-control scheme, the allowable real-time video play-out delay, andthe prevailing channel conditions. Simulation results are provided which demonstrate the effectiveness of the proposed cross-layercombined rate-control and JSCC approach.
Keywords and phrases: ad hoc, video transmission, throughput capacity, effective transmission rate, packet delay, joint source-channel coding.
1. INTRODUCTION
In a wireless ad hoc network, packets are sent from node tonode in a multihop fashion until they eventually reach theintended destination. As multimedia is expected to be a ma-jor traffic source on next-generation wireless networks, therehas been increasing research interest in the delivery of mul-timedia services over such wireless ad hoc networks [1, 2, 3].A data partitioning scheme, together with multipath rout-ing for protecting against failures of links due to topologi-cal changes and packet losses due to fading effects, was pre-sented in [1, 2] assuming perfect network state information.In [3], a source coding-based approach using multiple de-scription coding is presented to take advantage of path di-versity as a means to improve packet-loss resilience. How-ever, these works, as well as much previous work appearing
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
in the literature, target the problem from an individual user’spoint of view without considering the overall system capac-ity and fairness in a multiuser environment; these are criti-cal issues in ad hoc networks. As a result, it remains unclearwhat level of video quality can be supported by an ad hocnetwork.
Typically, for video communications over wireless ad hocnetworks, there are two main factors which can greatly af-fect the perceived video quality: the effective transmission rateassociated with a source-destination pair and the transmis-sion errors over representative wireless links along the cor-responding path. Basically, the effective transmission rateis the highest signaling rate that can be reliably supportedalong a path and is constrained by interference betweentransmissions of neighboring nodes and the burden of sup-porting multihop transmissions between the source and des-tination as demonstrated, for example, in [4]. The cause ofthe throughput restriction in ad hoc networks is the perva-sive need for all nodes to share channels locally with othernodes. For example, nodes close to a receiver are required

744 EURASIP Journal on Wireless Communications and Networking
to be idle to avoid collisions which would otherwise causeloss of packets for the intended receiver. If the operatingrate is higher than the effective transmission rate along apath, many packets will be discarded due to channel over-pumping. Thus, a rate-control scheme is both desirable andnecessary to limit/eliminate the amount of lost packets andachieve a satisfactory level of received video quality overad hoc networks. On the other hand, packet losses due totransmission errors are generally caused by channel fading,multipath effects, and interference from other electronic de-vices, as well as node mobility. These two factors shouldbe considered jointly since the effective transmission rateavailable greatly affects the performance of error-resiliencetools that can be used to combat the transmission errors asshown in [5]. More specifically, in order to achieve satis-factory video quality over ad hoc networks, it is necessaryto provide a tradeoff between both kinds of packet lossessubject to available resources. However, to the best of ourknowledge, almost all of the current literature has consid-ered these two factors separately and independently and pro-posed separate techniques to improve perceived video qual-ity. In order to achieve improved video quality supported byad hoc networks, and to provide a more robust video deliv-ery system, these two factors are jointly considered in thispaper.
We have investigated the capacity of a wireless ad hocnetwork in supporting packet video transport in [6] wherewe studied an ad hoc network consisting of n homogeneousvideo users with each of them also serving as a possible relaynode for other users. We quantitatively investigated how theeffective video throughput, and the resulting delivered videoquality, is affected by the distance between the source anddestination, measured as the number of hops required for apacket to reach the destination from the source. The resultsindicate that appropriate video coding rate control has to beemployed in order to efficiently utilize the network capacity.
Unfortunately, the wireless channel is highly error-pronedue to fading, multipath attenuation, and other impair-ments, which often cause packet losses. Moreover, for real-time video applications, variable network delay may causeadditional losses of video data due to late arrivals. Further-more, the reconstructed video quality associated with theuse of advanced hybrid video coding approaches is very sen-sitive to network-induced packet losses. Therefore, error-resilient video communication techniques have received sig-nificant attention in recent years and many error-mitigationtechniques have been proposed and investigated. Among theerror-resilience techniques proposed, forward error correc-tion (FEC) and automatic repeat-request (ARQ) are two ba-sic error control techniques widely used to combat trans-mission errors [5, 7, 8, 9, 10]. FEC is traditionally used forreal-time multimedia traffic since it requires no feedback andthe delay can be bounded, while the drawbacks of FEC cod-ing are that it requires additional bandwidth to transmit theparity packets and also has the potential for introducing in-creased latency. ARQ, on the other hand, requires a loweroverhead than FEC since retransmission is only requiredwhen needed. But in some cases, the propagation and other
delays are so large that retransmission may become unac-ceptable due to the resulting increased latency. Therefore, inad hoc networks, due to the multihop transmission charac-teristics and stringent delay requirements for real-time videoapplications, FEC is more appropriate than ARQ. However,FEC should be applied in an adaptive fashion which can dy-namically adapt to the prevailing operating conditions, thatis, the current channel conditions and the effective transmis-sion rate.
Therefore, based on the preceding discussion, in this pa-per we investigate cross-layer techniques to maximize theperceived video quality employing the H.264 video cod-ing standard operating over wireless ad hoc networks whileconsidering the effective transmission rate and transmissionimparements jointly. Specifically, based on an analysis of theeffects of interference between neighboring nodes and theburden of supporting multihop transmissions, we propose across-layer rate-control scheme which can dynamically con-trol the effective transmission rate1 for video communica-tions from source to destination. This is achieved by feed-back information obtained from the underlying routing al-gorithm. For instance, in ad hoc routing protocols, such as adhoc on-demand distance vector (AODV) [11] and optimizedlink state routing (OLSR) [12], each node is able to maintaina routing table such that for each entry (destination), infor-mation is provided on the hop count (number of hops fromsource to destination). With some simple and slight mod-ifications of the feedback routing update packet format inAODV or OLSR, each node can maintain additional infor-mation for each entry, such as packet-loss rate, bandwidthand interference conditions, required to implement the pro-posed approach. Then, given the effective transmission rateobtained from the proposed rate-control scheme, a model-based joint source-channel coding (JSCC) approach is em-ployed in a cross-layer manner to optimally select the chan-nel coding strategy subject to the constraints on delay andthe prevailing channel conditions. As a result, the end-to-endquality of service (QoS) for video communication over wire-less ad hoc networks can be significantly improved by takinginto account both the effective transmission rate and channelerror effects.
The rest of this paper is organized as follows. In Section 2,we provide some technical preliminaries, which include abrief description of H.264 and the use of interlaced Reed-Solomon codes for this application. In Section 3, we firstdetermine the throughput capacity of the ad hoc networkunder an assumed homogeneous traffic pattern, and thenwe propose a cross-layer rate-control scheme based on theobtained analytical results. In Section 4, we propose a cross-layer joint source-channel coding (JSCC) approach given theeffective transmission rate and an imposed delay constraint.In Section 5, we present some selected simulation results for
1Note that the effective transmission rate considered in this paper onlytakes into account the effect of interference between neighboring nodes andthe burden of supporting multihop transmissions. It does not consider theeffect of packet losses occurring on wireless links.

Cross-Layer QoS Control for Video over Ad Hoc Networks 745
RTP-H.264 packet video delivery over ad hoc networks. Fi-nally, Section 6 provides a summary and conclusions.
2. PRELIMINARIES
2.1. RTP-H.264
The H.264 standard is a newly developed video coding stan-dard resulting from a joint effort of both ITU-T and ISO.The syntax of compliant H.264 coding is expected to resultin an average reduction in bit rate by at least 50% com-pared to previous standards for the same video fidelity. Inaddition, H.264 also provides several built-in error-resiliencetools, such as intraupdating and data partitioning, as wellas flexible network adaptation, to combat packet losses overerror-prone wireless networks. This makes H.264 an attrac-tive candidate for wireless video transport applications, asthe bandwidth resource is extremely costly in wireless envi-ronments and the packet losses induced by bit errors or linkoutages are quite common.
Because of the ubiquity of the Internet, and its well-entrenched networking protocols, we concentrate on the useof IP at the network level. At the transport level, although tra-ditional ARQ strategies for point-to-point multimedia trans-mission (such as in TCP) may be feasible in some appli-cations, implementing these protocols while satisfying thestringent real-time delivery requirements is clearly inappro-priate. As a result, real-time applications typically use theUDP/IP combination which provides an unreliable packetdelivery service. the real-time transport protocol (RTP) wasdeveloped to enable real-time multimedia applications overIP networks.
For the packetization scheme employed, in this paper, theRTP/UDP/IP protocol stack is used to support video applica-tions over wireless ad hoc networks as in [13]. Specifically,we assume QCIF formatted video and we packetize eachvideo slice within one video frame into a single RTP/UDP/IPpacket. Since one QCIF video frame has nine slices, thus onevideo frame is packetized into 9 RTP/UDP/IP packets as in[7].
2.2. Interlaced RS encoding
In this paper, we use interlaced Reed-Solomon (RS) channelcoding as described in [5, 14]. Basically, this scheme operatesby aligning k successive data packets vertically, each of whichis subsequently partitioned into q-bit symbols. An RS(n, k)code is used to encode the vertically aligned q-bit symbols toproduce n− k parity packets. Each of the resulting n packetsis then encapsulated as a RTP/UDP/IP packet to be transmit-ted over the wireless network. The size of the data packetsis assumed fixed and taken as just large enough to containa single slice. This requires that each slice has the same size,which can be achieved with appropriate padding bits.
With the use of the RTP protocol, if a packet is consideredlost, the RTP sequence number enables the FEC decoder toidentify the lost packet, so that the location of the missingpacket is known. As a result, some or all of the lost packetscan be recovered through the use of the erasure-correcting
capability of the FEC coding employing the correspondinglocation information of the lost packets.
Given the stringent delay constraints for real-time videoservices, it is desirable to keep the additional delay intro-duced by interlaced RS coding to within a single video frame.Since each QCIF frame is composed of 9 slices, this sug-gests the use of RS(n, 9) codes. For example, the use of theRS(15, 9) code, with corresponding symbol size q = 4 bits,provides an erasure-correcting capability of n − k = 6, thatis, up to 6 packet losses can be fully recovered. However, itshould be noted that the use of FEC coding clearly intro-duces additional overhead which increases the actual trans-mission rate. On the other hand, use of larger values of n canprovide improved erasure-correcting capability but at the ex-pense of excessive overhead which reduces the bit rate avail-able for source coding and introduces a larger delay. In pre-vious work [5, 7], we have demonstrated that, given the em-ployed packetization approach as discussed previously, theRS(15, 9) code can provide excellent erasure-correcting ca-pabilities in combating packet losses over wireless networkseven under severe channel conditions, say packet-loss rategreater than 5%. Therefore, in what follows, we assume thatthe RS(15, 9) code is the strongest RS code we can apply andmake exclusive use of the primitive RS(15, 9) code and itspunctured versions resulting in a class of RS(n, 9) codes with9 ≤ n ≤ 15.
The main reasons why we do not employ an ARQ schemeto provide the error-recovery mechanism for real-time videocommunications over wireless ad hoc network are the fol-lowing. (1) FEC coding, especially using RS codes, is quiteeffective in dealing with bursty packet losses commonly en-countered on wireless ad hoc networks while ARQ, in the faceof bursty packet losses, would introduce a substantial delaydue to the requirements for retransmitting the lost packets.(2) As can be seen in Section 4.3, the delay introduced bythe proposed FEC coding is much lower than that achievablewith ARQ since the delay introduced by FEC coding (n −k) × ∆T is much less than the round-trip transmission time2× TT that is necessary to transmit a packet from the senderto the receiver and obtain the appropriate ACK/NACK mes-sages from the receiver in a typical multihop-transmissionscenario.2
Based on the discussions above, in this paper we con-centrate on using FEC coding as the error-recovery schemefor real-time video applications over wireless ad hoc net-works.
3. PROPOSED CROSS-LAYER RATE-CONTROLSCHEME
As discussed previously, the effective transmission rate as-sociated with a source-destination path in a wireless adhoc network supporting packet video is affected by several
2The quantities ∆T and TT are the interarrival time between successivepackets in seconds, and the delay in transmitting a packet from sender toreceiver, respectively.

746 EURASIP Journal on Wireless Communications and Networking
parameters, such as the number of hops between source anddestination [15, 16], and the number of interference neigh-bors of intermediate nodes along the path. As shown in[15, 16], it is clear that as the number of hops between sourceand destination increases, the corresponding effective trans-mission rate decreases accordingly. In this section, we willfirst determine the effective transmission rate for each nodein a wireless ad hoc network under a specified traffic patternand then propose the use of a cross-layer rate-control schemebased on the resulting analysis.
We consider a wireless ad hoc network consisting of n ho-mogeneous nodes, each of which generates the same amountof video traffic and employs the same traffic pattern as de-fined in what follows. Video packets are sent from node tonode in a multihop fashion until they eventually reach thedestination, that is, each user has to relay traffic for otherusers besides being the source for its own traffic. We assumethat the ith node has a transmission rate of Wi bits per secondand that only those nodes that are adequately spatially sepa-rated to provide no destructive interference to each other cantransmit simultaneously.
We assume that the n nodes are uniformly distributed ina domain of unit area. They are considered to be homoge-neous, having the same transmission power level when theycommunicate with each other.
3.1. Traffic pattern
While a random traffic model is assumed in [4], in this paperwe propose a different traffic scenario in order to investigatethe relationship between the source-destination distance andthe delivered video quality. We will characterize the trafficpattern in terms of the number of hops L taken between thesource and destination. Specifically, for the above-defined adhoc network consisting of n homogeneous users, when wesay that the traffic pattern is L = k, we mean that the des-tination is located exactly k hops away from the source. Asa result, the video data has to be relayed through anotherk − 1 intermediate nodes in order to reach the destination.We also assume that each node is equally likely to commu-nicate with each of the nodes that are L hops away from it.Intuitively, as L increases, more transmission bandwidth hasto be allocated since the increasing relay traffic leads to lesseffective video throughput for each user. The purpose of thissection is to quantitatively assess this effect. In this paper, weconsider a homogeneous traffic pattern, that is, L is constantfor all the users and traffic. An analysis of the case of het-erogeneous traffic patterns will be presented in subsequentwork.
3.2. Interference model
There are a number of possibilities available for an inter-ference model to be used in assessing the performance ofwireless ad hoc networks. For example, in [4], a “protocolmodel” is used to assess the asymptotic capacity of an adhoc wireless network operating in a limited domain as thenode density increases. According to this model, a transmis-
sion from node Xi to node Xj is successful if the followingtwo conditions are satisfied.
(i) Node Xj is within the transmission range of node Xi,that is,
∣∣Xi − Xj
∣∣ ≤ r, (1)
where |Xi −Xj| represents the distance between nodesXi and Xj in the domain and r is the effective commu-nication range of each node.
(ii) For every other node Xk that is simultaneously trans-mitting over the same channel, it must satisfy
∣∣Xk − Xj
∣∣ ≥ (1 + δ)∣∣Xi − Xj
∣∣. (2)
This condition provides a guard zone to prevent the in-terference between neighboring transmissions on thesame channel at the same time. The parameter δ > 0defines the size of the guard zone.
Using this interference model, it is shown in [4] that thecorresponding number of interference neighbors for a node,c depends only on δ and grows no faster than linearly in (1 +δ)2. Based on this observation, the authors demonstrate thatthe asymptotic capacity goes to zero as the number of nodesn increases.
In this work, we adopt a much simpler and less ab-stract interference model which is more related to physi-cally meaningful and observable network quantities. Thismodel is directed toward the assessment of video deliv-ery quality rather than evaluation of asymptotic capacityas in [4]. More specifically, we assume that the number ofinterference neighbors associated with a node can be de-termined and provided to each of the nodes based uponfeedback information made available through the embed-ded routing algorithm employed. Specific implementationof a scheme for providing this information is provided inSection 3.4.
3.3. Throughput capacity
We consider the problem of estimating the supportablethroughput under the above-specified traffic pattern de-scribed in Section 3.1. We provide a simple scheme to esti-mate the supportable throughput based on the number ofinterference neighbors associated with a node which we as-sume is known. Furthermore, we assume that the numberof interference neighbors can be obtained through the un-derlying routing algorithm as detailed in the subsequent sec-tion.
We begin by first assuming that each node has the samenumber of interference neighbors c and the transmission ratefor each node is constant, that is, Wi = W . Furthermore,we assume that there is a spatial scheduling policy such thateach node gets one slot to transmit data in every (1 + c) slots,and such that all transmissions are received interference-free

Cross-Layer QoS Control for Video over Ad Hoc Networks 747
within a distance of r from their sources.3 Without consider-ing the boundary regions, the number of concurrent trans-missions φ is then upper-bounded by
φ ≤ n
1 + c. (3)
As a result, the degradation of the maximum transmissionrate for each node is then bounded by
β = φ
n≤ 1
(1 + c). (4)
Therefore, the degradation of the transmission rate of anynode due to the interference between adjacent neighbors isalso bounded by β. This results in a transmission rate in bitsper second for any node,
σ = βW ≤ W
(1 + c). (5)
However, this transmission rate is not the same as thecorresponding effective throughput for a node. This is be-cause part of the transmission rate obtained from (5) servesto relay traffic for others. As we will demonstrate next, theeffective throughput for a node will also depend on the cor-responding traffic pattern as defined in the preceding section.
Specifically, when L ≥ 1, following (5), the aggregatetransmission rate of the entire ad hoc network in bits per sec-ond is given by
nσ = nβW ≤ nW
(1 + c). (6)
Because the traffic model is homogeneous, we have the effec-tive useful data rate, or throughput, for a single user given by
Reffective = nσ
nL= βW
L≤ W
(1 + c) · L , (7)
where the factor L appears in the denominator to reflect thefact that each node must transmit the relay traffic in addi-tion to its own traffic. As a result, it follows that in an adhoc network, the effective transmission rate for a single userdepends not only on the number of interference neighborsbut also depends on the hop count between source and des-tination. In particular, it is necessary to adaptively adjust thevideo coding rate for each user when the distance L betweensource and destination changes.
However, in the above analysis, we assume that eachnode has the same number of interference neighbors andthe transmission rate for each node is constant. These as-sumptions may not be realistic in an actual network due to
3Note that interference-free transmission does not necessarily result insuccessful transmission, due to wireless channel fading effects.
the rapid change of network topology and physical environ-ments. Therefore, in what follows, we extend the precedinganalysis without these two assumptions; that is, each nodemay have a different transmission rate Wi and a differentnumber of interference neighbors ci.
Therefore, corresponding to (5), the transmission rate inbits per second for the ith node is given by
σi = βiWi ≤ Wi(1 + ci
) . (8)
Since, in general, the effective transmission rate from sourceto destination is constrained by the minimum transmissionrate of a particular intermediate node along the path, by fol-lowing the same analysis procedure as above, the resulting ef-fective throughput for a given source-destination pair is thengiven as
Reffective = min(βiWi
)L
≤ 1L
min(
11 + ci
Wi
), (9)
where the minimization is over all nodes along the corre-sponding path from the source node to the destination node.
Thus, the effective video transmission rate of the sourcenode is constrained by both the distance L between thesource and destination, and the minimum value of βiWi
along the path from the source to destination. It should nowbe clear that the effective available throughput for a givennode in an ad hoc wireless network is affected by a number offactors as described above. Therefore, in order to match thetransmission rate to the effective transmission rate in a videocoding and transmission system, and thereby avoid channeloverpumping, a rate-control scheme is necessary and a spe-cific approach is proposed in what follows.
3.4. Cross-layer rate-control scheme
As can be seen from (9), the effective transmission rate forvideo communication from a specified source to a destina-tion is determined by the number of hops from the source tothe destination (L) as well as the bandwidth (Wi) and thenumber of interference neighbors (ci) of each node alongthe source-to-destination route which is composed of mul-tiple intermediate links. Basically, the embedded routing al-gorithm can provide the above necessary information (i.e.,L, Wi, and ci) to the source node when the route is estab-lished or when a route change occurs. Generally, the value ofL is easily obtained from the routing table since most cur-rent routing algorithms, such as AODV, can provide infor-mation on the hop count between source and destination.Likewise, Wi is the transmission rate for each intermediatenode, and with some slight modification of the routing up-date packet format, this information can also be includedin the routing update messages which are sent back to thesource node from the destination. As for the ci, we can useeither of two alternative methods to obtain the value for eachintermediate node. One is based on the RTS/CTS mecha-nism in IEEE 802.11b [17], which is commonly used in ad

748 EURASIP Journal on Wireless Communications and Networking
Rate-control adaptionat the application layeris based on
(1) hop-count information(network);
(2) number of interferenceneighbors (MAC).
Application layer
Network layer
MAC/link layer
JSCC adaptation at theapplication layeris based on
(1) channel conditions(network);
(2) effective transmissionrate Reffective obtainedby the rate-controlscheme (application).
Figure 1: Illustration of the cross-layer design approach.
hoc networks. More specifically, how many different neigh-boring nodes sending RTS messages to a specified interme-diate node can provide the value of ci for the correspondingintermediate node. For example, if one intermediate nodeobtains RTS messages from 4 different neighboring nodes,this means that it has 4 interference neighbors. However, theRTS/CTS mechanism itself cannot pass this information onthe number of interference neighbors to upper layers; the useof this method would result in a cross-layer design which re-quires some slight modifications of the layered infrastructurein order to enable the delivery of this information to up-per layers as in [18]. The other method is for the node toactively send probing packets periodically, and if any othernodes receive this kind of probing packet, an acknowledg-ment is sent back. Based on how many different nodes sendback acknowledgments, we can determine the number of in-terference neighbors of any intermediate node. These twomethods have respective advantages/disadvantages. The firstmethod is easy to implement and no extra bandwidth is re-quired. But the drawback is that it may not be sufficientlyaccurate since if nodes have no data to send out, they willnot send any RTS messages resulting in ignorance of somepotential interference nodes. On the other hand, the secondmethod is accurate but the drawback is that it needs extrabandwidth and power to send/receive probing and acknowl-edgment packets. However, as indicated in [18, 19], the extrabandwidth requirements generally will be small enough andshould not be a burden when this method is applied.
Generally, based on connectivity, the routing algorithmcan provide a set of candidate routes from the source to des-tination, and using (9), we can calculate the effective trans-mission rate for each candidate route. Instead of using theleast-hop route, our routing algorithm then selects from theset of candidate routes the one that maximizes the bound onthe effective transmission rate.
Since the effective transmission rate Reffective is subject tochanges in L, the number of interference neighbors, and thetransmission rate of each node, in order to achieve an im-proved perceived video quality, it is necessary to provide arate-control mechanism at the application layer based on theknowledge of Reffective which is obtained through our routingalgorithm.
If a route from source to destination has already beenestablished, each time the source node encodes/sends video
packets, it first checks its routing table to obtain the informa-tion on L, Wi, and ci from the source to the desired destina-tion. Based on the obtained information, and using (9), wecan obtain the maximum effective transmission rate whichis available to the source/channel coder. If the destination isno longer listed in the table, the source node initiates a routerequest (RRQ) to discover a new route. As soon as the newroute has been established, the source node can then obtainthe corresponding information on L,Wi, and ci. On the otherhand, when a route change occurs, the route error (RER)message caused by the link outage will be sent to the sourcenode. The source node can use the reception of RER, or theinitiation of RRQ, as an indication of the route change so thatit can change its transmission rate accordingly.
4. CROSS-LAYER JOINT SOURCE-CHANNEL CODING
Using the rate-control scheme from the previous section,each time the source node encodes/transmits video frames,we can obtain the information on the effective transmissionrate Reffective. As discussed previously, performance variationsdue to changes of the maximum effective transmission rateare only one of the two factors which have a major effecton perceived video quality. In this section, given the effec-tive transmission rate Reffective obtained from the proposedrate-control scheme, we describe the application of a cross-layer (JSCC) approach subject to a delay constraint and theprevailing operating channel conditions. We use interlacedRS codes as the channel coding strategy and employ theH.264 video coding standard as the source coding/decodingapproach. This combination of rate control and JSCC rep-resents a cross-layer approach as shown in Figure 1. Morespecifically, the use of the rate-control scheme requires thecooperation of the application layer, network layer, and MAClayer. First of all, the proposed rate-control scheme operat-ing at the application layer requires information on the hopcount from the routing algorithm at the network layer andinformation on the number of interference neighbors ac-quired at the MAC layer in order to determine the effectivetransmission rate for each source-destination pair; secondly,the proposed JSCC approach, as shown in what follows, re-quires information on the effective transmission rate as wellas the prevailing channel conditions, including the transmis-sion delays and information on the underlying packet-loss

Cross-Layer QoS Control for Video over Ad Hoc Networks 749
process, which are obtained at the network layer by the em-bedded routing algorithm. This information is required inorder to optimally select the source/channel coding rates.
In this paper, we use RS(n, 9) to denote the specific inter-laced RS code used; T denotes the maximum allowable delayfrom the source to destination for video delivery, TFEC de-notes the delay introduced by FEC coding/decoding, and TT
denotes the delay in transmitting a packet from sender to re-ceiver, that is, the sum of packetization delay, propagationdelays over intermediate links, and queuing delays in inter-mediate nodes; Rs and Rc denote the source coding rate andchannel coding rate, respectively.
The overall end-to-end performance will be measured bythe resulting PSNR values for a video sequence of Nf con-secutive frames and includes channel error effects as well assource coding losses. For a given effective transmission rateReffective, PSNR(Rs,Rc) can be determined for each combina-tion of source coding rates Rs = (R1
s ,R2s , . . . ,Rm
s ), and thecorresponding channel coding rates Rc = (R1
c ,R2c , . . . ,Rm
c ).4
The corresponding optimal operating parameters (Rs, Rc) aregiven as
(Rs,Rc
) = argmax
PSNR(Ris,R
ic
), 1 ≤ i ≤ m, (10)
where the maximization is performed over all possible com-binations of Ri
s and Ric subject to the constraints
TFEC + TT ≤ T ,
Rs
Rc≤ Reffective,
(11)
together with knowledge of the prevailing channel condi-tions.
In what follows, we first describe the packet-loss patternapproximation employed in this paper to represent the chan-nel packet-loss process and analyze the delay introduced byFEC coding. Then, based on this analysis, we introduce theproposed cross-layer JSCC approach for video transmissionover wireless ad hoc networks.
4.1. Loss pattern approximation
Although FEC coding is very effective in combating the ef-fects of packet losses over wireless channels, the FEC cod-ing gain is achieved at the cost of source coding efficiencygiven the total available transmission rate. Specifically, whenthe packet-loss rate is high, we prefer to use stronger FECcodes, while when the packet-loss rate is low, weaker FECcodes or even no FEC coding are preferred [5]. Therefore, inorder to exploit FEC coding optimally, we need to specify theloss pattern of the underlying wireless links. In particular, forpacket video transmission over ad hoc networks, the packet-loss patterns over all the intermediate links which make up
4In this paper, Ric ∈ 1, 9/10, 9/11, . . . , 9/15 given the packetization
scheme discussed in Section 2 and Reffective = Ris/R
ic .
g b1− pi 1− qi
pi
qi
Figure 2: State transition diagram for the Gilbert channel.
the route from source node to destination should be trackedindividually. In this paper, the loss pattern for each individualintermediate link is modeled by a two-state Gilbert channel.
4.1.1. Error pattern for individual intermediate links
The Gilbert model [20], as illustrated in Figure 2 for a two-state version, has been widely used in the literature for cap-turing the packet-loss patterns of wireless fading channels. Inthis figure, g (good) and b (bad) represent successful packetreception and packet-loss states, respectively. The two-stateGilbert model for the ith link associated with a source-destination pair can be completely specified by two param-eters: the packet-loss rate Pi
L and the average burst length LiB.Based on the two values Pi
L and LiB, we can easily calculatethe associated transition probabilities of the ith link modeledby a Gilbert channel according to
pi = PiL
LiB(1− Pi
L
) ,
qi = 1LiB
.
(12)
Then, the steady-state occupancy probabilities for the corre-sponding channel are given by
πi(g) = qipi + qi
,
πi(b) = pipi + qi
.(13)
4.1.2. Link aggregation
Generally, the route from the source to destination is a com-bination of several intermediate links. Although it is straight-forward to compute the end-to-end loss probabilities by con-sidering each of these links individually, this computationcan be greatly simplified by using a single Gilbert channel[21] which can be used to approximate the end-to-end lossbehavior of the corresponding source-destination path. As-sume that the consecutive links are independent and thereare a total of h intermediate links between source and desti-nation which are represented by the channel vectors PL =(P1
L,P2L, . . . ,Ph
L) and LB = (L1B,L2
B, . . . ,LhB). We can directlycompute the packet-loss rate PL and the average burst length

750 EURASIP Journal on Wireless Communications and Networking
LB for the single Gilbert channel corresponding to this pathas
PL = 1−h∏i=1
πi(g),
LB = 1−∏hi=1 π
i(g)(∏hi=1 πi(g)
)(1−∏h
i=1
(1− pi
)) ,
(14)
where πi(g) is the steady-state occupancy probability for eachintermediate link which can be obtained from (13); pi is thetransition probability calculated from (12).
After we obtain the two corresponding Gilbert parame-ters, the entire route from the source to destination can bemodeled by this aggregate loss model. This model is em-ployed in this paper to dynamically apply the JSCC approachas described in what follows. It should be noted that thisapproach is suboptimal compared to a link-by-link codingapproach, since the individual intermediate link error con-ditions may be greatly different from each other, that is,one link may have very low packet-loss rate while anotherone may have a very high packet-loss rate. Generally, if wecan distinguish link error conditions for each intermediatelink and then design optimal source/channel coding strate-gies on a link-by-link basis, further performance gain canbe expected. However, this requires the use of some form oftranscoding scheme which will introduce much higher com-putational complexity, a much larger delay, and consumesmore power, and is inconsistent with the IP network proto-col. Therefore, it is not efficient in ad hoc networks, especiallywhen the number of hops between source and destination islarge. In this paper, despite its suboptimality, we make use ofthis simple aggregate Gilbert model to represent the path-lossbehavior instead of individually considering each link.
4.2. FEC coding delay
As mentioned earlier, FEC coding delay is an important fac-tor to be considered for practical operation of the proposedapproach. In general, this coding delay depends on the par-ticular code employed, the stochastic nature of traffic, andthe processing speed. In this section, we incorporate the FECcoding delay as a constraint in an objective design criterion.We assume use of systematic RS(n, k) codes so that, as shownin [14], the information packets can be transmitted as gener-ated while at the same time, they are locally buffered to allowthe computation of the parity packets. Furthermore, assum-ing sufficient processing power, the time required to generatethe parity packets at the encoder is negligible. As a result, theFEC delay is incurred solely at the decoder. In particular, ifthere are losses of information packets, the receiver has towait until the arrival of the parity packets in order to makea possible recovery. The delay caused by using RS codes canthen be characterized as the waiting time for the additionalparity packets at the receiving end as suggested in [14].
As shown in [14], the introduced FEC delay is relatedto the interarrival time of packets received within a video
frame. Here, we assume a particular model for the interar-rival time of packets received within a corresponding frame.Specifically, packets received in a frame are assumed to beuniformly spaced. In reality, for any general video sequence,the packet delay introduced is a function of the image resolu-tion, the frame rate, the encoder operating rate, and the net-work delay variability. Theoretical evaluation of this delay isgenerally not possible. Likewise, experimental determinationof the delay caused by using FEC coding is generally not pos-sible in most real-time applications since the encoded videomaterial is not available prior to the start of transmission. Insuch cases, it is necessary to have approximate a priori esti-mates of the FEC delay. We now provide an expression for anapproximate evaluation5 of the FEC delay under the assump-tion that the packets are uniformly and periodically receivedover a frame, that is, we neglect the network delay variability.Let ∆T denote the interarrival time between successive pack-ets in seconds, let k be the number of information packetswithin one video frame, and let n− k be the number of par-ity packets. Then the delay in waiting for the required FECparity packets at the decoder is
TFEC = (n− k)∆T (15)
with
∆T = 1f · n , (16)
where f is the video frame rate in frames/s, and n is the num-ber of encoded packets generated in a particular video frame.For example, if the frame rate were 30 frames/s, and 15 pack-ets were generated for each frame, the interarrival time forthe packets is taken as 1/(30 × 15) second. This would thencorrespond to an interarrival time delay of 2.22 millisecondsand for the use of the RS(15, 9) code, this would result inTFEC = 13.32 milliseconds.
In later sections, this expression will prove useful in ob-taining a priori estimates of the overall FEC coding delay forsequences coded at any rate.
4.3. Code selection policy
Since the application of FEC, subject to a fixed-over-transmission rate, requires throttling the coding rate to ac-commodate the FEC overheads, the FEC coding gain isachieved at the cost of source coding efficiency. A fixed FECcode cannot guarantee satisfactory performance for all pos-sible channel conditions as demonstrated in [5]. Therefore,in this paper, we use a simple model-based approach to dy-namically select the FEC codes, specifically RS(n, k) codes.
At the source node, the allowable delay caused by the FECdecoding at the destination is determined by the total allow-able delay T together with TT , the delay in transmitting a
5The expression for analytical evaluation of the FEC delay is an approxi-mation due to the fact that it assumes that the packet-to-packet variation inthe rate is negligible.

Cross-Layer QoS Control for Video over Ad Hoc Networks 751
packet from sender to receiver. We assume that the transmis-sion delay TT is constant for the period of sending one videoframe. The set of feasible RS codes capable of meeting theimposed delay constraint must then satisfy6
TFEC + TT = (n− k)∆T + TT ≤ T , (17)
which is equivalent to
n ≤ T − TT
∆T+ k, (18)
where the total delay T is preset as a threshold for the under-lying real-time video application; TT can be obtained by theunderlying routing algorithm and is sent back to the sourcenode. Thus, given TT , we can find a set of feasible RS codesat the source node under the delay constraint using (18).
Since in this paper the channel coding rate Rc is deter-mined by Rc = k/n, every RS code found in the previousstep under the imposed delay constraint corresponds to anequivalent channel coding rate. Thus, we can obtain a set ofpossible channel coding rates Rc = (R1
c ,R2c , . . . ,Rm
c ) from theprevious step. At the same time, we can obtain a set of corre-sponding source coding rates Rs = (R1
s ,R2s , . . . ,Rm
s ), accord-ing to
Ris = Reffective × Ri
c, i = 1, 2, . . . ,m. (19)
As for packet video transport over networks, the recon-structed video quality is affected by both source compressionand quality degradation due to packet losses. In this paper,we assume that the two forms of induced distortion are inde-pendent and additive [22]. Thus, we can calculate the overalldistortion in terms of MSE as
Dd = Ds + Dc, (20)
where Dd denotes the overall distortion; Ds and Dc denotethe distortion induced by source compression and channelerrors, respectively.
Based on [22], the distortion caused by source compres-sion can be approximated by
Ds =(
θ(Rs − R0
))
+ D0, (21)
where Rs is the source coding rate; θ,R0, and D0 are the pa-rameters of the distortion model which depend on the en-coded video sequence as well as on the intracoding strategy
6However, it is worthwhile to point out that in an ad hoc network, thedelay in transmitting a packet from sender to receiver TT is much greaterthan the interarrival time between successive packets ∆T . As a result, theproposed FEC-based error-recovery scheme will still result in a substantiallyreduced delay compared to the ARQ-based scheme, which requires at leastone extra round-trip transmission delay 2 × TT even if an ideal feedbackchannel is available.
employed. These three parameters can be obtained by themethod used in [6, 22].
Likewise, as in [22], the distortion caused by channel er-rors can be modeled by
Dc = αPLE, (22)
where α depends on the encoded video sequence as well asthe encoding structure, for example, packetization schemeand intracoding ratio. PLE is the residual packet-loss rate ofthe underlying equivalent Gilbert channel after employing anRS(n, k) code. Based on the approach proposed in [22], theresidual packet-loss rate can be easily computed.
So, given the encoded video sequence as well as source/channel encoding structures, the overall distortion can bemodeled as
Dd = Ds + Dc = θ
Rs − R0+ D0 + αPLE. (23)
Therefore, for each feasible pair (Ris,R
ic), we compute the
overall distortion at the source node using (23). The pairwith the minimum Dd is selected as the source/channel cod-ing strategy for the video frames within the current routingupdate interval at the source node. Then the correspondingencoded video packets plus the parity packets are sent to thedestination. In Algorithm 1, we summarize the code selec-tion procedure proposed above.
5. SELECTED SIMULATION RESULTSAND DISCUSSIONS
5.1. Simulation configuration
We performed several simulations to demonstrate the effi-cacy of the proposed joint rate-control and JSCC approach.In this paper, we used the QCIF Susie test sequence at framerate 30 fps in our simulations to stream from a server to aclient with a maximum allowable total delay T = 200 mil-liseconds. The sequence is coded at constant bit rate (CBR)[23]. The first frame of every group of pictures (GoPs), whichis composed of 30 frames, is intracoded and the rest of theframes are intercoded as P frames without slice-based in-traupdating. The use of the GoP structure is motivated bythe error-prone network conditions in wireless ad hoc net-works and the intracoded I frame in every GoP can ef-fectively terminate the error-propagation effects in decodedvideo frames [5] resulting in improved reconstructed videoquality.
In order to provide a representative evaluation of systemperformance, for each simulation run we generate a randomad hoc topology on the disc of unit area as a 2D Poissonpoint process with total number of nodes equal to 30. Thetransmission range r for each node is kept constant duringthe simulation at the value of r = 0.2 × (1/
√π) such that
the sum of the transmission regions for all the 30 nodes (i.e.,30×πr2 ≈ 1) almost completely covers the unit disc, thus en-suring a high degree of connectivity. This choice of the valuefor r can be justified by [24] where it has been shown that

752 EURASIP Journal on Wireless Communications and Networking
Step 1. Using the delay constraint (18), find a feasible set of RScodes and the corresponding source coding rates.
Step 2. Use the overall distortion model (23) to approximate theoverall distortion for each pair of feasible source/channelcoding rates.
Step 3. Select the feasible pair with minimum overall distortion asthe source/channel coding strategy for frames within thecurrent routing update interval.
Algorithm 1: Code selection procedure.
if we assume that each node in an ad hoc network has con-stant power (transmission range), there is a critical transmis-sion power required to ensure with high probability that anytwo nodes in the network can communicate with each otherthrough multihop paths.
Each node in the randomly generated ad hoc networkis assigned the fixed transmission rate Wi = 2 Mbps, whichis a basic rate available in the IEEE 802.11b standard, andthe number of interference nodes ci is assigned according tothe generated topology as well as the transmission range foreach node. For each link in the ad hoc network, the packet-loss behavior caused by transmission errors is modeled asa two-state Gilbert model as in [21]. The available packet-loss rate for each link is uniformly assigned in the range of0.5%− 10% and the available average burst length is selecteduniformly in the range 1–4. After we obtain the two param-eters of the Gilbert model for each intermediate link, the en-tire route from the source to destination can be modeled byan aggregate Gilbert model as discussed previously. Lastly, asshown in [25], the delay in using AODV on a per-link ba-sis, not including queuing delay, is about 20–40 millisecondsgiven the packet size’s range of our scenario, so the delay ofeach node-link pair is assigned uniformly in the range of 20–60 milliseconds. This quantity includes the propagation de-lay, the processing delay, as well as queuing delay in our sim-ulation. Given a randomly generated topology, we initiallychoose a source-destination pair and stream the video fromthe source to the destination using the path with the highesteffective transmission rate as described in Section 3.4. Dur-ing transmission, the environments are updated every 1 sec-ond which can cause changes in the effective transmissionrate and channel conditions. During successive 1-second in-tervals, the environments are kept constant.
5.2. Performance evaluation of therate-control scheme
To demonstrate the effectiveness of our proposed rate-control scheme, we use a representative drop-tail scheme forcomparison which does not use rate control. More specifi-cally, it employs a fixed source coding rate Rs = 96 Kbps andwhen the rate exceeds the current effective transmission rateavailable for the selected source-destination pair, it will dropthe subsequent encoded packets.
In Figure 3, we show a performance comparison be-tween our proposed rate-control scheme and the drop-tail
scheme in the scenario where packet losses are caused onlyby channel overpumping7 and no FEC coding is employed.It should be noted that due to the use of CBR encoding, thevideo quality is not constant. As a result of the CBR bit-ratecontrol, the video quality varies periodically [7]. In Figure 3,the average PSNR using the proposed rate-control scheme is34.77 dB while it is 33.36 dB for the case of no-rate control.Thus, a 1.5 dB performance gain can be achieved using theproposed rate-control scheme. From the channel profile, alsoillustrated in Figure 3, we can see that for GoP no. 1, no. 2,and no. 4, the effective transmission rate constrained by in-terference and multihop transmission is higher than the fixed96 Kbps. Thus, using rate control can fully exploit the ef-fective transmission rate resulting in improved performancecompared to using a fixed-rate coding scheme. On the otherhand, for GoP no. 3, it is obvious that the fixed source cod-ing rate is higher than the prevailing effective transmissionrate; therefore, packet losses will occur when the transmis-sion buffer is full resulting in the last couple of frames beinglost which cause substantial performance degradation. A lostframe is concealed by just copying the previous frame and ifseveral consecutive frames are lost, the degradation will beeven more serious since the concealed frames are then usedas correctly received frames to conceal the subsequent lostframes. This results in substantial error propagation. For ex-ample, in Figure 3, we can see that there is substantial perfor-mance degradation around the 90th frame for the no-rate-control case due to channel overpumping. Furthermore, al-though the performance degradation caused by the channeloverpumping packet losses has been partially compensatedusing passive error concealment (PEC), the performance isstill not as good as using the rate-control scheme.
Therefore, since the proposed rate-control scheme canadapt to the changes in the transmission environments, thatis, the number of interference neighbors and the number ofhops between source and destination, it can enable the videoencoding system to adapt to the corresponding changes inthe effective transmission rate. On the other hand, if we donot use a rate-control scheme, the fixed-rate coding schemewill always cause performance loss. More specifically, if thefixed rate is lower than the effective transmission rate, per-formance loss is due to the source coding inefficiency result-
7Here, we assume that no transmission errors occurred.

Cross-Layer QoS Control for Video over Ad Hoc Networks 753
0 20 40 60 80 100 12020
25
30
35
40
45
50
55
With rate controlWithout rate control
Frame number
PSN
R(d
B)
(a)
GoP no.
Reff (Kbps)
Fixed rate (Kbps)
1
110
96
2 3 4
183 80 120
96 96 96
Corresponding channel profile
(b)
Figure 3: Performance comparison between using rate control and without rate control (fixed source coding rate is 96 Kbps); no FEC isused; packet loss is caused only by channel overpumping; the QCIF Susie sequence.
Table 1: Simulation results for the QCIF Susie sequence.
Run Fixed RS(15, 9) code No FEC coding JSCC
1 29.45 dB 30.56 dB 33.47 dB2 30.56 dB 29.34 dB 33.01 dB3 32.35 dB 31.86 dB 34.73 dB4 30.05 dB 30.94 dB 34.24 dB5 32.69 dB 30.77 dB 35.32 dB
ing from the use of an unnecessarily lower source coding rateat the video encoder. Likewise, if the fixed rate is higher thanthe effective transmission rate, performance loss is caused bypacket losses due to buffer overflow.
5.3. Performance evaluation of the JSCC approach
To evaluate the performance of the joint rate control andJSCC approach, 5 different simulations were conducted forthe QCIF Susie test sequence. These results allow us to ob-serve the relative performance of the proposed JSCC ap-proach compared to two representative fixed-rate chan-nel coding schemes where neither channel coding nor theRS(15, 9) code is used exclusively. Furthermore, the pro-posed rate-control scheme is used for all the above three ap-proaches. Therefore, the packet losses are caused by trans-mission errors or excessive delays or both. The results aretabulated in Table 1. In each row, we show the PSNR of thecorresponding reconstructed video.8
Clearly, the proposed joint JSCC approach outperformsthe other two representative fixed channel coding schemes
8All the simulations are run for 100 iterations in order to obtain statisti-cally meaningful results.
as can be seen from the table. More specifically, the fixedRS(15, 9) code introduces a relatively large delay as describedpreviously and often causes packet losses when the total de-lay exceeds the 200-millisecond threshold. Furthermore, be-cause of the unnecessarily large coding overheads, it cancause performance degradation in source coding efficiencyalthough it is capable of providing stronger FEC protection.Therefore, sometimes it even provides worse performancethan the no-coding case, especially when channel conditionsare relatively good. On the other hand, using no channel cod-ing generally will not introduce unacceptable delay resultingin packet losses, but when channel conditions are poor, sayPL > 5%, it cannot provide the necessary protection againsttransmission errors. However, the proposed JSCC approachcan judiciously achieve an effective tradeoff between sourcecoding and channel coding subject to the constraints on ef-fective transmission rate, allowable end-to-end delay, andprevailing channel conditions. Therefore, improved perfor-mance can be achieved compared to the two fixed channelcoding schemes.
Another interesting point is the distribution of individ-ual frame qualities. The plot in Figure 4 shows the PSNR val-ues for each video frame in the test sequence. It correspondsto one pass in simulation run no. 2. As seen from Figure 4, itshould be clear that using no channel coding will not provideenough protection against channel errors while using thefixed RS(15, 9) code generally will cause extra packet lossesdue to the large delay it induces as well as the correspondingdegradation of source coding efficiency. This is demonstratedin GoP no. 3 and no. 4, that is, from the 61st frame to the120th frame, where we can see that under the imposed de-lay constraint, although using the RS(15, 9) code can providehigher protection, many packets are lost due to late arrivals.

754 EURASIP Journal on Wireless Communications and Networking
0 20 40 60 80 100 12020
25
30
35
40
45
50
55
JSCCWithout channel codingFixed RS(15.9) code
Frame number
PSN
R(d
B)
(a)
GoP no.
PL (%)
LB
Reff (Kbps)
TT (ms)
5.8 13.2 9.7 11.6
1 2 3 4
4.3 5.2 3.8 4.1
146 146 183 183
153 179 196 191
Corresponding channel profile
(b)
Figure 4: Performance comparison between the JSCC approach and the representative fixed channel coding schemes; rate control used inall cases; packet loss is caused by a combination of channel overpumping and excessive delay; the QCIF Susie sequence.
(a) (b) (c)
(d) (e) (f)
Figure 5: Comparison of decoded frames for the Susie sequence at the 37th frame (first row) and the 106th frame (second row); (a), (d) theproposed JSCC approach (PSNR = 32.17 dB, 33.96 dB, resp.); (b), (e) no FEC coding (PSNR = 30.37 dB, 28.52 dB, resp.); (c), (f) the fixedRS(15, 9) scheme (PSNR = 28.52 dB, 27.22 dB, resp.).
Therefore, a substantial performance loss is observed com-pared to either the JSCC approach or the no-channel cod-ing approach. On the other hand, although using no channelcoding results in the best source coding efficiency, there areno error correcting capabilities which can be used to com-bat transmission errors. Therefore, the corresponding per-formance is considerably worse than the JSCC approach.
The above objective results are based on a quantita-tive assessment of reconstructed PSNR values. In Figure 5,we also show some subjective results based on the recon-structed frames taken from the decoded test sequences ofthe simulation run shown in Figure 4. From Figure 5, wecan see that the proposed JSCC approach can provide im-proved subjective performance compared to the other two

Cross-Layer QoS Control for Video over Ad Hoc Networks 755
Table 2: Performance comparison (in PSNR, dB) of the proposedjoint rate-control/JSCC approach for different delay constraints T(milliseconds); the Susie sequence.
Run T = 150 T = 200 T = 300 T = ∞1 32.14 33.47 34.55 34.83
2 31.83 33.01 34.23 34.72
3 33.07 34.73 35.68 36.02
4 32.86 34.24 35.45 35.95
5 34.12 35.32 36.01 36.43
fixed schemes. These results again support the precedingobjective assessments.
In what follows, we illustrate the performance of theproposed joint rate-control/JSCC approach under the influ-ence of the imposed delay constraint. In Table 2, we repeatedthe same simulation process as in Table 1 for the proposedrate-control/JSCC approach but with varying delay con-straint.
In Table 2, it can be observed that the imposed delayconstraint does play a very important role. As the delayconstraint T becomes looser, the performance of the pro-posed approach improves. For example, for simulation runno. 1, the difference between T = 150 milliseconds andT = ∞ (i.e., no delay constraint) is about 2.5 dB. The rea-son is that as the delay constraint becomes looser, we canfind a larger set of feasible RS codes satisfying the delay con-straint (18). As a result, it is possible to provide stronger FECprotection in the face of packet losses occurring on wire-less links, thus providing improved performance. This tablealso demonstrates that for video applications over wirelessad hoc networks, the delay requirements for video applica-tions always provide a challenging issue for system designand this issue becomes more important for real-time videoapplications in order to obtain a satisfactory end-to-end re-constructed video quality.
6. SUMMARY AND CONCLUSIONS
In this paper, by jointly considering the effective transmis-sion rate constrained by the number of interference neigh-bors and multihop transmissions together with the trans-mission errors occurring on wireless links, we proposed andinvestigated a cross-layer rate-control scheme based on ananalytical study of how the effective transmission rate is af-fected by the network operating parameters. Based on that,we proposed a cross-layer JSCC approach which yields themaximal video quality at the client by considering the net-work conditions, the delay constraint, and the available ef-fective transmission rate. The analytical results demonstratethat it is necessary to incorporate such a rate-control schemeand JSCC approach so that the delivered video quality can bemaximized. Finally, the simulation results demonstrated theeffectiveness of our proposed approach for video communi-cations over wireless ad hoc networks.
REFERENCES
[1] A. Tsirigos and Z. J. Haas, “Multipath routing in the presenceof frequent topology changes,” IEEE Commun. Mag., vol. 39,no. 11, pp. 132–138, 2001.
[2] P. Leelapornchai and T. Stockhammer, “Progressive imagetransmission applying multipath routing in mobile ad-hocnetworks,” in Proc. IEEE International Conference on ImageProcessing (ICIP ’02), vol. 1, pp. 553–556, Rochester, NY, USA,September 2002.
[3] N. Gogate, D.-M. Chung, S. S. Panwar, and Y. Wang, “Sup-porting image and video applications in a multihop radio en-vironment using path diversity and multiple description cod-ing,” IEEE Trans. Circuits Syst. Video Technol., vol. 12, no. 9,pp. 777–792, 2002.
[4] P. Gupta and P. R. Kumar, “The capacity of wireless networks,”IEEE Trans. Inform. Theory, vol. 46, no. 2, pp. 388–404, 2000.
[5] Q. Qu, Y. Pei, and J. W. Modestino, “A motion-based adaptiveunequal error protection approach for real-time video trans-mission over wireless IP networks,” under revision for IEEETrans. Multimedia, 2005.
[6] E. Setton, X. Zhu, and B. Girod, “Congestion-optimizedmulti-path streaming of video over ad-hoc wireless net-works,” in Proc. IEEE International Conference on Multimediaand Expo (ICME ’04), vol. 3, pp. 1619–1622, Taipei, Taiwan,China, June 2004.
[7] Q. Qu, Y. Pei, and J. W. Modestino, “Robust H.264 videocoding and transmission over bursty packet-loss wireless net-works,” in Proc. 58th IEEE Vehicular Technology Conference(VTC ’03), vol. 5, pp. 3395–3399, Orlando, Fla, USA, Octo-ber 2003.
[8] Y. Wang and Q.-F. Zhu, “Error control and concealment forvideo communication: a review,” Proc. IEEE, vol. 86, no. 5,pp. 974–997, 1998.
[9] J. Lu, K. B. Letaief, and M. L. Liou, “Robust video transmis-sion over correlated mobile fading channels,” IEEE Trans. Cir-cuits Syst. Video Technol., vol. 9, no. 5, pp. 737–751, 1999.
[10] S. Mao, S. Lin, S. S. Panwar, and Y. Wang, “Reliable transmis-sion of video over ad-hoc networks using automatic repeat re-quest and multipath transport,” in Proc. 54th IEEE VehicularTechnology Conference (VTC ’01), vol. 2, pp. 615–619, AtlanticCity, NJ, USA, October 2001.
[11] C. E. Perkins, E. M. Royer, S. R. Das, “Ad-Hoc on DemandDistance Vector (AODV) Routing,” IETF Internet Draft,draft-ietf-manet-aodv-12.txt, November 2002.
[12] T. Clausen, P. Jacquet, and A. Laouiti, et al., “OptimizedLink State Routing Protocol,” IETF Internet Draft, draft-ietf-manet-olsr-06.txt, September 2001.
[13] E. Masala, C.-F. Chiasserini, M. Meo, et al., “Real-time trans-mission of H.264 video over 802.11-based wireless ad hoc net-works,” in Proc. Workshop on DSP in Mobile and Vehicular Sys-tems, Nagoya, Japan, April 2003.
[14] V. Parthasarathy, J. W. Modestino, and K. S. Vastola, “Reliabletransmission of high-quality video over ATM networks,” IEEETrans. Image Processing, vol. 8, no. 3, pp. 361–374, 1999.
[15] Y. Pei, J. W. Modestino, Q. Qu, and X. Wang, “Enablingreal-time H.26L video services over wireless ad-hoc net-works using joint admission and transmission power con-trol,” in Visual Communications and Image Processing (VCIP’03), vol. 5150 of Proceedings of SPIE, pp. 1741–1751, Lugano,Switzerland, July 2003.
[16] H. Gharavi and K. Ban, “Cross-layer feedback control forvideo communications via mobile ad-hoc networks,” in Proc.58th IEEE Vehicular Technology Conference (VTC ’03), vol. 5,pp. 2941–2945, Orlando, Fla, USA, October 2003.

756 EURASIP Journal on Wireless Communications and Networking
[17] “Wireless LAN Medium Access Control (MAC) and Physi-cal Layer (PHY) Specifications,” ANSI/IEEE Std. 802.11, 1999Edition.
[18] Y. Yang and R. Kravets, “Distributed QoS guarantees for re-altime traffic in ad hoc networks,” in Proc. 1st Annual IEEECommunications Society Conference on Sensor and Ad-HocCommunications and Networks (SECON ’04), pp. 118–127,Santa Clara, Calif, USA, October 2004.
[19] T. Nguyen and A. Zakhor, “Path diversity with forward er-ror correction (PDF) system for packet switched networks,” inProc. 22nd Annual Joint Conference of the IEEE Computer andCommunications Societies (INFOCOM ’03), vol. 1, pp. 663–672, San Francisco, Calif, USA, April 2003.
[20] E. N. Gilbert, “Capacity of a burst-noise channel,” Bell SystemsTechnical Journal, vol. 39, no. 5, pp. 1253–1265, 1999.
[21] A. C. Begen, Y. Altunbasak, and O. Ergun, “Multi-path se-lection for multiple description encoded video streaming,” inProc. IEEE International Conference on Communications (ICC’03), vol. 3, pp. 1583–1589, Anchorage, Alaska, USA, May2003.
[22] K. Stuhlmuller, N. Farber, M. Link, and B. Girod, “Analysis ofvideo transmission over lossy channels,” IEEE J. Select. AreasCommun., vol. 18, no. 6, pp. 1012–1032, 2000.
[23] S. Ma, W. Gao, and Y. Lu, “Rate-control on JVT Stan-dard,” in Joint Video Team (JVT) of ISO/IEC MPEG & ITU-TVCEG(ISO/IEC JTC1/SC29/WG11 and ITU-T SG16 Q.6) 4thMeeting, Klagenfurt, Austria, July 2002.
[24] P. Gupta and P. R. Kumar, “Critical power for asymptotic con-nectivity in wireless networks,” in Stochastic Analysis, Control,Optimization and Applications, W. H. Fleming, W. M. McE-neany, G. Yin, and Q. Zhang, Eds., pp. 547–566, Birkhauser,Boston, Mass, USA, 1998.
[25] R. de Renesse, M. Ghassemian, V. Friderikos, and A. H. Aghva,“QoS enabled routing in mobile ad hoc networks,” in Proc. 5thIEEE International Conference on 3G Mobile CommunicationTechnologies, pp. 677–681, London, UK, October 2004.
Qi Qu received the B.S.E. degree from theInstitute of Communications and Informa-tion Engineering, University of ElectronicScience and Technology of China, Chengdu,China, in June 2002, and the M.S. de-gree (with honors) from the Department ofElectrical and Computer Engineering, Uni-versity of Miami, Coral Gables, Fla, USA,in May 2004. He is currently working to-ward the Ph.D. degree at the Department ofElectrical & Computer Engineering, University of California, SanDiego, La Jolla, Calif, USA. His research interests are in the areas ofwireless communications, wideband CDMA systems, MIMO sys-tems, and multimedia communication systems and networks.
Yong Pei is currently a tenure-track Assis-tant Professor in the Computer Science andEngineering Department, Wright State Uni-versity, Dayton, Ohio. Previously, he was aVisiting Assistant Professor in the Electricaland Computer Engineering Department,University of Miami, Coral Gables, Fla. Hereceived his B.S. degree in electrical powerengineering from Tsinghua University, Bei-jing, in 1996, and M.S. and Ph.D. degreesin electrical engineering from Rensselaer Polytechnic Institute,
Troy, NY, in 1999 and 2002, respectively. His research interestsinclude information theory, wireless communication systems andnetworks, and image/video compression, and communications. Heis a Member of IEEE and ACM.
James W. Modestino received the B.S. de-gree from Northeastern University, Boston,Mass, in 1962, and the M.S. degree fromthe University of Pennsylvania, Philadel-phia, Pa, in 1964, both in electrical en-gineering. He also received the M.A. andPh.D. degrees from Princeton University,Princeton, NJ, in 1968 and 1969, respec-tively. From 1970 to 1972, he was an Assis-tant Professor in the Department of Electri-cal Engineering, Northeastern University. In 1972, he joined Rens-selaer Polytechnic Institute, Troy, NY, where until leaving in 2001,he was an Institute Professor in the Electrical, Computer and Sys-tems Engineering Department and Director of the Center for ImageProcessing Research. In 2001, he joined the Department of Electri-cal and Computer Engineering, University of Miami, Coral Gables,Fla, as the Victor E. Clarke Endowed Scholar, Professor and Chair.Dr. Modestino is a past Member of the Board of Governors of theIEEE Information Theory Group. He is a past Associate Editor andBook Review Editor for the IEEE Transactions on Information The-ory. In 1984, he was corecipient of the Stephen O. Rice Prize Pa-per Award from the IEEE Communications Society and in 2000 hewas corecipient of the Best Paper Award at the International PacketVideo Conference.
Xusheng Tian received the B.S. degree fromSoutheast University, Nanjing, China, in1991, the M.S. degree from Tsinghua Uni-versity, Beijing, China, in 1994, and thePh.D. degree from Rensselaer PolytechnicInstitute, Troy, NY, in 2002, all in electricalengineering. He is a Visiting Assistant Pro-fessor of electrical and computer engineer-ing at University of Miami, Coral Gables,Fla. Previously, he was the Principal Engi-neer at Premonitia Inc. His research interests include video trans-mission over packet networks, computer communication networkswith a focus on measurement-based network traffic modeling andnetwork management, and resource management of wireless net-works.
Bin Wang received his Ph.D. degree in elec-trical engineering from the Ohio State Uni-versity in 2000. He joined the Departmentof Computer Science & Engineering, theWright State University, Dayton, Ohio, inSeptember 2000, as an Assistant Professor.He spent the summer of 1998 at PanasonicInformation and Networking TechnologyLaboratory, Princeton, NJ. His research in-terests are in communication networks withemphasis on providing quality-of-service assurance in high-speednetworks, DWDM optical networks, wireless and mobile networks,network security, modeling and queuing analysis of systems, sim-ulation optimization, and network protocol development. He isa recipient of US Department of Energy Early Career Award in2003.

EURASIP Journal on Wireless Communications and Networking 2005:5, 757–773c© 2005 Mohammad Hossein Manshaei et al.
An Evaluation of Media-Oriented Rate SelectionAlgorithm for Multimedia Transmission in MANETs
Mohammad Hossein ManshaeiPlanete Project, INRIA, 2004 Route des Lucioles, B.P. 93, 06902 Sophia Antipolis Cedex, FranceEmail: [email protected]
Thierry TurlettiPlanete Project, INRIA, 2004 Route des Lucioles, B.P. 93, 06902 Sophia Antipolis Cedex, FranceEmail: [email protected]
Thomas GuionnetTemics Project, IRISA-INRIA, Campus de Beaulieu, 35042 Rennes Cedex, FranceEmail: [email protected]
Received 15 June 2004
We focus on the optimization of real-time multimedia transmission over 802.11-based ad hoc networks. In particular, we proposea simple and efficient cross-layer mechanism that considers both the channel conditions and characteristics of the media fordynamically selecting the transmission mode. This mechanism called media-oriented rate selection algorithm (MORSA) targetsloss-tolerant applications such as VoD that do not require full reliable transmission. We provide an evaluation of this mechanismfor MANETs using simulations with NS and analyze the video quality obtained with a fine-grain scalable video encoder basedon a motion-compensated spatiotemporal wavelet transform. Our results show that MORSA achieves up to 4 Mbps increase inthroughput and that the routing overhead decreases significantly. Transmission of a sample video flow over an 802.11a wirelesschannel has been evaluated with MORSA. Important improvement is observed in throughput, latency, and jitter while keeping agood level of video quality.
Keywords and phrases: ad hoc networks, cross-layer optimization, IEEE 802.11 wireless LAN, MANETs, mode selection algo-rithms.
1. INTRODUCTION
With recent performance advancements in computer andwireless communications technologies, mobile ad hoc net-works (MANETs) are becoming an integral part of com-munication networks. The emerging widespread use of real-time voice, audio, and video applications generates interest-ing transmission problems to solve over MANETs. Many fac-tors can change the topology of MANETs such as the mo-bility of nodes or the changes of power level. For instance,power control done at the physical (PHY) layer can affect allother nodes in MANETs, by changing the levels of interfer-ence experienced by these nodes and the connectivity of thenetwork, which impacts routing. Therefore, power controlis not confined to the physical layer, and can affect the op-
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
eration of higher-level layers. This can be viewed as an op-portunity for cross-layering design and poses many new andsignificant challenges with respect to wired and traditionalwireless networks. As soon as we want to optimize data trans-mission according to both the characteristics of the data andto the varying channel conditions, a cross-layering approachbecomes necessary. Numerous cross-layer protocols have al-ready been proposed in the literature [1, 2, 3, 4, 5]. They fo-cus on the interactions between the application, transport,network, and link layers. With the recent interest on soft-ware radio designs [6], it becomes possible to make the PHYlayer as flexible as the higher layers. Adaptive and cross-layering interactions can now affect the whole stack of thecommunication protocol. Consequently, the classical OSIapproach of providing a PHY layer as reliable as possibleindependently of the type of data transmitted becomes ques-tionable.
In this paper, we focus on the optimization of real-time multimedia transmission over 802.11-based MANETs.

758 EURASIP Journal on Wireless Communications and Networking
Table 1: Characteristics of the various physical layers in the IEEE 802.11 Standard.
Characteristic 802.11a 802.11b 802.11g
Frequency 5 GHz 2.4 GHz 2.4 GHz
Rate (Mpbs) 6, 9, 12, 18, 24, 36, 48, 54 1, 2, 5.5, 11 1, 2, 5.5, 6, 9, 11, 12, 18, 22, 24, 33, 36, 48, 54
Modulation BPSK, QPSK, 16 QAM, 64 QAM DBPSK, DQPSK, CCK BPSK, DBPSK, QPSK, DQPSK, CCK
(OFDM) (DSSS, IR, and FH) 16 QAM, 64 QAM (OFDM and DSSS)
FEC rate 1/2, 2/3, 3/4 NA 1/2, 2/3, 3/4
Basic rate 6 Mbps 1 or 2 Mbps 1, 2, or 6 Mbps
In particular, we propose a simple and efficient cross-layerprotocol which dynamically adjusts the transmission mode,that is, the physical modulation, rate, and possibly the for-ward error correction (FEC). This protocol called MORSA(media-oriented rate selection algorithm) is convenient forloss-tolerant (LT) applications such as video or audio codecsthat do not require 100% transmission reliability (i.e., a cer-tain level of packet error rate (PER) or bit error rate (BER)can be concealed at the receiver). Contrary to mail and filetransfer applications, several multimedia applications, suchas audio and video conferencing or video on demand (VoD)can tolerate some packet loss. For example, an MPEG videodata flow can contain three different types of packet, in-trapicture (I) frames, prediction (P) frames, and biprediction(B) frames. I-frames are more important for the overall de-coding of the video stream, because they serve as referenceframes for P- and B-frames. Therefore, the loss of an I-framehas a more drastic impact on the quality of the video play-back than the loss of other types of frames. In this respect,the frame loss requirement of I-frames is more stringentthan those of P- and B-frames. Furthermore, as describedin Section 6, some multimedia applications implement theirown error control mechanisms [7, 8], making it inefficient toprovide full reliability at the link layer.
MORSA takes into account both the intrinsic characteris-tics of the application and varying conditions of the channel.It selects the highest possible transmission rate while guar-anteeing a specific bit error rate: the selected transmissionmode varies with time depending on the PER or BER tol-erance and on the signal-to-noise ratio (SNR) measured atthe receiver. We show in this paper that by adaptively select-ing the transmission mode according to both loss-tolerancerequirements of the application and varying channel condi-tions, the application-layer throughput can be significantlyincreased and more stability can be achieved in ad hoc rout-ing. Finally, we evaluate the quality of a sample video trans-mitted over a wireless 802.11a channel using MORSA andcompare it with the quality obtained when we do not takeinto account characteristics of the application (i.e., using thestandard approach). Our results show that MORSA can reacha comparable video quality than the one obtained with thestandard mechanism while using only a very low (5%) FECoverhead at the application level instead of the physical layerFEC (50% or 25%). This significantly decreases transmissiondelay of the application.
Throughout this paper, we assume that wireless stationsuse the enhanced distributed channel access (EDCA), pro-
PLCP header Mac header + payload
Sent with basic rate Sent with the rate indicated in PLCP
Figure 1: Data rates for packet transmission.
posed in the IEEE 802.11e [9] to support different levels ofQoS. We have modified the NS simulation tool to evaluatethe overall system efficiency when considering the interac-tion between layers in the protocol stack.
The rest of this paper is structured as follows. InSection 2, we overview the salient features of the MAC andPHY layers in the 802.11 schemes. We also review some of theautomatic rate selection algorithms that were proposed in theliterature. In Section 3, we present related work about cross-layer protocols in ad hoc networks. The MORSA scheme anda possible implementation within an 802.11 compliant de-vice are discussed in Section 4. Simulation results with NS areanalyzed in Section 5. We evaluate quality of a sample videotransmission over a wireless channel in Section 6. Finally, theconclusion is presented in Section 7.
2. BACKGROUND
Today, three different PHY layers are available for the IEEE802.11 WLAN as shown in Table 1.
The performance of a modulation scheme can be mea-sured by its robustness against path loss, interferences, andfading that cause variations in the received SNR. Such vari-ations also cause variations in the BER, since the higher theSNR, the easier it is to demodulate and decode the receivedbits. Compared to other modulations schemes, BPSK has theminimum probability of bit error for a given SNR. For thisreason, it is used as the basic mode for each PHY layer sinceit has the maximum coverage range among all transmissionmodes. As shown in Figure 1, each packet may be sent withtwo different rates [10]: its PLCP (physical layer convergenceprotocol) header is sent at the basic rate while the rest of thepacket might be sent at a higher rate. The higher rate, used totransmit the physical layer payload, which includes the MACheader, is stored in the PLCP header.
The receiver can verify that the PLCP header is correct(using CRC or Viterbi decoding with parity), and uses thetransmission mode specified in the PLCP header to decodethe MAC header and payload. The mode with the lowestrate is used to transmit the PLCP header. Transmission mode

Evaluation of Media-Oriented Rate Selection Algorithm 759
selection can be performed manually or automatically ineach station. A number of rate selection algorithms have beenproposed in the literature. They include the auto-rate fall-back (ARF) [11], the receiver-based auto-rate (RBAR), [12]and MiSer [13] schemes.RBAR tries to select the best mode(i.e., the mode with the highest rate) based on the receivedSNR, while ARF uses a simple ACK-based mechanism to se-lect the rate. MiSer is a protocol based on the 802.11a/h stan-dards whose goal is to optimize the local power consump-tion. While all these automatic rate selection mechanismstry to adapt the transmission mode according to the channelconditions, we are not aware of any protocol that considerscharacteristics of the application.
Since MORSA is based on RBAR, we detail the latterhere. In RBAR, the sender chooses a data rate based on someheuristic (e.g., the most recent rate that was used to success-fully transmit a packet), and then stores the rate and thepacket size into the request-to-send (RTS) control packet.Stations that receive the RTS can use the rate and packet sizeinformation to calculate the duration of the requested reser-vation. They update their network allocation vectors (NAVs)to reflect the reservation. While receiving the RTS, the re-ceiver uses the current channel state as an estimate of thechannel state when the upcoming packet is supposed to betransmitted. The receiver then selects the appropriate ratewith a simple threshold-based mechanism and includes thisrate (along with the packet size) in a clear-to-send (CTS)control packet. Stations that overhear the CTS calculate theduration of the reservation and update their NAVs accord-ingly. Finally, the sender responds to the CTS by transmittingthe data packet at the rate selected by the receiver. Note thatnodes that cannot hear the CTS can update their NAVs whenthey overhear the actual data packet by decoding a part ofthe MAC header called the reservation subheader. Further in-formation concerning RBAR, including implementation andperformance issues in 802.11b, is available in [12].
3. RELATED WORK
Several cross-layer mechanisms such as mechanisms for TCPover wireless links [1, 5], power control [14], medium ac-cess control [2], QoS providing [15], video streaming overwireless LANs [16], and deployment network access point[1] have been proposed.
The Mobileman European Project [17] introduced insidethe layered architecture the possibility that protocols belong-ing to different layers can cooperate by sharing network sta-tus information while still maintaining separation betweenthe layers in protocol design. The authors propose applyingtriggers to the network status such that it can send signals be-tween layers. In particular, This cross-layering approach ad-dresses the security and cooperation, energy management,and quality-of-service issues.
The effect of such cross-layer mechanisms on the rout-ing protocol, the queuing discipline, the power control al-gorithm, and the medium access control layer performancehave been studied in [2].
0.01
0.001
0.0001
1e − 05
1e − 06
1e − 07
1e − 080 5 10 15 20 25 30 35
BE
R
BER = 0.001
BER = 0.00001
SNR (dB)Change in thresholds
BPSK 6 Mbps
BPSK 9 Mbps
QPSK 12 Mbps
QPSK 18 Mbps
16 QAM 24 Mbps
16 QAM 36 Mbps
64 QAM 48 Mbps
64 QAM 54 Mbps
Figure 2: BER versus SNR for various transmission modes(802.11a).
A cross-layer algorithm using MAC channel reservationcontrol packets at the physical layer is described in [4]. Thismechanism improves the network throughput significantlyfor mobile ad hoc networks because the nodes are able toperform an adaptive selection of a spectrally efficient trans-mission rate.
Reference [16] describes a cross-layer algorithm that em-ploys different error control and adaptation mechanismsimplemented on both application and MAC layers for ro-bust transmission of video. These mechanisms are mediaaccess control (MAC) retransmission strategy, application-layer forward error correction (FEC), bandwidth-adaptivecompression using scalable coding, and adaptive packetiza-tion strategies. Similarly a set of end-to-end application-layertechniques for adaptive video streaming over wireless net-works is proposed in [18]. In [19], the adaptive source ratecontrol (ASRC) scheme is proposed to adjust the source ratebased on the channel conditions, the transport buffer oc-cupancy, and the delay constraints. This cross-layer schemecan work together with hybrid ARQ error control schemesto achieve efficient transmission of real-time video with lowdelay and high reliability. However, none of these algorithmshave tried to adapt the physical layer transmission mode in802.11 WLANs. More examples could be cited, but we arenot aware of any cross-layer algorithm that takes into accountthe physical layer parameters (e.g., PHY FEC) as explained inSection 2.
It should be noted that standardization efforts are inprogress to integrate various architectures. The importantcodesign of the physical, MAC, and higher layers have beentaken into account in some of the latest standards like3G standards (CDMA2000), BRAN HiperLAN2, and 3GPP(high-speed downlink packet access) [1]. IEEE has also con-sidered a cross-layer design in the study group on mobilebroadband wireless access (MBWA).

760 EURASIP Journal on Wireless Communications and Networking
Table 2: SNR (dB) threshold values to select the best transmissionmode.
PHY rateStandard Media-oriented Media-oriented
(with FEC) (no LT) (0.1% LT)
12 Mbps 0.68 6.12 4.94
18 Mbps 4.75 7.37 6.18
36 Mbps 11.39 14.22 13.5
54 Mbps 17.29 21.58 20.3
Table 3: Loss-tolerance classification.
Bits 6-7 Application sensitivity
00 No tolerance in payload
01 Low loss tolerance in payload
10 Medium loss tolerance in payload
11 High loss tolerance in payload
4. CROSS-LAYER MODE SELECTION PROTOCOL
This section describes the MORSA mechanism and discussesimplementation issues.
4.1. Algorithm description
As we already mentioned, real-time multimedia applicationscan be characterized by their tolerance to a certain amountof packet loss or bit errors. These losses can be ignored (ifthey are barely noticeable by human viewers) or compen-sated at the receiver using various error concealment tech-niques. In our scheme, the sender is able to specify its losstolerance (LT) such that the receiver uses both this informa-tion and the current channel conditions to select the appro-priate transmission mode (i.e., rate, modulation, and FEClevel). More precisely, the sender includes the LT informa-tion in each RTS packet to allow the receiver to select the bestmode. The LT information is also included in the header ofeach data packet such that the receiver can decide whetheror not to accept a packet. While receiving the RTS, the re-ceiver uses the information concerning the channel condi-tions along with the information related to LT to select thebest data rate for the corresponding packet. The selected rateis then transmitted along with the packet size in the CTS backto the sender, and the sender uses this rate to send its datapackets. When a packet arrives at the receiver side, if the re-ceiver is able to decode the PLCP header, it can identify theBER tolerance for the encoded payload. If the packet can tol-erate some bit errors, it has to be accepted even if its pay-load contains errors. As will be shown later, our mechanismmakes it possible to define new transmission modes that donot use FEC but that exhibit comparable throughput perfor-mance.
To take into account both the SNR and the LT informa-tion, we have modified the RBAR threshold1 mechanism. For
1These thresholds are used to select the best transmission mode in thereceiver.
802.11a, we assume that the receiver uses FEC Viterbi decod-ing. The upper bound on the probability of error providedin [13, 20] is used under the assumption of binary convo-lutional coding and hard-decision Viterbi decoding. Specifi-cally, for a packet of length L (bytes), the probability of packeterror can be bound by
Pe(L) ≤ 1− (1− Pu)8L
, (1)
where the union bound Pu of the first-event error probabilityis given by
Pu =∞∑
d=dfree
ad · Pd (2)
with dfree the free distance of the convolutional code, ad thetotal number of error events of weight2 d, and Pd the prob-ability that an incorrect path at distance d from the correctpath is chosen by the Viterbi decoder. When hard-decisiondecoding is applied, Pd is given by (3), where ρ is the proba-bility of bit error for the modulation selected in the physicallayer.3
Pd =
d∑k=(d+1)/2
(d
k
)· ρk · (1− ρ)d−k if d is odd,
12·(
dd/2
)· ρd/2 · (1− ρ)d/2 if d is even,
+d∑
k=d/2+1
(d
k
)· ρk · (1− ρ)d−k.
(3)
Figure 2 shows an example of the modifications made forthe SNR threshold in RBAR with and without the media-oriented mechanism. Commonly, a BER at the physical layersmaller than 10−5 is considered acceptable in wireless LANapplications. By using theoretical graphs of BER as functionof the SNR for different transmission modes on a simple ad-ditive white Gaussian noise (AWGN) channel (see Figure 2),we can compute the minimum SNR values required. Now,if a particular application can tolerate some bit errors (e.g., aBER up to the 10−3 as shown in Figure 2), the receiver can se-lect the highest rate for the following data transmission cor-responding to this SNR. For example in Figure 2, when theSNR is equal to 5 dB, the receiver can select a 9 Mbps datarate instead of a 6 Mbps data rate if it is aware that the appli-cation can tolerate a BER less than 10−3.
We have calculated the thresholds using (1), (2), and (3)for an application that can tolerate up to 10−3 BER (seeTable 2). The receiver can use arrays of thresholds that areprecomputed for different LTs.
In the following sections, we describe how such a mech-anism can be implemented in 802.11-based WLANs.
2We have used the ad coefficients provided in [21].3In this paper, we use additive white Gaussian noise (AWGN) channel
model.

Evaluation of Media-Oriented Rate Selection Algorithm 761
Bits 0–3 Bit 4 Bit 5 Bits 6-7 Bits 8–15
Traffic ID Schedule pending ACK policy Reserved TXOP duration
Figure 3: QoS control field in the 802.11e.
Framecontrol
Rate &length
Dest.address
Sourceaddress
Toleranceinformation FCS
Bytes 2 2 6 6 1 4
Figure 4: Modifications to the RTS header.
4.2. Implementation issues
We propose to implement MORSA with the help of theEDCA protocol [22, 23]. EDCA is one of the features that hasbeen proposed by IEEE 802.11e to support QoS in WLANs[9]. In this protocol, each QoS-enhanced station (QSTA) has4 queues to support up to 8 user priorities (UPs). Figure 3shows the QoS control field that is added to the MAC headerin the 802.11e specification [9]. Bits 6 and 7 of this header canbe used to indicate the loss tolerance information. Table 3shows a possible meaning for these two bits in our media-oriented mechanism that should be defined in the processof connection setup. LT information is sent to the receiverby adding one byte to the RTS packets as illustrated inFigure 4.
To make our mechanism operational, it is crucial to letthe packets with corrupted payload reach the receiver’s ap-plication layer. As such, some modifications of the standardare necessary. First, the CRC at the MAC layer should nomore cover the payload but only the MAC, IP, UDP, andpossibly the RTP headers. Second, the optional UDP check-sum must be disabled, as described in the UDP lite pro-posal [24]. UDP lite is a lightweight version of UDP withincreased flexibility in the form of a partial checksum. Thecoverage of the checksum is specified by the sending applica-tion on a per-packet basis. This protocol can be profitablefor MORSA. Furthermore, to make our mechanism morerobust against bit errors, the headers of the different layers(MAC, IP, UDP, and RTP) have to be sent with the basic rate(see Figure 5). This is somewhat similar to the reservationsubheader used in [12] as explained in Section 2. The cor-responding bandwidth overhead is investigated in the nextsection.
5. SIMULATION RESULTS
Our simulations are based on the simulation environmentdescribed in [25] which uses the NS-2 network simulator,with extensions from the CMU Monarch Project [26] to sim-ulate multihop wireless ad hoc networks. In order to obtainmore realistic results, Cisco Aironet 1200 Series parametersare used in our simulations [27]. Further details about thesimulation environment are available in [25].
Note that in the following simulations, CTS and RTScontrol packets and PLCP headers are sent with a BPSK mod-ulation, an FEC rate equal to 1/2, and a 6 Mbps data rate.All throughputs shown in the following figures exclude theMAC and PHY headers; they are denoted as goodputs for theremainder of the paper.
To evaluate the perceived quality for the user using ourprotocol, we have taken an example of video application thatcan tolerate 0.1% of bit errors (see Section 6.2). Thus, wehave investigated the throughput performance of MORSAwhen the BER is equal to 10−3 in the following simulations.Of course other values of the BER can be chosen to performsimulations with similar results.
In our simulation, we assume that bit errors in a packetare distributed according to a binomial distribution. This isan acceptable assumption since the position of the bit errorsare not taken into account by NS-2. In Section 6, we will pro-vide more precise models for the distribution of bit errors inour data stream. Let n represent the number of bit errors in apacket of N bits, and let p be the probability of bit error. Theprobability of having less than L bit errors can be calculatedby
P(n ≤ L) =L∑i=0
(N
i
)· pi · (1− p)N−i. (4)
We first evaluate our mechanism in a simple ad hoc net-work that contains two wireless stations. These wireless sta-tions communicate on a single channel. Station A is fixedand station B moves toward station A. Station B moves in5 m increments over the range of mobility (0 m–200 m) andis held fixed for a 60s transmission of CBR data towards sta-tion A. In each step, 30 000 CBR packets of size 2304 bytes(including physical layer FEC) are sent.
Figure 6 shows the mean goodput of this single CBR con-nection between two wireless stations versus the distance be-tween them for different transmission modes with and with-out media-oriented mechanism.4
Since no payload FEC is used in our media-oriented pro-tocol, the mean goodput is increased significantly comparedto the standard transmission modes. For example, we can ob-serve that the media-oriented mechanism achieves a 4 Mbpsmean goodput improvement at the highest rate mode. How-ever, this has a cost in coverage range: in the same example,it is 50 meters less. It should be noted that if an application
4Based on our simulation study for 802.11a, we have selected five efficienttransmission modes out of the 8 possible transmission modes in 802.11a[25].

762 EURASIP Journal on Wireless Communications and Networking
Framecontrol Duration
Destinationaddress
Sourceaddress BSSID
Sequencecontrol
Qoscontrol
IP, UDP, RTPheader
Payload FCS
Octet:2 2 6 6 6 2 2 44 1− 2304 4
MAC header
Headers are sent by basic mode
(a)
Rate Reserved Length Parity Tail Service
Bits: 4 1 12 1 6 16
Rate is selectedby RBAR at receiver
PLCP header in 802.11a
(b)
Figure 5: Proposed frame format.
18
16
14
12
10
8
6
4
2
0
×103
0 50 100 150 200
BPSK 6 Mbps, FEC = 1/2QPSK 12 Mbps, FEC = 1/2QPSK 18 Mbps, FEC = 3/416 QAM 36 Mbps, FEC = 3/464 QAM 54 Mbps, FEC = 3/4
Mea
ngo
odpu
t(k
bps)
Distance (m)
(a)
25
20
15
10
5
0
×103
0 50 100 150 200
BPSK 6 Mbps (without FEC in payload)QPSK 12 Mbps (without FEC in payload)QPSK 18 Mbps (without FEC in payload)16 QAM 36 Mbps (without FEC in payload)64 QAM 54 Mbps (without FEC in payload)
Mea
ngo
odpu
t(k
bps)
Distance (m)
(b)
Figure 6: (a) Mean goodput versus distance for standard transmission modes and (b) media-oriented with 0.1% bit errors.
can tolerate more bit errors, the coverage range will be largerthan for the standard transmission modes [23].
We have also evaluated the extra bandwidth overhead ofthe modified frame format. This overhead is caused by hav-ing to send the MAC header at the basic mode and by the ad-ditional byte in the RTS packet. Figure 7 compares the meanthroughput for the traditional RBAR and for RBAR with themodified frame format. The worst-case overhead at the max-imum rate is about 1 Mbps, but the coverage range does notchange much compared to the standard specification.
To evaluate the performance of RBAR under differentmode selection mechanisms, we need to calculate arrays of
thresholds for each mechanism (see Section 4). Table 2 showsthese threshold values for RBAR and MORSA.5 These resultsshow that if we can tolerate loss, we will be able to send datawith a higher rate.
Figure 8 illustrates the performance of RBAR andMORSA. Since the standard mode selection mechanismcan achieve the maximum coverage range and the media-oriented mechanism obtains the maximum mean goodput,
5For an SNR smaller than these values, data will be sent with the basic
mode which is 6 Mbps.

Evaluation of Media-Oriented Rate Selection Algorithm 763
18
16
14
12
10
8
6
4
2
0
×103
0 50 100 150 200
Mea
ngo
odpu
t(k
bps)
Distance (m)
RBAR with standard transmission modesRBAR with new data frame format
Figure 7: Overhead of the modified frame format.
25
20
15
10
5
0
×103
0 50 100 150 200
Mea
ngo
odpu
t(k
bps)
Distance (m)
RBAR with standard transmission modesRBAR with media-oriented (MORSA)
Figure 8: RBAR performance for standard and media-orientedprotocols (MORSA).
we have defined a new media-oriented mode selectionmechanism called hybrid transmission mode selection or H-MORSA, to achieve both objectives at the same time (seeFigure 9). The five PHY transmission modes that are usedfor the hybrid mode selection mechanism do not use FEC.
Then, we evaluate the two media-oriented mechanisms(MORSA and H-MORSA) in ad hoc networks. Figure 10shows an example of network configuration for 20 nodeswhich are commonly used for ad hoc network evaluation[12, 26, 28].In our simulation, each ad hoc network con-sists of 20 mobile nodes that are distributed randomly in a1500×300 meter arena. The speed at which nodes move isuniformly distributed between 0.9v and 1.1v, for differentspeeds of v. We use the following speed values 2, 4, 6, 8, and10 m/s. The nodes choose their path randomly according to
25
20
15
10
5
0
×103
0 50 100 150 200
Mea
ngo
odpu
t(k
bps)
Distance (m)
RBAR with the best modes (H-MORSA)BPSK 6 Mbps, FEC = 1/2QPSK 12 Mbps, FEC = 1/2BPSK 6 Mbps (without FEC in payload)QPSK 12 Mbps (without FEC in payload)QPSK 18 Mbps (without FEC in payload)16 QAM 36 Mbps FEC = 3/416 QAM 36 Mbps (without FEC in payload)64 QAM 54 Mbps (without FEC in payload)
Figure 9: RBAR performance using standard or media-orientedprotocol (H-MORSA).
Destination
Source
1500 m
300
m
Figure 10: Example of ad hoc network topology scenario.
a random waypoint mobility pattern. The same movementpatterns are used in all experiments whatever the mean nodespeed. For example, if node A moves from point a to pointb with a speed of 2 m/s, it will take the same route with 4,6, 8, and 10 m/s in the other scenario patterns but with dif-ferent delays. All the results are based on an average over 30simulations with 30 different scenario patterns.
In each simulation, a single UDP connection sends databetween two selected nodes. Other nodes can forward theirpackets in the ad hoc network. The data is generated by aCBR source at saturated rate. In other words, there are al-ways packets to send during the whole simulation time. Un-like in the simple network topology with 2 nodes where weused static routing, here the dynamic source routing (DSR)[28] protocol has been used. DSR is a simple and efficient

764 EURASIP Journal on Wireless Communications and Networking
600
500
400
300
200
100
00 2 4 6 8 10 12 14
Mea
ngo
odpu
t(k
bps)
Mean speed of nodes (m/s)
Media-oriented mode selection (MORSA)(0.1% LT)Hybrid mode selection (H-MORSA)Standard mode selection (RBAR)
Figure 11: Performance comparison for a single CBR connectionin a multihop network, with and without MORSA.
1.4e + 09
1.2e + 09
1e + 09
8e + 08
6e + 08
4e + 08
2e + 08
00 5 10 15 20 25 30
Nu
mbe
rof
deliv
ered
bits
Scenario number
Standard mode selection (RBAR)Hybrid mode selection(H-MORSA)
MORSA with 0.1% LT
Figure 12: Number of delivered bits to the application (speed =2 m/s).
routing protocol designed specifically for use in multihop adhoc networks. It should be noted that routing packets are sentusing the basic transmission mode like the RTS, CTS, andACK control packets.
We use three automatic mode selection mechanisms de-fined in our previous simulations (see Figures 8 and 9). Inthe standard mode selection mechanism (RBAR) and hy-brid mode selection mechanism (H-MORSA), we may havea hop in the route between source and destination that usesa physical FEC equal to 1/2. Thus, we have to use packetswith a payload length equal to 1152 bytes for these simula-tions. However, with MORSA, we are able to send packetswith 2304 bytes since no physical layer FEC is used in thismechanism.
1.6e + 07
1.4e + 07
1.2e + 07
1e + 07
8e + 06
6e + 06
4e + 06
2e + 06
00 2 4 6 8 10 12 14
Nu
mbe
rof
DSR
pack
ets
Mean speed of nodes (m/s)
MORSA with 0.1% LTH-MORSARBAR
Figure 13: DSR routing overhead in multihop network.
6e + 06
5e + 06
4e + 06
3e + 06
2e + 06
1e + 06
00 10 20 30 40 50 60
Mea
ngo
odpu
t(b
ps)
Time (s)
MORSA with 0.1% LTH-MORSARBAR
Figure 14: Performance comparison for a several CBR connectionin multihop network, with and without media-oriented mecha-nism.
Figure 11 shows the mean goodput of a single CBR con-nection versus different mean node speeds. For an applica-tion that can tolerate a BER of 10−3, the mean goodput isabout 25% higher when we take into account the applica-tion’s characteristics.
Figure 12 shows the number of delivered bits for 30 sce-nario patterns6 with mean speed equal to 2 m/s. In the sce-narios where the number of delivered bits is zero, DSR wasnot able to find a route between the source and the destina-tion during the whole simulation time. As expected, in most
6Scenarios are sorted by the number of delivered bits obtained with thestandard mode selection mechanism.

Evaluation of Media-Oriented Rate Selection Algorithm 765
Temporalanalysis
Spatialanalysis
GOF i GOF i+1Spatial
synthesisMotion
estimation
Motioncompensated
predictionGOF i GOF i+1
DFD
Ratecontrol
VMJPEG-2000
VMJPEG-2000
Multiplex
Figure 15: WAVIX structure.
45
40
35
30
25
20
15
100 50 100 150 200 250 300
PSN
R(d
B)
Frame number
StandardMedia-oriented
(a)
16
14
12
10
8
6
4
20 500 1000 1500 2000
Pack
ettr
ansm
issi
onti
me
(ms)
Packet number
StandardMedia-oriented
(b)
2.5
2
1.5
1
0.5
00 500 1000 1500 2000
Jitt
er(m
s)
Packet number
StandardMedia-oriented
(c)
Figure 16: PSNR, transmission delay, and jitter comparison (SNR = −1.6 dB, 6 Mbps, FEC = 1/2, BPSK).

766 EURASIP Journal on Wireless Communications and Networking
45
40
35
30
25
20
15
100 50 100 150 200 250 300
PSN
R(d
B)
Frame number
StandardMedia-oriented
(a)
10
9
8
7
6
5
4
3
2
10 500 1000 1500 2000
Pack
ettr
ansm
issi
onti
me
(ms)
Packet number
StandardMedia-oriented
(b)
45
40
35
30
25
20
15
100 50 100 150 200 250 300
PSN
R(d
B)
Frame number
StandardMedia-oriented
(c)
Figure 17: PSNR, transmission delay, and jitter comparison (SNR = 1.3 dB, 12 Mbps, FEC = 1/2, QPSK).
of the scenario patterns, MORSA can deliver more data bitsto the receiver. One interesting observation is that in somescenario patterns (less than 15% of them), the number of de-livered bits with the standard RBAR and H-MORSA is morethan the one in MORSA. The rationale behind this is thatDSR packets can be sent with the maximum coverage rangein the standard and the hybrid mode selection mechanisms.As a result, the source can find a route to the destinationfaster than MORSA. Thus, the number of delivered packetsin the standard RBAR and the H-MORSA is more than thatof MORSA (e.g., scenario number 20).
We have also evaluated the overhead of the DSR routingprotocol in different cases. The DSR algorithm has two dif-ferent phases called route discovery and route maintenance tomanage the routes in ad hoc networks. In route discovery, adhoc nodes need to find a route between the source and the
destination. This is performed only when the source attemptsto send a packet to the destination and does not already knowa route. In route maintenance, DSR detects changes in thenetwork topology such that the source can no longer use thecurrent route to destination. This can occur if a link alongthe route is not usable anymore.
Figure 13 shows the number of routing overhead packetsgenerated by DSR, which have been sent in ad hoc networksaccording to different mean speed of the nodes. In order toevaluate this overhead, we have considered all DSR routingpackets that should be sent before making a connection andduring data transmission. So this overhead includes route dis-covery and route maintenance overheads. These results showthat routing overhead decreases significantly when we useMORSA. We believe this is a consequence of having morestable connection when MORSA is used.

Evaluation of Media-Oriented Rate Selection Algorithm 767
45
40
35
30
25
20
15
100 50 100 150 200 250 300
PSN
R(d
B)
Frame number
StandardMedia oriented
(a)
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
00 500 1000 1500 2000
Pack
ettr
ansm
issi
onti
me
(ms)
Packet number
StandardMedia-oriented
(b)
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 500 1000 1500 2000
Jitt
er(m
s)
Packet number
StandardMedia-oriented
(c)
Figure 18: PSNR, transmission delay, and jitter comparison (SNR = 8.5 dB, 36 Mbps, FEC = 3/4, 16 QAM).
We have done different simulations to evaluate the per-formance of our mechanism in the presence of interferencefor ad hoc networks. For these simulations, 20 nodes are dis-tributed in an area of 500 × 100 meters which is 9 timessmaller than previous simulation scenarios. In this simu-lation, 6 UDP connections are set up between 12 differentnodes. Data is generated by CBR sources at a saturationrate. The first source starts data transmission at time 3 : 12and the last one at 25 : 12. For this simulation, nodesare fixed and DSR does not need to use route maintenance.The results are averaged over 30 different scenario patterns.Figure 14 shows the performance of MORSA in these ex-periments. Clearly, MORSA outperforms the standard modeselection (RBAR) and hybrid mode selection (H-MORSA)mechanisms. This is because the media-oriented mechanismconsiders the application’s characteristics and does not useFEC at the physical layer when the channel condition isgood.
6. EVALUATION OF VIDEO QUALITY
Simulation results in NS-2 have shown a significant im-provement in throughput when considering the loss require-ments of the application to select the transmission mode. Inthis section, we evaluate the effectiveness of the proposedmedia-oriented mechanism using the simulation of a videotransmission over a 802.11a wireless channel. Our previousobservations about the performance of the media-orientedmechanism can be further justified by the evaluation of thevideo quality obtained at the receiver when we employ themedia-oriented mechanism. In the following sections, we de-scribe a wireless channel model that can estimate the positionand the length of burst error bits in 802.11a. Then, we presenta video application that can tolerate a BER equal to 10−3
by using an application-level FEC whose overhead is only5%. Finally, we compare the transmission delay and thevideo quality (peak signal-to-noise ratio) with standard andmedia-oriented transmission mechanisms.

768 EURASIP Journal on Wireless Communications and Networking
45
40
35
30
25
20
15
100 50 100 150 200 250 300
PSN
R(d
B)
Frame number
StandardMedia-oriented
(a)
3.5
3
2.5
2
1.5
1
0.5
00 500 1000 1500 2000
Pack
ettr
ansm
issi
onti
me
(ms)
Packet number
StandardMedia-oriented
(b)
0.5
0.45
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
00 500 1000 1500 2000
Jitt
er(m
s)
Packet number
StandardMedia-oriented
(c)
Figure 19: PSNR, transmission delay, and jitter comparison (SNR = 17.3 dB, 54 Mbps, FEC = 3/4, 64 QAM).
6.1. 802.11a channel model
Wireless channel models can be divided into two maingroups: memoryless models and models with memory. Inmemoryless models, corrupted bits are produced by a se-quence of independent trials. Each trial has the sameprobability p of producing a correct bit and probability q =1 − p of producing a bit error. However, in a real commu-nication environment, links have memory and errors oftenoccur in isolated bursts because of multipath fading, impul-sive noise, or switch transients. A classic method to modela wireless channel with memory is using a Markov chain. Inthis model, the probability of bit error depends on the state ofthe model. We have considered in this section a model withmemory, which is based on the model proposed in [29] for802.11a WLANs.
In the 802.11a physical layer, the data field will be en-coded with a standard convolutional encoder of different
coding rate R = 1/2, 2/3, or 3/4, depending on the data rate.The 1/2 convolutional encoder uses the generator polyno-mials G0 = 1338 and G1 = 1718 and simple puncturing isapplied to derive higher convolutional rates [30]. Regardingconvolutional decoding, it is usually implemented using theViterbi algorithm.
In this paper, we use the derivation for distributionof error events obtained in these convolutional codes atthe output of the Viterbi decoder. We estimate the posi-tion and the length of bit errors at the output of the de-coder with this method. We use asymptotic bounds to an-alyze the distribution of error event lengths at the outputof the Viterbi decoder. We also consider the relationshipbetween the error probability of a random convolutionalcode and the error probability of a particular block code(termed code termination technique is presented in [31]).The tail of the distribution that is otherwise difficult to es-

Evaluation of Media-Oriented Rate Selection Algorithm 769
36
35.5
35
34.5
34
33.5
33
32.5
320 10 20 30 40 50 60
PSN
R(d
B)
Rate (Mbps)
Figure 20: 95% confidence intervals of PSNR for different trans-mission modes with media-oriented mode selection mechanism.
timate with classical techniques can be estimated with thismethod.
Then, we use the error event length distribution and thedistribution of errorless periods to derive a simple modelwhich describes the residual error at the output of the soft-decision Viterbi decoder. In the next section, we use thismodel to compute the distribution of corrupted bits for dif-ferent transmission modes.
6.2. Video encoder
The concept of fine-grain scalability (FGS) has been in-troduced in order to allow for dynamic rate adaptation tovarying bandwidth and receiver capabilities. Compressionsolutions based on motion-compensated spatiotemporal sig-nal decomposition have thus gained attention as viable al-ternatives to classical predictive techniques for scalable videorepresentation. The video codec that has been used in the ex-periments reported here, referred to as WAVIX in the sequel,has been developed in this framework. Figure 15 shows thestructure of WAVIX video encoder.
A group of frames (GOF) is fed into the coding system. Inorder to fine tune the bit rate allocated to the motion fields,the block-matching motion estimation makes use of a rate-constrained adaptive tree structure. The block size is thusadapted to local motion characteristics in a rate-distortionsense. The rate here refers to the bit rate allocated to encodethe motion vectors and the distortion relates to the predic-tion error. The estimation itself, to save computation time,relies on a hierarchical approach. The motion vectors ob-tained in the first steps of the quadtree are used to initializethe search in the subsequent steps. The motion vectors arethen predictively coded. The predictor is given by the me-dian value of neighboring vectors. The prediction error isthen coded using Huffman codes.
The GOF is fed to the motion-compensated temporaltransform which is based on a two-taps Haar wavelet trans-form. The temporal decomposition is applied iteratively onpairs of images within the GOF. The advantage of the Haarwavelet transform is to achieve a fairly good temporal energycompaction with a limited number of motion fields (8 mo-
tion fields for a 3-stage temporal decomposition of a groupof 8 images).Each temporal subband is then further decom-posed by a biorthogonal 9-7 wavelet filter in the horizontaland vertical direction. In the experiments, 3-levels decompo-sition are being used. The subbands resulting from the spa-tiotemporal decomposition are then quantized with a uni-form quantizer and encoded with a context-based bit-planearithmetic coding as used in the JPEG-2000 standard [32].The algorithm optimizing the truncation points in a rate-distortion sense handles groups of spatiotemporal subbands.The truncation point rate-distortion optimization leading toquality layers is well suited to fine tune the rate allocated tothe texture information, hence to support fine-grain scalabil-ity.
An inter-GOF temporal prediction is also used as an op-tion in the above coding system. The inter-GOF temporalprediction leads to GOFs of type intra and of type inter. Theinter-GOF temporal prediction requires one additional mo-tion field. This temporal prediction and corresponding mo-tion estimation are realized in a closed loop. The closed-loopprediction is done by taking as reference information the cor-responding image coded at a lower rate, as used in a base layerof a scalable representation. A more detailed description ofthis video codec can be found in [33].
Arithmetic codes are widely used in coding systems dueto their high compression efficiency. They are however verysensitive to bit errors. A single bit error may lead to a com-plete desynchronization of the decoder. In order to makethe WAVIX codec robust to errors, an error-resilient arith-metic codes decoding technique [34] has been integrated inthe video decoder. The technique consists in exploiting theresidual redundancy in the bitstream by using soft-decisiondecoding procedures. The term soft here means that the de-coder takes in input and supplies not only binary (hard) de-cisions but also a measure of confidence (a probability) onthe bits. One can thus exploit the so-called excess rate (orsub-optimality of the code), to reduce the catastrophic de-synchronization effect of VLC decoders, hence to reduce theresidual symbol error rates. This amounts to exploiting in-ner codeword redundancy as well as the remaining correla-tion within the sequence of symbols (remaining inter symboldependency).
In practice, the decoding algorithm can be regarded asa soft-input soft-output sequential decoding technique runon a tree. The complexity of the underlying Bayesian esti-mation algorithm growing exponentially with the number ofcoded symbols, a simple, yet efficient, pruning method is in-tegrated. It allows the user to limit the complexity within atractable and a realistic range, at a limited cost in terms ofestimation accuracy.
In order to increase the resynchronization capability, asoft synchronization mechanism has been added. This mech-anism relies on both the use of soft synchronization markersand of forbidden symbols. The soft synchronization mark-ers are patterns, inserted in the symbol stream at someknown positions, which serve as anchors for favoring thelikelihood of correctly synchronized decoding paths. Thissoft synchronization idea augments the auto-synchronization

770 EURASIP Journal on Wireless Communications and Networking
(a) (b)
Figure 21: A sample of video stream at the receiver, (a) transmitted by media-oriented algorithm with 0.1% bit errors (SNR = 1.3, rate =12 Mbps), (b) original video stream.
power of the chain at a controllable loss in information rate.The forbidden symbols, when used, provide additional errordetection and correction capability [35].
The bitstream generated by WAVIX is split into mo-tion vectors and texture. The texture is encoded with theEBCOT algorithm. Hence, it has the same properties as aJPEG-2000 bitstream. The corresponding bitstream is sepa-rated into header and entropy-coded data. The header con-tains high-level information, like GOF sizes, and provides adescription of the structure of the entropy-coded data. Asthis information is essential to the decoder, it is protectedby a Reed-Solomon block code with high redundancy (e.g.,127/255).
6.3. Multimedia transmission over 802.11awireless channel
In this section, we evaluate the quality of the video bitstreamat the receiver side when the media-oriented mechanism isused. In our experiments, the WAVIX video encoder is con-figured to encode a sample of 300 CIF video frames. Thevideo bit rate is 2 Mps and each frame is a YUV image.7 Thenumber of frames in each GOF is 8. The activation of theWAVIX error resilience options corresponds to the additionof a 127/255 Reed-Solomon block code for header protectionand of synchronization markers as explained in Section 6.2.The overhead of the header protection represents about 5.2%of the video stream while the overhead of the synchroniza-tion markers is negligible.
The transmission delay is calculated by considering thenumber of retransmissions and the value of the backoff timer[10]. The retransmission limit is defined in the IEEE 802.11MAC standard specification with the help of the two follow-ing counters: the short retry count (SRC) and the long retry
7The foreman CIF (352× 288 pixels) video sequence has been used.
count (LRC). These counters are incremented and reset in-dependently. The SRC is incremented every time an RTS failsand LRC is incremented when data transmission fails. Boththe SRC and the LRC are reset to 0 after a successful datatransmission. Data frames are discarded when SRC (LRC)reaches dot11ShortRetryLimit (dot11LongRetryLimit). Thedefault values for dot11ShortRetryLimit and dot11Long-RetryLimit are 7 and 4, respectively.
Furthermore, we consider the backoff timer period af-ter each retransmission. For each retransmission, we selecta random backoff which is drawn from a uniform distribu-tion over the interval [0, CW]. In each retransmission, CWis updated to either 2 × (CW +1) − 1 or its maximal valueaCWmax. Let Tbackoff(i) denote the average backoff interval af-ter i consecutive unsuccessful transmission attempts. It canbe calculated by [36]
Tbackoff(i) =
2i(
aCWmin +1)− 1
2· aSlotTime, 0 ≤ i ≤ 6,
aCWmax
2· aSlotTime, i ≥ 6,
(5)
where aCWmin, aCWmax, and aSlotTime are 15, 1023, and9 microseconds for IEEE 802.11a WLANs [30].
We have chosen 4 SNRs corresponding to 4 differenttransmission modes (see Table 2). Using the 802.11a channelmodel described in Section 6.1, we can find the distributionof bit errors for each SNR and transmission mode at the out-put of Viterbi decoder. The bit errors are distributed over thepackets of length 1000 bytes.
In the standard transmission mode, we only accept pack-ets without corrupted bits. The error resilience options of theapplication layer are not employed for the standard trans-mission mechanism. However, we activate the WAVIX errorresilience options and we accept packets with corrupted pay-load for the media-oriented mode selection mechanism.

Evaluation of Media-Oriented Rate Selection Algorithm 771
Table 4: Transmission time comparison for video transmission with and without media-oriented mechanism.
Modulation Data rate (Mbps) FEC rate SNR (dB)Transmission duration Transmission duration
for standard (s) for media-oriented (s)
BPSK 6 1/2 −1.6 8.00 6.92
QPSK 12 1/2 1.3 4.14 3.57
16 QAM 36 3/4 8.5 1.09 0.96
64 QAM 54 3/4 17.3 0.81 0.72
Figures 16, 17, 18, and 19 show the PSNR, transmis-sion delay, and interval jitter performance for 4 transmis-sion modes with both the standard and the media-orientedmechanisms. Table 4 also shows the overall duration of thetransmission for this video stream. As expected, the media-oriented mechanism (with LT = 0.1% and 5.2% FEC over-head at the application layer) significantly decreases the over-all duration of the transmission (see Table 4).
We made the following observations from Figures 16, 17,18, and 19. The packet transmission time is almost fixedwith the media-oriented mechanism while it continuouslychanges with the number of retransmissions using the stan-dard mechanism. When the media-oriented mechanism isused, the PSNR of the decoded video is equivalent to thestandard transmission mode, except for the drops that cor-respond to GOFs where errors occur. In this case, error re-silience options allow us to decode the GOFs with the bestachievable visual quality. The corrupted frames exhibit alower quality, but their visual content is preserved. When thePSNR remains above 30 dB, the degradation is generally un-noticeable for a human viewer. When the PSNR falls as low as25 dB, the decoded frames are severely degraded but are stillacceptable by a human viewer. The impact of errors on thevisual quality depends on the characteristics of the currentframe (in particular, the number and positions of errors, andthe video content). In applications involving real-time con-straints, as for instance visiophony or streaming, it may bepreferable to receive a degraded frame rather than losing itentirely or slowing down the video playback because of pack-ets retransmission.
Another observation from the PSNR calculation is thatafter 4 consecutive retransmissions, (i.e., when a packet islost for good), the standard transmission mechanism can-not decode the rest of the video frame (e.g., this occurs at theframe number 220 in Figure 16). However, this problem canbe solved at the transmitter side with a more intelligent pack-etization scheme, or by adding resynchronization patternswithin the data flow. Nonetheless, in case of packet drop, thevisual content of a full GOF may be lost.
Figures 16, 17, 18, and 19 also show the jitter for the stan-dard and the media-oriented mode selection mechanisms.First, it is obviously and logically correlated to transmissiondelay. In the media-oriented mechanism, the jitter is muchless important than with the standard mode. This is a verydesirable property in the case of video transmission. Havinga constant time interval between packets arrivals is equivalent
to having a constant time slot available to decode each GOF.Therefore, complexity can be managed easily without theneed for excessive buffering.
We have simulated the same scenarios for 10 differ-ent channel characteristics (different distributions of cor-rupted bits over data flow) in order to calculate the confi-dence interval of the PSNR with the media-oriented trans-mission mode. For each transmission rate, the 95% confi-dence intervals on the mean PSNR are computed. The inter-vals for the various rates are displayed by horizontal lines asshown in Figure 20. The results show an acceptable PSNR inall transmission modes. Figure 21 shows a sample of videostream transmitted with the media-oriented algorithm at12 Mbps.
7. CONCLUSION
In this paper, we have presented a novel cross-layer mecha-nism in MANETs to select the best transmission mode whichtakes into account some characteristics of the application.This mechanism, which we believe to be easy to implementin actual devices, uses information from the physical chan-nel and the loss-tolerance requirements of the applicationto select the optimal PHY rate, modulation, and FEC trans-mission parameters. We have proposed new transmissionmodes which do not use FEC and which significantly increasethe application throughput. NS-based simulation results inad hoc networks show that our mechanism achieves up to4 Mbps increase in throughput in MANETs. The gain ob-tained from the application point of view has been evaluatedwith the help of the WAVIX video encoder, which can toler-ate a BER equal to 10−3 with only 5% of FEC overhead at theapplication level. The results show significant improvementsin throughput, latency, and jitter.
ACKNOWLEDGMENTS
The authors wish to thank Marwan Krunz (University ofArizona, USA) for the many helpful discussions on proto-col design during his visit at INRIA. The authors would alsolike to thank Kave Salamatian and Ramin Khalili (Labora-toire d’Information de Paris 6 (LIP6), FRANCE) for theirhelp in channel modeling for 802.11a WLANs. Finally, weare grateful to Christine Guillemot and Mathieu Lacage (IN-RIA, FRANCE) for their critical comments on improving thequality of the paper.

772 EURASIP Journal on Wireless Communications and Networking
REFERENCES
[1] S. Shakkottai, T. S. Rappaport, and P. C. Karlsson, “Cross-layer design for wireless networks,” IEEE Commun. Mag.,vol. 41, no. 10, pp. 74–80, 2003.
[2] S. Toumpis, “Capacity and cross-layer design of wireless AdHoc networks,” Ph.D. thesis, Department of Electrical En-gineering of Stanford University, Stanford, Calif, USA, July,2003.
[3] A. Safwat, H. Hassanein, and H. Mouftah, “Optimal cross-layer designs for energy-efficient wireless Ad Hoc and sen-sor networks,” in Proc. 22nd IEEE International Performance,Computing, and Communications Conference (IPCCC ’03), pp.123–128, Phoenix, Ariz, USA, April 2003.
[4] W. H. Yuen, H.-N. Lee, and T. D. Andersen, “A simple and ef-fective cross layer networking system for mobile Ad Hoc net-works,” in Proc. 13th IEEE International Symposium on Per-sonal, Indoor and Mobile Radio Communications (PIMRC ’02),vol. 4, pp. 1952–1956, Lisbon, Portugal, September 2002.
[5] G. Holland and N. Vaidya, “Analysis of TCP performance overmobile Ad Hoc networks,” Wireless Networks, vol. 8, no. 2, pp.275–288, 2002.
[6] J. Mitola, “The software radio architecture,” IEEE Commun.Mag., vol. 33, no. 5, pp. 26–38, 1995.
[7] H. Jegou and C. Guillemot, “Source multiplexed codes forerror-prone channels,” in Proc. IEEE International Conferenceon Communications (ICC ’03), vol. 5, pp. 3604–3608, Anchor-age, Alaska, USA, May 2003.
[8] T. Guionnet, “Codage robuste par descriptions multiples pourtransmission sans fil d’information multimedia,” Ph.D. thesis,University of Rennes, Rennes Cedex, France, 2003.
[9] IEEE 802.11 WG, “Draft Supplement to STANDARD FORTelecommunications and Information Exchange BetweenSystems-LAN/MAN Specific Requirements - Part 11: Wire-less Medium Access Control (MAC) and Physical Layer (PHY)specifications: Medium Access Control (MAC) Enhancementsfor Quality of Service (QoS),” IEEE 802.11e/Draft 4.2, Febru-ary 2003.
[10] IEEE 802.11 WG, “Wireless LAN Medium Access Control(MAC) and Physical Layer (PHY) specifications,” StandardSpecification, IEEE, 1999.
[11] A. Kamerman and L. Monteban, “WaveLAN-II: a highperfor-mance wireless LAN for the unlicensed band,” Bell Labs Tech-nical Journal, vol. 2, no. 3, pp. 118–133, 1997.
[12] G. Holland, N. H. Vaidya, and P. Bahl, “A rate-adaptive MACprotocol for multi-hop wireless networks,” in Proc. ACM In-ternational Conference on Mobile Computing and Networking(MobiCom ’01), pp. 236–251, Rome, Italy, July 2001.
[13] D. Qiao, S. Choi, A. Jain, and K. G. Shin, “MiSer: an opti-mal low-energy transmission strategy for IEEE 802.11 a/h,”in Proc. ACM International Conference on Mobile Computingand Networking (Mobicom ’03), pp. 161–175, San Diego, Calif,USA, September 2003.
[14] V. Bhuvaneshwar, M. Krunz, and A. Muqattash, “CONSET:a cross-layer power aware protocol for mobile Ad Hoc net-works,” in Proc. IEEE International Conference on Communi-cations (ICC ’04), pp. 4067–4071, Paris, France, June 2004.
[15] U. C. Kozat, I. Koutsopoulos, and L. Tassiulas, “A frame-work for cross-layer design of energy-efficient communica-tion with QoS provisioning in multi-hop wireless networks,”in Proc. 23rd IEEE Annual Joint Conference of Computer andCommunications Societies (INFOCOM ’04), vol. 2, pp. 1446–1456, Hong Kong, China, March 2004.
[16] S. Krishnamachari, M. VanderSchaar, S. Choi, and X. Xu,“Video streaming over wireless LANs: a cross-layer approach,”in Proc. IEEE Packet Video 2003 (PV ’03), Nantes, France, April2003.
[17] M. Conti, G. Maselli, G. Turi, and S. Giordano, “Cross-layering in mobile Ad Hoc network design,” IEEE Computer,vol. 37, no. 2, pp. 48–51, 2004.
[18] Y. Shan and A. Zakhor, “Cross layer techniques for adaptivevideo streaming over wireless networks,” in Proc. IEEE In-ternational Conference on Multimedia and Expo (ICME ’02),vol. 1, pp. 277–280, Lausanne, Switzerland, August 2002.
[19] H. Liu and M. El Zarki, “Adaptive source rate control for real-time wireless video transmission,” Mobile Networks and Ap-plications, vol. 3, no. 1, pp. 49–60, 1998.
[20] M. Pursley and D. Taipale, “Error probabilities for spread-spectrum packet radio with convolutional codes and Viterbidecoding,” IEEE Trans. Commun., vol. 35, no. 1, pp. 1–12,1987.
[21] P. Frenger, “Multi-rate codes and multicarrier modulation forfuture communication system,” Ph.D. thesis, Chalmers Uni-versity of Technology, Goteborg, Sweden, 1999.
[22] Q. Ni, L. Romdhani, and T. Turletti, “A Survey of QoS en-hancements for IEEE 802.11 wireless LAN,” Journal of Wire-less Communication and Mobile Computing, vol. 4, no. 5, pp.547–566, 2004.
[23] M. H. Manshaei, T. Turletti, and M. Krunz, “A media-orientedtransmission mode selection in 802.11 wireless LANs,” inProc. IEEE Wireless Communications and Networking Confer-ence (WCNC ’04), vol. 2, pp. 1228–1233, Atlanta, Ga, USA,March 2004.
[24] L. A. Larzon, M. Degermark, and S. Pink, “UDP lite for realtime applications,” Tech. Rep. 1999-01, HP Laboratories Bris-tol, Bristol, UK, April 1999.
[25] M. H. Manshaei and T. Turletti, “Simulation-based perfor-mance analysis of 802.11a wireless LAN,” in Proc. Interna-tional Symposium on Telecommunications (IST ’03), Isfahan,Iran, August 2003.
[26] “The Rice University Monarch Project, Mobile NetworkingArchitectures,” http://www.monarch.cs.rice.edu/.
[27] “Cisco Aironet 1200 Series Access Point Hardware InstallationGuide,” available in http://www.cisco.com.
[28] D. B. Johnson, D. A. Maltz, and J. Broch, “DSR: the dy-namic source routing protocol for multi-hop wireless AdHoc networks,” in Ad Hoc Networking, C. E. Perkins, Ed.,chapter 5, pp. 139–172, Addison-Wesley, Boston, Mass, USA,2001.
[29] R. Khalili and K. Salamatian, “A new analytic approach toevaluation of packet error rate in wireless networks,” ResearchReport RP-LIP6-2004-10-50, LIP6-CNRS, October 2004.
[30] IEEE 802.11 WGPart 11a, “Wireless LAN medium access con-trol (MAC) and physical Layer (PHY) specifications,” High-speed Physical Layer in the 5 GHz Band, Standard Specifica-tion, IEEE, 1999.
[31] G. D. Forney Jr., “Convolutional codes II. Maximum-likelihood decoding,” Information and Control, vol. 25, no. 3,pp. 222–266, 1974.
[32] D. S. Taubman and M. W. Marcellin, JPEG2000: Fundamen-tals, Standards and Practice, Kluwer Academic, Boston, Mass,USA, 2002.
[33] J. Vieron and C. Guillemot, “Low rate FGS video compres-sion based on motion-compensated spatio-temporal waveletanalysis,” in International Conference on Visual Communica-tion and Image Processing (VCIP ’03), Proc. SPIE, pp. 732–744,Lugano, Switzerland, July 2003.
[34] T. Guionnet and C. Guillemot, “Soft decoding and synchro-nization of arithmetic codes: application to image trans-mission over noisy channels,” IEEE Trans. Image Processing,vol. 12, no. 12, pp. 1599–1609, 2003.
[35] I. Kozintsev, J. Chou, and K. Ramchandran, “Image trans-mission using arithmetic coding based continuous error

Evaluation of Media-Oriented Rate Selection Algorithm 773
detection,” in Proc. Data Compression Conference (DCC ’98),pp. 339–348, Snowbird, Utah, USA, March–April 1998.
[36] D. Qiao and S. Choi, “Goodput enhancement of IEEE 802.11awireless LAN via link adaptation,” in Proc. IEEE InternationalConference on Communications (ICC ’01), vol. 7, pp. 1995–2000, Helsinki , Finland, June 2001.
Mohammad Hossein Manshaei receivedhis B.S. degree in electrical engineeringand his M.S. degree in communication en-gineering from the Isfahan University ofTechnology (IUT), Iran, in 1997 and 2000,respectively. He joined as a Research As-sistant at the Department of Electrical andComputer Engineering in IUT in July 2000.He received another M.S. degree in com-puter science from the University of NiceSophia Antipolis in 2002. He is currently pursuing his Ph.D. degreein computer science in the Planete Group at INRIA Sophia Antipo-lis. His research interests include wireless networking and adaptivecommunication protocols.
Thierry Turletti received the M.S. (1990)and the Ph.D. (1995) degrees in computerscience both from the University of NiceSophia Antipolis, France. During his Ph.D.studies in the RODEO Group at INRIASophia Antipolis, he designed one of thefirst videoconferecening tool for the Inter-net. From 1995 to 1996, he was a Post-doctoral Fellow in the Telemedia, Networks,and Systems Group at Laboratory for Com-puter Science (LCS), Massachusetts Institute of Technology (MIT).He is currently a full-time Researcher in the Planete Group at IN-RIA Sophia Antipolis. His research interests include multimediaapplications, multicast transmission, and wireless networking. Hecurrently serves on the Editorial Board of Wireless Communica-tions and Mobile Computing.
Thomas Guionnet received the B.S. de-gree from the University of Newcastle uponTyne, UK, in computer science, in 1997.He obtained the Engineer degree in com-puter science and image processing and thePh.D. degree from the University of Rennes1, France, respectively, in 1999 and 2003.He was a Research Engineer at INRIA from2003 to 2004 and was involved in the FrenchNational Project RNRT VIP and in theJPEG-2000 Part 11—JPWL Ad Hoc Group. He is currently a Re-search Engineer at Envivio and is involved in the design of high-performance real-time MPEG4-AVC/H.264 encoder. His researchinterests include image processing, coding, and joint source andchannel coding.

EURASIP Journal on Wireless Communications and Networking 2005:5, 774–788c© 2005 Mauri Kuorilehto et al.
A Survey of Application Distributionin Wireless Sensor Networks
Mauri KuorilehtoInstitute of Digital and Computer Systems, Tampere University of Technology, P.O. Box 553, 33101 Tampere, FinlandEmail: [email protected]
Marko HannikainenInstitute of Digital and Computer Systems, Tampere University of Technology, P.O. Box 553, 33101 Tampere, FinlandEmail: [email protected]
Timo D. HamalainenInstitute of Digital and Computer Systems, Tampere University of Technology, P.O. Box 553, 33101 Tampere, FinlandEmail: [email protected]
Received 14 June 2004; Revised 23 March 2005
Wireless sensor networks (WSNs) are deployed to an area of interest to sense phenomena, process sensed data, and take actionsaccordingly. Due to the limited WSN node resources, distributed processing is required for completing application tasks. Propos-als implementing distribution services for WSNs are evolving on different levels of generality. In this paper, these solutions arereviewed in order to determine the current status. According to the review, existing distribution technologies for computer net-works are not applicable for WSNs. Operating systems (OSs) and middleware architectures for WSNs implement separate servicesfor distribution within the existing constraints but an approach providing a complete distributed environment for applications isabsent. In order to implement an efficient and adaptive environment, a middleware should be tightly integrated in the underlyingOS. We recommend a framework in which a middleware distributes the application processing to a WSN so that the applicationlifetime is maximized. OS implements services for application tasks and information gathering as well as control interfaces for themiddleware.
Keywords and phrases: ad hoc networking, distribution, service discovery, task allocation, wireless sensor networks.
1. INTRODUCTION
Wireless sensor networks (WSNs) have gained much atten-tion in both public and research communities because theyare expected to bring the interaction between humans, envi-ronment, and machines to a new paradigm. Despite being afascinating topic with a number of visions of a more intelli-gent world, there still exists a huge gap in the realizations ofWSNs. In this paper, we define WSNs as networks consist-ing of independent, collaborating nodes that can sense, pro-cess, and exchange data as well as act upon the data content.Compared to traditional communication networks, there isno preexisting physical infrastructure that restricts topology.
WSNs are typically ad hoc networks [1] but there are ma-jor conceptual differences. First, WSNs are data-centric with
This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, andreproduction in any medium, provided the original work is properly cited.
an objective to deliver time sensitive data to different destina-tions. Second, a deployed WSN is application-oriented andperforms a specific task. Third, messages should not be sentto individual nodes but to geographical locations or regionsdefined by data content [2].
In WSNs quantitative requirements in terms of latencyand accuracy are strict due to the tight relation to the en-vironment. In general, the capabilities of an individual sen-sor node are limited, but the feasibility of WSN lies on thejoint effort of the nodes. Thus, WSNs are distributed sys-tems and need distribution algorithms. Another motivationfor distribution is the resource sharing. Further, to obtain re-sults, WSN applications typically require collaborative pro-cessing of the nodes sensing different phenomena in diverseareas [2].
The main focus of WSN research, as well as wirelessad-hoc network research in general, has been on differentprotocol layers, reviewed in [2, 3, 4, 5, 6, 7, 8] and on en-ergy efficiency [9, 10]. Recently, issues concerning security,

A Survey of Application Distribution in WSNs 775
context-sensitivity, and self-organization have gained moreattention [11]. Surveys concerning application layer issuesand prototype implementations are fairly limited [4, 12,13]. Furthermore, proposals implementing distribution areemerging as the complexity of applications increases. Theseare covered in [2] but the discussion of proposals supportingapplication distribution is limited to few solutions for distri-bution control.
In this paper, we focus on four essential distribution as-pects in WSNs, namely, service discovery, task allocation, re-mote task communication, and task migration. The service dis-covery comprises of identifying and locating services and re-sources required by a client. In homogeneous WSNs, the ser-vice discovery is not important but when node platforms andthe composition of tasks are heterogeneous, the service dis-covery is essential. The task allocation specifies a set of sensornodes, on which the execution of an application task is acti-vated. The remote task communication covers the means forcommunication between distributed tasks through a wirelesscommunication link. The task migration means the methodsfor transferring a task executable from a sensor node to an-other. The algorithms defining the target nodes for migrationare included in the task allocation.
Algorithms that are tightly bound to an application arenot discussed. The presented distribution aspects are selecteddue to their generality for different types of WSNs and appli-cations. We omit, for example, data fusion and data aggrega-tion that are beneficial only for applications that gather datato a centralized storage.
In this paper we review the application distribution forWSNs focusing on distribution implemented in systems soft-ware. By systems software we mean software componentsproviding application-independent services and managingnode resources. The proposed solutions vary according totools provided, requirements placed on the underlying plat-forms, and targeted applications and environments. How-ever, the current proposals lack an integrated solution pro-viding a distributed operating environment for WSN appli-cations. This approach would lead to a more efficient usageof resources.
This paper is organized in two main parts as follows. Thefirst part describes the basics of objectives, challenges, andsystems software solutions of WSNs. In addition, a summaryof WSN application proposals is presented in order to definerequirements. The second part starting in Section 3 containsthe survey of distribution proposals followed by their analysisin Section 4. Finally, conclusions are given in Section 5.
2. OVERVIEW OF WSNs
In order to give an overview of WSN applications, we reviewsome examples and their characteristics. These are listed inTable 1. The selection is mainly based on prototype imple-mentations and thus all the scopes of WSNs might not berepresented.
The first column in Table 1 lists the applications and thesecond classifies them according to the main task. The thirdcolumn presents the requirements set by the application. The
networking requirements in terms of data amount and fre-quency are defined in the fourth column, while the last col-umn gives the scale and density of the application.
Most of the applications gather, evaluate, or aggregatedata from different types of sensors. Major differences arein networking requirements and complexity. Unfortunately,accurate values or limits to these properties are not often re-ported, which complicates a fair comparison.
The nature of applications listed in Table 1 varies, but atleast four main tasks can be identified [28]. Monitoring isused to continually track a parameter value in a given lo-cation, and event detection recognizes occurrences of events.Object classification attempts to identify an object or its typeand object tracking traces movements of an object.
For the presented applications, the “worst-case” WSNwould comprise of an extensive number of nodes with vary-ing density and a network topology that constantly changesdue to the errors in communication, mobility of nodes, andinactive nodes [3]. To complete complex tasks in the sce-nario, the application requires distributed processing withinthe network.
In our view, WSN application quality of service (QoS) isconstructed from network lifetime, network load, accuracyof data, and fault tolerance. Network load in this case com-prises of the required data latency, throughput, and reliabil-ity. WSN protocols and their functions are adapted accordingto the QoS requirements. Currently, security is a QoS issuethat is often omitted in WSNs. The natural reason is that se-curity requires too much resources [2].
For the rest of the paper we define an environmental mon-itoring application that is used for the analysis of the pro-posed solutions. For clarification, we refer to the applicationas EnvMonitor. The main task of the application is the con-stant gathering of location-dependent information within adefined area. In addition to the passive monitoring involvedin the environmental monitoring applications in Table 1, En-vMonitor consists of active monitoring tasks reacting to con-dition changes in WSN. The passive monitoring data aregathered to a central storage and aggregated during the rout-ing. Active in-network monitoring tasks execute signal pro-cessing algorithms locally in order to determine thresholdvalues for temperature and humidity. When a threshold isreached, a set of predefined actions modifying the applica-tion QoS and the communication topology taken. The mod-ifications alter the requirements for data composition, accu-racy, and latency. The priority of active monitoring tasks pre-cedes passive monitoring.
2.1. Systems software for WSNs
A general-purpose operating system (OS) is an example ofsystems software. Early WSNs have not included systemssoftware due to scarce resources and simplicity of applica-tions. However, complex applications require systems soft-ware because it eases the control of resources and increasesthe predictability of execution. The heterogeneity of plat-forms can be hidden under common interfaces provided bythe software. Still, the major disadvantages are heavy compu-tation and memory usage.

776 EURASIP Journal on Wireless Communications and Networking
Table 1: Examples of prototyped applications for WSNs.
Application Type Requirements Data amount and frequency Scale and density
Great Duck Island[14]
Environmentalmonitoring
Data archiving,Internet access, longlifetime
Minimal, every 5–10 min,2–4 h per day 32 nodes in 1 km2
PODS in Hawaii [15]Environmentalmonitoring
Digital images,energy-efficiency
Large data amounts,infrequently
30–50 nodes in 5hectares
CORIE (ColumbiaRiver) [16]
Environmentalmonitoring Base stations, lifetime
Moderate data amounts,infrequently
18 nodes inColumbia River
Peek value evaluation[17]
Environmentalmonitoring
Collaborativeprocessing, minimalnetwork traffic
Moderate data amounts,periodically
Case dependent
Flood detection [18]Environmentalmonitoring
Current conditionevaluation
50 bytes every 30 s200 nodes 50 mapart
SSIM (artificialretina) [19] Health
Image identification,realtime, complexprocessing
Large data amounts,frequently every 200 ms
100 sensors perretina
Human monitoring[20] Health
Quality of data,security, alerts
Moderate data amounts,depend on the human stresslevel
Several nodes perhuman
Mountain rescue [21] HealthCommunicationintensive
Large data amounts in highfrequency
One per rescuer inmountain area
WINS for military[22]
MilitaryTarget identification,realtime, security,quality of data
Large data amounts,infrequently
Several distantnodes
Object tracking [23] MilitaryCollaborativeprocessing, realtime,location-awareness
Large data amounts with highfrequency near an object
7 (prototype)nodes in proximity
Vehicle tracking [24] MilitaryIdentification andcoordination,realtime
Large data amounts every 8 snear an object
1024 nodes in40 km2
Intelligentinput/output [25] Home entertainment
Communicationintensive
Large data amounts with highfrequency
One node perinput device
WINS conditionmonitoring [22]
Machinery monitoringData aggregation,machinery lifetimeprojection
Depend on machinerycomplexity and its currentstatus
Few nodes permachinery
Smart kindergarten[26] Education
Video streaming,identification,location-awareness
Large data amounts invariable frequencies
Tens of sensors,indoor
Smart classrooms[27] Education
Context-sensing, dataexchange
Large data amounts inrandom frequency
Several nodes inclassroom
The systems software for WSNs implements single nodecontrol and network-level distribution control. The single nodecontrol software implements the low-level routines in a node,whereas the network-level distribution control manages ap-plication execution within several nodes.
Single node controlThe single node control operates on a physical node depictedin Figure 1. A processing unit consists of CPU, storage de-
vices, and an optional memory controller for accessing theinstruction memory of the main CPU. A sensing unit con-sists of sensors and an analog-to-digital converter (ADC). Atransceiver unit enables the communication with other sen-sor nodes. A power unit can be extended by a power genera-tor that harvests energy from environment. Other peripheraldevices, like actuators for moving the node and location find-ing systems, are attached to the node depending on the ap-plication requirements [3].

A Survey of Application Distribution in WSNs 777
Processing unit
Code memory(∼ 128 KB)
Memorycontroller
Data memory(∼ 4 KB)
CPU(∼ 2 MIPS)
Sensing unit
10-bitADC
Sensors
Actuators
Location findingsystem
Power unit
Power generatorTransceiver unit
(< 256 kbps)
Figure 1: Reference hardware platform architecture of a sensornode.
The reference values in Figure 1 are the resources avail-able in MICA2 mote [29]. The power consumption of a nodeis in order of mW when active and in order of µW when thenode is in sleep. The power unit is typically an AA battery orsimilar energy source.
The single node control is accomplished by OS or vir-tual machine (VM). In the reference platform, OS is executedon the main CPU and it uses the same instruction and datamemories as applications. Services implemented by OS in-clude scheduling of tasks, interprocess communication (IPC)between tasks, memory control, and possible power controlin terms of voltage scaling and component activation and in-activation. OS provides interfaces to access and control pe-ripherals. The interfaces are typically associated with layeredsoftware components with more sophisticated functionality,for example a network protocol stack.
Network-level distribution control
Distribution control relies on networking. Figure 2 depictsan example protocol stack for WSN in comparison to twowidely utilized stacks, the OSI model [1] and a distributedsystem in a wireless local area network (WLAN). In a WLANcomputer, the TCP/IP stack is used through a sockets ap-plication programming interface (API). The WLAN adapterthat contains the medium access control (MAC) protocoland the WLAN radio is accessed by a device driver.
There is no unified protocol stack for WSNs and mostof the proposed stacks are just collections of known pro-tocol functions. At the moment, the IEEE 1451.5 Wire-less Sensor Working Group [30] is standardizing the phys-ical layer for WSNs with an intention to adapt link layersfrom other wireless standards, for example, Bluetooth [31],IEEE 802.15.4 low-rate wireless personal area network (LR-WPAN) [32], or IEEE 802.11 WLAN [33]. Other types ofnetworks posing common characteristics with WSNs are mo-bile ad hoc networks (MANETs) [34] targeted to address mo-bility.
In WSNs, the essential protocol layers are the MAC pro-tocol on the data link layer and the routing protocol on thenetwork layer. The MAC protocol creates a network topology
and shares the transmission medium among sensor nodes.The topology in WSNs is either flat, in which all sensor nodesare equal, or clustered, in which communication is controlledby cluster headnodes. The routing protocol allows commu-nication via multihop paths. A transport protocol that im-plements end-to-end flow control is rarely utilized in WSNs.The middleware layer is equivalent to the presentation layerin the OSI model [1].
For WSNs, the development of a distributed environ-ment requires the consideration of all four distribution as-pects. The control actions are taken according to the applica-tion QoS. The distribution aspects are typically implementedon the middleware layer on top of OS. Thus, the middle-ware component can reside in different types of platforms. Inaddition to OS routines, the middleware utilizes networkinginterface to implement communication between its own in-stances on different sensor nodes. Some distribution aspectscan also be implemented directly by OS.
3. SURVEY OF DISTRIBUTION PROPOSALS
Numerous technologies for the service discovery and remotetask communication are available for computer networks.The task migration is typically a transfer of a binary code im-age or a Java applet. In computer networks, the task alloca-tion is often not the main concern as resources are sufficient.Even though not directly applicable for WSNs, the computernetwork technologies define the basic paradigms and algo-rithms for the application distribution.
Other types of wireless ad hoc networks, like MANETsand Bluetooth, have common characteristics with WSNs.First, communication in these networks is very similar toWSNs. Second, the resource constraints must be considered,even though the limits are looser than in WSNs. For thisreason we include technologies proposed for MANETs andBluetooth in our assessment of WSN proposals.
A distinct categorization of proposed solutions for WSNscannot be made since a proposal typically present a morecomplete architecture addressing several distribution as-pects. Therefore, we categorize the proposals according totheir system architecture to OSs, VMs, middlewares, andstand-alone protocols.
3.1. Architectural paradigms
Figure 3 presents three architectural paradigms for distribu-tion, which are client-server, mobile code, and tuple space.In computer networks, the client-server architecture is ap-plied for the service discovery and remote task communi-cation. It consists of one or multiple servers hosting a setof services and clients accessing these. A directory service ismaintained at the server in the service discovery. In the re-mote task communication, a client outsources a task process-ing to a server. Two alternatives are available, remote proce-dure calls (RPCs) and object-oriented remote method invo-cations (RMIs). As the internal data and state of objects areaccessed only through the object interface, RMI achieves bet-ter abstraction and fault tolerance. In addition, objects can becached and moved [35].

778 EURASIP Journal on Wireless Communications and Networking
WSN OSI-model WLAN computer
WSN applicationApplication
layer Application program
MiddlewarePresentation
layer Distributing middleware
Sessionlayer Sockets API
WSN transportprotocol
Transportlayer TCP/UDP
Multi-hoprouting protocol
Networklayer IP
Error controlData link
layer
WLAN adapterdevice driver
WSN MAC protocol WLAN MAC protocol
Transceiver unitPhysical
layerWLAN radio
OS
OS
Figure 2: OSI model, WSN, and distributed system in WLAN protocol layers.
Client
Server
Request data
(a)
Client
Mobile code
(b)
Client
Tuple insertTuple read
Tuple removeRequest dataTuple distribution
(c)
Figure 3: Three architectural paradigms for distribution: (a) client-server, (b) mobile code, and (c) tuple space.
Differences in programming languages and platformsmust be hidden in the remote task communication. Stub pro-cedures are generated for this from interface definitions. Astub procedure at the client marshals a procedure call to anexternal data presentation, which is then unmarshalled backto a primitive form at the server [35].
In the mobile code paradigm, instead of moving datafrom a client to a server for processing, the code is moved tothe data origins, and data are then processed locally. A mo-bile agent is an object that in addition to the code carries itsstate and data. Furthermore, mobile agents make migrationdecisions autonomously. They are typically implemented ontop of VMs for platform independency [36].
The concept of tuple space was proposed originally inLinda [46] for the remote task communication, but it is ap-plicable also for the service discovery. Tuples are collectionsof passive data values. A tuple space is a pool of shared in-formation, where tuples are inserted, removed, or read. Dataare global and persistent in the tuple space and remain un-til explicitly removed. In the tuple space, a task does not
need to know its peer task, tasks do not need to exist si-multaneously, and they do not need to communicate di-rectly.
3.2. Computer networks
Service location protocol (SLP) [47], Jini [48], universal plugand play (UPnP) [49], and secure service discovery service(SDS) [50] implement a client-server architecture servicediscovery in computer networks. The tuple space is utilizedin JavaSpaces [51] on top of Jini and in TSpaces [52]. For theremote task communication, Sun RPC [53] and distributedcomputing environment (DCE) [54] are well-known RPCtechnologies. The best-known object-oriented technologiesare common object request broker architecture (CORBA)[55], Java RMI [56], and Microsoft’s distributed commonobject model (DCOM) [57]. The mobility of terminals isaddressed in Mobile DCE [58], Mobile CORBA [59], andRover Toolkit [60]. Schedulers for computer clusters imple-ment task allocation within a cluster by allocating tasks to themost applicable resources [61].

A Survey of Application Distribution in WSNs 779
Table 2: Implemented distribution aspects in single node proposals.
Proposal Targetnetwork
Resource requirements(CPU/code memory/data memory)
Service discovery Task allocationRemote taskcommuni-cation
Taskmigration
OS-based architectures
EYES OS [37] WSN 1 MHz / 60 KB / 2 KB Resource requests Not supported RPC Not supported
BTnodes [38] WSN 8 MHz/ 128 KB/ 64 KB Tuple space Not supported Callbacks Smoblets
TinyOS [39] WSN 8 MHz/ 128 KB/ 4 KB Not supported Not supported Active messages Not supported
BerthaOS [40] WSN 22 MHz/ 32 KB/ 2,25 KB Not supported Not supported BBS Binary code
MOS [25] WSN 8 MHz/ > 64 KB/ > 1 KB Not supported Not supported Not supported Binary codedownload
QNX [41] LAN 33 MHz/ 100 KB/ N/A Network manager SMP scheduler Message passing Not supported
OSE [42] LAN N/A/ 100 KB/ N/A Hunting service Not supported Phantom process Not supported
VM-based architectures
Sensorware [17] WSN N/A/ 1 MB/ 128 KB Not supportedScript populationspecification
Not supportedTCL scriptmigration
MagnetOS [43] WSN N/A / N/A / N/A Not supportedAutomatic objectplacement
DVM [44]Mobile Javaobjects
Mate [45] WSN 8 MHz/ 128 KB/KB Not supported Not supported Not supportedCode capsuleupdate
Distribution technologies designed for computer net-works are typically both computation and communicationintensive and cannot be implemented on sensor nodes. Theyare based on the client-server architecture and use detailedspecifications for services and interfaces. These technologiesdo not consider the possible mobility or unavailability of sen-sor nodes. While mobility is addressed in Mobile DCE, Mo-bile CORBA, or Rover toolkit, these still rely on the client-server architecture from DCE and CORBA.
3.3. Distribution proposals for WSNs
From systems software proposals for WSNs, OSs and VMsimplement the single node control and middleware archi-tectures implement the network-level distribution control.These can be supported by stand-alone protocols that ad-dress only a single distribution aspect. We contribute theWSN proposals according to distribution aspects they imple-ment.
OS-based architecturesThe distribution aspects implemented in OSs are listed inTable 2. In addition, the second column defines the type ofa network OS is targeted for, while the third one gives OSresource requirements. In WSNs, OSs implement a very lim-ited set of services and they are fairly primitive in their na-ture. As shown in Table 2, the remote task communication isaddressed typically by providing a simple method for RPC.The service discovery is rarely implemented in OS but on ahigher system services layer that is associated to OS. Tasksmigrate as binary code, because OSs do not support code in-terpreting.
The service discovery is implemented in EYES OS [37]on a distributed services layer above the OS by utilizing re-source requests to neighbor nodes. Also Bluetooth smartnodes (BTnodes) [38] implement distribution in system ser-vices above a lightweight OS. BTnodes use the tuple space toimplement the service discovery. The task allocation is notimplemented in any of the proposals.
A client-server type RPC is applied to the remote taskcommunication in TinyOS [39], BerthaOS (for Pushpinnodes) [40], and in EYES OS. In the component-basedTinyOS, the handler name of the remote component and re-quired parameters are encapsulated in a TinyOS active mes-sage. BerthaOS uses bulletin board system (BBS) for IPC andnodes can post messages also to BBS of a neighbor node. InEYES OS, the basic RPC between neighbor nodes is applied.BTnodes use the tuple space also for information sharing andfor sending notifications to callbacks routines.
The task migration as binary code is possible in BetrhaOSand in MultimodAI NeTworks of In-situ Sensors (MANTIS)OS (MOS) [25]. BerthaOS allows the in-network initiation oftransfers and checks the code integrity using a simple check-sum, but neither it nor MOS considers the vulnerability ofthe system to malicious code. In BTnodes, precompiled Javaclasses, smoblets, are able to migrate but they must be exe-cuted on more powerful platforms.
Embedded OSs and RealTime OSs (RTOS), like QNX[41] and OSE [42], support service discovery and remotetask communication in OS services. In QNX, the networkof computers is abstracted to a single homogenous set of re-sources. QNX uses message passing to implement IPC andhides remote locations in process and resource managers.

780 EURASIP Journal on Wireless Communications and Networking
The local managers interact with a network manager thathandles name resolution. OSE uses stub procedures, referredto as phantom processes, for the remote task communica-tion. A phantom process uses a link handler to communi-cate with the peer phantom process on the remote node. Theremote node is discovered by a hunting system service thatbroadcasts service requests to the network.
From these proposals, QNX and OSE offer a distributedenvironment for applications, but they require more efficientsensor node platforms. Their resource requirements shownin Table 2 do not contain all the components required forthe implementation of the distributed environment. The re-source requirements set by other OSs are in the same order ofmagnitude. All the proposed OS architectures implement thesingle node control over the application tasks of EnvMonitor.The most applicable environment for EnvMonitor is availablein BTnodes, where the tuple space implements service dis-covery and callbacks and smoblets support in-network dis-tributed processing.
VM-based architectures
Compared to OSs, VMs offer hardware platform indepen-dency and substitute the lack of hardware protection by theprotection implemented in code interpreters. The distribu-tion aspects, target network, and required resources of VMarchitectures are categorized in Table 2. As shown, the mobilecode is a common approach to distribution, whereas servicediscovery is not supported.
The task allocation is supported by Sensorware [17] andMagnetOS [43]. The population of tool command language(TCL) scripts in Sensorware is specified in the scripts them-selves. MagnetOS utilizes automatic object placements algo-rithms that adaptively attempt to minimize communicationby moving Java objects nearer to the data source. The remotetask communication is addressed only in MagnetOS that re-lies on distributed VM (DVM) [44]. DVM abstracts networkof computers to a single Java VM (JVM).
As depicted in Table 2, the mobile code is a TCL scriptin Sensorware, a custom bytecode capsule in Mate [45], anda Java object in MagnetOS. The size of the TCL scripts andespecially the Mate code capsules is small compared to thesize of Java objects. In Mate that operates on top of TinyOSa new code capsule is sent in TinyOS active messages to allnodes.
From the proposed solutions, Sensorware and Magne-tOS implement task migration and task allocation, whereasin Mate only the latest code version is updated to all nodes.Implementation of MagnetOS on sensor nodes is not pos-sible, Sensorware sets considerable requirements for under-lying platforms, and Mate is implemented to very resourceconstrained nodes.
Like OSs, these proposals implement the single node con-trol for EnvMonitor. From these proposals, Sensorware is themost suitable for EnvMonitor due to its migration, alloca-tion, and task coprocessing capabilities. However, the con-trol for these actions must be implemented by the applicationscripts.
Middleware architectures
Middleware architectures implement a higher abstractionlevel environment for applications. Generally, three differ-ent approaches in WSN middlewares can be identified. First,a middleware coordinates the task allocation based on theapplication QoS. Second, WSN is abstracted to a databasethat supports query processing. Third, a middleware controlsapplication processing in the network based on the currentcontext of surrounding environment. The context dependson the location, nearby people, hosts, and devices, and thechanges in these over time [62]. The target network and dis-tribution aspects for proposals are listed in Table 3.
Application QoS is applied for controlling the task alloca-tion in the configuration adaptation of the middleware link-ing applications and networks (MiLAN) [20], in the resourcemanagement of the cluster-based middleware architecturefor WSNs [63], and in QoSProxies of the QoS-aware middle-ware for ubiquitous and heterogeneous environments [64].The cluster-based middleware and MiLAN adapt also thenetwork topology. The QoSProxy selects an application con-figuration matching available resources and makes resourcesreservations to guarantee the specified QoS for that configu-ration. Both MiLAN and QoS-aware middleware adopt ser-vice discovery protocols from computer network solutions.QoS-aware middleware requires a more powerful platformthan the other two.
A database approach is taken in sensor information andnetworking architecture (SINA) [24], in TinyDB [65] on topof TinyOS, and in Cougar [66]. In SINA, database queriesare injected to network as sensor querying and tasking lan-guage (SQTL) [71] scripts. These scripts migrate from nodeto node depending on their parameters. The task allocationin SINA is implemented by a sensor execution environment(SEE), which compares SQTL script parameters to node at-tributes and executes script only if these match. In TinyDBand Cougar, the task allocation is implemented by a queryoptimizer that determines energy-efficient query routes. Thequery plans generated by the query optimizer are parsed inthe nodes and then executed accordingly. TinyDB supportsalso event-based queries that are initiated in-network on theoccurrence of an event.
Application adaptation based on the current contextis performed by Linda in a mobile environment (LIME)[67], mobile agent runtime environment (MARE) [21], andreconfigurable context-sensitive middleware (RCSM) [27].Service discovery is implemented by the tuple space in LIMEand MARE. RCSM uses a custom RKS [68] protocol that re-duces communication by advertising services only if they canbe activated in the current context and potential clients arein the vicinity. LIME implements task allocation by reactionsadded to tuples. The MARE control manages nearby mobileagents and allocates tasks to the agents. RCSM ADaptive ob-ject containers (ADC) activate tasks in an appropriate con-text.
The tuple space in LIME and MARE is used also for theremote task communication. LIME supports also location-dependent recipient identification. RCSM utilizes RCSM

A Survey of Application Distribution in WSNs 781
Table 3: Implemented distribution aspects in middleware and stand-alone protocol proposals.
Proposal Target network Service discovery Task allocationRemote taskcommunication
Task migration
Middleware architectures
MiLAN [20] WSNSLP, BluetoothSDP
Configurationadaptation
Not supported Not supported
Cluster-basedmiddleware [63]
WSN Not supportedResourcemanagement
Not supported Not supported
QoS-awaremiddleware [64] MANET SLP/Jini/SDS QoSProxy Not supported Not supported
SINA [24] WSN Not supported Attribute matchingin SEE
Not supported SQTL scripts
TinyDB [69] WSN Not supportedQuery optimizer,event-based queries
Not supported Not supported
Cougar [66] WSN Not supported Query optimizer Not supported Not supported
LIME [67] MANET Tuple space Context reaction Tuple space Mobile Java objects
MARE [21] MANET Tuple space MARE control Tuple space Mobile Java objects
RCSM [27] MANET RKS [68] Adaptive objectcontainers
R-ORB Not supported
Stand-alone protocols
GSD [69] MANET Service groups Not supported Not supported Not supported
Bluetooth SDP [31] Bluetooth Clients and servers Not supported Not supported Not supported
Task migration in [70] WSN Not supported Not supported Not supported Edit scripts
context-sensitive object request broker (R-ORB) that adaptsbasics from CORBA ORB. Both LIME and MARE utilize mo-bile agents implemented as Java objects for the task migra-tion.
Unlike OSs and VMs, most of the middleware architec-tures implement the network-level distribution control butdo not address the single node control. Middlewares rely-ing on the application QoS specification address mainly taskallocation, but leave other aspects to external components.The database abstraction is applicable to a certain type of ap-plications, like EnvMonitor, but the expressivity of the SQTLscripts in SINA, the event-based queries in TinyDB, and es-pecially the query processing capabilities in Cougar do notsupport complex in-network processing. As can be seen fromTable 3, context-aware proposals cover distribution aspectsextensively. They implement extensive environment for En-vMonitor but their resource requirements are too high forsensor nodes.
Stand-alone protocols
The environment provided by OSs, VMs, or middlewarearchitectures can be supported by stand-alone protocolsimplementing dedicated functions. We do not cover WSNMAC and routing protocols but focus on protocols that im-plement any of the four distribution aspects. The protocolsand their target networks are listed in Table 3.
The group-based service discovery protocol (GSD) forMANETs [69] and the Bluetooth service discovery protocol(SDP) [31] implement the service discovery. In GSD, termi-
nals advertise their services and nearby service groups withinthe distance of n hops. Service requests are forwarded to-wards the service provider based on group advertisements. ABluetooth terminal maintains information about its servicesin an SDP server. Searching and querying for existing servicesare performed by an SDP client that queries one server at atime.
An approach for minimizing the transferred binary codesize on the task migration is proposed in [70]. The proposaltransmits only the differences between the existing and thenew code. The algorithm is adopted from the diff commandof UNIX.
These protocols can be used as separate components forEnvMonitor, but none of them provides a complete environ-ment. GSD is communication intensive due to the multi-hopadvertisements. Bluetooth SDP does not support broadcastqueries, which restricts its applicability in large WSNs. Thetask migration proposed in [70] cannot be initiated in WSNsdue to the complexity of the algorithm and the lack of in-tegrity checking.
4. ANALYSIS OF PROPOSALS
A comprehensive comparison of the proposals is problematicdue to the diversity of platforms, applications, and imple-mentations. However, the requirements for each distributionaspect are similar, which makes their assessment possible. Inthe analysis, we concentrate on the proposals targeted forWSNs.

782 EURASIP Journal on Wireless Communications and Networking
Table 4: System testing and validation environments for distribution proposals.
Proposal Test environmentSimulation andtesting tools
Prototypeplatform
Result accuracy Published results
OS-based architectures
TinyOS [39] Prototype TOSSIM [72] Motes AccurateComponent sizes, OS routinedelays, computation costs
BerthaOS [40] Prototype None Pushpin None Functionality mentioned
EYES OS [37] None None None None None
MOS [25] Prototype PC emulatorXMOS [25]
Nymph ModerateMemory and power consumption,test application performance results
BTnodes [38] Prototype NoneMicro-sizeBTnodes
ModerateComponent sizes, energyconsumption
VM-based architectures
Sensorware [17] Prototype SensorSim [73] Linux IPAQ AccurateFramework size, execution delays,energy consumption
MagnetOS [43]Windows/LinuxJVM
Custom packet-level simulator
PC NoneInternal algorithm comparisonin simulator
Mate [45] Prototype TOSSIM [72] TinyOS mote AccurateBytecode overhead, installationcosts, code infection performance
Middleware architectures
MiLAN [20] None None None None None
Cluster-basedmiddleware in [63]
Algorithmsimulation
Customsimulator
None NoneHeuristic resource allocation,algorithm performance
Qos-awaremiddleware in [64] None None None None None
SINA [24] Simulations GloMoSim [74] None PoorSINA networking overhead,application performance
TinyDB [65]Simulations,prototype
Custom en-vironment
TinyOS mote AccurateQuery routing performance insimulations, sample accuracy andsampling frequency in prototypes
Cougar [66] None None None None None
LIME [67] JVM None PC Poor Approximations about Java code size
MARE [21] JVM None PDA Poor Service discovery performance
RCSM [27] Prototype NonePDA with customhardware
RCSM poor,RKS accurate
RCSM memory consumption,RKS size, communication,energy consumption
Stand-alone protocols
GSD [69] Simulations GloMoSim [74] None PoorInfluence of internal parameterson service discoverability
Task migrationin [70]
PC NoneTested in EYESnodes
AccurateAlgorithm performance,influence of internal parameters
4.1. Testing and validation of WSN proposals
Discussed WSN architectures vary in their complexity andrequirements. In order to provide a scope for the assessmentof proposals, their testing and validation environments arepresented in Table 4. The test environment is presented in thesecond column. The simulation and testing tools and proto-type platforms identify the proposal validation tools and testplatform. The published results and their accuracies are listedin the last two columns.
Generally, prototypes exist for the single node architec-tures and their results are accurate including informationrequired for comparison. Instead, on the middleware layer,proposals are evaluated by simulations or not at all. Thesimulation results are inaccurate as they compare only theinternal algorithms and do not give any information fora general comparison. Of course, exceptions exist in bothcases.
Even though some of the presented results in Table 4 areaccurate and their scope is adequate, the direct comparison

A Survey of Application Distribution in WSNs 783
Table 5: Characteristics of technologies implementing service discovery.
Technology Communication Scalability Fault tolerance Requirements Benefits (pros) Problems (cons)
Resourcerequests
Requeststo neighbors
Restrictedto neighbors
Broadcastedto all neighbors
Resourcedeclaration
One-hopcommunication
Scalability
Tuple space Tuple operations Balancing betweenmemory and scale
Redundantinformation
Memory pool ineach node
Source and targetindependency
Communication/memory load
Networkmanager
Name resolution re-quests to manager
Local manager area,but extensible
Possibly redundantnetwork managers
Resource managers,register to manager
Scalability due tonaming
Name resolution,communicationload
Huntingservice
Broadcast hunt ser-vice requests
Not restricted Lost services can berehunted
Remote serviceidentification
Lightweight afterinitiation
First hunt latencyand communica-tion load
BluetoothSDP
Peer-to-peer link Only nearby nodesone at a time
Service informationonly in the host
Bluetooth protocolstack
Querying foravailable services
Scalability, nobroadcast
RKSAdvertises for po-tential clients
Only to nearby clients Advertisementswhen context andclients applicable
Context definitionsfor services
Advertisements Scalability
GSD servicegroups
Service and groupadvertisements
n-hop diameter, butgroups span wider
Redundantinformation
Service registration Request routingbased on groupadvertisements
Communicationload (both ad-vertisements andrequests used)
of distribution performance is not possible. The prototypeplatforms vary in their efficiency, the simulators in their ac-curacy, and the test applications in their requirements andfunctionality. As the area is evolving rapidly, generally ac-cepted benchmarks would ease the comparison of the pro-posals. However, the definition of general-enough bench-marks for WSNs is difficult due to their application-specificnature.
4.2. Comparison of technologies
We classify the technologies for each distribution aspect sep-arately. The classification dimensions for a technology arecommunication mechanism, scalability to large WSNs, faulttolerance, and requirements that must be met before the tech-nology can be used. For each technology, we also assess itspros and cons in general. These dimensions offer tools forthe evaluation of the robustness and applicability of a tech-nology for different kinds of WSNs and applications.
Service discovery
The classification of the service discovery technologies in theproposals according to the defined dimensions is presentedin Table 5. From the presented solutions, all but the tuplespace and GSD rely on client-server architecture. Still, thenetwork manager is the only centralized server. In general,two problems can be identified from the proposals. They ei-ther have a restricted scalability or require intensive commu-nication.
The client-server technologies that are limited to nearbynodes do not scale to large WSNs. GSD and the tuple spaceboth scale to large networks but they require more commu-nication for locating a service. However, in both technolo-gies the communication load can be decreased by increasingthe number of hops, to which the service information is dis-tributed. This increases the communication during the ini-
tiation but reduces it during the discovery, with the cost ofincreased memory consumption.
Task allocationThe technologies that implement a mechanism for the taskallocation and the characteristics of each technology arelisted in Table 6. As peer-to-peer communication is notneeded in all the technologies, the communication mecha-nism is replaced by a more general outlining of the taken ap-proach. As shown in Table 6, the variance of technologies isgreater than in the service discovery. As most of the technolo-gies are middleware layer implementations, the main reasonfor the variance is the three different approaches taken at thatlayer.
The most promising approach is the task allocation basedon application QoS. It does not restrict the implementa-tion of tasks nor rely on the surrounding context. Instead,it enables the adaptation of application operations depend-ing on the current application requirements. The applicationrequirements can be adjusted depending on the output ofthe application itself, which makes the technologies adaptiveto changing conditions. Generally, application-QoS-basedtechnologies require a central control for the task allocation,but a distributed control lacks similar adaptability.
Remote task communicationFrom the remote task communication technologies classifiedin Table 7, most utilize traditional RPC or RMI that are tai-lored for resource constrained environments. The tuple spaceand callbacks, which also utilize tuple space, are the only ex-ceptions.
In general, the technologies either are restricted in theirscalability or burden memory and communication resources.The problem in RPC and RMI technologies is the require-ment for a client to know the server. In the tuple space andcallbacks this is not required. In the callbacks, the message

784 EURASIP Journal on Wireless Communications and Networking
Table 6: Characteristics of technologies implementing task allocation.
Technology Approach Scalability Fault tolerance Requirements Benefits (pros) Problems (cons)
SMPscheduler
Scheduling of tasksto free resources
Not restricted Redundant High-speed bus,shared memory
Efficiency andtransparency
Inapplicablerequirements
Script popu-lationspecification
Specification in mi-grating scripts
Not restricted Multiple copiesin network
Control in appli-cation scripts
No controlrequired
Expressivity ofspecification
Automaticobjectplacement
Activating and mov-ing objects near tosource
Not restricted Multiple agentsavailable
Object placementalgorithms
Reduced datacommunication
Complexity
Configurationadaptation
Mapping tasks toavailable resources
Not restricted Changes activenodes adaptively
Feasibility analy-sis,state updates
Application QoSconsideration
Controlcommunication
Resourcemanagement
Heuristic algorithmbalancing load [75]
Restricted toa cluster
Continuousallocation
Control messages Network lifetimemaximizing
Algorithmcomplexity
QoSProxy
Component andservice adaptationfor resources andapplication QoS
Network-wide insmall networks
Adaptation accord-ing to conditions
Application QoSspecification
QoS adaptationdynamically toavailable resources
Server required,complexity andcommunication
Attributematching inSEE
Matching script at-tributes to node pa-rameters locally
Not restricted Multiple copiesin network
Accurate attributespecifications
Local late binding Restrictedexpressivity
Queryoptimizer
Optimizing queryrouting to network
Optimization ingateway node
Redundancyin queries
Disseminatedquery plans
Only requiredset of nodesactivated
Networking loadof query plans
Event-basedqueries
Initiate query on oc-currence of event
Not restricted Possibly severalevent detectors
Event identifica-tioncapability
In-networkreaction
Loading of eventsource node
Contextreaction
Reactions on tuplesand executed onmatching context
Reaction restrictedto a location
Redundancy in tu-ple space
Locationidentifying
Task executed onlywhen its context isapplicable
Scalability
MAREcontrol
Nearby agents forman executionenvironment
Restricted to nearbyagents
Possibleredundancy
Agent managerscontrolling agents
Agent cooperationin complex tasks
Scalability
Adaptiveobjectcontainers
ADC activates tasksin correct context
Not restricted Possibleredundancy
Context interfacespecifications
Only applicabletasks activated
Complex contextspecifications
is sent to a registered callback function whenever the valueof a tuple changes. The tuple space does not support suchinterests on tuples. Like in the service discovery, the com-munication and memory load of the tuple space are ad-justable.
Task migration
The technologies for the task migration are summarized inTable 8. Most of the technologies rely on the mobile agentsdue to their fault tolerance and smaller physical size. Threetechnologies rely on binary code in order to lessen the com-putation load caused by the agent interpreting.
In order to use binary code in the task migration, thepossible errors during transfers and malicious attacks mustbe managed. The edit script generation algorithm is toocomplex to be executed in nodes, thus making it inappli-cable for dynamic WSNs. From the VM approaches, theTCL and SQTL scripts and Mate bytecode capsules are morelightweight than Java objects because of the complexity andmemory requirements of JVM.
4.3. Suitability assessment
Generally, the OS and VM proposals support the remotetask communication and the task migration but leave thetask allocation and the service discovery to an applicationor other external components. On the contrary, middlewareapproaches concentrate on implementing the task allocation,leaving other aspects for the tuple spaces or some legacy pro-tocols. MARE and LIME are the only proposals that cover alldistribution aspects. However, the utilization of JVM and thedistributed tuple space requires resources that are not gener-ally available in current WSN platforms.
We assess the applicability of the proposals for En-vMonitor. For a fair comparison, we separately comparethe approaches for node platforms with enough resources,and then for platforms with limited resources defined inFigure 1. The main aspect considered in the assessment is thecompleteness of the operating environment provided for theapplication. In a complete environment, the application doesnot need to consider its distributed nature but the distribu-tion is handled by the systems software. Further, the adap-

A Survey of Application Distribution in WSNs 785
Table 7: Characteristics of technologies implementing remote task communication.
Technology Communicationimplementation Scalability Fault tolerance Requirements Benefits (pros) Problems (cons)
Activemessages
Remote handler,data encapsulation
Not restricted N/A Awareness ofremote handler
Mapping toTinyOS eventmodel
Handler name inASCII
BBS Message posting toneighbor BBS
Restricted to neigh-bor nodes
Message posted toall neighbors
Neighbor postingenabled by sender
One-hopcommunication
Scalability,memory load
EYES OS RPC N/A Restricted toneighbors
N/A N/A One-hopcommunication
Scalability
Callbacks Callback registeredto a tuple
Restricted to nodessharing tuple space
Callback registeredonly in one node
Shared tuple spacebetween nodes
Callback fired onlyon an event
Fault tolerance
Messagepassing
Custom networking(QNet) operations
Not restricted Possibility forredundantmessages
Name resolution Mapping to localIPC
Network namingoverhead
Phantomprocess
Messages sent bylink handler
Not restricted Possible securechannels
Created channel forcommunication
Mapping to localIPC
Required hand-shaking,communicationload
DVM Invocationredirection
Not restricted N/A Compile time scriptmodification
Seamless IPC be-tween objects
Communicationand processingload
Tuple space Tuple operations Not restricted Redundant Shared tuple spacebetween nodes
Distributed inspace and time
Communication/memory load
R-ORB Message-orientedcommunication
Requires nearbyrecipient
Activated when linkavailable
Context sensing Activated only inapplicable context
Scalability
Table 8: Characteristics of technologies implementing task migration.
Technology Communication Scalability Fault tolerance Requirements Benefits (pros) Problems (cons)
Binary code Binary code afternegotiation
Only to one neigh-bor at a time
Simplechecksum
Initiated by the binarycode itself
Runtime initiation Scalability, bit er-rors, binary size
Binary codedownload
Binary code fromworkstation
No in-networkinitiation
No protection User initiatesdownloads
Possibility to updateOS components
Errors, binary size,user interaction
Smoblets Java applet modules Execution only inlaptops/PDAs
Java interpreterprotection
Efficient platforms Complex processingoutsourcing
Executed only inefficient nodes
TCL scriptmigration
TCL scripts The scale specifiedin scripts
TCL interpreterprotection
Injected to networkby a user
Dynamic migration,small size of scripts
Complex popula-tion specifications
Mobile Javaobjects
Objects on topof JVM
Not restricted Interpreterprotection
Event initiatingmobilization
Scalability Communicationand processingload
Code capsuleupdates
Small capsules in oneactive message
Script populatedto all nodes innetwork
Mate interpreterprotection
Injected to networkby a user
Small size of scripts No controlledmigration
SQTL scripts Custom query scripts The scale specifiedin scripts
SEE interpreterprotection
Injected to networkby a user
Small size of scripts Communicationcost in broadcast
Edit scripts Scripts containingchanges to old code
No in-networkinitiation
Erroneous/missingscripts requestedfrom neighbors
Generation of editscripts in workstation
Small size of scripts Complexity, no in-network operation
tivity of the proposals to changing conditions and the taskallocation for extending network lifetime are emphasized.
For resource rich environments, MARE is the most suit-able environment. The sensing and aggregation tasks in Env-Monitor can be allocated by the MARE control, and the activemonitoring tasks can be implemented as mobile agents thatare activated on demand.
For typical WSN platforms, MARE is not applicabledue to its resource requirements. On the other hand, BTn-odes fit to the restricted resources. The callbacks can beused to implement active monitoring tasks in EnvMoni-tor. The only aspect that is not supported by BTnodes isthe task allocation so that the load is balanced betweennodes.

786 EURASIP Journal on Wireless Communications and Networking
4.4. Recommendations
From the systems software proposals for WSNs, OS and VMtechnologies implement the single node control and separatesolutions for application distribution. The middleware pro-posals are applicable to the network-level distribution con-trol. However, we argue that in WSNs, OS and middlewarelayers must be integrated to provide sufficient services withinthe constraints set by applications and platform resources.
In this kind of an approach, OS and middleware are in-side the same framework so that information about OS in-ternals and network topology is applicable to the middle-ware layer. Thus, this approach minimizes extra computa-tion required for interfacing OS routines and communica-tion due to the control signaling. Further, the middlewarelayer is aware of the influences of its actions at both the singlenode and network level. This awareness can be beneficial inthe network-level power management and in the balancingof node loading.
For a sufficient environment for EnvMonitor, OS mustimplement a preemptive scheduling of tasks, a memory andpower management, and a local IPC. The memory controlshould support static and dynamic memory and maintain in-formation about available memory. We recommend the us-age of a message-passing IPC because it is easily extendedto the remote task communication. This kind of a general-purpose OS can be implemented on limited resources asshown in [25].
In addition to the local services, OS informs the middle-ware about the node energy and storage consumption, net-work role, associations, and nearby nodes and routes. An in-ternal interface for the middleware to control tasks, powerstates, and network is implemented in OS. When all distri-bution aspects are implemented on the middleware layer, thecomponents are able to utilize the information from eachother more efficiently.
For service discovery we recommend the tuple space,since the pure client-server architecture is too static forWSNs. The resource and communication load of the tuplespace can be diminished by selectively distributing tuple stor-ing to nodes that use the tuple data and by dividing tuples totwo-level hierarchies similar to GSD. The nodes that need atuple for their operation can be identified with the supportof task allocation. By sending only service group tuples to thedistant nodes, less memory is needed but requests for tuplescan still be routed accurately.
For the task allocation, the current application-QoS-based middleware proposals implement sufficient technolo-gies. However, simpler algorithms that require less controlcommunication should be used, even with the cost of accu-racy.
For the remote task communication we recommend asimple approach that marshals the local message passing IPCto network packets. The remote nodes are identified by theservice discovery. To make the delivery of a packet reliable,acknowledgements must be used. This is more lightweightthan the tuple space, and the fault tolerance does not dependon the available recipients.
From our perspective, the task migration is required onlyin very dynamic applications, like object tracking. Theseapplications require a VM-based environment. In OSs, thecommunication cost of the large binary transfers is extensive.Thus, the task migration should only be used when extremelynecessary. The transfers must be protected with checksumsand digital signatures, even though these are resource con-suming.
We recommend also the usage of virtual clusters. A vir-tual cluster may follow the physical topology or it can be aset of adjacent nodes that have elected a single control en-tity. By storing detailed tuple information and performingtask allocation within the boundaries of a virtual cluster, thecommunication and memory load can be diminished.
5. CONCLUSIONS
Our survey of WSN applications and their distributionshows that, despite many proposals, no common bench-marks nor detailed, large-scaled experiments have been pub-lished. The research seems to focus either on node imple-mentations or theoretical work on distinct aspects, such asrouting algorithms, without a realistic relation to physicalplatforms.
The systems software proposals are still evolving. Cur-rently, they implement technologies and algorithms for ap-plication distribution but lack an approach combining a dis-tributing middleware layer to OS providing a single nodecontrol. This kind of an approach is needed in order to im-plement a distributed operating environment, which sup-ports application QoS and extends network lifetime, for re-source scarce sensor nodes.
REFERENCES
[1] W. Stallings, Data & Computer Communications, Prentice-Hall, Englewood Cliffs, NJ, USA, 6th edition, 2001.
[2] J. A. Stankovic, T. E. Abdelzaher, C. Lu, L. Sha, and J. C. Hou,“Real-time communication and coordination in embeddedsensor networks,” Proc. IEEE, vol. 91, no. 7, pp. 1002–1022,2003.
[3] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci,“A survey on sensor networks,” IEEE Commun. Mag., vol. 40,no. 8, pp. 102–114, 2002.
[4] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci,“Wireless sensor networks: a survey,” Computer Networks,vol. 38, no. 4, pp. 393–422, 2002.
[5] K. Akkaya and M. Younis, “A survey on routing protocols forwireless sensor networks,” Elsevier Ad Hoc Network Journal,vol. 3, no. 3, pp. 325–349, 2005.
[6] H. Karl and A. Willig, “A short survey of wireless sen-sor networks,” Tech. Rep. TKN-03-018, Technical Univer-sity Berlin, Berlin, Germany, 2003, available: http://www.tkn.tu-berlin.de/publications.
[7] D. Chen and P. K. Varshney, “QoS support in wireless sensornetworks: a survey,” in Proc. International Conference on Wire-less Networks (ICWN ’04), pp. 227–233, Las Vegas, Nev, USA,June 2004.
[8] S. Tilak, N. B. Abu-Ghazaleh, and W. B. Heinzelman, “Ataxonomy of wireless micro-sensor network models,” ACMSIGMOBILE Mobile Computing and Communications Review,vol. 6, no. 2, pp. 28–36, 2002.

A Survey of Application Distribution in WSNs 787
[9] V. Raghunathan, C. Schurgers, S. Park, and M. B. Srivastava,“Energy-aware wireless microsensor networks,” IEEE SignalProcessing Mag., vol. 19, no. 2, pp. 40–50, 2002.
[10] A. J. Goldsmith and S. B. Wicker, “Design challenges forenergy-constrained ad hoc wireless networks,” IEEE WirelessCommunications, vol. 9, no. 4, pp. 8–27, 2002.
[11] D. Remondo and I. G. Niemegeers, “Ad hoc networking infuture wireless communications,” Computer Communications,vol. 26, no. 1, pp. 36–40, 2003.
[12] N. Xu, “A survey of sensor network applications,” available:http://enl.usc.edu/∼ningxu/papers/survey.pdf.
[13] C.-Y. Chong and S. P. Kumar, “Sensor networks: evolution,opportunities, and challenges,” Proc. IEEE, vol. 91, no. 8, pp.1247–1256, 2003.
[14] A. Mainwaring, J. Polastre, R. Szewczyk, D. Culler, and J. An-derson, “Wireless sensor networks for habitat monitoring,”in Proc. International Workshop on Wireless Sensor Networksand Applications (WSNA ’02), pp. 88–97, Atlanta, Ga, USA,September 2002.
[15] PODS, A Remote Ecological Micro-sensor Network Projectwebsite, http://www.pods.hawaii.edu.
[16] CORIE website, http://www.ccalmr.ogi.edu/CORIE.[17] A. Boulis, C.-C. Han, and M. B. Srivastava, “Design and im-
plementation of a framework for efficient and programmablesensor networks,” in Proc. 1st International Conference on Mo-bile Systems, Applications, and Services (MobiSys ’03), SanFrancisco, Calif, USA, May 2003.
[18] P. Bonnet, J. Gehrke, and P. Seshadri, “Querying the physicalworld,” IEEE Pers. Commun., vol. 7, no. 5, pp. 10–15, 2000.
[19] L. Schwiebert, S. K. S. Gupta, and J. Weinmann, “Researchchallenges in wireless networks of biomedical sensors,” inProc. 7th ACM International Conference on Mobile Comput-ing and Networking (MobiCom ’01), pp. 151–165, Rome, Italy,July 2001.
[20] W. B. Heinzelman, A. L. Murphy, H. S. Carvalho, and M. A.Perillo, “Middleware to support sensor network applications,”IEEE Network, vol. 18, no. 1, pp. 6–14, 2004.
[21] M. Storey, G. S. Blair, and A. Friday, “MARE: resource discov-ery and configuration in Ad hoc networks,” J. Mobile Networksand Applications, vol. 7, no. 5, pp. 377–387, 2002.
[22] H. O. Marcy, J. R. Agre, C. Chien, L. P. Clare, N. Romanov, andA. Twarowski, “Wireless sensor networks for area monitoringand integrated vehicle health management applications,” inProc. AIAA Guidance, Navigation, and Control Conference andExhibit, Portland, Ore, USA, 1999, Collection of Technical Pa-pers. Vol. 1 (A99-36576 09-63).
[23] K. Romer , “Tracking real-world phenomena with smartdust,” in Proc. 1st European Workshop on Wireless Sensor Net-works (EWSN ’04), pp. 28–43, Berlin, Germany, January 2004.
[24] C.-C. Shen, C. Srisathapornphat, and C. Jaikaeo, “Sensor in-formation networking architecture and applications,” IEEEPers. Commun., vol. 8, no. 4, pp. 52–59, 2001.
[25] H. Abrach, S. Bhatti, J. Carlson, et al., “MANTIS: system sup-port for MultimodAl NeTworks of In-situ Sensors,” in Proc.2nd ACM International Workshop on Wireless Sensor Networksand Applications (WSNA ’03), pp. 50–59, San Diego, Calif,USA, September 2003.
[26] M. B. Srivastava, R. R. Muntz, and M. Potkonjak, “Smartkindergarten: sensor-based wireless networks for smart de-velopmental problem-solving enviroments,” in Proc. 7th ACMInternational Conference on Mobile Computing and Network-ing (MobiCom ’01), pp. 132–138, Rome, Italy, July 2001.
[27] S. S. Yau, F. Karim, Y. Wang, B. Wang, and S. K. S. Gupta, “Re-configurable context-sensitive middleware for pervasive com-puting,” IEEE Pervasive Computing, vol. 1, no. 3, pp. 33–40,2002.
[28] NIST Wireless Ad hoc Networks Project website, http://www.antd.nist.gov/wahn ssn.shtml.
[29] MICA2 data sheet, available: http://www.xbow.com.[30] IEEE P1451.5 Wireless Sensor Working Group website,
http://grouper.ieee.org/groups/1451/5.[31] Bluetooth Special Interest Group, “Bluetooth specification,
version 1.1,” February 2001.[32] Wireless Medium Control (MAC) and Physical Layer (PHY)
Specifications for Low Rate Wireless Personal Area Networks(LR-WPAN), IEEE Standard 802.15.4, 2003.
[33] Wireless LAN Medium Control (MAC) and Physical Layer(PHY) Specifications, IEEE Standard 802.11, 1999.
[34] IETF Mobile Ad-hoc Networks Working Group website,http://www.ietf.org/html.charters/manet-charter.html.
[35] G. Coulouris, J. Dollimore, and T. Kindberg, Distributed Sys-tems: Concepts and Design, Addison-Wesley, Boston, Mass,USA, 3rd edition, 2001.
[36] A. Fuggetta, G. P. Picco, and G. Vigna, “Understanding codemobility,” IEEE Trans. Software Eng., vol. 24, no. 5, pp. 342–361, 1998.
[37] P. J. M. Havinga, “System architecture specification,”EYES Project Deliverable 1.1, available: http://www.eyes.eu.org/dissem.htm.
[38] J. Beutel, O. Kasten, F. Mattern, K. Roemer, F. Siegemund, andL. Thiele, “Prototyping wireless sensor networks with BTn-odes,” in Proc. 1st European Workshop on Wireless Sensor Net-works (EWSN ’04), pp. 323–338, Berlin, Germany, January2004.
[39] J. Hill, R. Szewczyk, A. Woo, S. Hollar, D. Culler, and K. Pis-ter, “System architecture directions for networked sensors,” inProc. 9th ACM International Conference on Architectural Sup-port for Programming Languages and Operating Systems (AS-PLOS ’00), pp. 94–103, Cambridge, Mass, USA, November2000.
[40] J. Lifton, D. Seetharam, M. Broxton, and J. Paradiso, “Push-pin computing system overview: a platform for distributed,embedded, ubiquitous sensor networks,” in Proc. 1st Interna-tional Conference on Pervasive Computing (Pervasive ’02), pp.139–151, Zurich, Switzerland, August 2002.
[41] QNX website, http://www.qnx.com.[42] OSE website, http://www.ose.com.[43] R. Barr, J. C. Bicket, D. S. Dantas, et al., “On the need
for system-level support for ad hoc and sensor networks,”ACM SIGOPS Newsletter on Operating Systems Review, vol. 36,no. 2, pp. 1–5, 2002.
[44] E. G. Sirer, R. Grimm, A. J. Gregory, and B. N. Bershad, “De-sign and implementation of a distributed virtual machinefor networked computers,” in Proc. 17th ACM Symposium onOperating Systems Principles (SOSP ’99), pp. 202–216, KiawahIsland, SC, USA, December 1999.
[45] P. Levis and D. Culler, “Mate: a tiny virtual machine for sen-sor networks,” in Proc. 10th ACM International Conference onArchitectural Support for Programming Languages and Oper-ating Systems (ASPLOS ’02), pp. 85–95, San Jose, Calif, USA,October 2002.
[46] D. Gelernter, “Generative communication in linda,” ACMTrans. Programming Languages and Systems, vol. 7, no. 1, pp.80–112, 1985.
[47] E. Guttman, C. Perkins, J. Veizades, and M. Day, “Service lo-cation protocol, version 2,” IETF, RFC 2608, June 1999.
[48] Jini Architecture Specification, version 2.0, Sun Microsystems,June 2003, available: http://www.sun.com/software/jini/specs.
[49] UPnP Device Architecture, Microsoft Corporation, June 2000,available: http://www.upnp.org/resources/documents.asp.
[50] S. E. Czerwinski, B. Y. Zhao, T. D. Hodes, A. D. Joseph, andR. H. Katz, “An architecture for a secure service discovery

788 EURASIP Journal on Wireless Communications and Networking
service,” in Proc. 5th International Conference on Mobile Com-puting and Networking (MobiCom ’99), pp. 24–35, Seattle,Wash, USA, August 1999.
[51] JavaSpaces Service Specification, version 2.0, Sun Microsys-tems, June 2003, available: http://www.sun.com/software/jini/specs.
[52] T. J. Lehman, A. Cozzi, Y. Xiong, et al., “Hitting the dis-tributed computing sweet spot with TSpaces,” Computer Net-works, vol. 35, no. 4, pp. 457–472, 2001.
[53] R. Srinivasan, “RPC: remote procedure call protocol specifi-cation version 2,” IETF, RFC 1831, August 1995.
[54] The Open Group Portal to World of DCE, website, http://www.opengroup.org/dce.
[55] Object Management Group website, http://www.omg.org.[56] Java RMI specification, Sun Microsystems, 1997–2003, avail-
able: http://java.sun.com/products/jdk/rmi/reference/docs.[57] M. Horstmann and M. Kirtland, “DCOM architec-
ture,” Microsoft Corporation, July 1997, available: http://msdn.microsoft.com/library/default.asp?url=/library/en-us/dnanchor/html/dcom.asp.
[58] A. Schill and S. Kummel, “Design and implementation ofa support platform for distributed mobile computing,” Dis-tributed Systems Engineering, vol. 2, no. 3, pp. 128–141, 1995.
[59] S. Adwankar, “Mobile CORBA,” in Proc. 3rd InternationalSymposium on Distributed Objects and Applications (DOA’01), pp. 52–63, Rome, Italy, September 2001.
[60] A. D. Joseph, J. A. Tauber, and M. F. Kaashoek, “Mobile com-puting with the rover toolkit,” IEEE Trans. Comput., vol. 46,no. 3, pp. 337–352, 1997.
[61] Supercluster.org website, http://www.supercluster.org.[62] B. Schilit, N. Adams, and R. Want, “Context-aware computing
applications,” in Proc. Workshop on Mobile Computing Systemsand Applications (WMCSA ’94), pp. 85–90, Santa Cruz, Calif,USA, December 1994.
[63] Y. Yu, B. Krishnamachari, and V. K. Prasanna, “Issues in de-signing middleware for wireless sensor networks,” IEEE Net-work, vol. 18, no. 1, pp. 15–21, 2004.
[64] K. Nahrstedt, X. Dongyan, D. Wichadakul, and L. Baochun,“QoS-aware middleware for ubiquitous and heterogeneousenvironments,” IEEE Commun. Mag., vol. 39, no. 11, pp. 140–148, 2001.
[65] S. R. Madden, M. J. Franklin, J. M. Hellerstein, and W. Hong,“The design of an acquisitional query processor for sensornetworks,” in Proc. 22nd ACM SIGMOD International Con-ference on Management of Data (SIGMOD ’03), pp. 491–502,San Diego, Calif, USA, June 2003.
[66] Y. Yao and J. Gehrke, “The Cougar approach to in-networkquery processing in sensor networks,” ACM SIGMOD Record,vol. 31, no. 3, pp. 9–18, 2002.
[67] A. L. Murphy, G. P. Picco, and G.-C. Roman, “LIME: amiddleware for physical and logical mobility,” in Proc. 21stInternational Conference on Distributed Computing Systems(ICDCS ’01), pp. 524–533, Phoenix, Ariz, USA, April 2001.
[68] S. S. Yau and F. Karim, “An energy-efficient object discov-ery protocol for context-sensitive middleware for ubiquitouscomputing,” IEEE Trans. Parallel Distrib. Syst., vol. 14, no. 11,pp. 1074–1085, 2003.
[69] D. Chakraborty, A. Joshi, Y. Yesha, and T. Finin, “GSD: anovel group-based service discovery protocol for MANETS,”in Proc. 4th International Workshop on Mobile and WirelessCommunications Network (MWCN ’02), pp. 140–144, Stock-holm, Sweden, September 2002.
[70] N. Reijers and K. Langendoen, “Efficient code distributionin wireless sensor networks,” in Proc. 2nd ACM International
Workshop on Wireless Sensor Networks and Applications, pp.60–67, San Diego, Calif, USA, September 2003.
[71] C. Jaikaeo, C. Srisathapornphat, and C.-C. Shen, “Query-ing and tasking in sensor networks,” in Proc. 14th Interna-tional Symposium on Aerospace/Defense Sensing, Simulation,and Control, vol. 4037 of Proc. SPIE’s, pp. 184–197, Orlando,Fla, USA, April 2000.
[72] P. Levis, N. Lee, M. Welsh, and D. Culler, “TOSSIM: accu-rate and scalable simulation of entire TinyOS applications,”in Proc. 1st ACM Conference on Embedded Networked SensorSystems (SenSys ’03), pp. 126–137, Los Angeles, Calif, USA,November 2003.
[73] S. Park, A. Savvides, and M. B. Srivastava, “Simulating net-works of wireless sensors,” in Proc. Winter Simulation Confer-ence (WSC ’01), pp. 1330–1338, Arlington, Va, USA, Decem-ber 2001.
[74] X. Zeng, R. Bagrodia, and M. Gerla, “GloMoSim: a library forparallel simulation of large-scale wireless networks,” in Proc.12th Workshop on Parallel and Distributed Simulations (PADS’98), pp. 154–161, Banff, Alberta, Canada, May 1998.
[75] Y. Yu and V. K. Prasanna, “Energy-balanced task allocationfor collaborative processing in networked embedded systems,”in Proc. ACM SIGPLAN Conference on Languages, Compilers,and Tools for Embedded Systems (LCTES ’03), pp. 265–274, SanDiego, Calif, USA, June 2003.
Mauri Kuorilehto received the M.S. de-gree in 2001 from Tampere University ofTechnology (TUT), Finland. He is currentlypursuing his Ph.D. degree and acting asa Research Scientist in the DACI ResearchGroup, the Institute of Digital and Com-puter Systems at TUT. His research inter-ests include wireless sensor and ad hoc net-works concentrating on distributed pro-cessing, operating systems, and networksimulation.
Marko Hannikainen received the M.S. de-gree in 1998 and the Ph.D. degree in 2002both from Tampere University of Technol-ogy (TUT). Currently he acts as a SeniorResearch Scientist in the Institute of Dig-ital and Computer Systems at TUT, anda Project Manager in the DACI ResearchGroup. His research interests include wire-less local and personal area networking,wireless sensor and ad hoc networks, andnovel web services.
Timo D. Hamalainen received the M.S. de-gree in 1993 and the Ph.D. degree in 1997both from Tampere University of Technol-ogy (TUT). He acted as a Senior ResearchScientist and Project Manager at TUT dur-ing 1997–2001. He was nominated to beFull Professor at TUT, Institute of Dig-ital and Computer Systems in 2001. Heheads the DACI Research Group that fo-cuses on three main lines: wireless localarea networking and wireless sensor networks, high-performanceDSP/HW-based video encoding, and interconnection networkswith design flow tools for heterogeneous SoC platforms.