Activity 1: Multi-sensor based Navigation of Intelligent Wheelchairs Theo Theodoridis and Huosheng...
12
Activity 1: Multi-sensor based Navigation of Intelligent Wheelchairs Theo Theodoridis and Huosheng Hu University of Essex 27 January 2012 Ecole Centrale de Lille Part-financed by the European Regional Development Fund
-
Upload
marilyn-kennedy -
Category
Documents
-
view
217 -
download
1
Transcript of Activity 1: Multi-sensor based Navigation of Intelligent Wheelchairs Theo Theodoridis and Huosheng...

Activity 1: Multi-sensor based Navigation of Intelligent Wheelchairs
Theo Theodoridis and Huosheng HuUniversity of Essex
27 January 2012Ecole Centrale de Lille
Part-financed by the European Regional Development Fund

Part-financed by the European
Regional Development Fund
I. Outline of the task within the context of the project
This activity is focused on the development of tools for autonomous navigation of the wheelchair.
To deal with the problem of the prototyping of autonomous and intelligent wheelchairs, transporting people inside and outside buildings.
To localize itself in an a priori unknown environment, to detect and avoid the obstacles.
To be driven manually, semi-automatically or automatically depending on the state of the user.
The movement orders can come either from the user or the embedded system. The wheelchair can also have specific functionalities depending on the user.
2
Part-financed by the European
Regional Development Fund
1. Outline of the task within the context of the project
Activities at Essex has focused on the following major tasks:
1) Instrumentation (sensors, actuators, computer interface) and data fusing algorithms for real-time localisation and obstacle identification of intelligent wheelchairs.
2) Development of the navigation strategy in order to avoid the collision between the intelligent wheelchair and obstacles and to guarantee a safe functioning.
3) Numerical implementation, tests and validation of the algorithms on the prototype wheelchair.
3
Part-financed by the European
Regional Development Fund
II. Main results
4
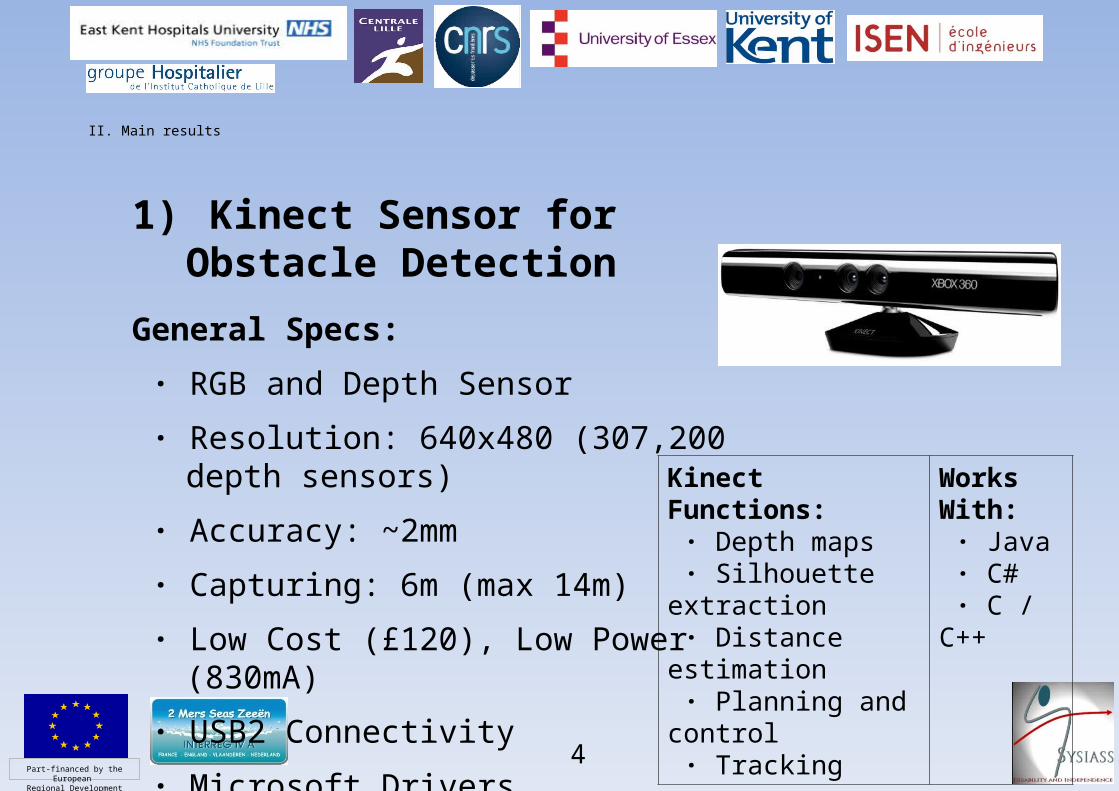
1) Kinect Sensor for Obstacle Detection
General Specs:
· RGB and Depth Sensor
· Resolution: 640x480 (307,200 depth sensors)
· Accuracy: ~2mm
· Capturing: 6m (max 14m)
· Low Cost (£120), Low Power (830mA)
· USB2 Connectivity
· Microsoft Drivers
Kinect Functions: · Depth maps · Silhouette extraction · Distance estimation · Planning and control · Tracking
Works With: · Java · C# · C / C++
Part-financed by the European
Regional Development Fund
II. Main results
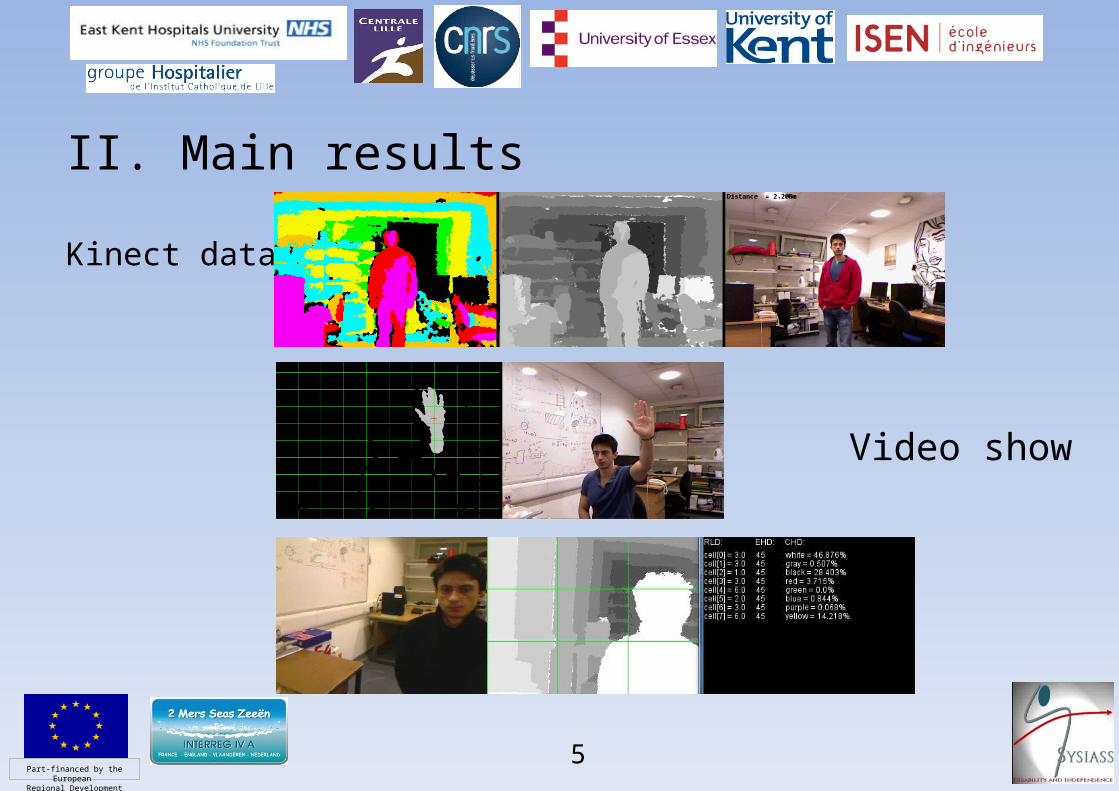
Kinect data
5
Video show
Part-financed by the European
Regional Development Fund
II. Main results
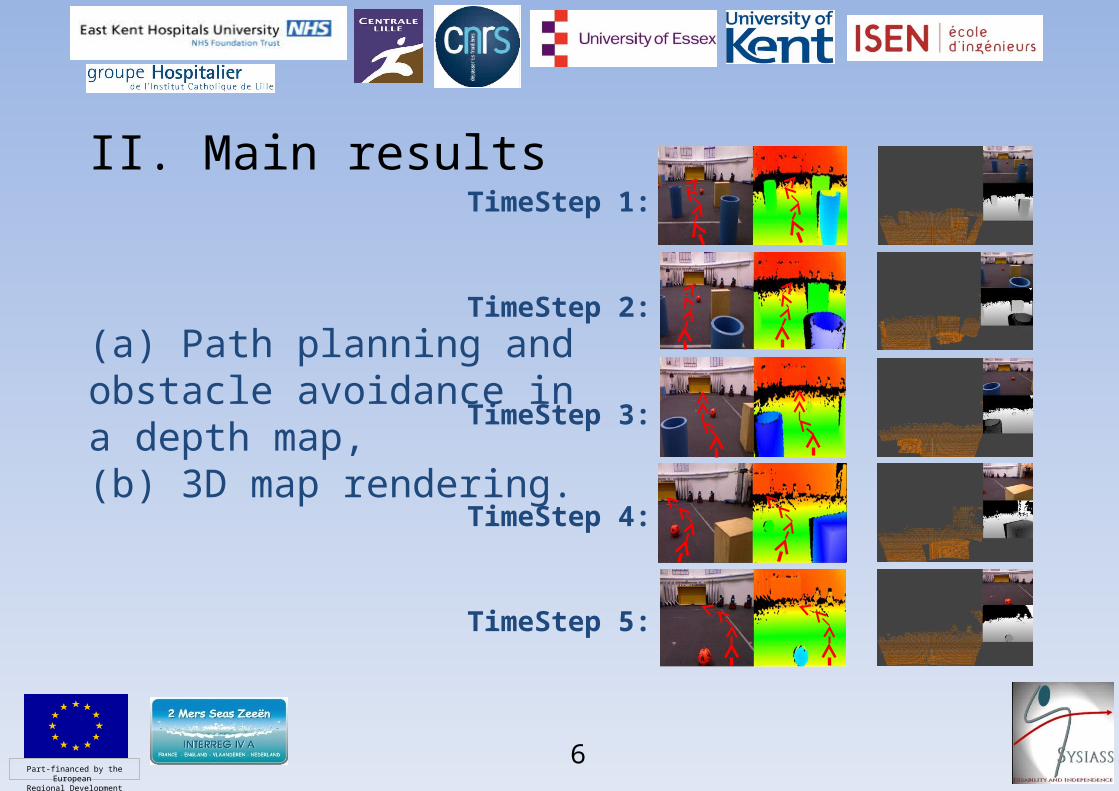
(a) Path planning and obstacle avoidance in a depth map, (b) 3D map rendering.
6
TimeStep 1:
TimeStep 2:
TimeStep 3:
TimeStep 4:
TimeStep 5:
Part-financed by the European
Regional Development Fund
II. Main results 2) GPS for outdoor navigation• General Specs:• Longitude and Latitude in Signed
Decimal Degree format• Position Accuracy (best case)
~2.5m CEP• Works when Satellite Fix• "Hot Starts" Remembering
Previous Positions• Signal Re-Acquisition < 1 second• USB Access Interface
7
GPS Return Params: · Longitude · Latitude · Altitude · Heading · Velocity · Time · Date
Works With: · Java · C# · C / C++ · LabView · Python · Visual Basic · Ruby
Part-financed by the European
Regional Development Fund
II. Main results
8
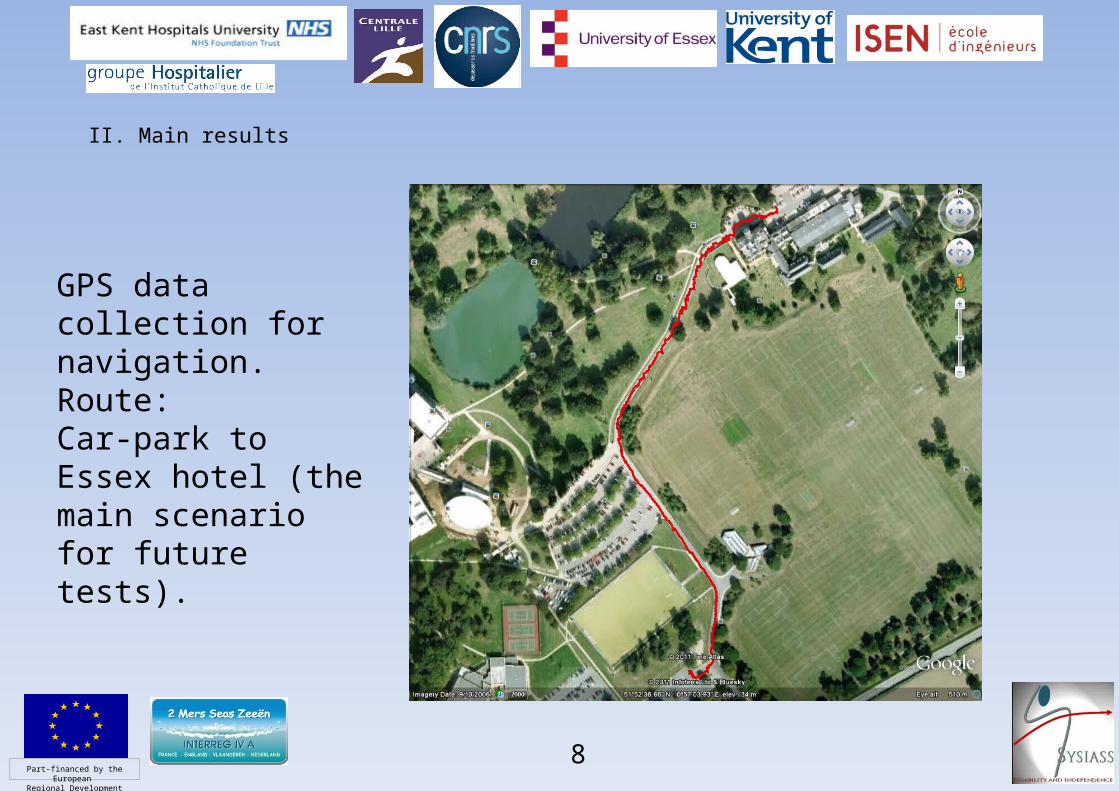
GPS data collection for navigation. Route: Car-park to Essex hotel (the main scenario for future tests).

Part-financed by the European
Regional Development Fund
• Methodology: Tangent-Node LocalisationDescription: Incorporates: · Discrete node-based localisation · Sensor fusion · Assignment of N nodes · Obstacle avoidance · Reset coords at every node · Landmark-based feature detection
Benefits: · Significant reduction of the odometry error · Problem decomposition in multiple directed goals · Computationally inexpensive and implementationaly easy · Robust navigation in N-dimensional and unstructured environments
Applications: · Mobile robots; Wheelchairs · Flying robots; · Fish robots The robot’s actual path, implemented in 6 predefined node locations (n).

Part-financed by the European
Regional Development Fund
II. Main resultsStateful Genetic Programming (GP)Traditional GP• GP: A GA with a tree-based representation• Individuals (trees) are constructed recurrently• Solutions induce equations, algorithms• Trees return single values, arrays, or data structuresStateful GP• SGP: Introduces memory (state) to trees• Stateful representations; Mental Model• Metal models model the environment• Read/Write operators are used• To estimate a solution• Decision making is more representative
10

Part-financed by the European
Regional Development Fund
II. Main resultsStateful Localisation• SGP is used here for localisation and
modelling• Environment is modeled via indexed
memory (state)• Decision making is accomplished by a GP
tree• Evolutionary process is utilised to construct
adequate• localizers
11

Part-financed by the European
Regional Development Fund
III. Future challenges and the work to be done Activities at Essex will focus on the following major tasks:
1) To develop SLAM algorithms for real-time localisation both indoor (US beacons+IMU) and outdoor (GPS+IMU).
2) Using Kinect sensor to develop the navigation strategy in order to avoid the collision between the intelligent wheelchair and obstacles for a safe travelling.
3) To deploy A* search algorithm and build statistical models for path conditions for the development of optimal path planning.
12