Abstracts Booklet 2013 - School of Mechanical Engineering
58
Transcript of Abstracts Booklet 2013 - School of Mechanical Engineering
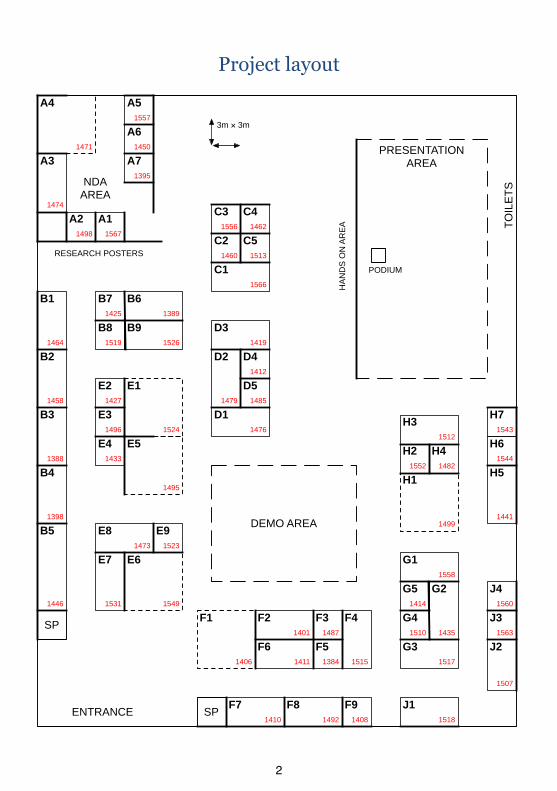
Project layout
SP
SP
DEMO AREA
PRESENTATIONAREA
1388
1389
1395
1398
1419
1441
1446
1450
1458
1460
1464
1471
1473
1474
1476
1479
14871401
1406
14081410
1411
1492
1495
1498
1499
1513
1517
1518
1519
1523
1524
1526
1531
1544
1549
1412
1414
1425
1427
1462
1485
1496
1552
1557
1433
1507
1512
1515
1556
1558
1560
1563
1384
1435
1482
1510
1543
1566
1567
PODIUM
RESEARCH POSTERS
HAND
S O
N AR
EA
3m × 3m
ENTRANCE
TOIL
ETSNDA
AREA
A1A2
A3
A4 A5
A6
A7
B1
B2
B3
B4
B5
B6B7
B8 B9
C1
C2
C3
J2
C4
C5
D1
D2
D3
D4
D5E1E2
E3
E4 E5
E6E7
E8 E9
F1 F2 F4
F6
F7 F8 F9
G1
G2
G3
G4
G5
H1
H2
H3
H4 H6
H5
J1
F3 J3
J4
F5
H7
2

WelcomeThe School of Mechanical Engineering welcomes you to the annual student ProjectExhibition, MechExpo. On display are Level IV student projects dealing with both re-search and design.
The projects are initiated either by one of our industry partners, our students, orour staff and deal with topics ranging from system analysis and design to experimentalinvestigations of fundamental research problems. Students enrolled in one of our sixprograms, mechanical, mechatronic, aerospace, automotive, sustainable energy andsport engineering, contribute to this exhibition. On a number of occasions in the paststudent solutions have led to patentable systems. Although some projects are under-taken by individual students, most are group projects involving up to ten students, andrepresent in excess of 300 hours work per student.
The School of Mechanical Engineering would like to thank all contributing organi-sations for their support and we look forward to further strengthening industry involve-ment in our final year projects in the future.
We hope you will enjoy the exhibition and take the opportunity to discuss withstudents and staff any aspect of the projects that you find of interest.
Professor Bassam DallyHead of School, Mechanical Engineering
3

MechExpo is proudly presented by Bronze Sponsor:
4

The exhibition is proudly presented by Media Sponsor:
5

The exhibition prizes are proudly sponsored by
6

The exhibition prizes are proudly sponsored by
7
Index of projects by boothA1. Characterising the wear of a seed destructor . . . . . . . . . . . . . . . . . . . . 10A2. Characterising lithium batteries for marine applications . . . . . . . . . . . . . 11A3. Automatic weatherproof clothesline cover . . . . . . . . . . . . . . . . . . . . . . 11A4. Oscillating water column wave power converter for micro-generation . . . . 12A5. Designing a novel hybrid furnace with a combustor and a solar receiver
using CFD techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13A6. Biomechanical evaluation of a novel suture anchor design for rotator cuff
tendon repair . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14A7. Development of an automatic swabbing machine for Amcor . . . . . . . . . . 14B1. The Exoskeleton Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15B2. Design and build of submarine (mission demonstration) . . . . . . . . . . . . 15B3. Solar thermal / UV water treatment for humanitarian use . . . . . . . . . . . . 16B4. RoboBand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17B5. QB50 satellite and payload design . . . . . . . . . . . . . . . . . . . . . . . . . . .17B6. Low-emission cook stoves for the developing world . . . . . . . . . . . . . . . 18B7. Laser based composite damage detection . . . . . . . . . . . . . . . . . . . . . 19B8. Son of Bluebottle (BlueBottle Mk 2) . . . . . . . . . . . . . . . . . . . . . . . . . . 19B9. Sound directivity from high temperature exhaust stacks . . . . . . . . . . . . .20C1. A fast but safe keg handling system for a traditional hotel with cellar
storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20C2. Dielectric barrier discharge (DBD) non-thermal micro-plasma source . . . . 21C3. Cyclist CdA measurement in the wind tunnel and on the track . . . . . . . . 21C4. Autonomous robot for mapping soil properties . . . . . . . . . . . . . . . . . . . 22C5. Inverse modelling of pollutant dispersion . . . . . . . . . . . . . . . . . . . . . . 22D1. Omnibot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23D2. Design and build a solar water heater testing rig . . . . . . . . . . . . . . . . . 24D3. Maximising power output of a sprint kayaker . . . . . . . . . . . . . . . . . . . . 25D4. Jet flame modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25D5. BlueBottle autonomous submarine navigation and control . . . . . . . . . . . 26E1. Compressed air vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27E2. Design and build a hybrid renewable energy production, storage and
management system for household application . . . . . . . . . . . . . . . . . . 28E3. Scuba suit warmer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28E4. Design and test a lift type vertical axis wind turbine . . . . . . . . . . . . . . . .29E5. HAVoC: Haptic Autonomous Vortex Cannon . . . . . . . . . . . . . . . . . . . . 30E6. Formula Vee fuel injection system . . . . . . . . . . . . . . . . . . . . . . . . . . . 31E7. Infinity bicycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32E8. ASRI multi-stage launch vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
8

E9. Aerodynamic characteristics of Australian Rules footballs . . . . . . . . . . . 33F1. Intelligent maritime UAV catapult robot, detection & tracking using Fast
SLAM: A feasibility study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34F2. Renewable energy by utilising hydrogen fuel cells with the support of
automated spar buoy for oceanic application . . . . . . . . . . . . . . . . . . . . 35F3. Cat falling robot lands on its feet . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36F4. Direct injection retrofit to a two-stroke motorcycle engine . . . . . . . . . . . . 37F5. Design and test quiet high-speed jet engine nozzles . . . . . . . . . . . . . . . 37F6. Design, research & development on intelligent swarm networking of UAVs,
SUVs & AUVs for oceanic applications . . . . . . . . . . . . . . . . . . . . . . . . 38F7. Automated oceanic wave surface glider robot operations: A viability study 39F8. Design and build a maritime quadcopter UAV with automation and
deployment capabilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40F9. Intelligent submersible thermal glider robot, system operations for
deep-sea applications: A feasibility study . . . . . . . . . . . . . . . . . . . . . . 41G1. Instrumented rowing ergometer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42G2. The effect of wing leading edge tubercles on induced drag . . . . . . . . . . .43G3. Performance and assessment of archery bow-arrow interaction . . . . . . . 44G4. Design of self-cleaning surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44G5. Design and build a model gas turbine combustor . . . . . . . . . . . . . . . . . 45H1. Biomechanics of sport climbing . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46H2. Energy return in running shoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47H3. Sustainable marine current energy . . . . . . . . . . . . . . . . . . . . . . . . . . 48H4. High temperature thermal storage system . . . . . . . . . . . . . . . . . . . . . .49H5. Investigation of the wake of a horizontal axis wind turbine . . . . . . . . . . . 49H6. Develop a data acquisition system for a Swearingen SX-300 . . . . . . . . . 51H7. Flow morphology of a plasma actuator . . . . . . . . . . . . . . . . . . . . . . . . 51J1. AUV mother ship . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52J2. Evaluation of stress and strain in gas and oil pipelines: A real enginnering
project . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53J3. Measurement of radiant fraction of ceremonial flames . . . . . . . . . . . . . . 54J4. Automatic test station for firework ignition systems . . . . . . . . . . . . . . . . 55
9

A1 Characterising the wear of a seed destructor
Student James BarrSupervisors Assoc. Prof. Reza Ghomashchi, Dr Erwin Gamboa
Sponsors Dr Chris Saunders and Nicolas Berry, Barbara Hardy Institute,University of South Australia.
Every year about a quarter of the world’s food needs are delivered by the global graincrops, making the productivity and sustainability of these crops crucial. The BarbaraHardy Institute at University of South Australia specialises in agricultural machineryresearch are currently developing a mechanical weed seed destructor; a specially de-signed mill that destroys weed seeds in the chaff fraction out of a combine harvesterduring harvest in order to stop weed seeds germinating the following season. Consid-ering the wear on the internal components and the potential life of the machine is animportant step in its development.
The wear of the seed destructor had to be placed into a operational perspective,such as how many hours work or how many hectares it can cover in the field be-fore parts will need replacing, ensuring that there is no unexpected down time in thefarmers harvest. To achieve this, the wear from the chaff fraction was characterised,determining the wear mechanisms and rate of chaff and comparing them to an abra-sive sand particle for two different construction materials. The results, along with afailure analysis were extrapolated to determine an approximation for the life of theseed destructor.
10
A2 Characterising lithium batteries for marine applications
Students Aaron Williams, Jared Cmrlec, Matthew Clarke, Chris RebuliSupervisor Dr Erwin Gamboa
Sponsor Pacific Marine Batteries: Defence Engineering
The Australian submarine fleet consists of conventional diesel-electric submarines,which are powered by lead-acid batteries. Our project sponsor PMB Defence En-gineering wish to investigate the feasibility of upgrading the battery technology tolithium-titanate batteries. Lithium-titanate batteries have a higher energy density thanlead-acid, meaning that a smaller volume of batteries is required to store the sameamount of energy. Advantages in the charging process would also shorten the totaltime a submarine needs to remain surfaced during transit. When introducing a newtechnology, maintaining the safety of the system is the first priority. Lithium-ion cellshave known failure modes including thermal runaway which have been made publicby recent issues with the Boeing 787 Dreamliner. When lithium-ion cells are designedinto a module a single cell failure can lead to cascading cell failures and significantamounts of energy and smoke release. Lithium-titanate cells are significantly saferthan standard lithium-ion batteries, however the rare case of a cell failure still needs tobe managed. This project focused on safely managing these failures at a sub-modulelevel. At the 2013 MechExpo, the project team will display their research and findings.The completed battery module will be on display for visitors to view.
A3 Automatic weatherproof clothesline cover
Students Jintao Hu, Ka Yee Kwok, Yu Ting Law, Tao Nie, Xinguang ZhuSupervisor Dr. Ley Chen
Although it has not been employed extensively, automatic weatherproof clotheslinecover (AWCC) provides an alternative power saving option for family household ap-pliance. A rain detective AWCC can be used to prevent washed clothes from beingdrenched by rain when the weather is changed. It is not only eliminated the proce-dure of rewashing clothes that wetted by rain, it also reduced electricity and waterconsumption by applying this clever clothesline cover.
11
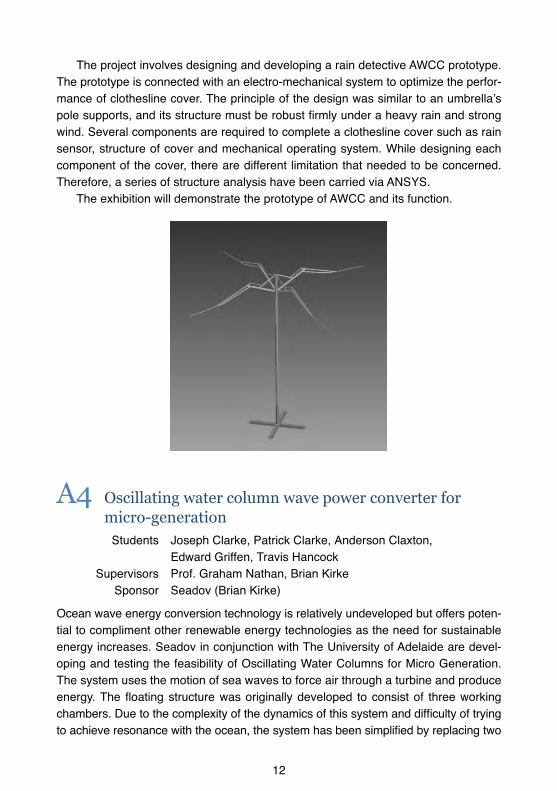
The project involves designing and developing a rain detective AWCC prototype.The prototype is connected with an electro-mechanical system to optimize the perfor-mance of clothesline cover. The principle of the design was similar to an umbrella’spole supports, and its structure must be robust firmly under a heavy rain and strongwind. Several components are required to complete a clothesline cover such as rainsensor, structure of cover and mechanical operating system. While designing eachcomponent of the cover, there are different limitation that needed to be concerned.Therefore, a series of structure analysis have been carried via ANSYS.
The exhibition will demonstrate the prototype of AWCC and its function.
1474. Automatic Weatherproof Clothesline Cover Supervisor: Dr. Ley Chen Students: Jintao Hu, Ka Yee Kwok, Yu Ting Law, Tao Nie, Xinguang Zhu
Although it has not been employed extensively, automatic weatherproof clothesline cover (AWCC) provides an alternative power saving option for family household appliance. A rain detective AWCC can be used to prevent washed clothes from being drenched by rain when the weather is changed. It is not only eliminated the procedure of rewashing clothes that wetted by rain, it also reduced electricity and water consumption by applying this clever clothesline cover.
The project involves designing and developing a rain detective AWCC prototype. The prototype is connected with an electro-mechanical system to optimize the performance of clothesline cover. The principle of the design was similar to an umbrella's pole supports, and its structure must be robust firmly under a heavy rain and strong wind. Several components are required to complete a clothesline cover such as rain sensor, structure of cover and mechanical operating system. While designing each component of the cover, there are different limitation that needed to be concerned. Therefore, a series of structure analysis have been carried via ANSYS. The exhibition will demonstrate the prototype of AWCC and its function.
A4 Oscillating water column wave power converter formicro-generation
Students Joseph Clarke, Patrick Clarke, Anderson Claxton,Edward Griffen, Travis Hancock
Supervisors Prof. Graham Nathan, Brian KirkeSponsor Seadov (Brian Kirke)
Ocean wave energy conversion technology is relatively undeveloped but offers poten-tial to compliment other renewable energy technologies as the need for sustainableenergy increases. Seadov in conjunction with The University of Adelaide are devel-oping and testing the feasibility of Oscillating Water Columns for Micro Generation.The system uses the motion of sea waves to force air through a turbine and produceenergy. The floating structure was originally developed to consist of three workingchambers. Due to the complexity of the dynamics of this system and difficulty of tryingto achieve resonance with the ocean, the system has been simplified by replacing two
12
of the chambers with buoyancy. The rig has been tested before and after this modifi-cation in flat water conditions with forced simulations to validate the modification.
A model of the fluid mechanics in the chamber is going to be constructed along witha full working model of the dynamics of the system by analysing the spring and dampercoefficients of the system through physical testing and collecting data from height andpressure measurements. This model will then be applied to different ocean conditionscenarios and validated with ocean wave testing. The exhibition will showcase thework completed over the year.
A5 Designing a novel hybrid furnace with a combustor anda solar receiver using CFD techniques
Students Chongqing Mao, Zhannan Du, Zheng LuoSupervisors Dr Zhao Tian, Prof. Graham Nathan, Assoc. Prof. Farid Cristo
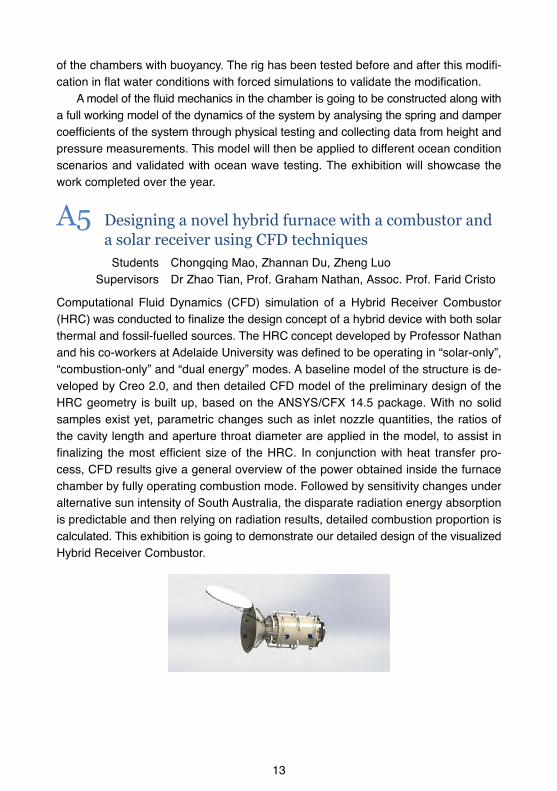
Computational Fluid Dynamics (CFD) simulation of a Hybrid Receiver Combustor(HRC) was conducted to finalize the design concept of a hybrid device with both solarthermal and fossil-fuelled sources. The HRC concept developed by Professor Nathanand his co-workers at Adelaide University was defined to be operating in “solar-only”,“combustion-only” and “dual energy” modes. A baseline model of the structure is de-veloped by Creo 2.0, and then detailed CFD model of the preliminary design of theHRC geometry is built up, based on the ANSYS/CFX 14.5 package. With no solidsamples exist yet, parametric changes such as inlet nozzle quantities, the ratios ofthe cavity length and aperture throat diameter are applied in the model, to assist infinalizing the most efficient size of the HRC. In conjunction with heat transfer pro-cess, CFD results give a general overview of the power obtained inside the furnacechamber by fully operating combustion mode. Followed by sensitivity changes underalternative sun intensity of South Australia, the disparate radiation energy absorptionis predictable and then relying on radiation results, detailed combustion proportion iscalculated. This exhibition is going to demonstrate our detailed design of the visualizedHybrid Receiver Combustor.
13

A6 Biomechanical evaluation of a novel suture anchordesign for rotator cuff tendon repair
Student Hui ZhouSupervisors Dr Claire Jones, Mr Will Robertson
Sponsor Mr Michael Sandow (Discipline of Orthopaedics & Trauma,School of Medicine, University of Adelaide)
Collaborator Dr Andrew Morris (Orthopaedic Registrar, Royal AdelaideHospital)
Rotator cuff tendon repair failure occurs at a rate of 11.4–94% (Randelli et al., 2011). Asuture anchor is a device used to provide stable fixation of the sutures which tether thetendon to the bone. Currently, suture anchors are embedded into the cancellous bone;this is problematic as the anchors are easily pulled out of poor quality or osteoporoticbone. A new suture anchor that engages with the cortical bone, which is less affectedby osteoporosis, is being developed by a surgeon at the Royal Adelaide Hospital. Theaim of this project is to biomechanically evaluate several design iterations of the newsuture anchor. A finite element model and several mechanical tests, including “suturepull-through”, “push-through”, and “back-out” tests, have been developed to evaluatepossible modes of anchor failure. The Mech Expo will exhibit the progress and resultsto date.
A7 Development of an automatic swabbing machine forAmcor
Student Michele CicconeSupervisors Dr Cristian Birzer, Assoc. Prof. Ben Cazzolato
Sponsor Amcor Glass
Amcor Glass wishes to develop an automated blank-side mould lubrication systemto replicate and replace the current manual swabbing process to improve safety andproductivity. The current manual lubrication process poses a safety risk to the lineoperators. Furthermore the amount of lubricant applied can significantly influence theproduct surface quality and as a consequence of the manual swabbing process, thequality is highly dependent on the experience of the operator. The current project in-cludes a design and feasibility assessment of various automated lubrication systems,including comparisons of commercial off the shelf systems and specific designs of be-spoke systems, constructed from a selection of individual components. Additionally,the project has included an investigation into new lubrication application methods;specifically various brush designs. The findings of the cost and performance compar-isons from this project will be used by Amcor to build a series of automated blankmould lubrication systems.
14

B1 The Exoskeleton Device
Students Di Cao, Angus Church, Shen Long, Samuel Skewes,Jared Steventon, Haoyan Wang
Supervisor Dr Tien-Fu Lu
An exoskeleton is a device that operates in conjunction with a user in order to enhancehis/her physical capabilities. An exoskeleton is by definition attached to the outside ofthe user and mimics the motions of the user while in turn aiding them.
Due to muscle weakness, there are many people in our society today who cannotwalk or manoeuvre themselves around without assistance, the most common solu-tions on the market are walking frames and crutches, however these require the useof both hands to operate. The goal of the project was to build an exoskeleton devicethat encapsulates the legs of the user and provides extra power to the user throughthe use of motors placed at the user’s joints. The main focus was on increasing thelower extremity abilities of elderly users as well as restoring their independence.
The device works by sensing the signals in the user’s muscles. In this way theuser’s intent to move can be determined even if no movement occurs. This can makethe exoskeleton useful for not only elderly users, but also for users with muscle weak-ness, users requiring rehabilitation of their lower body or even for heavy lifting appli-cations.
B2 Design and build of submarine (mission demonstration)
Students Brodie McBain, Anthony Razzi, Samuel Kellock,Waylen Ramsey, Mason Said, Michael Thomas
Supervisor Assoc. Prof. Andrei Kotousov
The global objective of this project is to develop a fully-functional modular submergi-ble platform capable of completing a number of practical missions such as inspec-tions, mapping and payload delivery. Through this venture, it is intended to improvethe understanding of the advanced submarine design and stimulate further interest insubmarine technologies among the students of the University of Adelaide.
The design and build of a submarine has been in continuation for two years, andhas resulted in a submersible platform ready for testing. The functionality of the plat-form is verified through the program of testing of individual subsystems. The focus ofthe current project is on the design and demonstration of simple missions, which canbe completed with the designed submergible platform. The platform is modelled inboth CFD (ANSYS) and Simulink to display both Dynamic and Virtual characteristicsof submarine motion. The output of the dynamic and virtual modelling supply the dataneeded to develop the programming code and control algorithms in order to achieve
15

the successful mission demonstration.Through our research, development and carefully designed testing procedures,
the selected submarine manoeuvres have been successfully demonstrated and canbe utilised as a foundation for future submarine applications and developments. Thedisplay at the MechExpo will outline the major achievements and the successfullycompleted project.
B3 Solar thermal / UV water treatment for humanitarianuse
Students Harrison Evans, Anthony Liew, Mark Padovan,Michael Watchman
Supervisors Dr Cristian Birzer, Dr Peter KaltSponsors Santos Asia Pacific, ChildFund Australia
Imagine if your only available drinking water supply was contaminated with pathogensfrom faecal matter. This is the reality for 780 million people. Yet despite countlessinterventions, this problem still remains a formidable challenge resulting in over 1.5million preventable deaths each year.
In partnership with the aid organisation ChildFund, and with assistance from San-tos and the School of Molecular Life Sciences, this project is working to advancecommunal-based solar water treatment capabilities with villages in rural Papua NewGuinea (PNG) as an initial focus. Based on extensive research of existing technologyand social considerations, it has been identified that a continuously flowing solar disin-fection process using a compound parabolic collector has merit for such applications.However, the capabilities of such a system, especially when considering humanitarianlimitations, are sparsely documented in literature.
A testing rig, which enables environmental simulation, has been designed andconstructed to assess material selection, collector design, fluid dynamics, heat trans-fer and pathogenic reduction. Based on these results, a prototype system has beenconstructed using readily available resources to simulate local PNG capabilities. Re-sources to support ChildFund in system implementation have also been developed.
16
The constructed systems, experimentation results and implementation documentationwill be exhibited.
B4 RoboBand
Students Binna Nicholas-Allen, Cary Lin, Hywel Bennett, Wei ChewSupervisor Dr Steven Grainger
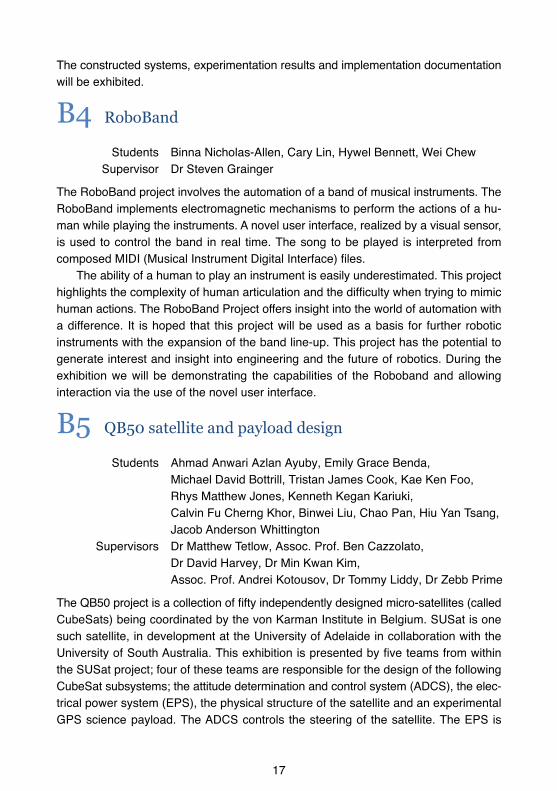
The RoboBand project involves the automation of a band of musical instruments. TheRoboBand implements electromagnetic mechanisms to perform the actions of a hu-man while playing the instruments. A novel user interface, realized by a visual sensor,is used to control the band in real time. The song to be played is interpreted fromcomposed MIDI (Musical Instrument Digital Interface) files.
The ability of a human to play an instrument is easily underestimated. This projecthighlights the complexity of human articulation and the difficulty when trying to mimichuman actions. The RoboBand Project offers insight into the world of automation witha difference. It is hoped that this project will be used as a basis for further roboticinstruments with the expansion of the band line-up. This project has the potential togenerate interest and insight into engineering and the future of robotics. During theexhibition we will be demonstrating the capabilities of the Roboband and allowinginteraction via the use of the novel user interface.
B5 QB50 satellite and payload design
Students Ahmad Anwari Azlan Ayuby, Emily Grace Benda,Michael David Bottrill, Tristan James Cook, Kae Ken Foo,Rhys Matthew Jones, Kenneth Kegan Kariuki,Calvin Fu Cherng Khor, Binwei Liu, Chao Pan, Hiu Yan Tsang,Jacob Anderson Whittington
Supervisors Dr Matthew Tetlow, Assoc. Prof. Ben Cazzolato,Dr David Harvey, Dr Min Kwan Kim,Assoc. Prof. Andrei Kotousov, Dr Tommy Liddy, Dr Zebb Prime
The QB50 project is a collection of fifty independently designed micro-satellites (calledCubeSats) being coordinated by the von Karman Institute in Belgium. SUSat is onesuch satellite, in development at the University of Adelaide in collaboration with theUniversity of South Australia. This exhibition is presented by five teams from withinthe SUSat project; four of these teams are responsible for the design of the followingCubeSat subsystems; the attitude determination and control system (ADCS), the elec-trical power system (EPS), the physical structure of the satellite and an experimentalGPS science payload. The ADCS controls the steering of the satellite. The EPS is
17
responsible for the generation and distribution of power within the satellite. The struc-ture contains and protects the other satellite subsystems. Lastly, the GPS payloadwill measure atmospheric species using pseudorange. The fifth team is responsiblefor the systems engineering of the whole SUSat project using model-based systemsengineering principles. This is the first year of the SUSat project, with launch currentlyscheduled for 2015. Thus, the project is still in the design stage, and the groups willbe exhibiting the research and design that has been completed to date.
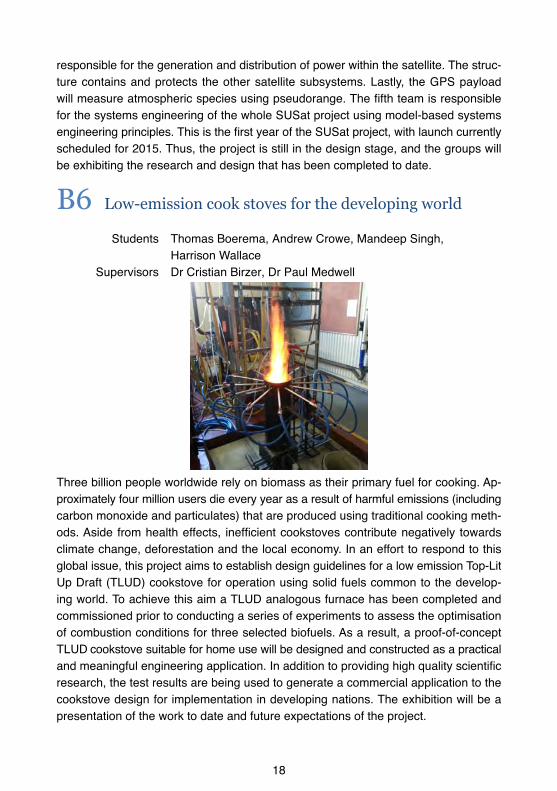
B6 Low-emission cook stoves for the developing world
Students Thomas Boerema, Andrew Crowe, Mandeep Singh,Harrison Wallace
Supervisors Dr Cristian Birzer, Dr Paul Medwell
Three billion people worldwide rely on biomass as their primary fuel for cooking. Ap-proximately four million users die every year as a result of harmful emissions (includingcarbon monoxide and particulates) that are produced using traditional cooking meth-ods. Aside from health effects, inefficient cookstoves contribute negatively towardsclimate change, deforestation and the local economy. In an effort to respond to thisglobal issue, this project aims to establish design guidelines for a low emission Top-LitUp Draft (TLUD) cookstove for operation using solid fuels common to the develop-ing world. To achieve this aim a TLUD analogous furnace has been completed andcommissioned prior to conducting a series of experiments to assess the optimisationof combustion conditions for three selected biofuels. As a result, a proof-of-conceptTLUD cookstove suitable for home use will be designed and constructed as a practicaland meaningful engineering application. In addition to providing high quality scientificresearch, the test results are being used to generate a commercial application to thecookstove design for implementation in developing nations. The exhibition will be apresentation of the work to date and future expectations of the project.
18

B7 Laser based composite damage detection
Student Jaye GearySupervisors Dr. John Codrington, Dr Stewart Wildy
Composites materials have seen widespread use in many applications, such as inaircraft, pipelines and sporting goods. Like any other material, composites have theirlimits and can be damaged while in use (e.g. delamination or matrix cracking) due tooverloading and fatigue. To prevent catastrophic failure of a structure or component,damage detection techniques are employed to find and quantify damage in the mate-rial. This project developed a damage detection technique, based on the principles ofsolid mechanics and the equation of motion, capable of assessing delamination dam-age in laminate plates and shells. Finite element methods were used to evaluate theaccuracy of the damage detection technique. The results were also validated experi-mentally with scanning laser Doppler vibrometery and a custom designed shaker rig.The technique can successfully localise and determine the extent of damage withinlaminate beams and plates.
B8 Son of Bluebottle (BlueBottle Mk 2)
Students Sarah Cirillo, James JollySupervisors Assoc. Prof. Colin Kestell, Dr Steven Grainger
Sponsors The University of Adelaide, SME Co. Pty Ltd, LAI Industries PtyLtd
Autonomous Underwater Vehicles (AUVs) are continually evolving to provide saferand alternative ways to access the world below the surface, from deep sea explo-ration to asset management and costal conservation. The Son of Bluebottle, or Blue-bottle MkII, stems from the initial Bluebottle project from 2011, which was followed byan additional project in 2012 for an autonomous control and navigation system. Themain goal of Bluebottle was to monitor the environment surrounding the wave energygeneration platform of the sponsor, WaveRider Energy. Whilst very agile it still had at-tributes that limit its performance, those being its weight and limited manoeuvrabilitywith respect to time and movement sequence.
The aim for this project is to design and engineer a vehicle specifically for the ad-vancement of research of control systems for AUVs. To achieve this it is envisioned thevehicle will have direct control in six degrees of freedom. The project has undertakenbenchmarking of commercial and recreational AUVs; focusing on the design of thesystem to enhance control capabilities for various conditions and requirements. Dur-ing this exhibition we will be displaying the designed and manufactured AUV alongsidea simulated model of the proposed final design.
19

B9 Sound directivity from high temperature exhaust stacks
Student Linjun ZhaoSupervisors Assoc. Prof. Ben Cazzolato, Mr Will Robertson,
Prof. Colin HansenThe simple cycle gas turbine system is frequently used to meet the peak load re-quirements for the electricity market. These simple cycle gas turbines emit very hotgases into the environment through a stack. Evidence has shown that these simplecycle gas turbines often increase sound levels in the community, and almost alwaysexceed predictions. The aim of this project is to understand the influence that the hotgas flow through exhaust stacks has upon acoustic radiation. This project focuseson testing the hypothesis via experiments that the hot, fast flowing gases refract thesound downwards. A rig has been designed and built in this project to test this hypoth-esis. It is comprised of a flow and heat generator, a loudspeaker, a microphone arrayand a data collector. Incidental equipment such as thermocouples used to measuretemperature and differential pressure transducers to measure flow rate are also em-ployed. To measure the directivity of the sound, experimental testing is conducted inthe Anechoic Chamber at the University of Adelaide. The completed testing rig, rela-tive test devices and analysis facilities will be presented. The result of test includingfinal collected data and analysis method will be demonstrated.
C1 A fast but safe keg handling system for a traditionalhotel with cellar storage
Student David McMurraySupervisors Dr Antoni Blazewicz, Assoc. Prof. Colin Kestell
During the last century working conditions have steadily improved in many westerneconomies. Legislation has compelled change upon industries where manual han-dling tasks and related injuries were once the norm. The improved safety and qualityof working lives has often been realized by the implementation of mechanical aids.However, the manual handling of beer kegs in traditional hotels, where keg entry isvia a cellar, continues to be a high risk task. This project offers a solution.
The selected design uses two conveyors in a V formation to increase the frictionforce applied to the keg such that slip is prevented at a much steeper angle thanwould otherwise be possible which allows for a more space efficient design. The con-veyor angles and belt material were selected after running a number of slip tests. Theelectrical system includes a variable frequency speed control such that a safety andefficiency can be optimised for different conditions, for example incoming full kegsversus outgoing empties as well as catering for different confidence levels betweenusers. This exhibition will demonstrate the design and progress to date.
20

C2 Dielectric barrier discharge (DBD) non-thermalmicro-plasma source
Students Soon Yii Chua, Sean RooneySupervisor Dr Min Kwan Kim
Non-thermal plasma is a relatively new technology with potential applications withinbiomedical and aerospace engineering. This project aims to design and build an atmo-spheric non-thermal micro-plasma source using Dielectric Barrier Discharge (DBD),and demonstrate the feasibility of non-thermal plasma applications in areas such asmicro-thruster and plasma medicine. The project goals extend to demonstrate thesterilizing ability of the plasma and survivability of living species from the plasma treat-ment. The micro-plasma source is operated using an inert gas supply and a pulsed-DC power source, supplied by a 240V AC socket or by 12 volt batteries. A series ofexperiments were conducted including successful generation of cold plasma, verifica-tion of its temperature, optimising the plasma flow, sterilisation test and survivabilityof living species from the plasma treatment. The project hopes to initiate future re-search into physical properties of atmospheric plasma and to broaden understandingof non-thermal plasma, such as the physical behaviour and plasma-surface interac-tion. The exhibition features demonstration of plasma generation, demonstration ofplasma interaction with different items, and findings from experiments.
C3 Cyclist CdA measurement in the wind tunnel and on thetrack
Students Matthew Earl, Tom AlfordSupervisor Assoc. Prof. Richard Kelso
Investigating cyclingCDA (drag coefficient multiplied by the effective frontal area) en-ables optimisation of the power output/ aerodynamic drag relationship and improvedcycling performance. The major objective of this project is to develop a system whichcan be used to collect CDA measurements for elite track cyclists in the Thebartonwind tunnel. These measurements are used to verify the on-track CDA measure-ments collected by the AIS/CA using a power output algorithm. Successful comple-tion of the project requires the design and construction of a wind tunnel testing rig andwind tunnel research to collect CDA measurements to verify the on track data. Thewind tunnel rig design must simulate real track cycling conditions and enable accu-rate results to be collected, whilst having a simple design which can accommodateany rider/bicycle size and allow easy disassembly. These criteria are met by splittingthe design into subsystems: a force plate and data acquisition capable of recordingaccurate CDA measurements, an aerodynamic shroud to create a fully developed re-alistic flow over the cyclist and finally a rollers/resistance subsystem which promotesa genuine body position and pedalling effort.
21

C4 Autonomous robot for mapping soil properties
Students Muhammad Muhaimin Hasnuden, Mohd Muizz Mohd Zaki,Sebastien Tiburzio
Supervisor Dr Tien-Fu Lu
Precision farming is an emerging trend driving the agricultural industry to greater sus-tainability through the micromanagement of farmland, resulting in greater yields andreduced resource wastage. A key requirement for this is detailed data about the soilproperties over areas of interest, which can be expensive and time consuming to col-lect manually. This project was undertaken to attempt to address this issue by devel-oping an autonomous mobile robot to navigate around a piece of farmland, stoppingat numerous locations and using portable sensors to collect data about moisture con-tent, temperature, acidity and nutrient levels. Once this data has been gathered, it canthen be processed into a map of the soil properties in that area, which could facilitateprecision agriculture activities such as targeted fertilisation and watering. The exhi-bition for this project will include a presentation of the outcomes and demonstrationsof aspects of the prototype device, including its navigation and obstacle avoidancesystems, the mechanical soil testing rig and the novel portable nutrient measurementdevice that was designed.
C5 Inverse modelling of pollutant dispersion
Students Mr. Yunze Wang, Mr. Jiuzhou ZhangSupervisors Dr Zhao Tian, Dr Tien-Fu Lu, Mr Mohamed Awadalla
This project is aiming to use inverse modeling to localize and trace the contaminantsources and propagations. There are an increasing number of passengers under-taking air travel on commercial airliners throughout the world annually. Any pollutantsources can be found in both indoor and outdoor environment. A commercial airlinecould fly varying from 1 to 20 hours. During this time period, passengers are exposedto any contaminant source that may exist in the cabin air. Due to high occupant den-sity and long exposure time, pollutant sources could have serious impacts and threatsto the health of passengers. It’s important to locate the primary contaminant sourcesin order to control the spread of pollutant. This project therefore uses CFD to simulatethe air fluid and contaminant transmission system in the aircraft cabin and developsprogram with artificial intelligence algorithm(s) which is able to trace and localize pol-lutant source as well as identifying the possibilities of passengers being affected bythe containment under the concept of inverse modeling. During the exhibition, thesoftware will be demonstrated on the PC that how it is used to perform the tracing.
22
D1 Omnibot
Students David Skene, David Sowerbutts, Peter SvensdotterSupervisor Dr. Ley Chen
Sponsor Pepperl+Fuchs
Vehicles using conventional wheels have limited mobility, being only able to drive for-ward, backward and rotate. In contrast, our Mecanum-wheeled robot can move in anyplanar direction, extending typical manoeuvrability to include the left and right direc-tions. This eliminates the need for a turning circle and allows the robot to negotiate90 degree corners in a single orientation. In order to create this robot, appropriatehardware was selected and incorporated, and driving software and control systemswere developed. The completed system facilitates command following under manualcontrol from a user operated gamepad or commands through the created graphicaluser interface. Obstacle detection and collision avoidance has also been implementedusing a 2 dimensional LIDAR from Pepperl+Fuchs. This scanner has also been usedfor map generation. We have also established the groundwork for future work in au-tonomy and further mapping capabilities. Progressive development of this project haspreviously been presented at Science Alive and the University of Adelaide Open Day.This exhibition will give a detailed look at the developed system and its functionality.
23
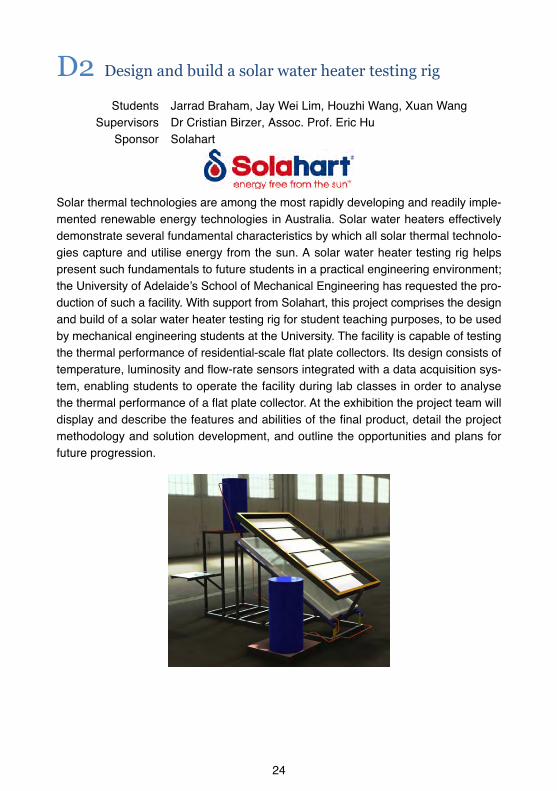
D2 Design and build a solar water heater testing rig
Students Jarrad Braham, Jay Wei Lim, Houzhi Wang, Xuan WangSupervisors Dr Cristian Birzer, Assoc. Prof. Eric Hu
Sponsor Solahart
Solar thermal technologies are among the most rapidly developing and readily imple-mented renewable energy technologies in Australia. Solar water heaters effectivelydemonstrate several fundamental characteristics by which all solar thermal technolo-gies capture and utilise energy from the sun. A solar water heater testing rig helpspresent such fundamentals to future students in a practical engineering environment;the University of Adelaide’s School of Mechanical Engineering has requested the pro-duction of such a facility. With support from Solahart, this project comprises the designand build of a solar water heater testing rig for student teaching purposes, to be usedby mechanical engineering students at the University. The facility is capable of testingthe thermal performance of residential-scale flat plate collectors. Its design consists oftemperature, luminosity and flow-rate sensors integrated with a data acquisition sys-tem, enabling students to operate the facility during lab classes in order to analysethe thermal performance of a flat plate collector. At the exhibition the project team willdisplay and describe the features and abilities of the final product, detail the projectmethodology and solution development, and outline the opportunities and plans forfuture progression.
24

D3 Maximising power output of a sprint kayaker
Students Benjamin Day, Jack King, Amy Lewis, Timothy SymondsSupervisors Mr Will Robertson, Ami Drory
Sprint kayaks are equipped with a set of rails allowing the athlete to adjust seatingheight and angle. Sitting higher in the boat has been found to put the body in a morepowerful position, but can also make the athlete more unstable. Such instability oftenresults in a decrease of stroke efficiency, requiring the athlete to find a comfortablebalance to maximise performance. Kayaking athletes do not currently have a quan-tifiable method of determining this optimal seating position.
This project consists of three distinct stages to best evaluate the influence of seat-ing position on the kayaker’s power output. Firstly mechanical modifications weremade to a kayak ergometer such that it was capable of replicating lateral instability,typical of what a kayaker would experience on-water. The ergometer was fully instru-mented in order to determine output power during paddling as well as other importantpaddling variables. Finally, a computer simulation was developed to be validated bythe instrumented ergometer, which has the capacity to present some of the internalbiomechanics required for the athlete’s stroke. At the exhibition you can gain a first-hand experience of the comparisons between the modified ergometer and a traditionalfixed ergometer, whilst having performance variables analysed.
D4 Jet flame modelling
Student Michael EvansSupervisors Dr Paul Medwell, Dr Zhao Tian
The contemporary world is dependent on combustion. From electricity generation, tojet engines, combustion has shaped the technology of the modern era. Despite itsversatility, conventional combustion produces unwanted nitrogen oxides (NOx) pollu-tants, emits soot and generates flame noise. These undesirable environmental reper-cussions may be minimised, or eliminated, through more thermally efficient operationin the Moderate or Intense Low oxygen Dilution (MILD) combustion regime. To de-velop practical systems employing MILD combustion, researchers within the Schoolof Mechanical Engineering developed the Jet in Hot Coflow (JHC) burner to ascertaina fundamental understanding of this unique combustion regime.
Computational fluid dynamics (CFD) models have been sought as a design tool forin the development of improved combustion systems and to complement experimentalresearch into MILD combustion mechanics. Combustion simulations are inherentlycomplex, requiring physically accurate models of turbulence, chemical reactions and,with particular importance for MILD combustion, turbulence-chemistry interactions.
25

An accurate model of turbulent jet flames in low oxygen conditions resembling MILDcombustion has been pursued, and validated against experimental data measured inthe JHC. The new model shows superior agreement compared to previous modellingattempts under select conditions, and the exhibition will present these results.
CH Radical Number Density compared to photographicmeasurements of an Ethylene/Nitrogen Jet Flame.Photo from Medwell, P.R., Kalt, P.A.M. & Dally, B.B.2008. Imaging of diluted turbulent ethylene flames sta-bilized on a jet in hot coflow (JHC) burner. Combustionand Flame 152, 100–113.
D5 BlueBottle autonomous submarine navigation andcontrol
Students Jingjie Wu, Jiming ZhangSupervisors Dr Steven Grainger, Assoc. Prof. Colin Kestell
The exhibition will demonstrate the development of the BlueBottle subsystems and thedevelopments to the internal chassis. Autonomous Underwater Vehicles (AUVs) areat the forefront of scientific underwater exploration and tasks involving underwaterexploration and equipment inspection can now be done autonomously. An AUV isan untethered, submersible vehicle that can be programmed to complete underwatertasks utilising on board navigation and information systems.
BlueBottle Navigation and Control 2014 aims to navigate the BlueBottle in openwaters and provide visual and acoustic environmental monitoring. Inertial navigation,acoustic distance determination and control algorithms are being developed. Addi-tional sensors incorporated in 2013 include a pressure-based depth sensor and in-clinometer to assist in determining position and orientation, which are essential toautonomous navigation.
26

E1 Compressed air vehicle
Students Gerry Mavrogiannis, Huon Payne, Marko Peterkovic,Brock Pettigrove, Sam Arnold
Supervisors Dr Antoni Blazewicz, Assoc. Prof. Colin KestellSponsors Automotive Safety Engineering (ASE), EngineAir Pty Ltd., City
Hydraulic, Chubb Fire & Safety, Kart Mania
Compressed air as a fuel source is an emerging technology currently being imple-mented to vehicles in an attempt to produce a zero-emission propulsion system. Thisaims to combat rising greenhouse gas emissions from conventional fossil fuel oper-ated vehicles, through the design of Compressed Air Vehicles (CAVs) which may be aviable alternative. Air is delivered to an air motor from storage tanks, via a pneumaticnetwork, resulting in the conversion of potential energy to mechanical work.
In the exhibition, a Compressed Air Go-Kart (CAGK) is demonstrated. This vehiclehas been designed and tested and provides a preliminary study of potential applica-tion of compressed air fuel technologies to larger vehicles. The design includes a com-plete integration of sub-system designs, construction and optimisation of all systems.Using a commercially available go-kart as a basis, the CAGK produces comparableresults in regards to performance, viability, whilst also focusing on safety aspects ofthe design. Conclusions have been drawn from the acquired results, regarding thefeasibility of compressed air as a fuel source, and its potential for further developmentand application in the future.
27
E2 Design and build a hybrid renewable energy production,storage and management system for householdapplication
Students Sean Ng, Ashley Phan and Lam-Thien VuSupervisors Dr Maziar Arjomandi, Dr Cristian Birzer
With electricity prices continually rising in South Australia, an energy managementsystem (EMS) under an hourly pricing method was designed to alleviate householdelectricity bills. Hybridisation through electricity production and storage, which is in-corporated in the EMS, will be used to further assist in this reduction. The wholesaleprice of electricity is dynamic, but households pay a flat rate on their electricity billsbased on the total amount of electricity consumed. An hourly pricing method is anoption that would better reflect the wholesale price trends. It provides a financial in-centive for households to reduce their consumption in peak periods by offering pricesthat reflect the current demand and supply of electricity. The EMS will automaticallyshift appliance usage and manage the solar PV system and storage device to takeadvantage of these varying prices.
The project required the development of an average household electricity con-sumption profile and the prediction of retail hourly prices based on 2012/13 financialyear wholesale prices. Furthermore, financial assessment of the management systemhas been conducted for the shifting of domestic electricity usage, and household elec-tricity production and storage. The aforementioned ideas were then integrated and itwas found that significant savings can be made by adopting this system. A graphicaluser interface will be used to demonstrate the EMS.
E3 Scuba suit warmer
Students Manraj Singh Mann Bhupinder Singh, Andreas Pettifer,Sarah Wentworth
Supervisor Dr Erwin GamboaWater has a higher thermal conductivity coefficient than air. A diver will therefore losea significant amount of heat to the underwater environment reducing exploration time.This project determined the feasibility of extending dive time by delivering heat to thediver. A recreational diver protects themselves from heat loss by donning a neoprenesuit. These suits provide adequate protection in moderate water, however in coolerwater greater amounts of heat are lost. This reduces dive times as the lost heat leadsto discomfort, loss of dexterity in fingers and toes, and eventually hypothermia. Currentsolutions of heated wetsuits are unsuitable for diving and are expensive and Thisproject designed a prototype which provided heat to a diver thus allowing extendingdive times, with a retail cost under $400.
28
The project was divided into four major subsystems; heating element, controls,power source and material. Tests were conducted to determine the feasibility of se-lected components. Heating element was tested in both air and in water to determinethe power output. Power supply was tested to determine the capacity and operationtime. Scalability of the control system was determined. The results were compared tothe restrictions and goals set at the beginning of the project regarding the power, costand operation time requirements for the device. This exhibition shows the final devicein its functioning capacity.
E4 Design and test a lift type vertical axis wind turbine
Students Angus McLaren, Daniel Springham, David Freund,Jarrad Wade, Steven Pfennig, Timothy Dow
Supervisors Dr Maziar Arjomandi, Dr Timothy LaoSponsors Toolcraft, LJF Technical Services, Fyfe, Prince Alfred College,
Carbon Fiber Australia
MECHANICAL EXPO EXTRACT Project number: 1433 Project title: Design & Test a Lift-type Vertical Axis Wind Turbine Students' names: Angus McLaren, Daniel Springham, David Freund, Jarrad Wade, Steven Pfennig, Timothy Dow Supervisors' names: Dr Maziar Arjomandi, Dr Timothy Lao Sponsors: Toolcraft, LJF Technical Services, Fyfe, Prince Alfred College Sponsor Logos:
MECHANICAL EXPO EXTRACT Project number: 1433 Project title: Design & Test a Lift-type Vertical Axis Wind Turbine Students' names: Angus McLaren, Daniel Springham, David Freund, Jarrad Wade, Steven Pfennig, Timothy Dow Supervisors' names: Dr Maziar Arjomandi, Dr Timothy Lao Sponsors: Toolcraft, LJF Technical Services, Fyfe, Prince Alfred College Sponsor Logos:
MECHANICAL EXPO EXTRACT Project number: 1433 Project title: Design & Test a Lift-type Vertical Axis Wind Turbine Students' names: Angus McLaren, Daniel Springham, David Freund, Jarrad Wade, Steven Pfennig, Timothy Dow Supervisors' names: Dr Maziar Arjomandi, Dr Timothy Lao Sponsors: Toolcraft, LJF Technical Services, Fyfe, Prince Alfred College Sponsor Logos:
MECHANICAL EXPO EXTRACT Project number: 1433 Project title: Design & Test a Lift-type Vertical Axis Wind Turbine Students' names: Angus McLaren, Daniel Springham, David Freund, Jarrad Wade, Steven Pfennig, Timothy Dow Supervisors' names: Dr Maziar Arjomandi, Dr Timothy Lao Sponsors: Toolcraft, LJF Technical Services, Fyfe, Prince Alfred College Sponsor Logos:
With the increasing popularity of renewable energy and wind power in particular, it isdesirable to implement small-scale wind turbine technology in urban areas. However,horizontal axis wind turbines are unable to perform efficiently in such an environment,and alternative turbine technologies must be sourced. Darrieus and Savonius verticalaxis wind turbines (VAWTs) are better suited to urban environments but individually,each has its limits — the Darrieus is efficient at high speeds but is unable to self-start,while the Savonius can self-start but is comparatively less efficient at high speeds.Additionally, Darrieus VAWTs can take advantage of passive, or mechanically actuatedblade pitch control to further improve its performance.
This project focussed on the design, build, and test of a high-efficiency hybridVAWT for use in urban environments. The VAWT incorporates Savonius, Darrieus,and passive pitch control technologies to overcome the disadvantages of each. Thedesigns and performance of existing VAWTs were reviewed to help develop a conceptdesign. Stream-tube modelling was then used to refine the concept and a final designwas reached. Once the VAWT was built, testing was undertaken to analyse the ef-fectiveness of the passive pitch control and the Savonius as a start-up mechanism.
29
This exhibition will display the project’s results, along with future improvements andpotential market viability.
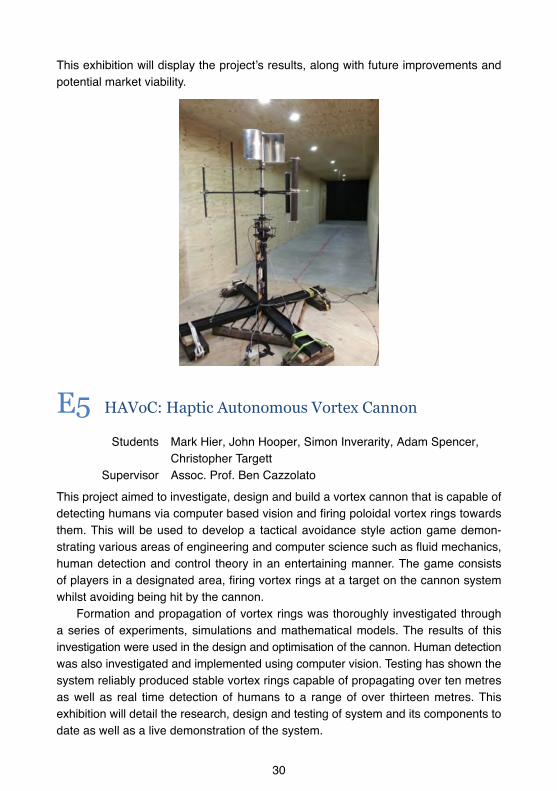
E5 HAVoC: Haptic Autonomous Vortex Cannon
Students Mark Hier, John Hooper, Simon Inverarity, Adam Spencer,Christopher Targett
Supervisor Assoc. Prof. Ben CazzolatoThis project aimed to investigate, design and build a vortex cannon that is capable ofdetecting humans via computer based vision and firing poloidal vortex rings towardsthem. This will be used to develop a tactical avoidance style action game demon-strating various areas of engineering and computer science such as fluid mechanics,human detection and control theory in an entertaining manner. The game consistsof players in a designated area, firing vortex rings at a target on the cannon systemwhilst avoiding being hit by the cannon.
Formation and propagation of vortex rings was thoroughly investigated througha series of experiments, simulations and mathematical models. The results of thisinvestigation were used in the design and optimisation of the cannon. Human detectionwas also investigated and implemented using computer vision. Testing has shown thesystem reliably produced stable vortex rings capable of propagating over ten metresas well as real time detection of humans to a range of over thirteen metres. Thisexhibition will detail the research, design and testing of system and its components todate as well as a live demonstration of the system.
30
E6 Formula Vee fuel injection system
Students Joshua Ames, Luke Air, Thomas Carpinelli, Michael King,Andrew Lloyd
Supervisor Mr Gareth BridgesSponsor Formula Vee
Formula Vee is a highly controlled motor racing category, in which a strong focus isplaced on driver ability. Due to this focus, minimal vehicle modifications are permittedand the specifications have remained relatively unchanged since the category wasintroduced in 1965. As a result, an out-dated carburettor fuel delivery system is still inplace, discouraging many potential younger competitors. In an effort to maintain thepopularity of the racing category, the Formula Vee Association of Australia in cooper-ation with the University of Adelaide has begun an initiative to modernise the categorythrough the development of a custom electronic fuel injection (EFI) system.
The focus of this project is to design and test an EFI system which is capable of re-liably matching the output performance of the original carburettor system, whilst ensur-ing a low set up cost for entry-level competitors. This exercise will assist in demonstrat-ing the many commercially viable benefits of electronic systems over their mechanicalcounterparts. Testing of the current Volkswagen 1600cc boxer engine fitted with thecarburettor system was undertaken using a dynamometer in order to obtain baselineperformance data. A number of design choices were analysed, with single port andmulti-port injection being selected as two options that could meet the Formula Veerequirements. The focus of the project was then the implementation of these systemsand subsequent testing for performance matching and comparison. This exhibitionwill demonstrate the progress of the project to date.
31
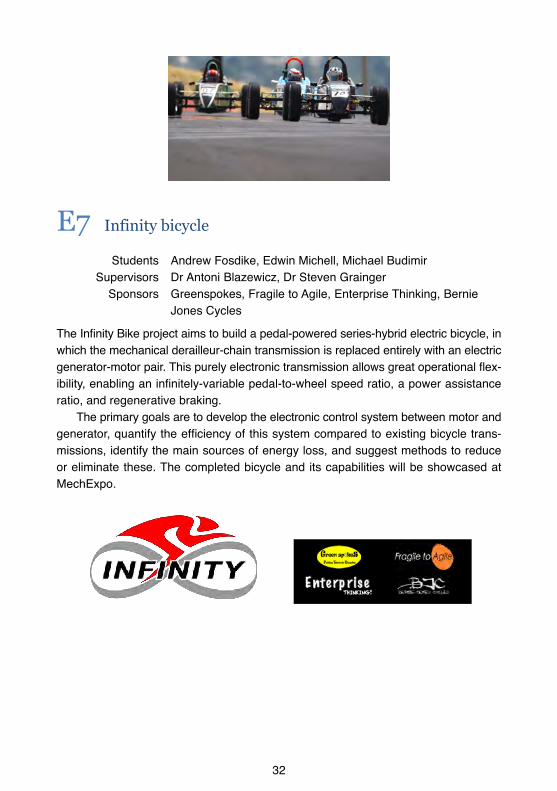
E7 Infinity bicycle
Students Andrew Fosdike, Edwin Michell, Michael BudimirSupervisors Dr Antoni Blazewicz, Dr Steven Grainger
Sponsors Greenspokes, Fragile to Agile, Enterprise Thinking, BernieJones Cycles
The Infinity Bike project aims to build a pedal-powered series-hybrid electric bicycle, inwhich the mechanical derailleur-chain transmission is replaced entirely with an electricgenerator-motor pair. This purely electronic transmission allows great operational flex-ibility, enabling an infinitely-variable pedal-to-wheel speed ratio, a power assistanceratio, and regenerative braking.
The primary goals are to develop the electronic control system between motor andgenerator, quantify the efficiency of this system compared to existing bicycle trans-missions, identify the main sources of energy loss, and suggest methods to reduceor eliminate these. The completed bicycle and its capabilities will be showcased atMechExpo.
Mechexpo Abstract:
Project Number: 1531
Project Title: Infinity Bicycle: A pedal-powered series-hybrid electric bicycle
Supervisors: Antoni Blazewicz and Steven Grainger
List of Sponsors: Greenspokes, Fragile to Agile, Enterprise Thinking, Bernie Jones
Cycles.
Students: Andrew Fosdike
Edwin Michell
Michael Budimir
Abstract:
The Infinity Bike project aims to build a pedal-powered series-hybrid electric bicycle, in
which the mechanical derailleur-chain transmission is replaced entirely with an electric
generator-motor pair. This purely electronic transmission allows great operational flexibility,
enabling an infinitely-variable pedal-to-wheel speed ratio, a power assistance ratio, and
regenerative braking.
The primary goals are to develop the electronic control system between motor and
generator, quantify the efficiency of this system compared to existing bicycle
transmissions, identify the main sources of energy loss, and suggest methods to reduce or
eliminate these. The completed bicycle and its capabilities will be showcased at
MechExpo.
Mechexpo Abstract:
Project Number: 1531
Project Title: Infinity Bicycle: A pedal-powered series-hybrid electric bicycle
Supervisors: Antoni Blazewicz and Steven Grainger
List of Sponsors: Greenspokes, Fragile to Agile, Enterprise Thinking, Bernie Jones
Cycles.
Students: Andrew Fosdike
Edwin Michell
Michael Budimir
Abstract:
The Infinity Bike project aims to build a pedal-powered series-hybrid electric bicycle, in
which the mechanical derailleur-chain transmission is replaced entirely with an electric
generator-motor pair. This purely electronic transmission allows great operational flexibility,
enabling an infinitely-variable pedal-to-wheel speed ratio, a power assistance ratio, and
regenerative braking.
The primary goals are to develop the electronic control system between motor and
generator, quantify the efficiency of this system compared to existing bicycle
transmissions, identify the main sources of energy loss, and suggest methods to reduce or
eliminate these. The completed bicycle and its capabilities will be showcased at
MechExpo.
32

E8 ASRI multi-stage launch vehicle
Students Fantai Meng, Anton Silvestri, Ryan Tang, James TranSupervisors Dr Steven Grainger, Dr Matthew Tetlow
Sponsors Australian Space Research Institute, The Sir Ross and KeithSmith Fund
The ASRI Multi-Stage Launch Vehicle (MSLV) is an extension of the Small SoundingRocket Program (SSRP) developed during the mid-1990s. As the MSLV project im-plements a 2-stage launch system, as opposed to the single-stage of the SSRP, thevehicle will be able to reach higher altitudes and speeds than the SSRP system. Cur-rently hypersonic testing requires the acquisition of American Terrier-Orion rockets,whilst the successful completion of this project will reduce Australia’s dependence onAmerica for such research activities. The designs utilise decommissioned Defenceresources, namely the Zuni and Sighter rockets. Furthermore, the MSLV can providean inexpensive development platform for aerospace equipment as it can simulate theforces and environments such apparatus would be subjected to.
The 2013 project aims to develop a Dynamically Stabilised Payload Bay (DSPB),an external communications system to relay GPS coordinates, extend the capability ofthe avionics suite as well as design and manufacture a rocket enclosure to reduce thereliance on the availability of the Woomera launch site. The exhibition will provide anoverview of current progress towards these goals, including research, developmentsand prototypes.
Project 1473: Australian Space Research Institute Multi-Stage Launch Vehicle
Supervisors: Dr Steven Grainger, Dr Matthew Tetlow
Sponsors: Australian Space Research Institute, The Sir Ross and Keith Smith Fund
Students: Fantai Meng, Anton Silvestri, Ryan Tang & James Tran
The ASRI Multi-Stage Launch Vehicle (MSLV) is an extension of the Small Sounding Rocket Program
(SSRP) developed during the mid-1990s. As the MSLV project implements a 2-stage launch system,
as opposed to the single-stage of the SSRP, the vehicle will be able to reach higher altitudes and
speeds than the SSRP system. Currently hypersonic testing requires the acquisition of American
Terrier-Orion rockets, whilst the successful completion of this project will reduce Australia’s
dependence on America for such research activities. The designs utilise decommissioned Defence
resources, namely the Zuni and Sighter rockets. Furthermore, the MSLV can provide an inexpensive
development platform for aerospace equipment as it can simulate the forces and environments such
apparatus would be subjected to.
The 2013 project aims to develop a Dynamically Stabilised Payload Bay (DSPB), an external
communications system to relay GPS coordinates, extend the capability of the avionics suite as well
as design and manufacture a rocket enclosure to reduce the reliance on the availability of the
Woomera launch site. The exhibition will provide an overview of current progress towards these
goals, including research, developments and prototypes.
Project 1473: Australian Space Research Institute Multi-Stage Launch Vehicle
Supervisors: Dr Steven Grainger, Dr Matthew Tetlow
Sponsors: Australian Space Research Institute, The Sir Ross and Keith Smith Fund
Students: Fantai Meng, Anton Silvestri, Ryan Tang & James Tran
The ASRI Multi-Stage Launch Vehicle (MSLV) is an extension of the Small Sounding Rocket Program
(SSRP) developed during the mid-1990s. As the MSLV project implements a 2-stage launch system,
as opposed to the single-stage of the SSRP, the vehicle will be able to reach higher altitudes and
speeds than the SSRP system. Currently hypersonic testing requires the acquisition of American
Terrier-Orion rockets, whilst the successful completion of this project will reduce Australia’s
dependence on America for such research activities. The designs utilise decommissioned Defence
resources, namely the Zuni and Sighter rockets. Furthermore, the MSLV can provide an inexpensive
development platform for aerospace equipment as it can simulate the forces and environments such
apparatus would be subjected to.
The 2013 project aims to develop a Dynamically Stabilised Payload Bay (DSPB), an external
communications system to relay GPS coordinates, extend the capability of the avionics suite as well
as design and manufacture a rocket enclosure to reduce the reliance on the availability of the
Woomera launch site. The exhibition will provide an overview of current progress towards these
goals, including research, developments and prototypes.
E9 Aerodynamic characteristics of Australian Rulesfootballs
Students Jason Cavuoto, Lachlan Earl, Thomas FahySupervisors Assoc. Prof. Richard Kelso, Dr Cristian Birzer
Sponsors Sherrin, Burley Sekem
Australian Rules football is traditionally associated with three main football manufac-tures; Sherrin, Burley and Faulkner. Each manufacturer is associated with a differentleague and each uses different methods of construction. As a result, perceptions havebeen formed about the different behaviours of each ball when travelling through the air.This project provides comparative aerodynamic data for competition balls produced by
33
each manufacturer to aid the relatively new notion of standardising Australian RulesFootballs. The comparative data contains characteristics of each manufacturer’s prod-uct that play significant roles in the aerodynamic behaviours of the balls throughouta game. In this project the aerodynamic characteristics of the balls were determinedthrough the use of the University’s KC wind tunnel. Each ball was placed within the testsection and tested at typical ball speeds experienced during match play. The data wasaccumulated with the aid of a load cell and processed to determine the coefficients oflift and drag as well as the side forces imparted on the ball. In addition to the quantita-tive data, flow visualisation will be used to help illustrate and interpret any differencesbetween the balls’ aerodynamic characteristics.
F1 Intelligent maritime UAV catapult robot, detection &tracking using Fast SLAM: A feasibility study
Students David Burns, Lee Lawson and Christopher MorrisonSupervisors Assoc. Prof. Amir Anvar,
Dr Andrew Knight (DSTO) and Ms Susan Cockshell (DSTO)Sponsor The Defence Science and Technology Organisation (DSTO)
The safety of members of the Australian Defence Force is of paramount concern, andone that requires constant improvement. This is particularly true for the harsh and un-predictable oceanic environments encountered by the Royal Australian Navy. A majorsafety concern is the inherent risks that are associated with manned flights dispatchedfrom surface navy vessels. As such, there has been considerable emphasis placedon the research and development of automated Unmanned Aerial Vehicles (UAVs).Due to the space constraints enforced by the surface-vessels, a maritime UAV mustalso be designed in conjunction with compact launching and recovery systems. Thisexhibition will present the findings of an investigation into the feasibility of a MaritimeUAV robot with projectile launcher and recovery system, through the integration andenhancement of current existing systems and the design of new structures. In this ex-hibition we will also present the potential future applications of the UAV, including the
34
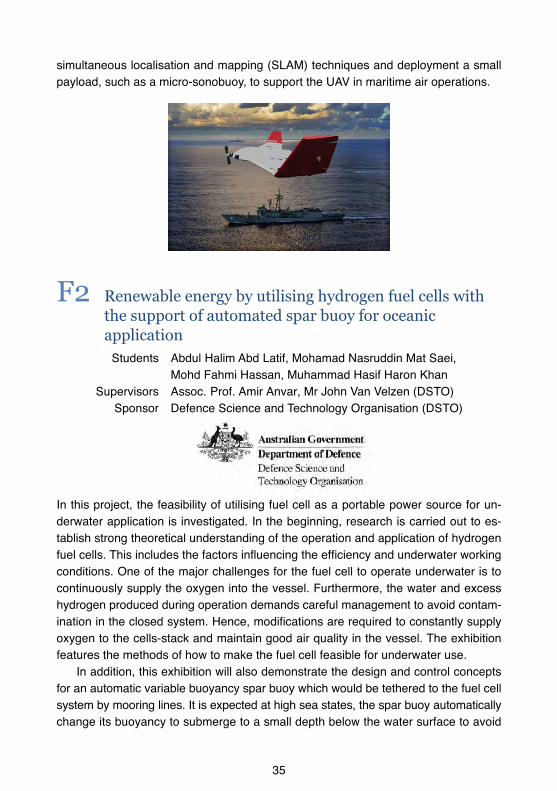
simultaneous localisation and mapping (SLAM) techniques and deployment a smallpayload, such as a micro-sonobuoy, to support the UAV in maritime air operations.
F2 Renewable energy by utilising hydrogen fuel cells withthe support of automated spar buoy for oceanicapplication
Students Abdul Halim Abd Latif, Mohamad Nasruddin Mat Saei,Mohd Fahmi Hassan, Muhammad Hasif Haron Khan
Supervisors Assoc. Prof. Amir Anvar, Mr John Van Velzen (DSTO)Sponsor Defence Science and Technology Organisation (DSTO)
In this project, the feasibility of utilising fuel cell as a portable power source for un-derwater application is investigated. In the beginning, research is carried out to es-tablish strong theoretical understanding of the operation and application of hydrogenfuel cells. This includes the factors influencing the efficiency and underwater workingconditions. One of the major challenges for the fuel cell to operate underwater is tocontinuously supply the oxygen into the vessel. Furthermore, the water and excesshydrogen produced during operation demands careful management to avoid contam-ination in the closed system. Hence, modifications are required to constantly supplyoxygen to the cells-stack and maintain good air quality in the vessel. The exhibitionfeatures the methods of how to make the fuel cell feasible for underwater use.
In addition, this exhibition will also demonstrate the design and control conceptsfor an automatic variable buoyancy spar buoy which would be tethered to the fuel cellsystem by mooring lines. It is expected at high sea states, the spar buoy automaticallychange its buoyancy to submerge to a small depth below the water surface to avoid
35

any possible damages to the system. In this case the spar buoy will act as an auto-mated positioning device to support undersea renewable energy system that wouldbe used for oceanic underwater scenarios.
Abstract: In this project, the feasibility of utilising fuel cell as a portable power source for underwater application is investigated. In the beginning, research is carried out to establish strong theoretical understanding of the operation and application of hydrogen fuel cells. This includes the factors influencing the efficiency and underwater working conditions. One of the major challenges for the fuel cell to operate underwater is to continuously supply the oxygen into the vessel. Furthermore, the water and excess hydrogen produced during operation demands careful management to avoid contamination in the closed system. Hence, modifications are required to constantly supply oxygen to the cells-stack and maintain good air quality in the vessel. The exhibition features the methods of how to make the fuel cell feasible for underwater use.
In addition, this exhibition will also demonstrate the design and control concepts for an automatic variable buoyancy spar buoy which would be tethered to the fuel cell system by mooring lines. It is expected at high sea states, the spar buoy automatically change its buoyancy to submerge to a small depth below the water surface to avoid any possible damages to the system. In this case the spar buoy will act as an automated positioning device to support undersea renewable energy system that would be used for oceanic underwater scenarios.
Automated Spar Buoy Automated Spar Buoy connected to Hydrogen Fuel Cell System
Automated Spar Buoy (left) and Automated spar buoy connected to submergedhydrogen fuel cell system (right).
F3 Cat falling robot lands on its feet
Students Rian Visser, Benjamin Shields,Ross Jobson and Natalie Redmond
Supervisors Mr Will Robertson, Assoc. Prof. Ben CazzolatoCats are renowned for their ability to always land on their feet. Although their body isdropped with no initial angular momentum, they are able to right themselves by creat-ing an imbalance between the moment of inertia of their front and back halves. Helixis a robot that mimics the motion and appearance of a real falling cat. When droppedupside down from any height or angular position it will rotate while falling to land onits feet. This is a novel project that was motivated by a desire to demonstrate the po-tential for bio-inspired robotics and encourage future students to pursue engineering.At this exhibition, we will present the simulation that verifies the theoretical model andan interactive demonstration of this self-righting ability.
Project 1487: Falling Cat Robot Lands on its Feet Supervisors: William Robertson and Benjamin Cazzolato Students: Rian Visser, Benjamin Shields, Ross Jobson and Natalie Redmond Cats are renowned for their ability to always land on their feet. Although their body is dropped with no initial angular momentum, they are able to right themselves by creating an imbalance between the moment of inertia of their front and back halves. Helix is a robot that mimics the motion and appearance of a real falling cat. When dropped upside down from any height or angular position it will rotate while falling to land on its feet. This is a novel project that was motivated by a desire to demonstrate the potential for bio-inspired robotics and encourage future students to pursue engineering. At this exhibition, we will present the simulation that verifies the theoretical model and an interactive demonstration of this self-righting ability.
36

F4 Direct injection retrofit to a two-stroke motorcycleengine
Students Stefan Smith, Anthony SmithSupervisors Prof. Bassam Dally, Dr Peter Kalt
Two stroke engines are in common use especially in developing countries. The con-ventional carburetion fuel system has inefficiencies and creates large amounts ofharmful emissions. This form of engine has reached mainstream use largely due toits low cost, simple construction and few moving parts. This project aims to retrofitthe two-stroke engine of a Yamaha YZ-125 racing motorcycle with a direct injectionfuel delivery system to decrease emission levels and increase fuel economy whileretaining the characteristic high power output. This project aims to demonstrate thetechnical viability of retrofitting a motorcycle engine with a direct injection system toadhere to worldwide standards in transport and motorsport. The project is in its sec-ond year, the Direct Injection system has been partially designed and implemented,however the motorcycle is not currently in an operational state. The aim this year is tocomplete this design and add a self-sufficient power system such that the motorcycleis rideable. In this exhibition, the bike will be on display including demonstrations ofthe tuning software used on a laptop.
F5 Design and test quiet high-speed jet engine nozzles
Student Henri WestellSupervisors Assoc. Prof. Con Doolan, Dr Danielle Moreau, Dr Paul Medwell
Jet engines are an indispensable part of the aerospace industry. However, a draw-back to their operation is the production of high levels of noise. Health problems suchas hypertension and cardio vascular disease have been linked to jet noise. As suchmany airports around the world have curfews imposed upon them, which limits airline
37
profitability and productivity. Reducing the noise emanating from jet engines and otherhigh-speed fluid flow applications has been a heavily researched area of acoustic en-gineering. This project aimed to develop appropriate experimental methodology anddata processing techniques to reduce noise levels associated with jet flow via passivenozzle exit profile manipulation. Nozzles of various shapes were manufactured us-ing 3D printing technology and tested using a jet noise rig, placed in a reverberationchamber. It was found that the noise reducing nozzle concepts were successful atalleviating noise levels with varying degrees of success. It was concluded that large-scale turbulence in jet flows is the predominant source of noise and passive turbulentmixing techniques are effective at reducing it. This exhibition will include interactiveexperimental jet noise comparisons and sound data processing as well as an overalleducation of jet noise, how it’s created and how it can be reduced.
F6 Design, research & development on intelligent swarmnetworking of UAVs, SUVs & AUVs for oceanicapplications
Students Daniel Baines, Jeremy Connelly, Vincent Lau, Prashant MuraliSupervisors Assoc. Prof. Amir Anvar, Dr Andrew Knight (DSTO),
Ms Susan Cockshell (DSTO)Sponsors Defence Science and Technology Organisation (DSTO),
Rockwell Automation
A swarm network coordinates multiple autonomous robots into a system that is ableto collectively complete a mutual task and can be applied to areas such as search andrescue, reconnaissance, environmental studies and surveillance. Swarm networkingsystems are modelled on biological insect colonies to mimic the interaction betweeneach member whilst undertaking a joint task. In order for a swarm to operate effi-ciently, certain levels of autonomy must be built into the system in order to simplifythe operator’s task.
The purpose of this project is to research, design and implement a Swarm Net-working System in a group of Unmanned Aerial Vehicles (UAVs) that can be applied toan Oceanic robotic community. The uniquely designed system uses a combination ofParticle Swarm Optimisation (PSO) path planning techniques, Monte Carlo localisa-
38

tion and obstacle avoidance algorithms integrated into the UAVs. These systems havebeen simulated and then tested in real time through a series of scenarios designed toreplicate real applications.
The exhibition will demonstrate the research, system architecture and overall de-sign of the robotic swarm system, simulations of individual components as well asvideo demonstrations of the autonomous tests conducted. All quadcopters will alsobe on display.
F7 Automated oceanic wave surface glider robot operations:A viability study
Students Muhammad Zainal Abidin, Zulhusmi Mohd Noor, Rizwan Talib,Afiq Johari
Supervisors Assoc. Prof. Amir Anvar, Assoc. Prof. Eric Hu, Dr Zhao TianSponsor Defence Science and Technology Organisation (DSTO)
Project 1410
Automated Oceanic Wave Surface Glider Robot Operations: A Viability Study
Students:Muhammad Zainal Abidin, Zulhusmi Mohd Noor, Rizwan Talib & Afiq Johari Supervisors: A/Prof Amir Anvar, A/Prof Eric Hu, Dr Zhao Feng Tian Sponsor: Defence Science and Technology Organisation (DSTO)
Unmanned surface vehicle (USV) Wave Glider Robot is an unmanned autonomous vehicle that is powered by ocean surface wave and solar energy. The wave glider consists of two main parts, which are surface float and underwater glider that is connected via an umbilical cord. Conceptually, the underwater glider converts the oceanic underwater current and surface wave energy into forward propulsion by utilizing the movement of its wings. In addition, the float is equipped with solar panels and rechargeable batteries that provide power to onboard navigation system and surveillance sensors as well as communication devices. The surveillance sensors collect the ocean data while the communication devices transmit information to off-board human operators. Besides that, oceanic mission scenarios will consider automatic landing of a quad-copter UAV robot on USV’s landing platform using the wave glider as a power-charging station. The exhibition features the viability study of the Automated Ocean Surface Glider Robot which is included with dynamic design and application scenarios. This exhibition will also provide an overview of up-to-date progress on the project as well as further improvements that will allow the wave surface glider to monitor and transmit information from oceanic conditions at given locations whilst permitting recharging of the quad-copter in real-time will be presented.
Unmanned surface vehicle (USV) Wave Glider Robot is an unmanned autonomousvehicle that is powered by ocean surface wave and solar energy. The wave glider con-sists of two main parts, which are surface float and underwater glider that is connectedvia an umbilical cord. Conceptually, the underwater glider converts the oceanic under-water current and surface wave energy into forward propulsion by utilizing the move-ment of its wings. In addition, the float is equipped with solar panels and rechargeablebatteries that provide power to onboard navigation system and surveillance sensors aswell as communication devices. The surveillance sensors collect the ocean data whilethe communication devices transmit information to off- board human operators. Be-sides that, oceanic mission scenarios will consider automatic landing of a quad-copter
39

UAV robot on USV’s landing platform using the wave glider as a power-charging sta-tion. The exhibition features the viability study of the Automated Ocean Surface GliderRobot which is included with dynamic design and application scenarios. This exhibi-tion will also provide an overview of up-to-date progress on the project as well asfurther improvements that will allow the wave surface glider to monitor and transmitinformation from oceanic conditions at given locations whilst permitting recharging ofthe quad-copter in real-time will be presented.
Project 1410
Automated Oceanic Wave Surface Glider Robot Operations: A Viability Study
Students:Muhammad Zainal Abidin, Zulhusmi Mohd Noor, Rizwan Talib & Afiq Johari Supervisors: A/Prof Amir Anvar, A/Prof Eric Hu, Dr Zhao Feng Tian Sponsor: Defence Science and Technology Organisation (DSTO)
Unmanned surface vehicle (USV) Wave Glider Robot is an unmanned autonomous vehicle that is powered by ocean surface wave and solar energy. The wave glider consists of two main parts, which are surface float and underwater glider that is connected via an umbilical cord. Conceptually, the underwater glider converts the oceanic underwater current and surface wave energy into forward propulsion by utilizing the movement of its wings. In addition, the float is equipped with solar panels and rechargeable batteries that provide power to onboard navigation system and surveillance sensors as well as communication devices. The surveillance sensors collect the ocean data while the communication devices transmit information to off-board human operators. Besides that, oceanic mission scenarios will consider automatic landing of a quad-copter UAV robot on USV’s landing platform using the wave glider as a power-charging station. The exhibition features the viability study of the Automated Ocean Surface Glider Robot which is included with dynamic design and application scenarios. This exhibition will also provide an overview of up-to-date progress on the project as well as further improvements that will allow the wave surface glider to monitor and transmit information from oceanic conditions at given locations whilst permitting recharging of the quad-copter in real-time will be presented.
F8 Design and build a maritime quadcopter UAV withautomation and deployment capabilities
Students Renjie Du, Ryan Harvie, Sebastian Parkitny, Toby ClarkSupervisors Assoc. Prof. Amir Anvar, Dr Andrew Knight (DSTO),
Ms Susan Cockshell (DSTO)Sponsors Defence Science and Technology Organisation (DSTO), Boeing,
Rockwell Automation, Boxline Automation
With an increasing utilisation of unmanned aerial vehicles (UAV) in maritime scenar-ios, the DSTO, Boeing, Rockwell Automation and Boxline Automation have sponsoreda project to design and build a quadcopter UAV suitable for maritime environmentsand capable of deploying a payload. A quadcopter aircraft has four rotors which pro-vide the thrust and lift required for flight, and also allow for vertical take-off and land-ing. A quadcopter has unique flight capabilities that could be beneficial in maritimeoperations such as surveillance, communications, rescue assistance, environmentalstudies and object tracking. The design and build process has involved the prelim-inary design, construction and subsystem integration of the UAV, resulting in flighttesting and performance analysis. The focus of the project is to develop an aircraftthat utilised the flight characteristics of a quadcopter to make it an asset in maritime
40
scenarios. The primary design features incorporated to achieve this include a water-proof design, the ability for take-off and landing from water, an on-board camera andmicro-sonobuoy deployment capabilities. A mechanical claw has been designed andbuilt as the deployment mechanism, which extends the UAV’s capability by support-ing various payloads. This exhibition will display the fundamentals of the quadcopterdesign, the completed aircraft and results of flight testing.
F9 Intelligent submersible thermal glider robot, systemoperations for deep-sea applications: A feasibility study
Students David Edwards, Abdul Ab GaniSupervisor Assoc. Prof. Amir Anvar
Sponsors Defence Science and Technology Organisation (DSTO), FESTOAustralia
Underwater gliders are autonomous buoyancy changing devices equipped with vari-ous sensors to aid in a number of civilian and defence applications including under-sea environmental study, Oceanographic research and etc. While studies have beenconducted on shallow waters of the Ocean, deep sea data is limited to current toolsavailable to researchers. Deep sea gliders are required in Australian waters to aida range of maritime applications and are crucial to the development of human en-deavours through the roles Oceans play on climate, natural resources, recreationalactivities and fisheries.
The Ocean is a reservoir of energy with potential to be harnessed. The designof the underwater Thermal Glider Robot seeks to extract Oceanic energy in the formof heat by utilising properties of a phase change material to produce changes in itsbuoyancy to glide through water at low speeds for high range and endurance missions.
41
The main objective of this project is to investigate the feasibility of such a system andaims to prove that the form of energy extraction is viable and has the potential to beutilised in promoting an increased knowledge of Australian Oceans for both defenceand environmental applications. The exhibition will demonstrate the designs of thermalengine that could operate within the temperatures of the thermocline.
G1 Instrumented rowing ergometer
Student James McRaeSupervisors Dr Paul Grimshaw, Dr David Bentley,
Assoc. Prof. Richard KelsoSponsor South Australian Sports Institute
Rowing ergometers are designed to simulate the motion and loads of on-water rowingand are commonly used as land based training and testing tools for beginner rowersthrough to Olympic athletes. Although rowing ergometers are effective at measuringhandle forces, they fail to take into account other forces which affect on-water boatspeed such as footplate and seat forces.
In Australia, all national rowing ergometer testing takes place on Concept 2 er-gometers which may be used in a stationary manner or on slides to allow the ergome-ter to move along a sliding axis. It is also possible for athletes to select the level ofdamping applied to the ergometer flywheel during use.
This project has successfully instrumented a Concept 2 rowing ergometer to mea-sure forces applied to the footplate and seat. The data collected, using national levelrowers, has been used to compare the differences in force application between themode of ergometer (sliding or stationary) as well as the effect of altering the drag fac-tor. This exhibition will showcase these finding as well as provide an opportunity for
42
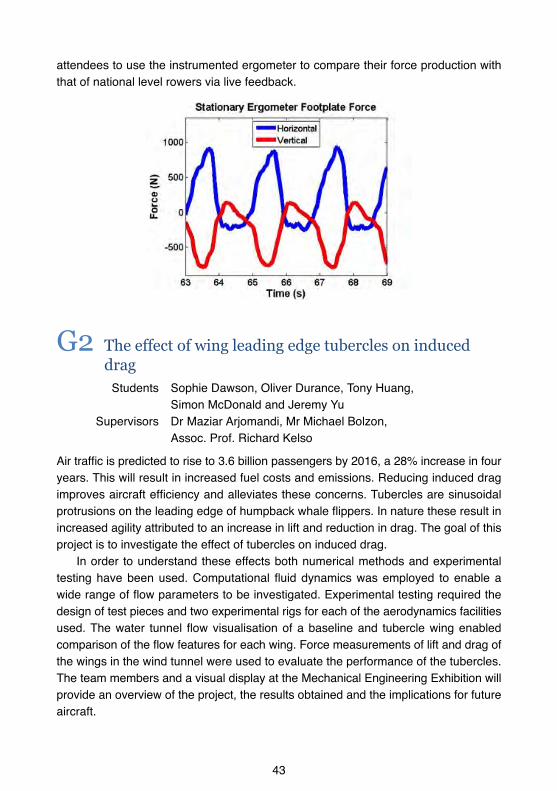
attendees to use the instrumented ergometer to compare their force production withthat of national level rowers via live feedback.
G2 The effect of wing leading edge tubercles on induceddrag
Students Sophie Dawson, Oliver Durance, Tony Huang,Simon McDonald and Jeremy Yu
Supervisors Dr Maziar Arjomandi, Mr Michael Bolzon,Assoc. Prof. Richard Kelso
Air traffic is predicted to rise to 3.6 billion passengers by 2016, a 28% increase in fouryears. This will result in increased fuel costs and emissions. Reducing induced dragimproves aircraft efficiency and alleviates these concerns. Tubercles are sinusoidalprotrusions on the leading edge of humpback whale flippers. In nature these result inincreased agility attributed to an increase in lift and reduction in drag. The goal of thisproject is to investigate the effect of tubercles on induced drag.
In order to understand these effects both numerical methods and experimentaltesting have been used. Computational fluid dynamics was employed to enable awide range of flow parameters to be investigated. Experimental testing required thedesign of test pieces and two experimental rigs for each of the aerodynamics facilitiesused. The water tunnel flow visualisation of a baseline and tubercle wing enabledcomparison of the flow features for each wing. Force measurements of lift and drag ofthe wings in the wind tunnel were used to evaluate the performance of the tubercles.The team members and a visual display at the Mechanical Engineering Exhibition willprovide an overview of the project, the results obtained and the implications for futureaircraft.
43

G3 Performance and assessment of archery bow-arrowinteraction
Students Hayden Gale, Nelson Chau, Greg GallmanSupervisors Dr. John Codrington, Assoc. Prof. Ben Cazzolato
Archery, a popular modern Olympic sport dating back centuries, relies heavily on theaccuracy and repeatability of the arrow shots fired from a bow. One of the main factorsaffecting accuracy is the setup of the bow and the arrow. There are many aspects ofthe bow setup, such as string weight, limb length and even limb material, that an archercan adjust to optimise performance; most of which are governed by well-establishedrules. However, the impact of one of the bow characteristics, that of the tiller, is poorlyunderstood. The tiller is the difference between the draw weight of the upper and lowerlimbs. Tiller values are often chosen based on anecdotal evidence and the archer’sfeel during the shot. This suggests that a deeper study of the system is warranted andtherefore forms the basis of the project.
In this exhibition we will be displaying a number of high speed videos that showour investigation into shot performance and bow vibrational characteristics from firingarrows at different tiller values. In order to achieve this objective, a functional firingmachine has been designed and constructed it will also be on display. To analyze thedynamics of the system, a finite element analysis is undertaken and a full scale modelhas been designed to show at the exbition how the bow vibrates.
G4 Design of self-cleaning surfaces
Students Chen Shen, Shuangkai Wu, Wenjun YanSupervisor Dr Zonghan Xie
Self-cleaning is a desirable function for many natural and artificial surfaces, suchas lotus leaves and windscreens. During the past decade, a deep understanding ofwater-surface interactions that render the surface water repellent has been developed.Based upon that, chemical and physical approaches have been used for preparing
44
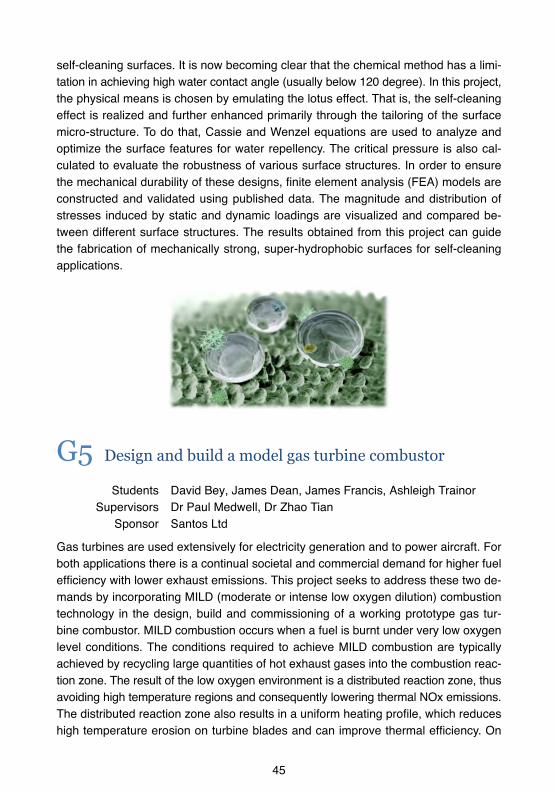
self-cleaning surfaces. It is now becoming clear that the chemical method has a limi-tation in achieving high water contact angle (usually below 120 degree). In this project,the physical means is chosen by emulating the lotus effect. That is, the self-cleaningeffect is realized and further enhanced primarily through the tailoring of the surfacemicro-structure. To do that, Cassie and Wenzel equations are used to analyze andoptimize the surface features for water repellency. The critical pressure is also cal-culated to evaluate the robustness of various surface structures. In order to ensurethe mechanical durability of these designs, finite element analysis (FEA) models areconstructed and validated using published data. The magnitude and distribution ofstresses induced by static and dynamic loadings are visualized and compared be-tween different surface structures. The results obtained from this project can guidethe fabrication of mechanically strong, super-hydrophobic surfaces for self-cleaningapplications.
G5 Design and build a model gas turbine combustor
Students David Bey, James Dean, James Francis, Ashleigh TrainorSupervisors Dr Paul Medwell, Dr Zhao Tian
Sponsor Santos Ltd
Gas turbines are used extensively for electricity generation and to power aircraft. Forboth applications there is a continual societal and commercial demand for higher fuelefficiency with lower exhaust emissions. This project seeks to address these two de-mands by incorporating MILD (moderate or intense low oxygen dilution) combustiontechnology in the design, build and commissioning of a working prototype gas tur-bine combustor. MILD combustion occurs when a fuel is burnt under very low oxygenlevel conditions. The conditions required to achieve MILD combustion are typicallyachieved by recycling large quantities of hot exhaust gases into the combustion reac-tion zone. The result of the low oxygen environment is a distributed reaction zone, thusavoiding high temperature regions and consequently lowering thermal NOx emissions.The distributed reaction zone also results in a uniform heating profile, which reduceshigh temperature erosion on turbine blades and can improve thermal efficiency. On
45
display at the exhibition is the completed prototype combustor as used in the test-ing and commissioning progress. This proof of concept combustor is approximately 3metres high and is equipped with a glass viewing pane into the combustion chamberwhere MILD combustion was observed.
H1 Biomechanics of sport climbing
Students Elsa Burnell, Nicholas Reed, Thomas SheridanSupervisors Dr Erwin Gamboa, Mr Will Robertson
The sport of rock climbing is rapidly increasing in popularity, but despite this there hasbeen little detailed research into the occurrence of stress related injuries in partici-pants. The project aimed to address this shortage by simulating a climbing environ-ment in which biomechanical force analysis could be performed during the executionof climbing manoeuvres. This analysis determined internal joint forces and torquesthroughout a climbing manoeuvre, and thus provided a knowledge base for futuremedical research.
To achieve this, a climbing environment was designed and fabricated for the sim-ulation of climbing manoeuvres in a laboratory setting. Motion capture cameras andsoftware were used to map the movement of test subjects executing these climbingmoves. The software captured three-dimensional coordinates of infra-red reflectivemarkers placed on anatomically significant landmarks. A MATLAB program was writ-ten to analyse the captured coordinates using inverse dynamics. To aid the biome-chanical analysis of climbers, a force measurement system was designed and im-
46
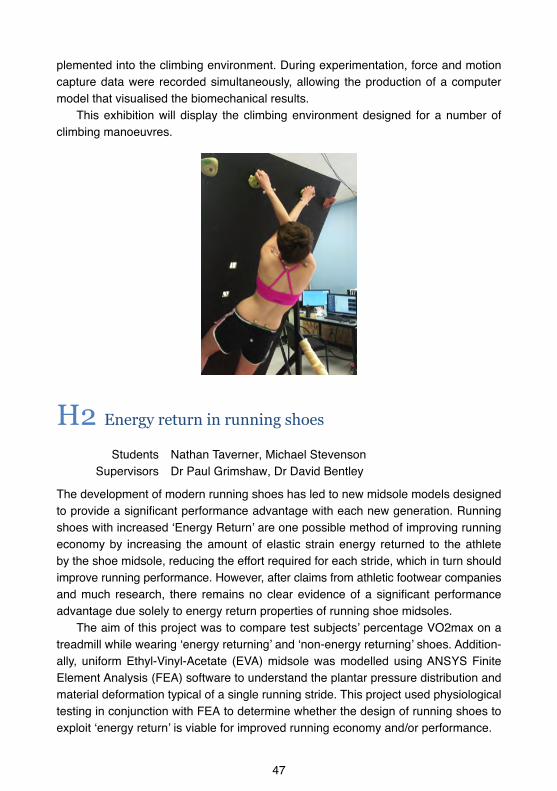
plemented into the climbing environment. During experimentation, force and motioncapture data were recorded simultaneously, allowing the production of a computermodel that visualised the biomechanical results.
This exhibition will display the climbing environment designed for a number ofclimbing manoeuvres.
H2 Energy return in running shoes
Students Nathan Taverner, Michael StevensonSupervisors Dr Paul Grimshaw, Dr David Bentley
The development of modern running shoes has led to new midsole models designedto provide a significant performance advantage with each new generation. Runningshoes with increased ‘Energy Return’ are one possible method of improving runningeconomy by increasing the amount of elastic strain energy returned to the athleteby the shoe midsole, reducing the effort required for each stride, which in turn shouldimprove running performance. However, after claims from athletic footwear companiesand much research, there remains no clear evidence of a significant performanceadvantage due solely to energy return properties of running shoe midsoles.
The aim of this project was to compare test subjects’ percentage VO2max on atreadmill while wearing ‘energy returning’ and ‘non-energy returning’ shoes. Addition-ally, uniform Ethyl-Vinyl-Acetate (EVA) midsole was modelled using ANSYS FiniteElement Analysis (FEA) software to understand the plantar pressure distribution andmaterial deformation typical of a single running stride. This project used physiologicaltesting in conjunction with FEA to determine whether the design of running shoes toexploit ‘energy return’ is viable for improved running economy and/or performance.
47

H3 Sustainable marine current energy
Students Rachel Tucker, Steven InghamSupervisors Dr Antoni Blazewicz, Dr Kristy Hansen,
Assoc. Prof. Richard KelsoSponsor SA Power Network
As society and science become increasingly aware of the harmful impact burning fossilfuels has on public health and the environment, many economies are looking to reducetheir carbon footprint through the development of clean, renewable power generation,such as Marine Current Turbines (MCT) that can be used to convert tidal energy intoelectrical energy. The major sponsor of this project is SA Power Networks. This projectexamines a horizontal axis turbine to extract kinetic energy from a free stream currentand transform it into electricity. The project team has performed a system review ofthe existing prototype and testing methodology based on research literature. Fromthis, dimensionless parameter testing of the MCT has being performed in wind tunnellaboratories to verify computational modelling. The focus of the project is to optimisethe performance a MCT through the inclusion of ‘tubercled’ turbine blades and a chan-nelling device. The comprehensive systems review included designing an appropriatedata acquisition system, component stress testing and re-manufacturing the prototypeblades. Multiple tubercle, angle of attack and channelling device configurations weretested at a range of Tip Speed Ratios, to determine the optimum coefficient of powerfor the system. Based on these results, commercial viability will be investigated forthe technology. The exhibition will demonstrate the results obtained and future com-mercial prospects of the technology.
48

H4 High temperature thermal storage system
Students Liguo Dai, Matthew EmesSupervisor Mr Gareth Bridges
Sponsor Ammjohn Engineering Pty Ltd
Renewable energy sources are intermittent and not capable of supplying power atpeak demand. It is hoped a Thermal Energy Storage System (TESS) investigated inthe project ‘1482: High Temperature Thermal Storage System’ will assist such tech-nologies in meeting electricity demand. Silicon is used as the storage medium in theTESS as it can store large quantities of thermal energy per unit mass. Silicon actslike a battery, where thermal energy can be extracted from it when required. The ef-fectiveness of this extraction depends on the phase of the silicon, where fully moltensilicon corresponds to a fully charged battery and solidified silicon can be thought ofas a low-charged battery. Two issues of the TESS will be investigated in this project bystudents Liguo Dai and Matthew Emes, supervised by Gareth Bridges in partnershipwith Ammjohn Engineering Pty Ltd and financially sponsored by Ammjohn Engineer-ing Pty Ltd.
1. Significant concern remains on whether silicon and its containment material canresist fracture and fatigue when heating to silicon’s melting point of 1414°C.Test crucibles will be heated in a high temperature furnace and cooled samplesobserved under a Scanning Electron Microscope.
2. Heat transfer from silicon to a working fluid in a duct will be modelled to deter-mine how effectively heat can be extracted from silicon for various degrees ofsolidification, inlet temperatures and mass flow rates.
H5 Investigation of the wake of a horizontal axis windturbine
Students Eshodarar Sureshkumar, Anthony Kent Murphy, Samir Howell,Ka Lok Lee, Puzhi Yao, Chu Xiang Chiew
Supervisors Dr Maziar Arjomandi, Assoc. Prof. Richard Kelso,Mr Alex Laratro
Sponsor eLabtronics
Exhibition Abstract – 1441
Project number 1441
Project title Investigation of the wake of a Horizontal axis wind turbine
Students' names Eshodarar Sureshkumar, Anthony Kent Murphy, Samir Howell, Ka Lok Lee,
Puzhi Yao, Chu Xiang Chiew
Supervisors' names Maziar Arjomandi, Richard Kelso, Alex Laratro
Sponsors eLabtronics
Abstract:
With increasing need for efficient sustainable energy resources, this project aimed to contribute by investigating the wake of a Horizontal Axis Wind Turbine (HAWT). The wake is the region downstream of an operating turbine, where the airflow is changed due to the motion of the turbine. HAWTs operating in the wake of another turbine experience a loss in power, as well as increased loads and noise production. Understanding the wake can lead to improving current wind technology, which can significantly reduce the dependence on fossil fuels for energy generation.
The wake of the turbine was investigated using an empirical model, a Computational Fluid Dynamics (CFD) model, and experiments in the wind tunnel. Characteristics such as the wake diameter, velocity deficit, and power coefficient of the wake were being investigated. The vortices and eddies in the wake were also of interest in this project. The data obtained by testing a model scale turbine in the wind engineering section of the Thebarton wind tunnel would be compared against the CFD and empirical model results for verification. This exhibition would display the results we have gathered from the three components as well as the components used for the project.
Figure 1: Left to right - Larsen model (Empirical) of the velocity propagation in the wake and the pair of vortices at the cross section of 7D (CFD)
With increasing need for efficient sustainable energy resources, this project aimed tocontribute by investigating the wake of a Horizontal Axis Wind Turbine (HAWT). Thewake is the region downstream of an operating turbine, where the airflow is changed
49
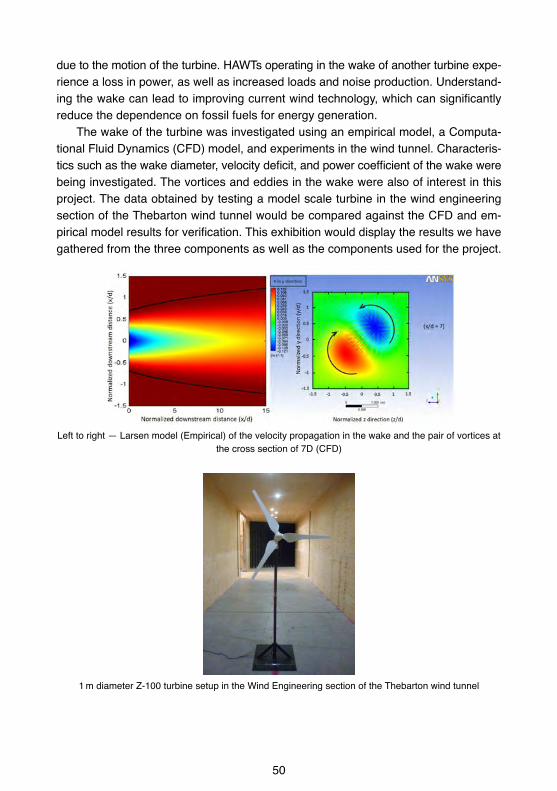
due to the motion of the turbine. HAWTs operating in the wake of another turbine expe-rience a loss in power, as well as increased loads and noise production. Understand-ing the wake can lead to improving current wind technology, which can significantlyreduce the dependence on fossil fuels for energy generation.
The wake of the turbine was investigated using an empirical model, a Computa-tional Fluid Dynamics (CFD) model, and experiments in the wind tunnel. Characteris-tics such as the wake diameter, velocity deficit, and power coefficient of the wake werebeing investigated. The vortices and eddies in the wake were also of interest in thisproject. The data obtained by testing a model scale turbine in the wind engineeringsection of the Thebarton wind tunnel would be compared against the CFD and em-pirical model results for verification. This exhibition would display the results we havegathered from the three components as well as the components used for the project.
Exhibition Abstract – 1441
Project number 1441
Project title Investigation of the wake of a Horizontal axis wind turbine
Students' names Eshodarar Sureshkumar, Anthony Kent Murphy, Samir Howell, Ka Lok Lee,
Puzhi Yao, Chu Xiang Chiew
Supervisors' names Maziar Arjomandi, Richard Kelso, Alex Laratro
Sponsors eLabtronics
Abstract:
With increasing need for efficient sustainable energy resources, this project aimed to contribute by investigating the wake of a Horizontal Axis Wind Turbine (HAWT). The wake is the region downstream of an operating turbine, where the airflow is changed due to the motion of the turbine. HAWTs operating in the wake of another turbine experience a loss in power, as well as increased loads and noise production. Understanding the wake can lead to improving current wind technology, which can significantly reduce the dependence on fossil fuels for energy generation.
The wake of the turbine was investigated using an empirical model, a Computational Fluid Dynamics (CFD) model, and experiments in the wind tunnel. Characteristics such as the wake diameter, velocity deficit, and power coefficient of the wake were being investigated. The vortices and eddies in the wake were also of interest in this project. The data obtained by testing a model scale turbine in the wind engineering section of the Thebarton wind tunnel would be compared against the CFD and empirical model results for verification. This exhibition would display the results we have gathered from the three components as well as the components used for the project.
Figure 1: Left to right - Larsen model (Empirical) of the velocity propagation in the wake and the pair of vortices at the cross section of 7D (CFD)
Left to right — Larsen model (Empirical) of the velocity propagation in the wake and the pair of vortices atthe cross section of 7D (CFD)
Model HAWT in the Wind tunnel Figure 2: 1 m diameter Z-100 turbine setup in the Wind Engineering section of the Thebarton wind tunnel
1 m diameter Z-100 turbine setup in the Wind Engineering section of the Thebarton wind tunnel
50
H6 Develop a data acquisition system for a SwearingenSX-300
Student Matthew SobeySupervisor Dr Maziar Arjomandi
Sponsor Nova Systems
Aircraft testing is an important part of aircraft development and modification, and suc-cessful test programs often require a Data Acquisition System (DAS) to be designedand installed on the aircraft. With this in mind Nova Systems have sponsored theproject to develop a (DAS) for an aerobatic aircraft, with the goal of developing flighttest engineer (FTE) skills in engineers for future testing programs. If Nova Systemsare able to train FTEs it will allow them to grow their existing capabilities and alsoprovide employment opportunities for local engineers.
The technical objective of the project is to display in real time, and record all thedata necessary to measure aircraft operational characteristics like manoeuvrabilityand stability. To successfully measure all the parameters required the DAS must in-terface with existing aircraft systems and new systems must be developed to measurecurrently unavailable parameters. This exhibition displays the developed DAS, cou-pled with a flight simulator, to provide an interactive method for demonstrating thesystem to the public.
H7 Flow morphology of a plasma actuator
Student Matthew OrmanSupervisors Dr Maziar Arjomandi, Dr Cristian Birzer
Dielectric Barrier Discharge (DBD) Plasma Actuators are extensively represented by2-Dimensional models throughout research literature, despite the nature of their flowbeing inherently 3-Dimensional. Considering common flow events and characteristicstypical of a DBD Plasma Actuator, the presence of filaments of current (streamers) inthe flow profile is postulated to effect the internal flow dynamics, whereby fluid propertyvariations incur internal eddy formation. This renders a 2-Dimensional definition for
51
the device inadequate to explain the dynamic effect of the implementation of theseactuators into finer applications.
In analysing the span-wise flow distribution perpendicular to the plane of all exist-ing 2D models, and extracting slices of flow data via direct flow measurement and Par-ticle Image Velocimetry (PIV) methods, the addition or stacking of these 2D planes al-lows for the extension of all current models into a more comprehensive 3-Dimensionalmodel that also accounts for flow events such as streamer formation. By investigatingand numerically modelling the regularity of the spacing between the filaments formedalong the span, the further mathematical simplification of the 3D model ensures thatthe new model is computationally efficient while providing a greater level of detail andphysical practicality for control logic integration.
J1 AUV mother ship
Students Robert Buckerfield, David Heah, Alexander Minchin,Andrew Minne, Nathan Roberts, Jack Vince
Supervisors Assoc. Prof. Colin Kestell, Dr Steven Grainger
Autonomous Underwater Vehicles (AUVs) are programmable robotic vehicles de-signed to navigate in water without input from operators and have become conven-tional equipment for oil and gas exploration, scientific, and military purposes. Limitedon-board energy resources compromises the effectiveness of AUVs, creating issuesfor deployment and recovery.
This project aims to design and build a remotely controlled AUV Mother Ship ca-pable of transportation, deployment and recovery of an existing AUV (The Blue Bottle)in order to maximise the operating range of small scale AUVs, with future potential forrecharging and navigational calibration. Furthermore, the design of the deploymentand recovery system permits the conveyance of other payloads for different appli-cations, such as lifesaving equipment. The project incorporates the retrofitting of an
52
electrically-powered personal watercraft with an outrigger and supporting structure todevelop an asymmetrical catamaran, that will provide a basis on which other sub-systems can work from. Necessary control systems have been designed to suit theapplication, whilst technical analyses have been performed to optimise the design ofthe catamaran structure and operation.
J2 Evaluation of stress and strain in gas and oil pipelines: Areal enginnering project
Student Mahdi SalimianSupervisors Assoc. Prof. Andrei Kotousov, Assoc. Prof. Reza Ghomashchi
Sponsor GPA Engineering Ltd
Exhibition Abstract
Project Number: 1507
Project Title: Evaluation of stress and strain in gas and oil pipelines: a real engineering project
Student: Mahdi Salimian
Supervisors: A/Professor Andrei Kotousov
A/Professor Reza Ghomashchi
Sponsor: GPA Engineering Ltd
Pipelines are vital energy distribution means for many industries and applications. Therefore, the design, construction and maintenance of pipelines have been the focus of extensive research and development studies in the past. However, there are still many problems associated with the assessment of the structural integrity of pipelines. One of such issues is the stresses acting between the pipeline and its support and how the selection of appropriate support could affect that. The current project is therefore initiated to study the frictional forces acting between the pipeline and its supports and to provide some information and practical recommendations to be adopted by the pipeline industry for future designs.
The project is supported by GPA Engineering Ltd and it investigates the friction conditions between the pipe and typical supports. These conditions significantly affect the pipe stress state and have been taken into consideration at the design and construction stages. A unique experimental rig was designed and fabricated. The design of this rig, which closely simulates the loading condition for the actual pipe and supports, was verified by analytical calculations from the classical beam theory as well as 3D FE studies.
In this exhibition we will outline the experimental procedures and will highlight the major outcomes achieved for this project.
Pipelines are vital energy distribution means for many industries and applications.Therefore, the design, construction and maintenance of pipelines have been the focusof extensive research and development studies in the past. However, there are stillmany problems associated with the assessment of the structural integrity of pipelines.One of such issues is the stresses acting between the pipeline and its support and howthe selection of appropriate support could affect that. The current project is thereforeinitiated to study the frictional forces acting between the pipeline and its supports andto provide some information and practical recommendations to be adopted by thepipeline industry for future designs.
The project is supported by GPA Engineering Ltd and it investigates the frictionconditions between the pipe and typical supports. These conditions significantly affectthe pipe stress state and have been taken into consideration at the design and con-struction stages. A unique experimental rig was designed and fabricated. The designof this rig, which closely simulates the loading condition for the actual pipe and sup-ports, was verified by analytical calculations from the classical beam theory as well as3D FE studies.
In this exhibition we will outline the experimental procedures and will highlight themajor outcomes achieved for this project.
53
J3 Measurement of radiant fraction of ceremonial flames
Student Vasilios MoshosSupervisors Prof. Graham Nathan, Assoc. Prof. Farid Cristo
Sponsor FCT Combustion
FCT Combustion designs and supplies industrial and ceremonial burners to a diverserange of clients. This project involves conducting laboratory tests on a range of FCT’sburners primarily to determine the radiant fraction emitted from each of the burners un-der a range of conditions. The burners in question have not previously been tested ina controlled environment, and require reliable evaluation. Before any testing could beconducted on the burners in focus, it was necessary to establish a sound experimentalset-up. Verification of the measurement accuracy was obtained by comparison withpublished academic data, using identical equipment and methodology. This projectaims to deliver a set of accurate data on global flame characteristics to FCT. This datawill then be used as inputs to a mathematical model that will extrapolate the resultsto predict the radiant fraction and total heat flux for much larger ceremonial burners.An experimental set up was established in two locations and data has been collectedand processed for the crinkle and mini cauldron burners. This exhibition shows howthe experimental method was established and validated, as well as presenting someof the data collected and also outlines the plan for future work in the area.
54

J4 Automatic test station for firework ignition systems
Students Ches Condo, Luke HanniganSupervisor Dr. Ley Chen
Sponsor Foti Fireworks
This project originated from discussions with an executive member of leading Aus-tralian fireworks manufacturer, Foti Fireworks, about the manufacturing processesaccompanying their business model. Foti Fireworks has an extensive history span-ning over 200 years, and their manufacturing methods were a reflection of this. At atime of business expansion, it became apparent that they needed to consider moreefficient manufacturing processes, and so ideas were collaborated and a private con-tract established. The nature of the design was highly creative rather than analytic,involving extensive trial and error in prototyping. Fundamentally, the aim was to mimicthe previously used manual procedures with efficient mechanisms, and install thesemechanisms together to form a system that executes a number of sequential steps.Our exhibition aims to provide exposure to the avenues that were explored in order toachieve an effective design. The fundamental elements of the design include, pickingof randomly orientated objects, electrical testing of specimen in automated assem-blies, electrical short-circuit protection, flow control of small objects passing throughautomated assemblies, and cohesion between mechanisms in a machine. These top-ics are presented in detail to give an insight to the design process for this project. Ontop of this we cover the processes that we used to manufacture our machine, andissues that were encountered on the way.
55
Index of project booths by supervisorAssoc. Prof. Amir Anvar: F1, F2, F6, F7, F8, F9
Dr Maziar Arjomandi: E2, E4, G2, H5, H6, H7
Mr Mohamed Awadalla: C5
Dr David Bentley: G1, H2
Dr Antoni Blazewicz: C1, E1, E7, H3
Dr Cristian Birzer: A7, B3, B6, D2, E2, E9, H7
Mr Michael Bolzon: G2
Mr Gareth Bridges: E6, H4
Assoc. Prof. Ben Cazzolato: A7, B5, B9, E5, F3, G3
Dr. Ley Chen: A3, D1, J4
Dr. John Codrington: B7, G3
Assoc. Prof. Farid Cristo: A5, J3
Prof. Bassam Dally: F4
Assoc. Prof. Con Doolan: F5
Dr Erwin Gamboa: A1, A2, E3, H1
Assoc. Prof. Reza Ghomashchi: A1, J2
Dr Steven Grainger: B4, B8, D5, E7, E8, J1
Dr Paul Grimshaw: G1, H2
Prof. Colin Hansen: B9
Dr Kristy Hansen: H3
Dr David Harvey: B5
Assoc. Prof. Eric Hu: D2, F7
Dr Claire Jones: A6
Dr Peter Kalt: B3, F4
Assoc. Prof. Richard Kelso: C3, E9, G1, G2, H3, H5
Assoc. Prof. Colin Kestell: B8, C1, D5, E1, J1
Dr Min Kwan Kim: B5, C2
Assoc. Prof. Andrei Kotousov: B2, B5, J2
56
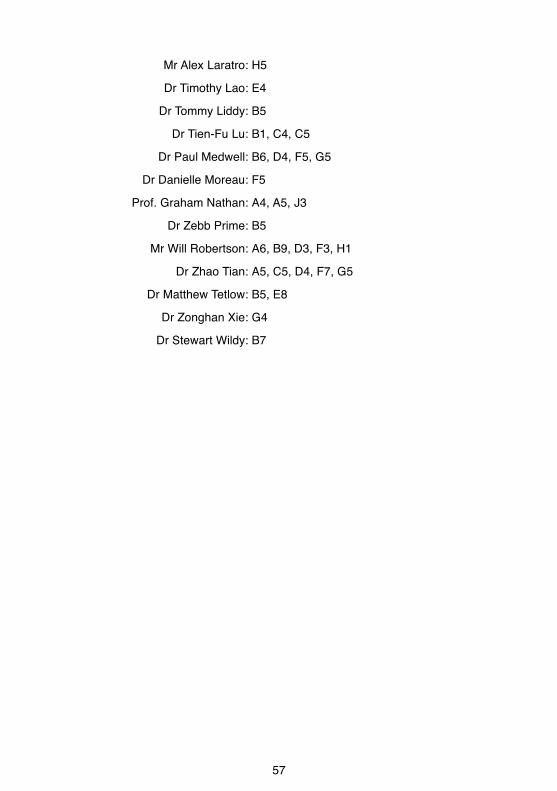
Mr Alex Laratro: H5
Dr Timothy Lao: E4
Dr Tommy Liddy: B5
Dr Tien-Fu Lu: B1, C4, C5
Dr Paul Medwell: B6, D4, F5, G5
Dr Danielle Moreau: F5
Prof. Graham Nathan: A4, A5, J3
Dr Zebb Prime: B5
Mr Will Robertson: A6, B9, D3, F3, H1
Dr Zhao Tian: A5, C5, D4, F7, G5
Dr Matthew Tetlow: B5, E8
Dr Zonghan Xie: G4
Dr Stewart Wildy: B7
57

The University of Adelaide 3