Abstract Table of Contents - Math Encounters Blog · 22.02.2012 · Abstract During World War II,...
6
Subject: TDC Author: Mathscinotes Title: Position Keeper Modeling Checked By: Self Keywords: TDC, Submarine, Torpedo, World War II Checked By: Position Keeper Modeling Abstract During World War II, all the submarines of all warring nations used analog computers to assist submarine commanders with aiming straight-running torpedoes (e.g. UK used their "fruit machine."). US submarines used a computer called the Torpedo Data Computer (TDC) that was considered the best of these devices.The Torpedo Data Computer (TDC) included a function known as Position Keeping that was a mechanical solver for a system of differential equations .This technical note compares the output from a simple Mathcad model of the Position Keeper with the output from a kinematic model for a simple test case. I solve the system of ODEs using Mathcad's standard ODE solver and a homebrew routine that may be more appropriate for people who are implementing software versions of the TDC's position keeper function. Table of Contents Update TOC Abstract Table of Contents TOC Introduction Analysis of Bearing Angle and Range Versus Time Simulation Approach Field of Bale Kinematic Model Differential Equation Model Euler‐Method Solution Graphical Display Standard Differential Equation Solver Conclusion Reference Jump to region Introduction The model I am using here comes from following web site. http://www.hnsa.org/doc/tdc/pg011.htm See reference section for excerpt I am going to focus on the Position Keeper function of the TDC, which is made up of two coupled differential equations and two subsidiary equations. The key function of the Position Keeper is to provide estimates of the target's bearing and range. My simulation will focus on these variables, which are critical to obtaining a fire control solution , which I will not cover here. A more thorough modeling would include more complex scenarios, but this illustrates the basic approach used. Tactically, the submarine would estimate the target course, range, and speed from periscope and hydrophone readings. Position Keeper Model for the TDC 1 of 6 22-February-2012
Transcript of Abstract Table of Contents - Math Encounters Blog · 22.02.2012 · Abstract During World War II,...
-
Subject: TDC Author: MathscinotesTitle: Position Keeper Modeling Checked By: SelfKeywords: TDC, Submarine, Torpedo, World War II Checked By:
Position Keeper ModelingAbstract
During World War II, all the submarines of all warring nations used analog computers toassist submarine commanders with aiming straight-running torpedoes (e.g. UK used their"fruit machine."). US submarines used a computer called the Torpedo Data Computer(TDC) that was considered the best of these devices.The Torpedo Data Computer(TDC) included a function known as Position Keeping that was a mechanical solver for asystem of differential equations .This technical note compares the output from a simpleMathcad model of the Position Keeper with the output from a kinematic model for asimple test case. I solve the system of ODEs using Mathcad's standard ODE solver and ahomebrew routine that may be more appropriate for people who are implementingsoftware versions of the TDC's position keeper function.
Table of ContentsUpdate TOC
AbstractTableofContentsTOCIntroductionAnalysisofBearingAngleandRangeVersusTimeSimulationApproachFieldofBattleKinematicModelDifferentialEquationModelEulerMethodSolutionGraphicalDisplayStandardDifferentialEquationSolverConclusionReference
Jump to region
IntroductionThe model I am using here comes from following web site.
http://www.hnsa.org/doc/tdc/pg011.htm See reference section for excerpt
I am going to focus on the Position Keeper function of the TDC, which is made up of twocoupled differential equations and two subsidiary equations.
The key function of the Position Keeper is to provide estimates of the target's bearingand range. My simulation will focus on these variables, which are critical to obtaining afire control solution , which I will not cover here.
A more thorough modeling would include more complex scenarios, but this illustratesthe basic approach used. Tactically, the submarine would estimate the target course,range, and speed from periscope and hydrophone readings.
Position Keeper Model for the TDC 1 of 6 22-February-2012
-
Subject: TDC Author: MathscinotesTitle: Position Keeper Modeling Checked By: SelfKeywords: TDC, Submarine, Torpedo, World War II Checked By:
The TDC would put out a constantly updated position for the target, which the sub skipperwould compare against further periscope readings. The TDC target model would be updateduntil it could accurately predict the target's motion.
With the TDC, the submarine could maneuver and the TDC would keep track of the target'sposition relative to the submarine. This greatly improved the accuracy of the whole firecontrol operation.
Analysis of Bearing Angle and Range Versus Time
Simulation Approach
I am going to work this problem assuming the simple case of a target and submarine(referred to as "Own Ship") both pursuing constant velocity courses. This will allowme to determine the exact distance and bearing numbers using a simple kinematicmodel and the differential equation model. This way, I can verify that my differentialequation solution is reasonable.
I could use the Mathcad differential equation solvers, but I decided to put together asimple solution using Euler's method (i.e. the simplest possible way). This would beeasy for someone to code using any number of programming languages.
Field of Battle
Assume that we are going to place our submarine and target on a 1000 meter by 1000meter grid indexed as shown in Figure 1.
Y A
xis
X Axis 1000 meters0 meters
1000 meters
0 meters
Figure 1: Torpedo Data Computer Simulation Grid
Position Keeper Model for the TDC 2 of 6 22-February-2012
-
Subject: TDC Author: MathscinotesTitle: Position Keeper Modeling Checked By: SelfKeywords: TDC, Submarine, Torpedo, World War II Checked By:
Kinematic Model
I am going to work this problem assuming the simple case of a target and submarine bothpursuing constant velocity courses. This will allow me to determine the exact distance andbearing numbers using a simple kinematic model and the differential equation model.
Target Own Ship
x coordinate x coordinateRT0
10
900
m RO0900
10
my coordinate y coordinate
x component x componentVT0
10
10
ms
VO010
5
ms
y component y component
RT t( ) RT0 VT0 t Target Position as a function of time.
RO t( ) RO0 VO0 t Submarine Position (i.e. Own Ship) Position as afunction of time.
R t( ) RT t( ) RO t( ) Distance between target and submarine.
t( ) 180deg atan2 RT t( ) RO t( ) 0 RT t( ) RO t( ) 1 Bearing of target fromsubmarine.
Differential Equation Model
SO VO0 11.18ms
Speed of the Submarine (Own Ship)
ST VT0 14.142ms
Speed of the Target
B' Br A R( )SO sin Br( ) ST sin A( )
R Bearing Angle Differential Equation
R' Br A( ) SO cos Br( ) ST cos A( ) Range Differential Equation
CO atan2 VO00VO01
180deg 26.565 deg Own Ship Course (sub knows itscourse)
CT atan2 VT00VT01
180deg 225 deg Target Ship Course (subestimates this from periscopereading of angle on the bow)
Position Keeper Model for the TDC 3 of 6 22-February-2012
-
Subject: TDC Author: MathscinotesTitle: Position Keeper Modeling Checked By: SelfKeywords: TDC, Submarine, Torpedo, World War II Checked By:
Euler-Method Solution
It is a bit crude, but it appears to work.B
Br
R
A
dt 0.1s
B0 0( )
R0 1259m
A0 B0 180deg CT
Br0 B0 CO
Bi dt B' Bri 1 Ai 1 Ri 1 Bi 1Bri Bi CO
Ai Bi 180deg CT
Ri dt R' Bri Ai Ri 1Bi dt B' Bri Ai Ri Bi 1
i 1 900for
B
Br
Rm
A
Algorithm time step
Initialize Bearing
Initialize Range
Initialize Target Angle
Initialize Relative Bearing
Main Loop
Predict the Bearing
Compute the Next Relative Bearing
Compute the Next Target Angle
Compute Next Range
Corrector for Bearing
Return all the valuesI needed to remove the unitsfrom the range vector (a Mathcad15 limitation)
Graphical Display
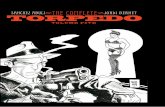
Here is a graph comparing my kinematic model with the model from the differentialequation solution. They are identical, which they should be. The nice thing about thedifferential equation solution is that it can handle changes in course by the submarine. Thesecourse changes were automatically fed into the TDC by the sub's gyrocompass.
Position Keeper Model for the TDC 4 of 6 22-February-2012
-
Subject: TDC Author: MathscinotesTitle: Position Keeper Modeling Checked By: SelfKeywords: TDC, Submarine, Torpedo, World War II Checked By:
i 0 900 Each time increment corresponds to 0.1 seconds.
0 200 400 600 800 1 1030
500
1 103
1.5 103
0
50
100
150
200
250
Exact Target Range (Kinematic)TDC Target RangeExact Target Bearing (Kinematic)TDC Target Bearing
Kinematic Model vs Simulated TDC Output
Time Increment (0.1 seconds)
Ran
ge (m
eter
s)
Bea
ring
Ang
le (
)
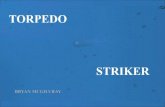
Standard Differential Equation Solver
Mathcad has excellent ODE solvers. Here is the same problem worked using one of theirODE solver routine.
T1 90 Maximum time -- the solver does not like units
SOSOm
s
STSTm
s
The solver does not like units
Given
uB u( )d
d
SO sin B u( ) CO ST sin B u( ) CT R u( )
= B 0( ) 0.785=
uR u( )d
dSO cos B u( ) CO ST cos B u( ) CT = R 0( ) 1259=
f
g
OdesolveB
R
u T1 900
z1 0 0.1 90
Position Keeper Model for the TDC 5 of 6 22-February-2012
-
Subject: TDC Author: MathscinotesTitle: Position Keeper Modeling Checked By: SelfKeywords: TDC, Submarine, Torpedo, World War II Checked By:
0 20 40 60 80 1000
250
500
750
1000
1250
1500
0
50
100
150
200
250
300
RangeBearing
Solution using the Mathcad Standard Solver
Time (sec)
Ran
ge (m
)
Bea
ring
Ang
le (
)
My crude solver got the same result.
Conclusion This model appears to provide a reasonable example for the operation of the TDC, at leastas I read it in the old manual.
Reference
Old Navy TDC manual excerpt
Position Keeper Model for the TDC 6 of 6 22-February-2012
-
pg011.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg011.htm
2 of 3 2/16/2012 1:14 PM
-
pg012.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg012.htm
2 of 3 2/16/2012 1:15 PM
-
pg013.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg013.htm
2 of 3 2/16/2012 1:15 PM
-
pg014.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg014.htm
2 of 3 2/16/2012 1:16 PM
-
pg015.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg015.htm
2 of 3 2/16/2012 1:16 PM
-
pg016.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg016.htm
2 of 3 2/16/2012 1:16 PM
-
pg017.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg017.htm
2 of 3 2/16/2012 1:17 PM
-
pg018.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg018.htm
2 of 3 2/16/2012 1:17 PM
-
pg019.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg019.htm
2 of 3 2/16/2012 1:17 PM
-
pg020.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg020.htm
2 of 3 2/16/2012 1:17 PM
-
pg021.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg021.htm
2 of 3 2/16/2012 1:18 PM
-
pg022.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg022.htm
2 of 3 2/16/2012 1:18 PM
-
pg023.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg023.htm
2 of 3 2/16/2012 1:18 PM
-
pg024.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg024.htm
2 of 3 2/16/2012 1:18 PM
-
pg025.jpg
Historic Naval Ships Association - Torpedo Data Computer Mark 3 http://www.hnsa.org/doc/tdc/pg025.htm
2 of 3 2/16/2012 1:19 PM
Page14.pdf
Page13.pdf
Page12.pdf
Page11.pdf
Page10.pdf
Page9.pdf
Page8.pdf
Page7.pdf
Page6.pdf
Page5.pdf
Page4.pdf
Page3.pdf
Page2.pdf
Page1.pdf
Page15.pdf
mbiegertFile AttachmentTDC_Reference_HNSA.pdf