abstract of end of year project
19
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG SELMI MARWAN- KHATTABI NADER Page 17 Chapitre I : Etude de transmission de puissance:
-
Upload
khattabi-nader -
Category
Documents
-
view
57 -
download
0
Transcript of abstract of end of year project

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 17
Chapitre I :
Etude de transmission de puissance:

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 18
1. Schéma cinématique :
2. Etude de couple a l’entrée et sortie :
On considère une voiture qui roule, et nous voulons contrôler la vitesse de chaque roue. Nous
remarquons que la vitesse change proportionnellement à l’angle de déviation.
Considérons le cas d’un virage gauche :
-soit l’angle de déviation (δ)=90°.
-la roue arrière gauche va tourner en arrière
- soit R le rayon définissant la distance entre le centre de virage jusqu’à la moitié de l’axe arrière des
roues.
La relation entre l’angle de déviation, rayon R, la vitesse de rotation et les dimensions de voiture
s’écrit sous la forme :
𝑅 =ωb
tanδ ; 𝜔désiré =
Vdésiré
R=Vdésiré .tanδ
ωb
On Remarque si l’angle de déviation est nulle alors le rayon R tend vers l’infinie donc la voiture roule
dans une ligne droite. Quand on tourne d’une vitesse désiré, sans tenir compte, de la vitesse de chaque
roue, tout l’ensemble (véhicule) tourne avec le même vitesse désiré, cela veut dire que toutes les roues
ont la même vitesse angulaire ωb.
Figure 7 : Schéma cinématique d’un pont
différentiel
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 19
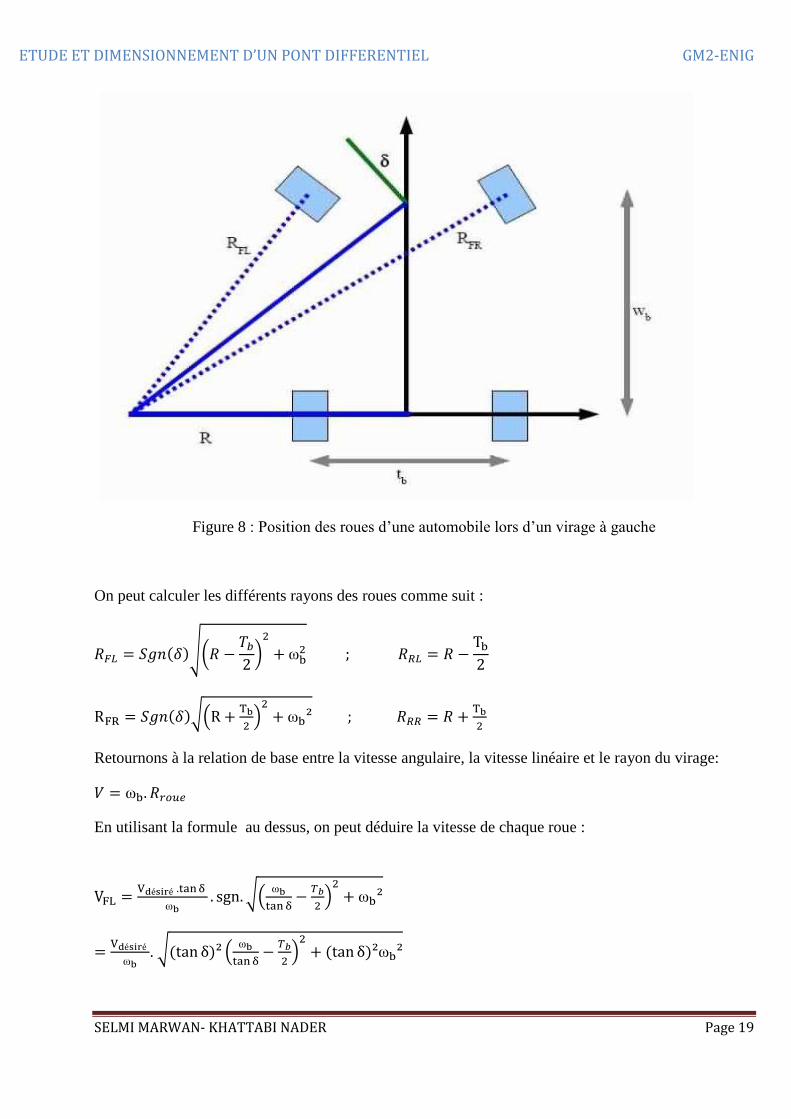
Figure 8 : Position des roues d’une automobile lors d’un virage à gauche
On peut calculer les différents rayons des roues comme suit :
𝑅𝐹𝐿 = 𝑆𝑔𝑛(𝛿)√(𝑅 −𝑇𝑏2)2
+ ωb2 ; 𝑅𝑅𝐿 = 𝑅 −
Tb2
RFR = 𝑆𝑔𝑛(𝛿)√(R +Tb
2)2
+ ωb² ; 𝑅𝑅𝑅 = 𝑅 +Tb
2
Retournons à la relation de base entre la vitesse angulaire, la vitesse linéaire et le rayon du virage:
𝑉 = ωb. 𝑅𝑟𝑜𝑢𝑒
En utilisant la formule au dessus, on peut déduire la vitesse de chaque roue :
VFL =Vdésiré .tanδ
ωb. sgn. √(
ωb
tanδ−𝑇𝑏
2)2
+ ωb²
=Vdésiré
ωb. √(tan δ)² (
ωb
tanδ−𝑇𝑏
2)2
+ (tan δ)²ωb²
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 20
𝑉𝐹𝐿 =Vdésiré
ωb. √(𝜔𝑏 − 𝑡𝑎𝑛 𝛿 .
𝑇𝑏
2)2
+ (𝑡𝑎𝑛 𝛿 .𝜔𝑏)²
Répétant la même démarche pour les roues avant droite, arrière droite et arrière gauche:
VFR =Vdésiré
ωb. √(ωb + tan δ .
𝑇𝑏
2)2
+ (tan δ .ωb)²
𝑉𝑅𝐿 =Vdésiré .tanδ
ωb(
ωb
tan δ+𝑇𝑏
2)
𝑉𝑅𝐿 =Vdésiré
ωb(ωb + 𝑡𝑎 𝑛 𝛿 .
𝑇𝑏
2)
De même :
𝑉𝑅𝑅 =Vdésiré
ωb. (ωb − 𝑡𝑎 𝑛 𝛿 .
𝑇𝑏
2)
Finalement on trouve les relations qui nous permettent de calculer la vitesse associée à chaque roue :
𝑉𝐹𝐿 =Vdésiré
ωb. √(𝜔𝑏 − 𝑡𝑎𝑛 𝛿 .
𝑇𝑏
2)2
+ (𝑡𝑎𝑛 𝛿 .𝜔𝑏)² .
. VFR =Vdésiré
ωb. √(ωb + tan δ .
𝑇𝑏
2)2
+ (tan δ .ωb)2
𝑉𝑅𝐿 =Vdésiré
ωb(ωb + 𝑡𝑎 𝑛 𝛿 .
𝑇𝑏
2) (1)
𝑉𝑅𝑅 =Vdésiré
ωb. (ωb − 𝑡𝑎 𝑛 𝛿 .
𝑇𝑏
2) (2)
Notre pont différentiel est situé entre les roues arrière du véhicule alors dans la suite on va s’intéresser
uniquement aux roues arrière :
𝑉𝑅𝐿 = 𝜔𝑅𝐿 . 𝑅𝑟𝑜𝑢𝑒
{𝜔𝑅𝐿 =
𝑉𝑅𝐿
𝑅𝑟𝑜𝑢𝑒 (3)
𝜔𝑅𝑅 =𝑉𝑅𝑅
𝑅𝑟𝑜𝑢𝑒 (4)
Ce qui nous donne la vitesse de rotation de chaque roue :
𝜔𝑅𝐿 =𝜋.𝑁𝑅𝐿
30
{𝑁𝑅𝐿 =
30.𝜔𝑅𝐿
𝜋 (5)
𝑁𝑅𝑅 =30.𝜔𝑅𝑅
𝜋 (6)

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 21
Remplaçant (3) et (4) respectivement dans (5) et (6) :
{𝑁𝑅𝐿 =
30.𝑉𝑅𝐿
𝜋 (7)
𝑁𝑅𝑅 =30.𝑉𝑅𝑅
𝜋 (8)
Remplaçant (1) et (2) respectivement dans (7) et(8) :
𝑁𝑅𝐿 =30.
Vdésiréωb
(ωb+𝑡𝑎𝑛𝛿.𝑇𝑏2)
𝜋.𝑅𝑟𝑜𝑢𝑒
𝑁𝑅𝑅 =30.
Vdésiréωb
(ωb−𝑡𝑎𝑛𝛿.𝑇𝑏2)
𝜋.𝑅𝑟𝑜𝑢𝑒
Avec :
ωb : distance entre les roues avant et les roues arrière. On adopte ωb = 2200 mm.
𝑇𝑏 : distance entre les roues arrière. 𝑇𝑏 = 1200 mm.
𝑅𝑟𝑜𝑢𝑒: rayon de roue. 𝑅𝑟𝑜𝑢𝑒 = 17pouce / 2 = 215.9 mm.
Condition au limite (𝛿 = 90°)
Vdésiré : vitesse du véhicule au virage (𝛿 = 90°). Vdésiré = 25 Km/h = 6.94 m/s
AN : 𝑁𝑅𝐿 = 139.927 tr/min
𝑁𝑅𝑅 = 473.987 tr/min
Pour la suite, on admettra la valeur de vitesse de rotation 𝑁𝑅𝑅 = 473.987 tr/min comme une
condition a la limite.
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 22
Chapitre II :
Dimensionnement des engrenages
1. Nombre de dent de pignon :

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 23
Z1 maxi =
σFlim. Yst. YYsa. YFa. Yε. Yβ
(σHlimZE
)2
.1
ZH2 .1
Zβ2 .1
Zε2 . (
ii + 1) . Zv
2. Zp2. cosβ =
σ0ω0.
cos β
(i
i + 1) . Zv2. Zp
2
Avec : σ0 = σFlim.Yst.Y
Ysa.YFa.Yε.Yβ et ω0 = (
σHlim
ZE)2
.1
ZH2 .
1
Zβ2 .
1
Zε2 et 𝐶𝑟 =
𝑖
𝑖+1
1.1. Calcul de 𝛔𝟎 :
Matériau utilisé : C45(XC48) :
D’après le tableau (1) on a : σFlim. Yst = 75,6 daN/mm2
D’après la figure (9) on prélève :
Y = 1
β = 20°
Yε = 0,25 +0.75
εα or 1,5≤ εα ≤ 1,8 on choisit εα = 1,5
Alors : Yε = 0,25 +0,75
1,5 = 0,75
Yβ = 1 − εβ.β
120 or εγ = εα + εβ
sig⇔ εβ=εγ + εα
𝑑′𝑜𝑢⇔ εβ = 2
Alors : Yβ = 1 − 2.20
120 = 0,666
Finalement on en déduit :
σ0 =σFlim. Yst. Y
Ysa. YFa. Yε. Yβ=
75,6
0,75 .0,66 .4,52= 33,45 da/mm2
1.2.Calcul de 𝛚𝟎:
Recherche de (σHlim
ZE)2
:
On a ZE2 = 0,175. E
En se référant au tableau (1) on aura :
(σHlimZE
)2
= 4.54 daN/mm2
Calcul de ZH :
ZH2 =
2. cosβbsinαt + cosαt
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 24
On a
{tan βb = tan β . cos αt = tan20 . cos 21,17 = 0,33909 (∗)
αt = arctg (tanα
cosβ) = arctg (
tan20
cos20) = 21,17° (∗∗)
En utilisant (*) et (**) on obtient :
βb = 18,7464°
Apres tout calcul fait on obtient :
AN : = 2.cos18,7464
sin21,17 +cos21,17
ZH2 = 5,624
- Calcul de ZB :
ZB = cos β
AN :
cos 20 = 0.9659
- Calcul de Zε :
Zε2 =
1
εα
AN : = 1
1,5
Zε2 = 0,666
Finalement on en déduit :
ω0 = (σHlimZE
)2
.1
ZH2 .1
Zβ2 .1
Zε2
AN : =4,54
(σHlimZE
)2
.1
5,624 .1
0.666 .
1
0,9659
ω0 = 1,2536 daN/mm2
On prélève les valeurs de Zv et Zp d’après les figure (10),(11) :
Zv2 = 0,72
Zp = 1 (choix de calcul)
On peut également déterminer le nombre de dents maximal de pignon :
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 25
Z1 maxi = σ0
ω0.
cosβ
(i
i+1).Zv
2.Zp2
AN : = 33,45
1,2536 .
cos20
(4
4+1).1 .0,72
Z1 maxi = 43,52 ≈ 44 dents
2. calcul des paramètres de pignon :
2.1. Calcul de diamètre primitif de pignon :
2.1.1 Calcul des différentes couples :
Couple nominale de la sortie de la boite vitesse :
Pmoteur = 66 Kw
Nmoteur,maxi= 4000 tr/min
Cn1 = 30 . Pmoteurπ . Nmoteur,maxi
. i
AN : = 30.66000
π.4000. 4
Cn1 = 630,24 N.m
Couple de démarrage :
Cd1 = 2. Cn1
AN : = 2 . 630,24
Cd1 = 1260,48 N.m
2.1.2 Calcul de diamètre primitif de pignon :
On peut calculer le diamètre primitif de pignon à l’aide de l’expression :
on prend Zv = 1 et Kv = 1.15 (choix de calcul)
dp,pignion = √
2
ω0.ρKαβ
.Zv2. Zβ
2 Kβ. Kv
.
.Cd1Cr1
3
AN : dp,pignon = √2
1,2536.10.0,6
0,8.1 . 0,722
1,4 .1,15..1260,48.103
0,8
3
dp,pignon = 101,34 mm
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 26
2.1.3 Calcul de diamètre primitif corrigé de pignon :
Calcul de vitesse corrigé :
Vco1 = π.dp,pignon .Nmoteur,maxi
60
AN : =π . 101,34 .4000
60 ‘
Vco1 = 21225,8mm s⁄ = 21,22m s⁄
Vco1.Z
100=21,22 . 28
100= 5,94
On peut déduire les nouvelles valeurs de Kv et Zv d’après les figures (10) et (12) :
Kv1 = 1,28 et Zv1 = 1,025
Calcul de diamètre primitif corrigé de pignon :
Pour le calcul on prend b=50 mm :
Kαβ =40
𝑏
= 40
50
Kαβ = 0,8
D’après la figure (11) : Zp = 0,72
dpc,pignon = √2
ω0.ρ
Kαβ.Zv1
2.Zβ2
Kβ.Kv1.
.Cd1
Cr1
3
AN : = √2
1,2536 .10 .0,6
0,8.1,025 .0,722
1,4 .1,28..1260,48.103
0,8
3
𝑑𝑝𝑐,𝑝𝑖𝑔𝑛𝑜𝑛 = 104,16 𝑚𝑚
2.1.4 Vérification du diamètre primitif :
𝑑𝑚,𝑝𝑖𝑔𝑛𝑖𝑜𝑛 =𝑑𝑝𝑐,𝑝𝑖𝑔𝑛𝑜𝑛𝑛+𝑑𝑝,𝑝𝑖𝑔𝑛𝑖𝑜𝑛
2
AN : =104,16+ 101,34
2
𝑑𝑚,𝑝𝑖𝑔𝑛𝑜𝑛 = 102,75 𝑚𝑚

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 27
|𝑑𝑝𝑐,𝑝𝑖𝑔𝑛𝑜𝑛− 𝑑𝑝,𝑝𝑖𝑔𝑛𝑜𝑛|
𝑑𝑚,𝑝𝑖𝑔𝑛𝑜𝑛
AN : = |104,16−101,34|
102,75= 0,02
2% ≤ 10% 𝑣é𝑟𝑖𝑓𝑖é
2.2 Choix de module moyen:
2.2.1 Angle d’inclinaison d’hélices :
𝑡𝑔𝛽 = 2 .𝜋
0,628= 0,34
𝛽1 = 21°
2.2.2 Encadrement de nombre de dents maximal de pignon 𝒁 :
0,6 . 𝑍1 𝑚𝑎𝑥𝑖 ≤ 𝑍1 ≤ 0,8 . 𝑍1 𝑚𝑎𝑥𝑖
26,4 ≤ 𝑍 ≤ 35,2
2.2.3 Encadrement et choix du module moyen au niveau de pignon/couronne :
On sait que :
26,4 ≤ 𝑍𝑝𝑖𝑔𝑛𝑜𝑛 ≤ 35,2
AN : 104,16 .𝑐𝑜𝑠 21
35,2≤ 𝑚𝑚1 ≤
104,16 .𝑐𝑜𝑠 21
26,4
2,76 ≤ 𝑚𝑚1 ≤ 3,68
D’après le tableau (2) on prend : 𝑚𝑚1 = 3
2.3 Calcul de nombre de dent du pignon :
Nombre de dents de pignon calculé :
𝑑𝑝𝑐,𝑝𝑖𝑔𝑛𝑜𝑛 = 𝑍𝑝,𝑐𝑎𝑙𝑐𝑢𝑙é.𝑚𝑚1
𝑍𝑐,𝑝𝑖𝑔𝑛𝑜𝑛 =𝑑𝑝𝑐,𝑝𝑖𝑔𝑛𝑜𝑛
𝑚𝑚1
AN : =104,16
3
𝑍𝑐,𝑝𝑖𝑔𝑛𝑜𝑛 = 34,72 𝑑𝑒𝑛𝑡𝑠
𝑍𝑝 ≈ 35 𝑑𝑒𝑛𝑡𝑠 𝑣é𝑟𝑖𝑓𝑖é
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 28
3. Calcul de diamètre primitif de couronne :
3.1. Calcul de diamètre primitif de couronne :
3.1.1 Calcul des différentes couples :
Couple nominale de la couronne :
𝐶𝑛2 = 𝑖 . 𝐶𝑛𝑠𝑏𝑣
AN : = 4.630,24
𝐶𝑛2 = 2520,96 𝑁.𝑚
Couple de démarrage :
𝐶𝑑2 = 2. 𝐶𝑛2
AN : = 2 . 2520,96
𝐶𝑑2 = 5041,91 𝑁.𝑚
3.1.2 Calcul de diamètre primitif de couronne :
On peut calculer le diamètre primitif de la couronne à l’aide de l’expression :
𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑓,𝑐o𝑢𝑟𝑜𝑛𝑛𝑒 = √2
𝜔0.𝜌
𝐾𝛼𝛽.𝑍𝑣2.𝑍𝛽
2
𝐾𝛽.𝐾𝑣.
.𝐶𝑑2
𝐶𝑟23
On utilise les mêmes valeurs de paramètres utilisés dans le calcul du diamètre primitif du pignon :
AN : 𝑑𝑝,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = √2
1,2536.10.0,6
0,8.1 . 0,722
1,4 .1,15..5041,91.103
0,8
3
𝑑𝑝𝑐𝑜𝑢r𝑜𝑛𝑛𝑒 = 160,87 𝑚𝑚
3.1.3 Calcul de diamètre primitif corrigé de couronne :
Calcul de vitesse corrigé :
𝑉𝑐𝑜2 = 𝜋.𝑑𝑝,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒.𝑁𝑚𝑜𝑡𝑒𝑢𝑟,𝑚𝑎𝑥𝑖
60
AN : =𝜋 . 160,87 .4000
60
𝑉𝑐𝑜2 = 33693,84𝑚𝑚 𝑠⁄ = 33,69𝑚 𝑠⁄

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 29
𝑉𝑐𝑜2.𝑍
100=21,22 . 28
100= 9,43
On peut déduire les nouvelles valeurs d’après les figures (10) et (12) :
𝐾𝑣2 = 1,47 𝑒𝑡 𝑍𝑣2 = 1,042
Calcul de diamètre primitif corrigé de pignon :
𝑑𝑝𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = √2
𝜔0.𝜌
𝐾𝛼𝛽.𝑍𝑣2
2.𝑍𝛽2
𝐾𝛽.𝐾𝑣2.
.𝐶𝑑2
𝐶𝑟23
AN : = √2
1,2536 .10 .0,6
0,8.1,042 .0,722
1,4 .1,47..5091,41.103
0,8
3
𝑑𝑝𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = 172,77 𝑚𝑚
3.1.4 Vérification du diamètre primitif de couronne :
𝑑𝑚,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 =𝑑𝑝𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 + 𝑑𝑝,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒
2
AN : =172,77+ 160,87
2
𝑑𝑚,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = 166,82 𝑚𝑚
|𝑑𝑝𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 − 𝑑𝑝,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒|
𝑑𝑚,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 =
|172,77−160,87|
166,82= 0,071
= 7,1% ≤ 10% 𝑣é𝑟𝑖𝑓𝑖é
3.2. Angle d’inclinaison d’hélices du couronne et module moyen:
Pour assurer l’engrènement entre la pignon et la couronne il faut admettre la même angle d’hélices
pour les deux roues, et le même module :
𝛽1 = 𝛽2 = 21° et 𝑚𝑚2 = 𝑚𝑚1 = 3
3.3 Nombre de dents de couronne calculé :
𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑓,𝑐𝑜𝑟𝑟𝑖𝑔é,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = 𝑍𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒,𝑐𝑎𝑙𝑐𝑢𝑙é.𝑚𝑚2

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 30
𝑍𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 =𝑑𝑝𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒
𝑚𝑚2
AN : =1
72,77
3
𝑍𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = 42,59 𝑑𝑒𝑛𝑡𝑠
𝑍𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 ≈ 43 𝑑𝑒𝑛𝑡𝑠
4. Calcul du diamètre primitif du planétaire/satellite :
4.1. Calcul des différentes couples : Couple nominale de la planétaire/satellite :
Pour une condition de limite : virage gauche d’angle = 90 °𝒔𝒊𝒈⇔ 𝜔𝑔 = 0°
On sait que : 𝜔𝑎𝑝 =𝜔𝑎𝑔+ 𝜔𝑎𝑑
2
aussi on a : 𝐶𝑎𝑎𝑑 . 𝜔𝑎𝑑 = 𝐶𝑛𝑠𝑏𝑣. 𝜔𝑠𝑏𝑣
𝑠𝑖𝑔⇔ 𝐶𝑎𝑎𝑑 =
𝐶𝑛𝑠𝑏𝑣
𝜔𝑑𝑟𝑜𝑖𝑡𝑒. 𝜔𝑒
= 𝐶𝑛𝑠𝑏𝑣.𝑁𝑠𝑏𝑣
𝑁𝑎𝑑
AN : 𝐶𝑎𝑎𝑑 =630,24.306,957
473,987
𝐶𝑎𝑎𝑑 = 408,14 𝑁.𝑚
Couple nominale de la planétaire/satellite :
𝐶𝑑𝑎𝑑 = 2 . 𝐶𝑎𝑎𝑑
AN : = 2 .408,14
𝐶𝑑𝑎𝑑 = 816,29 𝑁.𝑚
4.1.2 Détermination du diamètre primitif de la planétaire :
𝑑𝑝,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 = √
2
𝜔0.𝜌𝐾𝛼𝛽
.𝑍𝑣2. 𝑍𝛽
2 𝐾𝛽 . 𝐾𝑣
.
.𝐶𝑑𝑎𝑑𝐶𝑟
3
AN : = √2
1,2536.10.0,6
0,8.1.0,722
1,4.1,15..816,29.103
0,8
3
𝑑𝑝,𝑝𝑙a𝑛é𝑡𝑎𝑖𝑟𝑒 = 87,68 𝑚𝑚
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 31
4.1.3 Vérification du diamètre primitif du planétaire :
Calcul de vitesse corrigé :
𝑉𝑐𝑜3 = 𝜋.𝑑𝑝,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒.𝑁𝑚𝑜𝑡𝑒𝑢𝑟,𝑚𝑎𝑥𝑖
60
AN : =𝜋 . 50,67 .4000
60
𝑉𝑐𝑜3 = 18363,98𝑚𝑚 𝑠⁄ = 18,63𝑚 𝑠⁄
𝑉𝑐𝑜3.𝑍
100=18,63 . 28
100= 5,14
On peut déduire les nouvelles valeurs d’après les figures (10) et (12) :
𝐾𝑣3 = 1,28 𝑒𝑡 𝑍𝑣3 = 1,022
𝑑𝑝𝑐,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 = √2
𝜔0.𝜌
𝐾𝛼𝛽.𝑍𝑣3
2.𝑍𝛽2
𝐾𝛽.𝐾𝑣3.
.𝐶𝑑𝑎𝑑
𝐶𝑟3
AN : = √2
1,2536 .10 .0,6
0,8.1,022.0,722
1,4 .1,28..816,29.103
0,8
3
𝑑𝑝𝑐,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 = 90,21 𝑚𝑚
𝑑𝑚,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 =𝑑𝑝𝑐,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒+𝑑𝑝,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒
2
=90,21+ 87,68
2
𝑑𝑚,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 = 88,94 𝑚𝑚
|𝑑𝑝𝑐,p𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒− 𝑑𝑝,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒|
𝑑𝑚,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒
AN : = |90,21− 87,68|
88,94= 0,02
2% ≤ 10% 𝑣é𝑟𝑖𝑓𝑖é
4.2 Encadrement de la module moyenne au niveau de planétaire/satellite :
on sait que :
26,4 ≤ 𝑍2 ≤ 35,2
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 32
90,21 .𝑐𝑜𝑠 21
35,2≤ 𝑚𝑚2 ≤
90,21 .𝑐𝑜𝑠 21
26,4
2,39 ≤ 𝑚𝑚2 ≤ 3,19
D’après le tableau (2) on prend : 𝑚𝑚2 = 3
4.3 Calcul de nombre de dents des satellites et planétaires :
𝑑𝑝𝑟𝑖𝑚𝑖𝑡𝑖𝑓,𝑐𝑜𝑟𝑟𝑖𝑔𝑒,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 = 𝑚𝑚2. 𝑍𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒
AN : 𝑍𝑐,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 = 𝑑𝑝𝑐,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒
𝑚𝑚2 = 30,07
𝑍𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒 ≈ 30 𝑑𝑒𝑛𝑡𝑠
5. Calcul des modules réels :
5.1 Calcul de module de pignon/couronne :
𝑚1 = 𝑚𝑚1. (1 + 0,5 . 𝛹𝑅𝑀)
𝑜𝑟 𝛹𝑅𝑀𝜖{0,3 . . 0,35}
On choisit : 𝛹𝑅𝑀 = 0,325
𝑚1 = 𝑚𝑚1. (1 + 0,5 . 𝛹𝑅𝑀)
AN : = 3. (1 + 0,5 .0,325)
𝑚1 = 3,48 𝑚𝑚
5.2 Calcul de module de planétaires/satellites :
𝑚2 = 𝑚𝑚2. (1 + 0,5 . 𝛹𝑅𝑀)
AN : = 3 . (1 + 0,5 .0,325)
𝑚2 = 3,48 𝑚𝑚
6. Calcul de différentes largeurs de denture :
On peut calculer les différentes largeurs de roues a l’aide de cette expression :
𝑏 = 2 .(𝑟−𝑟𝑚 )
𝑠𝑖𝑛 𝛿
6.1 Calcul des angles des cônes :
ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 33
-calcul d’angle des cônes pour le pignon et la couronne :
𝑡𝑎𝑛( 𝛿𝑝𝑖𝑔𝑛𝑖𝑜𝑛/𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒) =1
𝑖
AN : = 1
1,22= 0,81
𝛿𝑝𝑖𝑔𝑛𝑖𝑜𝑛/𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = 39,34°
-calcul d’angle des cônes pour le planétaires/satellites :
𝑡𝑎𝑛( 𝛿𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒𝑙𝑙𝑖𝑡𝑒) =1
𝑖
AN : = 1
1= 1
𝛿𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒l𝑙𝑖𝑡𝑒 = 45°
6.2.Calcul des rayons des roues :
-calcul de rayon moyen de pignon :
𝑟𝑚1 =
𝑑𝑝𝑐,𝑝𝑖𝑔𝑛𝑜𝑛
2.𝑚𝑚1
𝑚1
AN : =104,16
2.3
3,38
𝑟𝑚1 = 46,22 𝑚𝑚
-calcul de rayon moyen couronne :
𝑟𝑚2 =
𝑑𝑝𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒
2.𝑚𝑚1
𝑚2
AN : =172,77
2.3
3,28
𝑟𝑚2 = 79,01 𝑚𝑚
-calcul de rayon moyen de planétaires/satellites :
𝑟𝑚3 =
𝑑𝑝𝑐,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒𝑙𝑙𝑖𝑡𝑒
2.𝑚𝑚2
𝑚2
AN : =90,21
2.3
3,28
𝑟𝑚3 = 41,25 𝑚𝑚

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 34
6.3.Calcul de largeur de différentes roues :
-calcul de largeur de pignon :
𝑏𝑝𝑖𝑔𝑛𝑜𝑛 = 2 .(𝑟1−𝑟𝑚 1)
𝑠𝑖𝑛 𝛿1
= 𝑑𝑝𝑐,𝑝𝑖𝑔𝑛𝑜𝑛−2.𝑟𝑚1
𝑠𝑖𝑛 𝛿𝑝𝑖𝑔𝑛𝑖𝑜𝑛/𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒
AN : = 104,16−2.46,22
𝑠𝑖𝑛 39,34
𝑏𝑝𝑖𝑔𝑛𝑜𝑛 = 18,48 𝑚𝑚
-calcul de rayon moyen de couronne :
𝑏𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = 2 .(𝑟2−𝑟𝑚 2)
𝑠𝑖𝑛 𝛿1
= 𝑑𝑝𝑐,𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒−2.𝑟𝑚2
𝑠𝑖𝑛 50,
AN : = 237,04−2.102,17
𝑠𝑖𝑛 50,66
𝑏𝑐𝑜𝑢𝑟𝑜𝑛𝑛𝑒 = 18,55 𝑚𝑚
-calcul de rayon moyen de planétaires/satellites :
𝑏𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒𝑙𝑙𝑖𝑡𝑒 = 2 .(𝑟3−𝑟𝑚 3)
𝑠𝑖𝑛 𝛿𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒𝑙𝑙𝑖𝑡𝑒
= 𝑑𝑝,𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒𝑙𝑙𝑖𝑡𝑒−2.𝑟𝑚3
𝑠𝑖𝑛 𝛿𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒𝑙𝑙𝑖𝑡𝑒
AN : = 90,21−2.41,25
𝑠𝑖𝑛 45
b𝑝𝑙𝑎𝑛é𝑡𝑎𝑖𝑟𝑒/𝑠𝑎𝑡𝑒𝑙𝑙𝑖𝑡𝑒 = 10,9 𝑚𝑚

ETUDE ET DIMENSIONNEMENT D’UN PONT DIFFERENTIEL GM2-ENIG
SELMI MARWAN- KHATTABI NADER Page 35
Chapitre III :
Dimensionnement des arbres
Pour les différents arbres on choisit l’Acier 45SCP6 (chrome-silicium-molybdène) figure (14) :