OMB Statement of Administration Policy Re SASC NDAA 2017 Saps2943s_20160607

12"
Conventional Scheduling
• Optimization Problem
min aiPGi2 + biPGi + ci( )
i=1
3
∑PG1,PG 2 ,PG 3
subject to
PGii=1
3
∑ = D kT[ ]
PGi k +1( )T⎡⎣ ⎤⎦ − PGi kT[ ] < Ri ∀i = 1,2,3
PGimin ≤ PGi kT[ ]≤ Pmax
Gi ∀i = 1,2,3
Lacks Long-term Performance Objective
Enhanced Real Time Dispatch
a one-on-one relation between generator’s power output PG
and fuel input F is obtained from Eq. (7), (8) and (9):
PGH1
[KTRTD] = q [KTRTD]PGC
2
[KTRTD] = K1Bfiring [KTRTD]PGG
3
[KTRTD] = ↵��Vinjection [KTRTD](11)
Now, Eq. (10) and (11) results in a mathematical modelto determine real-time energy dispatch (should we mentionsingular control ?). The objective is to minimize the fuel-costF at the system level. The time interval chosen for the system-wide performance objective is 3600 seconds or 12 discreteintervals4:
min J =12X
K=0
�FT [KTRTD]RF [KTRTD]
�
s.t.PG [(K + 1)TRTD] = PG [KTRTD] +KPTRTD!G
�DP (PL [(K + 1)TRTD]� PL [KTRTD])
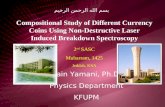
For anticipated load variations (PL [(K + 1)TRTD] �PL [KTRTD]) (Fig. 5), a near-optimal real-time dispatchschedule for H1, C2, G3. As depicted in Fig. 6, sequencesof steady-state schedules for 12 dispatch intervals aredefined as P ref
GH1
, P refGC
2
, P refGG
3
. With respect to conventionaleconomic dispatch (Fig. (7)), enhanced RTD results ina smooth schedules (Fig. 6). In conventional economicdispatch, hard capacity limits for generators were encounteredat 1800 seconds (G3) and 2400 seconds (H1). At 1800seconds the gas power plant reached no-load condition. Thecombustion turbines grid-synchronized at no-load condition,such as gas or diesel generators, consume 23% of therated maximum fuel capacity. Also, the limiting rampingfactor for a combustion turbine is its non-linear temperaturecontrol. The repeated ramping-up and down can causesudden temperature fluctuations in the turbine, resultingin activation of non-linear local temperature controller.This hampers the ramping capability as the generator stopsresponding to the external schedule signal till the turbinecools down to appropriate temperature range. The rampingeffort to follow the load variations is provided only by asingle generator. Under enhanced RTD, all generators arescheduled simultaneously in proportion to their electricaldistances/sensitivities towards loads, i.e., matrix DP . Theproposed well-defined mathematical framework for RTDprovides a smooth system-wide generation schedule, resultingin lesser wear and tear of generators. Again, it must berecalled that the proposed framework is centralized in nature.In Fig. 3, the schedule P ref
GH1
, P refGC
2
, P refGG
3
is communicatedby the system operator to the generators. The observationscan be summarized as:
• Enhanced RTD ensures smooth schedule for the genera-tors, resulting in less wear and tear.
• Ramping effort is distributed among all the participatinggenerators, instead of just the cheapest or the mostexpensive generator.
4Note that the dispatch interval TRTD will depend on the slowest tech-nology in the system. As explained in Section IV, for the 5-bus system it isselected as TRTD = 300 seconds.
• Lower chance of encountering physical limits of genera-tors under distributed ramping effort.
0 500 1000 1500 2000 2500 3000 3500
160
180
200
220
240
260
Time (s)
Dem
an
d (
MW
)
Load at Bus−4
Predicted Demand
0 500 1000 1500 2000 2500 3000 3500100
110
120
130
140
150
160
Time (s)
Dem
an
d (
MW
)
Load at Bus−5
Predicted Demand
Fig. 5: Predicted Load for 5-minute Discrete Time Interval
0 500 1000 1500 2000 2500 3000 350070
80
90
100
110
Feed−Forward Schedule Bus−1 (Hydro−250)
Hydro Bus H−1
0 500 1000 1500 2000 2500 3000 3500100
120
140
160
Sch
ed
ule
d G
en
era
tio
n (
MW
)
Feed−Forward Schedule Bus−2 (Coal−350)
Coal Bus C−2
0 500 1000 1500 2000 2500 3000 3500
90
100
110
120
130
Time (s)
Feed−Forward Schedule Bus−3 (Gas−150)
Diesel Bus G−3
Fig. 6: Generation Schedule: Enhanced RTD
0 500 1000 1500 2000 2500 3000 3500
150
200
250Conventional Dispatch (Hydro−250)
Hydro Bus H−1
0 500 1000 1500 2000 2500 3000 3500
100
140
180
Sch
ed
ule
d G
en
era
tio
n (
MW
)
Conventional Dispatch (Coal−350)
Coal Bus C−2
0 500 1000 1500 2000 2500 3000 35000
10
20
30
Time (s)
Conventional Dispatch (Gas−150)
Gas Bus G−3
Fig. 7: Generation Schedule: Static Economic Dispatch
IV. DESIGN OF PLANT CONTROL
As discussed in the Section II-A, the local controls of agenerator will determine its efficiency and response capabil-ity to real-time schedule adjustments. Given the non-linear
Fuel Minimization : System Efficiency
Network Constraints
Net Cost of Producing Power
Generation equals Demand
Scalar Ramp Constraints
Scalar Ramp Constraints
System Efficiency: Proposed RTD(1)
Conventional Economic Dispatch
Intra-Hour Schedule
a one-on-one relation between generator’s power output PG
and fuel input F is obtained from Eq. (7), (8) and (9):
PGH1
[KTRTD] = q [KTRTD]PGC
2
[KTRTD] = K1Bfiring [KTRTD]PGG
3
[KTRTD] = ↵��Vinjection [KTRTD](11)
Now, Eq. (10) and (11) results in a mathematical modelto determine real-time energy dispatch (should we mentionsingular control ?). The objective is to minimize the fuel-costF at the system level. The time interval chosen for the system-wide performance objective is 3600 seconds or 12 discreteintervals4:
min J =12X
K=0
�FT [KTRTD]RF [KTRTD]
�
s.t.PG [(K + 1)TRTD] = PG [KTRTD] +KPTRTD!G
�DP (PL [(K + 1)TRTD]� PL [KTRTD])
For anticipated load variations (PL [(K + 1)TRTD] �PL [KTRTD]) (Fig. 5), a near-optimal real-time dispatchschedule for H1, C2, G3. As depicted in Fig. 6, sequencesof steady-state schedules for 12 dispatch intervals aredefined as P ref
GH1
, P refGC
2
, P refGG
3
. With respect to conventionaleconomic dispatch (Fig. (7)), enhanced RTD results ina smooth schedules (Fig. 6). In conventional economicdispatch, hard capacity limits for generators were encounteredat 1800 seconds (G3) and 2400 seconds (H1). At 1800seconds the gas power plant reached no-load condition. Thecombustion turbines grid-synchronized at no-load condition,such as gas or diesel generators, consume 23% of therated maximum fuel capacity. Also, the limiting rampingfactor for a combustion turbine is its non-linear temperaturecontrol. The repeated ramping-up and down can causesudden temperature fluctuations in the turbine, resultingin activation of non-linear local temperature controller.This hampers the ramping capability as the generator stopsresponding to the external schedule signal till the turbinecools down to appropriate temperature range. The rampingeffort to follow the load variations is provided only by asingle generator. Under enhanced RTD, all generators arescheduled simultaneously in proportion to their electricaldistances/sensitivities towards loads, i.e., matrix DP . Theproposed well-defined mathematical framework for RTDprovides a smooth system-wide generation schedule, resultingin lesser wear and tear of generators. Again, it must berecalled that the proposed framework is centralized in nature.In Fig. 3, the schedule P ref
GH1
, P refGC
2
, P refGG
3
is communicatedby the system operator to the generators. The observationscan be summarized as:
• Enhanced RTD ensures smooth schedule for the genera-tors, resulting in less wear and tear.
• Ramping effort is distributed among all the participatinggenerators, instead of just the cheapest or the mostexpensive generator.
4Note that the dispatch interval TRTD will depend on the slowest tech-nology in the system. As explained in Section IV, for the 5-bus system it isselected as TRTD = 300 seconds.
• Lower chance of encountering physical limits of genera-tors under distributed ramping effort.
0 500 1000 1500 2000 2500 3000 3500
160
180
200
220
240
260
Time (s)
De
ma
nd
(M
W)
Load at Bus−4
Predicted Demand
0 500 1000 1500 2000 2500 3000 3500100
110
120
130
140
150
160
Time (s)
De
ma
nd
(M
W)
Load at Bus−5
Predicted Demand
Fig. 5: Predicted Load for 5-minute Discrete Time Interval
0 500 1000 1500 2000 2500 3000 350070
80
90
100
110
Feed−Forward Schedule Bus−1 (Hydro−250)
Hydro Bus H−1
0 500 1000 1500 2000 2500 3000 3500100
120
140
160
Sch
ed
ule
d G
en
era
tio
n (
MW
)
Feed−Forward Schedule Bus−2 (Coal−350)
Coal Bus C−2
0 500 1000 1500 2000 2500 3000 3500
90
100
110
120
130
Time (s)
Feed−Forward Schedule Bus−3 (Gas−150)
Diesel Bus G−3
Fig. 6: Generation Schedule: Enhanced RTD
0 500 1000 1500 2000 2500 3000 3500
150
200
250Conventional Dispatch (Hydro−250)
Hydro Bus H−1
0 500 1000 1500 2000 2500 3000 3500
100
140
180
Sch
ed
ule
d G
en
era
tio
n (
MW
)
Conventional Dispatch (Coal−350)
Coal Bus C−2
0 500 1000 1500 2000 2500 3000 35000
10
20
30
Time (s)
Conventional Dispatch (Gas−150)
Gas Bus G−3
Fig. 7: Generation Schedule: Static Economic Dispatch
IV. DESIGN OF PLANT CONTROL
As discussed in the Section II-A, the local controls of agenerator will determine its efficiency and response capabil-ity to real-time schedule adjustments. Given the non-linear
• Smoother Generation Schedule • Distributed Ramping Effort • Hard-limits encountered less often • Network Constraints: Electrical distance
between load and generators • Energy conversion: Critical metric for
system-wide efficiency in terms of fuel
• Excessive ramping of cheapest and expensive generator
• Lack of network constraints • Hard-limits encountered more often • Significant wear and tear • Quadratic cost curves: Energy
conversion dynamics ignored
Comparative Analysis Intra-hour Variations
Intra-Hour Load Following
Near Optimal Fuel Scheduling for Enhanced Real Time Dispatch (RTD) with Diverse Generation Technologies
Nipun Popli1 Marija Ili�1 1 Department of Electrical and Computer Engineering, Carnegie Mellon University, Pittsburgh, PA 15213
Email: [email protected], [email protected]
1
Near Optimal Fuel Scheduling for Enhanced RealTime Dispatch (RTD) with Diverse Generation
TechnologiesNipun Popli Student Member, IEEE and Marija D.Ilic Fellow, IEEE
Abstract—A formal mathematical framework for enhancedeconomic dispatch is proposed as a novel alternative to the staticreal-time dispatch (RTD) being currently implemented by thepower industry. The proposed approach may be seen as a load-following function to schedule diverse generation technologies forfollowing intra-hour variations. Our proposed approach involvespre-scheduling system-wide fuel-input in response to large intra-hour variations in load and wind forecasts.
Index Terms—Real Time Dispatch (RTD), Load Following,Ramp-Rates, Tertiary Control
I. ENHANCED REAL-TIME ENERGY DISPATCH
Prior to deregulation, load was followed using governor-based reserves. For near perfect load forecasts, the expen-diture for governor-based reserves is low. But maintaininghigher reserve margins to follow large variations in windor solar power output is constrained by economic factors,particularly fuel-cost. To avoid increased reserve expenses, aformal-mathematical framework is proposed for efficient pre-scheduling of fuel input, and its real-time1 updates, in antic-ipation of forecasted load or wind variations. A generator’sresponse rate is primarily determined by non-linear energyconversion dynamics of its fuel sub-system. A simplifiedindustry definition is the maximum possible change in poweroutput of a generator over the dispatch interval TRTD, once thegenerator is online R = |�PG
max
|TRTD
. This scalar averaged ramprate is known as generator’s ramp rate. The interval TRTD isdetermined by the duration of real-time markets, i.e., economicdispatch. For all generation technologies, fast or slow, largeor small, the ramp rates are defined over market’s timeinterval TRTD. The proposed framework, based on the energy-conversion dynamics of different generation technologies, isillustrated on 5-bus system in Fig. 1. A near-optimal real-timedispatch schedule (Fig. 3) for hydro H1, coal C2 and gas G3 inanticipation of forecasted load variations (Fig. 2) is obtained.For all generators, sequences of steady-state schedules aredefined for 12 dispatch intervals, as depicted in Fig. 3. Theproposed approach results in a smooth RTD schedules (Fig. 3)as compared to conventional economic dispatch (Fig. (4))by taking into account their energy-conversion dynamics.Proposed RTD results in smoother schedule for the generators
Nipun Popli is with Carnegie Mellon University, Pittsburgh, PA, USA(email: [email protected]).
Marija D. Ilic is with Carnegie Mellon University, Pittsburgh, PA,USA, and Delft University of Technology, Delft, The Netherlands (email:[email protected]).
1Real-time updates in a sense of economic dispatch, i.e., 5-10 minutes.
Fig. 1. 5-bus system
0 500 1000 1500 2000 2500 3000 3500
160
180
200
220
240
260
Time (s)
De
ma
nd
(M
W)
Load at Bus−4
Predicted Demand
0 500 1000 1500 2000 2500 3000 3500100
110
120
130
140
150
160
Time (s)
De
ma
nd
(M
W)
Load at Bus−5
Predicted Demand
Fig. 2. Predicted Load for 5-minute Discrete Time Interval
to follow, resulting in less wear and tear. The ramping effortis distributed among all the participating generators, insteadof just the cheapest or the most expensive generator. Lowerchance of encountering physical limits of generators as com-pared to static economic dispatch approach where only onegenerator is rescheduled at a time.
0 500 1000 1500 2000 2500 3000 350070
80
90
100
110
Feed−Forward Schedule Bus−1 (Hydro−250)
Hydro Bus H−1
0 500 1000 1500 2000 2500 3000 3500100
120
140
160
Sc
he
du
led
Ge
ne
rati
on
(M
W)
Feed−Forward Schedule Bus−2 (Coal−350)
Coal Bus C−2
0 500 1000 1500 2000 2500 3000 3500
90
100
110
120
130
Time (s)
Feed−Forward Schedule Bus−3 (Gas−150)
Diesel Bus G−3
Fig. 3. Generation Schedule under Enhanced RTD
0 500 1000 1500 2000 2500 3000 3500120
125
130
Feed−Forward Schedule Bus−1 (Hydro−250)
Generator Bus H−1
0 500 1000 1500 2000 2500 3000 3500100
200
300
Sc
he
du
led
Ge
ne
rati
on
(M
W)
Feed−Forward Schedule Bus−2 (Coal−350)
Generator Bus C−2
0 500 1000 1500 2000 2500 3000 35000
10
20
30
Time (s)
Feed−Forward Schedule Bus−3 (Gas−150)
Generator Bus G−3
Fig. 4. Generation Schedule under Static RTD
Motivation • High Wind Penetration: Large intra-hour variations • Operating Conditions: Unexpected changes • Significant reserves required for large intra-hour wind
variations • Example CAISO-23rd Feb 2012 • Dynamic Efficiency: Two-fold objective Plant vs. System
Hydro Coal Gas
Loads
forecast PL [kTHA]. The difference between day-ahead fore-cast for unit commitment PL [kTUC ], and the hour-aheadforecast PL [kTHA], is fulfilled by real-time unit commitment.Subsequently, load-following or real-time dispatch (RTD),is performed for each 5 minutes interval. It is an instructeddeviation from the generation schedule based on real-timeforecast updates PL [kTRTD], provided 7.5 minutes beforethe beginning of each 5 minutes interval [3]. The task ofgeneration schedule updates, in response to real-time forecastsPL [kTRTD], is formulated as a static optimization problem.The cost to supply electricity from a generator is modeled as aquadratic function of its power output (PG). The systemwideoptimization involves minimization of sum of quadratic costof generators subject to their physical limits [4], such as ramprate R and the rated generation capacity.
II. EFFICIENCY: A TWO FOLD OBJECTIVE
The heterogenous mix of generation technologies are sched-uled in anticipation of hour-ahead forecast PL [kTHA]. Subse-quently, as described in Section I-B, the schedules are adjustedin response to real-time forecast PL [kTRTD]. To efficientlyschedule generation resources, two chief objectives must beachieved.
A. Plant EfficiencyEach generation technology has a natural efficiency cycle,
i.e., the rate at which it can increase or decrease its poweroutput (PG) with least fuel-input (F ). The generation servingentity (GSE) aims to minimize the fuel expenditure throughappropriate local controls. A generator’s efficiency is subjectto design of its local controls. In addition to efficiency, localcontrols also determine generator’s response capability toschedule adjustments. For example a coal-based power planthas two degree of controls, governor control through valve aand rate of coal firing BFiring . To minimize fuel expenditureit may be operated with its valve a wide open, with responserate being slow. Alternatively, at high boiler pressure, thevalve control can enhance its response capability. The rateof gas or diesel injection VInjection regulates response of thecombustion turbines. For controllable hydro plants, the water-head in the reservoir and the design of surge tank determinesthe dynamic response capability. Smart design of local controlscan effectively enhance generator’s dynamic response. Anideal market mechanism must be established for ramp-product,incentivizing GSE to enhance their response capability throughimproved local controls. It must be noted that ramp-product isqualitatively different from governor-based reserve. It is highlyunsustainable to maintain governor-based reserves in supportof load-following under high wind penetration. For examplein Fig. 2 the wind power output decreases by 700 MW inCalifornia, about 4% of the net load, during early morninghours. In order to balance large predictable variations in real-time forecasts, schedule updates must be based on fuel inputF , and not governor response.
B. System EfficiencyThe simplified approximation of a generator’s ramp rate,
represented by a scalar R (Section I-A), mathematically fails
to capture its dynamic response capability. The ramp rate Rfor all generation technologies is established over time-horizonof real-time markets TRTD. However, for each generator, thetime horizon to update schedule in real-time will depend onits non-linear energy conversion dynamics, design of localcontrol, and characteristics such as capacity/size and type offuel. Consequently, it may be either longer or shorter than real-time market’s interval TRTD. The RTD time-horizon does notrepresents natural efficiency cycles of heterogenous generationtechnologies. A disconnect exists between ramp-rate R anddynamical response of a generator.
Fig. 2: Wind Power Output Profile: California IndependentSystem Operator (ISO)- 23rd Feb 2012
Next, we propose a formal mathematical framework for en-hanced real-time dispatch (RTD). The objective is to efficientlyschedule systemwide fuel-input F for heterogeneous mixof generation technologies. This is in anticipation of intra-hour load variations. As shown in Fig. 3, the systemwidecontrol design is posed as a hierarchical control problem.At top of the hierarchy is the system operator, marked inbrown. The blue lines represents physical system with ⌦denoting the generator and the load buses. The operatorcentrally updates generation schedules in anticipation of loadvariations (PL [(K + 1)TRTD]�PL [KTRTD]). The schedulesare communicated to participating generators, marked in pink.For the non-linear energy conversion dynamics of a generator,its output is hard-to-predict. A smart local control is neededto guarantee improved ramping capability of a generator. Itwill ensure a predictable and smooth closed-loop responseof a generator. In Section III the schedules for generators,retrofitted with smart local controls, are updated using recedinghorizon control/look-ahead dispatch. In Section IV the designof local controls for generators are described. Subsequently,the stability of the interconnected system for the purpose ofload-following must be ensured as well. It may be necessaryto supplement the local controls of generators with minimalglobal information, marked in red (Fig. 3). In Section IV-Dtwo possible frameworks for design of system’s control designframework are illustrated.
III. ENHANCED RTD: PROPOSED FRAMEWORK
The proposed framework for enhanced RTD will be illus-trated on 5-bus system in Fig. 4. It has three generators: ahydro-based generator H1, a coal-fired steam-based generator
• Objective: Minimize net fuel input (system/plant level) • Generator Composition: Three sub-systems • Fuel Subsystem: Non-linear energy conversion dynamics • Design Local Controls: Predictable response of the non-
linear power plants • Non-linearity: Varying operating conditions • Revisit scalar ramp-rates
1
Near Optimal Fuel Scheduling for Load-followingin Electric Energy Systems with Diverse
TechnologiesNipun Popli, Student Member, IEEE, Marija D. Ilic Fellow, IEEE,
Abstract—In this paper, a framework for enhanced economicdispatch is proposed as a novel alternative to the static real-time dispatch (RTD) being currently implemented by the powerindustry. The proposed mathematical framework may be seen asa load-following function to update schedules of heterogeneousgeneration resources in response to balancing intra-hour varia-tions. Our proposed approach involves pre-scheduling generator’sfuel-input in anticipation of large intra-hour variations in loadand wind forecasts.
Index Terms—Tertiary Control, Load-following, Energy Con-version, Economic Dispatch
I. INTRODUCTION
From the perspective of large-scale electric energy sys-tems, the basic operating principle is that the net generationmust follow/balance the net load. An imperfect load follow-ing/balancing results in violations of pre-specified operatingstandards for system operation [1]. Prior to deregulationof electricity markets, load was inherently followed usinggovernor-based reserves. The efficacy of governor controlis contingent on the generation technologies. For example,in coal-based power plants, the steam stored in the boilersdetermines the rate of response. The response rates of fastgenerations resources, particularly combustion turbines andhydro power plants, are based on their size, age, type of fueland local controls. For near perfect load forecasts [2], thecost of balancing through governor-based reserves is low. Butmaintaining higher reserve margins to follow large intra-hourvariations in wind or solar power output is constrained byeconomic factors, particularly fuel-cost. To avoid increasedreserve expenses, a formal-mathematical framework for thepurpose of load-following is proposed in this paper. It may beseen as an efficient pre-scheduling of fuel input, and its real-time1 updates, in anticipation of forecasted load or wind varia-tions. Next subsections summarize industry’s approximation ofgenerator’s response-rate, and its definition of load-following.
A. Ramp RatesA qualitative representation of a generation technology is
depicted in Fig. 1. The energy, produced in the fuel sub-system, is modeled by non-linear energy-conversion dynamics
Nipun Popli is with Carnegie Mellon University, Pittsburgh, PA, USA(email: [email protected]).
Marija D. Ilic is with Carnegie Mellon University, Pittsburgh, PA,USA, and Delft University of Technology, Delft, The Netherlands (email:[email protected]).
1Real-time updates in a sense of economic dispatch, i.e., 5-10 minutes.
of the generation technology. In the mechanical sub-system,marked in blue, the flow of energy into the turbine is regulatedby the governor valve position. The generator’s power outputis received at the electrical sub-system, i.e., the rotor. Thenon-linear energy conversion dynamics of fuel sub-systemdetermines generator’s response rate. However, a simplifiedindustry definition is the maximum possible change in poweroutput of a generator over the dispatch interval TRTD, oncethe generator is online.
R =|�PG
max
|TRTD
(1)
The scalar R (MW/TRTD), defined as generator’s ramp rate,quantifies averaged response rate of a generator. The intervalTRTD is represents the duration of real-time markets, i.e.,economic dispatch. Based on the Independent System Operator(ISO), it can be 5, 10 or 15 minutes. For all generationtechnologies, fast or slow, large or small, the ramp rates aredefined over market’s time interval TRTD.
Fig. 1: Generator’s qualitative representation
B. Load-following
The net load in an electric energy system has three quali-tative components (Eq. (2)): load forecast2 PL [kT ], non-zeromean forecast error �P (t) and white-noise w (t).
PL (t) = PL [kT ] +�PL (t) + w (t) (2)
PL [kT ] = PL [kTUC ] + PL [kTHA] + PL [kTRTD] (3)
The load forecast PL [kT ] has additional sub-components overmultiple time-intervals (Eq. (3)). For example in CaliforniaISO, generation schedules are updated 75 minutes beforethe beginning of an operating hour through hour-ahead load
2Wind forecast is scheduled as negative load.
1
Near Optimal Fuel Scheduling for Load-followingin Electric Energy Systems with Diverse
TechnologiesNipun Popli, Student Member, IEEE, Marija D. Ilic Fellow, IEEE,
Abstract—In this paper, a framework for enhanced economicdispatch is proposed as a novel alternative to the static real-time dispatch (RTD) being currently implemented by the powerindustry. The proposed mathematical framework may be seen asa load-following function to update schedules of heterogeneousgeneration resources in response to balancing intra-hour varia-tions. Our proposed approach involves pre-scheduling generator’sfuel-input in anticipation of large intra-hour variations in loadand wind forecasts.
Index Terms—Tertiary Control, Load-following, Energy Con-version, Economic Dispatch
I. INTRODUCTION
From the perspective of large-scale electric energy sys-tems, the basic operating principle is that the net generationmust follow/balance the net load. An imperfect load follow-ing/balancing results in violations of pre-specified operatingstandards for system operation [1]. Prior to deregulationof electricity markets, load was inherently followed usinggovernor-based reserves. The efficacy of governor controlis contingent on the generation technologies. For example,in coal-based power plants, the steam stored in the boilersdetermines the rate of response. The response rates of fastgenerations resources, particularly combustion turbines andhydro power plants, are based on their size, age, type of fueland local controls. For near perfect load forecasts [2], thecost of balancing through governor-based reserves is low. Butmaintaining higher reserve margins to follow large intra-hourvariations in wind or solar power output is constrained byeconomic factors, particularly fuel-cost. To avoid increasedreserve expenses, a formal-mathematical framework for thepurpose of load-following is proposed in this paper. It may beseen as an efficient pre-scheduling of fuel input, and its real-time1 updates, in anticipation of forecasted load or wind varia-tions. Next subsections summarize industry’s approximation ofgenerator’s response-rate, and its definition of load-following.
A. Ramp RatesA qualitative representation of a generation technology is
depicted in Fig. 1. The energy, produced in the fuel sub-system, is modeled by non-linear energy-conversion dynamics
Nipun Popli is with Carnegie Mellon University, Pittsburgh, PA, USA(email: [email protected]).
Marija D. Ilic is with Carnegie Mellon University, Pittsburgh, PA,USA, and Delft University of Technology, Delft, The Netherlands (email:[email protected]).
1Real-time updates in a sense of economic dispatch, i.e., 5-10 minutes.
of the generation technology. In the mechanical sub-system,marked in blue, the flow of energy into the turbine is regulatedby the governor valve position. The generator’s power outputis received at the electrical sub-system, i.e., the rotor. Thenon-linear energy conversion dynamics of fuel sub-systemdetermines generator’s response rate. However, a simplifiedindustry definition is the maximum possible change in poweroutput of a generator over the dispatch interval TRTD, oncethe generator is online.
R =|�PG
max
|TRTD
(1)
The scalar R (MW/TRTD), defined as generator’s ramp rate,quantifies averaged response rate of a generator. The intervalTRTD is represents the duration of real-time markets, i.e.,economic dispatch. Based on the Independent System Operator(ISO), it can be 5, 10 or 15 minutes. For all generationtechnologies, fast or slow, large or small, the ramp rates aredefined over market’s time interval TRTD.
Fig. 1: Generator’s qualitative representation
B. Load-following
The net load in an electric energy system has three quali-tative components (Eq. (2)): load forecast2 PL [kT ], non-zeromean forecast error �P (t) and white-noise w (t).
PL (t) = PL [kT ] +�PL (t) + w (t) (2)
PL [kT ] = PL [kTUC ] + PL [kTHA] + PL [kTRTD] (3)
The load forecast PL [kT ] has additional sub-components overmultiple time-intervals (Eq. (3)). For example in CaliforniaISO, generation schedules are updated 75 minutes beforethe beginning of an operating hour through hour-ahead load
2Wind forecast is scheduled as negative load.
Dispatch Interval
Maximum Possible Increase in Power Output
Ramp Rate
Local Dynamics(2)
• Hydro Power Plant: Season based parameterization of surge-tank and tunnel flow dynamics
• Coal Power Plant: Non-linear feedback linearization of mill boiler dynamics. Results in time-varying system
• Gas Power Plant: Dynamics of fuel injection and governor valve
Plant Efficiency for Load Following • RTD Generation Schedule: Local
set-point trajectory pre-determined • LQR Gain ‘G’ to perfectly follow
intra-hour load
• Net Fuel Input: System Efficient and Plant Efficient
�
0 ( ) ( )= < < +
= + <
|
J x x Q x x F R F
s tx A x B F WD
min ( )
. .
i i iref T
i i iref
iT
i i
i i i i i i
0
�
�� � � n �
0
( )
( ) ( )
( ) ( ) ( ) ( )
= < < +
= + <
= < <
|
J x x Q x x F R F
s tx A x B F WD
F t F t G x t x t
min ( )
. .
i i iref T
i i iref
iT
i i
i i i i i i
i iref
i i iref
0
System EfficientFuel Schedule Plant Efficient
Real-time Fuel Input
Load Following: Generator Dynamics
Local Frequencies
Net Fuel Inputs
Non-Linear Energy Conversion Dynamics
Observations • Smooth schedule: Hard-limits avoidable • Frequency imperfect at scheduling
Future Work • Market Design for Load Following • Incentivize GSE: Improved control design
for predictable response rate
(1) Nipun Popli, Marija Ili�, “Multi Input Multi Output Tracking of Power Imbalances in Wind Penetrated Electric Power Grids”, TECHON, SRC September 2013 (2) Nipun Popli, Marija Ili�, ”A Possible Framework for Dynamic Generation Scheduling in Large-Scale Power Systems”, Working Paper
0 500 1000 1500 2000 2500 3000 3500−1
−0.5
0
0.5
1Fast Storage Control at Bus−1
Batt
ery
Ou
tpu
t (M
W)
0 500 1000 1500 2000 2500 3000 3500
−0.05
0
0.05
0.1
Fast Storage Control at Bus−2
Batt
ery
Ou
tpu
t (M
W)
Time (s)
Fig. 11: Decentralized Control: Battery Input H1, C2
0 500 1000 1500 2000 2500 3000 3500
0.20.40.60.8
1
Linear Input: Bus−1
Wate
r F
low
(p
.u.)
0 500 1000 1500 2000 2500 3000 3500
0
0.05
0.1
Linear Input: Bus−2C
oal F
irin
g (
p.u
.)
0 500 1000 1500 2000 2500 3000 35000.25
0.3
0.35
Linear Input: Bus−3
Gas F
low
(p
.u.)
Time (s)
Fig. 12: Decentralized Control: Linear Control forH1, C2, G3
0 500 1000 1500 2000 2500 3000 3500
−0.02
−0.01
0
0.01
0.02
Non−linear Input: Bus−2
No
n−
lin
ear
Inp
ut
(p.u
.)
0 500 1000 1500 2000 2500 3000 3500
0
0.05
0.1
Net Input: Bus−2
Net
Inp
ut
(p.u
.)
Time (s)
Fig. 13: Decentralized Control: Non-Linear and Net ControlInput at C2
gain design Gi in preceding subsection. For hydro, the gainis determined as:
min JH1
=/R
0
(⇣xH
1
� xrefH
1
⌘T
QH1
⇣xH
1
� xrefH
1
⌘
+uH1
TRH1
uH1
)s.t.
xH1
= AH1
xH1
+BH1
uH1
�WH1
PG
(38)The net input for hydro is given as:
uH1
(t) = urefH
1
(t)�GH1
⇣xH
1
(t)� xrefH
1
(t)⌘
| {z }�uH
1
(t)
(39)
Similarly, for coal power plant, the gain is determined as:
min J =/R
0
(⇣xC
2
� xrefC
2
⌘T
QC2
⇣xC
2
� xrefC
2
⌘
+uC2
TRC2
uC2
)s.t.
xC2
= AC2
(a [kTv])xC2
+BC2
uC2
�WC2
PG
(40)
The net input is given as:
uC2
(t) = urefC
2
(t)�GC2
[kTv]⇣xC
2
(t)� xrefC
2
(t)⌘
(41)
Next, fast storage devices are placed. It must be noted thatthere already exists a battery next to coal power plant. How-ever, another battery is placed next to slow hydro plant:
UBH1
(t) = �K1BH
1
!GH1
(t)�K2BH
1
!GC2
(t)�K3BH
1
!GG3
(t)(42)
Conseqeuntly the Eq. (32) changes as following:
PG = KP!G �DPPL + Ufast (t)
Ufast (t) =⇥UBH
1
(t) UBC2
(t) 0⇤T (43)
The local gain gas power plant G3 is calculated using the sameapproach as described in previous subsection. The dynamic
0 500 1000 1500 2000 2500 3000 350060
80
100
Generation at Bus−1 (Hydro−250)
0 500 1000 1500 2000 2500 3000 3500100
120
140
160
Generation at Bus−2 (Coal−250)
Gen
era
tio
n (
MW
)
0 500 1000 1500 2000 2500 3000 3500
90
100
110
120
130
Generation at Bus−3 (Gas−150)
Time (s)
Fig. 14: Fast Storage: Dynamic Response of GeneratorsH1, C2, G3
simulations corresponding to load-following with fast storagedevices are shown in Fig. 14, 15, 16, 17, 18.
0 500 1000 1500 2000 2500 3000 350059.9
59.95
60
60.05Frequency at Bus−1 (Hydro−250)
0 500 1000 1500 2000 2500 3000 3500
59.98
60
60.02
60.04
Freqeuncy at Bus−2 (Coal−250)
Fre
qu
en
cy (
Hz)
0 500 1000 1500 2000 2500 3000 3500
59.99
60.01
60.03
Freqeuncy at Bus−3 (Gas−150)
Fig. 15: Fast Storage: Frequency of Generators H1, C2, G3
0 500 1000 1500 2000 2500 3000 3500
−0.1
−0.05
0
0.05Fast Storage Control at Bus−1
Batt
ery
Ou
tpu
t (M
W)
0 500 1000 1500 2000 2500 3000 3500−0.05
0
0.05
Fast Storage Control at Bus−2
Batt
ery
Ou
tpu
t (M
W)
Time (s)
Fig. 16: Fast Storage: Battery Input H1, C2
0 500 1000 1500 2000 2500 3000 3500
0
0.02
0.04
Linear Input: Bus−1
Wate
r F
low
(p
.u.)
0 500 1000 1500 2000 2500 3000 35000
0.05
0.1Linear Input: Bus−2
Co
al F
irin
g (
p.u
.)
0 500 1000 1500 2000 2500 3000 35000.25
0.3
0.35
Linear Input: Bus−3
Gas F
low
(p
.u.)
Time (s)
Fig. 17: Fast Storage: Linear Control for H1, C2, G3
0 500 1000 1500 2000 2500 3000 3500−5
0
5x 10
−3 Non−linear Input: Bus−2
No
n−
lin
ear
Inp
ut
0 500 1000 1500 2000 2500 3000 3500
0.04
0.06
0.08
0.1Net Input: Bus−2
Net
Inp
ut
Time (s)
Fig. 18: Fast Storage: Non-Linear and Net Control Input atC2
C. Comparative AnalysisVI. CONCLUSION
REFERENCES
[1] Schulte R.P., Badley D. E., Problems Associated With Generator LoadFollowing In System Operation, Power Apparatus and Systems, IEEETransactions, vol. PAS-102, no.6, pp.1566-1569, June 1983
[2] Hippert, H.S.; Pedreira, C.E.; Souza, R.C., Neural networks for short-term load forecasting: a review and evaluation, Power Systems, IEEETransactions, vol.16, no.1, pp.44-55, Feb 2001
[3] Y. Makarov, C.Loutan, J. Ma, P. Mello, S. Lu Impacts of Wind Genera-tion on Regulation and Load Following Requirements in the CaliforniaSystem, PES General Meeting Conversion & Delivery of ElectricalEnergy in 21st Century 2008 IEEE
[4] Kirschen, D. S., Strbac, G., Fundamentals of Power System Economics,John Wiley & Sons, New York, 2004
[5] Ostrom, Elinor, A general framework for analyzing sustainability ofsocial-ecological systems, Science (New York, N.Y.), Vol 325, pp 419–422, July 2009
[6] Calovic, M., Dynamic State-Space Models of Electric Power Systems,Technical Report, University of Illinois, Urbana, Illinois, 1971
[7] F.P. deMello, F.P. Emad Boiler Pressure Control Configuration, IEEEWinter Power Meet., N.Y., Jan. 29 - Feb. 3, 1967
[8] Wen Tan and Fang Fang Linear control of a boilerturbine unit: Analysisand design, Proceedings of the 17th World Congress, The InternationalFederation of Automatic Control, Vol. 7, Part-1, Page 10832-10837
[9] Yu Daren, Xu Zhigiang Nonlinear Coordinated Control of Drum BoilerPower Unit Based on Feedback Linearization, IEEE Transaction onEnergy Conversion, Vol. 20, No. 1, March 2005 pp 204-210
[10] W.I.Rowen Simplified Mathematical Representations of Heavy Duty GasTurbines, Transactions of ASME, Vole. 105(l),1983,pp. 865- 869
[11] Nipun Popli, Marjia Ili?, Storage Devices for Automated FrequencyRegulation and Stabilization, IEEE Power Engineering Society GeneralMeeting, July 2014
[12] Sergio Pequito, Clarence Agbi, Nipun Popli, Soummya Kar, A. PedroAguiar and Marija Ilic Designing Decentralized Control Systems withoutStructural Fixed Modes: A Multilayer Approach, To appear in NecSys’13
[13] Dynamic Monitoring and Decision Systems for Enabling SustainableEnergy Services
[14] N. Popli, M. D. Ilic, Modeling and Control Framework to EnsureIntra-Dispatch Regulation Reserves, Chapter 14 in ”Engineering ITEnabled Electricity Services: The Case of Low Cost Green AzoresIslands”, Springer, 2013
0 500 1000 1500 2000 2500 3000 35000
0.01
0.02
0.03Fuel Input: Water Flow
0 500 1000 1500 2000 2500 3000 35000.05
0.06
0.07
0.08
Fuel Input: Coal Firing
Fuel
Inpu
t (p.
u.)
0 500 1000 1500 2000 2500 3000 35000.25
0.3
0.35
Fuel Input: Gas Injection
Time (s)
0 500 1000 1500 2000 2500 3000 3500708090
100110
Enhanced RTD (Hydro−250)
Hydro
0 500 1000 1500 2000 2500 3000 3500100
120
140
160
Sche
dule
d G
ener
atio
n (M
W)
Enhanced RTD (Coal−250)
Coal
0 500 1000 1500 2000 2500 3000 3500
90100110120130
Time (s)
Enhanced RTD (Gas−150)
Gas
0 500 1000 1500 2000 2500 3000 3500
150
200
250Conventional Dispatch (Hydro−250)
Hydro
0 500 1000 1500 2000 2500 3000 3500
100120140160180
Sche
dule
d G
ener
atio
n (M
W)
Conventional Dispatch (Coal−250)
Coal
0 500 1000 1500 2000 2500 3000 35000
10
20
30
Time (s)
Conventional Dispatch (Gas−150)
Gas