abs disc break

of 35
Transcript of abs disc break
-
7/30/2019 abs disc break
1/35
SOLDERING KIT
1. Soldering Iron : As soldering is a process of joining together two metallic parts, the
instrument which is used for doing this job is known as soldering Iron. Thus it is meat for
melting the solder and to set-up the metal parts being joined. Soldering Iron are rated
according to their wattage which varies from 10 200 watts.
2. Solder : The raw material used for soldering is solder. It is composition of
lead & in the good quality solder (a type of flexible naked wire is 60% Tin Led which will
melt between 180 degree to 200 degree C temperature.
3. Flux for Soldering Paste : When the points to soldered is heated, as oxide film forms. This
must be removed at once so that solder may get to the surface of the metal parts. This is adone by applying chemical substances called Flux, which boils under the heat of the iron
remove the oxide formation, and enable the metal to receive the solder.
4. Blade or Knife : To clean the surface &^ leads of components to be soldered is
done by this common instrument.
5. Sand Paper : The oxide formation may attack at the tip of you soldering iron & create
the problem. To prevent this, clean to tip with the help of sand paper time or you may use
blade for doing this job.
Apart from all these tolls discussed above, the working bench for soldering also includes
disordering pump. With wire (used for disordering purpose), file etc.
-
7/30/2019 abs disc break
2/35
CONDENSER MIKE
A microphone is a device, which converts the air pressure variation produced by a
voice or musical instruments in to an electrical variation of the same frequency and
corresponding amplitude. Its primary purpose is to convert sound energy into
electrical energy. It is based on a basic principle to work in the sequence air-
vibration, mechanical vibration and electrical vibration.
The conversation of air vibration in to mechanical vibration is effected mostly by
means of a diaphragm, which work in much same way as the eardrum in the
human ear. In condenser microphone the diaphragm from one plate of an air
capacitor. Battery charges the capacitor to a certain value. The resistance R is
rather large when diaphragm vibrates as a result of sound wave acting on it. The
distance between the plates of the capacitor change therefore the capacitor value
also change and it causes a small AC to flow in the circuit. The AC voltage an
alternating voltage develops.
-
7/30/2019 abs disc break
3/35
SPEAKER
The speaker simply changes electric energy into sound. The speaker is a
transducer. One in a family of devices which converts energy from one form into
another.
The speaker in greatest use today is the permanent magnet (pm) dynamic speaker.
The electrostatic, speaker may be found as part of a speaker system in hi-fi
installations. Electromagnetic dynamic speakers are no longer used, although they
were very popular early in the development of audio systems. Dynamic speakersare similar in operation. They differ in method used to obtain the stationary or
static magnet field. The mechanical construction of a pm speaker.
A permanent magnet concentrates a magnetic field at the pole pieces of highly
permeable housing. The pole pieces are very close together to obtain an intense
magnetic field. A voice coil cemented to the speaker cone is freely suspended
between the magnetic poles. A flexible membrane called the spider is attached to
the voice-coil form and cemented to the speaker frame. The spider centers the
voice coil forms between the speaker poles and keeps it from rubbing against them.
The flared end of the cone is flexibly attached to the speaker frame.
The permanent magnet of a pm speaker is made of a mixture of aluminum, nickel
and cobalt and is called an alnico magnet.
-
7/30/2019 abs disc break
4/35
Electric motor
Electric motors
An electric motor uses electrical energy to producemechanical energy. The reverse process,
that of using mechanical energy to produce electrical energy, is accomplished by a generatorordynamo. Traction motors used on locomotivesoften perform both tasks if the locomotive isequipped with dynamic brakes. Electric motors are found in household appliances such as fans,refrigerators, washing machines, pool pumps, floor vacuums, and fan-forced ovens.
History and development
The principle of conversion of electrical energy into mechanical energy by electromagneticmeans was demonstrated by the British scientistMichael Faraday in 1821 and consisted of afree-hanging wire dipping into a pool ofmercury. A permanent magnetwas placed in the middleof the pool of mercury. When a current was passed through the wire, the wire rotated around themagnet, showing that the current gave rise to a circular magnetic field around the wire. Thismotor is often demonstrated in school physics classes, butbrine (salt water) is sometimes used inplace of the toxic mercury. This is the simplest form of a class of electric motors calledhomopolar motors. A later refinement is the Barlow's Wheel. These were demonstration devices,unsuited to practical applications due to limited power.
The first electric motor using electromagnets for both stationary and rotating parts wasdemonstrated by nyos Jedlikin 1828 Hungary, who later developed a motor powerful enoughto propel a vehicle. The first commutator-type direct-current electric motor capable of a practicalapplication was invented by the British scientist William Sturgeon in 1832. Following Sturgeon'swork, a commutator-type direct-current electric motor made with the intention of commercialuse was built by the AmericanThomas Davenport and patented in 1837. Although several ofthese motors were built and used to operate equipment such as a printing press, due to the highcost ofprimary battery power, the motors were commercially unsuccessful and Davenport wentbankrupt. Several inventors followed Sturgeon in the development of DC motors but allencountered the same cost issues with primary battery power. No electricity distribution had
http://en.wikipedia.org/wiki/Electrical_energyhttp://en.wikipedia.org/wiki/Mechanical_energyhttp://en.wikipedia.org/wiki/Mechanical_energyhttp://en.wikipedia.org/wiki/Electrical_generatorhttp://en.wikipedia.org/wiki/Traction_motorhttp://en.wikipedia.org/wiki/Locomotivehttp://en.wikipedia.org/wiki/Locomotivehttp://en.wikipedia.org/wiki/Dynamic_brakehttp://en.wikipedia.org/wiki/Michael_Faradayhttp://en.wikipedia.org/wiki/Michael_Faradayhttp://en.wikipedia.org/wiki/1821http://en.wikipedia.org/wiki/Mercury_(element)http://en.wikipedia.org/wiki/Magnethttp://en.wikipedia.org/wiki/Magnethttp://en.wikipedia.org/wiki/Current_(electricity)http://en.wikipedia.org/wiki/Brinehttp://en.wikipedia.org/wiki/Homopolar_motorhttp://en.wikipedia.org/wiki/Barlow's_Wheelhttp://en.wikipedia.org/wiki/%C3%81nyos_Jedlikhttp://en.wikipedia.org/wiki/Hungaryhttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/William_Sturgeonhttp://en.wikipedia.org/wiki/Thomas_Davenporthttp://en.wikipedia.org/wiki/Thomas_Davenporthttp://en.wikipedia.org/wiki/Battery_(electricity)http://en.wikipedia.org/wiki/Battery_(electricity)http://en.wikipedia.org/wiki/Image:Motors01CJC.jpghttp://en.wikipedia.org/wiki/Electrical_energyhttp://en.wikipedia.org/wiki/Mechanical_energyhttp://en.wikipedia.org/wiki/Electrical_generatorhttp://en.wikipedia.org/wiki/Traction_motorhttp://en.wikipedia.org/wiki/Locomotivehttp://en.wikipedia.org/wiki/Dynamic_brakehttp://en.wikipedia.org/wiki/Michael_Faradayhttp://en.wikipedia.org/wiki/1821http://en.wikipedia.org/wiki/Mercury_(element)http://en.wikipedia.org/wiki/Magnethttp://en.wikipedia.org/wiki/Current_(electricity)http://en.wikipedia.org/wiki/Brinehttp://en.wikipedia.org/wiki/Homopolar_motorhttp://en.wikipedia.org/wiki/Barlow's_Wheelhttp://en.wikipedia.org/wiki/%C3%81nyos_Jedlikhttp://en.wikipedia.org/wiki/Hungaryhttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/William_Sturgeonhttp://en.wikipedia.org/wiki/Thomas_Davenporthttp://en.wikipedia.org/wiki/Battery_(electricity) -
7/30/2019 abs disc break
5/35
been developed at the time. Like Sturgeon's motor, there was no practical commercial market forthese motors.
The modern DC motor was invented by accident in 1873, when Znobe Gramme connected thedynamo he had invented to a second similar unit, driving it as a motor. TheGramme machine
was the first electric motor that was successful in the industry.
In 1888Nikola Tesla invented the first practicableAC motorand with it the polyphase powertransmission system. Tesla continued his work on the AC motor in the years to follow at theWestinghouse company.
Categorization of electric motors
The classic division of electric motors has been that of DC types vs AC types. This is more a defacto convention, rather than a rigid distinction. For example, many classic DC motors run
happily on AC power.
The ongoing trend toward electronic control further muddles the distinction, as modern drivershave moved the commutator out of the motor shell. For this new breed of motor, driver circuitsare relied upon to generate sinusoidal AC drive currents, or some approximation of. The two bestexamples are: the brushless DC motor, and the stepping motor, both being polyphase AC motorsrequiring external electronic control.
There is a clearer distinction between a synchronous motorand asynchronous types. In thesynchronous types, the rotor rotates in synchrony with the oscillating field or current (eg.permanent magnet motors). In contrast, an asynchronous motor is designed to slip; the most
ubiquitous example being the common AC induction motorwhich must slip in order to generatetorque.
DC motors
A DC motor is designed to run on DC electric power. Two examples of pure DC designs areMichael Faraday'shomopolar motor(which is uncommon), and theball bearing motor, which is(so far) a novelty. By far the most common DC motor types are the brushed and brushless types,which use internal and external commutation respectively to create an oscillating AC currentfrom the DC source -- so they are not purely DC machines in a strict sense.
Brushed DC motors
The classic DC motor design generates an oscillating current in a wound rotor with a split ringcommutator, and either a wound or permanent magnet stator. A rotor consists of a coil woundaround a rotor which is then powered by any type of battery.
http://en.wikipedia.org/wiki/Z%C3%A9nobe_Grammehttp://en.wikipedia.org/wiki/Electrical_generatorhttp://en.wikipedia.org/wiki/Gramme_machinehttp://en.wikipedia.org/wiki/Gramme_machinehttp://en.wikipedia.org/wiki/Nikola_Teslahttp://en.wikipedia.org/wiki/AC_motorhttp://en.wikipedia.org/wiki/AC_motorhttp://en.wikipedia.org/wiki/Synchronous_motorhttp://en.wikipedia.org/wiki/Synchronous_motorhttp://en.wikipedia.org/wiki/Induction_motorhttp://en.wikipedia.org/wiki/Induction_motorhttp://en.wikipedia.org/wiki/Michael_Faradayhttp://en.wikipedia.org/wiki/Homopolar_motorhttp://en.wikipedia.org/wiki/Ball_bearing_motorhttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Z%C3%A9nobe_Grammehttp://en.wikipedia.org/wiki/Electrical_generatorhttp://en.wikipedia.org/wiki/Gramme_machinehttp://en.wikipedia.org/wiki/Nikola_Teslahttp://en.wikipedia.org/wiki/AC_motorhttp://en.wikipedia.org/wiki/Synchronous_motorhttp://en.wikipedia.org/wiki/Induction_motorhttp://en.wikipedia.org/wiki/Michael_Faradayhttp://en.wikipedia.org/wiki/Homopolar_motorhttp://en.wikipedia.org/wiki/Ball_bearing_motorhttp://en.wikipedia.org/wiki/Commutator_(electric) -
7/30/2019 abs disc break
6/35
Many of the limitations of the classiccommutatorDC motor are due to the need for brushes topress against the commutator. This creates friction. At higher speeds, brushes have increasingdifficulty in maintaining contact. Brushes may bounce off the irregularities in the commutatorsurface, creating sparks. This limits the maximum speed of the machine. The current density perunit area of the brushes limits the output of the motor. The imperfect electric contact also causes
electrical noise. Brushes eventually wear out and require replacement, and the commutator itselfis subject to wear and maintenance. The commutator assembly on a large machine is a costlyelement, requiring precision assembly of many parts.
Brushless DC motors
Some of the problems of the brushed DC motor are eliminated in the brushless design. In thismotor, the mechanical "rotating switch" or commutator/brushgear assembly is replaced by anexternal electronic switch synchronised to the rotor's position. Brushless motors are typically 85-90% efficient, whereas DC motors with brushgear are typically 75-80% efficient.
Midway between ordinary DCmotors and stepper motors lies the realm of thebrushless DCmotor. Built in a fashion very similar to stepper motors, these often use a permanent magnetexternal rotor, three phases of driving coils, one or moreHall effect sensors to sense the positionof the rotor, and the associated drive electronics. The coils are activated, one phase after theother, by the drive electronics as cued by the signals from the Hall effect sensors. In effect, theyact as three-phase synchronous motors containing their ownvariable-frequency drive electronics.A specialized class of brushless DC motor controllers utilize EMF feedback through the mainphase connections instead of Hall effect sensors to determine position and velocity. These motorsare used extensively in electric radio-controlledvehicles. When configured with the magnets onthe outside, these are referred to by modelists as outrunner motors.
Brushless DC motors are commonly used where precise speed control is necessary, as incomputerdisk drives or in video cassette recorders, the spindles within CD, CD-ROM (etc.)drives, and mechanisms within office products such as fans, laser printersandphotocopiers.They have several advantages over conventional motors:
Compared to AC fans using shaded-pole motors, they are very efficient, running muchcooler than the equivalent AC motors. This cool operation leads to much-improved life ofthe fan'sbearings.
Without a commutatorto wear out, the life of a DC brushless motor can be significantlylonger compared to a DC motor using brushes and a commutator. Commutation alsotends to cause a great deal of electrical and RF noise; without a commutator or brushes, a
brushless motor may be used in electrically sensitive devices like audio equipment orcomputers. The same Hall effect sensors that provide the commutation can also provide a convenient
tachometersignal for closed-loop control (servo-controlled) applications. In fans, thetachometer signal can be used to derive a "fan OK" signal.
The motor can be easily synchronized to an internal or external clock, leading to precisespeed control.
http://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Frictionhttp://en.wikipedia.org/wiki/Frictionhttp://en.wikipedia.org/wiki/Electrical_noisehttp://en.wikipedia.org/wiki/Electrical_noisehttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Stepper_motorhttp://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Hall_effect_sensorhttp://en.wikipedia.org/wiki/Hall_effect_sensorhttp://en.wikipedia.org/wiki/Variable-frequency_drivehttp://en.wikipedia.org/wiki/Variable-frequency_drivehttp://en.wikipedia.org/wiki/Radio_controlhttp://en.wikipedia.org/wiki/Radio_controlhttp://en.wikipedia.org/wiki/Disk_drivehttp://en.wikipedia.org/wiki/Video_cassette_recorderhttp://en.wikipedia.org/wiki/CDhttp://en.wikipedia.org/wiki/CD-ROMhttp://en.wikipedia.org/wiki/Fan_(mechanical)http://en.wikipedia.org/wiki/Laser_printerhttp://en.wikipedia.org/wiki/Laser_printerhttp://en.wikipedia.org/wiki/Photocopierhttp://en.wikipedia.org/wiki/Photocopierhttp://en.wikipedia.org/wiki/Bearinghttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Tachometerhttp://en.wikipedia.org/wiki/Tachometerhttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Frictionhttp://en.wikipedia.org/wiki/Electrical_noisehttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Stepper_motorhttp://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Hall_effect_sensorhttp://en.wikipedia.org/wiki/Variable-frequency_drivehttp://en.wikipedia.org/wiki/Radio_controlhttp://en.wikipedia.org/wiki/Disk_drivehttp://en.wikipedia.org/wiki/Video_cassette_recorderhttp://en.wikipedia.org/wiki/CDhttp://en.wikipedia.org/wiki/CD-ROMhttp://en.wikipedia.org/wiki/Fan_(mechanical)http://en.wikipedia.org/wiki/Laser_printerhttp://en.wikipedia.org/wiki/Photocopierhttp://en.wikipedia.org/wiki/Bearinghttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Tachometer -
7/30/2019 abs disc break
7/35
Brushless motors have no chance of sparking, unlike brushed motors, making them bettersuited to environments with volatile chemicals and fuels.
Brushless motors are usually used in small equipment such as computers and aregenerally used to get rid of unwanted heat.
They are also very quiet motors which is an advantage if being used in equipment that is
affected by vibrations.
Modern DC brushless motors range in power from a fraction of a watt to many kilowatts. Largerbrushless motors up to about 100 kW rating are used in electric vehicles. They also findsignificant use in high-performance electric model aircraft.
Coreless DC motors
Nothing in the design of any of the motors described above requires that the iron (steel) portionsof the rotor actually rotate; torque is exerted only on the windings of the electromagnets. Takingadvantage of this fact is the coreless DC motor, a specialized form of a brush or brushless DC
motor. Optimized for rapid acceleration, these motors have a rotor that is constructed withoutany iron core. The rotor can take the form of a winding-filled cylinder inside thestatormagnets,a basket surrounding the stator magnets, or a flatpancake (possibly formed on aprinted wiringboard) running between upper and lower stator magnets. The windings are typically stabilized bybeing impregnated with Electrical epoxypotting systems. Filled epoxies that have moderatemixed viscosity and a long gel time. These systems are highlighted by low shrinkage and lowexotherm. Typically UL 1446 recognized as a potting compound for use up to 180C (Class H)UL File No. E 210549.
Because the rotor is much lighter in weight (mass) than a conventional rotor formed from copperwindings on steel laminations, the rotor can accelerate much more rapidly, often achieving a
mechanical time constant under 1 ms. This is especially true if the windings use aluminum ratherthan the heavier copper. But because there is no metal mass in the rotor to act as a heat sink, evensmall coreless motors must often be cooled by forced air.
These motors were commonly used to drive the capstan(s) ofmagnetic tape drives and are stillwidely used in high-performance servo-controlled systems, like radio-controlledvehicles/aircraft, humanoid roboticsystems, industrial automation, medical devices, etc.
Universal motors
A variant of the wound field DC motor is the universal motor. The name derives from the factthat it may use AC or DC supply current, although in practice they are nearly always used withAC supplies. The principle is that in a wound field DC motor the current in both the field and thearmature (and hence the resultant magnetic fields) will alternate (reverse polarity) at the sametime, and hence the mechanical force generated is always in the same direction. In practice, themotor must be specially designed to cope with the AC current (impedancemust be taken intoaccount, as must the pulsating force), and the resultant motor is generally less efficient than anequivalent pure DC motor. Operating at normal power line frequencies, the maximum output of
http://en.wikipedia.org/wiki/Watthttp://en.wikipedia.org/wiki/Accelerationhttp://en.wikipedia.org/wiki/Statorhttp://en.wikipedia.org/wiki/Statorhttp://en.wikipedia.org/wiki/Statorhttp://en.wikipedia.org/wiki/Printed_wiring_boardhttp://en.wikipedia.org/wiki/Printed_wiring_boardhttp://en.wikipedia.org/wiki/Printed_wiring_boardhttp://en.wikipedia.org/wiki/Epoxyhttp://en.wikipedia.org/wiki/Epoxyhttp://en.wikipedia.org/wiki/Masshttp://en.wikipedia.org/wiki/Copperhttp://en.wikipedia.org/wiki/Steelhttp://en.wikipedia.org/wiki/Time_constanthttp://en.wikipedia.org/wiki/Millisecondhttp://en.wikipedia.org/wiki/Millisecondhttp://en.wikipedia.org/wiki/Aluminiumhttp://en.wikipedia.org/wiki/Capstanhttp://en.wikipedia.org/wiki/Magnetic_tapehttp://en.wikipedia.org/wiki/Robotichttp://en.wikipedia.org/wiki/Robotichttp://en.wikipedia.org/wiki/Armature_(electrical_engineering)http://en.wikipedia.org/wiki/Electrical_impedancehttp://en.wikipedia.org/wiki/Electrical_impedancehttp://en.wikipedia.org/wiki/Watthttp://en.wikipedia.org/wiki/Accelerationhttp://en.wikipedia.org/wiki/Statorhttp://en.wikipedia.org/wiki/Printed_wiring_boardhttp://en.wikipedia.org/wiki/Printed_wiring_boardhttp://en.wikipedia.org/wiki/Epoxyhttp://en.wikipedia.org/wiki/Masshttp://en.wikipedia.org/wiki/Copperhttp://en.wikipedia.org/wiki/Steelhttp://en.wikipedia.org/wiki/Time_constanthttp://en.wikipedia.org/wiki/Millisecondhttp://en.wikipedia.org/wiki/Aluminiumhttp://en.wikipedia.org/wiki/Capstanhttp://en.wikipedia.org/wiki/Magnetic_tapehttp://en.wikipedia.org/wiki/Robotichttp://en.wikipedia.org/wiki/Armature_(electrical_engineering)http://en.wikipedia.org/wiki/Electrical_impedance -
7/30/2019 abs disc break
8/35
universal motors is limited and motors exceeding one kilowatt are rare. But universal motors alsoform the basis of the traditional railway traction motorinelectric railways. In this application, tokeep their electrical efficiency high, they were operated from very low frequency AC supplies,with 25 Hz and 16 2/3 hertz operation being common. Because they are universal motors,locomotives using this design were also commonly capable of operating from a third rail
powered by DC.
The advantage of the universal motor is that AC supplies may be used on motors which have thetypical characteristics of DC motors, specifically high starting torque and very compact design ifhigh running speeds are used. The negative aspect is the maintenance and short life problemscaused by the commutator. As a result such motors are usually used in AC devices such as foodmixers and power tools which are used only intermittently. Continuous speed control of auniversal motor running on AC is very easily accomplished using a thyristorcircuit, whilestepped speed control can be accomplished using multiple taps on the field coil. Householdblenders that advertise many speeds frequently combine a field coil with several taps and a diodethat can be inserted in series with the motor (causing the motor to run on half-wave rectified
AC).Universal motors can rotate at relatively high revolutions per minute (rpm). This makes themuseful for appliances such asblenders,vacuum cleaners, and hair dryers where high-speedoperation is desired. Many vacuum cleaner and weed trimmermotors exceed 10,000 rpm,Dremel and other similar miniature grinders will often exceed 30,000 rpm. Motor damage mayoccur due to overspeed (rpm in excess of design specifications) if the unit is operated with nosignificant load. On larger motors, sudden loss of load is to be avoided, and the possibility ofsuch an occurrence is incorporated into the motor's protection and control schemes. Often, asmall fan blade attached to the armature acts as an artificial load to limit the motor speed to asafe value, as well as provide cooling airflow to the armature and field windings.
With the very low cost ofsemiconductorrectifiers, some applications that would have previouslyused a universal motor now use a pure DC motor, sometimes with a permanent magnet field.
AC motors
In 1882,Nikola Tesla identified the rotating magnetic field principle, and pioneered the use of arotary field of force to operate machines. He exploited the principle to design a unique two-phaseinduction motor in 1883. In 1885,Galileo Ferraris independently researched the concept. In1888, Ferraris published his research in a paper to the Royal Academy of Sciences in Turin.
Introduction of Tesla's motor from 1888 onwards initiated what is sometimes referred to as theSecond Industrial Revolution, making possible the efficient generation and long distancedistribution of electrical energy using the alternating current transmission system, also of Tesla'sinvention (1888).[1] Before the invention of the rotating magnetic field, motors operated bycontinually passing a conductor through a stationary magnetic field (as inhomopolar motors).
http://en.wikipedia.org/wiki/Traction_motorhttp://en.wikipedia.org/wiki/Traction_motorhttp://en.wikipedia.org/wiki/Railway_electrification_system#Low-frequency_alternating_currenthttp://en.wikipedia.org/wiki/Railway_electrification_system#Low-frequency_alternating_currenthttp://en.wikipedia.org/wiki/Third_railhttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Thyristorhttp://en.wikipedia.org/wiki/Diodehttp://en.wikipedia.org/wiki/Blender_(device)http://en.wikipedia.org/wiki/Vacuum_cleanerhttp://en.wikipedia.org/wiki/Vacuum_cleanerhttp://en.wikipedia.org/wiki/Hair_dryerhttp://en.wikipedia.org/wiki/String_trimmerhttp://en.wikipedia.org/wiki/Dremelhttp://en.wikipedia.org/wiki/Semiconductorhttp://en.wikipedia.org/wiki/Rectifierhttp://en.wikipedia.org/wiki/Nikola_Teslahttp://en.wikipedia.org/wiki/Alternatorhttp://en.wikipedia.org/wiki/Galileo_Ferrarishttp://en.wikipedia.org/wiki/Galileo_Ferrarishttp://en.wikipedia.org/wiki/Second_Industrial_Revolutionhttp://en.wikipedia.org/wiki/#cite_note-0http://en.wikipedia.org/wiki/Homopolar_motorhttp://en.wikipedia.org/wiki/Homopolar_motorhttp://en.wikipedia.org/wiki/Traction_motorhttp://en.wikipedia.org/wiki/Railway_electrification_system#Low-frequency_alternating_currenthttp://en.wikipedia.org/wiki/Third_railhttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Thyristorhttp://en.wikipedia.org/wiki/Diodehttp://en.wikipedia.org/wiki/Blender_(device)http://en.wikipedia.org/wiki/Vacuum_cleanerhttp://en.wikipedia.org/wiki/Hair_dryerhttp://en.wikipedia.org/wiki/String_trimmerhttp://en.wikipedia.org/wiki/Dremelhttp://en.wikipedia.org/wiki/Semiconductorhttp://en.wikipedia.org/wiki/Rectifierhttp://en.wikipedia.org/wiki/Nikola_Teslahttp://en.wikipedia.org/wiki/Alternatorhttp://en.wikipedia.org/wiki/Galileo_Ferrarishttp://en.wikipedia.org/wiki/Second_Industrial_Revolutionhttp://en.wikipedia.org/wiki/#cite_note-0http://en.wikipedia.org/wiki/Homopolar_motor -
7/30/2019 abs disc break
9/35
Tesla had suggested that the commutators from a machine could be removed and the devicecould operate on a rotary field of force. Professor Poeschel, his teacher, stated that would be akinto building aperpetual motion machine.[2] Tesla would later attain U.S. Patent 0,416,194 ,Electric Motor(December 1889), which resembles the motor seen in many of Tesla's photos.This classic alternating current electro-magnetic motor was an induction motor.
Michail Osipovich Dolivo-Dobrovolsky later invented a three-phase "cage-rotor" in 1890. Thistype of motor is now used for the vast majority of commercial applications.
Components
A typical AC motor consists of two parts:
1. An outside stationary stator having coils supplied with AC current to produce a rotatingmagnetic field, and;
2. An inside rotor attached to the output shaft that is given a torque by the rotating field.
Torque motors
A torque motor is a specialized form ofinduction motorwhich is capable of operatingindefinitely at stall (with the rotorblocked from turning) without damage. In this mode, themotor will apply a steady stall torque to the load (hence the name). A common application of atorque motor would be the supply- and take-upreel motors in atape drive. In this application,driven from a low voltage, the characteristics of these motors allow a relatively-constant lighttension to be applied to the tape whether or not the capstanis feeding tape past the tape heads.Driven from a higher voltage, (and so delivering a higher torque), the torque motors can also
achieve fast-forward and rewind operation without requiring any additional mechanics such asgearsorclutches. In the computer world, torque motors are used withforce feedbacksteeringwheels.
Slip ring
The slip ring or wound rotor motor is an induction machine where the rotor comprises a set ofcoils that are terminated in slip ringsto which external impedances can be connected. The statoris the same as is used with a standard squirrel cage motor.
By changing the impedance connected to the rotor circuit, the speed/current and speed/torquecurves can be altered.
The slip ring motor is used primarily to start a high inertia load or a load that requires a very highstarting torque across the full speed range. By correctly selecting the resistors used in thesecondary resistance or slip ring starter, the motor is able to produce maximum torque at arelatively low current from zero speed to full speed. A secondary use of the slip ring motor is toprovide a means of speed control. Because the torque curve of the motor is effectively modified
http://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Perpetual_motion_machinehttp://en.wikipedia.org/wiki/#cite_note-1http://patft.uspto.gov/netacgi/nph-Parser?patentnumber=0416194http://en.wikipedia.org/wiki/Michail_Osipovich_Dolivo-Dobrovolskyhttp://en.wikipedia.org/wiki/Induction_motorhttp://en.wikipedia.org/wiki/Stall_(engine)http://en.wikipedia.org/wiki/Rotor_(electric)http://en.wikipedia.org/wiki/Stall_torquehttp://en.wikipedia.org/wiki/Reelhttp://en.wikipedia.org/wiki/Reelhttp://en.wikipedia.org/wiki/Tape_drivehttp://en.wikipedia.org/wiki/Tape_drivehttp://en.wikipedia.org/wiki/Tape_drivehttp://en.wikipedia.org/wiki/Capstan_(tape_recorder)http://en.wikipedia.org/wiki/Capstan_(tape_recorder)http://en.wikipedia.org/wiki/Gearhttp://en.wikipedia.org/wiki/Gearhttp://en.wikipedia.org/wiki/Clutchhttp://en.wikipedia.org/wiki/Haptichttp://en.wikipedia.org/wiki/Haptichttp://en.wikipedia.org/wiki/Slip_ringhttp://en.wikipedia.org/wiki/Slip_ringhttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Perpetual_motion_machinehttp://en.wikipedia.org/wiki/#cite_note-1http://patft.uspto.gov/netacgi/nph-Parser?patentnumber=0416194http://www.pat2pdf.org/pat2pdf/foo.pl?number=0416194http://en.wikipedia.org/wiki/Michail_Osipovich_Dolivo-Dobrovolskyhttp://en.wikipedia.org/wiki/Induction_motorhttp://en.wikipedia.org/wiki/Stall_(engine)http://en.wikipedia.org/wiki/Rotor_(electric)http://en.wikipedia.org/wiki/Stall_torquehttp://en.wikipedia.org/wiki/Reelhttp://en.wikipedia.org/wiki/Tape_drivehttp://en.wikipedia.org/wiki/Capstan_(tape_recorder)http://en.wikipedia.org/wiki/Gearhttp://en.wikipedia.org/wiki/Clutchhttp://en.wikipedia.org/wiki/Haptichttp://en.wikipedia.org/wiki/Slip_ring -
7/30/2019 abs disc break
10/35
by the resistance connected to the rotor circuit, the speed of the motor can be altered. Increasingthe value of resistance on the rotor circuit will move the speed of maximum torque down. If theresistance connected to the rotor is increased beyond the point where the maximum torque occursat zero speed, the torque will be further reduced.
When used with a load that has a torque curve that increases with speed, the motor will operateat the speed where the torque developed by the motor is equal to the load torque. Reducing theload will cause the motor to speed up, and increasing the load will cause the motor to slow downuntil the load and motor torque are equal. Operated in this manner, the slip losses are dissipatedin the secondary resistors and can be very significant. The speed regulation is also very poor.
Stepper motors
Closely related in design to three-phase AC synchronous motors are stepper motors, where an
internal rotor containing permanent magnets or a large iron core with salient poles is controlledby a set of external magnets that are switched electronically. A stepper motor may also bethought of as a cross between a DC electric motor and a solenoid. As each coil is energized inturn, the rotor aligns itself with the magnetic field produced by the energized field winding.Unlike a synchronous motor, in its application, the motor may not rotate continuously; instead, it"steps" from one position to the next as field windings are energized and de-energized insequence. Depending on the sequence, the rotor may turn forwards or backwards.
Simple stepper motor drivers entirely energize or entirely de-energize the field windings, leadingthe rotor to "cog" to a limited number of positions; more sophisticated drivers can proportionallycontrol the power to the field windings, allowing the rotors to position between the cog points
and thereby rotate extremely smoothly. Computer controlled stepper motors are one of the mostversatile forms of positioning systems, particularly when part of a digitalservo-controlledsystem.
Stepper motors can be rotated to a specific angle with ease, and hence stepper motors are used inpre-gigabyte era computer disk drives, where the precision they offered was adequate for thecorrect positioning of the read/write head of a hard disk drive. As drive density increased, theprecision limitations of stepper motors made them obsolete for hard drives, thus newer hard diskdrives use read/write head control systems based on voice coils.
Stepper motors were upscaled to be used in electric vehicles under the term SRM (switched
reluctance machine).
Linear motors
A linear motoris essentially an electric motor that has been "unrolled" so that, instead ofproducing a torque (rotation), it produces a linear force along its length by setting up a travelingelectromagnetic field.
http://en.wikipedia.org/wiki/Stepper_motorhttp://en.wikipedia.org/wiki/Solenoidhttp://en.wikipedia.org/wiki/Coghttp://en.wikipedia.org/wiki/Servomechanismhttp://en.wikipedia.org/wiki/Servomechanismhttp://en.wikipedia.org/wiki/Voice_coilhttp://en.wikipedia.org/wiki/Linear_motorhttp://en.wikipedia.org/wiki/Torquehttp://en.wikipedia.org/wiki/Stepper_motorhttp://en.wikipedia.org/wiki/Solenoidhttp://en.wikipedia.org/wiki/Coghttp://en.wikipedia.org/wiki/Servomechanismhttp://en.wikipedia.org/wiki/Voice_coilhttp://en.wikipedia.org/wiki/Linear_motorhttp://en.wikipedia.org/wiki/Torque -
7/30/2019 abs disc break
11/35
Linear motors are most commonly induction motors or stepper motors. You can find a linearmotor in amaglev (Transrapid) train, where the train "flies" over the ground, and in many roller-coasters where the rapid motion of the motorless railcar is controlled by the rail.
Doubly-fed electric motor
Doubly-fed electric motors have two independent multiphase windings that actively participatein the energy conversion process with at least one of the winding sets electronically controlledfor variable speed operation. Two is the most active multiphase winding sets possible withoutduplicating singly-fed or doubly-fed categories in the same package. As a result, doubly-fedelectric motors are machines with an effective constant torque speed range that is twicesynchronous speed for a given frequency of excitation. This is twice the constant torque speedrange as singly-fed electric machines, which have only one active winding set.
A doubly-fed motor allows for a smaller electronic converter but the cost of the rotor winding
and slip rings may offset the saving in the power electronics components. Difficulties withcontrolling speed near synchronous speed limit applications.[3]
Singly-fed electric motor
Singly-fed electric machinesincorporate a single multiphase winding set that is connected to apower supply. Singly-fed electric machines may be either induction or synchronous. The activewinding set can be electronically controlled. Induction machines develop starting torque at zerospeed and can operate as standalone machines. Synchronous machines must have auxiliarymeans for startup, such as a starting induction squirrel-cage winding or an electronic controller.
Singly-fed electric machines have an effective constant torque speed range up to synchronousspeed for a given excitation frequency.
The induction (asynchronous) motors (i.e., squirrel cage rotor or wound rotor), synchronousmotors (i.e., field-excited, permanent magnet or brushless DC motors, reluctance motors, etc.),which are discussed on the this page, are examples of singly-fed motors. By far, singly-fedmotors are the predominantly installed type of motors.
Nanotube nanomotor
Researchers atUniversity of California, Berkeley, recently developed rotational bearings basedupon multiwall carbon nanotubes. By attaching a gold plate (with dimensions of the order of100nm) to the outer shell of a suspended multiwall carbon nanotube (like nested carboncylinders), they are able to electrostatically rotate the outer shell relative to the inner core. Thesebearings are very robust; devices have been oscillated thousands of times with no indication ofwear. These nanoelectromechanical systems (NEMS) are the next step in miniaturization thatmay find their way into commercial aspects in the future.
http://en.wikipedia.org/wiki/Maglev_trainhttp://en.wikipedia.org/wiki/Maglev_trainhttp://en.wikipedia.org/wiki/Transrapidhttp://en.wikipedia.org/wiki/Doubly-fed_electric_machinehttp://en.wikipedia.org/wiki/Singly-fed_electric_machinehttp://en.wikipedia.org/wiki/#cite_note-2http://en.wikipedia.org/wiki/Singly-fed_electric_machinehttp://en.wikipedia.org/wiki/Singly-fed_electric_machinehttp://en.wikipedia.org/wiki/University_of_California%2C_Berkeleyhttp://en.wikipedia.org/wiki/University_of_California%2C_Berkeleyhttp://en.wikipedia.org/wiki/University_of_California%2C_Berkeleyhttp://en.wikipedia.org/wiki/Maglev_trainhttp://en.wikipedia.org/wiki/Transrapidhttp://en.wikipedia.org/wiki/Doubly-fed_electric_machinehttp://en.wikipedia.org/wiki/Singly-fed_electric_machinehttp://en.wikipedia.org/wiki/#cite_note-2http://en.wikipedia.org/wiki/Singly-fed_electric_machinehttp://en.wikipedia.org/wiki/University_of_California%2C_Berkeley -
7/30/2019 abs disc break
12/35
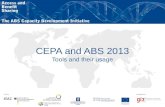
Stepper motorThe top electromagnet (1) is turned on, attracting the nearest teeth of a gear-shaped iron rotor.With the teeth aligned to electromagnet 1, they will be slightly offset from electromagnet 2.
The top electromagnet (1) is turned off, and the right electromagnet (2) is energized, pulling
the nearest teeth slightly to the right. This results in a rotation of 3.6 in this example.The bottom electromagnet (3) is energized; another 3.6 rotation occurs.
The left electromagnet (4) is enabled, rotating again by 3.6. When the top electromagnet (1)is again enabled, the teeth in the sprocket will have rotated by one tooth position; since thereare 25 teeth, it will take 100 steps to make a full rotation in this example.
Because of power requirements, induction of the windings, and temperature management,motors cannot be directly powered by most digital controllers. Some "glue circuitry," such as amotor controller (H-bridge) is necessary between digital controller and motor. The aboveimage shows the basic circuit of a motor controller which can also sense motor current. (One
wire of the motor is shown; a stepper motor would require such a circuit for four wires, and anormal DC motor for two. This circuitry is typically all included in an integrated H-bridgechip.
Different details of configuration have to be decided when choosing a motor. Almosteverything is combineable
A stepper motor is abrushless, synchronouselectric motorthat can divide a full rotation into alarge number of steps. The motor's position can be controlled precisely, without any feedbackmechanism (see open loop control). Stepper motors are similar to switched reluctance motors,which are very large stepping motors with a reduced pole count, and generally are closed-loop
commutated.
Fundamentals of operation
Stepper motors operate much differently from normal DC motors, which rotate when voltage isapplied to their terminals. Stepper motors, on the other hand, effectively have multiple "toothed"electromagnets arranged around a central gear-shaped piece of iron. The electromagnets areenergized by an external control circuit, such as amicrocontroller. To make the motor shaft turn,first one electromagnet is given power, which makes the gear's teeth magnetically attracted to theelectromagnet's teeth. When the gear's teeth are thus aligned to the first electromagnet, they are
slightly offset from the next electromagnet. So when the next electromagnet is turned on and thefirst is turned off, the gear rotates slightly to align with the next one, and from there the processis repeated. Each of those slight rotations is called a "step." In that way, the motor can be turneda precise angle.
http://en.wikipedia.org/wiki/H-bridgehttp://en.wikipedia.org/wiki/H-bridgehttp://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Electric_motorhttp://en.wikipedia.org/wiki/Electric_motorhttp://en.wikipedia.org/wiki/Open_loophttp://en.wikipedia.org/wiki/Reluctance_motorhttp://en.wikipedia.org/wiki/Reluctance_motorhttp://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/H-bridgehttp://en.wikipedia.org/wiki/H-bridgehttp://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Electric_motorhttp://en.wikipedia.org/wiki/Open_loophttp://en.wikipedia.org/wiki/Reluctance_motorhttp://en.wikipedia.org/wiki/Microcontroller -
7/30/2019 abs disc break
13/35
Stepper motor characteristics
Stepper motors are constant-power devices (power = angular velocity x torque). As motor speedincreases, torque decreases. The torque curve may be extended by using current limiting drivers
and increasing the driving voltage.
Steppers exhibit more vibration than other motor types, as the discrete step tends to snap therotor from one position to another. This vibration can become very bad at some speeds and cancause the motor to lose torque. The effect can be mitigated by accelerating quickly through theproblem speed range, physically damping the system, or using a micro-stepping driver. Motorswith greater number of phases also exhibit smoother operation than those with fewer phases.
Open-loop versus closed-loop commutation
Steppers are generally commutated open loop, ie. the driver has no feedback on where the rotoractually is. Stepper motor systems must thus generally be over engineered, especially if the loadinertia is high, or there is widely varying load, so that there is no possibility that the motor willlose steps. This has often caused the system designer to consider the trade-offs between a closelysized but expensive servo system and an oversized but relatively cheap stepper.
A new development in stepper control is to incorporate a rotor position feedback (eg. an encoderorresolver), so that the commutation can be made optimal for torque generation according toactual rotor position. This turns the stepper motor into a high pole count brushless servo motor,with exceptional low speed torque and position resolution. An advance on this technique is tonormally run the motor in open loop mode, and only enter closed loop mode if the rotor position
error becomes too large -- this will allow the system to avoid hunting or oscillating, a commonservo problem.
Two-phase stepper motors
There are two basic winding arrangements for the electromagnetic coils in a two phase steppermotor: bipolar and unipolar.
Unipolar motors
A unipolar stepper motor has logically two windings per phase, one for each direction of current.Since in this arrangement a magnetic pole can be reversed without switching the direction ofcurrent, the commutation circuit can be made very simple (eg. a single transistor) for eachwinding. Typically, given a phase, one end of each winding is made common: giving three leadsper phase and six leads for a typical two phase motor. Often, these two phase commons areinternally joined, so the motor has only five leads.
http://en.wikipedia.org/wiki/Encoderhttp://en.wikipedia.org/wiki/Resolverhttp://en.wikipedia.org/wiki/Encoderhttp://en.wikipedia.org/wiki/Resolver -
7/30/2019 abs disc break
14/35
A microcontrolleror stepper motor controller can be used to activate the drive transistors in theright order, and this ease of operation makes unipolar motors popular with hobbyists; they areprobably the cheapest way to get precise angular movements.
(For the experimenter, one way to distinguish common wire from a coil-end wire is by
measuring the resistance. Resistance between common wire and coil-end wire is always half ofwhat it is between coil-end and coil-end wires. This is due to the fact that there is actually twicethe length of coil between the ends and only half from center (common wire) to the end.)
Unipolar stepper motors with six or eight wires may be driven using bipolar drivers by leavingthe phase commons disconnected, and driving the two windings of each phase together. It is alsopossible to use a bipolar driver to drive only one winding of each phase, leaving half of thewindings unused.
Bipolar motor
Bipolar motors have logically a single winding per phase. The current in a winding needs to bereversed in order to reverse a magnetic pole, so the driving circuit must be more complicated,typically with an H-bridge arrangement. There are two leads per phase, none are common.
Static stictional effects using an H-bridge have been observed with certain drive topologies. SeeDuBord phenomenon.
Because windings are better utilised, they are more powerful than a unipolar motor of the sameweight.
8-lead stepper
An 8 lead stepper is wound like a unipolar stepper, but the leads are not joined to commoninternally to the motor. This kind of motor can be wired in several configurations:
Unipolar. Bipolar with series windings. This gives higher inductance but lower current per winding. Bipolar with parallel windings. This requires higher current but can perform better as the
winding inductance is reduced. Bipolar with a single winding per phase. This method will run the motor on only half the
available windings, which will reduce the available low speed torque but require lesscurrent.
Higher-phase count stepper motors
Multi-phase stepper motors with many phases tend to have much lower levels of vibration,although the cost of manufacture is higher too.
http://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/H-bridgehttp://en.wikipedia.org/w/index.php?title=DuBord&action=edit&redlink=1http://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/H-bridgehttp://en.wikipedia.org/w/index.php?title=DuBord&action=edit&redlink=1 -
7/30/2019 abs disc break
15/35
Stepper motor drive circuits
Stepper motor performance is strongly dependent on the drive circuit. Torque curves may beextended to greater speeds if the stator poles can be reversed more quickly, the limiting factor
being the winding inductance. To overcome the inductance and switch the windings quickly, onemust increase the drive voltage. This leads further to the necessity of limiting the current thatthese high voltages may otherwise induce.
L/R drive circuits
L/R drive circuits are also referred to as constant voltage drives because a constant positive ornegative voltage is applied to each winding to set the step positions. However, it is windingcurrent, not voltage that applies torque to the stepper motor shaft. The current I in each windingis related to the applied voltage V by the winding inductance L and the winding resistance R.The resistance R determines the maximum current according toOhm's law I=V/R. The
inductance L determines the maximum rate of change of the current in the winding according tothe formula for an InductordI/dt = V/L. Thus when controlled by an L/R drive, the maximumspeed of a stepper motor is limited by its inductance since at some speed, the voltage V will bechanging faster than the current I can keep up.
With an L/R drive it is possible to control a low voltage resistive motor with a higher voltagedrive simply by adding an external resistor in series with each winding. This will waste power inthe resistors, and generate heat. It is therefore considered a low performing option, albeit simpleand cheap.
Chopper drive circuits
Chopper drive circuits are also referred to as constant current drives because they generate asomewhat constant current in each winding rather than applying a constant voltage. On each newstep, a very high voltage is applied to the winding initially. This causes the current in thewinding to rise quickly since dI/dt = V/L where V is very large. The current in each winding ismonitored by the controller, usually by measuring the voltage across a small sense resistor inseries with each winding. When the current exceeds a specified current limit, the voltage isturned off or "chopped", typically using power transistors. When the winding current dropsbelow the specified limit, the voltage is turned on again. In this way, the current is held relativelyconstant for a particular step position. This requires additional electronics to sense windingcurrents, and control the switching, but it allows stepper motors to be driven with higher torque
at higher speeds than L/R drives. Integrated electronics for this purpose are widely available.chopper converts dc to variable dc.
Phase current waveforms
A stepper motor is a polyphase AC synchronous motor(see Theory below), and it is ideallydriven by sinusoidal current. A full step waveform is a gross approximation of a sinusoid, and is
http://en.wikipedia.org/wiki/Ohm's_lawhttp://en.wikipedia.org/wiki/Ohm's_lawhttp://en.wikipedia.org/wiki/Inductorhttp://en.wikipedia.org/wiki/Electric_motor#Three-phase_AC_synchronous_motorshttp://en.wikipedia.org/wiki/Ohm's_lawhttp://en.wikipedia.org/wiki/Inductorhttp://en.wikipedia.org/wiki/Electric_motor#Three-phase_AC_synchronous_motors -
7/30/2019 abs disc break
16/35
the reason why the motor exhibits so much vibration. Various drive techniques have beendeveloped to better approximate a sinusoidal drive waveform: these are half stepping andmicrostepping.
Full step drive (two phases on)
This is the usual method for full step driving the motor. Both phases are always on. The motorwill have full rated torque.
Wave drive
In this drive method only a single phase is activated at a time. It has the same number of steps asthe full step drive, but the motor will have significantly less than rated torque. It is rarely used.
Half stepping
When half stepping, the drive alternates between two phases on and a single phase on. Thisincreases the angular resolution, but the motor also has less torque at the half step position(where only a single phase is on). This may be mitigated by increasing the current in the activewinding to compensate. The advantage of half stepping is that the drive electronics need notchange to support it.
Microstepping
What is commonly referred to as microstepping is actual "sine cosine microstepping" in whichthe winding current approximates a sinusoidal AC waveform. Sine cosine microstepping is themost common form, but other waveforms are used[1]. Regardless of the waveform used, as the
microsteps become smaller, motor operation becomes more smooth. However, the purpose ofmicrostepping is not usually to achieve smoothness of motion, but to achieve higher positionresolution. A microstep driver may split a full step into as many as 256 microsteps. A typicalmotor may have 200 steps per revolution. Using such a motor with a 256 microstep controller(also referred to as a "divide by 256" controller) results in an angular resolution of 360/200/256= 0.00703125 or 51200 discrete positions per revolution. However, it should be noted that suchfine resolution is rarely achievable in practice, regardless of the controller, due to mechanicalstiction and other sources of error between the specified and actual positions.
Step size repeatability is an important step motor feature and a fundamental reason for their usein positioning. Microstepping can affect the step size repeatability of the motor. Example: many
modern hybrid step motors are rated such that the travel of every Full step (example 1.8 Degreesper Full step or 200 Full steps per revolution) will be within 3% or 5% of the travel of everyother Full step; as long as the motor is operated with in its specified operating ranges. Severalmanufacturers show that their motors can easily maintain the 3% or 5% equality of step travelsize as step size is reduced from Full stepping down to 1/10th stepping. Then, as themicrostepping divisor number grows, step size repeatability degrades. At large step sizereductions it is possible to issue many microstep commands before any motion occurs at all andthen the motion can be a "jump" to a new position.
http://www.zaber.com/wiki/Tutorials/Microsteppinghttp://www.zaber.com/wiki/Tutorials/Microsteppinghttp://en.wikipedia.org/wiki/Stictionhttp://www.zaber.com/wiki/Tutorials/Microsteppinghttp://en.wikipedia.org/wiki/Stiction -
7/30/2019 abs disc break
17/35
Theory
A step motor can be viewed as a synchronous AC motor with the number of poles (on both rotorand stator) increased, taking care that they have no common denominator. Additionally, soft
magnetic material with many teeth on the rotor and stator cheaply multiplies the number of poles(reluctance motor). Modern steppers are of hybrid design, having both permanent magnets andsoft iron cores.
To achieve full rated torque, the coils in a stepper motor must reach their full ratedcurrent duringeach step. Winding inductance and reverse EMF generated by a moving rotor tend to resistchanges in drive current, so that as the motor speeds up, less and less time is spent at full current-- thus reducing motor torque. As speeds further increase, the current will not reach the ratedvalue, and eventually the motor will cease to produce torque.
Pull-in torque
This is the measure of the torque produced by a stepper motor when it is operated without anacceleration state. At low speeds the stepper motor can synchronise itself with an applied stepfrequency, and this Pull-In torque must overcome friction and inertia.
Pull-out torque
The stepper motor Pull-Out torque is measured by accelerating the motor to the desired speedand then increasing the torque loading until the motor stalls or "pulls Out of synchronism" withthe step frequency. This measurement is taken across a wide range of speeds and the results areused to generate the stepper motors dynamic performance curve. As noted below this curve is
affected by drive voltage, drive current and current switching techniques. It is normallyrecommended to use a safety factor of between 50% and 100% when comparing your desiredtorque output to the published "pull-Out" torque performance curve of a step motor.
Detent torque
Synchronous electric motors using permanent magnets have a remnant position holding torque(called detent torque, and sometimes included in the specifications) when not driven electrically.Soft iron reluctance cores do not exhibit this behavior.
Stepper motor ratings and specifications
Stepper motors nameplates typically give only the winding current and occasionally the voltageand winding resistance. The ratedvoltage will produce the rated winding current at DC: but thisis mostly a meaningless rating, as all modern drivers are current limiting and the drive voltagesgreatly exceed the motor rated voltage.
http://en.wikipedia.org/wiki/Current_(electricity)http://en.wikipedia.org/wiki/Current_(electricity)http://en.wikipedia.org/wiki/Voltagehttp://en.wikipedia.org/wiki/Voltagehttp://en.wikipedia.org/wiki/Current_(electricity)http://en.wikipedia.org/wiki/Voltage -
7/30/2019 abs disc break
18/35
A stepper's low speed torque will vary directly with current. How quickly the torque falls off atfaster speeds depends on the winding inductance and the drive circuitry it is attached to,especially the driving voltage.
Steppers should be sized according to published torque curve, which is specified by the
manufacturer at particular drive voltages and/or using their own drive circuitry. It is notguaranteed that you will achieve the same performance given different drive circuitry, so the pairshould be chosen with great care.
Applications
Computer-controlled stepper motors are one of the most versatile forms ofpositioning systems.They are typically digitally controlled as part of an open loop system, and are simpler and morerugged than closed loopservo systems.
Industrial applications are in high speed pick and place equipment and multi-axis machine CNCmachines often directly driving lead screws orballscrews. In the field of lasers and optics theyare frequently used in precision positioning equipment such as linear actuators,linear stages,rotation stages, goniometers, and mirror mounts. Other uses are in packaging machinery, andpositioning of valve pilot stages for fluid control systems.
Commercially, stepper motors are used infloppy disk drives,flatbed scanners, computer printers,plotters and many more devices.
http://en.wikipedia.org/wiki/Positioning_systemhttp://en.wikipedia.org/wiki/Positioning_systemhttp://en.wikipedia.org/wiki/Open-loop_controllerhttp://en.wikipedia.org/wiki/Closed_loophttp://en.wikipedia.org/wiki/Servomechanismhttp://en.wikipedia.org/wiki/CNChttp://en.wikipedia.org/wiki/Lead_screwhttp://en.wikipedia.org/wiki/Ballscrewhttp://en.wikipedia.org/wiki/Linear_actuatorhttp://en.wikipedia.org/wiki/Linear_stagehttp://en.wikipedia.org/wiki/Linear_stagehttp://en.wikipedia.org/wiki/Linear_stagehttp://en.wikipedia.org/wiki/Rotation_stagehttp://en.wikipedia.org/wiki/Goniometer_(positioning)http://en.wikipedia.org/wiki/Mirror_mounthttp://en.wikipedia.org/wiki/Mirror_mounthttp://en.wikipedia.org/wiki/Floppy_diskhttp://en.wikipedia.org/wiki/Floppy_diskhttp://en.wikipedia.org/wiki/Floppy_diskhttp://en.wikipedia.org/wiki/Image_scannerhttp://en.wikipedia.org/wiki/Computer_printerhttp://en.wikipedia.org/wiki/Plotterhttp://en.wikipedia.org/wiki/Positioning_systemhttp://en.wikipedia.org/wiki/Open-loop_controllerhttp://en.wikipedia.org/wiki/Closed_loophttp://en.wikipedia.org/wiki/Servomechanismhttp://en.wikipedia.org/wiki/CNChttp://en.wikipedia.org/wiki/Lead_screwhttp://en.wikipedia.org/wiki/Ballscrewhttp://en.wikipedia.org/wiki/Linear_actuatorhttp://en.wikipedia.org/wiki/Linear_stagehttp://en.wikipedia.org/wiki/Rotation_stagehttp://en.wikipedia.org/wiki/Goniometer_(positioning)http://en.wikipedia.org/wiki/Mirror_mounthttp://en.wikipedia.org/wiki/Floppy_diskhttp://en.wikipedia.org/wiki/Image_scannerhttp://en.wikipedia.org/wiki/Computer_printerhttp://en.wikipedia.org/wiki/Plotter -
7/30/2019 abs disc break
19/35
R1
PC817
PC817
R1
4.7k
+5V
+9V
+9V
4.7k
-9V
-9V
1k
NPN
NPN PNP
PNP
1k
Ic555
37
4
8 1
+
470
7805
-
-
7/30/2019 abs disc break
20/35
AUTO
BRAKING
SYSTEM .
-
7/30/2019 abs disc break
21/35
In this project e show the concept f auto braking system. In this system we use one
sensor base technology. When vehicle move on the road and in the case of sudden
braking sensor sense the obstruction and immediate offer a braking system.
We attach this ABS system with any type of braking system.either hydrolic system
or induction braking. In this concept we use one photosensor with infra red light.
Infra red light transmit the signal in the air and if there is any obstruction then this
light is reflected from the object to the photosensor and further circuit is on
automatically.
-
7/30/2019 abs disc break
22/35
in the transmitter components we use infra red led as a transmitter and photodiode
as a receiver. This photodiode is connected to the ic 555. ic 555 is a 8 pin
monostable timer ic. Photodiode is connected to the pin no 2 directlly. When pin
no 2 become more negative then ic 555 provide a output to the pin no 3. Pin no 4
and 8 is connected to the positive supply. For this purpose we use 5 volt regulated
power supply for the ic. For the 5 volt regulated power supply we use ic 7805
regulator to provide a 5 volt regulation. Output of the ic 555 is connected to the H
bridge circuit through 2 optocoupler components. Optocoupler is 4 pin ic with 2
pin on either side. In this optocoupler there is one input led and one photodiode in
the other side. Optocoupler provide a isolation between the input and output circuit
through the optical isolation circuit.
Dc motor is control by the h bridge circuit. H bridge is combination of four
transsitor circuit. In the H bridge two transistors are npn and two transistors are
pnp transistor. With the help of this four transistor we control the direction of the
dc motor automatically.
-
7/30/2019 abs disc break
23/35
A is in essence nothing more than a normal bipolar transistor that is
encased in a transparent case so that light can reach the Base-Collector diode. The
phototransistor works like a photodiode, but with a much higher sensitivity for light,
because the electrons that tunnel through the Base-Collector diode are amplified by the
transistor function.
Phototransistors are specially designed transistors with the base region exposed. These
transistors are light sensitive, especially when infrared source of light is used. They
have only two leads (collector and emitter). When there is no light the phototransistor
is closed and does not allow a collector-emitter current to go through. The
phototransistor opens only with the presence of sufficient light
An opto electronic device that conducts current when exposed to light is the
PHOTOTRANSISTOR. A phototransistor, however, is much more sensitive to light and
produces more output current for a given light intensity that does a photodiode. Figure
3-32 shows one type of phototransistor, which is made by placing a photodiode in the
base circuit of an NPN transistor. Light falling on the photodiode changes the base
-
7/30/2019 abs disc break
24/35
current of the transistor, causing the collector current to be amplified. Phototransistors
may also be of the PNP type, with the photodiode placed in the base-collector circuit.
Figure 3-33 illustrates the
schematic symbols for the
various types of phototransistors.
Phototransistors may be of the two-terminal type, in which the light intensity on the
photodiode alone determines the amount of conduction. They may also be of the three-
terminal type, which have an added base lead that allows an electrical bias to be
applied to the base. The bias allows an optimum transistor conduction level, and thus
compensates for ambient (normal room) light intensity.
Figure 3-33. - 2-terminal and 3-terminal phototransistors.
(IR) radiation is electromagnetic radiation of a wavelength longer than visible
light, but shorter than microwave radiation. The name means "below red" (from the
-
7/30/2019 abs disc break
25/35
Latin infra, "below"), red being the color of visible light of longest wavelength. Infrared
radiation has wavelengths between 700 nm and 1 mm.
IR is often subdivided into near-IR (NIR, 0.7-5 m in wavelength), mid-IR (MIR (also
intermediate-IR (IIR)), 5 - 30 m) and far-IR (FIR, 30 - 1000 m). However, these
terms are not precise, and are used differently in the various study. Infrared radiation is
often linked to heat, since objects at room temperature or above will emit radiation
mostly concentrated in the mid-infrared band
Infrared is used in night-vision equipment, when there is insufficient visible light to see
an object. The radiation is detected and turned into an image on a screen, hotter
objects showing up brighter, enabling the police and military to chase targets.
Smoke is more transparent to infrared than to visible light, so fire fighters apply infrared
imaging equipment when working in smoke-filled areas.
A more common use of IR is in television remote controls. In this case it is used in preference toradio waves because it does not interfere with the television signal. IR data transmission is alsoemployed in short-range communication among computer peripherals and personal digitalassistants. These devices usually conform to standards published by IrDA, the Infrared DataAssociation. Remote controls and IrDA devices use infrared light-emitting diodes (LEDs) toemit infrared radiation which is focused by a plastic lens into a narrow beam. The beam is
modulated, i.e. switched on and off, to encode the data. The receiver uses a silicon photodiode toconvert the infrared radiation to an electric current. It responds only to the rapidly pulsing signalcreated by the transmitter, and filters out slowly changing infrared radiation from sunlight,people and other warm objects.
The light used in fiber optic communication is typically infrared.
-
7/30/2019 abs disc break
26/35
A functions as the electronic version of a one-way valve. By restricting the
direction of movement of charge carriers, it allows an electric current to flow in one
direction, but blocks it in the opposite direction.
A diode's current-voltage, or I-V, characteristic can be approximated by two regions of
operation. Below a certain difference in potential between the two leads, the diode can
be thought of as an open (non-conductive) circuit. As the potential difference is
increased, at some stage the diode will become conductive and allow current to flow, at
which point it can be thought of as a connection with zero (or at least very low)
resistance
A is a semiconductor device that emits incoherent
monochromatic light when electrically biased in the forward direction. This effect is a
form of electroluminescence. The color depends on the semiconducting material used,
and can be near-ultraviolet, visible or infrared. Nick Holonyak Jr. (1928 - ) developed
the first practical visible-spectrum LED in 1962.
-
7/30/2019 abs disc break
27/35
Light-emitting diodes
(various)
-
7/30/2019 abs disc break
28/35
A LED is a special type of semiconductor diode. Like a normal diode, it consists of a chip
of semiconducting material impregnated, or doped, with impurities to create a structure
called a pn junction. Charge-carriers (electrons and holes) are created by an electric
current passing through the junction, and release energy in the form of photons as they
recombine. The wavelength of the light, and therefore its colour, depends on the
bandgap energy of the materials forming the pn junction. A normal diode, typically
made of silicon or germanium, emits invisible far-infrared light, but the materials used
for a LED have bandgap energies corresponding to near-infrared, visible or near-
ultraviolet light.
Unlike incandescent bulbs, which can operate with either AC or DC, LEDs require a DC
supply of the correct polarity. When the voltage across the pn junction is in the correct
direction, a significant current flows and the device is said to be forward biased. The
-
7/30/2019 abs disc break
29/35
voltage across the LED in this case is fixed for a given LED and is proportional to the
energy of the emitted photons. If the voltage is of the wrong polarity, the device is said
to be reverse biased, very little current flows, and no light is emitted.
Conventional LEDs are made of inorganic minerals such as:
aluminium gallium arsenide (AlGaAs) - red and infrared
gallium arsenide/phosphide (GaAsP) - red, orange and yellow
gallium nitride (GaN) - green
gallium phosphide (GaP) - green
zinc selenide (ZnSe) - blue
indium gallium nitride (InGaN) - blue
silicon carbide (SiC) - blue
diamond (C) - ultraviolet
silicon (Si) - under development
LED development began with infrared and red devices, and technological advances
have made possible the production of devices with ever shorter wavelengths.
The semiconducting chip is encased in a solid plastic lens, which is much tougher than
the glass envelope of a traditional light bulb or tube. The plastic may be coloured, but
this is only for cosmetic reasons and does not affect the colour of the light emitted.
.
-
7/30/2019 abs disc break
30/35
Phototransistors are solid-state light detectors that possess internal gain. This makes
them much more sensitive than photodiodes of comparably sized area. These devices
can be used to provide either an analog or digital output signal. This family of detectors
offers the following general characteristics and features:
Low cost visible and near-IR photodetection
Available with gains from 100 to over 100,000
Moderately fast response times
Available in a wide range of packages including epoxy coated, transfer molded,
cast, hermetic packages and in chip form
Usable with almost any visible or near infrared light source such as LEDs, neon,
fluorescent, incandescent bulbs, laser, flame sources, sunlight, etc....
Same general electrical characteristics as familiar signal transistors (except that
incident light replaces base drive current)
Can be specially selected to meet the requirements of your particular application
-
7/30/2019 abs disc break
31/35
IRED's are solid state light sources which emit light in the near-IR part of the spectrum.
Because they emit at wavelengths which provide a close match to the peak spectral
response of silicon photodetectors both GaAs and GaAlAs LEDs are often used with
phototransistors and photodarlingtons. Key characteristics and features of these light
sources include:
Long operating lifetimes
Low power consumption, compatible with solid state electronics
Narrow band of emitted wavelengths
Minimal generation of heat
Available in a wide range of packages including epoxy coated, transfer molded,
cast and hermetic packages
Low cost
Can be specially selected to meet the requirements of your particular application
Applications
Phototransistors can be used as ambient light detectors. When used with a controllable
light source, typically and LED, they are often employed as the detector element for
optoisolators and transmissive or reflective optical switches. Typical configurations
include:
-
7/30/2019 abs disc break
32/35
The optoisolator is similar to a transformer in
that the output is electrically isolated from the
input.
An object is detected when it enters the gap
of the optical switch and blocks the light path
between the emitter and detector.
The retrosensor detects the presence of an
object by generating light and then looking
for its reflectance off of the object to be
sensed.
-
7/30/2019 abs disc break
33/35
track zero detector - floppy drive
margin controls - printers
read finger position - touch screen
detect holes - computer card
monitor paper position - copiers
LED light source - light pens
security systems
safety shields
encoders - measure speed and
direction
photoelectric controls
coin counters
position sensors - joysticks
remote controllers - toys, appliances,
audio/visual equipment
games - laser tag
provide electrical isolation between patient
and equipment
monitor intravenous injection rates
Basic of the ic 555 as a monostable timer.
-
7/30/2019 abs disc break
34/35
The 555 timer IC was first introduced around 1971 by the Signetics Corporation
as the SE555/NE555 and was called "The IC Time Machine" and was also the
very first and only commercial timer ic available. It provided circuit designers and
hobby tinkerers with a relatively cheap, stable, and user-friendly integrated circuit
for both monostable and astable applications. Since this device was first made
commercially available, a myrad of novel and unique circuits have been developed
and presented in several trade, professional, and hobby publications. The past ten
years some manufacturers stopped making these timers because of competition or
other reasons. Yet other companies, likeNTE (a subdivision of Philips) picked up
where some left off.
http://www.nteinc.com/http://www.nteinc.com/ -
7/30/2019 abs disc break
35/35