
A7_278
7
13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278 1 Isotropic Design of a 2 dof Parallel Kinematic Machine with a Translational Workpiece Table H. A. Moreno * J. A. Pamanes † Technical University of Madrid Autonomous University of Coahuila Madrid, Spain Torreon, Mexico Abstract—Parallel Kinematic Machines (PKMs) usually have the disadvantage of a reduced workspace. This problem can be solved by adding a moving table that relocates the workpiece for the PKM. In this paper we present the isotropic design of a 2 degrees of freedom PKM that works in cooperation with a moving table. For the analysis we used the condition number of the Jacobian Matrix of the whole kinematic chain (PKM- table). This work reveals the benefits of using a performance index, which considers the kinematics of both components together and not separately. Keywords: Kinematic redundancy, Isotropic design, Condition number. I. Introduction Although PKMs have interesting features for machining applications, in many cases they do not have sufficient workspace for machining large workpieces. This handicap, however, can be overcame by incorporating a secondary cooperative manipulator to aid the main one (the PKM) to achieve the task. The secondary manipulator should continuously relocate the work-piece to the main one in such a way that the kinematic performance of the chain is enhanced. In this paper, the isotropic design of a system with the previously cited characteristics is presented. The strategy in which a positional device is incorporated to aid the main manipulator has been applied in previous works. In one paper [1] the main manipulator was redundant, and the secondary was non- redundant. Both manipulators cooperate to achieve a welding task: the main one (right hand) moves the welding torch and the positioner (left hand) continuously relocates the work-pieces. In this paper, we present the isotropic design of a 2- PRR type PKM that works in cooperation with a translational table, see Figure 1. Fig. 1. 2 dof PKM and translational table The PKM presented here is termed 2 dof Orthoglide, [2][3]. The 2 dof Orthoglide can be used for machining applications such as milling. On the other hand, the translational table moves the workpiece in such a way that the Orthoglide’s end effector is enabled to reach task points that could not be reached otherwise. The translational table moves only in one direction, even though the workspace is significantly increased, as it will be demonstrated later. In this paper we analyze the benefits of using a kinematic performance index obtained from coupled manipulator kinematics. In consequence, the optimal configurations from the point of view of the condition number are obtained regarding the Jacobian matrix of the whole kinematic chain. We consider three optimal configurations and analyze errors corresponding to each, in order to numerically Workpiece Translational table 2 dof PKM End Effector Actuated Prismatic Joint * [email protected] † [email protected]
-
Upload
adan25tula -
Category
Documents
-
view
212 -
download
0
description
journal
Transcript of A7_278

13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278
1
Isotropic Design of a 2 dof Parallel Kinematic Machine with a Translational
Workpiece Table
H. A. Moreno
* J. A. Pamanes
†
Technical University of Madrid Autonomous University of Coahuila
Madrid, Spain Torreon, Mexico
Abstract—Parallel Kinematic Machines (PKMs)
usually have the disadvantage of a reduced workspace.
This problem can be solved by adding a moving table
that relocates the workpiece for the PKM. In this paper
we present the isotropic design of a 2 degrees of freedom
PKM that works in cooperation with a moving table. For
the analysis we used the condition number of the
Jacobian Matrix of the whole kinematic chain (PKM-
table). This work reveals the benefits of using a
performance index, which considers the kinematics of
both components together and not separately. Keywords: Kinematic redundancy, Isotropic design, Condition
number.
I. Introduction
Although PKMs have interesting features for
machining applications, in many cases they do not have
sufficient workspace for machining large workpieces.
This handicap, however, can be overcame by
incorporating a secondary cooperative manipulator to aid
the main one (the PKM) to achieve the task. The
secondary manipulator should continuously relocate the
work-piece to the main one in such a way that the
kinematic performance of the chain is enhanced. In this
paper, the isotropic design of a system with the
previously cited characteristics is presented.
The strategy in which a positional device is
incorporated to aid the main manipulator has been
applied in previous works. In one paper [1] the main
manipulator was redundant, and the secondary was non-
redundant. Both manipulators cooperate to achieve a
welding task: the main one (right hand) moves the
welding torch and the positioner (left hand) continuously
relocates the work-pieces.
In this paper, we present the isotropic design of a 2-
PRR type PKM that works in cooperation with a
translational table, see Figure 1.
Fig. 1. 2 dof PKM and translational table
The PKM presented here is termed 2 dof Orthoglide,
[2][3]. The 2 dof Orthoglide can be used for machining
applications such as milling.
On the other hand, the translational table moves the
workpiece in such a way that the Orthoglide’s end
effector is enabled to reach task points that could not be
reached otherwise. The translational table moves only in
one direction, even though the workspace is significantly
increased, as it will be demonstrated later.
In this paper we analyze the benefits of using a
kinematic performance index obtained from coupled
manipulator kinematics. In consequence, the optimal
configurations from the point of view of the condition
number are obtained regarding the Jacobian matrix of the
whole kinematic chain.
We consider three optimal configurations and analyze
errors corresponding to each, in order to numerically
Workpiece
Translational table
2 dof PKM
End Effector
Actuated
Prismatic Joint

13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278
2
2ρ
0
cr
0y
0x
A
B
C
1ρ
1θ
1y
1x
3ρ
0
cr
0y
0x
2ρ
1ρ
revealing and contrasting the PKM’s performance during
a task.
II. Preliminaries
The kinematic scheme of the 2 dof Orthoglide is
shown in Figure 2. As can be observed, the PKM is
composed of two actuated sliding blocks which are
coupled to the fixed frame by prismatic joints. On the
other hand, the blocks are connected to the links AC and
BC by the revolute joints A and B, respectively. Lastly,
such links are connected by the revolute joint C. All the
revolute joints are passives. The axes of the prismatic
joints are orthogonal.
Fig. 2. Kinematic scheme of the 2 dof Orthoglide.
Figure 3 shows a kinematic scheme of the Orthoglide
and the cooperative table with translational motion. We
name this system (Orthoglide and table) assisted PKM.
The direction of motion of the table is defined by the
angle 1θ . On the other hand,
1γ is half of the angle
between the sliding blocks movement axes. By
definition, for the Orthoglide we have 1 45γ = ° .
Fig. 3. Kinematic scheme of the 2 dof Orthoglide with the cooperative
table.
In the following, we consider lengths of bars AC and
BC as being 1mL = ; besides, we maintain the angle
1 45θ = ° , since the workspace reaches its maximum at
this value.
It can be observed in Figure 4 that the PKM’s
workspace oW is increased by incorporating a
cooperative table. If tl was the length of the largest
transversal line that the PKM is able to draw on the table,
then the assisted PKM’s workspace is given by :
3op o tW W l ρ= + ∆ with3 3max 3minρ ρ ρ∆ = − .
(a) (b)
Figure 4. Workspace of the 2 dof Orthoglide. (a) Without cooperative
table, (b) Assisted PKM
A. Kinematics of the assisted PKM
The joint and operational velocity vectors, ρ and t,
respectively, of a parallel manipulator are related as
follows:
At = Bρ& (1)
In (1), A and B are, respectively, the parallel and serial
Jacobian matrices, [4]. The entries of these matrices
depend on both the design variables and manipulator
pose.
For the Orthoglide without table, the joint velocity
vector is given by [ ]1 2
Tρ ρ=ρ& & & and the operational
velocity vector is [ ]Tcx cyr r=t & & . The scalars cxr& and
cyr&
are the orthogonal components of the position vector 0rc
(corresponding to point C) referred to a frame x0-y
0, (Fig.
1.) For the Orthoglide we have:
0
4
0
5
ˆ
ˆ
T
o T
=
rA
r (2)
1 4
2 5
ˆ ˆ0
ˆ ˆ 0
T
o T
=
r rB
r r (3)
1γ
1γ
2γ
3γ
4r̂
1̂r
2r̂
5̂r
3̂r
tl
m1.50 2 ≤≤ ρ
m1.50 3 ≤≤ ρ
m 11- 3 ≤≤ ρ

13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278
3
For the assisted PKM (Figure 3), the joint velocity
vector is given by [ ]1 2 3
Tρ ρ ρ=ρ& & & & and the operational
velocity vector is defined in the same way that the last
case. The corresponding Jacobian matrices are:
0
4
0
5
ˆ
ˆ
T
op T
=
rA
r (4)
1 4 3 4
2 5 3 5
ˆ ˆ ˆ ˆ0
ˆ ˆ ˆ ˆ0
T T
op T T
=
r r r rB
r r r r (5)
The symbol ^ on a vectorial term of these equations
designates unit vector. In matrices (4) and (5) the unit
vectors correspond to the position vectors associated with
PKM’s links, as shown in Figure 2. The velocity of point
C (end-effector) of the Orthoglide relative to the table is
obtained from Equation 1 as:
=t Jρ& (6)
where 1−=J A B .
On the other hand, since the assisted PKM can be
considered as a redundant one, the general solution of the
inverse kinematic problem is written as follows:
( )+ += + −ρ J t I J J z& (7)
The term +J t is the least norm solution of the inverse
kinematic problem. The expression ( )+−I J J z , is the
homogenous solution, which represents the projection of
z on the null space of J .
B. Singular configurations
It can be shown that matrix oA and
opA are singular
when vectors 4r and 5r (i.e. links AC and BC) are
parallel; in this case the PKM is on a parallel singularity.
Figure 5(a) show a configuration which corresponds to a
parallel singularity. It is possible to observe that the PKM
can not support any force perpendicular to links AC and
BC; consequently point C could be moved even if the
actuators are blocked. This situation is obviously
undesirable.
On the other hand, in (3) it can be observed that matrix
oB is singular when vectors 1r and
4r , or 2r and
5r ,
become orthogonal. In this case the PKM is on a serial
singularity. In this situation, the PKM is not able to move
its end-effector.
Fig. 5. Parallel (a) and serial (b) singularities.
When matrix opB is rank-deficient the PKM cannot
control its end-effector. Figure 5(b) shows a serial
singularity at which the PKM is unable to move point C;
in this case the relative movement, between point C and
the table, only can be in parallel direction to the table axis
of motion.
Note that vector 3r does not have any influence over
matrix opA . On the other hand, even though some entries
of matrix opB depend on
3r , this vector cannot produce a
rank loss.
III. Kinematic Performance Index
There are several works on indexes that evaluate the
kinematic performance of serial manipulators, for
example, those introduced in [5],[6],[7]. However, the
extension of those indexes for their application in parallel
manipulators is not immediate because of the existence of
two Jacobian matrices, each of them with a different
function in the PKM kinematic model. Therefore, the
performance evaluation through an arbitrary index used
in serial manipulators could produce undesirable results
in parallels.
In this article, the condition number is used as a
performance index, since it can be efficiently applied to
both serial and parallel manipulators [6].
The condition number of the Jacobian matrix is an
interesting index for evaluating the PKM kinematic
performance. This index measures the uniformity of the
velocities and forces distribution that could develop end-
effector in all directions [8], this feature is a priority for
tasks such as machined processes [9, 10].
Besides, the condition number limits the error
propagation from the joint velocities to the end-effector
velocities. In consequence, it is necessary to maintain
that number in its lowest possible value for the purpose
of preserving an adequate precision level of the
manipulator’s movements. The condition number of a
matrix J is defined as
m
M
λλ
κ =(J) ( 8 )
A, B
C
C A
B
(a) (b)

13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278
4
where Mλ and
mλ are maximum and minimum
singular values of J, respectively. The minimum value
that could reach κ(J) is 1. When one configuration
reaches this ideal value, it is said that the configuration is
isotropic. On the other hand, κ(J) becomes infinite when
the PKM is in a singular configuration.
The condition number of the Othoglide κo= κ(Jo), is
calculated from the next Jacobian matrix:
1
o o o
−=J A B ( 9 )
On the other hand, the condition number of the assited
PKM κop= κ(Jop), is determined by the following
Jacobian matrix:
1
op op op
−=J A B (10)
The matrixes A and B from the equation (9) and (10)
are defined in equations (2) to (5).
IV. Isotropic Design and Configurations
Isotropic configurations are those whose condition
number is equal to the unit. In this kind of configuration,
the PKM is capable of displacing the end-effector in the
same extent in all directions. If a PKM is capable of
reaching an isotropic configuration, it is called isotropic.
Two degree of freedom planar manipulators are an
important type of robotic mechanism that can follow an
arbitrary planar curve. Because of their usefulness in
applications, these mechanisms have drawn the attention
of researches who have investigated their workspace and
design [2, 3, 13]. The robots taken into consideration
were not redundant in those works. In [14] an analysis
was developed to determine the isotropic design of a n-
axis planar serial manipulator, this manipulato was
intended for positioning the end-effector in the x-y plane.
In that work, Angeles pointed out that isotropic
conditions could be achieved in several ways. Because
the entries of the Jacobian matrices (4) and (5) are based
on five unit vectors, there are different ways to determine
an isotopic configuration.
The Jacobian matrices can be expressed in terms of
five angles that correspond to the unit vectors. For
simplicity and regarding the PKM structure, we choose
only three angles that characterize the design and position
of the assisted PKM. Those are 1γ ,
2γ , and 3γ , and
were previously shown in Fig 4. Those angles describe
the orientation of vectors 1r ,
2r , 4r and
5r with respect
the motion axis of the table.
Regarding the angles 1γ ,
2γ and 3γ , the Jacobian
matrices (4) and (5) become:
2 2
3 3
sin( ) cos( )
sin( ) cos( )op
γ γγ γ
− =
A (11)
1 2 2
1 3 3
0 cos( ) cos( )
cos( ) 0 cos( )op
γ γ γγ γ γ
− − = − −
B (12)
hence, the Jacobian matrixopJ is set in the following
way:
2 1 3 3 1 2
2 1 3 3 1 2 2 3
cos( )cos( ) cos( ) cos( ) 0
sin( ) cos( ) sin( ) cos( ) sin( )op d
γ γ γ γ γ γγ γ γ γ γ γ γ γ
− − − = − − − − +
J
(13)
where 2 31/ sin( )d γ γ= + .
If we let K be defined in the following way :
T
op op=K J J (14)
opJ becomes isotropic when [15 ] :
τ=K I (15)
the entries of K are given by
11 12
21 22
k k
k k
=
K
where: 2 2 2 2 2
11 3 1 2 2 1 3cos( ) cos( ) cos( ) cos( )k d γ γ γ γ γ γ = − + − 2 2 2 2 2 2
22 2 3 3 1 2 2 1 3sin( ) sin( ) cos( ) sin( ) cos( )k d γ γ γ γ γ γ γ γ = + + − + − 2 2 2
12 2 1 3 2 3 1 2 3cos( )cos( ) sin( ) cos( )cos( ) sin( )k d γ γ γ γ γ γ γ γ = − − −
12 21k k=
(16 a-d)
The isotropic conditions from (15) are
12 21 0k k= = and 11 22k k τ= = . It is easy to observe from
(16c), d that 12k and
21k become zero when 2 3γ γ= for
any value of 1γ . On the other hand, if we regard
2 3γ γ=
then the equality 11 22k k τ= = becomes :
2 2 2 2
2 2 1 2 22 cos( ) sin( ) cos( ) sin(2 )γ γ γ γ γ − − = (17)
resolving for 1γ :
2 21 2
tan(2 )sin(2 )= +acos
2
γ γγ γ
±
(18)

13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278
5
Fig. 6. Isotropic designs.
In Fig. 6 the values of 1γ and
2 3γ γ= which provide
the isotropic design are shown. Fig. 6 shows that there
are several isotropic designs and their corresponding
poses. It is very important to note that when 2 0ºγ = the
links AB and BC are parallel and the PKM assumes a
singular configuration of parallel type (Fig. 5a). Even
though the Jacobian matrix (13) remains isotropic when
2γ is close to zero, the PKM loses its ability to move in
the 0y direction. Therefore it is not advisable to choose
design variables when 2γ is close to zero.
In the following subsections we use the results derived
in preceding paragraphs, and obtain from (18) an
isotropic configuration for the Orthoglide (it means
1 45ºγ = ). Furthermore, we derive an isotropic design
where the motion axes of the actuated joints are
symmetrically situated. We compare its performance
regarding the velocity error in the isotropic configuration.
Case 1: Orthoglide Isotropic Configuration
The Orthoglide isotropic configuration is shown in
Fig. 6. In this configuration, the velocity cxr& is directly
proportional to the joint velocity2ρ& , therefore the
velocity errors in the 0x direction are only a product of
velocity errors in the actuator associated to2ρ& , but not of
two actuators at the same time. The same occurs in the
case of cyr& , whose velocity is given by
1ρ& .
On the other hand, the PKM has not only an isotropic
configuration, there are a set of isotropic configurations
that correspond to a continuum of workspace points
defined by a 45 ° straight line segment with respect to
the frame x0-y
0 [15]. When the PKM’s end-effector
reaches points over this line 1oκ = ; but, even though the
singular values that correspond to one point in the line
are equal among them, the magnitudes of those values
change at different points in the line.
When the Orthoglide, under one configuration such as
1oκ = , is required to work with a moving table, it is
observed that κop ≠ 1, therefore this assisted PKM
configuration is not isotropic. In this configuration, the
Jacobian matrix of the whole kinematic chain is given by:
(1)
0.7071 0.7071 0
0.7071 0.7071 1op
− = − − −
J , (19)
from which 1.4142opκ = is obtained.
Fig. 7. Orthoglide isotropic configuration
Case 2: Assisted PKM Isotropic Configuration
The minumum condition number that is obtained
inside the PKM’s workspace is 1opκ = . In Fig. 8, the
configuration corresponding to this value is shown. In
this configuration, the robot is Isotropic.
In the isotropic configuration the Jacobian is given by:
(2)
0.9127 0.9127 0
0.5771 0.5771 1op
− = − − −
J (20)
Fig. 8. Assisted PKM isotropic configuration.
Case 3: Isotropic design of the assisted PKM
In Fig. 9, the isotropic design of the PKM can be seen
in an isotropic configuration. In this case the Jacobian
matrix results in:
(3)
0.8660 0.8660 0
0.5 0.5 1op
− = − −
J (21)
In this case 1opκ = is obtained.
1γ
1γ (deg)
1γ
2 3γ γ= (deg)
Isotropic
continuuum
13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278
6
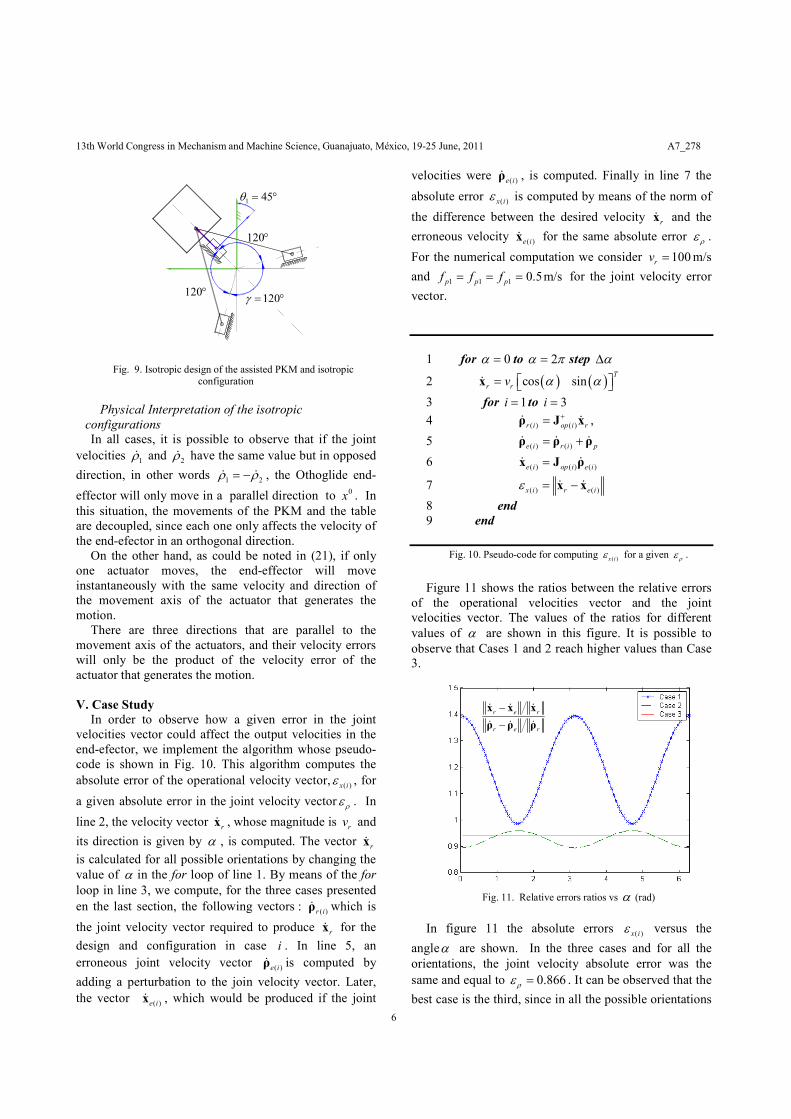
120γ = °
120°
120°
1 45θ = °
Fig. 9. Isotropic design of the assisted PKM and isotropic configuration
Physical Interpretation of the isotropic
configurations
In all cases, it is possible to observe that if the joint
velocities 1ρ& and
2ρ& have the same value but in opposed
direction, in other words 1 2ρ ρ= −& & , the Othoglide end-
effector will only move in a parallel direction to 0x . In
this situation, the movements of the PKM and the table
are decoupled, since each one only affects the velocity of
the end-efector in an orthogonal direction.
On the other hand, as could be noted in (21), if only
one actuator moves, the end-effector will move
instantaneously with the same velocity and direction of
the movement axis of the actuator that generates the
motion.
There are three directions that are parallel to the
movement axis of the actuators, and their velocity errors
will only be the product of the velocity error of the
actuator that generates the motion.
V. Case Study
In order to observe how a given error in the joint
velocities vector could affect the output velocities in the
end-efector, we implement the algorithm whose pseudo-
code is shown in Fig. 10. This algorithm computes the
absolute error of the operational velocity vector,( )x iε , for
a given absolute error in the joint velocity vector ρε . In
line 2, the velocity vector rx& , whose magnitude is
rv and
its direction is given by α , is computed. The vector rx&
is calculated for all possible orientations by changing the
value of α in the for loop of line 1. By means of the for
loop in line 3, we compute, for the three cases presented
en the last section, the following vectors : ( )r iρ& which is
the joint velocity vector required to produce rx& for the
design and configuration in case i . In line 5, an
erroneous joint velocity vector ( )e iρ& is computed by
adding a perturbation to the join velocity vector. Later,
the vector ( )e ix& , which would be produced if the joint
velocities were ( )e iρ& , is computed. Finally in line 7 the
absolute error ( )x iε is computed by means of the norm of
the difference between the desired velocity rx& and the
erroneous velocity ( )e ix& for the same absolute error ρε .
For the numerical computation we consider 100rv = m/s
and 1 1 1 0.5m/sp p pf f f= = = for the joint velocity error
vector.
1 for 0α = to 2α π= step α∆
2 ( ) ( )cos sinT
r rv α α= x&
3 for 1i = to 3i =
4 ( ) ( )r i op i r
+=ρ J x& & ,
5 ( ) ( )e i r i p= +ρ ρ ρ& & &
6 ( ) ( ) ( )e i op i e i=x J ρ&&
7 ( ) ( )x i r e iε = −x x& &
8 end
9 end
Fig. 10. Pseudo-code for computing ( )x iε for a given ρε .
Figure 11 shows the ratios between the relative errors
of the operational velocities vector and the joint
velocities vector. The values of the ratios for different
values of α are shown in this figure. It is possible to
observe that Cases 1 and 2 reach higher values than Case
3.
Fig. 11. Relative errors ratios vs α (rad)
In figure 11 the absolute errors ( )x iε versus the
angleα are shown. In the three cases and for all the
orientations, the joint velocity absolute error was the
same and equal to 0.866ρε = . It can be observed that the
best case is the third, since in all the possible orientations
r e r
r e r
−
−
x x x
ρ ρ ρ
& & &
& & &

13th World Congress in Mechanism and Machine Science, Guanajuato, México, 19-25 June, 2011 A7_278
7
it always preserves the lowest value of absolute error
( )x iε . On the other hand, the best second case is case 2. It
is possible to observe that cases 2 and 3 are closer than
cases 2 and 1. In conclusion, it is possible to observe that
the third case was the least affected by the errors in the
joint velocity vector.
0 1 2 3 4 5 60.95
1
1.05
1.1
1.15
1.2
1.25
Case 1
Case 2
Case 3
Fig. 11. Absolute errors vs α (rad)
VI. Conclusions
In this paper we presented the isotropic design of a 2
dof PKM that works in cooperation with a translational
table. It was shown that the workspace is directly
proportional to the range of motion of the translational
table, and can be significantly amplified when the table is
added. For the kinematic analysis we used the condition
number of the Jacobian Matrix of the whole kinematic
chain. Three angles were used to characterize the design
and position of the assisted PKM in order to simplify the
analisys. A Jabobian matrix in function of these angles
was derived. By means of this analysis, we found the
geometric conditions to attain isotropic designs and
configurations. Three optimal designs were considered in
order to make a numerical study of the velocity errors
corresponding to each. In all cases, it is possible to
observe that if the PKM’s joint velocities 1ρ& and
2ρ&
have the same value but in opposed direction, in other
words 1 2ρ ρ= −& & , the PKM end-effector will only move
in a parallel direction to 0x . In this situation, the
motions of the PKM and the table are decoupled, since
each one only affects the velocity of the end-efector in an
orthogonal direction. A symmetric design was found, and
it was observed that if only one actuator moves, the end-
effector will move instantaneously with the same velocity
and direction of the movement axis of the actuator that
generates the motion. There are three directions that are
parallel to the movement axis of the actuators, and their
velocity errors will only be the product of the velocity
error of the actuator that generates the motion. It was
shown that the Orthoglide’s isotropic configuration is not
valid when it works in cooperation with a translational
table. This work revealed the benefits of using a
performance index, which considers the kinematics of
both components together and not separately. In this
paper we presented the isotropic design of a mechanical
system for a real aplication, the analsys provides
meaningful results at practical and conceptual levels.
References
[1] Hemmerle J.S., Prinz F.B, “Optimal Path Placement for
Kinematically Redundant Manipulators,” Proceedings of the 1991 IEEE International Conference of Robotics and Automation, pp.1234-1243.
[2] Majou F., Wenger P., Chablat D., “Design of 2-DOF Parallel
Mechanisms for Machining Applications,” Advances in Robot Kinematics: Theory and Applications; Kluwer Academic
Publishers. Edited by J. Lenarcic and F. Thomas; pp. 319-328,
2002. [3] Wenger P., Gosselin C., Chablat D. “A comparative study of
parallel kinematic architectures for machining applications,” 2nd
Workshop on Computational Kinematics, Seoul South Korea; 2001. [4] Gosselin C., Angeles J., “Singularity analysis of closed-loop
kinematic chains,” Proceedings of the 1990 IEEE International
Conference of Robotics and Automation. [5] Yoshikawa T., “Manipulability of Robotics Mechanisms,”
Robotics Research: The second International Symposium, pp.439-
446, 1984. [6] Angeles J., López-Cajún C., “Kinematic Isotropy and
Conditioning Index of Serial Robotic Manipulators,” Int. J.
Robotics Research; 11 (6), pp. 560-571 (1992). [7] Chiu, S. L., “Task compatibility of manipulators postures,” Int.
J. Robotics Research, 7 (5), 13-21, 1988.
[8] Salisbury J.K., Craig J. J., “Articulated hands: force and kinematic issues,” The Int. J. of Robotic Research, vol. 1(1), pp. 4-17, 1982.
[9] Chablat D., Wenger P., “Architecture Optimization of a 3-DOF
Parallel Mechanism for Machining Applications, the Orthoglide,” IEEE Transactions on Robotics and Automation, vol. 19(3), pp
403-410, juin 2003.
[10] Huang T., Whitehouse D., “Local dexterity, optimal architecture and optimal design of parallel machine tools,” Ann.
CIRP, vol. 47, no. 1, pp. 347–351, 1998.
[11] Zanganeh K. E., Angeles J., “Kinematic isotropy and the optimum design of parallel manipulators,” Int. J. Robot. Res., vol.
16, no. 2, pp. 185–197, 1997.
[12] Baron L., Bernier G., “The design of parallel manipulators of star topology under isotropic constraint,” Proc. DETC ASME,
Pittsburgh, PA, 2001. [13] Tian Huang, Meng Li, Zhanxian Li, Derek G. Chetwynd, and
David J. Whitehouse, “Optimal Kinematic Design of 2-DOF
Parallel Manipulators With Well-Shaped Workspace Bounded by a Specified Conditioning Index,” IEEE Transactions On Robotics
And Automation, Vol. 20, No. 3, June 2004 pp 538 543.
[14] Jorge Angeles, “The Design of Isotropic Manipulator Architectures in the presence of Redundancies,” The International
Journal of Robotics Research. Vol. 11. No. 3. June 1992. pp. 196-
201. [15] Angeles J., Fundamentals of robotic mechanical systems,
Springer-Verlag, New York. 3rd ed., 2007.


















