A U I WICLASSIFIED Eh~hEEE~h2 ITERATIVE SOL.UTION OF INDEFINITE SYMMETRIC SYSTEMS BY METHODS...
56
7 A A1 I 4 88 YALE A4IV NEW HAVEN CT DEPT OF COMPUTER SCIENCE F16 12/1 ITERATIVE SOL.UTION OF INDEFINITE SYMMETRIC SYSTEMS BY METHODS U-CTYC(U) U NL_ OCT 81 Y SAAO N00011-76-C-0277 WICLASSIFIED TR-212 N Eh~hEEE~h2
Transcript of A U I WICLASSIFIED Eh~hEEE~h2 ITERATIVE SOL.UTION OF INDEFINITE SYMMETRIC SYSTEMS BY METHODS...

7 A A1 I 4 88 YALE A4IV NEW HAVEN CT DEPT OF COMPUTER SCIENCE F16 12/1
ITERATIVE SOL.UTION OF INDEFINITE SYMMETRIC SYSTEMS BY METHODS U-CTYC(U)U NL_ OCT 81 Y SAAO N00011-76-C-0277
WICLASSIFIED TR-212 N
Eh~hEEE~h2

1 2.2
L4.0 12.01.8
11111 L25 j.4 1 .6
MICROCOPY RESOLUTION TEST CHART

I TI
YALE UNIVERIT
I, DPARTENT F CMPUTR SCENC820 04 "41

Z79RATIVE SOLUTION OF INDEFINITE 87NMB'IhCSYSUNS By NUMODS usnIs CWLUCSKAL 0
FOLYNWDIA q OVU TW0 DISJOINT XNMYALS
Y. SAAD
Technical Report # 212October 12, 1981
This work was supported in part by the U.S. Office of Naval Research undergrant N000014-76-C-0277 and in part by NSF Grant.
tiT~bui~S -
Abstract
It is shown in this paper that certain orthogonal polynomials over two
disjoint intervals can be particularly useful for solving large
symetric indefinite linear systems or for finding a few interior
eigenvalues of a large symtric matrix. There are several advantages
of the proposed approach over the techniques which are based upon the
polynomials having the least uniform norm in two intervals. While a
theoretical comparison will show that the norms of the minimal
polynomial of degree n in the least squares sense differs from the
minimax polynomial of the same degree by a factor not exceeding
422(n+l/ 0 the least squares polynomials are by far easier to compute
and to use thanks to their three term recurrence relation. A number
t of suggestions will be made for the problem of estimating the optimal
parameters and several numerical experiments will be reported.
...........o
?NTIS GRU&1DTIC TASUnanauun d
LD i,.tr _but 1. On ...Avajlgb*At+"y Codes
Dista ptciBI.i .... !i l::l - . ,.
iCOPY

2
This paper is concerned with the solution of large indefinite linear systems
A x f. The number of effective Iterative methods for treating such problems is
limited. An obvious possibility is to solve the normal equations Ax - A f by any
available method for solving positive definite systems but this is not recommended
in general as it increases the amount of work and above all squares the original
condition number. Perhaps the beat known contribution in the field was made by
Paige and Saunders who adapted the Conjugate Gradient method to indefinite
systems [8]. There have also been a few attempts towards the generalization of
the Chebyshev iteration algorithm (also called Stiefel Iteration) to the
indefinite case by Lebedev [6],Roloff [10] and de Boor and Rice [4]. These works
focus on the difficult problem of finding a polynomial of degree n such that
Pn(O)=1 and having least uniform norm in two intervals containing the elgenvalues
I of A but not the origin. Like in the positive definite case, such polynomials are
the best for making the residual norm small in a certain sense in the Richardson
iteration:
zn+1=Xn rn
where vn is the n root of the polynomial and r is the residual of z n There
are, however, some serious drawbacks of this approach one of the most important
being that the mini-nax polynomial is rather difficult to obtain numerically.
Moreover the above Richardson iteration is unstable in general,
At this point one might ask whether it is essential to use the minimax
polynomial. Perhaps the most attractive property of the Chebyshev polynomials is
its three term recurrence formula which enables one to generate, In the positive
definite case, a sequence of approzinmato solutions to the linear system which
satisfy a three term recurrence. As pointed out by do Door and Rice [4], it seems
•1 4 . x I '_..21L -, tZ ,,. , , ,
3
unfortunately impossible to exhibit a three term recurrence for the minimax
polynomials over two intervals.
Nevertheless a natural alternative considered in this paper is to construct a
sequence of polynomials satisfying pn(0)-1 and which minimize an L2 norm
associated with a certain weight function over the two intervals. Such polynomials
are easy to compute and can be obtained via a sequence of polynomials satisfying a
three term recurrence. Moreover it will be shown that their uniform norm in the
two intervals is comparable within a factor of 2(n+l) 1/2 with the norm of the
minimax polynomial if n is the degree of both polynomials. We will call
Generalized Chebyshev Iteration (GCI) the iterative method which at each step
yields a residual vector of the form rn=pn(A)r0 where Pn is the minimal
polynomial. There are several other applications of the minimal polynomial in
addition to the Generalized Chebyshev Iteration. First, a block version of the
alSorithm can be formulated. It is essentially a generalization of the block
Stiefel algoritbm described in [111 and is particularly suitable for parallel
computation. Secondly there are various ways of using the minimal polynomials for
computing eigenvectors associated with interior eigenvalues. For example one can
easily adapt the subspace iteration method (see [91) to interior eiSenvalues. A
few of the possible generalizations and extensions of the basic Generalized
Chebyshev Iteration will be briefly outlined but we will not attempt to describe
them in detail.
Section 2 describes polynomial iteration for solving linear systems. In
section 3 we will deal with the orthogonal polynomials over two intervals and will
introduce the minimal polynomial. Section 4 covers the application of the minimal
polynomials to the solution of indefinite systems while section 5 outlines their
application to the interior igenvalue problems. Zn section 6 a umber of
practical details, concerning in particular the estimation of the optimal
4
parameters, are given. Finally some numerical experiments are reported in section
7 and a tentative conclusion is drawn in the last section.
2. fljZam itLeation In IJAMU hAlMLJ
Consider the N x N linear system
A x f (2.1)
where A is a nonsingular symetric matrix. Let x0 be any initial guess of the
solution x and r0 the corresponding initial residual r0 - f - A z0 . Polynomial
iteration methods are methods that provide approximate solutions xn whose
residuals rn satisfy:
rn = Pn ( A ) r0 (2.2)
where Pn is a polynomial of degree n, often called the residual polynomial. We
only consider methods in which xn is given by
xn+1 ' xn + anUn (2.3)
where un , the direction of search, is a linear combination of the previous
residuals. In this case it can easily be shown by induction that the polynomial pn
satisfies the condition Pn(0) 1.
If r0 is written in the elaenbasis (ul 1 ,N of A as
N0 4 = 1 "1u
then obviously the Euclidean norm of rn is
N 2 12 (2
Ilrnl1 I I PUO) 4, 2 (2.4)i-1
where the X ' a are the eigenvalues of A.
ILL--

[S
Equation 2.4 suggests the general principle that if we want the residual norm
lin1l to be small, we must find a polynomial satisfying pn(O) = 1 which is small
in some set containing the eigenvalues of A. One way of choosing a residual
polynomial which is small in a set containing the spectrum is to take among the
polynomials satisfying pn (0) = 1 the one which has the least uniform norm in that
set. When the matrix A is positive definite its eigenvalues can be included in
one single interval [a,b] not containing the origin and the polynomial having
least uniform norm in [a,b] can easily be expressed in terms of the Chebyshev
polynomials. This is the essence of the Chebyshov semi iterative method [5].
When A is not positive definite, i.e. when it has both positive and negative
eigenvalues, then its spectrum can be included in two disjoint intervals [a,b],
[c,d] with b < 0 < c , and the polynomial having having least uniform norm in
[a,b] U [c,d] can no longer be easily expressed. Lebedev [6] considered this
problem and gave an explicit solution to it for the very particular case when the
two intervals [a,b] and [c,d] have the same length. Lebodev does not however give
any suggestion for the general case and de Boor and Rice (41 showed how to
practically obtain the polynomial of minimal uniform norm in two disjoint
intervals. There remains however several serious difficulties with the use of
these minimax polynomials which render the method unattractive and unreliable.
Firstly the computation of the minimax polynomial can be particularly difficult
and time consuming. Secondly once the minimax polynomial is available one must
perform the Richardson iteration:
SXi+ 1 = Ii + Ci ri (2.5)
where the v 'a are the inverses of the roots of the minimax polynomial. These
roots should therefore be computed before 2.5 is started but this can be done at a
negligible cost. The main disadvantage of 2.5. however, lies in its unstability.
This can easily be understood by deriving from 2.5 the equivalent equation for the
6
residual vectors
ri+liri -l A ri - (I - iA)ri
which shows that
ri+ (1 -i+ A)(I - -i A ) (I-co A) r0 (2.6)
Although the final residual rn should be small in exact arithmetic, the
intermediate residuals ri can be very large as is easily seen from 2.6 and this
may cause unstability in iteration 2.5. Reordering of the parameters T might be
used to achieve a better stability [1] although this does not seem to constitute
a definitive remedy. Note also that the computation of the roots of the minimal
polynomial can be itself an unstable process. Finally another drawback with the
use of the minimax polynomial is that if a polynomial of degree m is used then the
intermediate vectors xi with i~m do not approximate the exact solution x. Only the
last vector Im does in theory. The implication of this is that one cannot stop the
process and test for convergence before the m steps are all performed. If the
accuracy is unsatisfactory after the m steps, one has the alternatives of either
recomputiang another polynomial with different degree and restart 2.5 or perform
again a steps of iteration 2.5 with the same polynomial.
It will be seen that all of the difficulties mentioned above can be avoided
by using polynomials that are small in the two intervals in the least squares
sense i.e. polynomials which minimise the norm with respect to some weight
function w(x). This brings up orthogonal polynomials in two disjoint intervals.
-4 7
7
3. Oktoaau s ol nuamilsA&a In Dsji Rnt IntlaLs
3.1. Basis defialtIons ad notation
In this subsection we will describe general orthogonal polynomials in two
disjoint intervals. Let (a,b). (cd) be two open intervals such that b ( 0 <
c. The assumption that the origin lies between the two intervals is not essential
for this subsection. We consider a weight function w(x) on the interval (a,d)
defined by
Wl(z) for x e (ab)
w(Z) = w2 (m) for x e (c,d)
0 for x C (b,c)
where wl(x) and w2 (x) are two nonnegative weight functions on the intervals (a,b)
and (c,d) respectively. The inner product associated with w(x) will be denoted by
(. ., i.e.:
(f,8> = fJ f(x)g(x)w(x)dx
or:
(f,> -A f(z)g(z)wl(z)dx + _ f(x)g(x)w2 (z)dx (3.1)
The norm associated with this inner product will be denoted by 1I.11c i.e.
IlfIl = (f,f>1l 2 . We will often use the notation (f,g>1 and (f,8>2 for the first
and the second term of the right member of 3.1 respectively.
The theory of orthogonal polynomials shows that there is a sequence (pn) of
polynomials which is orthogonal with respect to (.,.>. All of the properties of
the orthogonal polynomials in one interval hold for the case of 2 intervals,
provided we consider these polynomials as being orthogonal on (ad) rather than on

(ab)U(c€d). For example although we cannot assert that the roots are all in
[ab]U[c,d]. we know that they belong to the interval [a,d]. Cases where one root
is inside the interval (bc) can easily be found. But the fondamental three term
recurrence relation which holds for all sequences of orthogonal polynomials is
obviously valid. Thus the polynomials pn satisfy a recurrence of the form:
Pn+lPn+l() = (X-Cn)Pn (x) - Pn~n-l(x) (3.2)
with
an (xPn>pn ) (3.3)
11 iiM <llc > 1/2 (34)on+ W n+l C Pn+lPu+l
where
;n+1 x) = (x-a n)pn(x) - PnPnSl(Z) (3.5)
One important problem considered in this paper is to find weight functions
for which the coefficients alp Pi are easy to generate and to propose algorithms
which generate them. Before entering into the details of this question in the
next subsection let us briefly outline how these polynomials may be obtained.
First select two weight functions wI and w2 such that for each of the intervals
(ab) and (cd) the orthogonal polynomials considered separately are known. Then
express the orthogonal polynomials in (ab)U(c~d) in terms of the orthogonal
polynomials in (ab) and in terms of the orthogonals polynomilas in (c,d). Te thus
obtain two sets of n+l expansion coefficients expressing the polynomial pn Using
these coefficients we are able to obtain the recurrence parameters an and n of
* equation 3.2 by formulas 3.3 and 3.4. Hence the two sets of expansion coefficients
can now be updated by use of 3.2 to yield the expansion coefficients of the next
polynomial Pna+ etc... Next the details of this procedure will be developed for a
Judicious choice of wI and w2 .
9
3.2. Generalisd Chebysh.v polynomials.
Let c1=(a+b)/2, c2=(c+d)/2 be the middles of the two intervals and
d1=(b-a)/2, d2=(d-)/2 their half widths. Consider the following weight
functions:
wl(x) - (2/) [d12- (X-C1)
2 ]-1/2 for x e (ab) (3.6)
S w2(x) = (2/) [d2 (X-C2)2 1-1/2 for x e (c,d) (3.7)
The orthogonal polynomials in (a,b) with respect to the weight function w1 can be
found by a simple change of variables to be:
T [(X-C 1 (3.8)
where T is the Chebyshev polynomial of the first kind of degree n. Likewise inn
the second interval (c,d) the orthogonal polynomials with respect to w2 are the
polynomials:
T [(i-c2 )/d2 (3.9)
We are interested in the polynomials p n(x) which are orthogonal in
(a,b)U(c€d) with respect to the weight function w(x) defined by w1 in (ab) and
in (c,d). In order to generate these polynomials we simply express them in terms
of the polynomials 3.8 in (aob) and in terms of the polynomials 3.9 in (c.d) as
follows:
nPn(z)_ I . n) T i[ (U-)/d1 (3.10)
i0
PnW) I 6 (n) Ti[lX 1()/d ] (3.11)n -02 2
The following proposition will enable us to compute the coefficients an and
Pn+1 given the ys and the Vs

I-7
- - -
10
rpjjsiti L.: Lot n k 3M Ixaamial of dAee n havingL fllo2yUin
eznansions in £aIb) &nd £,dA
np(x)= I= YiTi[UX-C1)/d 1 I for z e (a,b) (3.12)
i=0n
p(x)=-1 6oiTi[(X-c 2 )/d21 for x e (c,d) (3.13)
Set:
' U-1 n-1
(Pnp> 1: 21 + a2 (3.14)
(xp,p> =c I I + 2 + dl 1 +d2'2(.5
Proof: Consider 3.14 first. From 3.1 and 3.12, 3.13 we have:
n n
(Pop>-<i=1 Y T [(X-C )/d] "iy1 iT i[ (x-c1)/dl] )
Using the change of variable y (X-C1)/d I and the orthogonality of the Chebyshev
polynomials we obtain
2 n_ 2(P , P>I 1 = 2 y o + '1fi= 1
By the same transformations we would obtain (pop>2 = a2" Hence (pp> - <pep>1 +
(P-0)2 ' a1 + e2 which is precisely 3.14.
In order to prove 3.15 consider <xp,p)1 and <xp,p>2 separately. We have:
I X-Cl< Xp , p >1 d1< I < >1 + a 1 P >1 (3.16)
The first inner product can be transformed as follows:

11
1-01 1-
p.- p° >1 " < Ti[! d 1], Y Ti[ 1]l >
where 2 stands f or 2 . By the change of variables y Ithis simplifies into
- 2 +1
=X p . P> f +1 [ y Ti(Y) ]2 (1-y2 )11/2 dy (3.17)
Using the relations:
y Ti(Y) =1 [TI+I(y) + TiilY)
y To(y( ) T (y)
we find
2i y Ti(y) - ! TO(y) + ( + 2/2) Tl(y)
+ 1(yi-1 + vi+1 ) Ti(y) +... l'(yn-l + yn+i) Tn(Y)
For convenience Tn+l is set to zero. Replacing this in 3.17 and using the
orthogonality of the Chebyshev polynomials with respect to the weight function
(1-y2) 1 / 2 we get
( 1p - p >1 : !Y170 so+lYlY2/
1 1i(Tl+l+yt-1)ytst +"'+ 2(yn+1 + ¥n-1)TnSn
with s o = 2 and a, = 1 for i 0 . This finally yields
(Slp , P > V1-1
and by 3.14
XP , p >1 - clal + d1:1 (3.18)
A similar calculation would give
12
(zp.P>2 = e2@2 + d2?2 (3.19)
Adding 3.18 and 3.19 finally yields the desired result 3.15.
Q.E.D.
Once the parameters an and 0n+I are ocomputed by an appropriate use of 3.14
and 3.15, it is possible to generate the next orthogonal polynomial Pn+l (). The
next proposition provides a simple way of obtaining Pn+l when the expansions 3.10
and 3.11 are used.
P ropsition 3.2: e ( ) .... be th e qj Ot *hnmi polynomials
derived from .2 . jhe t he a(n) the YnnuI M I,1
satisfv the reurnc reai,
(n+l) d1 (n) (n) W( (n-1)Pn+li = j i(lYYi+l ) + i2,3....n+l (3.20)
Ni" the initial com:i2Da*
(n+l) (n) + ( n(n)- (n-i)Pn+lO - dly1 (3.21)
(n+l) (n).1 (n)1 W (n) (n-1)n+lyl d: 1l T (Y T2 2 + (01l'an )Y1 - Pn¥l (3.22)
Srelation anlsu Io 3-.LO &a AR whc jL, A& re e kX jg ui j At hod
foer .k 6'..
PrgoL From 3.2 we have
- 7(n)~n~lPn+l (z ) = (x-an) I1 T I(X-C1 )/d11 - An Y T(n-l) TI(_l)/dl
Using again the change of variable y-(z-o1)/dI for convenience we get
An+lPn+l ' (dl+Y+l-n) I y n) Ti(y) - On 1 Y(i1) T i(y)
Noticing that y T (y) - I( T11 (y) + Ti+I(y)) when i I 1 and y T0(y) - Tl(y)
we obtain:

13
d-(n)Pnl d~ -1 T (y) + Ti 1(y) +(€I- n) -_ T( T(Y)2n 1 n~l = 1 1Ti+1
(n-l) T (y)-n i-T i
with the notational convention T -1 TI . Therefore
,l id(n) (n) n) Tl(Y)~nj.~nl 1 1 0 + 2/2 1
+ 1(y (n) + (n)) T (Y) I +(c1 a n) ( T (Y)
(n-i) Ti(Y )
with the conventions stated in the proposition. Returning to the x variable gives
the desired expansion of Pn+l in the form 3.10 and 3.11 and establishes the
result.
t Q.E.D
The results of the previous two propositions can now be combined to provide
an alSorithm for computing the sequences of orthogonal polynomials. The idea of
the algorithm is quite simple. At a typical step the polynomial p is available
through its expansions 3.10 and 3.11 so one can compute an by formula 3.14. Then
we can compute the expansion coefficients of ;n+l using proposition 3.2. Finally
Pn+1 is obtained from 3.4 and 3.14 and Pn+1 is normalized by Pn+l to yield the
next polynomial Pn+l" This describes schematically one step of the algorithm
given below. A notational simplification is achieved by introducing the symbol
defined by
i-n i-n1 ai - 2 2 + a, (3.23)L=0 1=0
AOK I
Ca g iU t enalized Ckaknknz P nan als
1. IflALM. Choose the initial polynomial p0 (x) in such a way that

14
(0) (0) (0) (0) 1 (0) (0)YO :=u0 1 :~2 -Y D Z 2 : moo:=
2. Xtuats. For n-0 ,1,2....,n do
Compute % by formula 3.15:
(n) (n) (n) (n)an := cla1 +022 +dI 1 + d 2 2
- Compute expansion coefficients of Pn+i by formulas 3.20 - 3.22 andtheir analogue for the 6 'a.
-(n~) .(n). (n). (n-1)YO :-d 1 , c1 -a ny0 -pnO
-(n+l) (n) 1 (n) (n) (n-i)Y1 :-d l(YO '-2Y2 )+(Cl1 -a n)T1 -Pnl'I
~(n+l) d (n) + (n) -+ ( (n-)2 :ly1-1 + + (-
i=2,3,. .. n+l
-(n+l) - (n) . ,(n) . (n-1)
0 261 +2 n 0-PnO
'(n+l) - -(n) 1 ,(n) . .. (n)-_ _(-l)&1 :=d2 (6 0 V22 )+(c2 " l -a)6 1 A n 6
(+l). d2 (n) () + - (n) .(n-1)S "'2 -1 + (2-n)6i -ai
1-2,3,.... n+1
- Compute 1; n+l1i by formula 3.14 and get Pn+1 by formula 3.4:
n+1-(n+) n+ 2
n±1:(n+l) E-(n+1)]2a2 i
iI1
-(n+1) -(n+l) 1/2P~n+ 1 := [ a 1 + a2
- Normalize Pn+l by An+1 to get a+1
Yi : t Uln+i 1 9 i : + 1

15
i 0 ... ,n 1
- Compute now a's and v s
(n+l) -(n+1) 2 (n+l) -(n+l) 2a1 : =i61 / Pu 2 2: 1 m /n 1i
(n+l) l) (n+l) (n+l) - (n+l) (n+1)1 : i T Il " 2 :W 1 i i6+11
At the nth stop of the algorithm one performs approximately 20(n+l)
arithmetic operations. Concerning the storage requirements, we must save the
(n) (n) (n-l) (n)coefficients y ,b0 as well as the previous coefficients Y0 , and 60
which means 4(n + 1) memory locations, if nax is the maximum degree allowed.maxnx
This suggests that, in practice nmax should not be too high. Note that restarting
could be used if necessary.
3.3. The minimal polynomial
Consider the orthonormal polynomial p3 of degree n produced by Algorithm 1.
According to section 2, an interesting approximate solution to the system A x = b
would be the one for which the residual vector rn satisfies:
rn = [pn(O)]- 1 pn(A) to
It is easily verified that such an approximation is given by
n = 10 + Onl( A ) r 0
where
Snal(x) - I P(O)]-1 [p(O) - pa(x)) / x (3.24)
Practically and theoretically however this approach faces several drawbacks.
First, it may happen that p3 (0) is zero or very close to zero. In that case the
thn approximation xn either is not defined or becomes a poor approximation to x(n
-- 6
16
respectively. Although this difficulty might be overcome by computing 1 n+l
directly from Xn I , this will not be considered.
A second disadvantage of using the orthogonal polynomials pn is that they do
not satify a suitable optimality property. More precisely the norm lIpiPn(O)I11
is not minimum over all polynomials of degree not exceeding n satisfying pn(0) =
1. This fact deprives us from any means of comparing the residual norms, and
above all does not ensure that the approximate solution Zn will eventually
converge towards the exact solution x.
These remarks lead us to resorting to the polynomial qn of degree n such that
qn (0) - 0 which minimizes the norm lql c over all polynomials q of degree j n.
Writing the polynomials q as q(x) - 1 - x s(x) where a is a polynomial of
degree not exceeding n-I, it is clear that our problem can be reformulated as
follows:
Find & volvnomial s e g MIg:
Ill-x Sn-l(x) II . IIl-x s(x)ll c . V a 4 pn-1 (3.25)
Here 1-is(x) denotes the polynomial q defined by q(x) 1- xp(z) rather than
the value of this polynomial at x.
From the theory of approximation it is known that the best polynomial sn-1
exits and is unique [3). Furthermore the theory of least squares approximation
0indicates that the solution a_ 1 must satisfy the equations:
C
(1-XS x s(x) >=O V a ePn-1 (3.26)
To solve 3.26 lot us aassume that we can find a sequence of polynomials
qjj0,l,..n-l,. such that the polynomials zqJ(z) form an orthonormal sequence
with respect to > , ). Then expressing a 1 as
N-1a
17
• n- z- q W xan1 j.O J J
we obtain from 3.26
l1j = <lD xqj(x) ) (3.27)
It turns out that the polynomials qj(x) can be obtained quite simply by an
algorithm which is nothing but algorithm 1 with a different initialization. This
is because we actually want to compute an orthogonal sequence of the form (xqn)
with respect to !he same weight function -Wa 88 before.
Practically we will have again to express the polynomials xqn(x) by two
different formulas as in subsection 3.2:
n+lxqn(x) = I0 a Ti(x), x e [a,b] (3.28)
i=0n~l (n)
-qnlx) -I16 Tx W x [ecd] (3.29)
Denoting by a and Pn the coefficients of the now three term recurrence whichn n
is satisfied by the polynomials qn we obtain:
n+1%+j() - U- Q); (x) -P%-.(x) (3.30)
which is equivalent to:
An+l xq3+1 (x) - (X- an) x%() -o' zq.,(x) (3.31)
The condition that the sequence ( zqj }J=0,.1..n.. Is orthonormal gives the
following expressions for a' and An:
'-(x (za), x > (3.32)n d'
p'' l- I1x+q IC - i(x - ,)ix%(x) - (3.%l3) ic3
It is clear froa the above formulas that the Algorithm for computing the
18
sequence zq (z) is essentially algorithm 1 in which the initialization is
replaced by a now one corresponding to the starting polynomial zqo (x) x instead
of P0 (x) - 1. Thus the orthogonal sequence xqn(x) replaces the sequence pn (x) of
algorithm 1.
We must now indicate how to obtain the expansion coefficients it of the
polynomial Sn* in the orthogonal basis q ). AccordinS to 3.27 we have
1 j= (1,xq )
Hence
tj " T0 ,zqj) 1 + (To0xq j 2
2( T(J ) +6# ( J ) (3.34)
Here we recall that the weight function w has been scaled such that
<T0 T0 >i-2. i- 1,2 and <T ,T i > 1 for JOO, i-1.2. As a consequence of 3.34 the
expansion coefficients in can be obtained at a negligible cost. Te can now write
down the algorithm for computing the orthogonal sequence qn(X). For simplicity the
prime symbols will be dropped.
1. JALtialLt . Choose the polynomial xqo(x) in such a way thatqOmcoustant and IlxIlc 1.
2 2 +2 2
t2:-2(c1 + c2 ) + d 2+d2
t:t21 / 2
T(0) :- ,6(0)..
0(0 ) :(0)T 1. 1 :-d o.
*(0) 2 2(0) 2 2a1 [- 201 4] d/t2,a 2 Me [22 + d2 11t2,

_____ lP- - :- -- e
____ _____-__-__7 2
19
(0) (0) (0) (0) : (0) 5(0)1 :2 0 1 2 0 1
2. Itera. For n-0,1,2 .... n, do
- Compute a by formula 3.15:n
(n) (n) (n) (n)a:cai +026 +d T + d2n 1 1 e202 +a11 22
- Compute expansion coefficients of q-+l by formula 3.20 - 3.22 andtheir analogue for the 6 '.
-(n+l). (n) (n) (n-i)Y :inly 1 +(c--eny 0 +(no
"(n+l) ()(. 1 (n (n) (n-1)¥1 1 l(T0 2" ) +tel-1muTI -Pny1
(n , (n) (n) (n) (n-1)Ti .So 2'lT -1$ + Tr +I") (cl-a n )Ti - .yi
i=2,3 .... ,n+2
-(n+l). - (n) u.. (,) (n-1)0 d261 +(c2-an 0 -P,6
-(n+l) (n) 1 (n) (a)- (n-1)81 :-d2 (60 V2Y 2)+(c2-%n)b 1 Pn 61
g(n+l) d Cn) Cu), + (n) (n-1)
i *-22°6-1 + 8i+l 2 n )i Pn i1
i-2.3.... ,n+2
- Compute II*.+l by formula 3.14 and get 0n+1 by formula 3.4:
-(n+l) n1 (7(n+l) 2 (n+l) n .1aI a- :. i r(nii2 i-i
'(n+1) -(n+l) 1/2'+I l 2
- Normalize 'n+l by A +I to Set
(n+l) ~;(,+1),, 6 "+ 1 ) : Innl l
i i P+I i i n+1
- Compute new a's and v's

20
(n+l). -(n+l) 2 (n+l) ~(n+l) 2a1 : =1 /n+1 a2 : n2 n+l
(n+l) ,(n+l) (n+l) (n+l): R _n1 i Yi+i 2 1 1 ,6( +l1i-On
Note that part 2( iterate ) is identical with part 2 of algorithm 1. It is
important to realize that the above algorithm does not yield directly the
polynomials qn but rather provides their expansion coefficients in terms of the
Chebyshev polynomials in the two intervals. In the subsequent sections we willC
need to generate the polynomial s (x). This can be achieved by coupling with partn
2 of the above algorithm the following
n~l [A n)qnlx ) _fnqnls)'n+
.(n+l) (n+l).1n+ l : M 2-( yo + 6 0
*n+l:1 'n + ln+lqn+1
starting with
.ox-/ , o(x) -My(0) + 6(0) 9, z0)
where t is defined in the initialization of the algorithm.
3.4. Comparison with the minimax polynomial.
The purpose of this subsection is to compare the norms of the minimal
polynomial described in the previous subsection and the polynomial having the
least uniform norm in [a,b] U [c,d] subjeot to the constraint p (0) - 1. We will
denote by Ilpil, the uniform norm on [a.b] U [c,d], that is:
ilpll,- mal Ip(z)Ize [a,bJU[o.dJ
C C
Let us denote by pn the minimal polynomial 1 - zsn-l(x) of degree n. defined
in section 3.3. and by p the polynomial of degree n of least uniform norm in
- '+ . . .. ' ' " ' + " i ' il I lin I il I I I l il l l ...n
- .. . - =
21
[a.b]U[c,d]. In other words we have
(3.35)
I1p:ll C Ilpll C, p CP
IIpI ll. Ilp1l, - p e P (3.36)n
Since P is a finite dimensional space all the norms of P are equivalent andn a
the following lma indicates precisely a comparison of the norms II.ll1 andI I*ll.
Lena 2A.: Let f be any polynomial of degree not exceeding n. Then:n
1) Ilf 11lC 2 Ilfnll. (3.37)
2) 1lfll 11 ln+l) 11211f n 11C (3.3s)
Proof. 1)
Ilfi c (f n f > <fn f >l+<fn" fn>2
b 2df(z) w(x) dx + f f2(x)w2(x) dx
n a 0
and finally
,Ilf I 1121nl lC J 4 lfnll!
which gives the first result by taking the square root of both members.
2)
Ilf 1lo max If (x)ixe [a)U[cdJ
Ilfl i.-max(max I yT IT[ x-oI )/d i ,max I 1 S iTi[ 1x-2)/d21 1)(3.39)xG[a,b) inO xO(c.dJ 1-O
22
where the y's and the 6's are the expansion coefficients of f in [a,b] and [cod]n
with respect to the polynomials 3.8 and 3.9 respectively. Usin$ the Schwartz
inequality we get
a
1 -r T 1 1 1 T'j[(x-c 1)/d 1 11 'i=O i=O 1=O
Hence
n ( 2 1/2
I tiTi[(X-Cl)/di]I S (n+l) 1 [1 y ] (3.40)i=O i=O
Likewise we can show that
T n12 2 1126iTi[(x-c 2 )/d 2 ]I .. (n+) 1 [ 2 i (3.41)
i=O i-0
Replacing 3.40 and 3.41 in 3.39 we get
n 212
hf n II. (n+l)1/2 max[ [ I211 I I i]
n 2 2 1/2S(n+l)~
j n+1) 1 1 2 [ _ , ' +6)i-0
- (n+l)112 Iltnll c
Here we have used the result of proposition 1 and the notation 3.24
Q.E.D
As an immediate consequence of 3.37 and 3.38 we can easily bound each of the
norms II I and J in terms of the other from the left and the right as inC i
the next inequalities:
(n+1)-11 2 wlall. IIfnIIC 2 Ilifll . (3.42)
_We now st ' th llmn - (o+1) I Ctio esame
We now state the main result of this subsection which compares with the same
23
norm the polynomials pn and p n
Theorem JA: Lot pn Ma pn be the mLmagx polynomial and I minimal polynomialn-
defined bj 3.35 and 3.36. Thent Ihe folig i .1alitieL hold.
I Ip:IcS11 S. n iipi c (3.44)
1 pll. Ipull. S 2(n+1) 1/2 11p .3.45)
Proof: We will only prove 3.44 as the proof for 3.45 is identical. The first
part of the double inequality is obvious by equation 3.34. The second part is a
simple consequence of lemma 3.3:
Ilp~ll C j (n+1)1/2 Ip-llo i(n+1)1/2 Ilp~ll.
S 2(n+1) 1/2 IIp.ll c
Q.E.D.
The meaning of the theorem is that the two polynomials pn and pn have a
comparable smallness in (a,b] U [cd]. This will have a quite interesting
implication for the numerical methods using polynomial iteration since it means
that we can replace the minimax polynomial by the least squares polynomial, which
is by far easier to generate and to use, and still obtain a residual norm which is
not larger than 2(n+l)1/ 2 times the norm corresponding to the minimax polynomial.
Note that there is no reason a priori why to compare the two polynomials with one
particular norm rather than the other. If the norm l IIC is chosen then the
polynomial p is smaller than the polynomial Pn while with the uniform norm then n
contrary is true. Whichever norm is used however, the two polynomials have a norm
1/2comparable within a factor not exceeding 2(n+l) 2
, as is asserted in the above
theorem.
24
4. A&n.lia to t Ig .jM solutiono g larg AaqAjti jylMa
4.1. The Generalised Chebyshe Iteration
Let us return to the system 2.1 and suppose that we have an initial guess x
of the solution. We seek for an approximate solution of the form
= x0 + an- (A)r0 (4.1)
where a is a polynomial of degree n-i and r0 the initial residual. The
residual vector r of x is given by
r = [I-As W(A)] r0 (4.2)
The development of the previous sections lead us to choose for an_1 the polynomial
n-l which minimizes Ili-xs(x)II C over all polynomials a of degree j n-l. From
subsection 3.3 we know that:
n-inl(x) = q 2 (x) (4.3)
where the qj (x) satisfy the recurrence 3.30 and
1j = 2(y (j) + 6 (J) )
Let us assume that the coefficients a, n as well as the y's and 6s are
known. Noticing that
11 1 qn+l (z)8n+l(x). Sn(X) + n+l
and letting u . qj( A )r0 , it is immediately seen from subsection 3.3 that the
approximate solution x can computed from the recurrence:
Tn = 2[y0(n) + 6 0(n) 1 (4.4)
Xf •n +1 :M xn +- in n n

25
u+1: [(A-a' I )u - P' u ] (4.5)n+ n+1 n n-
Clearly the coefficients P o a' and in can be determined at the same time asn n n
4.5 and 4.4 are performed. Therefore a typical step of the algorithm would be as
follows:
1. Compute a' , n nd the coefficients y'(n +l ), 61 (n+l) (see part 2 ofAlgorithm n.
2. Compute:
qn 2[y0 In ) + 80(n )] (4.6)
Xn+1 xn + jnUn (4.7)
Un+l i [(A-a' I )un - A' un-] (4.8)
Pn+l n n n-
We will refer to this algorithm as the Generalized Chebyshe, Iteration
alzorithm. Although we need not save the coefficients a' and P;, if a restartingnn
strategy is used in which the iteration is performed with the same polynomial it
will be more efficient to save the coefficients a' and P'.
Note that the multiplication by a scalar in 4.7 can be avoide4 ',-y using
instead of the vectors un the sequence of vectors u'n defined by:
up 1j uUn n qn
which can be updated in no more operations than are needed for u n
Each step of the above algorithm requires one matrix by vector
multiplication, 3N additions 3N multiplications and O(n) operations, at the nth
step. Four vectors of length N need to be stored in memory plus an extra O(n)
locations for the coefficients y amd 6. A feature of the Generalized Chebyshev
Iteration, which is particularly attractive in parallel computation is the absence

26
of any inner product of N-dimensional vectors.
4.2. A minimal residual type implementation
A look at the previous algorithm reveals a similarity with one of the various
versions of the conjugate gradient method which is described in [2]. One might
ask whether it is possible to provide a version of the method which resembles the
conjugate gradient or the conjugate residual method. We are about to show here
that the answer is yes and we will provide a method which is very similar to the
conjugate residual algorithm described in (2].
To be more specific we are looking for an iteration of the form:
In+, = xn + an Vn (4.9)
r n+l =r n -a n A wn (4.10)
iWn+ I ' n+i + bn w (4.11)
where the scalars a n b are some cowtficients that are computed in such a way
that at each step the residual r+ 1 is precisely the residual obtained by using
the minimal polynomial as described earlier.
There are two main reasons why such a new form of algorithm 3 might be sought
for. The first is that the above version is slightly more economical than
algorithm 3, specifically 4.9 to 4.11 can be performed with N less
multiplications. Note also that N less storage locations are required in the case
where the matrix by vector multiplication can be performed componentwise, i.e. if
the i-th component of Ax can be delivered cheaply for all i. The second reason for
looking for a version of the form given above is that the residual vector is
available at each step of the iteration.

27
Some theoritical background is necessary for the understanding of the
remainder of this subsection. The development of the conjugate gradient like
method to be presented is based on the simple remark that the approximate solution
xn belongs to the affine subspace xO+Kn where Kn is the so called Krylov subspace
spanned by r0 , Ar0 , A 2r0 ,... A -1r0 . Then the key observation is that there is
a one to one mapping between the subspace In and the space Pn- of polynomials of
deree not exceedng n-l. In effect for any element u of n of the form u = pr0
n-i+ ~r + .... + nlA r0 , we can associate the polynomial qu(t) = P0 + PIit +
.... +P nlt . Clearly the transformation which maps u into qu is an isomorphism
betweenKn and Pn-l" We now introduce a new inner product on Kn"
Definition: We will call Generalized Chebyshev inner product on K and will denoten
by (",)C the bilinear form defined by
(Uv)c = <(,v> (4.12)
where (.,.) is the the inner product on Pn- defined by 3.1. 3.6 and 3.7.
That this constitutes an inner product is an immediate consequence of the
isomorphism introduced above. There is no ambiguity in denoting again by tl.II C
the norm on K induced by this inner product . We then have the followingn
immediate result.
Polosition 4.1: A each L.te O2 the Geralized Chebvshev iteratiLon, the
j3iurjUint_ solution xn mi IM genalized thheyshe Agg" aama i Jf-Azx IC O1
th residual vectors zAz over aU vectors z o Kn
In other words we have:
1lf - A xll 1 lf - Ax IV x e Kn
The proof of the proposition is straightforward.
-- *- * - i..,
28
The most convenient way of deriving a version of algorithm 3 equivalent to
4.9-4.11 is to use a little analogy. Indeed since we want to minimize the residual
norm with respect to the generalized Chebyshev inner product 4.12 we can use an
adapted version of the minimal residual method which achieves the same goal with a
different inner product. The version given below is precisely an adaptation of the
conjugate residual method described in (2].
1. Initialize. Choose an initial vector x0 and compute r0=f-Ax0 , V0 r0 .
2. Iterate.
an :- (xqr qr /(1q xq%> (4.13)n n n n
1 x +A w n (4.14)
rn+1 :r n -anAw n (4.15)
b :- <xqr 'qr / zqr qr > (4.16)n+1 n+1 n n
wn+1 n+1 + bn wn (4.17)
qwn+1 qrn+1 + bn n4.18)
The computation of the inner products involved in 4.13 and 4.16 can be
carried out in a similar way as before by use of proposition 3.1 together with
expressions similar to 3.12, 3.13 for each of the polynomials qr and q1 but wen n
omit the details.
As with the conjugate residual method in the indefinite case, the above
algorithm faces a risk of breakdown in equation 4.16 because <xq ,qr > can ben n
equal to zero. We do not know under what circumstances the inner product
<xq ,q ) vanishes but our short experience is that this does not often happen.n r2
29
We will prefer algorithm 3 in general depite the little extra work and possibly
storage involved. Note that it is also possible to write a conjugate gradient type
method which would correspond to using as residual polynomial the orthogonal
polynomial of subsection 3.2, instead of the minimal polynomial of subsection 3.3.
4.3. A Block Generalization
A block algorithm can be derived from the Generalized Chebyshev Iteration
described above. The principle of the Block algorithm is similar to that of the
Block Stieffel iteration proposed in [111.
As shown in fig. 4-1 if an eigenvalue X i lies inside the interval [bc] then
p (i) is large in comparison with the other p ( ), with j 0 i.
As a consequence the residual rn - p(A)r0 will be mainly in the direction of
the eigenvector zi asociated with Xi" Therefore by a projection process theii
component of the residual in this direction can be eliminated leaving only the
small components in the directions z with j 0 i. Let us now assume that instead
of one eiSenvalue )IV we had m eigenvalues ,).i+1 ,..... i+z_ 1 inside [b,c], and
that we are performing m different Generalized Chebyshev iteration, using m
different starting vectors x0 1 ,x0 2 .. . ,0o"n. We can again make the same
argument: the residuals rn,k at the nth step will have their dominant componants
in the eigenvectors zi,zi+l,...,zi+ 1 and we can eliminate these components by
projecting onto the subspace spanned by (rn, )j-l,2,., m . It was shown in [11]
that in the positive definite case, the rate of convergence of the Block Stiefel
Iteration is in general substantially superior to that of the single vector
Stiefel Iteration.
The block algorithm is more particularly suitable for parallel computation
since the m Generalized Chebyshev iterations involved a. can be performed

30
MINIMRL POLYNOMIRL OF DEGREE 15
1.100 r- , .. .V.. . l. .. .I- I . .F I
0.600 -
-~ I
-
0. 100 -
-0.400--a & J-2.000 0.000 2.000 4.000 6.000
x
Figure 4-1: Minimal polynomial with some *igenvalues in [b~oJ
31
simultaneously. Ignoring the matrix by vector multiplication, intercommunication
between the processors is needed only when the projection process takes place,
which is infrequent. As mentioned earlier the fact that there are no inner
products of N dimensional vectors is a further advantage of this algorithm in
parallel computation.
4.4. A Priori Error Bounds.
We now establish an a priori error bound which will show that the Generalized
Chebyshev Iteration is convergent. We should emphasize however that the bound
given here is proposed for the sole purpose of demonstrating the global
convergence of the process and does not constitute a sharp error bound in general.
The next theorem is based on the following estimate of the residual norm
which is an immediate consequnece of lemma 3.3
Lema 4.2: At the n-th step of of the Generalized Chebyshev iteration the
residual norm r of the approximate solution x satisfies:n n
Ilr 11 J (n+)/2 II phll c II r11 (4.19)n
Proof: From equation 2.4 we have
lirnil 1 liroll max Ip(. L H
Therefore
lirn1l J Ilr 0 11 ln1 .
The result follows from inequality 3.37 of lemma 3.3.
Q.E.D.
Theoau 4_1: snuoose I tkt mila. oi A I& coained AR Lak ~ and ILo
• , - . . . ,,I. . . . . . . . . . . .. . . I I I I I I I i . . . .. . . . . . . .
32
m = minulblhlcl) U - maz(lalldl)
Then at the n th 11M of the Generalized .akbzak u Itoation 2 h residual vector rn
satisfies As- ineguality:
l2( 3+ )1/2 li Oi (4.20)
where A. is the integer division of n b " & id Tk £WJA*&n1 thke ChkbX
polynomial of deLree k of jhe first kind,
Proof: By equation 4.19 we have
I lrn 11 (n+l)1/2 I11 ll (I I (4.21)i (n+1)1/2 IlplcIrl
C 0
for any polynomial p of degree j n such that p(O) - 1. Consider the polynomial:
t n(Z) - T f[q(x)] T n[q(O)]
with
q(z) _ ]i2 + m2 - x2 ]/[ 2 - 22 ]
The degree of t is I n and we have t (0) 1. Therefore from 4.21 and lemma 3.3n n
we get
Jirnal1 .j (In+l) 1 /2 i~tnJ11 C Iliol] . 21n+11 112 i~tnaJJ.J1rol
To complete the proof we observe that t has been chosen in such a way thatn
litnIla -[Ta(q(0)) 1-1 because for x belonging to [a.b]U[o,d], ltn(z)I j 1, the
value 1 being reached for some i's in Ca.b]Utc,d]
Q.E.D.

33
Note that ideally M2 and a2 are the largest and the smallest eigenvalues of
A 2 . Hence an interpretation of 4.20 is that n steps of our algorithm will yield a
residual norm not larger than 2(n+l) 1/2 times the residual norm obtained from
rn/21 steps of the classical chebyshev iteration applied to the normal equations
A2 x = A b. This result is however a pessimistic estimate as the numerical
experiments show.
S. ApplicatiLonto th EoautakoIa e lszanctozL assocLated Nt interior
Diuson ue •
Consider the eigenvalue problem
A z - X z (5.1)
where A is N dimensional and symmetric. When the desired eigenvalue X is one of
the few extreme eiSenvalues of A, there are a host of methods for solving 5.1,
among which the Lanczos algorithm appears as one of the most powerful. When X is
in the interior of the spectrum then problem 5.1 becomes more difficult to solve
numerically. The Lanczos algorithm often suffers from a slow rate of convergence
in that case and may require a number of steps as high as several times the
dimension N of A. A further disadvantage of this is that the Lanczos vectors must
be kept in secondary storage if the eigenveoctors are wanted. This might be
acceptable if a large number of eigenvalues are needed but when one only seeks for
a small number of them, possibly with a moderate accuracy, then the use of
techniques based upon subspace iteration should not be discarded.
We would like to indicate in this section how the polynomials described in
section 3 can effectively be used to ,btain approximations to eiSenveoctors
associated with interior eigenvalues. Consider an approximation to the eigenveoctor
z of 5.1 of the form:
34
Vn p (A) v0 (5.2)
where v0 is some initial approximation of z and pn a polynomial of degree
n. Writing v0 in the eigenbasis (z,)i.,,.. N as
Nv0 = i i
we obtain:
N= n 1Ci pn(oi) '1 (5.3)
which shows that if v is to be a good approximation of the eigenvector z then
every p n(Xj with j 0 1 must be small in comparison with pn (Xi . This leads to
seek for a polynomial which is small in [).,*) I]U[) ).N J and which satisfies1'i-i
pn(?i) = 1. In other words we need to find a polynomial of the form
-(x-)i )t nl(x-). i) which is small in these intervals in the least squares sense.
The simple change of variables t = x-X i trasforms this problem into the one of
subsection 3.3 thus providing an algorithm for computing an approximation to the
desired eigenvector associated with A.,. Note that in practice Xi is not available
and is replaced by some approximation p which is improved during the process. We
will find a polynomial in the variable t which corresponds to the operator A -I
i.e. the approximate eigenvector v will have the formn
vn P(A-pI) v0 I [ I - (A-pI) S*(A-I) ] v0
en
where p is the least squares polynomial obtained from algorithm 2 with
a I b- X - , € - d- XN4-p
where Xi-l and Xi+l are replaced by X- and X+ respectively.
An interesting problem which arises here is to estimate the interior
parameters b and a, or more precisely to refine dynamically a given pair of
35
starting parameters bc. This is discussed in the next section and a few
suggestions are given there.
An obvious extension of this algortibm which we omit to consider here is the
subspace iteration otherwise known as simultaneous iteration method ( See
e.g. [91)in which one iterates with a block of vectors simultaneously and uses the
Rayleigh Ritz projection approximations from the subspace spanned by the blocks.
6. Som rail considerations
6.1. Projection teohniques and the estimation of the optimal parameters.
Little was said in the previous sections about the determination of the
parameters a,bac,d. It is not often the case that these parameters are known
beforehand, and one has to provide means for computing them dynamically. This part
of the algorithm is a determinant factors of the efficiency. Let us recall that
a,d are ideally the smallest and largest eigenvalues 1 and "N of A, while b and c
should be equal to the eigenvalues ).- and X+ closest to the origin with X-(O and
X+>0. The smallest and largest eigenvalues X and XN are easier to estimate and
we have several ways of doing so, the simplest being perhaps the use of Gershgorin
disks. The use of the Lanczos algorithm is also particularly interesting since it
yields at the same time a good estimate of the parameters a,d and a fairly
accurate starting vector for the iteration(see e.g. [7]). It is a fact that the
eztremal parameters a.d which are easier to compute are also more important for
the convergence: if a is larger than I. or d is less than XN then there is a high
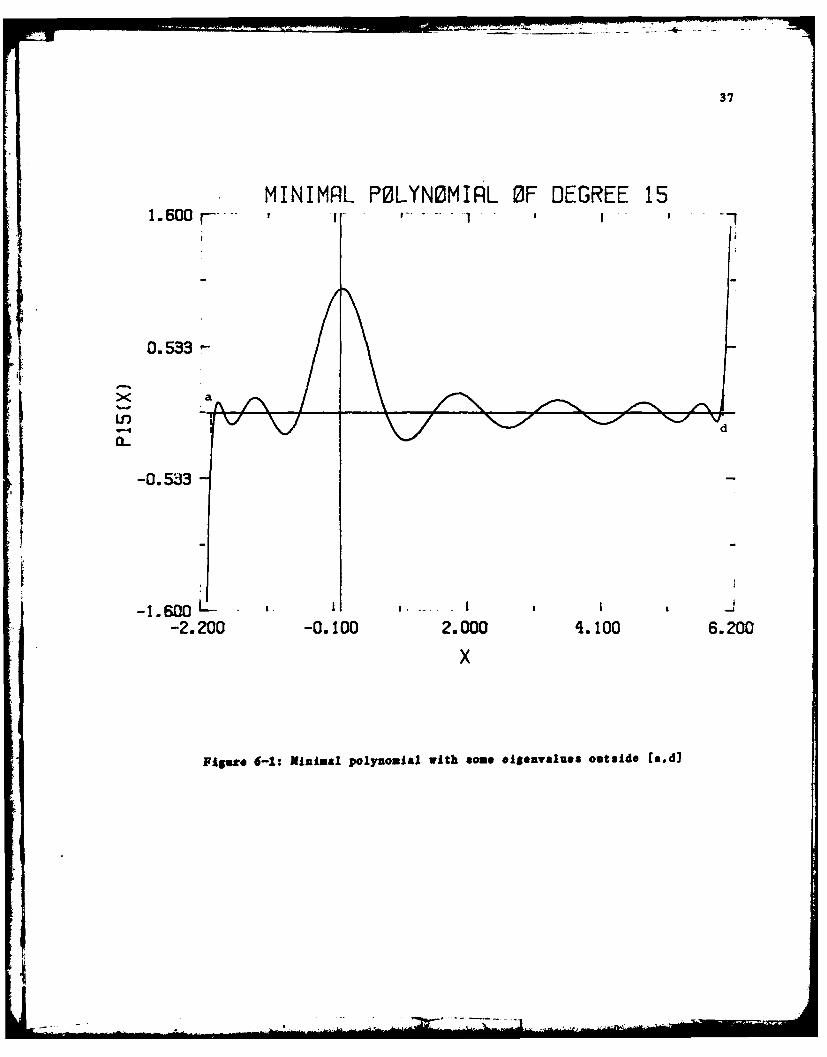
risk that the process will diverge. This is because outside the interval [a,d] the
residual polynomial can have huge values as is seen in figure 6-1. When this
happens however nothing is lost because we can stop and use the (huge) residuals
as approzimate eilenvectors associated with XI and XN thus providing more accurate
36
estimates of both a and d, with the help of the Rayleigh quotient. (See figure
6-1)
For the interior parameters b and c a projection technique based on a similar
principle can be developed. In effect if we start with two approximations b and c
such that b < X and c > X+,then as is seen from figure 4-1 the residual vectors
will have large components in the eigenvectors associated with the eigenvalues X
and X+ closest to the origin. A Rayleigh Ritz approximation can therefore by
applied to extract more accurate estimates of X- and X+ from two or more residual
vectors.
In fact a more complete procedure can be described as follows. Suppose that
we start with an interval [b,c] sufficiently wide to contain the eigenvalues X
and X. Then after a number of steps the residual vectors will give an accurate
representation of the eiSenspace corresponding to the eigenvalues contained in the
interval [I-,X+ 1. Therefore a projection process onto the subspace spanned by a
small number of successive residual vectors will provide not only a good
approximation of the eigenvalues I- and X+ ' but also the Rayleigh Ritz approximate
solution wiil be more accurate than the current approximation. In practice we
will iterate with a polynomial of fixed degree. We will orthonormalize the m
latest residuals where m is usually 5 or 6 (in order to have an accurate
representation of at least three eigenvectors ). Calling Q the orthonormal set of
vectors obtained from this orthogonalization. we compute the Ritz matrix T A Q
and its eigenvalues by e.g. the QR algorithm. We then compare tAw Ritz
eigenvalues thus obtained with those of the previous projection. After a certain
number of iterations some of the Ritz eigenvalues will converge to a moderate
accuracy (say to 2 or 3 digits of accuracy). As soon as an eigenvalue which
corresponds to either %-, or X+ converges, we replace b or c by that eigenvalue.
When both of the eigenvalues have converged, we replace the approximate solution
37
MINIMRL P0LYN0MIRL OF DEGREE 15
0.533
X ai
.- 4 d
-0.5 3
_1.600 _ I-2.200 -0.100 2.000 4.100 6.200
x
FiSuze 6-1: Minimal polynomial with some eiSeavaluea outside [ad]
38
by the Rayleigh Ritz approximation = X + I Ix 1 zr where the sun is over thenJ n
converged Ritz eigenvalues X and the z. are the associated approximate Ritz
eigenvectors. Recall that z1 is defined by z = Q.s1 where s is an eigenvector of
QT A Q associated with the Ritz value The effect of this important projection
step is to eliminate the (large) components of the residual in the direction of
the converged eigenvectors and is quite effective as will be seen in some
experiments described in section 7. A useful variation here is to use the latest
directions of search u instead of the latest residuals. We thus avoid to compute
residual vectors. The reason for this is that q n(A)r0 is a vector having large
components in the directions of the eigenvectors associated with the eigenvalues
nearest to zero. Our experience is that the results provided by the use of un
instead of r are often slightly better than those using the uneconomicaln
residuals.
The above process is even more efficiently implemented in a Block version.
because then we have a good approximation to several eigenvalues at the same time.
Note that in this case we need to have the interval [b,c] enclose at least m--i
eigenvalues if m is the dimension of the blocks.
The same projection technique as the one described above can be implemented
for the problem of computing an interior eiSenvalue X i and its corresponding
eigenvector. We will drop the subscript i in the following discussion. We are
again assuming here that we already know a good estimate of the extreme parameters
a, d and that we start with an interval [bc] sufficiently wide to contain the
eigenvalues X, X+ , and X-. Then after a number of steps of the iteration
described in section 5 the approximate eigenvectors will give an accurate
representation of the eigenspace corresponding to the eigenvalues contained in the
interval [b,c]. Hence a projection process onto the subspace spanned by a small
number of successive approximate eigenvectors will provide good approximations to

39
the eigenvalues X, X- and X+. Also the Ritz eigenvector will be a much better
approximation than the current approximation. Practically we will orthonormalize
the m latest approximations into the N x m orthonormal system Q. We then compute
the Ritz matrix QT A Q and its eigenvalues by e.g. the QR algorithm and compare
the Ritz eigenvalues obtained with those of the previous projection. As soon as- +
an eigenvalue which corresponds to either X, I , or X starts converging, we
replace p, b or c by that eigenvalue. When the three of the eigenvalues have
converged, we replace the approximate eigenvector by the Ritz vector z = Q s,
where s is the eigenvector of QT A Q associated with X. This process is tested in
an experiment in section 7.
6.2. Using high degree polynomials
One might ask whether it is possible to use high degree polynomials in
practice. Our experience is that despite the fact that we often encounter
underflow situations with high degree polynomials, if these underflows are handled
simply by replacing the underflowing numbers by zeroes, it is always better to use
a high degree polynomial than a low degree polynomial. This fact will be
illustrated in an experiment in the next section. Polynomials of degree as high
as 200 or 300 are quite useful for badly conditioned problems. We open a
parenthesis here to point out the following interesting observation. It has been
observed during the numerical experiments that the laLt coefficients 6(n)i " 7i
become tiny as J and n increase. This is the cause of the underflowing conditions
mentioned above. The practical consequences of this observation is that after a
certain number of steps we do not need to save those tiny elements. For high
degree polynomials this will result in a nonnegligible cut off in memory needs.
In fact a more important observation is that the coefficients % and Pn are
cyclically converging more precisely it seems that a3k+j is a converging sequence
for fixed J. The same phenomenon is true for the O's. A proof of this phenomenon
40
is not available however. As a consequence there is a hope that after a certain
step we can simply use the previous a's and P's thus avoiding further calculations
of these cofficients.
I
I " " ..........." '. ...-......-....-......" .............. .......' I I | l 1 ......I :

41
7. Numerical exerimeants
In this section we will describe a few numerical experiments and give some
more details on the pactical use of the Generalized Chebyshev Iteration. All the
experiments have been performed on a DEC 20, using double precision (unit roundoff
of order 10 - 1 7). Any mention to the Generalized Chebyshev iteration refers to
algortiha 3 rather than algorithm 4.
7.1. Comparison with 8730L
The SYNNLQ algorithm described in (8] and the various versions of it such as
MINRES [8] SYJOIK [21 all based on the Lanozos algorithm, are very probably the
best known iterative methods for solving large indefinite systems at the present
time so it is important to compare the performances of our algorithm with this
class of methods. We will mainly consider SYIMOK although some of the other
versions are slightly faster (but also slightly less stable). Although it is
difficult to make any definitive conclusion we will see that there are instances
where the Generalized Chebyshev iteration has a better performance than SYMLQ.
Table I shows the work per iteration and the storage requirements of both
algorithms when the number of nonzero elements in the matrix A is equal to NZ (We
have not counted the storage required for the matrix A). An obvious advantage of
the Generalized Chebyshev iteration is its low storage requirement. Note that with
algorithm 4 GCI would require 2N+NZ operations instead of 3N+4Z.
I Add/Mult-s I Storage I
I SXMLQ I 9N+N I 6N I
GCI I + I 4N-- -I -s +
Let us discuss the above table uder the assuptiom that NZ - S N, which

42
would correspond for example to applying the inverse iteration method to compute
an eigenvector of a Laplace operator. Then it is easily seen that our algorithm
becomes competitive if the number steps for GCI does not exceed 1.75 times the
number of steps required by SYO/IL. It is observed in practice that this ratio is
seldom reached. In fact as the next experiment will show, when the problem is well
conditioned i.e. when both b and c are not too small relative to a and d. then the
number of steps is not too different for the two algorithms. For the first
experiment we have chosen a diagonal matrix diag(X) where the eigenvalues Xi are
distributed uniformely in each interval [aob] and [c,d]. We have taken N-20,
a-2.0o. b=-0.5, c-0.5 and d-6.0. The eigenvalues )I are defined by:
define i, - r N(b-a)/(b-a + d-)1
for 1-1.2-.1: )i M a + (1-1).h 1 , with hi=(b-a)/(il-1) (7.1)
for i-i +l,...N: X c € + (i-1).h 2, with h2 -(d-c)/(N-i 1) (7.2)
TThe right hand side f has been taken equal to f A A e, where e -(ll,.l...I).
The initial vector was a random vector, the same for both SYI(LQ and GCI. The
Generalized Chebyshev iteration using the exact parameters a,b,cd is run with a
residual polynoomial of degree 25. The residual norms are plotted in figure 7-1
in logarithmic scale.This is done every 5 steps for a total of 75 steps. Observe
that the behaviors of both algorithms are almost identical.
This example shows the following interesting property: when the origin is
well separated from the spectrum the C-G like methods will converge with about the
same speed, but each step is more expensive as shown in table 1.
The next test compares the two algorithms in presence of a mildly badly
conditioned problem. We have taken the same example as above but the values of b
and c have been changed into -0.05 and 0.05 respectively, and N has been increased

43
GCI RND SYMMLQ2.000r i '
z 0.000- .c-
-2.000
*C)- "2C
tM
-,.0 z ,0.00 20.00 40.00 60.00 80.00
NUMBER OF STEPS
I SYMMLQ2 GCI
Figze 7-I: Comparison of SYIO.Q and GCI. H - 200, a-2.0,b--0.5,c-0.5,d6.0
44
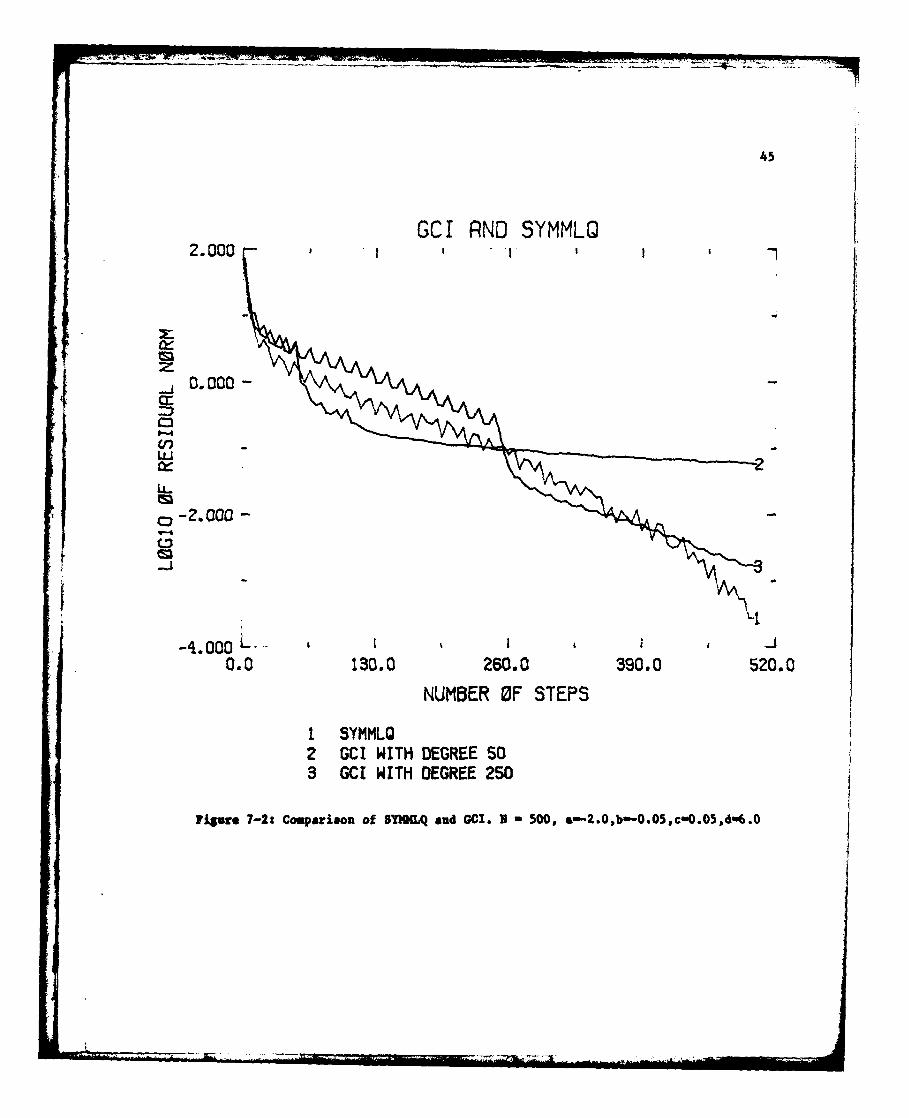
to 500. The sigenvalues Xi are defined again by 7.1 and 7.2. This is more
difficult to solve than our previous example. We have plotted in fig.7-2 the
logarithms of the residual norms for a total number of steps of 500. The inner
loop of GCI uses a polynomial of degree 250. (therefore 2 outer iterations were
taken.) The initial vector has been chosen randomly and has an initial residual
norm of.719 E+02. Although SYNNLQ requires loes steps here to achieve a reduction
of the residual norm by an order of 1.E-06, observe that in the beginning the GCI
has a better performance than ST10N". But as the number of steps approaches the
dimension N of A, we observe a speeding up of SYJ10LQ. Note that in exact
arithmectic SDIMLQ would have converged exactly at the 500-th steps. As a
comparison we plotted on the same figure the residual norms obtained with GCI
using a low degree polynomial. Observe the slowing down of GCI after 130 steps due
to the fact that the residuals start being in the direction of some eigenvectors.
This shows the superiority of using a higher degree polynomial when possible.
In the above experiments we have assumed that the optimal parameters a,b,c.d
are available. This is unrealistic in practice unless another linear system has
already been solved with the same matrix A. We would like next to show the
effectiveness of the projection procedure described in section 6. In the same
example of dimension 500 as above we have taken as extremal parameters the exact
values a and d. The interior parameters b and o were initially set to -0.15 and
0.15 respectively, instead of -0.05 and 0.05. We iterated with a polynomial of
degree 50. After each (outer ) iteration a Rayleigh Ritz step using the 10 latest
vectors uI as suggested in section 6 was taken. The convergence of the Ritz
eigenvalues is very slow in this example because the relative gap between the
sigenvalues of A is quite small. At the 9-th iteration no Ritz value has
converged to the demanded accuracy 10 - and it was decided to take a projection
step anyway with those sigenelements which have converged to a relative accuracy
of 0.2. The code then Save as eigeuvalues X--0.0504... and Xt+0.0507 and the
GCI RND SYMMLQ2.000
z
_j .000--D
0-4(nA
I I0.w3. 6. 9. 2.
NUBR FSTP1. SML
0i..072 oprsno YOL 130. 2G. 00 39-.Obn0.03,c520,m. .0

46
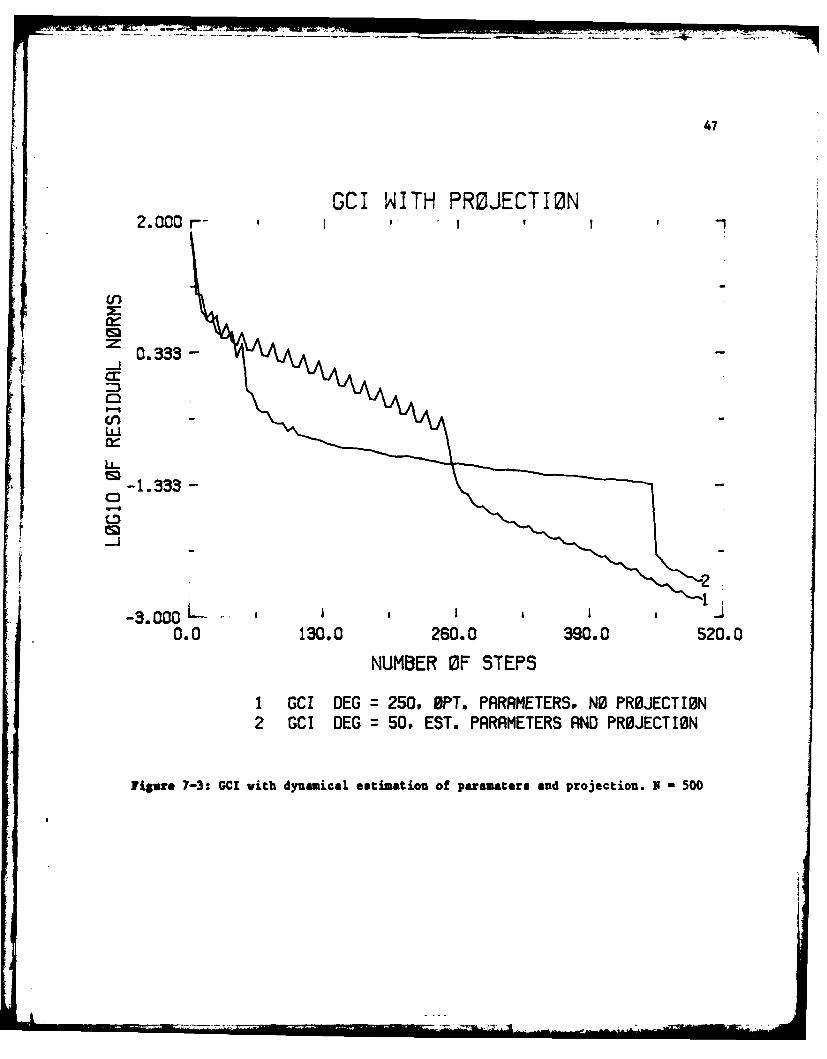
final (10-th) iteration was pursued with these values for b and c. Figure 7-3 is a
plot of the residual norms obtained with this technique together with those
previously obtained by using the exact parameters with a residual polynomial of
degree 250. It is remarkable that the final results are not too far from those
using the optimal parameters.
7.2. Computing interior eigenelements.
Consider the following N x N five-point discretization matrix
B -I 4 -11-I . 1-1 4 .
A I . . . withBi . . .
I .. 1- ... -1
-I B -1 4
and din(A) 150, dim(B) = 10
By Gershgorin's theorem all the eigenvalues of A lie in the interval [0,8].
Suppose that we would like to compute the eigenvalue nearest to the value 2.5 and
its corresponding eigenvector. Assuming that we do not have at our disposal any
estimate of the eigenvalues nearest to 2.5, we start the iteration described in
section 5 with p equal precisely to 2.5. Also as the first estimates of the
eigenvalues X + and ).-, the smallest eigenvalue at the right of I and the largest
eigenvalue at the left of X respectively, we take 3.0 and 2.0. The initial vector
v is generated randomly. After each outer iteration using a polynomial of degree
40 a projection step using the Iast 1U vectors is taken. The Ritz eigenvalues
are computed and compared with those obtained at the previous projection step as
described in section 6. When either of the oigenvalues corresponding to X+, X. or
X- has conversed to a relative accuracy of 10-3 then b, p, or c is replaced
accordingly. when the three olenvalues have converged the approximate
47
GCI WITH PROJECTION2.000-
O. 333-cc:
0-4Ln
u-
-1.333 -
-3.000 L0.0 130.0 260.0 390.0 520.0
NUMBER OF STEPS
1 GCI DEG = 250. OPT. PARAMETERS. NO PRBJECTION2 GCI DEG = 50. EST. PARAMETERS AND PROJECTION
Fiure 7-3: GCI with dynamical estimation of parameters and projection. N - 500

,. '. .' g ~ 7m - ,ai --- -.
48
eigenvector is replaced by the Ritz vector. Figure 7-4 shows 480 steps of such a
process (curve 1). Note the dramatic drop of the residual norm after the
projection process. Clearly such an improvement is not only due to the fact that
we now use better parameters b and c, but also to the fact that the current
approximate eigenvector is now purified from the components in the directions of
the undesired eigenvectors.
As a comparison the residual norms are plotted for the case where the exact
parameters 1- 2.436872, IL - 2.471196, and + 2.604246 are used. In this case
we iterated with a polynomial of degree 100 (Iteration with a polynomial of degree
40 gave much slower convergence) . Note that the process with orthogonal
projection is quite successful here since it does a better job than the algorithm
using the optimal parameters and a reasonably high degree polynomial.
8. Conclusion.
The numerical experiments suggest that the use of orthogonal polynomials for
solving indefinite linear systems as described in this paper can be effective
especially if one or more of the following conditions are met:
- The system to solve is not too badly conditioned.
- A moderate accuracy is required
- The operations y - A x are very cheap
- Several systems with the same matrix A are to solved. In that case theparameters are estimated only once .
The Generalized Chebyshev Iteration is a stable process and relatively high
degree polynomials can be used without difficulty to achieve a better performance.
In order to estimate the optimal parameters we resort to a projection procedure
which incidentally can also be used to improve the current approximate solution by
removing the undesired components.

49
INTERIOR EIGENELEMENTS BY GCI-'t " 'r 't,.
1.OE+O0
1. OE-01cr -CE
M 1.OE-O2c-
cm I.OE-03
_ I.OE-04i
CD -
1.OE-05 . ,
O.C 125.0 250.0 375.0 500.0
NUMBER OF STEPS
1 WrTH ESTIMRTISM OF PRRAMETERS AND PROJECTION2 WITH EXACT PARAMATERS AND NO PRSJECTIBN
118.1 7-4: Cospstia8 an interior siseapair with OC. N-150. . - 2.47119...

so
Several problems both theoretical and practical remain to be solved and more
numerical experience is needed before this class of techniques will become
reliable.
It is also hoped that besides their use in Numerical Linear Algebra, the
polynomials introduced in this paper will find applications in other fields of
numerical analysis such as in approximation of functions.
Acknowledsements. Most of the ideas of this paper were developed during a
visit at the University of California at Berkeley. I would like to express my
gratitude to Prof. B.N. Parlett for his hospitality at Berkeley and for valuable
comments about this work. I also benefited from helpful discussions with Stan
Eisenstat.
51
RitIKCIS
[1] R.S. Anderson G.H. Golub. Richardson's non stationary matrix iterativeprocedure. Technical Report STAN-CS-72-304, Stanford University, 1972.
[2] R. Chandra. Coniuxate Gradient Methods for Partial Differential Equations.Technical Report 129, Yale University, 1981. PhD Thesis.
[31 C.C. Cheney. Introduction to Annroximation Theory. Mc Graw Hill, N.Y.,1966.
[4] C. de Boor , J.R. Rice. Extremal Polynomials vith applications to Richardsoniteration for indefinite systems. Technical Report 2107, M.R.C., 1980.
[51 G.N. Golub , R.S. Varga. Chebyshev semi iterative methods successiveoverrelaxation iterative methods and second order Richardson iterativemethods. Numer. Hat 3:147-168, 1961.
[6] V.I. Lebedev. Iterative methods for solving operator equations vith aspectrum contained in several intervals. USSR Como Math Math Phvs9(6):17-24, 1969.
[7] D. A. O'Leary. Hybrid Coniugate Gradient alaorithms. Computer Science Dpt.Stanford University, Stanford, CA, 1976. PhD dissertation.
[81 C.C. Paige and M.A. Saunders. Solution of sparse indefinite systems oflinear equations . SIAN j. _9o NL Ir. Anal. 12:617-624, 1975.
[9] B.N. Parlett. The Imsetric Eigenalue Problem. Prentice Hall, EnglevoodCliffs, 1980.
[10] R. R. Roloff. Iterative solution of matrix equations for symmetric matricespossessina positive and negative eivenvalues. Technical Report UIUCDCSR-79-1018, University of Illinois, 1979.
[111 Y. Saad , A. Sameh. A parallel Block Stiefel method for solving positivedefinite systems. In M.H. Schultz, Editor, Proceedings of the EllipticProblem Solver Conference, Academic Press, 1980, pp. 405-412.

IA