A TUTORIAL INTRODUCTION TO NONLINEAR DYNAMICS AND CHAOS...
17
A TUTORIAL INTRODUCTION TO NONLINEAR DYNAMICS AND CHAOS, PART 11: MODELlNG AND CONTROL Luis Antonio Aguirre Centro de Pesquisa e Desenvolvimento em Engenharia Elétrica Universidade Federal de Minas Gerais Av. Antônio Carlos 6627 :31270-901 Belo Horizonte, M.G., Brazil Fax: El.5 31 499-5480, Phone: 55 :31 499-548:3 E-mail: aguirre(Q.icpc1ee.ufmg.br ABSTRACT - This is the second and final parI. of a series of two papers on nonlinear dynamics and chaos. In the first parI some tools. developed for analysing nonlinear systems, were c!esniiJec! in conjunction with a seI. of moc!els commonly llsed as benchmarks in the literature. This papel' investigates a llllIllber of isslles concerning the modeling, signal processillg anel control of nonlinear e1ynamics. This is carrieel ou! llsillg tbe tools and 1D0elels described in the first papel'. This inwstigation has th1'Own some new light on relevant p1'Oblems such as mo deI parametrization, mo deI validation. data smoothing anel control of nonliear systems. These issues are inwstigated using NARMAX polynomial mo deIs but it is believed that the conclusions are relevant to nonlinear represelltaJiolls in general. Some numerical examples are includecl. 1 INTRODUCTION Chaotic systems have attractec! a great deal of attention in the last three decades. Systems and mo deIs which undergo chaotic regimes for a rather wide range of operating condi- tions have been found in virtually every branch of science and engineering. In the evolution of the study of chaotic systems, several distinct but sometimes co-existent phases can be distin- guished. In the first phase, chaos was recognised as a de- terministic dynamical regime which could be responsible for f!uctuations that hitherto had been regarded as noise and therefore modeled as stochastic processes (Lorenz, 1963). oArtigo submetido em 04/07/95; Revisão em 27/11/95 Aceito por recomendação do Ed. Consultor Prof.Dr. Liu Hsu In a subsequent phase, it was necessary both to develop cri teria to detect chaotic dynamics and to establish C!y- namical invariants to quantify chaos (Guckenheimer, 1982; Eckmann and Ruelle, 1985; Denton and Diamond, 1991). Having succeeded in diagnosing chaos, the next step was to build mo deIs which would learn the dynamics f1'Om data on the strange attractor. In this respect a number of model structures have been investigated such as local linear mappings (Farmer and Sidorowich, 1987; Crutchfield and McNamara, 1987), radial basis functions (B1'Oomhead and Lowe, 1988; Casdagli, 1989), neural networks (EIsner, 1992) and global nonlinear polynomials (Aguirre and Billings, 199.5c; Kadtke et alii, 1993). This phase is being currently investigated with other equa.lly important issues concerning nonlinear dynamics such as noise reduction and control. It is the objective of this papel' to p1'Ovide a brief int1'Oduction to these issues. The outline of the papel' is as follows. Section 2 discusses a numbel' of issues concerning the modeling of nonlinea dy- namics. Embedding techniques in general and NARMAX mo deIs in particular are brief!y presented in that section. Section 3 is concerned with the noise reduction problem, which is a major limitation in the modeling of nonlinear dynamics. Section 4 provides a very superficial int1'Oduc- tion to the subject of control and synchronization of chaos, nonetheless several references are p1'Ovided for further read- ing. Some final remarks are made in section 5. 2 MODELlNG NONLlNEAR DYNAMICS This section gives a quick view at nonlinear dynamics 1D0d- eling. This vital issue is discussed under several related headings. A helpful account of some of the main points on 50 SBA Controle & Automação jVol.7 no. IjJan., Fev., Mar. e Abril 1996
Transcript of A TUTORIAL INTRODUCTION TO NONLINEAR DYNAMICS AND CHAOS...

A TUTORIAL INTRODUCTION TO NONLINEAR DYNAMICS AND CHAOS,PART 11: MODELlNG AND CONTROL
Luis Antonio AguirreCentro de Pesquisa e Desenvolvimento em Engenharia Elétrica
Universidade Federal de Minas GeraisAv. Antônio Carlos 6627
:31270-901 Belo Horizonte, M.G., BrazilFax: El.5 31 499-5480, Phone: 55 :31 499-548:3
E-mail: aguirre(Q.icpc1ee.ufmg.br
ABSTRACT - This is the second and final parI. of aseries of two papers on nonlinear dynamics and chaos. Inthe first parI some tools. developed for analysing nonlinearsystems, were c!esniiJec! in conjunction with a seI. of moc!elscommonly llsed as benchmarks in the literature. This papel'investigates a llllIllber of isslles concerning the modeling,signal processillg anel control of nonlinear e1ynamics. Thisis carrieel ou! llsillg tbe tools and 1D0elels described in thefirst papel'. This inwstigation has th1'Own some new lighton relevant p1'Oblems such as modeI parametrization, modeIvalidation. data smoothing anel control of nonliear systems.These issues are inwstigated using NARMAX polynomialmodeIs but it is believed that the conclusions are relevantto nonlinear represelltaJiolls in general. Some numericalexamples are includecl.
1 INTRODUCTION
Chaotic systems have attractec! a great deal of attention inthe last three decades. Systems and modeIs which undergochaotic regimes for a rather wide range of operating conditions have been found in virtually every branch of scienceand engineering.
In the evolution of the study of chaotic systems, severaldistinct but sometimes co-existent phases can be distinguished. In the first phase, chaos was recognised as a deterministic dynamical regime which could be responsible forf!uctuations that hitherto had been regarded as noise andtherefore modeled as stochastic processes (Lorenz, 1963).
oArtigo submetido em 04/07/95;Revisão em 27/11/95Aceito por recomendação do Ed. Consultor Prof.Dr. Liu Hsu
In a subsequent phase, it was necessary both to developcriteria to detect chaotic dynamics and to establish C!ynamical invariants to quantify chaos (Guckenheimer, 1982;Eckmann and Ruelle, 1985; Denton and Diamond, 1991).Having succeeded in diagnosing chaos, the next step was tobuild modeIs which would learn the dynamics f1'Om dataon the strange attractor. In this respect a number ofmodel structures have been investigated such as local linearmappings (Farmer and Sidorowich, 1987; Crutchfield andMcNamara, 1987), radial basis functions (B1'Oomhead andLowe, 1988; Casdagli, 1989), neural networks (EIsner, 1992)and global nonlinear polynomials (Aguirre and Billings,199.5c; Kadtke et alii, 1993). This phase is being currentlyinvestigated with other equa.lly important issues concerningnonlinear dynamics such as noise reduction and control. Itis the objective of this papel' to p1'Ovide a brief int1'Oductionto these issues.
The outline of the papel' is as follows. Section 2 discusses anumbel' of issues concerning the modeling of nonlinea dynamics. Embedding techniques in general and NARMAXmodeIs in particular are brief!y presented in that section.Section 3 is concerned with the noise reduction problem,which is a major limitation in the modeling of nonlineardynamics. Section 4 provides a very superficial int1'Oduction to the subject of control and synchronization of chaos,nonetheless several references are p1'Ovided for further reading. Some final remarks are made in section 5.
2 MODELlNG NONLlNEAR DYNAMICS
This section gives a quick view at nonlinear dynamics 1D0deling. This vital issue is discussed under several relatedheadings. A helpful account of some of the main points on
50 SBA Controle & Automação jVol.7 no. IjJan., Fev., Mar. e Abril 1996

y(t) E IRn
y'L\/\fÇJ1to
which operates on the entire state OI' phase space but whichyields just a scala.r which is caIled the measured variable.The question which naturaIIy arises at this stage is the following: given .f : IR" --;. IR" and h(y) : IR" ~ IR, is itpossible to reconstruct a trajectory OI' sulution of .f fromthe scalar measurement h( y)?
Y3
Yl
Figure 1 - The n time series defined by the state variablesof an ntn-order dynamical system can be used to composethe trajeetory in state space.
Fortunately, it turns out that this question has an a:ffirmative answer if certain requirements are met (Takens, 1980;Packard et alii, 1980; Sauer et alii, 1991). Thus embedology is concerned with how to reconstruet the phase spaceof a dynamical system of order n from a limited set of measurements q where q < n, and more often than not q = 1.In other words, the objective is to reconstruct the phasespace of a system from a single time series. The resultingphase space is usuaIIy referred to as embedded phase space,embedding space or just em.bedding.
Another question which should be addressed is: why shouldwe be concerned in reconstrueting the trajectories of a dynamical system? In the companion papel' it was shownthat in state (01' phase) space the steady state dynamics ofa system are represented by geometrical figures which arecaIIed attractors. A stable autonomous linear system onlyhas one kind of attractor, a point attraetor. However, nonlinear systems may have more complicated a.ttractors suchas limit cycles, tori and the so-caIIed strange attraetors.
Y2
y(to)
this subject can be found in the literature (Casdagli et alii,1992).
2.1 Embedding Techniques
An n th-order dynamical system iJ = f(y) can be represented as a set of n first-order ordinary differential equations each one governed by a state variable. The global system would therefore have n time variahles {Yl, Y2, ... , y,,}and the solution of such a system could be thought of as 11
time series.
In a sense, the n time series mentioned above are obtainedfrom the original n th-order system by decomposition. AIso,given th 11 times series it is possible to recover the originaln-dimensional solution by taking each state variable to bea coordinate of a 'reconstruction space' and to representeach time series in such a space. Thus n time series canbe used to compose ar reconstruct the system solution OI'
trajectory. This is iIIustrated in figure 1.
A di:fficulty encountered in praetice with this approach isthat the order of the system n is seidom known and evenwhen an accurate estimate of this variable exists the numbel' of measurements wiII not be as large as n. Take forinstance the atmosphere which is usuaIIy thought of asa high-order system, nonetheless monitoring and weatherforecasting stations only measure a very limited numbel' ofvariables of this system in order to make predictions.
Therefore if time series are used to reconstruct the phasespace of dynamicaI systems via embedding techniques, it ispossible to use results from differentiaI geometry and topology to analyse the resulting attractors which are geometrical objeets in the reconstructed space. Moreover, if theembedding is successful, both the reconstructed and theoriginal attraetors are equivalent from a topological pointof view, OI' in other words, they are said to be diffeomorphic.
The practical consequences of this are obvious. No matterhow complex a dynamical system might be, even if only onevariahle of such a system is measured, it is possible to reconstruct the originaI phase space via embedding techniques.It is also possible to estimate qalitative and quantitativeinvariants of the original attraetor, such as Poincaré maps,fractal dimension and Lyapunov exponents, directly fromthe reconstructed attractor which is topologically equivalent to the originaI one. These ideas are iIIustrated in figure2.
A convenient but by no means unique way of reconstructingphase spaces from scalar measurements is achieved by using delay coordinates (Packard et alii, 1980; Takens, 1980;Sauer et alii, 1991). Other coordinates include the singularvalue (Broomhead and King, 1986; Albano et alii, 1988)and derivatives (Baake et alii, 1992; Gouesbet and Maquet, 1992). A framework for the comparison of several reconstructions has been developed in (Casdagli et alii, 1991)and three of the most conU11on methods have been studiedin (Gibson ei alii, 1992).
A delay veetor has the folIowing form
This can be described in a more mathematical way by considering the aetion of a measuring function h(y) : IR" --;. IR
SBA Controle &. Automação /Vol.7 no. I/Jan., Fev., Mar. e Abril 1996 51

(De) Composition
)
Figure 2 - In many practical situations the number of measured variables is limited. Embedding techniques enablethe reconstruction of the state space even from a singlemeasurement. The reconstructed (OI' embedded) and theoriginal state spaces are equivaIent.
window defined as (de - l)T (Albano et alú, 1988; Buzugand Pfister, 1992; Martinerie et alii, 1992). Some of thesemethods have recently been compareel in (Rosenstein et alii,1994). There is some evielence that the 'optimum' vaIueof T in system ielentification problems is shorter than forphas-space reconstructions (Aguirre, 1994). Dynamical reconstructions frol11 nonuniformly sampleel data has beenaelelressed in (Breeelon and Packarel, 1992) and phase spacereconstruction of symmetric a.ttractors has been consielereelin (King anel Stewart, 1992).
Taken 's theorem gives sufficient conelitions for equation (2to holel, that is, in order to be able to infer elynamical invariants of the original system from the time series of asingle variable, however no indication is given as to how toestimate the map fT' A number of papers have been devoteel to this goal and snch methoels cano be separated intotwo major groups, namely local anel global a.pproximationtechniqnes.
The local approaches usually begin by partitioning the embedeling space into neighbourhoods {U;}~\ within whichthe elynamics can be appropriately elescribed by a linearmap gT : IR~ -+ IR such that
y(k + T) ~ gT;(y(k)) for y(k) E Ui, i = 1, ... , Nn . (3)
y(k) = [y(k) y(k - T) ... y(k - (de - I)TW, (1)
where de is the embedding dimension and T is the delaytime. Clearly, y( k) can be represented as a point in thede-dimensionaI embedding space. Takens (1980) has shownthat embeddings with de > 2n will be faithful genericallyso that there is a smooth map h : IRde -+ IR such that
for ali integers k, and where the forecasting time T and T
are also assumed to be integers. A consequence of Taken'stheorem is that the attractor reconstructed in IR~ is diffeomorphic to the original attractor in state space and therefore the fonner retains dynamical and topological characteristics of the latter.
In the case of delay reconstructions, the choice of the reconstruction parameters, that is, the embedding dimensionde and the delay time T is of the greatest importance sincesuch parameters strongly affect the quality of the embedded space. The selection of de has been investigated in(Cenys and Pyragas, 1988; Aleksié, 1991; Cheng and Tang,1992; Kennel et alii, 1992). The choice of the delay timehas been discussed in (Albano et alii, 1991; Buzug et alii,1990; Fraser, 1989; Kember and Fowler, 1993; Liebert andSchuster, 1989; Billings and Aguirre, 1995; Aguirre, 1995a).Many authors have suggested that in some applications itis more meaningful to estimate these parameters simultaneously, this is tantamount to estimating the embedding
Several choices for gT have been suggesteel in the literature such as linear polynomiaIs (Farmer anel Sielorowich,1987; Casdagli, 1991) which can be interpolateel to obtainan approximation of the map h (Abarbanel et alii, 1990).Simpler choices incluele zeroth-order approximations, aIsoknown as local constant predictors (Farmer and Sielorowich,19B7; Kennel anel Isabelle, 1992; Wayland et alii, 1993) anela weighted predictor (Linsay, 1991).
One of the most popular representations of dynamical modeIs is the polynomial formo Apart from being easy to interpret, simulate and operate, algorithms for the estimation ofthe parameters of polynomial models are currently widelyavailable. One of the disadvantages of global polynomials,however, is that even for polynomial models of moderate
2.2 Representation of Nonlinear Systems
The Volterra series anel other related functional representations were among the first modeIs to be useel in nonlinearapproximation. A well known elifficulty with such representations is the enormous amount of parameters requireel inorder to approximate simpIe nonlinearities (Billings, 1980).Related techniques seem to suffer from the same problemand, in addition, tend to require very large data sets (Gionaet alii, 1991).
Global a.pproximators overcome some of the elifficultiesfaced by local maps. Although global moelels have problems of their own, some attention has been elevoted to theinvestigation of such models (Cremers anel Hübler, 1987;Crutchfield anel McNamara, 1987; Kaeltke et alii, 1993;Aguirre and Billings, 1995e).
(2)y(k + T) = h(y(h~))
52 SBA Controle & Automação jVol.7 no. 1jJan., Fev., Mar. e Abril 1996

oreler, the number of terms can become impractically large(Farmer anel Sielorowich, 198830; Caselagli, 1989). Usingpolynomials to forecast chaotic time series, Caselagli (1989)has reporteel that such preelictors blow up in the iterativeproceelure anel suggests that this is because polynomial preelictors give bael approximants to the true elynamics exceptvery elose to the attractor. On the other hanel, some ofthe problems relateel to global polynomials are believeelto be connecteel to the structure of the moelels (Aguirreanel Billings, 1995b) anel promising results have been reporteel for some systems using nonlinear global polynomialswith simplifieel structure (Kaeltke ei aliz, 1993; Aguirre anelBillings, 1994c).
Rational moelels share with polynomials the advantage ofbeing linear in the parameters. This feature males it possible to use well known anel numerically robust algorithmsto estimate the parameters of such models. Moreover, 1'30tional moelels seem to extrapolate better than polynomials(Farmer and Sidorowich, 198830).
The radial basis funetion (RBF) approach is a global interpolation technique with good localization properties anel itis easy to implement as the algorithm is essentially inelepenelent of the elimension (Broomheael and Lowe, 1988; Caselagli, 1989; Whaha, 1992). However performance of raelialbasis functions depeneis critically upon the centres (Chen eialii, 1990). For a few hunelreel elata points the choice of thecentres is a elifficult task and the solution of the problemcould become infeasible (Casdagli, 1989; Billings anel Chen,1992).
a.pproximation depeneis on the choice of several operatingregimes where the system dynamics are approximately linear. This information has to be available a priori anel issomewhat criticaI. The problem of selecting the operating points is similar to the choice of neighborhooels anel ofcentres in other approaches.
Other representations for modelling nonlinear systems inelude Legenelre polynomials (Cremers anel Hübler, 1987),neural networks (EIsner, 1992; Principe ei alii, 1992) andweighteelmaps (Stokbro anel Umberger. 1992).
At present no particular representation can be regareleel asthe best for any application anel "fineling a good representation is largely a matter of trial anel error" (Farmer anelSielorowich, 198830). On the other hanel, it seems that globalpolynomial models are in many respects simpler and therefore more convenient (Kadtke ei alii, 1993).
The remainder of this section investigates the use of globalpolynomials with simplifieel structure to estimate elynamical invariants of strange attractors.
2.3 NARMAX Models
Consider the nonlinear -ªutoregressive moving -ªveragemodel with e2:;ogenous inputs (NARMAX) (Leontaritis anelBillings, 198530; Leontaritis anel Billings, 1985b)
where n y , 71" anel n e are the maxÍlnUll1 lags consielereel forthe output, input and noise terms, respectively anel d is theelelay measured in sampling intervals, Ts . Moreover, u(k)and y(k) are respectively input and output time series obtained by sampling the continuous data ll(k) anel y(ld atTs . Furthermore, e( k) accounts for uncertainties, possiblenoise, unmodelleel dynamics, etc. anel p([.] is some nonlinear function ofy(k), 1l.(k) anel e(k) with nonlinearity degreef.E Z+. In this papel', the map F([.] is taken to be a polynomial of elegreee. In oreler to estimate the parameters ofthis map, equation (4) has to be expresseel in preelictionerrar form as
y(k) = wT(k - 1)<3 + ç(k)
Local approximants are concerned with the mapping of aset of neighbouring points in a reconstructed state spaceinto their future values. A major problem here is to select the neighbourhooels because such a choice is criticaIanel there coulel be hundreels OI' even thousands of these(Farmer anel Sielorowich, 1988ab). The size of the neighbourhooels elepenels on the noise leveI and the complexityof the dynamics (Farmer anel Sielorowich, 1991).
A simpIe alternative to nonlinear modeling is the use ofpiecewise-linear representations (Billings anel Voon, 1987).The eliscontinuities among the several linear modeIs whichcompose a piecewise-linear moelel, can provide effects similar to those observeel in nonlinear modeIs such as elmos(Mahfouz and Badrakhan, 199030; MahfollZ and Baelrakhan,1990b ). However, as other local representations, the final model is piecewise-linear and therefore eliscontinuous.Piecewise-linear moelels have been founel to be unreliahle indicators of the underlying dynamics in some cases (Billingsand Voon, 1987), anel a possible explanation for this is thatsuch modeIs violate the physically motivated hypothesis ofsmooth elynamical systems (Crutchfield anel McNamara,1987). Thus local predictors may not always be suitablefor predicting invariant measures (Brown ei alii, 1991).
y(k) = F( [y(k - 1),
u(k - d),
e(k),
where
y(k - n y ),
u(k-d-n,,+l),
,e(k-ne )] , (4)
(5)
anel where w~" (k -1) is a matrix which contains linear anelnonlinear combinations of output anel input terms up to and
Smooth interpolation functions have been suggested as away of alleviating the problem causeel by eliscontinuities inpiecewise-linear moelels (Johansen anel Foss, 1993). Suchfunctions have localiseel properties which confer to the finalmoelels composeel in this way some similarities with raelialbasis functions. As woulel be expecteel, the quality of the
(6)
5BA Controle & Automação IVo!.? no. 1/Jan., Fev., Mar. e Abril 1996 53

including time k-l. The matrices \Ii;"ç(k:-l) and \Ii[(k-l)are defined similarly. The parameters corresponding to ~ach
term in such matrices are the elements of the vectors 8 y",
êy"ç anel ê ç, respectively. Fina11y, é,( k:) are the residuaIswhich are defined as the difference between the measureeldata y(k) and the one-step-ahead prediction \liT(k - 1)8.The parameter vector 8 can be estimated by minimizingthe fo11owing cost function (Chen ci alú, 1989).
(7)
where II . II is the Euclidean norm. Moreover, leastsquares minimization is performed using orthogonal techniques in order to effectively overcome two major elifficulties in nonlinear model identification, namely i) numerical i11-conditioning and ii) structure selection. In orderto circumvent such problems orthogonal techniques maybe used (Bi11ings ei alá, 1988; Korenberg and Paarmann,1991).
2.4 Structure Selection
The number of terms in a polynomial grows very rapidlyeven for relativdy lo\\' values ofe, n y , n" and n e . This istoo difficult a problem to be solved by trial and error. However, effective anel elegant solutions to handle this problem are availahk. see (Bi11ings ci alá, 1988; Aguirre andBi11ings, 199!)d) anel the survey paper by Haber anel Unbehauen (Haber anel Unbehauen, 1990). One solution isthe crror ndl/clion ratio (ERR) test (Bi11ings ei alii, 1988;Bi11ings ei alii. H)S9: h:orenberg ei alii, 1988). Two advantages of this approach are i) it does not require the estimation of a complete model to determine the significance of acandidate term and its contribution to the output, and ii)the ERR test is eleriveel as a by-product of the orthogonalestimatioll algori t hm.
Because the final models will be composed of a reducednumber of terms. which is a sma11 fraction of the total number of candidate terms, the models in this paper can beviewed as 'simplified' or 'concise' global polynomials. It isbelieved that these moelels overcome some of the practica.ldifficulties usua11y reported for non-simplified polynomials.
In a recent paper it has been shown that the ERR criteriongives qua.litatively similar results as higher order spectrumtechniques in eletecting nonlinear interactions within theunder1ying dynamics (Aguirre and Bi11ings, 1994a). A criterion similar to ERR has been used to generate radial basisfunctions with a small number of parameters (Mees, 1993).Other techniques can be used in connection with ERR suchas the zeroing-and-refitting approach (Kadtke ct alii, 1993)and the concept of term clustering (Aguirre and Bi11ings,1995d).
In a multivariable modei with l' inputs and m outputs,the entries in equation (4) are vectors, that is tt(k) =[uttk) 'Ur(kW, y(k) = [ydk) ... Ym(kW and , e(k) =[e1 (k) em (k)]T, and both structure detection and pa-rameter estimation can be performed 111 a way which is
ana.logous to the monovariable case (Bi11ings cf ahi, 1989).
The quantity ERR provides an indication of which terms toinclude in the model. In other words, the ERR test providesa means of ordering all the candidate terms according to ahierarchy which depends on the l'elative importance of eachtermo It should be noted that no trial-and-error is necessaryfor this. However, the fo11owing question arises: how manyterms should be included in the model? A practica.l way ofaddressing this question is by means of informaiion criieriasuch as the final prediction error (FPE) (Akaike, 1974),Akaikc 's information criterion (AIC) (Akaike, 19(4), theBayes'ian infon11aiion criterion (ElC) (Kashyap, 1977), themodel eniropy (Crutchfield and McN amara, 1987) and theSchwar:: informaiion criierion (Mees, 199:3). See (Gooijerei alá, 198:3) for a survey of such techniques.
2.5 Model Validation
The last step in any identification problem is the validation of the estimated models which is not a trivial problem.Most 'conventional' approaches to modei validation are notparticularly attractive when the modeis are chaotic andtherefore alternative invariants should be used to quantifythe quality and adequacy of the estimated models. Whenva.lidating nonlinear models it is desirable that the criteria used should be sensitive to the 'fundamental' featuresof the models. In this respect it has been shown that bifurcation diagrams are far more sensitive to variations inmodel structure (Aguirre and Billings, 1994c) than manyother nonlineal' invariants used in model validation such asPoincaré maps (Casdagli, 1989; Gottwa.ld ei alii, 1992) correlation dimension (Grassberger ei alli, 1991), Lyapunovexponents (Abarbanel et alii, 1989; Principe ei alii, 1992),reconstructed phase-space plots (Adomaitis ei alli, 1990).Recently, the concept of synchl'onization, which is ratherwe11 known in the field of control of chaos, has been suggested as a nontrivia.l test for validating estimated modeis(Brown ei alli, 1994).
Finally, it should be pointed out that most of the resultsdescribed so far in this section have been obtained usingthe tools described in the first paper of the series. Many ofthe commonly used statistica.l toois are of very limited usein assessing dynamical properties of estimated models.
2.6 NARMAX and Other Approaches
Unlike many localized techniques, the NARMAX approachdoes not involve finding neighborhoods, thus Nn = 1 anda11 the data belong to a unique 'neighbourhood', that is,y(k) EU1 k =de, ... , N. This reduces the number of datarequired to estimate the dynamics. Moreover, the delaytime is taken to be equal to the sampling period, thus T =Ts .
There are a number of important differences between NARMAX polynomial identification and other methods. First, aNARMAX modei includes input terms. This enables fittingdata from non-autonomous systems and therefore estimating input/output maps, see (Casdagli, 1992; Hunter, 1992)for related ideas on this subject. An immediate consequence
54 SBA Controle & Automação IVo!.? no. l/Jan., Fev., Mar. e Abril 1996

of this is that for inputjoutput systems, it is not requiredthat the output be on any particular attractor. Once aninputjoutput modeI has been estimated, a particular inputcan be used to generate data on a specific attractor.
Another important difference is the presence of noise terms,that is, the moving average part of the model. It should benoted that equation (2) will only hold in the unlikely casewhen noise is ahsent. Any noise in the data OI' any imperfection in the estimate of the map h will result in anextra term in the right hand side of equation (2). Sucha term would be responsible for modelling the mismatchintroduced by the noise and unmodelled dynamics. It isa well known result in the theory of system identificationthat if such a term is omitted from the model structure, theestimat.e of the map IT will become biased during parameter estimation (Soderstrom and Stoica, 1989) and llonlinear models are no exception to this mIe (Billings and Voon,1984).
(a)
1.Sr--~--~--~-~--~----,
o.s
-o.s
-1
-':l.Ls--_~,---o~.-=-s --~o--~o.-=-s --~----",.s
x(k)
(b)
1.Sr--~--~--~-~--~----'
marked with circles
-':l'::-.s---~,---o-::'.-=-s---=-o---::'o.-=-s--c------:",.sx(k)
.-.- .....-,
-o.s
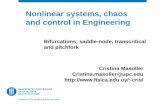
Figure :3 - First return map for (a) the Hénon map contaminated with noise. Only the encircled data were used inthe estimation, (b) the identified map of equation (8).
x(k) = 0.99433 - 1.3818 x(k - 1)2 + 0.29302 x( J..~ - 2) . (8)
o.s
Summarising, equation (5) is a hybrid modeI since it is composed of a deterministic part and a stochastic component.The latter is only used during parameter estimation in 01'
der to avoid bias on the formeI'. Therefore, in this papel'the modeIs used to generate the surrogate data are purelydeterministic a.!though the stochastic part of the modeIs isalso represented for clarity. Thus, the deterministic component of the identified modeIs is an approximation to thedynamics, that is, fT :::::: W;lI(J..~ - 1)Ê>y" where T=Ts ·
It seems that when the noise is white and enters the system as a purely additive component, the division of thedata into neighbourhoods and subsequent estimation reduces the bias. This will not be the case however if themodeI is global 01' if the noise is correlated. Thus in 01'
der to avoid bias a modeI for the noise and uncertainties,w;lIç(k - 1)0ylIç + wl(J..~ - 1)Ê>ç, is included in the modelstructure before proceeding to parameter estimation. Onceparameters have been estimated, only the deterministicpart of the model is used, namely W;lI (J..~ - 1)Ê>Yll' Thisprocedure can handle moderate amounts of white and correlated noise.
2.7 Modeling of Dynamical Systems
In this section some of examples are given to illustrate theperformance of NARMAX polynomia.!s in the moelelling ofnonliner systems. It is worth stressing that the stochasticcomponent of some modeIs is represented for greater claritysince such component is needeel eluring parameter estimation to avoid bias. However, only the deterministic part isaetually used to iterate the modeIs in arder to generate thefigures. The emphasis is on the reconstruction of dynamicalproperties.
The first return map for this equation is shown in figure 3band has a correlation dimension of De =1.11 ± 0.22 whichshows good agreement with the origina.! map for whichDe =1.21 ± 0.01. The correlation elimension estimated elirectly from 20000 data points with the same SNR as abovewas De = 1.76 ± 0.06 revealing that the estimated valueis quite sensitive to such leveIs of noise. Further improvement can be achieved by using more than 50 points, butthe objective in this example was to show that the mapcan be estimated fairly accurately from a short and noisytime series.
2.7.1 Poincaré Sections
The first return map for 1000 points taken from data obtained from the Hénon map (Hénon, 1976) is shown in figure3a. The following model was estimated from the 50 points
In the case of driven oscillators, the practica.! reconstructionof Poincaré sections is restricteel to controlled experimentsbecause of the large amount of data required since only onepoint in such sections is obtained for each forcing period.Moreover, sma.ll amounts of noise often blur the delicatefracta.! structure of the attractor anel the Poincaré sectionstend to become fuzzy.
SBA Controle & Automação jVol.? no. 1jJan., Fev., Mar. e Abril 1996 55

The fuzziness in the Poincaré sections introduced by thenoise is a direct consequence of superimposing a stochastic component on the top of a purely deterministic trajectory. The Poincaré sections reconstructed using NARXmodeIs do not suffer from such fuzziness because althoughthe stochastic component was present during the model estimation, the effects of such a component were 'absorbec!'by the moving average (MA) part of the moc!el enahlingunbiased estimation. The NARX part of the moc!el, whichis purely deterministic. will 110i inc!uce any fuzziness in thePoincaré sections. The fact that the moc!els are not perfect, however, will be revealed by possible distortions in theshape 01' the reconstructec! attractors.
(a)
0.5
ã: O~>;
-0.5
-1
-1.5
The following model was obtainec! from 1500 data pointson the Duffing-Holmes attractor shown in figure 4a
-1.5 -1 -0.5 Oy(t)
(b)
0.5 1.5
y(k) 0.84725 y(l.:-l) + 0.35713 y(I.:-3)
0.694:31 x 10-1 y( k _1)3 + 0.12780 x 10-1 y( k-4)
+ 0.61:319 x 10-1 tl( k-l) + 0.40:325 y( k - 2)
0.24:349 x 10-3y( k-1)y(I.:-2)y(k-5) - 0.46215 y(k-5)
+ 0.096:n9u(k-:3) - 0.15316 y(k-2)y(k-3)y(k-4)
0.7:3618 x 10-2y(k-l )2 y (k-5)
+ 0.0711:.'22 1/(/;-I)y(k-3)y(k-4)
+ IJiT(k - 1)Êle+~(k) . (9)
Figure 4 - Poincaré sections (a) obtained f1'Om a noisy 01'
bit of the Duffing-Holmes oscillator, (b) of the identifiedmoc!el ofequation (9). A=0.3 anel w=lrad/s,~) = 5.
An estimate of lhe original Poincaré section is shown in figure 4b which \"as obtained by iterating equation (9). Thisreconstruct.eel Poincaré section is very similar to the originalone.
2.7.2 Bifurcation Diagrams
-1.5
-1.5 -1 -0.5 Oy(k)
0.5 1.5
Using 1500 data poilllS generatec! by simulation of the modified van der Pol eqnat.ion (see first paper), with this SNR,sampled at T" =;r /SO. the foJlowing NARMAX model wasestimated
y( k) 0.8359~1 y( k -1) + 0.87488 x 10-1 y( k -4)
+ 0.68539 x 1O- 1 u(k-2) + 0.46776 x 10-2y(k_l)3
0.47330 y(k-6) + 0.12786 y(k-2)
+ 0.:37341 y( k - 3) - 0.22840 X 10-2u.( k -1)
+ 0.49.504 x 10-1 y(k-5) - 0.014841 y(k-l)2 y(k-2)
0.081389u.(k-3) + 0.038305 tl(k-5)
0.13.5.54 x 10-1 u( k -4) + 0.20404 x 10-2y(k - 2)2 y( k - 3)
0.34234 X 10-2y( k -1)y( k - 6)2
+ 0.35999 x 10-2y(k-2)y(k-4)y( k-6)
+ IJiT(1.: - I)Êle+~(k) . (lO)
This model also has a self-sustained oscillation with w =1.56rad/s.
Figure 5 shows that the ic!entified model (10) does reproduce the major bifurcation patterns of the original system.
See figure 14a of the first papel' in the series for the originalbifurcation diagramo This is usually more demanding than,for instance, requiring that a model should reproduce invariants associated with particular attractors (Aguirre andBillings, 1994c).
2.7.3 Original and Embedded Trajectories
This section reports some results Cüncerning the use ofNARMAX polynomials in rep1'Oducing embedded and original trajectories of strange attractors. To investigate thisthe well known Chua's double scroll attractor is used. Ifali variables are measureel, multivariable NARMAX modeIs can be fitted to the data and the iterated discrete-timeoutputs can be used to reconstruct the original attractorgeometry in state-space.
The data in figure 6a were used to identify the followingmultivariable model
56 SBA Controle 8< Automação jVol.7 no. ljJan., Fev., Mar. e Abril 1996

A
3,--------.----.--------.-----,.-------,
2
2
(a)
4
2
20N
-2
-40.5
O-0.5 -2 O
y(t) x(t)
(b)
4
2
goN
-2
-40.5
O-0.5 -2 O
y(k) x(k)
systems. This comprises one of the current phases in theinvestigation of chaos (Mitschke, 1990; Chennaoui et alii,1990; Schreiber and Grassberger, 1991; Broomhead et alii,1992; Davies, 1992; Grassberger et alii, 1993; Holzfuss andKadtke, 1993).
Figure 6 - (a) Noisy trajectory used for identification,SNR=72.9, 39.9 and75.5 dB for x, y and z components, respectively. (b) Double scroll Chua's attractor reconstructedfrom the identified modei in equation (11).
Some authors assume that some kind of a priori knowledge concerning the original system is available such as apiece of noise-free data (Marteau and Abarbanel, 1991),the structure of the maps describing the underlying dynamics (Davies, 1992), ar even the complete maps, thatis, structure and parameters are known (Hammel, 1990;Ozaki, 1993). However, a clear limitation in any real noisereduction problem is that the underlying dynamics are notusually known a priori and the map has to be estimated(learned) from the noisy data as an integral part of thenoise reduction processo Consequently, the noise will poselimitations on the amount of noise which can effectively beeliminated. In the field of nonlinear dynamics, the mainobjective of filtering a chaotic time series is to enable thereconstruction and estimation of dynamical invariants suchas Poincarê sections, Lyapunov exponents and fractal di111enSlOns.
0.11282 x 10x(k -1) + 0.55867 y(k - 1)
0.47190 X 10-1 :r( k - 1)3
0.39895 X 10-1 y( k - 1 )z( k - 1)2
0.31229 X 10-2;;( k - 1 )2. + 0.18363 x 10-1 z(k - 1)
'lilrçyç, (k - 1 )Ê>çrçyç, +~x( k)
0.91948y(k -1) - 0.10392x10-3 z(k _1)2'
0.70843 x 10-1 x( k - 1) + 0.67800 x 10-1;;( k - 1)
0.13424 X 10-2x( k - 1)3
0.44206 x 10-3 x(k - l/y(k - 1)
'liL M , (k - l)Ê>çrM' +~y(k)
:r(k)
+
+
y(k)
+
++
;;(k) 0.96628 z(k - 1) - 0.95854 y(k - 1)
0.36719 X 10-1 x( k - 1) - 0.55765 X 10-1 y(k - 1)3
+ 0.10333x10-2 x(k _1)3
+ 0.0020536 x(k-1)y(k-l)z(k-1)
+ 'lilrçyç, (k - l)Ê>çrçyç, +Uk) . (11)
Figure 5 - Bifurcation diagram of the identified model ofequation (10). w=4rad/s.
_4'------'--.----~-----"----L-------.J
5 10 15 20
3 NOl5E REDUCTION
Similar models for the Lorenz and Rossler attractors havebeen reported in (Aguirre and Billings, 1995e).
This estimated model settles to a strange attractor whichclosely resembles the original double scroll Chua's attractor,see figure 6b.
A difficulty which a.ppears to be common to most approaches for modelling nonlinear dynamical systems andchaotic attractors is that realistically noise will be presentin the data. In particular, it has been conjectured that thelocal divergence of nearby orbits in a chaotic system seemsto impose a natural limit on the accuracy of predictionbased identification algorithms when the data are noisy(Aguirre and Billings, 1995c). Consequently, there has beengreat motivation to develop filtering techniques for chaotic
SBA Controle & Automação jVo!.7 no. ljJan., Fev., Mar. e Abril 1996 57

II [.] =11 f}(k) - gdf}(k - 1)) li" + 11 f}(k + 1) - gJ.;(f}(k)) li"(13)
Another objective of filtering nonlinear data is to enablethe identification of dynamically valid modeis which wouldreproduce the aforementioned invariants from sequences offiltered data. In a first attempt to solve this identification problem, globalnonlinear predictors were used to filterthe data (Aguirre and Billings, 1995c). In such a procedure the noise was separated from the signal by means of(very) short-term predictions. Because a chaotic predictoractl1 ally amplifies uncertainties in some'direction' in statespace, the aforementioned approach cannot be used to filter the noise by successive passes through the data and thistherefore limits the achievable noise reduction.
where 11 . II is the Euclielean norm, anel
h['] =11 f}(k) - y(k) li"
Another option is to choose h['] as above and
(14)
This problem can be alleviated by using global smoothersbecause, unlike prediction-based techniql1es, smoothers arewell suited for filtering chaotic data via successive noisereduction iterations (Aguirre et ali!, 1995).
3.1 Filtering Techniques
It is usua.lly assumed that the noise is purely additive, 01' inother words the noise is entirely observational (Crutchfieldand McNamara, 1987; Casdagli ef alii, 1991; Grassberger etalii, 1991). Thus the noise reduction problem can be statedas follows: given a chaotic time series x(t). it is desired tofilter the measured data y(t)=x(t)+e(t), where e(t) is theaddi tive noise, in order to recover x (i). This is useful in'deaning' Poincaré sections and embedded attractors whichhave been blurreel by noise.
Another aspect of this problem is to find a 'noise-reduced'orbit f}(i) from which invariants such as '\1, De and theattractor geometry can be more accurately estimated thanif the noisy data y(t) were used. This is sometimes referredto as statistical noise reduction as opposed to recoveringx(t) from y(t) which has been called detailed noise reduetion(Farmer anel Sidorowich, 1991). In this paper, the objectiveis to be able to identify e1ynamically valid models from f}(t).
Filtering based on model predicteel outputs, whilst reducingthe noise content, in the data, willnot guarantee that f}(i)remains dose to y(t) (and ultimately dose to xCi)) if thelatter is chaotic. Thus, to ensure that f}(t) remains close toy(t), the following cost function can be useel
N
JNR = L {lI [y(k) - gJ.;(f}(k - 1))] + h [y(l.~) - y(k)]}k=l
(12)
where N is the number of points in the data, II [.] andh['] indicate functions which are usually metric norms andgk (-) are linear maps which describe the dynamics in aneighbourhood of a point on the tme orbit. Clearly II [.]penalizes deviations from the true deterministic dynamicsdescribed by gk(-) while h['] guarantees that the deanedorbit remains dose to the measured orbit.
In particular, the following cost functions have been used(Kostelich and Yorke, 1988; Kostelich and Yorke, 1990)
lI['] = 211 gJ.;(f}(k)) - f}(J..~ + 1) II T Pk (15)
where Jik are Lagrange multipliers (Fanner and Sielorowich,1991).
In the field of system identification, improving the signol tonoise ratio (SNR) is also of interest because this facilitatesboth the unbiaseel estimation of the parameter vector anelthe correct determination of the moelel structure. The chiefidea is to estimate the noise-fl'ee e1ata anel then use thisestimate to perform parameter estimation. A way of doingthis is to use the following preelictor which can be e1erivedfrom equation (5)
(16)
It should be realiseel that in the last equation the parameter vector 0 yu was estimateel from the original noisy dataas is indicateel by the absence of the hat on the subscripty. On the other hand, the matrix lliJu (t - 1) was formedusing predicted values of the data, that is y(t.) up to andinduding time t - 1. Because y(t) is an estimate of x(t),equation (16) can be used in suboptimal parameter estimation schemes (Billings and Voon, 1984). However, ifthedata were chaotic aftel' a few iterations iJ(t) would not bean accurate estimate of x(t) because of the sensitive dependence on initial conditions. Therefore the use of iJ(t) insuboptimal schemes seems somewhat restricted for chaoticsystems. The next two sections describe approaches whichovercome some of these problems.
3.2 The Resetting Filter
The following predictor has been suggesteel to overcomesome of the e1ifficulties associated with the filtering ofchaotic data (Aguirre and Billings, 1995c)
It should be noted that in this case iJ(t) is predicted basedon previous values of the measured data y( s), s ::; t-l, andnot based on previously prec!ictec! values such as in equation(16). Moreover, since this prec!ictor is usec! to prec!ict onlyone step into the future, the preelicted value iJ(t) is, in mostcases, guaranteed to remain dose to the data y(t). This can
58 SBA Controle & Automação jVol.? no. 1jJan., Fev., Mar. e Abril 1996

r Jr ~ r r1.2
~N
~A
0.8V \~
V
0.4~ V \
~
o 200 500 700N
Figure I - Noise-free original time senes for theMackey-Glass modei
M ~
# ~~
~J ~ ~ ~
r ~
\ ,
be interpreted as being a consequence of the resetting effectachieved by using measured data to initialise the predictorat each step. The predictor in equation (17) wiH be referredto as the resetting filter (RF) and it is adequate for filteringchaotic signals.
The qualitative effect attained by the resetting filter is, insome respects, analogous to other methods. The resettingeffect of the RF guarantees that h['] (see equation (12))is kept smal!. Moreover. the parameter vector of the RF isobtained by millimising JLS in equation (7), which is clearlyanalogous to -h['] in equation (12). The main differenceis that whilst gd') usually represents local linear maps,\JíT(t - 1) e is a global nonlinear map which may includeinputs and residual in addition to output terms.
Predictor-basecl filtering for chaotic systems will not workin general because of the inability of making long-termaccurate predictions along the unstable manifold. Therefore in such directions, the filter would actually amplifythe noise (Schreiber and Grassberger, 1991). The same isvalid for the RF, but to a much lesser extent because of theresetting effect which will guarantee that any noise amplification along the unstable manifold is kept to a minimum.However, if several passes through the data are required toattain the desired levei of noise reduction, it is inevitablethat the effect of positive Lyapunov exponents be manifest. Consequently, the filtered data may not resemble theoriginal sequence and, in fact, might have a greater noisecontent than the raw data.
1.2
0.8
0.4
o 200 500 700
3.3 Global Nonlinear Smoothers Figure 8modei
N
Noisy (raw) time series for the Mackey-Glass
The difficulty with the resetting filter in equation (17) isthat it only uses past information to predict the future.However, the dynamics can only be predicted with any certainty as t --;. ex) along the stable manifold. Conversely, thedynamics can only be 'predicted' along the unstable manifold in reverse time, that is as t --;. -<Xi (Schreiber andGrassberger, 1991). In other words, in order to estimatey(t), future information as weH as past information is required (Schreiber and Grassberger, 1991).
This motivates the search for NARMAX smoothers of theform
unstable directions because it contains terms which relateto the future. Such terms will enable 'predicting' in reversetime since orbits converge along the unstable manifold ast --;. -'x'. An iterative procedure for smoothing data using nonlinear smoothers has been given in (Aguirre et alii,1995).
y(t) Fs' [y(t - n y ), ... , y(t - I), y(t + 1), ... , y(t + n y ),
'U(t - d - nu + 1), ... , 'U(t - d), 'U(t + d), ...
... , 'll(t + d + nu - I),
ç(t-1), ... ,Ç(t-ne )]+ç(t). (18) 3.3.1 An Example
It should be noted that equations analogous to (5)-(7) canbe derived for the smoother in equation (18). Moreover,the ERR criterion, used to select the most important termsto compose a NARMAX model, can also be used to selectthe structure of the smoother and the same least squaresalgorithm can be used to estimate the parameters.
From a dynamical point of view, the smoother in equation(18) will also succeed in predicting the dynamics along the
Zero-mean Gaussian noise was added to a set of data obtained from the Mackey-Glass model (Mackey and Glass,1977) (see first papel' in the series). The resulting recordswith SNR=40.2 dB were smoothed with global nonlinearsmoothers. Figures 7-9 respectively show the noise-free,noisy and smoothed data for the Mackey-Glass model andfigure 10 shows the resulting data filtered following theRF approach. These figures make it plainly clear thatprediction-type approaches for noise reduction are not suitable for chaotic data.
SBA Controle & Automação /Vol.7 no. l/Jan., Fev., Mar. e Abril 1996 59

0.8
0.4
Most of the works concerned with the control of chaos areclevoted to stabilising a chaotic system to regular clynamics, that is, fixeel points, perioelic orbits or quasiperioelicregimes. The relateel pl'Oblem of elriving a system from aregular to a chaotic regime has received less attention. Thistype of control coulel be important in situations where chaosis not only welcome but a.lso desirable (Golelberger ei alá,1990; Chang, 1992; Ottino, 1992; Cuomo ei alii, 199;3; Wuand CIma, 1993).
enhances heat transfer (Chang, 1992), improves 111lXlllgin chemical reactions (Ottino, 1992), reduces ielle-channeltones in modulators (Schreier, 1994) anel seems to have apromising future in secure communication systems (Cuomoei alá, 199;3; "'"U anel CIma, 1993; Parlitz ef alii, 1992).In aclelition, some authors have suggested that chaotic clynamics inelicate a hea.lthy state as opposed to the eliseaseswhich manifest as physiological periodic signa.ls (Glass etalii, 1987; Golelberger ei alii, 1990). The matter of howhealthy chaos is, however. is far from settleel (Pool, 1989).Consequently, techniques for controlling nonlinear elynamics are requireel in oreler to provoke or suppress chaos or anyother elynamical regime accoreling to the particular application at hand (Chen anel Dong, 1993a; Ditto anel Pecora,1993; Hunt anel Johnson, 1993).
700200
v V
o
Figure 9 - Smoothed time series for the Mackey-Glassmodel. Terms with both negative and positive lags wereused to compose the smoother, Np =10.
0.8
1.2
Figure 10 Filtewd time series for the Mackey-Glassmodel. Only l('rl11;'; \"it-h negative lags were used to composethe resetting filIeI'. X p =10.
0.4
o 200N
500 700
Clearly, chaos is per se neither beneficiaI nor harmful asdescribeel by James Gleick "In some applications, turbulence is desirahle - insiele a jet engine, for example, whereefficient burning elepenels on rapiel mixing. But in most,turbulence means disaster. Turbulent airfiow over a wingelestl'OYs lift. Turbulent fiow in an oil pipe creates stupefying elrag" (Gleick, 1987, p. 122). Therefore it seems appropriate to search for control schemes which would performwell in both situations.
4 CONTROL AND SYNCHRONIZATIDNDf CHAOS
Is chaos a beneficiaI dynamical steaely state? This is a central question in tlw control of chaotic systems. Of course,if the answer to the above question is yes, a.pplieel scientists and contl'Ol engineers would be investigating ways ofprovoking chaos rat-her than suppressing it. A negative answer, on the other hand, woulcl pl'Ompt researchers in theopposite elirection.
If on the one hand sensitivity to initia.l conditions hampersprediction-based contl'Ol schemes, on the other hand sucha property might turn out to be greatly advantageous froma control point of view. To see this it should be recalleelthat if a system is sensitive to initial conditions, a sma.llperturbation at time ia can provoke relatively large effectsat time i > ia. This means that to achieve a certain contraIobjective may require a much smaller control action if thesystem were chaotic. The prablem of COUl'se is to determinehow and when shoulel the control adion be applied. Someworks in this direction have appeared in the literature (Ottei alii, 1990; Ditto ei alii, 1990; Garfinkel ei alii, 1992;Nitsche anel Dressler, 1992; Romeiras ei alii, 1992; Shinbrotei alii, 1990; Spano ei alá, 1991).
Because of the sensitive depenclence on initial conelitions,displayed by chaotic systems, it is impossible to make accurate long-term preclictions of such systems. In many situations, however, it is clesirable that the system uneler investigation be predictable. Furthermore, the appearance ofchaotic dynamics is not always welcome because in somesituations it has been associatecl with abnonnal behaviour(Glass and Mackey, 1988, pages 177, 179).
Many different techniques have been investigated in thecontext of contl'Olling chaos. Most met.hods can be groupeelinto two categories. \iVhen it. is desireel that. chaos be suppressed the appraaches are labelled under conirol of chaosand when t.he main objective is to make a syst.em followa chaot.ic trajectory t.he problem at hand is referred t.o assynchronizaiion of chaos.
In other applications the onset of chaos seems to have several aclvantages. For instance, it has been argued that "acognitive system musi be chaotic in order to perform effective signal processing" (Nicolis, 1984). Further, chaos
Chaos can be suppressed by the addition of small amplitude perturbations (Braiman and Goldhirsch, 1991), random perturbations (Kapitaniak, 1991), by paramet.ric driving (Dorning ei alii, 1992; Fl'Onzoni ei alii, 1991; Lima and
60 SBA Controle & Automação jVol.? no. 1jJan., Fev., Mar. e Abril 1996

Pettini, 1990), by means of feedback (Liu et alii, 1994).
The problem of synchronization has been investigated in(CIma et alii, 1993; Kocarev et alii, 1993; Ogorzalek, 199:3;Pecora, 1990; Wu anel CIma, 1993).
The stahilization of chaotic systems has been achieveel byapplying feedback (Chen and Dong, 1993b; Deelieu anelOgorzalek, 1994; Hunt, 1991; Pyragas, 1992; Roy et alii,1992), frequency harmonic balance techniques (Genesio andTesi, 199:3; Genesio anel Tesi, 1992), conventional controltechniques (Hartley anel Mossayebi, 1993), open plus closeelloop control (.lackson anel Grosu .. 1994), dynamical vibration absorbers (Kapitaniak et alii, 1993), adaptive control(Sinha et alii, 1990; Vassiliaelis, 1993) and quantitativefeeelback elesign (QFD) (Yau et alii, 1993). The control ofmultipie attraetor systems has been investigateel in (.J ackson, 1990).
Most of the references above are concerneel with systemswhich are chaotic before control is applied. However, chaoshas been eletected in control systems in which the plantwas not chaotic. Conelitions for the occurrence of chaos infeeelback systems (Genesio anel Tesi, 1991), adaptive control(Mareels anel Bitmead, 1986; Mareels and Bitmeael, 1988;Golden anel Yelstie, 1992) anel in eligital systems (Ushio andHsu, 1987) have been reported in the literature.
The use of ielentifieel moelels in the design of control schemeshas been addressed in (Aguirre anel Billings, 1994b; Aguirreanel Billings, 1995a; Aguirre, 1995b). It turns out that aslong as an ielentified model reproduces some of the majorelynamical features of the system, such a moelel can be usedeffectively in control problems. Many control schemes donot require a moelel 01' may even work with a moelel which isnot dynamically valid but in such cases the control effort isusually greater and the control quality significantly poorer.
5 FINAL REMARK5
The subject of nonlinear dynamical systems has attraetedgreat attention in recent years. It is therefore natural thatvarious techniques for moeleling and reconstructing suchsystems shoulel be investigated. In this respeet a landmarkhas been Taken's theorem and a number of subsequent results which today form the fielel of embedology. Parallel tothese results, other techniques were developed by the engineering community. Such methoels for the identificationof nonlinear systems useel other model structures such asVolterra and Wiener models, NARMAX modeIs and neural networks. In the first part of this papel', the basic ideaof embeelding techniques has been reviewd. Similarly, theestimation on NARMAX polynomial moelels has been discusseel and some differences between such approaches havebeen pointed out. The moeleling of some nonlinear systemshas been illustrateel by numerical examples.
A major limitation in obtaining a good model for a nonlinear system is the noise present in the data. Noise can be, ina few cases, kept to a minimum but cannot be totally eliminated. Consequently there has been great interest in noisereduction algorithms. Some of such algorithms have been
revieweel in a rather general framework anel two algorithms,the resetting filter anel nonlinear smoothers, have been described in some eletail. It has been pointeel out that if theelata are chaotic special algorithms are usually required toachieve effeetive noise reduction.
Finally, a major issue in nonlinear dynamics nowaelays isthe control of chaotic systems. An enormous amount ofpapers have been publisheel on this subjeet in the last yearsand a thorough review would be impossible. Nonetheless,several relevant references have been provieled in oreler toenable the reaeler to further investigate this topic.
Throughout the papel' it has been shown how NARMAXmoelels can be useel in the various problems concerning themoeleling, noise reduction and control of nonlinear systemsand chaos.
Acknowledgements
Financiai support from CNPq under grant 522538/95-9 isgratefully acknowledged.
REFERENCE5
Abarbanel, H. D. 1., Brown, R., and Kadtke, .l. B. (1989).Preeliction anel system identification in chaotic nonlinear systems: time series with broaelband speetra.Phys. Leit., 138(8):401-408.
Abarbanel, H. D. 1., Brown, R., anel Kaeltke, .l. B. (1990).Prediction in chaotic nonlinear systems: Methoels fortime series with broaelband Fourier speetra. Phys.Rev. A, 41(4):1782-1807.
Adomaitis, R. A., Farber, R. M., Huelson, .l. L.,Kevrekielis, I. G., Kube, M., anel Lapedes, A. S. (1990).Application of neuralnets to system identification anelbifurcation ana.\ysis of real world experimental elata.In Neural N etworks: Biological cornputers or e!ectronicbrains, pages 87-97. Springer Verlag, Paris.
Aguirre, L. A. (1994). Some remarks on strueture seleetion for nonlinear moelels. Int. 1. Bifurcation andChaos, 4(6):1707-1714.
Aguirre, L. A. (1995a). A nonlinear correlation functionfor seleeting the delay time in dynamical reconstructions. Phys. Leit. A, 203(2,3):88-94.
Aguirre, L. A. (1995b). The use of identified modeis inthe control of chaotic systems. In Preprints of theIEEE International Symposium 011. Circu-its and Systems, pages 1528-1531, Seattle, USA.
Aguirre, L. A. and Billings, S. A. (1994a.). Discrete reconstruetion of strange attractors in Chua's circuito 111.1.
J. Bifurcatio1/. and Chaos, 4( 4) :853-864.
Aguirre, L. A. anel Billings, S. A. (l994b). Moelel reference control of regular and chaotic dynamics in theDuffing-Ueda oscillator. IEEE Trans. Circuits Syst. I,41(7):477-480.
SBA Controle &. Automação /Vol.7 no. l/Jan., Fev., Mar. e Abril 1996 61

Aguirre, L. A. and Billings, S. A. (1994c). Validating identified nonlinear models with chaotic dynamics. Int. J.Bifureation anel Chao,s, 4( 1):109-125.
Aguirre, L. A. and Billings, S. A. (1995a). Closed-Ioopsuppression of chaos in a nonlinear oscillator. Journa!of Non!inear Seienee, 5(3):189-206.
Aguirre, L. A. and Billings, S. A. (1995b). Dynamical effects of overparametrization in nonlinear models.Phy,sica D, 80(1,2):26-40.
Aguirre, L. A. anel Billings, S. A. (1995c). lelentificationof moelels for chaotic systems from noisy elata: implication for performance anel nonlinear filtering. Phy,sieaD, 85( 1,2 ):239-2138.
Aguirre, L. A. anel Billings, S. A. (1995el). Improveel structure selection for nonlinear moelels based on term C!ustering. 1nt. J. Contro!,62(3):.569-587.
Aguirre, L. A. and Billings, S. A. (1995e). Retrieving dynamica.l invariants from chaotic elata using NARMAXmodels. In1. J. Bif1/,reation anel Chao,s, 5(2):449-474.
Aguirre, L. A., Mendes, E. M., and Billings, S. A. (1995).Smoothing data with local instahilities for the identification of chaotic systems. Int. J. Contro!, (in press).
Akaike, H. (1974). A new look at the statistical modelidentification. IEEE Tran,s. Autom.a1. Contr.,19( 6) :7l()-723.
Albano, A. M., Muench, .1., Schwartz, C., Mees, A. 1., andRapp, P. E. (1988). Singular-value decomposition anelthe Grassberger-Procaccia algorithm. Phy,s. Rell. A,38(6 ):3017-3026.
Albano, A. M., Passamante, A., and Farrell, Iv!. E. (1991).Using higher-order correlations to define an embeddingwindow. Phy,siea D, 54:85-97.
Aleksié, Z. (1991). Estimating the embedding dimensionoPhy,siea D, 52:362-368.
Baake, E., Baake, M., Bock, H. G., and Briggs, K. M.(1992). Fitting ordinary differentia.l equations tochaotic data. Phy,s. Rev. A, 45(8):5524-5529.
Billings, S. A. (1980). Identification of nonlinear systems- a survey. IEE Proceeelig,s P1. D, 127(6):272-285.
Billings, S. A. and Aguirre, L. A. (1995). Effects of thesampling time on the dynamics and ielentification ofnonlinear models. Int. J. Bifurcation anel Chao,s,5(6):1541 - 1556.
Billings, S. A. and Chen, S. (1992). Neural networks andsystem ielentification. In VVarwick, K., Irwing, G. W.,and Hunt, K. .1., editors, Neura! Netwok,s for Sy,stem,sanel Contro!, chapter 9, pages 181-205. Peter Peregrinus, London.
Billings, S. A., Chen, S., and Korenberg, M. .1. (1989).Identification of MIMO nonlinear systems using aforward-regression orthogonal estimator. In1. J. Contra!,49(6):2157-2189.
Billings, S. A., Korenberg, M. .1., anel Chen, S. (1988).Identification of nonlinear output afline systems usingan orthogonalleast squares a.lgorithm. Int. J. Sy,ste111,sSei., 19(8):1559-1568.
Billings, S. A. anel Voon, W. S. F. (1984). Least squaresparameter estimation algorithms for nonlinear systems. Inl. J. 8y,sle1118 8ei., 15(6):601-615.
Billings, S. A. and Voon, W. S. F. (1987). Piecewise linearidentification of non-linear systems. Inl. J. Contra!,46( 1):215-235.
Braiman, Y. and Goldhirsch, I. (1991). Taming chaoticdynamics with weak periodic perturbations. Phy,s.Rm LeU., 66(20):2545-2548.
Breedon,.1. L. and Packard, N. H. (1992). Nonlinear analysis of data sampleelnonuniformly in time. Phy,siea D,58:273-283.
Broomhead, D. S., Huke, .1. P., and Muldoon, M. R.(1992). Linear filters and nonlinear systems. J. R.Stat. Soe. B, 54(2)::373-382.
Broomhead, D. S. anel King, G. P. (1986). Extractingqualitative dynamics from experimental data. Phy,sieaD, 20:217-236.
Broomhead, D. S. and Lowe, D. (1988). Multivariablefunctional interpolation anel adaptive networks. Co 111
pio; 8:I),stem.,s , 2:321-355.
Brown, R., Bryant, P., and Abarbanel, H. D. I. (1991).Computing the Lyapunov spectrum of a dynamical system from an observeel time series. Phy,s. Rell. A,4:3(6):2787-2806.
Brown, R., Rulkov, N. F., and Tracy, E. R. (1994). Modeling and synchronizing chaotic systems from time-seriesdata. Phy,s. Rell. E, 49(5):3784-3800.
Buzug, T. and Pfister, G. (1992). Comparison of algorithms calculating optimal embedding parameters fordelay doordinates. Phy,sica D, 58:127-137.
Buzug, T., Reimers, R., and Pfister, G. (1990). Optimalrecollstruction of strange attractors from purely geometricalarguments. Europhy,s. LeU., 13(7):605-610.
Casdagli, M. (1989). Nolllinear prediction of chaotic timesenes. Phy,sica D, 35:335-356.
Casdagli, M. (1991). Chaos and deterministic ver,sl1,sstochastic non-linear modelling. J. R. Stat. Soe. B,54(2):303-328.
Casdagli, M. (1992). A dynamical systems approach tomodeling input-output systems. In Casdagli, M. andEubank, S., editors, Non!inear Moele!ing anel Foreea,sting, pages 265-281. Aeldison Wesley, New York.
Casdagli, M., Eubank, S., Farmer,.1. D., and Gibson,.1.(1991). State space reconstruction in the presence ofnoise. Phy,sica. D, 51:52-98.
62 5BA Controle & Automação jVol.7 no. 1jJan., Fev., Mar. e Abril 1996

Casdagli, M., Jardins, D. D., Eubank, S., Farmer, J. D.,Gibson, .1., Theiler, .1., and Hunt.er, N. (1992). Nonlinear modeling of chaot.ic time series: theory and applications. In Kim, J. H. anel Stringer, .1., editors, Applied Chaos, chapter 15, pages 335-380. John "'hley &Sons., New York.
Cenys, _A. and Pyragas, K. (1988). Estimation of t.henumber of c1egrees of freedom from chaotic time series.Phys. Leit., 129A(4):227-230.
Chang, H. C. (1992). Chaotic mixing for heat transferenhancement. In lúm, J. H. and St.ringer, .1., editors,Applied Chaos, chapter 6, pages 175-188. John Wiley& Sons, Inc.
Chen, G. and Dong, X. (1993a). From chaos t.o order Perspectives anel methoelologies in cont.rolling chaoticnonlinear elynamical systems. Int. J. Bifurcation andChaos,3(6):1363-1409.
Chen, G. anel Dong, X. (1993b). On feeelback cont.rol ofchaotic continuous-time systems. IEEE Trans. Cirntits 8yst., 40(9):591-601.
Chen, S., Billings, S. A., Cowan, C. F. N., anel Grant,P. M. (1990). Practical ielentificat.ion of NARMAXmoelels using radial basis functions. Int. J. Control,52(6):1327-1350.
Chen, S., Billings, S. A., anel Luo, W. (1989). Orthogonalleast squares methoels anel their application to nonlinear system ielentification. Int. J. Control, 50(5): 18731896.
Cheng, B. anel Tong, H. (1992). On consistent nonparametric oreler eletermination anel chaos. J. R. 8tat. 80c.B, 54(2):427-449.
Chennaoui, A., Pawelzik, K., Liebert, ·VV., Schuster, G. H.,anel Pfister, G. (1990). Attractor reconstruction fromfiltereel chaotic time series. Phys. Rev. A,41(8):41514159.
CIma, L. O., Itoh, M., Kocarev, L., anel Eckert, K. (1993).Chaos synchronization in Chua's circuit. J. Circuits8yst. Comput., :3(1):93-108.
Cremers, .1. anel Hübler, A. (1987). Construction of elifferential equations from experimental elata. Z. Naturforsch, 42a:797-802.
Crutchfielel, J. P. anel McNamara, B. S. (1987). Equationsof motion from a elata series. Complex 8ystems, 1:417452.
Cuomo, K. M., Oppenheim, A. V., anel Strogatz, S. H.(1993). Robustness anel signal recovery in a synchronizeel chaotic system. Int. J. Bifurcation and Chaos,3(6):1629-1638.
Davies, M. E. (1992). An iterateel function approximationin shaelowing time series. Phys. Leit., 169 A:251-258.
Deelieu, H. anel Ogorzalek, M. (1994). Controlling chaos inchua's circuito via sampleel inputs. Int. J. Bifurcatiolland Chaos, 4(2):447-455.
Dent.on, T. A. anel Diamond, G. A. (1991). Can the analytic t.echniques of nonlinear elynamics elistinguish perioelic, ranelom anel chaotic signals? Compt. ElOl. Med.,21( 4):243-264.
Ditto, \tV. L. anel Pecora, L. M. (1993). Mastering chaos.8cientific A merican, pages 62-68.
Ditto, W. L., Rauseo, S. N., anel Spano, M. L. (1990).Experiment.al control of chaos. Ph:ljs. Re·v. Leit.,65(26 ):3211-:3214.
Dorning, J . .1., Decker . .1., anel P., H. J. (1992). Controlling the elynamics of chaotic convective ftows. InKim, J. H. anel St.ringer, .1., eelitors. Appl-ied Chaos,chapter 7, pages 189-206..John Wiley & Sons, Inc.
Eckmann, .1. P. anel Ruelle, D. (1985). Ergoelic theoryof chaos anel st.range attractors. Rev. M od. Phys.,57( 3):617-656.
Elsner, J. B. (1992). Preelicting time series using a neural net.work as a met.hoel of elistinguishing chaos fromnoise. J. Phys. A: Math. Gen., 25:843-850.
Farmer, .1. D. anel Sielorowich, J. J. (1987). Preelictingchaot.ic time series. Ph:ljs. Rev. Leit., 59(8):845-848.
Farmer, J. D. anel Sielorowich, J. J. (1 988a). Exploitingchaos to preelict the future anel reeluce noise. In Lee,Y., eelitor, Evolution, Learning and Cognition. W'orlelScientific, Singapore.
Farmer, J. D. anel Sidorowich, J ..1. (1988b). Preelietingchaotic elynamics. In Kelso, J. A. S., Manelell, A. .1.,and Shlesinger, M. F., eelitors, Dynamic paiterns incomplex systems, pages 265-292. Worlel Scientific, Singapore.
Farmer, J. D. anel Sielorowich,.1. J. (1991). Optimal shaelowing anel noise reeluction. Physica D, 47:373-392.
Fraser, A. M. (1989). Information anel entropy instrange att.ractors. IEEE Trans. Informatian Theary,3.5(2):245-262.
Fronzoni, L., Gioconelo, M., anel Pettini, M. (1991). Experimental evielence of suppression of chaos by resonant parametric perturbations. Phys. Rev. A,43( 12) :648:3-6487.
Garfinkel, A., Spano, rvI. L., Ditto, W. L., anel Weiss, J. N.(1992). Controlling cardiac chaos. 8cience, 257:12301235.
Genesio, R. anel Tesi, A. (1991). Chaos preeliction innonlinear feeelback systems. IEE Prac. Pt. D,138(4):313320.
Genesio, R. anel Tesi, A. (1992). A harmonic balancemethoels for the analysis of chaotic elynamics in nonlinear syst.ems. Automatica,28(3):531-548.
Genesio, R. anel Tesi, A. (1993). Distortion cont.rol ofchaotic systems: the Chua's circuito J. Circuits 8yst.Cornput.,3(1):151-171.
Gibson, J. F., Farmer, J. D., Caselagli, M., anel Eubank, S.(1992). An aelnalytic approach t.o praetical st.ate spacereconstruction. Physica D, 57:1.
SBA Controle & Automação jVol.7 no. 1jJan., Fev., Mar. e Abril 1996 63

Giona, M., Lentini, F., anel Cimagalli, V. (1991). Functional reconstruction anel local preeliction of chaotictime series. Phys. Rev. A,44(6):3496-3502.
Glass, L., Golelberger, A., Courtemanche, M., anel Shrier,A. (1987). Nonlillear elynamics, cimos anel complexcareliac arrythmias. Pr'OC. R.. Soe. Lonel. A, 41:3:9-26.
Glass, L. anel Mackey, M. (1988). F'rom Clocb to Chaos- The Rhythms of Life. Princeton University Press,Prillceton.
Gleick, .1. (1987). Chaos; making a ne'W science. Abacus,Lonelon.
Golelberger, A., Ringney, D., anel West, B. (19~)0). Chaosanel fractaIs in human physiology. Scientific "4merican,pages 34-41.
Golden, M. P. anel Yelstie, B. E. (1992). Smal! amplituelechaos anel ergoelicity in aelaptive contro!. A utoTl7atica,28(1):11-25.
Gooijer, J. G., Abraham, B., Goulel, A., anel Robinson,L. (1985). Methoels for eletermining the oreler of anautoregressive-moving average process: a survey. Int.Statistical Re'view, 53( 3):301-329.
Gottwalel, .1. A., Virgin, L. N., anel Dowel!, E. H. (1992).Experimentalmimicry of Duffing's equation . .J. SounelVibr., 158(3):447-467.
Gouesbet, G. anel Maquet, .1. (1992). Construction ofphenomenological moelels from numerical scalar time series. Physica D, 58:202-215.
Grassberger, P., Hegger, R., Kantz, H., anel Schaffrath, C.(1993). On noise reeluction methoels for chaotic elata.Chaos, 3(2):127-141.
Grassberger, P., Schreiber, .1., anel Schaffrath, C. (1991).Nonlinear time sequence analysis. Int. .J. Bifurcationanel Chaos, 1(3) :521~547.
Guckenheimer, J. (1982). Noise in chaotic systems. N ature, 298:358-361.
Haber, R. anel Unbehauen, H. (1990). Structure ielentification of nonlinear elynamic systems - A survey oninputjoutput approaches. A utomatica, 26(4) :651-677.
Hammel, S. H. (1990). A noise reeluction methoel forchaotic systems. Phys. LeU., 148 A(8,9):421-428.
Hartley, T. T. anel Mossayebi, F. (1993). ContraI of chua'scircuito J. Circuits Syst. Comput., ;3(1):173-194.
Hénon, M. (1976). A two-elimensionalmap with a strangeattractor. Commun. M ath. Phys., 50:69-77.
Holzfuss, J. anel Kaeltke, J. (1993). Global nonlinear noisereeluction using raelial basis functions. Int. J. Bifurcation anel Chaos, 3(3):589-596.
Hunt, E. R. (1991). Stabilizing high-performance orbitsin a chaotic system: the elioele resonator. Phys. Rev.LeU., 67(15):1953-1955.
Hunt, E. R. anel Johnson, G. (1993). Keeping chaos atbay. IEEE Spectr1l.1n, pages 31-36.
Hunter, N. F. (1992). Application ofnonlinear time-seriesmoelels to elriven systems. In Caselagli, M. anel Eubank, S., eelitors, Nonlinear Moeleling anel Forecasting,pages 467-491. Aelelison Wesley, New York.
Jackson, E. A. (1990). The entrainment anel migrationcontrols of multiple-attractor systems. Phys. Léu.,151A(9):478-484.
Jackson. E. A. anel Grosu, I. (1994). An op~li-plus
closeel-Ioop (OPCL) control of complex elynamic system. Technical Report CCSR-94-7, University of Illinois, Center for Complex Systems Research.
Johansen, T. A. anel Foss, B. A. (1993). ConstructingNARMAX moelels using ARMAX moelels. Int. J.Control,58(5):1125-115:3.
Kaeltke, .l. B., Brush, .1., anel Holzfuss, .l. (1993). Globalelynamical equations anel Lyapunov exponents fro111noisy chaotic time series. Int. J. Bifurcation anelChaos, 3(3):607-616.
Kapitaniak, T. (1991). The loss of chaos in aquasiperioelically-forceel nonlinear oscil!ator. 1nt. .J.Bif1lrcation anel Chaos, 1(2):357-362.
Kapitaniak, T., Kocarev, L..1., anel CIma, L. O. (1993).Control!ing chaos without feeelback anel control signals.Int . .J. Bifurcation anel Chaos, 3(2):459-468.
Kashyap, R. L. (1977). A bayesian comparison of elifferentclasses of elynamica moelels using empirical data. IEEETrans. Automat. Contr., 22(5):715-727.
Kember, G. anel Fowler, A. C. (1993). A correlation function for choosing time elelays in phase portrait reconstructions. Phys. LeU., 179A(2):72-80.
Kennel, M. B., Brown, R., anel Abarbanel, H. D. I. (1992).Determining embeelding elimensions for phase-space reconstruction using geometrical construction. Phys.Rev. A, 45(6):3403-3411.
Kennel, M. B. anel Isabelle, S. (1992). Methoel to elistinguish possible chaos from coloureel noise anel todetermine embeeleling parameters. Phys. Rev. A,46( 6):3111-3118.
King, G. P. anel Stewart, I. (1992). Phase space reconstruction for symmetric elynamical systems. PhysicaD, 58:216-228.
Kocarev, L., Shang, A., anel CIma, L. O. (1993). Transitions in elynamical regimes by elriving: A unifieelmethoel of control anel synchronization of cimos. In1..J. Bifurca.tion anel Chaos, 3(2):479-483.
Korenberg, M. .l., Billings, S. A., Liu, Y. P., anel McIlroy, P. .l. (1988). Orthogonal parameter estimationalgorithm for nonlinear stochastic systems. Int. J.Control, 48(1):193-210.
Korenberg, M..1. anel Paarmann, L. D. (1991). Orthogonal approaches to time-series analysis anel system ielentification. IEEE S'ignal Processing Magazine, 8(3) :2943.
64 SBA Controle & Automação jVol.7 no. 1jJan., Fev., Mar. e Abril 1996

Kostelich, E..1. and Yorke, .I. A. (1988). Noise reductionin dynamicalsystems. Phys. Rev. A, 38(3):1649-1652.
Kostelich, E ..1. and Yorke, .I. A. (1990). Noise reduction:Finding the simplest elynamical system consistent withthe data. Physica D, 41:183-196.
Leontaritis, I..l. anel Billings, S. A. (1985a). Input-outputparametric models for nonlinear systems part I: cleter
,'I !~ninisticnonlinear systems. Int. J. Contrai, 41(2) :303328.
Leontaritis, I. .I. anel Billings, S. A. (1985b). Inputoutput parametric moelels for nonlinear systems part11: stochastic nonlinear systems. Int. J. Contrai,41(2):329-344.
Liebert, W. anel Schuster, H. G. (1989). Proper choice ofthe time delay for the analysis of chaotic series. Phys.Leit., 142A(2,3):107-111.
Lima, R. anel Pettini, M. (1990). Suppression of chaosby resonant parametric perturbatios. Phys. Rev. A,41(2):726-33.
Linsay, P. S. (1991). An efficient methoel of forecastingchaotic time series using linear regression. Phys. Leit.,153A(6,7):35:3-356.
Liu, Y., Barbosa, L. C., anel Rios-Leite, .I. R. (1994). Suppression of chaos in a CO2 laser by feedback. Phys.Leit., 19:3A:259-262.
Lorenz, E. (1963). Deterministic nonperioelic flow. J. A tmos. Sei., 20:282-293.
Mackey, M. C. anel Glass, L. (1977). Oscillation anel chaosin physiological control systems. Seienee, 197:287-289.
Mahfouz, I. A. and Baelrakhan, F. (1990a). Chaotic behaviour of some piecewise-linear systems part I: Systems with set up spring 01' with unsymetric elasticity.J. SO'llnd Vibr., 143(2):2.5.5-288.
Mahfouz, I. A. and Baelrakhan, F. (1990b). Chaotic behaviour of some piecewise-linear systems part 11: Systems with clearance. J. Sound Vibr., 143(2):289-328.
Mareels, I. M. Y. and Bitmeael, R. R. (1986). Non-linearelynamics in adaptive control: cha.otic and periodic stabilization. A'I1tomotiea, 22(6):641-655.
Mareels, I. M. Y. and Bitmeacl, R. R. (1988). Non-lineardynamics in aelaptive control: perioelic anel chaotic stabilization - 11. Analysis. Automotiea, 24(4) :485-497.
Marteau, P. F. and Abarbanel, H. D. I. (1991). Noisereduction in chaotic times series using scaleel probabilistic methoels. J. Nonlinear Sei., 1:313-343.
Martinerie, .I. M., Albano, A. M., Mees, A. 1., anel Rapp,P. E. (1992). Mutual information, strange attractors,anel the optimal estimation of dimensiono Phys. Rev.A, 45(10):7058-7064.
Mees, A. I. (1993). Parsimonious dynamical reconstruction. Int. J. Bifureation and Chaos, 3(3):669-675.
Mitschke, F. (1990). Acausal filters for chaotic signals.Phys. Rev. A, 41(2):1169-1171.
Nicolis,.l. S. (1984). The role of chaos in reliable information processing. J. Franklin Institue, 317(5):289-307.
Nitsche, G. anel Dressler, U. (H)92). Controlling chaoticelynamical systems using time elelay coorelinates. Ph:lJsiea D, 58:153-164.
Ogorzalek, M. .I. (1993). Taming chaos: Part I - synchronization. IEEE Trans. CirC'lIits Syst. I, 40( 10):693699.
ou, E., Grebogi, C., anel )'orke, .I. A. (1990). Controllingchaos. Phys. Re11. Leit.,64(11):l1DG-1199.
OUino, .J. M. (1992). New applications of chaos in chemical engineering: intuition versus preeliction. In Kim,.I. H. anel Stringer, .I., editors, Applied Chaos, chapter 5, pages 14:3-174. .lohn Wiley & Sons, Inc.
Ozaki, T. (1993). A locallinearization approach to nonlinear filtering. Int. J. Control,57(1):75-96.
Packard, N. H., Crutchfielel, .I. P., Farmer, .I. D., andShaw, R. S. (1980). Geometry from a time series.Phys. Rev. Leit.,45(9):712-716.
Parlitz, U., CIma., L. O., Kocarev, L., Halle, K. S., andShang, A. (1992). Transmission of eligital signals bychaotic synchronization. Int. J. Bif. Choos, 2(4):973977.
Pecora, L. M. Carroll, T. L. (1990). Synchronization inchaotic systems. Phys. Rev. Leit., 64(8):821-824.
Pool, R. (1989). Is it healthy to be chaotic? Seienee,243:604-607.
Principe, .I. C., Rathie, A., and Kuo, .I. M. (1992). Preeliction of chaotic time series with neuralnetworks anelthe issue of elynamic moeleling. Int. J. Bif'll.reation andChaos, 2(4):989-996.
Pyragas, K. (1992). Continuous control of chaos by selfcontrolling feeelback. Phys. Leit., 170A:421-428.
Romeiras, F . .I., Grebogi, C., Ott, E., anel Dayawansa,W. P. (1992). Controlling chaotic elynamical systems.Physiea D, 58:165-192.
Rosenstein, M. T., Collins, .I . .I., anel De Luca, C . .I.(1994). Reconstruction expansion as a geometry-baseelframework for choosing proper delay times. Physica D,73:82-98.
Roy, R., Murphy, .Jr., T. W., Maier, T. D., and Gills,Z. (1992). Dynamical control of a chaotic laser: experimentaI stabilization of a globally coupled system.Phys. Re·v. Leit.,68(9):1259-1262.
Sauer, T., Yorke, .I. A., and Caselagli, M. (1991). Embedology. J. of Stat-istieal Physies, 65(3/4):579-616.
Schreiber, T. and Grassberger, P. (1991). A simpIe noisereduction methoel for real data. Phys. Leit., 160A(5):411-418.
Schreier, R. (1994). On the use of chaos to reduce iellechannel tones in eleIta-sigma modulators. IEEE Trans.CirC'l/its Syst. 1,41(8):539-547.
SBA Controle & Automação IVo!.7 no. 1/Jan., Fev., Mar. e Abril 1996 65

Shinbrot, T., Ott, E., Grebogi, C., anel Yorke,.l. A. (1990).Using chaos to elirect trajectories to targets. PII.:/j.s.Rev. Leit., 65(26) :3215-3218.
Sinha, S., Ramaswamy, R., anel Rao, .l. S. (1990). Aelaptive control in nonlinear elynamics. Phy.siea D, 43:118128.
Soelerstrom, T. anel Stoica, P. (1989). Sy.stem Identifieat-ion. Prentice Hall, Lonelon.
Spano, M. L., Ditto, W. L., anel Rauseo, S. N. (1991).Exploitation of chaos for active control: an experimentoJ. of Intel!. 111ater. Slj.st. and Struet., 2:482-49:3.
Stokbro, L. anel Umberger, D. K. (1992). Forecasting withweighteel maps. In Caselagli, M. anel Eubank, S., eelitors, NonlinearModeling and Foreea.st-lng, pages 73-93.Aelelison Wesley, New York.
Takens, F. (1980). Detecting strange attractors in turbulence. In Ranel, D. A. anel Young, L. S., eelitors,Dynamieal .s:lj.stems and turbulenef, Leeture N ote.s inMathemat-ie.s, 1'01. 898, pages 366-381. Springer Verlag, Berlin.
Ushio, T. anel Hsu, C. S. (198T). Chaotic rouneling errorin digital control systems. IEEE Tran.s. Cireuit.s Sy.st.,:34(2): 13:3-139.
Vassiliadis, D. (1993).NMR laser moelel.3(3):T93-T96.
Parametric aelaptive control of anIn i. 1. Bifureation and Chao.s,
'Wayland, R., Pickett, D., Bromley, D., anel Passamante,A. (1993). Measuring the preelictability of noisy recurrent time series. Int. J. Bifureation and Chao.s,3(3):797-802.
Whaba, G. (1992). Multivariabe function anel operator estimation, baseel on smoothing splines anel reproelucingkernels. In Casdagli, M. anel Eubank, S., eelitors, Nonlinear Modeling and Foreea.sting, pages 95-112. Aelelison Wesley, New York:
Wu, C. W. anel CIma, L. O. (1993). A simple way tosynchronize chaotic systems with applications to secure communication systems. Int. J. Bifureation andChao.s, 3(6):1619-1627.
Yau, C. H., Bajaj, A. K., anel Nwokah, O. D. I. (1993).Robust control of a chaotic vibratory system. Int. 1.Bifurcation and Chao.s, 3(4): 1075-1081.
66 SBA Controle & Automação jVol.7 no. 1jJan., Fev., Mar. e Abril 1996