A Test of CPT and Lorentz Symmetry Using a K-3He Co...
224
A Test of CPT and Lorentz Symmetry Using a K- 3 He Co-magnetometer Thomas Whitmore Kornack A DISSERTATION PRESENTED TO THE FACULTY OF PRINCETON UNIVERSITY IN CANDIDACY FOR THE DEGREE OF DOCTOR OF PHILOSOPHY RECOMMENDED FOR ACCEPTANCE BY THE DEPARTMENT OF ASTROPHYSICAL SCIENCES NOVEMBER, 2005
Transcript of A Test of CPT and Lorentz Symmetry Using a K-3He Co...

A Test of CPT and Lorentz Symmetry
Using a K-3He Co-magnetometer
Thomas Whitmore Kornack
A DISSERTATION
PRESENTED TO THE FACULTY
OF PRINCETON UNIVERSITY
IN CANDIDACY FOR THE DEGREE
OF DOCTOR OF PHILOSOPHY
RECOMMENDED FOR ACCEPTANCE
BY THE DEPARTMENT OF
ASTROPHYSICAL SCIENCES
NOVEMBER, 2005

c© Copyright 2005 by Thomas Whitmore Kornack.
All rights reserved.

Abstract
A K-3He co-magnetometer has been developed for a test of Lorentz and CPT sym-
metry. Polarized K vapor forms a spin-exchange relaxation-free (SERF) magneto-
meter that has record sensitivity of about 1 fT/√
Hz. The polarized 3He effectively
suppresses sensitivity to the magnetic fields and gradients. Together, the K-3He co-
magnetometer retains sensitivity to anomalous, CPT- and Lorentz-violating fields
that couple to electron and nuclear spins differently than a normal magnetic field.
Data over the course of 15 months provide upper limits on the coupling energy
of a CPT-violating field to neutron spin, bn < 1.4 × 10−31 GeV, to proton spin,
bp < 4.4× 10−30 GeV, and to electron spin, be < 1.0× 10−28 GeV. These limits are
consistent with the existing limits of bn < 1.1× 10−31 GeV (Bear et al., 2002) and
be < 3.0× 10−29 GeV (Heckel et al., 2000). The proton sensitivity is better than the
published limit of bp < 1.8× 10−27 GeV (Phillips et al., 2001). The long-term sen-
sitivity of the co-magnetometer was significantly limited by sources of systematic
noise.
The co-magnetometer provides a robust platform for precision measurements
primarily due to its inherent insensitivity to magnetic field drift and field gradients.
Detailed analytic and numerical modeling of the coupled spin ensemble dynamics
provides good agreement with steady state and transient response measurements.
iii

Elaborate procedures have been developed for running the system optimally and
minimizing the magnetic fields and lightshifts in the system.
The co-magnetometer also forms a sensitive gyroscope that inherits all the mag-
netic insensitivity features of the co-magnetometer and adds insensitivity to mag-
netic field fast transients. The sensitivity of this gyroscope is competitive with
existing compact gyroscope techniques.
iv

Dedicated to Jill Foley

Acknowledgments
First I’d like to thank my advisor Michael Romalis for providing me with this won-
derful opportunity. Mike’s enthusiasm for this work is infectious and his commit-
ment to finding the answers to these fundamental questions is inspiring. I am also
grateful for his hands-on style, nearly constant availability, and patience with my
development. I would not have been able to finish this dissertation in such a short
amount of time without his prompt reading. I also appreciate the efforts of my care-
ful readers Ernie Valeo and Will Happer, who suggested important improvements.
I’d like to thank my dissertation committee: Will Happer, Stewart Zweben, who
tirelessly answered my questions in his diagnostics classes, and John Krommes,
who taught an excellent and challenging class on irreversible processes.
There are many people who have directly helped me in this work: Ioannis Komi-
nis was a joy to work with on the initial magnetometer sensitivity measurements.
Igor Savukov has always been available and eager to discuss the finer points of
atomic theory and greatly helped with the first major renovation of the experiment.
Rajat Ghosh built most of the additions for the gyroscope measurements, which
worked very well on the first try. Saee Paliwal built a very useful wavelength feed-
back box. Tom Jackson wrote what turned out to be an absolutely essential viewing
program for the data.
vi

Mike Souza patiently made and re-made the spherical glass cells that were of
critical importance to the experiment. Charles Sule fabricated absolutely bomb-
proof, space-ready electronics. Dan Hoffman was a constant companion and was
always was free to help when help was most needed, especially with last-minute
machining. I am indebted to Mike Peloso for maintaining a most awesome, acces-
sible and efficient student machine shop. I also deeply appreciate all the pieces
made by Bill Dix, Laszlo Varga, Glenn Atkinson, Ted Lewis and everyone else
in the machine shop. Mary DeLorenzo, Ellen Webster, Claude Champagne and
Kathy Warren provided fantastic and friendly administrative and purchasing sup-
port. This work would not have been possible without the support from NASA,
NSF, a NIST Precision Measurement grant, and The Packard Foundation.
I could not have asked for a better officemate than Micah Ledbetter, who was
both a good friend and colleague. The same is true for Scott Seltzer, who has been
very supportive and helpful while I have been writing. I benefited tremendously
from the faithful companionship of Luis Delgado-Aparicio during our long studies
for the plasma physics general exams. I also deeply appreciate the support of the
prelims study group: Juan Burwell, Jack Laiho, Wei-Li Lee and Ben North.
Everyone in plasma physics has been extremely supportive. I am grateful
for the continuous support from Nat Fisch and the program in plasma physics.
Phil Efthimion offered tireless encouragement and guidance while I was finishing.
Sam Cohen was an inspiring, excellent teacher and oversaw a wonderful first-year
project. Barbara Sarfaty has been very supportive and helpful throughout my time
here and clearly worked hard to make sure that I never had to worry about admin-
istrative details.
vii

My love of physics was developed with the physics faculty at Swarthmore Col-
lege: John Boccio, Tom Donnelly, Peter Collings, Frank Moscatelli, Amy Bug and
others held me to very high standards. In particular, working with Michael Brown
on spheromak plasmas was an incredible experience that cemented my trajectory
into graduate school.
My interests in physics started with John Peterson in 7th grade science class and
continued with excellent teaching by Kathy Sweeney-Hammond, David Walker
and Jennifer Groppe. Jennifer, in particular, ran the Engineering Team, which I
loved, and the skills that I learned would become useful later in building physics
experiments. My general interest in academia became much deeper during an
amazing history class by Leonard King.
I’d like to thank my parents Mom and Dad for being so loving and supportive
of my interests throughout the years. They tirelessly encouraged me, enabled me
and gave me the confidence to pursue my dreams.
Though I met Jill Foley as a fellow student and lab mate, she has become so
much more to me and I am filled with joy that we will wed shortly hereafter. For
her trusted advice on all things, both in physics and on other aspects of life, for
providing healthy, tasty sustenance, and especially for her limitless, loving support
throughout this work, I dedicate this thesis to her.
viii

Contents
Abstract iii
Acknowledgments vi
1 Introduction 1
1.1 Lorentz Symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 The CPT Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Spontaneous symmetry breaking . . . . . . . . . . . . . . . . . . . . . 10
1.4 Experimental tests of Lorentz and CPT symmetry . . . . . . . . . . . 14
1.5 High sensitivity magnetometers . . . . . . . . . . . . . . . . . . . . . . 16
1.6 Dissertation structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 Co-magnetometer theory 19
2.1 Alkali Metal Optical Pumping . . . . . . . . . . . . . . . . . . . . . . . 20
2.1.1 Pressure broadening . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.2 Light propagation . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2 The K magnetometer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 Spin-exchange collisions . . . . . . . . . . . . . . . . . . . . . . 29
ix

2.2.2 Spin destruction collisions . . . . . . . . . . . . . . . . . . . . . 32
2.2.3 Spin-exchange efficiency . . . . . . . . . . . . . . . . . . . . . . 34
2.2.4 Spin diffusion relaxation . . . . . . . . . . . . . . . . . . . . . . 34
2.2.5 Total K relaxation . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2.6 Magnetometer bandwidth . . . . . . . . . . . . . . . . . . . . . 37
2.2.7 Fundamental magnetometer sensitivity . . . . . . . . . . . . . 38
2.3 Optical Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.4 Lightshifts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.5 Noble gas optical pumping . . . . . . . . . . . . . . . . . . . . . . . . 53
2.6 Coupled spin ensembles . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.6.1 Transient response dynamics . . . . . . . . . . . . . . . . . . . 60
2.6.2 Oscillatory response dynamics . . . . . . . . . . . . . . . . . . 63
2.7 Steady state signal dependence . . . . . . . . . . . . . . . . . . . . . . 64
2.7.1 Steady state signal dependence refinements . . . . . . . . . . 66
2.7.2 Anomalous field dependence . . . . . . . . . . . . . . . . . . . 68
2.7.3 Rotation dependence . . . . . . . . . . . . . . . . . . . . . . . . 69
2.7.4 First order experimental imperfections . . . . . . . . . . . . . 70
2.7.5 Second order experimental imperfections . . . . . . . . . . . . 71
2.7.6 Signal pumping intensity dependence . . . . . . . . . . . . . . 76
3 Co-magnetometer implementation 78
3.1 Co-magnetometer setup . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.1.1 The pump laser . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.1.2 The probe laser . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.1.3 Probe beam steering optics . . . . . . . . . . . . . . . . . . . . 88
x

3.2 Co-magnetometer characterization . . . . . . . . . . . . . . . . . . . . 92
3.2.1 The potassium magnetometer . . . . . . . . . . . . . . . . . . . 92
3.2.2 Coupled spin ensembles . . . . . . . . . . . . . . . . . . . . . . 97
3.2.3 Intensity dependence . . . . . . . . . . . . . . . . . . . . . . . 108
3.2.4 Nonlinear dynamics . . . . . . . . . . . . . . . . . . . . . . . . 109
3.2.5 Relaxation rate measurement . . . . . . . . . . . . . . . . . . . 110
3.3 Zeroing fields and lightshifts . . . . . . . . . . . . . . . . . . . . . . . 112
3.3.1 Zeroing Bz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
3.3.2 Calibrating the magnetometer . . . . . . . . . . . . . . . . . . 117
3.3.3 Zeroing By . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
3.3.4 Zeroing Bx . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
3.3.5 Zeroing lightshifts . . . . . . . . . . . . . . . . . . . . . . . . . 122
3.3.6 Zeroing the pump-probe nonorthogonality . . . . . . . . . . . 127
3.3.7 Zeroing sequence . . . . . . . . . . . . . . . . . . . . . . . . . . 131
3.3.8 Anomalous field dependence . . . . . . . . . . . . . . . . . . . 132
4 Signal analysis and systematic effects 134
4.1 Signal acquisition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
4.1.1 Background subtraction . . . . . . . . . . . . . . . . . . . . . . 135
4.1.2 Zeroing schedule . . . . . . . . . . . . . . . . . . . . . . . . . . 138
4.2 Systematic Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
4.2.1 Systematic effects with implemented controls . . . . . . . . . 141
4.2.2 Unresolved systematic effects . . . . . . . . . . . . . . . . . . . 145
4.2.3 Thermal sensitivity . . . . . . . . . . . . . . . . . . . . . . . . . 151
4.2.4 Systematic noise compensation . . . . . . . . . . . . . . . . . . 158
xi

4.2.5 Systematic error estimation . . . . . . . . . . . . . . . . . . . . 163
4.3 Anomalous field measurement . . . . . . . . . . . . . . . . . . . . . . 166
4.3.1 Sidereal amplitudes . . . . . . . . . . . . . . . . . . . . . . . . 167
4.3.2 Long term data analysis . . . . . . . . . . . . . . . . . . . . . . 171
4.4 Anomalous coupling energy and conversions . . . . . . . . . . . . . . 175
5 The co-magnetometer gyroscope 183
6 Conclusions 192
A Time and orientation conventions 195
Bibliography 199
xii

List of Figures
1.1 Solar system with anomalous field . . . . . . . . . . . . . . . . . . . . 14
2.1 Alkali magnetometer principle of operation . . . . . . . . . . . . . . . 19
2.2 Potassium level diagram with spin-orbit and magnetic structure . . . 21
2.3 Potassium level diagram illustrating optical pumping . . . . . . . . . 22
2.4 Potassium vapor linewidth measurements . . . . . . . . . . . . . . . . 25
2.5 Pump beam propagation and potassium polarization . . . . . . . . . 27
2.6 Alkali-alkali spin-exchange collisions . . . . . . . . . . . . . . . . . . 30
2.7 Hyperfine sublevel distributions . . . . . . . . . . . . . . . . . . . . . 31
2.8 Spin relaxation rate optimization . . . . . . . . . . . . . . . . . . . . . 36
2.9 Potassium level diagrams for D1 and D2 transitions . . . . . . . . . . 43
2.10 Optical rotation angle of the probe beam . . . . . . . . . . . . . . . . . 44
2.11 Probe beam spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.12 Pump beam lightshift . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.13 Probe beam pumping rate and lightshift . . . . . . . . . . . . . . . . . 52
2.14 Illustration of a K-3He spin-exchange collision . . . . . . . . . . . . . 54
2.15 Time dependent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.16 Co-magnetometer field compensation illustration . . . . . . . . . . . 65
xiii

2.17 Signal response to Bx, By and Bz scans . . . . . . . . . . . . . . . . . . 72
2.18 Signal dependence on lightshifts . . . . . . . . . . . . . . . . . . . . . 74
2.19 Intensity dependence of various parameters . . . . . . . . . . . . . . . 76
3.1 Experimental setup schematic . . . . . . . . . . . . . . . . . . . . . . . 80
3.2 Pictures of the cell, oven and cooling shield . . . . . . . . . . . . . . . 81
3.3 Pictures of the magnetic and thermal shields . . . . . . . . . . . . . . 82
3.4 Cell optics beam deviation . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.5 Cell optics raytracing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.6 Probe beam lens configuration . . . . . . . . . . . . . . . . . . . . . . 89
3.7 Transverse resonance linewidth at 30 Hz synchronous pumping . . . 92
3.8 Transverse resonance linewidths for a range of frequencies . . . . . . 93
3.9 Potassium magnetometer noise . . . . . . . . . . . . . . . . . . . . . . 94
3.10 Magnetic field imaging and source location . . . . . . . . . . . . . . . 96
3.11 Potassium magnetometer bandwidth . . . . . . . . . . . . . . . . . . . 97
3.12 Uncoupled 3He T2 measurement . . . . . . . . . . . . . . . . . . . . . 98
3.13 Potassium polarization saturation curve . . . . . . . . . . . . . . . . . 99
3.14 Coupled spin ensembles transient response dynamics . . . . . . . . . 100
3.15 Coupled spin ensembles transient response dynamics, expanded . . 101
3.16 Coupled spin ensembles frequency and decay rate . . . . . . . . . . . 103
3.17 Co-magnetometer frequency response . . . . . . . . . . . . . . . . . . 104
3.18 Suppression of applied magnetic fields . . . . . . . . . . . . . . . . . . 105
3.19 Suppression of an external applied magnetic field . . . . . . . . . . . 106
3.20 Suppression of applied magnetic field gradients . . . . . . . . . . . . 106
3.21 Suppression of magnetic noise . . . . . . . . . . . . . . . . . . . . . . 107
xiv

3.22 Pump intensity profile with propagation model . . . . . . . . . . . . 108
3.23 Nonlinear response to a large tipping angle pulse . . . . . . . . . . . 109
3.24 Nonlinear spontaneous spin response to field reversal . . . . . . . . . 110
3.25 Determination of the co-magnetometer K spin destruction rate . . . . 111
3.26 Zeroing procedure example showing modulated raw signal . . . . . 113
3.27 Zeroing procedure example modulation response curve . . . . . . . . 114
3.28 Zeroing procedure for Bz . . . . . . . . . . . . . . . . . . . . . . . . . . 115
3.29 Single transient response simulation . . . . . . . . . . . . . . . . . . . 116
3.30 Zeroing procedure for By . . . . . . . . . . . . . . . . . . . . . . . . . . 119
3.31 Zeroing procedure for Bx . . . . . . . . . . . . . . . . . . . . . . . . . . 120
3.32 Signal response curves for zeroing-relevant modulations . . . . . . . 121
3.33 Signal response to Bz scans with no pump beam . . . . . . . . . . . . 125
3.34 Zeroing procedure for Lx . . . . . . . . . . . . . . . . . . . . . . . . . . 126
3.35 Zeroing procedure for pump-probe non-orthogonality . . . . . . . . 128
3.36 Magnetometer and misalignment sensitivities . . . . . . . . . . . . . 130
4.1 Raw data, second timescale . . . . . . . . . . . . . . . . . . . . . . . . 137
4.2 Raw data with zeroing gaps, minute timescale . . . . . . . . . . . . . 138
4.3 Raw data with zeroing gaps, hour timescale . . . . . . . . . . . . . . . 140
4.4 Cell wall dichroism and sweet spot illustration . . . . . . . . . . . . . 142
4.5 Vertical lightshift generated by back-reflection . . . . . . . . . . . . . 146
4.6 Relative sensitivity gradient through cell . . . . . . . . . . . . . . . . 148
4.7 Signal-temperature correlation example . . . . . . . . . . . . . . . . . 151
4.8 Thermal disequilibriation examples . . . . . . . . . . . . . . . . . . . 153
4.9 Signal-temperature correlation improvement . . . . . . . . . . . . . . 155
xv

4.10 Thermal expansion of table flap . . . . . . . . . . . . . . . . . . . . . . 156
4.11 Signal-pump position correlation example . . . . . . . . . . . . . . . . 159
4.12 Signal-probe position correlation example . . . . . . . . . . . . . . . . 160
4.13 Signal-pressure correlation and jump removal . . . . . . . . . . . . . 161
4.14 Smooth quadratic drift example . . . . . . . . . . . . . . . . . . . . . . 162
4.15 Measured systematic errors . . . . . . . . . . . . . . . . . . . . . . . . 164
4.16 Sidereal fit to a single data run . . . . . . . . . . . . . . . . . . . . . . 167
4.17 Long term frequency spectrum sample . . . . . . . . . . . . . . . . . . 169
4.18 Raw data over one year . . . . . . . . . . . . . . . . . . . . . . . . . . 170
4.19 Summary of data runs . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
4.20 Summary of days . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
4.21 RMS cutoff dependence . . . . . . . . . . . . . . . . . . . . . . . . . . 176
4.22 Histogram of day sidereal amplitudes . . . . . . . . . . . . . . . . . . 177
4.23 Error analysis integral . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
5.1 Gyroscope experiment setup . . . . . . . . . . . . . . . . . . . . . . . . 184
5.2 Gyroscope experiment setup front view . . . . . . . . . . . . . . . . . 184
5.3 Gyroscope raw rotation signal . . . . . . . . . . . . . . . . . . . . . . . 185
5.4 Gyroscope noise spectrum . . . . . . . . . . . . . . . . . . . . . . . . . 186
5.5 Gyroscope angle random walk . . . . . . . . . . . . . . . . . . . . . . 187
5.6 Co-magnetometer transient insensitivity . . . . . . . . . . . . . . . . . 188
A.1 Celestial coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
xvi

List of Tables
1.1 CPT transformation of electromagnetic fields . . . . . . . . . . . . . . 7
1.2 CPT transformation of Dirac fields . . . . . . . . . . . . . . . . . . . . 8
1.3 Existing limits on CPT violation parameters . . . . . . . . . . . . . . . 15
2.1 Alkali-metal spin-destruction cross sections . . . . . . . . . . . . . . . 33
2.2 Summary of timescales . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.3 Typical experimental parameters . . . . . . . . . . . . . . . . . . . . . 67
4.1 Spin polarization reversal times . . . . . . . . . . . . . . . . . . . . . . 144
4.2 Survey of thermal sensitivity around the pump beam . . . . . . . . . 154
4.3 Survey of other thermal sensitivities . . . . . . . . . . . . . . . . . . . 158
4.4 Measured systematic errors . . . . . . . . . . . . . . . . . . . . . . . . 165
5.1 Gyroscope performance comparison . . . . . . . . . . . . . . . . . . . 190
xvii

Chapter 1
Introduction
GENERAL RELATIVITY AND QUANTUM THEORY have successfully led phys-
ics through most of the last century. General Relativity describes the behav-
ior of gravitation, space and time while Quantum Theory covers all of the other,
much stronger interactions in Nature. The success of this dichotomous system re-
lies on the vast differences in scale between the two theories; no experiment or
observation has ever probed Quantum Gravity, where both theories are simulta-
neously significant. The quest for a unification of Quantum Theory and General
Relativity in a theory of Quantum Gravity is primarily motivated by the notion
that Nature is a single entity.
For many decades, the experimental search for a signature of Quantum Grav-
ity was dismissed by the simplistic argument that gravitational effects would ap-
pear only at the experimentally unattainable Planck scale ∼ 1019 GeV. However,
in recent years, efforts to determine the measurable consequences of Quantum
1

2
Gravity have considerably intensified. In the mid-1980s two moderately success-
ful theories of Quantum Gravity were proposed: String Theory (Green et al., 1987)
and Loop Quantum Gravity (Rovelli, 1997). Not long afterward, Kostelecky and
Samuel (1989) showed that String Theory can lead to a spontaneous breakdown of
Lorentz and CPT symmetries in the Standard Model. CPT symmetry is closely re-
lated to Lorentz symmetry; it is a discrete symmetry of physical systems in which
a system is invariant upon charge conjugation (C), parity inversion (P), and time
reversal (T). Lorentz violation is not entirely unexpected, however, since almost
every other symmetry of Nature including charge, parity, time-reversal, CP sym-
metry, chiral symmetry, Supersymmetry, etc. has been found to be spontaneously
broken.
Most theories of Quantum Gravity have now been shown to violate Lorentz
symmetry in some way. Both Loop Quantum Gravity (Gambini and Pullin, 1999)
and String Theory (Ellis et al., 2001) have generally been shown to produce a mod-
ified dispersion relation for particle propagation that necessarily leads to Lorentz
symmetry breaking. The modifications stem from a discrete description of space-
time and typically cause photons with different energies to travel with different
velocities, v(E) 6= c, introducing small delays that would become detectable on
cosmological scales (Sudarsky et al., 2002). Such a modified dispersion relation
must be evaluated in a single, preferred reference frame, which clearly violates
Lorentz symmetry.
Conveniently, there is a preferred reference frame available: the frame at rest
with respect to the Cosmic Microwave Background. Other cosmological observa-
tions have also spurred interest in the possible violation of Lorentz symmetry: the

3
WMAP satellite and other cosmological observations have recently confirmed that
a majority of the energy in the universe consists of dark energy. Dark energy can
be associated with either a cosmological constant or a fifth “infrared” degree of
freedom that gives rise to a scalar field in a preferred frame, sometimes known as
quintessence (Bolokhov et al., 2005). This very low energy scalar field background
not only affects the expansion of the universe but may also interact with particles
in such a way that Lorentz-violating effects would appear.
It remains an open and compelling question whether an unambiguous sign of
Lorentz violation can be measured using present experimental techniques. The
experiment described in this dissertation searches for CPT- and Lorentz-violating
effects that are clearly forbidden by the Standard Model but may be allowed by a
more fundamental theory. In particular, this experiment compares the spin preces-
sion of electron and nuclear spins while the earth rotates in order to search for an
anomalous coupling along a particular preferred direction in spacetime. In search-
ing for a sort of New Aether wind, this experiment is a modern analogue of the
original Michelson-Morley experiment.
In general, there are many possible ways to search for Lorentz violation, in-
cluding (1) the violation of rotational symmetry (Aether), (2) the violation of boost
invariance, (3) anomalous dispersion in the vacuum, (4) violation of discrete sym-
metries such as CPT symmetry, and (5) the occurrence of forbidden processes
(Vucetich, 2005). There are currently two successful methods of experimentally

1.1. Lorentz Symmetry 4
testing Lorentz symmetry with sufficient sensitivity: astrophysical or cosmologi-
cal observations and “clock-comparison” experiments similar to the present exper-
iment. A null result from this experiment applies only to a narrow subset of pos-
sible Lorentz violation mechanisms; only in conjunction with many other types of
experiments and observations can the search for Lorentz violation be considered
thorough.
1.1 Lorentz Symmetry
Lorentz symmetry states that the physics of any system is symmetric through ro-
tations and boosts of the laboratory. The Lorentz group is formed by the set of
matrices that conserve the following spacetime quantity:
Invariant: s2 = c2t2 − x2i = x2
0 − x2i = xµgµνxν (1.1)
If all the terms in a particular theory are chosen from the Lorentz group, then the
theory is automatically Lorentz invariant. For such a Lorentz-invariant physical
system, transformations of both the observer and the system itself do not change
the physics of the system. An observer Lorentz transformation can be expressed
using the matrix Λµν for rotations and boosts and the vector aµ for translations:
x′µ = Λµνxν + aµ (1.2)
where the coordinate xν transforms into x′µ. A particle Lorentz transformation is
expressed using
U(Λ, a)ψ(x)U−1(Λ, a) = ψ(Λx + a) (1.3)

1.2. The CPT Theorem 5
where U is a transformation matrix containing both rotations, boosts and transla-
tions. These two types of transformation are equivalent under Lorentz invariance.
They are, however, distinct under any form of Lorentz violation. In a system with
Lorentz violation, observer transformations preserve Lorentz symmetry while par-
ticle transformations violate Lorentz symmetry. Under a particular scheme of
Lorentz violation, particles that are moving at different velocities would experi-
ence different physics. Moreover, in any given scheme of Lorentz violation, there
is a particular preferred frame in which the equations of motion are simplified.
Thus, the presence of a preferred frame leads to experimentally measurable conse-
quences in the local laboratory frame.
1.2 The CPT Theorem
CPT symmetry depends critically on Lorentz symmetry and is an exact symmetry
of the Standard Model. Under CPT symmetry, a physical system is invariant when
the charges are flipped (C), the spatial axes are reflected (P, parity) and time is
reversed (T):
C : e → −e
P : x → −x (1.4)
T : t → −t
The total transformation is defined as Θ ≡ CPT . This section contains a brief,
utilitarian tour of CPT transformations and a sketch of a proof of the CPT theo-
rem. The material in this section draws upon more detailed presentations by Kaku
(1993) and Colladay (1998).

1.2. The CPT Theorem 6
It is instructive to consider the case of Maxwell’s equations to determine the
CPT transformation of the vector potential Aµ = (A0, A) and the source term jµ =
(ρ, j). Maxwell’s equations can be written as
∂µFµν = jν (1.5)
where
Fµν = ∂µ Aν − ∂ν Aµ =
0 E1 E2 E3
−E1 0 B3 −B2
−E2 −B3 0 B1
−E3 B2 −B1 0
(1.6)
Charge conjugation transforms a positive current into a negative one:
C jµC−1 = −jµ (1.7)
Under a parity transformation, the direction of current flow reverses (j → −j) but
the charge density stays the same:
P jµP−1 = jµ (1.8)
where the notation means jµ = (ρ,−j). Time reversal has the same effect:
T jµT −1 = jµ (1.9)
The derivative ∂µ transforms in a similarly straightforward manner:
C : ∂µ → ∂µ (1.10)
P : ∂µ → ∂µ (1.11)
T : ∂µ → −∂µ (1.12)

1.2. The CPT Theorem 7
∂µ jµ Aµ
C ∂µ −jµ −Aµ
P ∂µ jµ Aµ
T −∂µ jµ Aµ
Θ −∂µ −jµ −Aµ
Table 1.1: CPT transformation of electromagnetic fields.
The transformation of the vector potential Aµ is derived from the transformation
of the source terms and Maxwell’s equations (Equation 1.5):
C : Aµ → −Aµ (1.13)
P : Aµ → Aµ (1.14)
T : Aµ → Aµ (1.15)
A summary of these transformations can be found in Table 1.1. Each term in
Maxwell’s Equation 1.5 gains a negative sign under a CPT transformation. Since
there are an even number of these terms appearing in Maxwell’s equation, it is
invariant and symmetric under CPT transformations.
A similar but significantly more involved derivation can be used to obtain the
transformation properties of a fermion ψ interacting with various fields. Fermions
of mass m obey the Dirac equation; a Lagrangian form is
L = ψ[−m + iγµ(∂µ + ieAµ)]ψ− 14
FµνFµν (1.16)
where ψ ≡ ψ†γ0 and the spin is defined using the notation,
ψ =
ψR
ψL
where ψL ≡1− γ5
2ψ and ψR ≡
1 + γ5
2ψ (1.17)

1.2. The CPT Theorem 8
Scalar Pseudoscalar Vector Pseudovector Tensorψψ ψγ5ψ ψγµψ ψγµγ5ψ ψσµνψ
S P Vµ Bµ Tµν
C S P −Vµ −Bµ −Tµν
P S −P Vµ Bµ Tµν
T S −P Vµ Bµ −Tµν
Θ S P −Vµ −Bµ Tµν
Table 1.2: CPT transformation of Dirac fields.
For left-handed spin-1/2 fermions, the CPT operators transform according to (see,
for example, Kaku (1993))
CψL(x, t)C−1 = iηCγ2γ0ψ†R(x, t) (1.18)
PψL(x, t)P−1 = ηPγ0ψR(−x, t) (1.19)
T ψL(x, t)T −1 = iηTγ1γ3ψL(x,−t) (1.20)
ΘψL(x, t)Θ−1 = −iηCPTγ5γ0ψ†L(−x,−t) (1.21)
where the identity γ0γ1γ2γ3 = −iγ5 was used. Phase factors ηC, ηP, ηT, and
ηCPT arise from these transformations. A summary of the CPT transformation of
common Dirac bilinears can be found in Table 1.2. One can verify that using these
constructions, the Lagrangian in Equation 1.16 is indeed CPT invariant.
In general, any given Dirac bilinear can be represented by
O = ψΓψ where Γ = I, γµ, σµν, γ5 (1.22)
and Γ forms a complete basis set. Testing O for CPT symmetry can be generalized
according to
ΘOΘ−1 = (−1)kη1η2O†(−x) (1.23)

1.2. The CPT Theorem 9
where k denotes the number of Lorentz indices (µ, ν) that appear in O. These sign
factors arise from the anticommutation of fermionic spinors. Phase factors η1,2
correspond to the CPT phase of fermion fields ψ1,2. Since the CPT operator Θ has
no eigenstates, the CPT phases are unobservable and can be set to unity (Colladay,
1998).
The treatment of bosons is somewhat more straightforward since the boson
fields commute; a bosonic field transforms by
ΘBµ(x)Θ−1 = (−1)kBµ(−x) (1.24)
Each of k gauge bosons in a Lagrangian term contributes a factor of −1 to the CPT-
transformed term. As with the fermions, this factor is equivalent to the number of
Lorentz indices appearing in each term.
The transformation of the total Lagrangian can thus be summarized according
to
ΘL(x)Θ−1 = (−1)kL†(−x) (1.25)
Now, two essential features of the Lagrangian are utilized: First, imposing Lorentz
covariance of the Lagrangian requires that even rank tensors transform into their
Hermitian conjugate while odd-rank tensors transform into the negative of their
Hermitian conjugate. In other words, all of the Lorentz indices must appear in
pairs and for a total of k Lorentz indices, (−1)k = 1. Second, the Lagrangian is
assumed to be hermitian; thus L†(x) = L(x). Under these conditions,
ΘL(x)Θ−1 = L(−x) (1.26)
As long as the Lagrangian is translationally invariant, the CPT-transformed L(−x)
is equivalent to the physics of L(x).

1.3. Spontaneous symmetry breaking 10
To complete the proof of CPT symmetry one must show that the action in the
Hamiltonian is also invariant. This proof is found in many texts such as Kaku
(1993). Invariance of the action requires the imposition of the usual spin-statistics
connection for bosons and fermions. That, together with a Hermitian, Lorentz-
invariant Lagrangian forms the core of the CPT theorem.
1.3 Spontaneous symmetry breaking
Theories of Quantum Gravity often lead to a spontaneous breakdown of Lorentz
and CPT symmetries. New fields can be added to the Standard Model Lagrangian
to account for the symmetry breaking. The particular type of fields that appear
depend strongly on the form of the fundamental theory.
The theoretical framework presented by Alan Kostelecky and colleagues pa-
rameterizes CPT and Lorentz violation effects in a Standard Model Extension. The
parameters are chosen to include all 4-dimensional terms that break Lorentz in-
variance for particles in the Standard Model. The following terms appear in the
Lagrangian for Dirac particles such as electrons (Colladay and Kostelecky, 1998):
L = −ψMψ +12
iψΓµ∂µψ (1.27)
where Γµ and M are given by
M = m + aµγµ + bµγ5γµ − 12
Hµνσµν (1.28)
Γµ = γµ + cµνγν + dµνγ5γν + eµ + i fµγ5 +12
igλνµσλν (1.29)
These alphabetical vector and tensor terms are constants that define the orienta-
tion in spacetime of the spontaneous symmetry breaking. The terms aµ, bµ, eµ, fµ,

1.3. Spontaneous symmetry breaking 11
and gλνµ are CPT-odd (they violate CPT symmetry) whereas the rest are CPT-even.
This can be readily verified using the results in Table 1.2. This parameterization of
Lorentz violation terms in a Standard Model Extension provides a standard frame-
work necessary to directly compare theoretical and experimental results. There
are other frameworks such as the one proposed by Myers and Pospelov (2004) that
accommodate up to dimension-5 Lorentz violation terms in the Lagrangian. The
latter becomes particularly useful for parameterizing certain modified dispersion
relations (Nibbelink and Pospelov, 2005).
The present experiment is sensitive to fields that couple to spins. For non-
relativistic electrons, the experiment couples to the following Lorentz violation
terms:
V = −bµψγ5γµψ = −bei σi
e = −be · S (1.30)
where an anomalous coupling to the electron be is given by the following combina-
tion of terms:
bei = be
i −medei0 − εijkHe
jk/2 (1.31)
Thus, Lorentz and CPT violation terms give rise to a vector field b that couples
to spins in the same way as a magnetic field. This anomalous field b points in a
fixed direction in spacetime. By carefully measuring the torque on spins as they
are rotated relative to a fixed axis, one is able to measure the Lorentz and CPT
violation terms in Equation 1.31.
The spontaneous symmetry breaking that is parameterized by the Standard
Model extension can be constrained by considering the attributes of specific fun-
damental theories. Although all of the Lorentz violation parameters aµ, bµ, cµν,
dµν, eν, fν, gλµν ... could conceivably have nonzero values, particular fundamental

1.3. Spontaneous symmetry breaking 12
theories place constraints on which of these are likely to appear. By measuring a
sufficiently wide selection of these parameters, it is possible to constrain or even
choose among possible formulations of quantum gravity.
The following two examples of specific predictions from fundamental theories
are provided to illustrate the utility of the Kostelecky parameterization. The par-
ticular details of the theories are not of great concern here; rather, the results are
presented to give a flavor of how this Standard Model Extension is useful for com-
parison.
Vucetich (2005) provides a set of predictions for parameters in the Kostelecky
framework for a Loop Quantum Gravity system with a preferred frame. For a
laboratory experiment moving with a velocity Wµ with respect to the preferred
frame in a weave state with a small structure scale `P L λ such that spacetime
appears continuous on the macroscopic scale λ, the parameters in the Kostelecky
Lagrangian take the following form:
aµ = Hµν = dµν = eµ = fµ = 0 (1.32)
bµ =12
O4M2`PWµ (1.33)
cµν = O1M`P(gµν −WµWν) (1.34)
gαβγ = O2M`PεµαβγWµ (1.35)
where Oi are factors of order unity and M is the Planck mass.
Bolokhov et al. (2005) provides a specific prediction for a Lorentz-violating Su-
persymmetric QED system in terms of an explicit parity-breaking electron-posi-
tron mass difference ∆m2 = (m+s )2 − (m−
s )2 and real-space symmetry-breaking

1.3. Spontaneous symmetry breaking 13
unit vectors NµA,V :
aµ = − 1M
m2εNµ
V +α log(M/ms)
πM
(m2
s NµV +
∆m2
2Nµ
A −32
∆m2
2Nµ
)(1.36)
bµ =α log(M/ms)
πM
(m2
s NµA +
∆m2
2Nµ
V −32
m2s Nµ
)(1.37)
cµ =1M
(12
NµA − Nµ
), dµ =
1M
NµV
2, f µνρ =
2M
Tµνρ (1.38)
where α is the electromagnetic coupling constant, M is the Planck mass, and the
soft breaking mass can be chosen ms ≈ 1 TeV.
A scalar quintessence field φ that could account for the dark energy in the uni-
verse gives rise to the following vector coupling:
bµ =∇φ
Fa(1.39)
where Fa is a coupling constant (Pospelov and Romalis, 2004).
Regardless of the actual values of the Lorentz and CPT violation parameters,
these models offer divergent predictions for the form of the symmetry breaking.
In some theories, for example, aµ is present whereas in others it is absent. An
underlying theory’s particular prediction for these parameters forms a sort of fin-
gerprint for the underlying theory. By placing limits on Lorentz and CPT violation
parameters, these and other theories can be constrained. The measurement of a
non-zero value for one of these terms would allow one to begin to accurately dis-
cern between fundamental theories.
It is noteworthy that this experiment is dominantly sensitive to bµ, a term that
appears in all the theoretical predictions above and great majority of other funda-
mental theories. Thus, even though this experiment is dominantly sensitive to that

1.4. Experimental tests of Lorentz and CPT symmetry 14
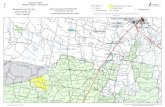
Figure 1.1: This experiment rotates through a background anomalous field bµ as it movesaround the solar system.
one term, it is apparently well suited to detect Lorentz and CPT violation irrespec-
tive of the underlying theory.
1.4 Experimental tests of Lorentz and CPT symmetry
Experimental searches for Lorentz and CPT violation focus on the coupling of var-
ious Lorentz and CPT violation parameters to particular particles. Table 1.3 shows
the limits on a few of these parameters set by existing experiments. The terms that
couple to spins such as bµ have set the most stringent limits on CPT and Lorentz vi-
olation. An essential assumption in these experiments is that the anomalous field
bµ does not necessarily couple to spins proportional to their magnetic moments.
If bµ were to couple exactly according to the magnetic moments, then it would
be indistinguishable from a magnetic field. This difference in coupling allows a
co-magnetometer that uses two different spin species to distinguish between a nor-
mal magnetic field and an anomalous field coupling. The present experiment is
designed to be sensitive to the difference in coupling of bµ to electron and nuclear

1.4. Experimental tests of Lorentz and CPT symmetry 15
Experiment aµ bpµ bn
µ beµ cn
µν CitationK0-K0 10−20 Kostelecky (1999)Electron g− 2 10−24 Gabrielse et al. (1999)p-p 10−26 Bluhm et al. (1998)Cs-199Hg 10−27 10−30 10−27 Berglund et al. (1995)H Maser 10−27 10−27 Phillips et al. (2001)Polarized Solid 10−29 Heckel et al. (2000)3He-129Xe Maser 10−31 Bear et al. (2002)K-3He 10−30 10−31 10−28 (This work)
Table 1.3: Existing limits in GeV on CPT violation parameters are provided by a widerange of tabletop and high energy experiments. The last line indicates the performance ofthe present experiment.
(mostly neutron) spins, S ∼ be − bn. The design is insensitive to a normal magnetic
field which would appear as B = beµ = bn
µ.
These anomalous vector fields point in a certain direction in spacetime that is
constant on the scale of our solar system. Many experiments measure the ampli-
tude of a sidereal signal as the earth rotates and moves around the Sun through
such a constant background anomalous field as depicted in Figure 1.1. The detec-
tion of a sidereal signal, clearly distinct from a diurnal signal, is considered an
unambiguous indication of an anomalous field.
Heckel et al. (2000) use a torsional pendulum made of spin-polarized solids
to place a stringent upper limit on the electron coupling to the anomalous field of
be < 3.0× 10−29 GeV. The key to its high sensitivity is the use of two different types
of permanent magnet: one magnet that derives its magnetic moment entirely from
electron spin polarization and another that has a component of magnetization from
orbital angular momentum. These magnets were arranged in such a way that the
total magnetic moment of the pendulum was cancelled, rendering the experiment

1.5. High sensitivity magnetometers 16
largely insensitive to magnetic fields. The pendulum retains a total electron spin
moment which couples to the anomalous field bµ.
Bear et al. (2002) use a 3He-129Xe maser to place a stringent upper limit on the
neutron coupling to the anomalous field of bn < 1.1× 10−32 GeV. They use a co-
magnetometer setup that compares the precession of the 3He and 129Xe precession
frequencies to reject magnetic field sensitivity and retain anomalous field sensitiv-
ity.
The experiment described in this dissertation forms a co-magnetometer using
the electron spins of potassium (K) and the nuclear spins of Helium-3 (3He). This K-
3He co-magnetometer is sensitive to both nuclear and electron spin coupling and
has sufficient short-term sensitivity to set a new limit. The co-magnetometer can
be operated so that it is completely insensitive to magnetic fields and only retains
sensitivity to anomalous fields. However, as this dissertation will show at length,
the long-term sensitivity of this experiment is suppressed by systematic noise.
1.5 High sensitivity magnetometers
Advances in sensitive magnetometry have enabled the high projected sensitivity
of the present experiment. The co-magnetometer in this experiment is constructed
using a spin-exchange relaxation-free (SERF) magnetometer at its core with polar-
ized 3He buffer gas. The SERF magnetometer is a new type of ultra-sensitive alkali-
metal magnetometer that was developed for use in this experiment. Traditional
alkali metal magnetometers are fundamentally limited by spin-exchange collisions
between alkali atoms. Efforts to suppress spin-exchange led to designs with large

1.6. Dissertation structure 17
cells and very low densities of alkali metal (Alexandrov et al., 1996). Budker et al.
(2000) used evacuated cells with antirelaxation coatings and a nonlinear Faraday ro-
tation technique to obtain a projected shot-noise limited sensitivity of 0.3 fT/√
Hz.
These techniques were not very competitive with SQUID magnetometers and did
not find widespread use. The best low-frequency SQUID magnetometers achieve
1 fT/√
Hz and are fundamentally limited by Johnson noise in the shunt resistors
(Greenberg, 1998).
By operating an alkali-metal magnetometer at high density and in low mag-
netic field, the spin-exchange relaxation mechanism shuts down and the more
seldom spin-destruction collisions become the dominant relaxation rate. In this
regime, the measured sensitivity of a K vapor in a few atm 4He buffer gas is bet-
ter than 1 fT/√
Hz with a shot-noise limit of 20 aT/√
Hz. The fundamental shot
noise limit of a fully optimized spin-exchange relaxation-free (SERF) magnetome-
ter is 2 aT/√
Hz, almost three orders of magnitude better than the best SQUID. The
high sensitivity of this magnetometer is the basis of the co-magnetometer’s high
sensitivity to anomalous field coupling.
1.6 Dissertation structure
The first half of Chapter 2 contains a discussion of the essential components of a
SERF magnetometer. The second half of Chapter 2 discusses the behavior of an
alkali-metal-noble-gas co-magnetometer. The signal response is derived for tran-
sients, oscillations and in steady state. These analyses indicate how to operate the
co-magnetometer optimally while running the experiment.

1.6. Dissertation structure 18
Chapter 3 starts with the experimental verification of basic properties of the
SERF magnetometer. Since the co-magnetometer is insensitive to magnetic fields
in steady state, an elaborate “zeroing” mechanism has been developed to maintain
the magnetic field and other parameters near their optimal values. The zeroing
procedures presented in Section 3.3 exploit the second order sensitivity of the co-
magnetometer to various parameters of the system.
Chapter 4 contains all the technical details about how the data is gathered and
processed in such a way that the experiment is least sensitive to systematic errors
and drift. Many sources of systematic noise and ways to suppress each one are
presented. After all possible sources of systematic noise have been removed from
the data, Section 4.3 presents the methods used to search for the sidereal signature
of anomalous fields in the long-term data sets. The anomalous field measurements
derived from long-term data sets are given in Section 4.3.
The very high rotation sensitivity of the co-magnetometer was discovered dur-
ing its development. In Chapter 5 the measurements of the gyroscopic properties
of the co-magnetometer are presented. The performance of the gyroscope is com-
petitive with existing techniques such as fiber optic interferometer-based devices.
Future development of the co-magnetometer shows great promise for a very high
sensitivity, compact gyroscope.

Chapter 2
Co-magnetometer theory
THE K-3HE CO-MAGNETOMETER can be described in two parts: first, as a sensi-
tive, spin-exchange relaxation-free K magnetometer and second as a system
of interacting K and 3He spin ensembles. The alkali metal magnetometer operates
by accurately measuring the spin precession of spin-polarized alkali metal atoms
as illustrated in Figure 2.1. This chapter begins with a review of how alkali metal
spins are polarized by optical pumping using circularly polarized resonant light
(Section 2.1). The rate at which the spins are depolarized determines the funda-
mental limit on the sensitivity of the magnetometer (Section 2.2). At sufficiently
By
S
Probe Beam
Pump Beam
Figure 2.1: Principle of alkali magnetometer operation: a pump beam polarizes alkalimetal electron spins S and their precession in By is measured by a probe beam.
19

2.1. Alkali Metal Optical Pumping 20
high density and low ambient magnetic field, spin-exchange collisions do not de-
polarize the spins and the K vapor forms a very sensitive spin-exchange relaxation-
free (SERF) magnetometer. The orientation of the spins is measured using Faraday
rotation of a linearly polarized probe beam (Section 2.3). With lasers propagating
through the atomic vapor, light-induced shifts of the energy levels (lightshifts) can
arise that are indistinguishable from a magnetic field splitting whenever the lasers
are detuned from resonance and have some circular polarization (Section 2.4).
In the second half of the chapter, 3He is introduced to create a co-magnetometer
that is sensitive to anomalous fields yet is insensitive to magnetic fields. Spin-
exchange collisions between K and 3He atoms polarize the 3He spins (Section
2.5). The polarized K and 3He spin ensembles have coupled, resonant interac-
tions under certain conditions (Section 2.6). The same conditions render the co-
magnetometer insensitive to magnetic fields in steady state (Section 2.7). Small cor-
rections to the steady state signal dependence are calculated in order to understand
the degree to which the co-magnetometer can be rendered insensitive to magnetic
fields.
2.1 Alkali Metal Optical Pumping
Alkali metals are natural choices for magnetometry because the single outer shell
electron has an unpaired spin that is easy to utilize. Using an optical pumping
technique with circularly polarized light, the atomic spins can be polarized. The
first excited state of potassium, 4p, is split by the spin-orbit interaction into the
2P1/2 and 2P3/2 states. (The superscripted number denotes the 2S + 1 multiplicity

2.1. Alkali Metal Optical Pumping 21
4s
Spin-OrbitOrbital MagneticIK = 3/2
4p2P1/2
2P3/2
2S1/2 –1/2
+1/2
–1/2
+1/2
–3/2–1/2+1/2
+3/2
mj
1
2
1
2
0123
F
D1, 770.1 nm
D2, 766.8 nm
Figure 2.2: Level splitting diagram for K showing the spin-orbit interaction splitting andthe magnetic interaction splitting of the 4s and 4p orbitals. D1 and D2 transitions corre-spond to excitation of 2P1/2 and 2P3/2 orbital angular momentum states. Not to scale.
of the state and the subscripted number denotes the j = l + s total electron angular
momentum.) D1 and D2 light denote the wavelengths necessary to excite to the
2P1/2 and 2P3/2 states, respectively. A good review of optical pumping is provided
by Walker and Happer (1997).
In pumping the D1 transition with circularly polarized light, the level diagram
can be redrawn according to Figure 2.3, with two ground state spin sublevels of
2S1/2 and two excited state sublevels of 2P1/2. The two sublevels in each state corre-
spond to the orientation of the electron spin. Starting with an unpolarized sample
of electrons in the ground state, distributed evenly between the ms = −1/2 and
ms = +1/2 sublevels of 2S1/2, a circularly polarized σ+ pumping laser will ulti-
mately place all the electrons in the ms = +1/2 sublevel: (1) The σ+ light promotes
electrons from ms = −1/2 to mj = +1/2 in the excited state. The electrons in the

2.1. Alkali Metal Optical Pumping 22
4s 2S1/2
ms = –1/2 ms = +1/2
4p 2P1/2
Collisional Mixing
Spin relaxation
s + pumping la
ser
N2 Q
uenc
hing
N2 Q
uenc
hing
ee e e ee e eee e ee ee ee
eee e
Figure 2.3: Ground and first excited states of potassium. Circularly polarized pump beamphotons excite electrons with ms = −1/2 into the 4p, mj = +1/2 state. Collisions in theK vapor cause rapid mixing among the excited states and collisions with N2 de-excite theelectron. Spin relaxation processes cause spins to become disoriented and can repopulatems = −1/2. This diagram does not include the effects of nuclear spin.
ms = +1/2 state are not excited because the 2P1/2 excited state cannot accommo-
date more angular momentum. (2) In the excited state, collisions between K atoms
and noble-gas atoms cause very rapid mixing between mj = +1/2 and mj = −1/2.
(3) Sufficient N2 is added to quench the excited electrons, removing the orbital an-
gular angular momentum by exciting N2 rotational states without disturbing the
spin orientation (Happer, 1972). Without the N2 quenching, the excited electrons
radiate nearly unpolarized light that is reabsorbed by adjacent K atoms, thereby
depumping the atoms. Of the electrons that are excited only half are deposited in
the ms = +1/2 state. Since the σ+ light only depopulates the ms = −1/2 state,
over time that state would become completely depopulated. This process can be
seen as transferring the angular momentum of photons to the angular momentum

2.1. Alkali Metal Optical Pumping 23
of electrons, thereby polarizing the electrons along the direction of light propaga-
tion.
The alkali nuclear spin is polarized because it is strongly coupled to the polar-
ized electron spin in the ground state. Since the total angular momentum F =
I + S + L is shared between electron and nuclear spins, continuous optical pump-
ing and spin-exchange collisions cause the atoms to become fully polarized in the
mF = 2 sublevel of the 2S1/2 (F = 2) ground state (in the absence of any relaxation).
In an ensemble of electrons, the polarization can be defined as the ensemble-
averaged expectation value of the orientation of the electronic spin, Pez ≡ 2〈Sz〉. For
potassium, fully polarized atoms are denoted by Pez = 〈Fz〉/2. Zero polarization
means that the spins in the ensemble are randomly oriented. Fully polarized atoms
along z are denoted by Pez = 1.
2.1.1 Pressure broadening
Noble gasses are commonly used as buffers to reduce diffusion to the walls where
spin coherence is rapidly lost. The presence of this gas broadens the spectral lines
and reduces the overall absorption of resonant light. In most cases the broadened
line shape is given by a Lorentzian:
L(ν) =Γ/2
(ν− ν0)2 + (Γ/2)2 (2.1)
where ν− ν0 is the detuning of light off resonance and Γ is the width (full width
half maximum) of the broadening. The cross section for absorption obeys the fol-
lowing sum rule (see, for example, Corney (1977)):∫σdν = πcre f (2.2)

2.1. Alkali Metal Optical Pumping 24
where re is the radius of the electron and f is the oscillator strength. The resulting
absorption cross section is
σ(ν) = cre fL(ν) (2.3)
which on resonance is simply
σ(ν0) =2cre f
Γ(2.4)
This can be used to calculate the optical depth of the vapor as long as the density
n of the vapor is also known:
OD = nσ(ν)L (2.5)
where resonant light propagates a length L through the vapor. The light becomes
attenuated according to
S = S0 exp(−nσ(ν)L) (2.6)
The density n of potassium vapor as a function of temperature is well described
using the following empirical formula proposed by Killian (1926):
nK =1026.2682−(4453 K)/T
(1 K−1)Tcm−3 (2.7)
At a typical operating temperature of about 160C the density of potassium is
found to be nK = 2.2× 1013 cm−3.
The pressure broadening of K in a He environment is Γ ' 13.2 GHz/amg (Al-
lard and Kielkopf, 1982). The density of the helium buffer gas in the cell is ex-
pressed in amagats (amg); 1 amagat = 1 atm at 25C. Figure 2.4 shows the pressure
broadening in the two cells that are used in the experiment. The He pressure in
each cell is known from the cell filling process: the amount of gas in the cell is

2.1. Alkali Metal Optical Pumping 25
0
0.5
1
1.5
Tra
nsm
itte
dS
ign
al(V
)
768.5 769 769.5 770 770.5 771 771.5
Wavelength (nm)
nK = 1.7× 1013 cm−3 , p = 7.0 amg (fixed)
nK = 4.6× 1013 cm−3 , p = 2.4 amg (fixed)
Figure 2.4: Absorption profiles showing pressure broadening for two co-magnetometercells filled with 2.4 amg and 7 amg 3He. A low intensity probe laser was tuned throughthe resonance and the transmission amplitude was measured on an arbitrary scale. Fitsusing Equation 2.6 give densities that are consistent with the density obtained knowingthe cell temperature and using Equation 2.7.
determined by measuring the pressure in the manifold before and after the cell
is pulled off. In fitting the absorption curve to Equation 2.6, the density is a free
parameter. The data for each cell was taken at different density and temperature;
the temperature of the 7.0 amg cell was 176C and the fit density implies a temper-
ature of 174C. The temperature of the 2.4 amg cell was 156C and the fit density
implies a temperature of 155C.1
Using these measurements for the 7.0 amg cell, one finds that there are 3.5 opti-
cal depths for resonant light in the 2.5 cm diameter cell. The attenuation of pump-
ing light as it propagates through the cell may be a significant issue considering
the implications of nonuniform pumping intensity and polarization in the cell.
1Note that the cell temperature is on average ∼ 4C less than the oven temperature set point,which was 180C and 160C for the 7.0 and the 2.4 amg cells, respectively.

2.1. Alkali Metal Optical Pumping 26
2.1.2 Light propagation
The propagation of intense pumping light through an alkali vapor that is almost
fully polarized is not well described by the simple decaying exponential in Equa-
tion 2.6. As electrons are polarized by the pump light and the ms = −1/2 state is
depopulated, the absorption cross section decreases and the pumping light “burns
through” to polarize more atoms deeper in the cell. The polarization of atoms is
locally given by the balance of the pumping rate Rp, which is proportional to the
pumping light, and the relaxation rate Rtot according to
Pe =Rp
Rtot'
Rp
Rp + Rsd(2.8)
The relaxation rate Rtot has several contributions that will be discussed in greater
detail in a subsequent section; for now, it is sufficient to consider the relaxation to
be dominantly the sum of the pumping rate and a fixed “spin-destruction” rate, Rsd.
The propagation of circularly polarized pumping light through the cell is governed
by the amount of polarization according to
dRp
dx= −nσ(ν0)(1− Pe)Rp (2.9)
There is no attenuation for fully polarized portions of the vapor; dRp/dx = 0 for
Pe ' 1. The solution to these equations is the principal value of the Lambert W-
function (the inverse of the function f (W) = WeW):
Rp(x) = RsdW[
Rp(0)Rsd
exp(−xnσ(ν0) +
Rp(0)Rsd
)](2.10)
The solutions for normal and high pumping rate are shown in Figure 2.5. Under
typical conditions the K pumping rate is around 100 1/s and the polarization is

2.1. Alkali Metal Optical Pumping 27
0
25
50
75
100
Po
lari
zati
on
(%)
0 0.5 1 1.5 2 2.5
Distance in Cell (cm)
20
50
100
200
5001000
Pu
mp
ing
Rate
(1/sec)
Nominal Rp ≃ 1.8Rsd
High Rp ≃ 14Rsd
Figure 2.5: At the nominal pump beam intensity, the pumping rate decreases as it prop-agates through the cell according to Equation 2.10 (solid line). The corresponding K po-larization (Equation 2.8) has a significant gradient through the cell. At sufficiently highpumping rate (dashed line), the pump beam “burns through” polarized K and creates amuch more uniform polarization.
around Pe ' 50% at the center of the cell. An effective optical depth can be gleaned
from these data; at the normal pump intensity ODeff ' 1.7, which is less than half
of the naıve calculation from Equation 2.5. Note that the polarization at high pump-
ing rate is barely attenuated on account of the pump laser almost fully polarizing
the cell. The strong polarization gradient at the nominal pumping rate is a cause
of some concern because it generates first order sensitivity to certain parameters of
the experiment. Such imperfections will be discussed in section 4.2.

2.2. The K magnetometer 28
2.2 The K magnetometer
An atomic magnetometer measures the precession of spins in a magnetic field. In
a given magnetic field, the spins will precess until they lose their coherence by, for
example, collisions with the cell wall. The signal of the magnetometer is generally
given by the ratio of the precession rate to the decoherence rate.
The precession of the atomic spins derives from the following Hamiltonian in
the presence of a magnetic field B and in the absence of collisions:
H = −2S · I− gsµBB · S + gNµNB · I (2.11)
The electron and nuclear spins interact through the I · S term. According to this
Hamiltonian, the electron and nuclear spins precess together with an angular fre-
quency
ωF=I±1/2 = ±ω0 = ±gsµBBQh
with Q = (2I + 1) (2.12)
This result is obtained for potassium atoms, with I = 3/2 and Q = 4. The two
potassium hyperfine states F = 1 and F = 2 precess in opposite directions. Q
represents a “slowing down” of the spin precession due to hyperfine coupling. It
is convenient to collect terms into a single gyromagnetic ratio γ:
ω = γB where γ = ±gsµB
Qh(2.13)
Here we have generalized Equation 2.12 using a vector representation; the plane
of precession is always perpendicular to the magnetic field.
A sensitive magnetometer is designed to allow the spins to precess coherently
with the longest possible lifetime, T2. There are several processes that destroy this

2.2. The K magnetometer 29
coherence:
Rtot =1T2
= Reese + Ren
se + Rcollisionssd + RD + Rp + Rm (2.14)
These terms are, in order, the relaxation rates due to alkali-alkali spin-exchange col-
lisions, alkali-noble gas spin-exchange collisions, spin-destruction collisions, diffu-
sion to the walls, pumping by the pump laser, and pumping by the probe laser.
The latter two pumping rates by the lasers are not fundamental and can be ad-
justed and reduced experimentally. The alkali-alkali spin-exchange term Reese is sup-
pressed at low field but modifies the precession frequency of the ensemble. The
spin-destruction and spin-diffusion relaxation rates constitute the most significant
contributions to the total relaxation and can be minimized by optimizing the com-
position of the cell (choice of alkali metal, cell temperature, buffer gas and gas
pressure). The following sections discuss each relaxation term in greater detail.
2.2.1 Spin-exchange collisions
Spin-exchange collisions between two alkali atoms preserve the total angular mo-
mentum projection mF1 + mF2 of the system but redistributes the angular momen-
tum among the hyperfine sublevels of the colliding atoms. Figure 2.6 shows how
the total angular momentum of the atom is redistributed after a collision. Tradi-
tional alkali metal magnetometers are limited by these collisions because they can
change the total angular momentum F of each atom without changing the projec-
tion mF1 + mF2 . After a spin-exchange collision the electron spins remain pointing
in the same direction but reside in different hyperfine states that precess with differ-
ent (opposite) ω. In time, the precession at different frequencies rapidly decoheres

2.2. The K magnetometer 30
KK
rr
|2,1〉 |2,1〉-2
mF
F = 1
F = 2-1 0 1 2
-1 0 1
mF
-2
F = 1
F = 2-1 0 1 2
-1 0 1
-2 -1 0 1 2
-1 0 1
-2 -1 0 1 2
-1 0 1
Figure 2.6: Spin-exchange collisions between alkali metal atoms. The total angular mo-mentum projection mF1 + mF2 is conserved but the individual mF level populations areredistributed. Adapted from Walker and Happer (1997).
and relaxes the system. Thus, the relaxation rate due to spin-exchange collisions
in a traditional atomic magnetometer is simply given by Reese ' 1/Tse where Tse is
the time between spin-exchange collisions.
For the past few decades spin-exchange interactions were considered the funda-
mental limiting factor in alkali metal magnetometers. However, Happer and Tang
(1973) discovered that at sufficiently low magnetic field and high spin exchange
rate such that Rse γB, this relaxation mechanism shuts down. Under these con-
ditions, each atom in the ensemble experiences spin-exchange collisions and hops
between hyperfine states F = 1 and F = 2, for which the precession frequencies are
−ω0 and +ω0, respectively. The atom precesses an infinitesimal amount between
collisions but has a net positive precession because F = 2 has higher statistical
weight (it has more sublevels) than F = 1. The advantage of operating in this
regime is that the atoms precess coherently albeit at a lower rate,
ω0 =gsµBB
Qhwith Q = 1 +
I(I + 1)S(S + 1)
(2.15)

2.2. The K magnetometer 31
-2
mF
w = -w0
w = +w0-1 0 1 2
-1 0 1
-2
mF
F = 1
F = 2-1 0 1 2
-1 0 1
-2
mF
-1 0 1 2
-1 0 1
Unpolarized, Q = 6 Partially Polarized, Q ~ 5 Polarized, Q = 4
Figure 2.7: Equilibrium hyperfine sublevel distributions for unpolarized, partially polar-ized and fully polarized ensembles of K atoms in the regime of strong spin-exchange.The partially polarized distribution is the steady-state “spin-temperature” solution thatis achieved after many spin-exchange collisions.
Since the precession is coherent, spin-exchange collisions no longer produce relax-
ation. For potassium, Q = 6, representing a further “slowing down” relative to
Equation 2.12 due to hopping between hyperfine levels. The value of Q depends
on the polarization of the ensemble, ranging from Q = 6 at low polarization to
the traditional Q = 4 from Equation 2.12 at high polarization. In a fully polarized
ensemble, spin-exchange collisions have no effect because all of the atoms reside
in the maximum angular momentum sublevel m f = 2 of the F = 2 hyperfine state
and F = 1 cannot accommodate that amount of angular momentum. The distribu-
tion of atoms among the hyperfine sublevels is illustrated in Figure 2.7. A partially
polarized ensemble achieves an equilibrium “spin-temperature” distribution (An-
derson et al., 1959) for which the slowing down factor is between the unpolarized
and fully polarized cases. Savukov and Romalis (2005) provide a simple expres-
sion for the dependence of Q on polarization:
Q(Pe) = 4(
2− 43 + Pe2
)−1
(2.16)

2.2. The K magnetometer 32
For typical polarization Pe ' 60%, one finds Q(Pe) ' 4.9. In the presence of
polarization gradients, atoms precess at different frequencies at different locations
in the cell.
In this regime of strong spin-exchange, the spin-exchange relaxation rate has
only a second order dependence on magnetic field that vanishes at zero field:
Reese = ω2
0TseQ2 − (2I + 1)2
2(2.17)
If ω0 Tse then the transverse relaxation time due to spin-exchange is much
longer than the time between spin-exchange collisions Tse. For typical conditions,
the spin-exchange rate is 1/Tse = 30, 000 1/s, which is much faster than the preces-
sion frequency of 0.44 1/s in 1 µG. A magnetometer utilizing this effect was first
presented in Allred et al. (2002); much of the data in that paper appears in this the-
sis. The suppression of spin-exchange relaxation in this manner is the key to the
high sensitivity of this magnetometer; magnetometers with these characteristics
are frequently called spin-exchange relaxation-free or SERF magnetometers.
2.2.2 Spin destruction collisions
In the absence of spin-exchange relaxation, spin destruction interactions between
potassium and the other elements in the cell become the dominant relaxation mech-
anisms. For this magnetometer, the contributions are
Rcollisionssd = σsd
HevnHe + σsdN2
vnN2 + σsdK vnK (2.18)

2.2. The K magnetometer 33
Alkali metal σsdSelf σsd
He σsdNe σsd
N2
K 1× 10−18 cm2 8× 10−25 cm2 1× 10−23 cm2 —Rb 9× 10−18 cm2 9× 10−24 cm2 — 1× 10−22 cm2
Cs 2× 10−16 cm2 3× 10−23 cm2 — 6× 10−22 cm2
Table 2.1: Alkali-metal spin-destruction cross sections reprinted from Allred et al. (2002).
In these interactions, the K electron spin is disoriented after collisions with K, N2
or He. The polarized spin angular momentum is ultimately converted to the trans-
lational or rotational degrees of freedom of the system. “Spin destruction” is some-
thing of a misnomer; spin rotation and spin disorientation also refer to these effects
in the literature.
Potassium was chosen among the alkali metals for the co-magnetometer be-
cause it has a lower spin-destruction cross section with the He buffer gas. Spin-
destruction cross-sections for various combinations of alkali metal and relevant
gasses can be found in Table 2.1. According to these cross sections, the spin-destr-
uction rates in a magnetometer with 7 amg 4He, 50 torr N2 at 160C are
Rensd = σsd
HevnHe = 29 1/s (2.19)
RK-N2sd = σsd
N2vnN2 = 0.1 1/s (2.20)
RK-Ksd = σsd
K vnK = 10 1/s (2.21)
The total of these spin-destruction rates is Rcollisionssd = 39 1/s.

2.2. The K magnetometer 34
2.2.3 Spin-exchange efficiency
In the co-magnetometer, the K atoms experience both spin-destruction and spin-
exchange collisions with the 3He buffer gas. Spin-exchange collisions transfer po-
larization between K atomic spin and 3He nuclear spin. It is useful to define the
alkali-metal-noble-gas spin-exchange efficiency η:
η ≡ Rense
Rense + Ren
sd(2.22)
corresponding to the fraction of the K-3He collisions that are spin-exchange colli-
sions. Baranga et al. (1998) measured η = 0.756− (0.00109 K−1)T for the K-3He
system. Although the spin-exchange efficiency drops slightly with increasing tem-
perature, the total spin exchange rate increases with increasing temperature and
potassium density. At the typical operating temperature of T = 160C, one finds
η = 0.28. This property can be used to determine the K spin-exchange rate Rense
knowing the spin-destruction rate Rensd of the K system:
Rense = Ren
sdη
1− η' 15 1/s (2.23)
where the result is obtained using the total spin-destruction rate from Equation
2.20. Since it is easy to measure the total relaxation rate of the potassium in the co-
magnetometer, it will be possible to use η to learn what fraction of the potassium
relaxation rate is spin-exchange relaxation.
2.2.4 Spin diffusion relaxation
The relaxation due to diffusion was modeled in Allred et al. (2002) assuming that
the K electron and nuclear spins completely depolarize on contact with the cell

2.2. The K magnetometer 35
walls. The diffusion constant for K in 3He buffer gas is (Franz and Volk, 1982)
DK-3He = 0.35 cm2/s
(√1 + T/(273.15 K)
pn/(1 amg)
)= 0.08 cm2/s (2.24)
where the result is for typical co-magnetometer conditions (7 amg 3He at 160C).
The diffusion rate of potassium atoms to the walls is approximated using the fun-
damental classical diffusion mode in spherical cell of radius a:
RD = Q(Pe)DK-3He
(π
a
)2= 2.5 1/s (2.25)
where a is the radius of the cell and the enhancement factor Q(Pe) accounts for the
destruction of both electron and nuclear spin polarizations at the cell wall.
2.2.5 Total K relaxation
The most significant contributions to the total potassium relaxation rate in the co-
magnetometer are
Resd = Ren
se + Rcollisionssd + RD ' 57 1/s (2.26)
At zero field, the K-K spin-exchange relaxation is negligible. The probe pumping
rate can be rendered negligible by running with very low intensity and at large
detuning.
In the pure K magnetometer using 4He instead of 3He, the noble-gas spin-exch-
ange term disappears, leaving just diffusion and spin destruction. Helium buffer
gas (4He) is added to reduce diffusion to the walls until the relaxation due to wall
diffusion is balanced by spin-destruction collisions with the buffer gas. In that
balance is the minimum total spin relaxation. The relaxation rate as a function

2.2. The K magnetometer 36
40
60
80
100
Rel
axat
ion
rate
RK−
He
sd(1
/s)
0 2 4 6 8 10
Buffer gas pressure (amg)
1
1.5
2
2.5
3
Lin
ewid
thR
K−
He
sd/
Q(P
e)(H
z)
T = 160C
T = 170C
Figure 2.8: Spin relaxation rate for a K magnetometer as a function of He buffer gas pres-sure.
of buffer gas pressure for a K magnetometer is plotted in Figure 2.8. In this case,
the optimum K magnetometer is created using 2 amg of buffer gas for which the
relaxation rate is
RK-Hesd = Rcollisions
sd + RD ' 30 1/s (2.27)
The relaxation rate is often quoted as RK-Hesd /[2πQ(Pe)] = 1.2 Hz, where Q(Pe) is
used to account for the relaxation of both the electron and nuclear spins. This very
low relaxation rate is an essential part of an ultra-sensitive magnetometer.

2.2. The K magnetometer 37
2.2.6 Magnetometer bandwidth
The bandwidth of the magnetometer can be determined from a simplified set of
Bloch equations for the spin dynamics. If all the magnetic fields are properly ze-
roed, then the Bloch equations can be expressed as
dPex
dt=(+γeByPe
z − RtotPex) 1
Q(Pe)(2.28)
dPez
dt=(−γeByPe
x − RtotPez + Rp
) 1Q(Pe)
(2.29)
To the right of the equal signs, the first term causes spin precession in a magnetic
field By, the second term represents the spin relaxation rate and the third term
polarizes the atoms along z at the pumping rate Rp. Imposing an oscillating field
By = B0 exp(−iωt), one obtains
Pex =
Pez γeB0
Q(Pe)1
Rtot/Q(Pe)− iω(2.30)
S ≡ <(Pex) =
Pez γeB0
Q(Pe)2Rtot
[Rtot/Q(Pe)]2 + ω2 (2.31)
where the signal S is sensitive to the x projection of the polarization via optical
rotation of a probe beam. The bandwidth of the magnetometer has a Lorentzian
profile with half-width Rtot/Q(Pe) centered on zero frequency. This analysis can be
carried out in a similar fashion for a magnetometer in finite field (typically driven
by a synchronous pumping technique). One can move to the rotating frame and
retrieve a Lorentzian profile with nonzero frequency offset:
S =Pe
z γeB0
Q(Pe)2Rtot
[Rtot/Q(Pe)]2 + (ω−ω0)2 (2.32)

2.2. The K magnetometer 38
where ω0 is the frequency of the spin precession in the ambient magnetic field. On
resonance, ω0 = ω (or at very low frequency in zero field), the signal simplifies to
S =PeγeB0
Rtot(2.33)
A calibration constant κ is measured so that the magnetometer measures the ap-
plied field accurately; B0 = κS. The actual angle that spins achieve is
θ ' Px
Pez
=γeB0
Rtot' 2× 10−6 rad (2.34)
where the result is obtained for B0 = 10 fT and Rtot = 200 1/s. This very small
angle requires the very high precision detection scheme described in Sections 2.3
and 3.1.2.
2.2.7 Fundamental magnetometer sensitivity
Fundamentally, the magnetometer sensitivity is limited by the shot noise of the
atomic vapor that is being measured. The derivation in this section appears in
extremely abbreviated form in Savukov et al. (2005). The total angular momentum
F is governed by the uncertainty principle according to
δFxδFy ≥|Fz|
2(2.35)
where the angular momentum operators commute by [Fx, Fy] = iFz. Since the
states are not entangled or squeezed, the uncertainty in the transverse angular
momentum projections are equal; δFx = δFy. For an ensemble of N atoms, let
Fi → NFi and the uncertainty in the transverse component becomes
δFx =
√Fz
N(2.36)

2.2. The K magnetometer 39
In the magnetometer, probe beam photons make measurements of the spin com-
ponent Fx. If repeated measurements of a particular atom happen faster than the
relaxation time T2, then the measurements will be correlated and the measurement
is not improved. Gardner (1977, Equation 8.34) provides an expression for the
uncertainty in the measurement of Fx after continuous measurement for a time t:(〈δFx〉δFx
)2
=2t
∫ t
0(1− τ/t)K(τ)dτ (2.37)
where the spin time-correlation function is given by the relaxation time T2:
K(τ) = exp(−τ/T2) (2.38)
Since this experiment is primarily concerned with long term measurements, one
can take t T2 and perform this integral for t → ∞:
〈δFx〉 = δFx
√2T2
t(2.39)
To place this in terms of magnetic field sensitivity, use Equation 2.33, which can be
rewritten with S → Fx/2 and Pe → Fz/2 as
〈δFx〉 =〈δB〉γeFz
Rtot(2.40)
Although fully polarized potassium atoms are in the Fz = 2 hyperfine state, maxi-
mum sensitivity is found for lower pumping rates where the polarization is around
Pe ' 0.5 and Fz ' 1. The relaxation rate is identified as 1/T2 = Rtot/Q(Pe), where
the slowing down factor Q(Pe) accounts for the depolarization of both the elec-
tron and nuclear spins. Combining Equations 2.36, 2.39, and 2.40 and solving for
magnetic field, one obtains
δB =1γe
√2RtotQ(Pe)
FzNt(2.41)

2.3. Optical Rotation 40
The total number of atoms involved in the measurement, N = nV, reduces the
noise level according to√
N, as expected according to Poisson statistics. A probe
laser is used to measure spin precession using optical rotation (see next Section).
To achieve this noise limit, the probe laser must have sufficient photons such that
in a time T2 at least one photon interacts with each atom.
2.3 Optical Rotation
The average angle of the alkali metal spin is measured using optical rotation of a
linearly polarized probe beam. Linearly polarized, off-resonant light will experi-
ence rotation of the polarization axis as it propagates through a polarized medium
for which positive and negative helicity light experience different indices of refrac-
tion, n+(ω) and n−(ω), respectively. This section loosely follows the semi-classical
approach originally set forth by Mort et al. (1965) and refined by Erickson (2000).
First one must establish an expression for how much linearly polarized light is
rotated in a medium with n+(ω) 6= n−(ω). Start with the propagation of linearly
polarized light:
E(z = 0) =E0
2eiωty + c. c. =
E0
4eiωt [(y + ix) + (y− ix)] + c. c. (2.42)
where c. c. denotes the complex conjugate and in the last step the light was put
in terms of right- and left- circularly polarized components. (The terms positive
helicity, right-circular polarization and σ+ are used interchangeably throughout
this text.) A time t later, the fields will have propagated a distance l = tc/n(ω)
and the electric fields will become
E(z = l) =E0
4eiωln+(ω)/c(y + ix) +
E0
4eiωln−(ω)/c(y− ix) + c. c. (2.43)

2.3. Optical Rotation 41
It is useful to define the quantities
n(ω) = [n+(ω) + n−(ω)]/2 (2.44)
∆n(ω) = [n+(ω)− n−(ω)] (2.45)
One can now rewrite Equation 2.43 as
E(z = l) =E0
4eiωln(ω)/ceiωl∆n(ω)/c(y + ix) (2.46)
+E0
4eiωln(ω)/ce−iωl∆n(ω)/c(y− ix) + c. c. (2.47)
Ignoring the common phase factor due to n and defining the rotation angle,
θ =ωl2c<[n+(ω)− n−(ω)] (2.48)
the electric field becomes
E(z = l) = E0(y cos θ − x sin θ) (2.49)
This clearly shows that the polarization angle of light is rotated as it propagates
through a medium with n+(ω) 6= n−(ω).
The Kramers-Kronig relations allow one to derive the real part of the index of
refraction from the imaginary part. A derivation of the Kramers-Kronig relations
can be found in many texts such as Jackson (1998). The imaginary parts of the
refractive index are easily obtained by measuring the absorption of resonant light
propagating through the atomic vapor. To this end, the data in Figure 2.4 verified
that our alkali vapor is well described using a pressure-broadened, Lorentzian ab-
sorption profile. Converting Equation 2.3 to angular units, the cross section for
absorption is
σ(ω) = 2πcre fL(ω) where L(ω) ≡ γ/2(ω−ω0)2 + (γ/2)2 (2.50)

2.3. Optical Rotation 42
and where ω and γ are the angular versions of ν and Γ. Note that∫L(ω)dω = π.
The absorption coefficient α is defined as the characteristic decay length of the
intensity of decaying plane waves; I ∼ E2 ∼ E0e−2ωlni(ω)/c (note the factor of
two) where ni(ω) is the imaginary component of the index of refraction n(ω) =
nr(ω) + ini(ω). One can equate the absorption coefficient to the absorption cross
section simply using
a =2ωni(ω)
c= nσ(ω) (2.51)
where n is the number density in units of particles per volume. Here one must
be careful not to confuse the index of refraction ni(ω), nr(ω) with the density n.
Solving for ni(ω),
ni(ω) =πnc2re f
ωL(ω) (2.52)
It will be convenient to express the index of refraction in terms of the electrical sus-
ceptibility χe(ω). The electrical susceptibility, permittivity and index are related
by ε(ω) = χe(ω) + 1 = n2(ω). One can expand χe(ω) in terms of n(ω) since
[nr(ω)− 1] 1 and ni(ω) 1 are small:
χe(ω) = 2[nr(ω)− 1] + i2ni(ω) (2.53)
Since χe(ω) is a physical quantity that obeys causality in its temporal evolution,
one can employ the Kramers-Kronig relations to obtain expressions for the real
parts of χe(ω) and n(ω):
χr(ω) = − 1π
P∫ ∞
−∞
χi(ω1)ω−ω1
dω1 (2.54)
The solution to the principal value integral of a Lorentzian has a standard disper-
sion shape:
− 1π
P∫ ∞
−∞
L(ω1)ω−ω1
dω1 = D(ω), where D(ω) ≡ ω−ω0
(ω−ω0)2 + (γ/2)2 (2.55)

2.3. Optical Rotation 43
4s 2S1/2 ms = –1/2 ms = +1/2
4p 2P1/2
D1 Transition
D2 Transition
s + s–
11
4s 2S1/2 ms = –1/2 ms = +1/2
mj = –1/2mj = –3/2 mj = +3/2mj = +1/2
mj = –1/2 mj = +1/2
4p 2P3/2
s + s–
11
s–
3
s +
3
Figure 2.9: Level diagrams for K showing D1 and D2 transitions. Circled numbers indicatethe transition amplitudes.
The resulting real component of the index of refraction is
nr(ω)− 1 =πnc2re f
ωD(ω) (2.56)
Thus, the real part of the index of refraction was obtained with knowledge of the
imaginary part and by imposing causality through the Kramers-Kronig relations.
The specific indices of refraction for right- and left-circularly polarized light
interacting with the D1 transition can be obtained with small adjustments to Equa-
tion 2.56. Let Px = ρ+ − ρ− be the polarization of the alkali vapor, where ρ± is the
population of the ms = ±1/2 state. One can split the index of refraction into left-

2.3. Optical Rotation 44
−1
0
1
Sig
nal
(arb
.)
766 767 768 769 770 771
Wavelength (nm)
−4
−2
0
2
4
Ro
tati
on
An
gle
(rad
)
0.01
1
100O
pti
cal
Dep
th
p3He = 7 atm, T = 160 C
p3He = 2 atm, T = 170 C
Figure 2.10: The probe beam experiences optical rotation according to Equation 2.62 as itpasses through a typical 2.5 cm diameter cell with Px = 1. The top figure shows the opticaldepth of the probe light, which increases significantly around the D1 and D2 resonances.The middle plot shows the optical rotation angle experienced by probe beam photons. Thebottom plot shows the projected signal obtained by the product of the light transmissionand the rotation angle; near the resonances, the absorption of light attenuates the rotationsignal.

2.3. Optical Rotation 45
and right-circularly polarized components acting on half the population:
n+(ω)− 1 = ρ−2πnc2re fD1
ωDD1(ω) (2.57)
n−(ω)− 1 = ρ+2πnc2re fD1
ωDD1(ω) (2.58)
where due to selection rules σ± light can only interact with ρ∓. For unpolarized
atoms, ρ+ = ρ− = 1/2 and one retrieves n = n+ = n−. Finally, one can substitute
these expressions into Equation 2.48 to obtain a rotation angle of
θ = −12
lrec fD1nPxDD1(ν) (2.59)
The D2 transition is only slightly complicated by having more transitions that are
weighted by different amplitudes:
n+(ω)− 1 =
(ρ−Am=− 1
2→+ 12+ ρ+Am=+ 1
2→+ 32
Am=− 12→+ 1
2+Am=+ 1
2→+ 32
)2
πnc2re fD2
ωDD2(ω) (2.60)
n−(ω)− 1 =
(ρ+Am=+ 1
2→−12+ ρ−Am=− 1
2→−32
Am=+ 12→−
12+Am=− 1
2→−32
)2
πnc2re fD2
ωDD2(ω) (2.61)
where again one retrieves n = n+ = n− for ρ+ = ρ− = 1/2. Using the transition
amplitudes found in Figure 2.9 and noting that fD1 = fD2/2 = 1/3, the total angle
of rotation is equal in magnitude but opposite in sign to the rotation around the
D1 transition. In sum, the total rotation angle is
θ =12
lrec fD1nPx[−DD1(ν) +DD2(ν)] (2.62)
Optical rotation for typical parameters is plotted in Figure 2.10. Although maxi-
mum rotation is achieved within ∼ 0.1 nm of the resonance, the probe beam is
typically operated at 769.5 nm, between D1 and D2 where the signal has a small
first order dependence on wavelength. Away from resonance, fluctuations in the
wavelength do not cause significant fluctuations in the rotation signal.

2.4. Lightshifts 46
2.4 Lightshifts
When off-resonant, circularly-polarized light propagates through an atomic vapor,
the vapor can experience a Zeeman lightshift that makes the atoms respond as
though they were in a magnetic field pointing along the propagation of the laser. In
a sensitive magnetometer, this effect can be quite significant. This section contains
a semi-classical derivation of this effect following previous work by Appelt et al.
(1998) and Happer and Mathur (1967).
One seeks to determine the energy shift of atoms in a light field. This energy
shift can be expressed as a frequency shift or as an effective magnetic field. As with
the above derivation of optical rotation, knowledge of the absorption profile leads
to a complex polarizability, which can then be run through the Kramers-Kronig re-
lations to obtain the real part of the polarizability. The real part of the polarizability
gives energy shifts in the electric field of the light.
Consider a plane wave propagating through an alkali vapor for which the elec-
tric field is
E(z, t) =E0
2ei(kz−ωt) + c. c. (2.63)
Postulate that the propagation is governed by the wave equation:
dEdz
= 2πikn〈α〉E (2.64)
where the dielectric polarization tensor α is dependent on the average electron spin
orientation 〈S〉 of the alkali vapor and is given by
α = α(1− 2iS×) (2.65)

2.4. Lightshifts 47
Although it may not be immediately clear that this formulation is correct, one can
build trust in it by obtaining several sensible results along the way to deriving the
lightshift.
The first way to see that this expression is valid is to retrieve optical rotation
from the propagation of linearly polarized light. Substituting the polarizability,
Equation 2.65, into the wave equation, Equation 2.64, one obtains
dEx
dz= −(2πknαPz)Ey (2.66)
dEy
dz= +(2πknαPz)Ex (2.67)
where Pz = 2〈Sz〉. This represents optical rotation of the polarization that is pro-
portional to the polarization of the alkali vapor. For an appropriate choice of k and
α, this expression can be made to match the result derived in the previous section.
As light propagates through alkali vapor, the wave electric field induces an
oscillating electric dipole moment 〈p〉 = 〈α〉E. This interaction has an energy
δH = −p · E = −E∗ · αE = δE − ih2
δΓ (2.68)
where δE is the change in energy that leads to a lightshift and δΓ is the energy
associated with the absorption of the light. Find expressions for the real and imag-
inary parts of the polarizability α by equating the mean change in this energy,
d(δH)/dt = iωδH, with the absorption of optical power as follows:
−iωE∗ · αE + c. c. = 〈σα〉hνΦ(ν)/A (2.69)
where∫
Φ(ν) = P/hν is the total photon flux for a beam of power P incident upon
an area A and 〈σα〉 is the ensemble-average absorption cross section. Simplifying

2.4. Lightshifts 48
the left hand side,
E∗ · αE = E∗ · α(1− 2i〈S〉×)E (2.70)
= α(E∗ · E− 2iE · 〈S〉 × E) (2.71)
Circularly polarized light can be compactly expressed using
s =E∗ × E
iE2 (2.72)
where s is the photon spin. Rewriting Equation 2.71 using s and the identity E∗ ·
(〈S〉 × E) = −(E∗ × E) · 〈S〉, one finds
E∗ · αE = αE2(1− 2s · 〈S〉) (2.73)
Inserting this result into Equation 2.69,
〈σα〉hνΦ(ν)/A = −iωαE2(1− 2s · 〈S〉) + c. c. (2.74)
〈σα〉hνΦ(ν)/A = −i4πναE2(1− 2s · 〈S〉) (2.75)
〈σα〉 = σ(ν)(1− 2s · 〈S〉) (2.76)
where the absorption cross section is defined using the imaginary part of the polar-
izability,
σ(ν) =4παiE2A
hΦ(ν)= cre[ fD1LD1(ν) + fD2LD2(ν)] (2.77)
Note that L(ν) has the same Lorentzian form found in Equation 2.50, although this
instance does not use angular units. Now it is possible to solve for the complex
polarizability,
αi =hΦ(ν)σ(ν)
4πAE2 (2.78)

2.4. Lightshifts 49
0
0.5
1
1.5
Tra
nsm
itte
dS
ign
al(V
)
−500 0 500 1000 1500 2000
Frequency (MHz)
Fit σ = 23 MHz
Figure 2.11: The probe beam linewidth as measured by a 10 cm long, 1.5 GHz FSR Fabry-Perot cavity. In these data, imperfections in the alignment of the cavity are likely limitingthe resolution of the linewidth.
The imaginary part of the polarizability can be used to directly solve for the light
absorption operator δΓ from Equation 2.68 using the imaginary part of Equation
2.73:
δΓ = Rp(1− 2s · S), where Rp =∫ Φ(ν)σ(ν)
Adν (2.79)
is the pumping rate. This expression demonstrates correctly that the D1 absorption
is zero when the electrons are fully polarized (Sz = 1/2) along the helicity of the
pumping light (sz = 1). For D2 light, one must make the substitution 〈S〉 →
−〈S〉/2 everywhere in this analysis according to the D2 transition amplitudes that
were calculated explicitly in Equation 2.61.
To calculate the pumping rate, one must first find an expression for the photon
flux. In general, the photon flux from a single mode laser can be expressed as
Φ(ν) =Phν
(e(ν−νp)2/2∆ν2
p
∆νp√
2π
)(2.80)

2.4. Lightshifts 50
where the line shape is Gaussian with a half-width ∆νp. The linewidth of the probe
laser is measured in Figure 2.11 and the single mode pump beam is assumed to
have similar properties. As seen in Figure 2.4, the line broadening of K in 7 amg
3He is Γ = 13.2 GHz/amg × 7 amg = 91 GHz is sufficiently larger than the single
mode diode linewidths of the pump and probe beams that one can approximate
the diode line as a delta function:
Φ(ν) = Φ0δ(ν− νp) where Φ0 =Phν
(2.81)
where νp is the frequency of the laser. Using this expression for the photon flux the
pumping rate becomes
Rp =Φ0cre f
A
(Γ/2
(Γ/2)2 + (νp − ν0)2
)→ 2Pcre f
hν0AΓ(2.82)
Where in the last step the pump beam was tuned to the center of the resonance,
νp → ν0. For a pumping power of 1 mW over an area 2.5 cm2, one obtains a
pumping rate of 190 1/s.
The lightshift δE is obtained using the real part of Equation 2.73:
δE = −αrE2(1− 2s · S) (2.83)
The polarizability is a physical quantity that permits the use of the Kramers-Kro-
nig relations to obtain an expression for the real part of the polarizability from the
known imaginary part:
αr(ν) = − 1π
P∫ ∞
−∞
αi(ν1)ν− ν1
dν1 (2.84)
The lightshift becomes
δE = −hΦ(ν)cre f4πA
(1− 2s · S)(− 1
πP∫ ∞
−∞
L(ν1)ν− ν1
dν1
)(2.85)
= − hΦ(ν)cre f2A
(1− 2s · S)D(ν) (2.86)

2.4. Lightshifts 51
−20
−10
0
10
20
Lig
ht
Sh
ift
(µG
)
766 767 768 769 770 771
Wavelength (nm)
p3He = 7 atm, T = 160 C
p3He = 2 atm, T = 170 C
Figure 2.12: The lightshift according to Equation 2.88 for the pump beam at the typicalpumping rate of 180 1/s. The pump beam is operated at the zero crossing for the D1resonance at 770.1 nm to minimize the lightshift and maximize the pumping rate.
Finally, if one considers the energy shift as due to a magnetic-like field, 2µBL · S =
δE , then one obtains a lightshift:
L = −Φ(ν)cre fγe A
D(ν)s (2.87)
where γe ' 2µB/h. The constant energy term that gives rise to the scalar light shift
has been ignored. For D2 light, one must make the substitution 〈S〉 → −〈S〉/2
according to Equation 2.61 and let fD2 = 2 fD1. The total lightshift becomes
L =Φ(ν)cre fD1
γe A[−DD1(ν) +DD2(ν)]s (2.88)
Thus, the lightshift is a product of light’s degree of circular polarization and de-
tuning from resonance. The magnitude of the pump beam lightshift for typical
parameters can be found in Figure 2.12. The pump beam lightshift is minimized
by tuning the pump beam directly onto the resonance where the lightshift has a
zero crossing. The probe beam lightshift is shown in Figure 2.13 and is minimized
by operating the probe beam with minimum circular polarization.

2.4. Lightshifts 52
−50
−25
0
25
50
Lig
ht
Sh
ift
(nG
)
766 767 768 769 770 771
Wavelength (nm)
−0.004
−0.002
0
0.002
0.004
Po
lari
zati
on
Px
p3He = 7 atm, T = 160 C
p3He = 2 atm, T = 170 C
Figure 2.13: The probe beam is operated close to 769.5 nm, indicated here by the verticalline. For a probe pumping rate of 7 1/s and a circular polarization on the order of 0.005πretardation (1 V control voltage) gives the polarization Pe
x ' 8 × 10−6 and the lightshift3.7 nG. At the operating point the lightshift is suppressed by having no probe circularpolarization and has a very small first order dependence on wavelength drift.

2.5. Noble gas optical pumping 53
Small fluctuations in the wavelength of the pump beam generate significant
amounts of lightshift. Around resonance, the light shift is
dLdλ
= − 4Pre fD1chAγeΓ2λ
(2.89)
For the pump beam wavelength drifting on the order of a few picometers (pm)
around zero lightshift, the dependence is dLz/dλ = −1.4 µG/pm. By comparison,
the probe beam is less sensitive, generating only dLx/dλ = 3.0 pG/pm because of
its lower power, off-resonant wavelength and small ∼ 0.5% circular polarization.
Lightshifts behave exactly like magnetic fields while using a completely sepa-
rate mechanism to do so. The near field effect of the light propagating through
the vapor modifies the energies of the electronic states in a way that exactly mir-
rors a magnetic field. The interaction between the propagating light is not through
absorption but rather through the exchange of virtual photons. Polarized alkali
atoms precess due to a lightshift in the same way as in a magnetic field; the atoms
are subject to the slowing-down factor Q(Pe). In the co-magnetometer, a vertical
lightshift can be used to verify that the experiment retains sensitivity to an anoma-
lous field; a lightshift can be represented as an anomalous field with bn = 0 and
be = L.
2.5 Noble gas optical pumping
A co-magnetometer is formed using the polarized electrons of the K atoms and
the polarized nuclei of 3He atoms. The noble gas nuclear spin is polarized by spin-
exchange collisions with polarized K as depicted by Figure 2.14. For K-3He , these
collisions are dominantly binary collisions wherein the total angular momentum of

2.5. Noble gas optical pumping 54
3He
3He
K
K
Figure 2.14: K-3He spin-exchange collisions preserve total angular momentum.
the system is conserved while the angular momenta of each atom can be exchanged
(Walker and Happer, 1997).
The equilibrium polarization of 3He is governed by the balance of the spin-
exchange polarization rate Rnese and the relaxation rate 1/Tn
1 :
Pn = Pe Rnese
Rnese + 1/Tn
1(2.90)
The spin-exchange rate experienced by 3He, Rnese , is proportional to the spin ex-
change rate experienced by the potassium, Rense , according to the ratio of their den-
sities:
Rnese = Ren
sene
nn' 1
150 hours(2.91)
This result is obtained using the value for Rense in Equation 2.23. Since there are
many more 3He buffer gas atoms than K atoms, the spin-exchange rate experienced
by 3He is much lower than the spin-exchange rate experienced by K.
In practice, the 3He polarization is ∼ 1% and is primarily limited by the relax-
ation due to diffusion of the polarized noble gas across magnetic field gradients.

2.5. Noble gas optical pumping 55
The diffusion constant for 3He is taken to be
D3He = 1.2 cm2/s
(√1 + T/(273.15 K)
pn/(1 amg)
)' 0.28 cm2/s (2.92)
where the result is obtained for typical conditions (7 amg 3He at 160C). For a per-
fectly spherical, uniformly polarized cell volume, the field everywhere inside the
sphere is uniform. However, any asphericity in the cell creates first and higher
order gradients in the magnetic field. Spins precessing at different rates in a field
gradient across the cell decohere over time. The spin polarization relaxes as these
decoherent spins diffuse across the cell. Schearer and Walters (1965) originally
showed and Cates et al. (1988) confirmed that for sufficiently high buffer gas pres-
sures, the relaxation rate due to field inhomogeneities is
1Tn
1= D3He
|∇B⊥|2B2
z' 1
1 hour(2.93)
where ∇B⊥ is the gradient of the magnetic field transverse to the total field direc-
tion along z. The result is obtained for ∇B⊥ ∼ 70 µG/cm and B0 ∼ 2.2 mG. Since
the diffusion time in the co-magnetometer (a2/D3He ' 6 s) is much faster than
the nuclear spin relaxation rate Tn1 , the polarization of the nuclear spins is uniform
throughout the cell; the only source of field gradients must come from external
sources or the asphericity of the cell. It is likely that the largest source of asymme-
try in the cell is the cell pull-off stem, though this effect is mitigated by plugging
the stem with a drop of potassium metal.
The decay rate for transverse excitations of 3He spins due to diffusion across
gradients is1
Tn2
=8a4γ2
n|∇Bz|2175D3He
' 1210 s
(2.94)

2.6. Coupled spin ensembles 56
where a is the cell radius, gamma is the gyromagnetic ratio for 3He and ∇Bz ∼
5 µG/cm corresponds to the gradient in the field along the field direction.
Collisions between 3He atoms can also depolarize the ensemble. Newbury et al.
(1993) gives the dipolar relaxation rate:
1Tnn
1=
n3He744 amg
hour−1 ' 1106 hours
(2.95)
where n3He ' 7 amg is the density of 3He in amagats. In this experiment, dipolar
relaxation is much less significant than relaxation due to diffusion through gradi-
ents.
Having accounted for the 3He spin exchange and spin relaxation rates, the po-
larization of the nuclear spin is calculated to be:
Pn =(
1 +1
Rnese Tn
1
)Pe ' (3.9%)Pe (2.96)
For typical K polarization Pe ' 50%, the 3He polarization is about Pn ' 2%.
2.6 Coupled spin ensembles
The K-3He co-magnetometer exhibits striking coupled dynamics due to spin-ex-
change interactions. The co-magnetometer cell contains ensembles of polarized K
and 3He spins that are coupled to one another by both by dipolar field interactions
and by their spin-exchange contact interaction. The effective interaction field ex-
perienced by each spin species can be expressed as the field due to a uniformly
magnetized sphere of the other species,
B = λMP =8πκ0µ0
3MP (2.97)

2.6. Coupled spin ensembles 57
Parameter Variable Typical ValueK-K spin-exchange rate Ree
se 30000 1/sK total relaxation rate Rtot = Ree
se + Rense + Re
sd + Rp + Rm 396 1/sK pumping rate Rp 100 1/sK total spin-destruction rate Re
sd = Rense + Rcollisions
sd + RD 57 1/sK collisional spin-destruction rate Rcollisions
sd = Rensd + RK-K
sd + RK-N2sd 39 1/s
3He precession frequency γnBc 33 1/s (5.2 Hz)K-3He spin-destruction rate Ren
sd = σsdHevnHe 29 1/s
K-3He spin-exchange rate Rense 15 1/s
K-K spin-destruction rate RK-Ksd = σsd
K vnK 10 1/sK probe beam pumping rate Rm 5 1/sK wall relaxation RD 2.5 1/sK-N2 spin-destruction rate RK-N2
sd = σsdN2
vnN2 10 s3He diffusion relaxation time Tn
2 ' 1/Rntot 210 s
3He diffusion relaxation time Tn1 1 hour
3He dipolar relaxation time Tnn2 106 hours
3He -K spin-exchange time 1/Rnese 150 hours
Table 2.2: Summary of expected co-magnetometer timescales.
where the κ0 is a spin-exchange enhancement factor due to the overlap of the K
electron wavefunction and the 3He nucleus. At a temperature of 170C, κ0 = 5.9
for K-3He spin-exchange (Baranga et al., 1998). The magnetization density M corre-
sponds to a fully polarized sample with atoms of magnetic moment µ and density
n:
M = µn (2.98)
Since the magnetometer cell is nearly spherical, the spin ensembles have negligible
self-interaction. The magnetic moments of the potassium and 3He are:
Potassium: µB = 9.274 009× 10−24 J/T =eh
2me(2.99)
Helium-3: µ3He = 1.074 552× 10−26 J/T = −1.158× 10−3µB (2.100)

2.6. Coupled spin ensembles 58
For the alkali atoms, the magnetic moment is dominanted by the electron mag-
netic moment. The magnetic fields generated by the spin ensembles for typical
conditions are
Potassium: B(Me) ' 5 µG (2.101)
Helium-3: B(Mn) ' 2.2 mG (2.102)
Although the magnetic moment of the 3He is much smaller than the K moment,
the 3He magnetization is much larger than the K magnetization due to the high
density of the 3He gas.
The 3He and K spin ensembles are coupled through their magnetizations; the
3He precesses in the K field and the K precesses in the 3He field. The behavior
of the coupled spin ensembles can be robustly approximated by a set of Bloch
equations that couple the K ensemble polarization Pe with the 3He ensemble polar-
ization Pn:
∂Pe
∂t=
γe
Q(Pe)(B + λMnPn + L + be)× Pe + Ω× Pe
+ (Rpsp + Rense Pn + Rmsm − RtotPe)/Q(Pe)
∂Pn
∂t= γn(B + λMePe + bn)× Pn + Ω× Pn
+ Rnese (Pe − Pn)− Rn
totPn (2.103)
In order, terms in these equations are described as follows: Each spin species pre-
cesses in the sum of the ambient magnetic field B and the effective field due to
the polarization of the other species, λMP. Electron spins additionally precess in
a lightshift L and an anomalous field be. The spins experience non-inertial rota-
tion according to the rotation Ω of the surrounding system. The second line of

2.6. Coupled spin ensembles 59
each equation contains the various pumping and relaxation rates. The electrons
relax at a rate Rtot = Resd + Ren
se + Rp + Rm. For a circularly polarized pump laser,
sp = 1 and the electron spins polarize according to (sp − Pe)Rp (including the con-
tribution from PeRtot). The electrons exchange spin polarization with 3He nuclei
according to (Pn − Pe)Rense ; this term usually depletes the K polarization, although
the 3He can polarize the K if Pn > Pe when the pump beam is shut off and the K po-
larization is low. The probe beam can pump K according to Rm(sm − Pe) whenever
the probe beam has some circular polarization sm 6= 0; this term is only significant
when the pump beam is off. The terms in the 3He evolution are a subset of the
those found in the K evolution. The 3He experiences a different anomalous field
coupling bn, does not experience any lightshift and the polarization is defined by
the balance of the spin-exchange pumping rate Rnese and the relaxation rate Rn
tot.
In the absence of interactions, the K and 3He spin ensembles precess according
to their gyromagnetic ratios:
ωe =γe
Q(Pe)=
gµB
hQ(Pe)=
2π × 2.8 MHz/GQ(Pe)
(2.104)
ωn = γn =µ3He
h= 2π × 3.244 kHz/G (2.105)
and decay according to their respective T2 times, which is ∼ 140 ms for K (due
to spin-destruction; see Equation 2.26) and ∼ 3 hours for 3He (due to diffusion;
see Equation 2.94). Dramatic and useful coupled dynamics arise, however, when
the spins are coupled such that each species precesses around the magnetization
of the other species. Transient, oscillatory and steady state solutions for the co-
magnetometer signal are carefully studied in the following sections.

2.6. Coupled spin ensembles 60
2.6.1 Transient response dynamics
The time evolution of the coupled spin ensembles can be solved analytically with
somewhat simplified Bloch equations (Kornack and Romalis, 2002). Retaining only
the electron-nuclear coupling terms and a single relaxation term, the Bloch equa-
tions become
∂Pe
∂t=
γe
Q(Pe)(B + λMnPn)× Pe + Rtot(Pe
0 z− Pe)/Q(Pe) (2.106)
∂Pn
∂t= γn(B + λMePe)× Pn + Rn
tot(Pn0 z− Pn) (2.107)
Where Rtot and Rntot are generalized relaxation rates for potassium and 3He and
the system is designed to relax towards equilibrium polarizations Pn0 and Pe
0 point-
ing along z. For small transverse excitations of the spins, these equations can be
linearized and converted to complex notation as follows:
Pe⊥′(t) = (−iγe(Bn + λMnPn
z )Pe⊥ − RtotPe
⊥ + iλMnz Pn⊥)/Q(Pe) (2.108)
Pn⊥′(t) = −iγn(Bn + λMePe
z )Pn⊥ − Rn
totPn⊥ + iλMe
zPe⊥ (2.109)
where the real and imaginary components of the polarization P⊥ correspond to the
x and y components, respectively. The magnetic fields experienced by the nuclear
spins and the electron spins are different:
Bez = Bn + λMnPn
z (2.110)
Bnz = Bn + λMePe
z (2.111)
To discover strongly coupled dynamics, the external field Bn is set to the “compen-
sation point” where Bn largely cancels the nuclear magnetization λMnPnz . At the
compensation point, Bn is
Bncomp. = −λMnPn
z − λMePez (2.112)

2.6. Coupled spin ensembles 61
−10
−5
0
5
10
Sig
nal
Pe x
(arb
.)
0 0.2 0.4 0.6 0.8 1
Time (s)
Bn< Bn
comp.
Bn∼ Bn
comp.
Figure 2.15: Transient responses according to the analytical solution to the Bloch equations2.109 for coupled spin ensembles. Far from the compensation point (solid), the electronand nuclear precession is distinct. Close to the compensation point (dashed), the coupleddynamics exhibit coherent oscillation and fast damping of the nuclear spin precession.
In this notation, Bn always refers to the externally applied field along z and must
not be confused with the variable Bz, which is used elsewhere in this text to mean
the sum, usually small or zero, of Bn and the magnetizations in the cell. Near
the compensation point, even though the electron and nuclear spin gyromagnetic
ratios are separated by three orders of magnitude, their precession frequencies can
be brought into resonance because they experience different fields Bez Bn
z .
One can verify that the following solution satisfies the linearized Bloch equa-
tions:
Pex(t) = <
[P1e−(Ae+An+F)t/2 + P2e−(Ae+An−F)t/2
](2.113)
Ae = (iγe(Bn + λMnPnz ) + Rtot)/Q(Pe) (2.114)
An = iγn(Bn + λMePez ) + Rn
tot (2.115)
F =√
(An − Ae)2 − 4γnγeλ2MeMnPez Pn
z /Q(Pe) (2.116)

2.6. Coupled spin ensembles 62
The solutions contain two separate oscillators with hybrid precession frequencies.
Far from the compensation point these two oscillators are clearly identified as the
uncoupled precession of the electron and nuclear spins. The nuclear and electron
spin response can be identified by the first and second terms in Equation 2.113, re-
spectively. The analytical solution is plotted in Figure 2.15 using K and 3He under
typical experimental conditions. Close to resonance, the precession frequencies are
matched and the entire system exhibits a hybrid response where the contribution
from nuclear and electron spins becomes impossible to discern. At the compensa-
tion point the nuclear spin precession is damped much faster than in the uncou-
pled case because the nuclear spin motion is strongly coupled to the electron mo-
tion and, thus, is strongly damped by the significantly higher relaxation rate of the
electrons. The electron precession, in turn, experiences a longer effective lifetime
because it is driven by the nuclear motion.
The dominant co-magnetometer signal comes from of the slower-oscillating
and longer-lived of the two oscillators in Equation 2.113:
iωn + Γn = (Ae + An + F)/2 (2.117)
At large detunings from the compensation point, the frequency and decay rate of
observed oscillations are described by this expression, which can be identified as
the dynamics of the nuclear spin. Solving for the decay rate at the compensation
point, one finds
Γn =γnγeλ
2MeMnPez Pn
z Rtot
(γnλMnPnQ(Pe))2 + R2tot
(2.118)
Tuned to the compensation point for typical experimental conditions, excitations of
the K-3He coupled system decays at Γ ∼ 5 1/s, which is significantly shorter than

2.6. Coupled spin ensembles 63
the uncoupled nuclear spin relaxation rate of ∼ 100 s. This dramatic foreshorten-
ing of the nuclear spin transverse relaxation rate, without a corresponding degrada-
tion of the nuclear spin polarization, is an essential aspect of the co-magnetometer.
Since the co-magnetometer reaches equilibrium in less than a second, the exper-
iment can run through a variety of complex calibration and zeroing procedures,
each requiring many quasi-static co-magnetometer response measurements, in a
finite amount of time. The quasi-static and equilibrium responses are discussed in
great detail in section 2.7.
2.6.2 Oscillatory response dynamics
The response to an applied oscillating magnetic field Bx = B0 cos(ωt) can be also
be solved using the linearized Bloch equations. Plugging in this oscillatory field,
asserting oscillatory solutions Pe⊥ = Pe
0ei(ωt+φe) and Pn⊥ = Pn
0 ei(ωt+φn), and solving
for Pe0 , one obtains
Pe0 =
Pez γeB0ω sin(ωt)
γnλMnPnz (iω + Rtot) + ω(iω + iγeλMePe
z + Rtot)(2.119)
To study the co-magnetometer response to slowly varying fields, take the real part
of this expression and expand the result in ω. The measured oscillating signal
amplitude to first order is
S(ω) =B0γePe
z ω sin(ωt)γnBnRtot
+O(ω2) (2.120)
Terms with higher orders of ω have been neglected because they do not signifi-
cantly contribute at low frequency. Thus, the suppression of an oscillating Bx field
is linear in frequency ω.

2.7. Steady state signal dependence 64
2.7 Steady state signal dependence
The long-term systematic effects of drifting magnetic fields and lightshifts are the
primary concerns in a test of CPT symmetry. Solving the Bloch equations (Equa-
tion 2.103) for the potassium magnetization Pex in steady state and keeping leading
order terms for each magnetic field and lightshift, one obtains the following expres-
sion:
S =Pe
z γeRtot
R2tot + γ2
e (Bz + Lz)2
×[
bny − be
y + Ly +Ωy
γn+
smRm + αRp
γePez
+Bz
(bey + By
Bn − Lxγe
Rtot
)+
γe
Rtot
(BxBz(Bz + Lz)
Bn − LxLz
)](2.121)
where the following notation has been introduced:
Bz = Bn + λMnPnz + λMePe
z (The compensation point) (2.122)
which is near zero when the external field Bn cancels the 3He and (much smaller)
K magnetizations. In the case that all quantities B and L are zero, Equation 2.121
simplifies to
S =Pe
z γe
Rtot(bn
y − bey) (2.123)
Hence, the co-magnetometer signal is proportional to the difference in field cou-
pling to the two spin species. For a regular magnetic field, the coupling to electron
and nuclear spins is equal, bny = be
y, and the co-magnetometer signal vanishes. Not
only does the signal vanish but also sensitivity to small changes in each quantity
is suppressed by at least one small factor.
Figure 2.16 illustrates how the 3He cancels an applied transverse field and main-
tains the K in a nearly zero field environment. In steady state, the 3He polarization

2.7. Steady state signal dependence 65
Bn
BxBn
(a) 3He cancels the external field Bn (b) 3He compensates for Bx
I3He
M3He
B
SK
MK
K feels no change
I3He
M3He Bn
SK
MK
K feels no field
Figure 2.16: The co-magnetometer is insensitive to applied magnetic fields: (a) the 3Hemagnetization is cancelled by an externally applied Bn z. (b) In response to a slowly chang-ing transverse field Bx, the 3He spins adiabatically follow the total field and to first orderthe 3He magnetization cancels the applied field.
is aligned with the ambient magnetic field. The ambient magnetic field Bn is ad-
justed to exactly cancel the 3He magnetization, M3He (= Mn), which points oppo-
site to its spin, thereby satisfying the compensation condition in Equation 2.122. If
a small transverse field Bx Bz is introduced, the 3He polarization will settle to lie
along the total magnetic field and, to first order, the 3He magnetization will cancel
the applied transverse field. As long as the transverse field does not significantly
alter the total magnitude of the magnetic field, the 3He spin is able to align with
the total field and its magnetization will cancel the total field.
Note that this compensation behavior only works for transverse fields Bx and
By; a longitudinal field, Bz is not compensated. That is not a problem because
the K magnetometer is generally insensitive to longitudinal fields because they are
parallel to the spins and do not cause precession. This behavior is useful for sup-
pressing low-frequency Johnson noise from the magnetic shields or other drifts in

2.7. Steady state signal dependence 66
the ambient magnetic fields. By virtue of keeping the K spins in zero field, the 3He
maintains the low field requirement of the spin-exchange relaxation-free operation
of the K magnetometer.
2.7.1 Steady state signal dependence refinements
The exact solution to the Bloch Equations 2.103 contains a large number of terms, a
great many of which are insignificant for small perturbations around the nominal
configuration. The most significant corrections to the co-magnetometer signal ex-
pressions in Equations 2.121 and 2.123 come from the inclusion of spin-exchange
and spin-destruction collision effects as well as other nonlinear dynamics. Includ-
ing these terms significantly proliferates the quantity of terms in the solution. One
must assign typical experimental values to each parameter and retain terms up to
the desired significance. The particular values chosen for the analysis in this sec-
tion can be found in Table 2.3 and reflect the nominal operating conditions of the
experiment.
It is convenient to place all terms in the solution in terms of a common denomi-
nator and analyze the significance of terms in the numerator and denominator sep-
arately. The denominator in Equation 2.121, R2tot + γ2
e (Bz + Lz)2, can be extended
to include higher order terms:
DSR2tot = R2
tot
(1 +
γ2e
R2tot
(Bz + Lz)2 + 2Cnse − 2
Bz
Bn + 2Dese +O(10−6)
), (2.124)

2.7. Steady state signal dependence 67
Parameter Variable Typical Value3He gyromagnetic ratio γn 3.24 kHz/GElectron gyromagnetic ratio γe 2.8 MHz/GK slowing down factor Q(Pe) 5.0Temperature T 160CK number density ne 2.2× 1013 cm−3
3He pressure p 7 amgK polarization field factor λMe 10 µG3He polarization field factor λMn 170 mGK pumping rate Rp 180 1/sK probe beam pumping rate Rm 6.6 1/sK spin-exchange rate Ren
se 26 1/sK spin-destruction rate Re
sd 79 1/sK total relaxation rate Rtot 396 1/s3He spin-exchange rate Rne
se 1.5× 10−5 1/s3He spin-destruction rate Rn
tot 0.001 1/sPump photon spin polarizations sp
z 0.99sp
x , spy 10−4
Probe photon spin polarizations smx 10−4
smy , sm
z 0K polarization Pe
z 54%3He polarization Pn
z 0.93%3He compensation field Bc
z 1.6 mGMagnetic field offset B 10−7 GHorizontal lightshifts Lx, Lz 10−7 GVertical lightshift Ly 0Rotation (earth) Ω 2.58, 5.16, 4.47 × 10−5 rad/secAnomalous fields be, bn 10−8 G
Table 2.3: Typical experimental parameters used to determine the relative significanceof terms in the solution to the Bloch equations. Wherever these values deviate from thetheoretical calculations earlier in this chapter, the new values are informed by direct mea-surements that are detailed in Chapter 3.

2.7. Steady state signal dependence 68
where Equation 2.122 was used wherever possible to simplify the expression and
where the following notation was introduced:
Cnse ≡
γePez Rn
seγnPn
z Rtot∼ 10−3, and (2.125)
Dese ≡
MeRese
MnRtot∼ 10−5. (2.126)
The terms immediately to the right and left of 2Cnse in the denominator are also on
the order of 10−3 and omitted terms are entirely higher order corrections.
Analysis of the terms in the numerator of the full solution is broken into sec-
tions for each term of interest. The signal dependence of anomalous fields, rotation,
magnetic fields and lightshifts can analyzed separately, but one must not attempt
to add them all together to obtain a complete expression for the signal dependence
because many of the terms are shared and would be over-counted.
2.7.2 Anomalous field dependence
The leading order corrections to the anomalous field coupling are
S(bey, bn
y) =Pe
z γebny
RtotDS
(1 + Cn
se −Bz
Bn + Dese +O(10−6)
)−
Pez γebe
y
RtotDS
(1 + Cn
se − 2Bz
Bn + Dese +O(10−6)
)(2.127)
Inserting the expression for the denominator in Equation 2.124 and utilizing the
approximation (1 + ε)−1 ' (1− ε) for small ε, one finds
S(bey, bn
y) =Pe
z γebny
Rtot
(1− Cn
se −γ2
e
R2tot
(Bz + Lz)2 +Bz
Bn − Dese +O(10−6)
)−
Pez γebe
y
Rtot
(1− Cn
se −γ2
e
R2tot
(Bz + Lz)2 − Dese +O(10−6)
)(2.128)

2.7. Steady state signal dependence 69
When the z magnetic field and lightshift are properly zeroed this expression sim-
plifies to
S(bey, bn
y) =Pe
z γe
Rtot(bn
y − bey)(1− Cn
se − Dese +O(10−6)) (2.129)
Thus, sensitivity to anomalous fields is only slightly reduced by spin-exchange
effects (a reduction of 10−3).
2.7.3 Rotation dependence
The co-magnetometer constitutes a sensitive gyroscope. Rotation Ω of the system
provides an effect analogous to the anomalous fields. The dominant dependence
on rotation, including terms from the denominator, is
Srot =Pe
z γeΩy
γnRtot
(1− γn
γeQ(Pe)− Cn
se −γ2
e
R2tot
(Bz + Lz)2 +Bz
Bn − Dese +O(10−6)
)(2.130)
With Bz and Lz properly zeroed the rotation signal becomes
S(Ωy) =Pe
z γeΩy
γnRtot
(1− γn
γeQ(Pe)− Cn
se − Dese +O(10−6)
)(2.131)
Thus, the co-magnetometer is sensitive to rotation around the y axis and is en-
hanced by a factor γe/γn 1. The slowing-down factor Q(Pe) provides an im-
portant 1% correction. It is convenient to define an effective gyromagnetic ratio to
convert between magnetic and rotation signals:
Ωy = γgBeffy where γg '
(1
γn− Q(Pe)
γe
)−1
. (2.132)
This equivalence allows one to calibrate a co-magnetometer gyroscope using mag-
netic fields instead of rotation.

2.7. Steady state signal dependence 70
Rotation around the other axes is suppressed compared to Ωy:
S(Ωz) =Pe
z Ωz
RtotDS
(−γeLxQ(Pe)
Rtot+
γeBy
γnBn +γ2
e BeLx
γnBnRtot+O(10−4)
)(2.133)
S(Ωx) =Pe
z Ωx
RtotDS
(γ2
e (Bz + Lz)γnRtot
− γe(Bz + Lz)Rtot
+γ2
e BeBz
γnBnRtot+O(10−4)
)(2.134)
Although Ωz is suppressed by a factor of 105, Ωx is suppressed by only a factor of
100 compared to Ωy for these parameters.
The rotation of the earth provides a significant offset in the co-magnetometer
signal. The gyroscopic properties of the experiment are experimentally investi-
gated in Chapter 5.
2.7.4 First order experimental imperfections
The pump and probe beams are nominally orthogonal, but small misalignments
can give significant signals. If the beams are an angle α away from orthogonal,
then the signal dependence is
S(α) = αRp
Rtot(2.135)
The signal due to non-orthogonality can be distinguished from other signals by the
dependence on pumping intensity. Whereas signals due to most misalignments
are suppressed at high pumping intensity, this misalignment generates a signal
that increases towards an asymptote with increasing pumping intensity.
The signal also has first order dependence on the degree of circular polarization
of the probe beam:
S(sm) = smRm
Rtot(2.136)

2.7. Steady state signal dependence 71
This effect is usually manageable because the probe beam intensity is very low and
the probe circular polarization is periodically zeroed. This effect becomes domi-
nant when the pump beam is blocked and the only remaining sources of K spin
pumping come from the probe beam and through spin-exchange with polarized
3He.
The only first order dependence on the magnetic fields and lightshifts comes
from the Bx field:
S(Bx) =Pe
z Bx
BnDS
(Ce
se + Cnse +
γ2e Bz(Bz + Lz)
R2tot
+O(10−6))
(2.137)
where the last term is order 10−5 and the following notation was introduced:
Cese ≡
Pnz Re
sePe
z Rtot∼ 10−2 (2.138)
The first order sensitivity to Bx is a non-negligible effect that may place a significant
limit on the field suppression capabilities of the co-magnetometer. The first order
sensitivity can be seen in Figure 2.17.
2.7.5 Second order experimental imperfections
Although the co-magnetometer is operated with lightshifts and magnetic fields set
close to zero, it is necessary to periodically introduce nonzero magnetic fields to
calibrate and re-align all the fields to compensate for drifts. Second and higher or-
der corrections to the signal response in Equation 2.121 can have significant effects
on calibrations and zeroing procedures, especially when the applied fields are par-
ticularly large. As with the rotation and anomalous field corrections, most of the
corrections are small factors due to spin-exchange and spin-destruction collisions.

2.7. Steady state signal dependence 72
−500
0
500
Sig
nal
(fT
)
−40 −20 0 20 40
Bz (µG)
Ω = Ω⊕
Bx = 500 nG
By = 500 nG
−4000
−2000
0
2000
4000
Sig
nal
(fT
)
−40 −20 0 20 40
By (µG)
−50
−25
0
25
50S
ign
al(f
T)
−40 −20 0 20 40
Bx (µG)
Figure 2.17: Signal response to Bx, By and Bz scans according to numerical simulations ofthe full Bloch equations (Equation 2.103). Top: The small first order dependence on Bx isdue to the spin-exchange terms found in Equation 2.137. Middle: To first order the systemis insensitive to By. Bottom: The earth’s rotation rate gives a slight first order dependenceon Bz around zero.

2.7. Steady state signal dependence 73
In zeroing Bz, the term S ∝ ByBz is typically utilized. For applied By field with
nonzero Bz field, the signal is
S(By, Bz) =Pe
z γeByBz
BnRtot
×(
1 +Ωz
γnBn −Bz + Lz
Bn Cese −
2Bz + Lz
Bn Cnse −
γ2e
R2tot
(Bz + Lz)2 +O(10−5))
(2.139)
The Ωz term is order 10−2. For vanishing Bz, this form simplifies to
S(By) =Pe
z γeBy
Rtot
(Ωz
γnBn −Lz
Bn (Cese + Cn
se) +O(10−8))
(2.140)
where the first term in the parentheses is order 10−5 and the second term is order
10−7.
When calibrating the magnetometer, one modulates By and measures the signal
response as a function of Bz. The slope of this response also has spin-exchange
corrections:
∂2S∂By∂Bz
=γePe
zBnRtot
(1− Cese − 2Cn
se +O(10−4)) ' γePez
|Bn|Rtot(2.141)
where the last step represents the usual approximations that are made in calculat-
ing the calibration. These additional terms provide a significant 1% correction to
the calibration.
For applied Bz field, the signal is
S(Bz) =Pe
z γeBz
RtotDS
(−γeLx
Rtot+
γeΩx
γnRtot+
Rpspy
Pez Rtot
+By
Bn +γe
Rtot+O(10−6)
)(2.142)
Note the strong, order 10−2, BzLx term in this expression; for Lx ∼ By, the signal
due to the Lx term is 103 times larger than the By term because γeBn Rtot. This

2.7. Steady state signal dependence 74
−500
−250
0
250
500
Sig
nal
(fT
)
−40 −20 0 20 40
Lz (µG)
Ω = Ω⊕
Lx = 190 nG
Bz = 10 µG, Bx = 1 µG
−10
−5
0
5
10
Sig
nal
(fT
)
−40 −20 0 20 40
Lx (µG)
Probe pumping
Lz = 10 µG
Figure 2.18: Signal response to lightshifts according to numerical simulations of the fullBloch equations. Top: The probe beam lightshift is dominantly a polarization pumpingeffect corresponding to the first order dependence in Equation 2.136; by comparison theterms in Equation 2.143 are insignificant. Bottom: The signal dependence on the pumpbeam lightshift showing the significance of the most important terms in Equation 2.144.
term is of particular concern because Bz is constantly drifting on account of drifting
3He polarization. Furthermore, the probe beam lightshift Lx is difficult to zero
everywhere in the cell because of potential non-uniform birefringence of cell walls.
Note, also, the dependence on the earth’s rotation Ωx of order 10−4. The rotation
sensitivity in both Ωx and Ωz provides the curious Bz dependence shown in Figure
2.17. The vertical pumping term Rpspy is on the order of 10−5.

2.7. Steady state signal dependence 75
For applied Lx, the signal is
S(Lx) =Pe
z γ2e Lx
R2totDS
×(−Lz − Bz − Bz
λMePez
λMnPnz
+ 2BzLz + B2
zBn − Ωz
γeQ(Pe) +O(10−12 G)
)(2.143)
Terms in the parentheses are order 10−7, 10−7, 10−10, 10−11 and 10−11 Gauss. If
the probe laser is detuned from resonance, the lightshift effects described here are
typically much smaller than the probe beam pumping term given by Equation
2.136. Indeed, in the simulations plotted in Figure 2.18, the lightshift only provides
a small perturbation on the signal due to pumping by the probe beam.
For applied Lz, the signal is
S(Lz) =Pe
z γ2e Lz
R2totDS
(−Lx +
Ωx
γg+
Rpspy
γePez
+2BzLx + BzBx
Bn +O(10−13 G)
)(2.144)
Terms in the parentheses are order 10−7, 10−9, 10−12, and 10−12 Gauss. The LxLz
term provides a clean method to zero the lightshifts. The dependence of the sig-
nal on Lz is plotted in Figure 2.18. The nonzero slope around Lz = 0 is due to
the earth’s rotation rate. The lightshift drift according to Equation 2.89 is about
dLz/dλ = 1.4µG/pm (140 pT/pm). According to Equation 2.144, with everything
perfectly zeroed, drifting wavelength provides a signal due to the earth’s rotation
of dS/dλ = 1.3 fT/pm. Thus, it is important to have a very stable pump laser and
a robust zeroing routine that maintains Lz at zero.

2.7. Steady state signal dependence 76
−0.25
0
0.25
0.5
0.75
1
Sig
nal
(fT
)
0 200 400 600 800
Pumping rate (1/sec)
bey = 8.16 pG
Ω = 26.3 nrad/s
Bx = 159 nG
By = 11 nG
Lx = 184 pG
α = 75 nrad
β = 5 µrad, Lz = 1 µG
Nominal operating point
Figure 2.19: Leading order contributions to the co-magnetometer signal are plotted as afunction of pumping intensity. Each contribution term is given a magnitude sufficient togenerate a maximum effective 1 fT signal. At the nominal operating point, contributionsfrom Bx, By, and Lx are explicitly zeroed out by zeroing procedures and are suppressedby at least one small factor. Note that the potassium polarization contribution to the totalBz field varies with pumping rate, which is what ultimately brings out the dependence ofmost of these terms.
2.7.6 Signal pumping intensity dependence
For the purpose of making measurements, the co-magnetometer is operated with
the pump beam intensity set to maximize the sensitivity. There are several in-
stances, however, when the intensity is increased or decreased for calibration or
diagnostic purposes. The signal due to various misalignments as a function of
pump beam intensity can be found in Figure 2.19. This plot is based primarily on
the leading order dependence of each term found in Equation 2.121. There is one
value of pumping intensity at the nominal operating point for which the sum of the
K and 3He polarizations are exactly compensated and Bz = 0. At other intensities,
the potassium polarization contribution to the total Bz field varies with pumping

2.7. Steady state signal dependence 77
rate, which elicits the dependence of most of these terms. There are only two ef-
fects that do not approach zero at high pumping rate: the first is the pump-probe
non-orthogonality angle α and the second effect arises from generating a vertical
lightshift Ly by steering the pump beam lightshift Lz by an angle β into the vertical
direction. The latter effect is brought to zero when the magnetic fields are aligned
using zeroing procedures. The non-orthogonality is explicitly zeroed out through
zeroing procedures. After everything else is properly zeroed, what remains is the
signal due to rotation of the earth corresponding to the black curve in this plot.
At very low pumping intensity many imperfections are strongly amplified. Sen-
sitivity to imperfections in Bx, By and Lx peak around Rp ' 10 1/s. When the
pump beam is blocked, the pumping rate does not reach zero but rather decreases
only to the level of the 3He spin-exchange pumping. A convenient way to suppress
this sensitivity involves applying a strong Bz field whenever the pump is blocked
for a low intensity background measurement. The large Bz primarily suppresses
the signal by making the denominator, DS ' 1 + B2z γ2
e /R2tot + · · · , very large (Equa-
tion 2.124).

Chapter 3
Co-magnetometer implementation
THE CO-MAGNETOMETER SEARCHES for a sidereal signal as the earth rotates
through a background anomalous field b. The previous chapter provided
a solid theoretical design for a co-magnetometer that is sensitive to anomalous
fields and largely insensitive to other imperfections. This chapter describes the im-
plementation of the co-magnetometer and verifies that the magnetometer behaves
as described in the previous chapter. The various measurements throughout this
chapter are not always directly comparable to each other and to the theoretical
expectations because they were taken over the course of three years under differ-
ent operating conditions. The objective of the characterization measurements pre-
sented in this chapter is to provide at least a qualitative verification of the most
important aspects of the co-magnetometer.
This chapter begins with a description of the experimental apparatus in Sec-
tion 3.1. The characterization measurements are contained in Section 3.2. Section
78

3.1. Co-magnetometer setup 79
3.3 discusses the methods that were developed to minimize imperfections in the
experiment such as misaligned laser beams and non-zero magnetic fields.
3.1 Co-magnetometer setup
The K-3He co-magnetometer is created using an optical pump-probe setup shown
in Figure 3.1. K vapor is held in a spherical, 2.5 cm diameter GE180 aluminosilicate
glass cell with thin walls. The walls of the cell, seen in Figure 3.2 are sufficiently
thin at about 6 mil (0.15 mm) that the light is not significantly deflected except at
the edges. Also in the cell are 50 torr N2 gas to quench the excited state and 7 amg
3He gas. The 3He has a few important roles: it provides a nuclear spin, it is an
effective buffer gas to reduce diffusion, and it broadens the K lines to increase the
optical depth of the vapor.
A double-walled oven shown in Figure 3.2 heats the cell to create a K vapor
density of n ∼ 1013 cm−3 by flowing 160C hot air between the walls that surround
the cell. The oven is constructed using G7, a woven fiberglass-epoxy composite,
and is insulated with a uniform 2.5 cm layer of fiberglass insulation. The seams of
the oven are sealed using Fomblin, a high temperature paste made of a Teflon-like
fluoropolymer. The double-walled design keeps turbulent hot air out of the optical
path and uniformly heats the cell. The insulated oven is placed in a water-cooled
box made of high thermal conductivity epoxy. The cell-oven-cooling-box assembly
resides inside a rigid G10 tube, shown in Figure 3.3, around which magnetic field
and gradient coils are wrapped. Five layers of high permeability metal magnetic
shields surround this assembly. Between each magnetic shield, white melamine

3.1. Co-magnetometer setup 80
Oven
Probe BeamOptical Table
Optical TableLower Section
Encl
osur
es
Mag
netic
Shi
elds
Pump Beam
Pola
rizer Position Detector
DeviatorPinhole
Piezomirror
IsolatorTranslating Lens
Collimating Lens
(Analyzing) Polarizer
Photodiode
Position Detector
Probe BeamDiode Laser
Fabr
y-Pe
rot
Fara
day
Mod
ulat
or
Field Coils
l/2
y z
x
Pock
el C
ell
PinholePo
lariz
er
l/4
l/2VariableWaveplate
Polarizer
Shutter
Lenses
Final Mirror
Translation Stage
Position Detector
Spectrometer
Pump Beam Diode Laser
Cell
Hot Air FlowCollimator
InsulationCooling Jacket
Position feedback
Figure 3.1: Schematic of the experiment indicating: pump and probe lasers with surround-ing enclosures, frequency and intensity feedbacks, beam steering optics, the double-walledoven and magnetic shielding. The relative position of each component in this figure resem-bles the configuration in the actual experiment.

3.1. Co-magnetometer setup 81
Figure 3.2: Left: The co-magnetometer cell is held by its stem. The wired device is a thin-film 10 kΩ RTD temperature sensor. Note that the potassium has migrated to a cold spoton the cell. Middle: The double-walled oven has an inner volume for the cell and an airgap between the two walls through which hot air flows. Right: Chilled water cools theexterior of the cooling shield, which is made of a thermally conductive epoxy.
acoustic absorption foam is installed to reduce acoustic noise. Everything is held
in place with a Ti frame and radial Ti rods that penetrate the magnetic shields
and directly support the G10 tube coil form. Evacuated glass tubes bring the laser
beams in from the outside through the magnetic shielding and thermal shielding
directly to the inner oven where the cell resides. The evacuated tubes eliminate
turbulent convection driven by the large thermal gradient between the oven and
the room.
Care was taken to minimize metal and other sources of magnetic noise inside
the magnetic shields of the experiment. The only metals and currents come from
the temperature sensors distributed around the oven and they are only operated
using high frequency AC modulation or they are momentarily operated with DC
excitation when data is not being taken. The AC excitation frequency is beyond the
bandwidth of the magnetometer. The magnetic shields are electrically insulated
from the support structure so as to avoid creating Ti-Fe thermocouple junctions.

3.1. Co-magnetometer setup 82
Figure 3.3: Above: The five layers of high-permeability metal suppress external fields bya factor of 106. A Ti frame supports the shields and firmly holds the green G10 piece in thecenter. The oven assembly rests inside the G10 coil form. The white layers are melaminesound absorbing foam. Below: View of the entire experiment, showing the open thermalshields surrounding the experiment and Lexan enclosures around the optics. The magneticshields are covered by fiberglass insulation.

3.1. Co-magnetometer setup 83
Great effort was expended controlling the temperature of the experiment. From
the beginning of the experiment, thermal drift of various components has con-
tributed to the signal in a variety of ways. Section 4.2.3 discusses thermal sensi-
tivity in greater detail. To improve temperature stability a number of parts were
added to the experiment. The pump and probe lasers have independent 10 mK-
stable analog temperature controllers that control the temperature of the laser mou-
nts by adjusting the temperature of cooling water. In Figure 3.3, fiberglass insu-
lation covers the magnetic shielding and a high performance thermal insulation
foam board forms an insulating shield around the entire experiment. In a more
recent improvement, an air conditioner in an adjacent room now pumps cold, dry
air through a bucking heater and blows temperature-controlled air into the thermal
shields. The positive pressure on the thermal shields prevents room temperature
air from leaking through cracks in the thermal shields.
3.1.1 The pump laser
The pump beam is formed using a diode laser tuned onto the K D1 resonance at
770 nm. Three types of laser diode have been used to create the pump beam. At
first several brands of 1 W broad area laser diode were used in an external grating
cavity feedback configuration. These diodes featured a broader linewidth that had
a longer effective optical depth and could be tuned in a reasonably smooth fashion
by adjusting the feedback grating. Their spectrum was significantly smoothed by
dithering or modulating the laser driver current. However, the broad area diode
lasers suffered from having short lifetimes, high mode noise and significant drift.
Half way through the data set in this thesis (at around 1800 sd), the experiment

3.1. Co-magnetometer setup 84
started using a single mode, tapered amplifier diode laser for the pump beam. The
single mode laser greatly improved the mode noise and drift but was unable to
tune the wavelength smoothly over a wide range, making routine zeroing of the
pump lightshift impossible. Wavelength stability was achieved by carefully con-
trolling the temperature of the entire laser assembly to < 10 mK. A further up-
grade (at around 2060 sd) to a distributed feedback (DFB) laser is planned in order
to achieve both single mode operation and smooth wavelength tuning. Since DFB
lasers do not use an external cavity, they are less sensitive to ambient air tempera-
ture.
Glass wedges pick off a few percent of the pump beam in order to measure
intensity and wavelength. Intensity stabilization for the pump laser is achieved us-
ing feedback to a liquid crystal variable waveplate. While running with the broad
area diode lasers, the pump wavelength was stabilized using a spectrometer with
a two-segment photodiode at the outlet and a feedback to the laser external cav-
ity grating angle. Although wavelength feedback is not possible with the tapered
amplifier pump laser due to its tendency to hop modes, wavelength feedback and
adjustment is possible using a DFB laser.
The spatial profile of the single mode pump beam is significantly improved by
focusing the pump beam through a pinhole. After the pinhole, the pump beam
has a smoother, Gaussian intensity profile. A set of expansion optics creates a 3
cm wide by 1 cm high rectangular beam shape. The spherical aberration of short
focal length lenses is utilized to make the intensity profile slightly more uniform.
The beam is made uniform in intensity and wider than the cell so that small move-
ments in the pump beam do not significantly change which parts of the cell are

3.1. Co-magnetometer setup 85
pumped. The position of the pump beam is measured using a four-segment pho-
todiode, positioned such that the position measurement reflects the position at the
cell. Finally, the pump beam is circularly polarized using a λ/4 waveplate before
it enters the glass tube, goes into the cell and pumps the K vapor in the cell.
3.1.2 The probe laser
The probe beam passes perpendicularly to the pump beam through the cell and
measures the spin polarization along the direction of propagation. It is created by
a single frequency diode laser with a tapered amplifier. Intensity stabilization is
accomplished by employing a feedback to the tapered amplifier current. A Fabry-
Perot interferometer can be used to stabilize the frequency of the probe beam by
modulating the cavity length and locking the frequency. However, the first version
of the interferometer was sensitive to barometric pressure changing the effective
path length of the cavity. A second, evacuated version of the interferometer was
sensitive to its temperature despite the use of an Invar tube. Without a solid wave-
length measurement, the wavelength of the probe beam is stabilized by careful
< 10 mK temperature control of the laser assembly. An upgrade to a DFB laser
may improve the wavelength tunability and reduce the broadband spontaneous
emission from the tapered amplifier. The probe beam passes through a protective
optical isolator and a pinhole to create a Gaussian spatial profile. After the glass
wedge pickoff for the intensity and wavelength feedbacks, the probe beam is atten-
uated by a pair of high contrast Glan-Laser calcite crystal polarizers. The probe
laser next passes through a Faraday modulator to modulate the angle of polariza-
tion, a Pockel cell to adjust the total circular polarization of the beam and a series

3.1. Co-magnetometer setup 86
of beam expansion and steering optics. The expanded probe beam is about 1 cm
square and passes unimpeded through evacuated glass tubes and the cell in the
middle. The evacuated glass tubes are made using wedged windows on both ends
to reduce any interference effects. Four-segment position detectors measure the
position of the beam where it passes through the cell (at an equivalent but external
location) and after the cell.
The probe beam measures the component of the K polarization parallel to the
beam using optical rotation. To obtain a very high precision measurement of the
probe beam polarization angle, the polarization angle is modulated so that the sig-
nal is separated from 1/ f noise. The Faraday modulator uses a Tb-doped glass
Faraday rod surrounded by magnetic driver coil to modulate the angle of polar-
ization by α = 5 at a frequency ωm = 2π × 4.8 kHz before passing through the
cell. The probe beam picks up an angle φ due to optical rotation in the cell before
passing through a final, analyzing calcite polarizer set to extinction. The measured
photodiode signal amplitude after the final polarizer is given by
I = I0 sin2[α sin(ωmt) + φ] (3.1)
' I0[α2 sin2(ωmt) + 2φα sin(ωmt)] (3.2)
A lock-in amplifier measures the first harmonic component of the dominantly sec-
ond harmonic signal:
S ∝ Iωm ' 2I0φα (3.3)
If there is no optical rotation φ then the first harmonic has zero amplitude. Using
this modulation technique, angular sensitivity of a few 10−8 rad/√
Hz has been
achieved, which is sufficient to measure below 1 fT/√
Hz in this experiment.

3.1. Co-magnetometer setup 87
−50
0
50
Dev
iati
on
(mra
d)
−1 −0.5 0 0.5 1
Impact parameter (cm)
Thin probe beam
5 mm probe beam
Figure 3.4: Light is defocused by the cell walls and is worst at the edges. The effects aresomewhat mitigated by using a broad beam.
The Faraday rotator is a large assembly that generates a lot of heat and mechan-
ical noise. To reduce drift due to temperature variation, an optimized driver coil
was designed and fabricated with temperature-controlled chilled water flowing
around the inside surface of the coil. To reduce mechanical drifts, the Faraday rod
is mounted in a form-fitting phenolic tube that passes through the center of the
coils without touching the coil assembly at all and is separately held by posts on
the optical table. A µ-metal magnetic shield surrounds the coils to prevent ambient
magnetic noise from generating rotation and also to prevent the driver field from
affecting the surrounding electronics.
The pump and probe beams are enclosed by 0.5 in thick Lexan boxes with rub-
ber seals to reduce air currents in the room flowing through the path of the beam
and introducing extra noise. These enclosures significantly improve the short-term
noise of the signal and may also contribute to the long-term stability.

3.1. Co-magnetometer setup 88
Untitled-2 3
Figure 3.5: Light is defocused by the cell walls and is worst at the edges. A single plano-convex lens can correct for the defocusing of the majority of the rays. The cell thicknesshas been greatly exaggerated for illustration purposes.
With ∼ 0.006 thick walls, the co-magnetometer cell is a weak lens. To maintain
a clean probe beam spot all the way through the experiment, one must compensate
for the slight lensing effect of the cell. Figure 3.4 shows a calculation for the angle
that a beam deviates as a function of the impact parameter on the cell. Figure 3.5
demonstrates that a simple plano-convex lens is sufficient to correct for the vast
majority of the cell defocusing. For the cell presently used in the experiment, an
f = 500 mm lens works well.
3.1.3 Probe beam steering optics
A set of three beam expansion and steering lenses shown in Figure 3.6 are used to
find the “sweet spot” where the beam passes through the center of the cell. The
significance of the sweet spot will be discussed in greater detail in Section 4.2.4.
The three components are a deviator, which steers the beam by adjusting a vari-
able angle glass wedge, a lens mounted on a 3-axis translation stage and a fixed
collimating lens. The deviator is constructed using matching concave and convex

3.1. Co-magnetometer setup 89
Figure 3.6: Probe beam lens configuration for independent control of beam translation andangle at the cell.
lenses and an index-matching fluid that allows the two lenses to smoothly slip past
each other. The positions of the steering lenses are designed such that the deviator
and the lens on the translation stage independently change the angle of the beam
at the cell and the position of the beam at the cell, respectively. The exact positions
of these lenses were calculated using ABCD-type matrix operators representing
lenses and beam propagation (Tovar and Casperson, 1995):x
θ
1
= Mtot
x0
θ0
1
(3.4)
where x is the offset from an axis formed by a beam in the absence of any lenses, θ
is the angle of the beam relative to that axis and the total transformation matrix is
given by
Mtot = Md(d3)M f ( f2, x2)Md(d2)M f ( f1, x1)Md(d1) (3.5)

3.1. Co-magnetometer setup 90
The propagation of light a distance d is given by the matrix operator,
Md(d) =
1 0 0
d 1 0
0 0 1
(3.6)
and the matrix operator for a lens of focal length f and offset x is
M f ( f , x) =
1 0 0
−1/ f 1 x/ f
0 0 1
(3.7)
The solution for independent position and angle adjustment of the beam is deter-
mined by the set of distances d1, d2, d3 between the lenses for which the position
offset at the cell is zero, x = 0, for arbitrary θ0. The total length of the beam path
is constrained by dtot = d1 + d2 + d3 and the distance between the two lenses is
constrained by being properly collimated: d2 = f1 + f2. The solution is
d1 =f1[( f1 + f2)2 − dtot f1]
f 22 − f 2
1(3.8)
d2 = f1 + f2 (3.9)
d3 = dtot − d2 (3.10)
With a fixed second lens, x2 = 0, the orientation of the probe beam at the cell is
x =dtot f1 f2 − f2( f1 + f2)2
f 31 − f1 f 2
2x1 (3.11)
θ = − f1θ0 + x1
f2(3.12)
Thus, the deviator angle θ0 adjusts the angle with which the beam passes through
the cell θ without moving the beam off the center of the cell. The position and

3.1. Co-magnetometer setup 91
angle are not in fact completely independent; position adjustment x1 does change
the angle at the cell θ. Currently in use are lenses f1 = 100 mm and f2 = 250 mm
at positions d1 = 49 mm, d2 = 350 mm, d3 = 568 mm for dtot = 967 mm. The beam
is expanded by a factor of 2.5.
The independence of the angle adjustment can be verified by monitoring the
position of the probe beam on the four-segment position detector as the deviator
modulates the angle of the beam. The position detector is placed at a position
equivalent to the position of the cell. The positions of the lenses are tweaked until
the deviator modulation does not produce any translation at the detector; only
modifying the angle with which the beam hits the detector. This setup is not only
important for finding the sweet spot at the center of the cell (see Section 4.2.1),
but is also essential in zeroing the pump-probe orthogonality without moving the
probe beam off the center of the cell.
The position of the probe beam is fixed on the cell using the position detector
and a feedback to a piezo-controlled mirror as shown in Figure 3.1. Together with
zeroing of the pump-probe nonorthogonality, the horizontal angle, the horizontal
position, and the vertical position of the probe beam are maintained under feed-
back.

3.2. Co-magnetometer characterization 92
−0.2
−0.1
0
0.1
0.2
0.3
Lo
ck-i
nS
ign
al(V
rms)
10 20 30 40 50
Chopper Frequency (Hz)
1.2 Hz
Figure 3.7: The transverse resonance of the K magnetometer in response to chopped pumplight. The in-phase amplitudes fit a Lorentzian with a half-width of 1.2 Hz.
3.2 Co-magnetometer characterization
The co-magnetometer is evaluated first by considering the performance of a bare,
potassium magnetometer and second by probing the dynamics of a coupled K-3He
spin system.
3.2.1 The potassium magnetometer
Momentarily ignoring the 3He spins, the K atoms form a very sensitive SERF mag-
netometer. The SERF magnetometer was originally developed for this experiment
and the findings were published in Allred et al. (2002) and Kominis et al. (2003).
Several of the important experimental results are reproduced here.
The high sensitivity of a SERF magnetometer derives from the very low relax-
ation rate of the spin. This behavior can be fully appreciated only if other sources
of relaxation are minimized. The pumping rate at typical operating intensities is a

3.2. Co-magnetometer characterization 93
0
2
4
6
Res
on
ance
hal
f-w
idth
(Hz)
0 50 100 150 200 250
Chopper Frequency (Hz)
3 atm 3He Cell
∆ν = (79 µs)ν2 + (1.08 Hz)
1.08 Hz
Figure 3.8: Transverse resonance linewidths for a range of resonant synchronous pumpingfrequencies. In the limit of low frequency, this magnetometer has a linewidth of 1.1 Hz.The quadratic magnetic field dependence according to Equation 2.17 provides a fit of Tse =8 µs.
dominant source of relaxation. A synchronous pumping technique, whereby the
pump beam is chopped at the precession frequency of the atoms, allows the atoms
to precess without pumping-induced relaxation for a significant fraction of time.
In Figure 3.7, the chopper frequency is scanned across the resonant frequency of
atoms precessing in a finite magnetic field. The frequency response is accurately
given by Equation 2.32 as a Lorentzian centered on the free precession frequency.
The linewidth of Γ = 1.2 Hz is much smaller than the spin-exchange rate of 20 kHz,
indicating that the magnetometer is indeed in the SERF regime and the linewidth
is determined by the much slower spin-destruction rate. For these measurements
the chopper was modified to pass light with a duty cycle of less than 20% so as to
minimize pumping relaxation.
A series of these synchronously pumped linewidth measurements were made
for a range of applied magnetic fields. According to Equation 2.17 the relaxation

3.2. Co-magnetometer characterization 94
Frequency of applied By (Hz)
Mag
netic
Fie
ld (f
T/H
z1/2 )
0.1
1
10
100
140120100806040200
Figure 3.9: Noise levels in a single channel (dashed) and a differential measurement be-tween two adjacent segments of the probe beam, 3 mm apart. Noise levels were limited bythe magnetic Johnson noise generated by the magnetic shields. For frequencies < 20 Hz,the noise was limited by 1/ f noise and other technical sources.
rate due to spin-exchange collisions increases quadratically with applied field. In-
deed, the data in Figure 3.8 confirms this dependence and allows one to infer
the fundamental relaxation rate R = 1.1 1/s for this cell in the limit of no spin-
exchange relaxation at zero field. The quadratic increase in relaxation rate with
magnetic field agrees with Equation 2.17. From the fit to these data, one finds a
spin-exchange time of Tse = 8 µs, which is in agreement with other measurements
by Ressler et al. (1969).
This fundamental relaxation rate determines the fundamental magnetic field
sensitivity of the magnetometer. Using the expression in Equation 2.41 for the
shot-noise limited sensitivity of this magnetometer, one obtains 20 aT/√
Hz, using
density N = 3× 1013 cm−3 and volume V = 3 cm3, corresponding to the overlap
of the pump and probe beams. The measured noise of the magnetometer, shown in

3.2. Co-magnetometer characterization 95
Figure 3.9 is in practice limited by magnetic noise generated by Johnson noise cur-
rents flowing in the conducting magnetic shielding. The shield noise of 7 fT/√
Hz
is observed over a wide range of frequencies from 20 to 100 Hz. Above 100 Hz,
the bandwidth of the magnetometer decreases and below 20 Hz sources of 1/ f
drift dominate the noise. The amount of 1/ f drift was later significantly reduced.
A differential measurement between two adjacent sections of the probe beam im-
aged onto a two-segment photo diode is capable of eliminating the common-mode
noise between the two channels. The differential measurement gives a lower noise
level of about 500 aT/√
Hz, which is limited by magnetic field gradient noise.
The probe beam can be further partitioned and imaged onto a segmented photo-
diode to measure the magnetic field structure throughout the cell. For this applica-
tion, a T-shaped cell with three flat windows allows the undistorted transmission
of the probe beam through the cell. This setup allows more accurate measurements
of the magnetic fields near the edges of the cell, which are closer to the sources be-
ing measured. By measuring higher order field gradients one can localize and
characterize certain sources of magnetic field. The measurements in Figure 3.10
demonstrate this ability for a small, 1 cm diameter current loop placed 5.3 cm
above the center of the magnetometer cell. The measurement of the characteris-
tic 1/r3 dependence of the magnetic field uniquely determines of the location of
the current loop. The spatial resolution of this magnetometer is limited by the dif-
fusion length of K atoms within one coherence time. For this magnetometer, the
spatial resolution limit is estimated to be about 2 mm.

3.2. Co-magnetometer characterization 96
Position y (cm)
Mag
netic
Fie
ld (f
T)M
agne
tic F
ield
(fT)
Linear Photodiode Array Channel Number
Applied dBy/dy Gradient
Applied External Current Loop
-1.0 -0.5 0.0 0.5 1.0
-200
-100
100
200
300
100
120
140
160
180
200
1 2 3 4 5 6 7
0
yz
PumpBeam
Probe Beam
5.3 cm
Current Loop
Cell
Figure 3.10: An applied magnetic field gradient (top) and a external current loop (bottom)are imaged by projecting the probe beam onto a 7-channel segmented photodiode. Themagnetic field gradient dBy/dy = 315 fT/cm was applied with a 25 Hz modulation. Themeasurements are consistent with a straight line to within measurement error. The outer-most, hollow points were ignored because they had low signal. The external current loopgenerated a dipole µ = 1.25 µA/cm−2 oscillating at 25 Hz. The fit to a dipolar field locatesthe current loop at 5.3± 0.1 cm, which is accurate to within the measurement error. Thelarge error bar indicates the noise in a single channel. The smaller error bars indicate thenoise level with common mode noise removed.

3.2. Co-magnetometer characterization 97
Frequency of applied By (Hz)
Freq
uenc
y Re
spon
se (a
rb.) 20
15
10
5
140120100806040200
Figure 3.11: Bandwidth of the potassium magnetometer, broadened from the 1 Hz limitby relaxation due to spin pumping. The fit line is a Lorentzian centered on zero Hz witha half width of 20 Hz. Points chosen for this measurement avoided sources of noise at, forexample, 60 Hz.
The bandwidth and frequency response of the magnetometer at zero field is
given by a Lorentzian line shape according to Equation 2.31. The frequency re-
sponse curve is measured in Figure 3.11 and the shape of the curve is found to
agree with theory to within measurement error. The bandwidth of the magneto-
meter is found to be 20 Hz (126 1/s), which is consistent with the pumping rate
of the atoms being the dominant relaxation rate. This is much larger than the
linewidth in the synchronous pumping case for which the linewidth is limited by
spin-destruction collisions.
3.2.2 Coupled spin ensembles
In the co-magnetometer, spin-exchange collisions transfer polarization from the K
electron spins to the 3He nuclear spins. In general, the two spin ensembles interact

3.2. Co-magnetometer characterization 98
−1
−0.5
0
0.5
1
Am
pli
tud
e(a
rb.)
0 100 200 300 400 500 600
Time (s)
T2 = 210 s
Figure 3.12: Uncoupled T2 measured “in the dark” with the pump beam blocked for all butthree short measurement periods. The jumbles of points represent the rapidly oscillating3He polarization when the pump beam was momentarily on.
with each other wherein the K and 3He spin ensembles precess around the magneti-
zation of the other. In Figure 3.12 the 3He spins are freely precessing at a frequency
ω = γnB with a lifetime of about T2 = 210 s. The pump beam is only momentar-
ily on so that the 3He is mostly precessing in the absence of any coherent interac-
tions with K. If the pump beam is now turned on, the K are polarized and their
magnetization alters the total effective field that the 3He experience by an amount
∆B = λMePe. In Figure 3.13, the shift in precession frequency according to the
K magnetization is plotted for a range of pumping intensity. For each data point,
the K polarization was flipped by alternating the pumping light between left- and
right-circular polarizations. From the magnetization saturation level, BK = 45.1
µG, one infers a K density of NK = 5.3× 1013 cm−3 using Equation 2.97. This is
consistent with the density NK = 6.0× 1013 cm−3 inferred from a 180C cell. The
relaxation rate of 62 1/s is consistent with the prediction in Equation 2.26.

3.2. Co-magnetometer characterization 99
0
10
20
30
40
50
Po
tass
ium
Mag
net
izat
ion
Fie
ld(µ
G)
0 200 400 600 800 1000
Pumping Rate (1/s)
BK = (45.1 µG)Rp/(Rp + 61.85 1/s)
Figure 3.13: Potassium polarization measured by the 3He frequency shift for alternatingleft- and right-circularly polarized pumping light for a range of intensities. The polariza-tion fit is correctly predicted by Equation 2.8.
As discussed above in Section 2.6.1, the K and 3He dynamics become strongly
coupled when their precession frequencies approach resonance. Whereas the cou-
pling in Figure 3.13 amounted to a 1% effect, at resonance the K and 3He dynamics
merge into a single hybrid response that has an entirely distinct frequency and de-
cay rate. Figures 3.14 and 3.15 show the transient response of the co-magnetometer
as the external field is tuned through the compensation point. The dynamics are ac-
curately predicted by the analytical solutions in Equation 2.116. The complete set
of transient responses was simultaneously fit to the analytical response equations
with the only free parameters being the K and 3He polarizations and relaxation
rates, the tipping field, and an overall magnetic field offset, which were common
to all data. The externally applied fields Bn for each transient were accurately
recorded and used as fixed parameters with only an overall offset as a fit variable.

3.2. Co-magnetometer characterization 100
1
0 0.2 0.4 0.6 0.8 1
Time (s)
Bn
= −0.750 mG
1B
n= −0.975 mG
1 Bn
= −1.038 mG
1 Bn
= −1.076 mG
1B
n= −1.094 mG
1B
n= −1.107 mG
1B
n= −1.119 mG
1 Bn
= −1.132 mG
1 Bn
= −1.151 mG
1B
n= −1.219 mG
1
Bn
= −1.378 mG
Co
-mag
net
om
eter
Sig
nal
(arb
.)
Figure 3.14: The transient response to a transverse excitation. With Bz 6= 0, the K and 3Heprecession becomes decoupled and the signal clearly exhibits separate oscillatory contribu-tions. The analytical transient response function in Equation 2.116 fit the data.

3.2. Co-magnetometer characterization 101
1
0 0.05 0.1 0.15 0.2
Time (s)
Bn
= −0.750 mG
1B
n= −0.975 mG
1 Bn
= −1.038 mG
1 Bn
= −1.076 mG
1B
n= −1.094 mG
1B
n= −1.107 mG
1B
n= −1.119 mG
1 Bn
= −1.132 mG
1 Bn
= −1.151 mG
1B
n= −1.219 mG
1
Bn
= −1.378 mG
Co
-mag
net
om
eter
Sig
nal
(arb
.)
Figure 3.15: The transient response to a transverse excitation. Same data and fit as inFigure 3.14, with the first 0.2 s expanded.

3.2. Co-magnetometer characterization 102
The fit lines agree with the transients remarkably well, providing reasonably accu-
rate estimates of the system parameters: the K magnetization is 16 µG, the 3He
magnetization is 1.07 mG, the K relaxation rate is Rtot = 226 1/s and the 3He re-
laxation rate is Tn2 = 202 s. The 3He relaxation rate is consistent with the data
in Figure 3.12. The K relaxation rate is dominated by pumping relaxation. The
fast K response at far detuning from the compensation point is suppressed in both
the experimental measurements and the analytical response by a low-pass filter.
The differences between the filters in the fit model (single pole) and measurement
(multi-pole) may introduce the observed phase lag in the high frequency compo-
nents of the signal.
The analytical form of the transient response solutions has two oscillators corre-
sponding to the K and 3He atoms. Although on resonance the K and 3He responses
are indistinguishable, the separate dynamics are particularly clear for Bn far from
the compensation point. The lower frequency and longer decay time oscillator cor-
responds to the precession of the 3He atoms. The higher frequency K precession
decays quickly and is filtered out by the data acquisition equipment. Thus, suffi-
ciently far from the compensation point the entire transient response signal is well
described by a single decaying oscillator. The frequency and decay rate of a single
decaying oscillator fit to the transient data are plotted in Figure 3.16. The frequency
and decay rate data were simultaneously fit to Equations 2.117 and 2.118. The fits,
however, give parameters that are not entirely consistent with other measurements:
the 3He magnetization is 1.10 mG, the K magnetization is 18 µG, the K decay rate
is 205 1/s and the 3He decay time is 240 s. These data are reasonably consistent
previous measurements and expectations.

3.2. Co-magnetometer characterization 103
0.001
0.01
0.1
1
10
Dec
ayR
ate
(1/
s)
0.8 1 1.2 1.4
Magnetic Field (mG)
0
2
4
6
8
Res
po
nse
Fre
qu
ency
(Hz) Uncoupled K
Uncoupled 3He
Figure 3.16: The effective frequency and decay time of the transient response as a functionof Bz detuning. The fit lines are defined by Equations 2.117 and 2.118.

3.2. Co-magnetometer characterization 104
0.005
0.01
0.02
0.05
0.1
0.2
0.5
1
Sig
nal
(V)
0 10 20 30 40 50
Frequency (Hz)
Bn
= 0; “Tuned”
Bn∼ 0; “Nearly tuned”
Bn
> 0; “Detuned”
Bn
< 0; “Detuned”
Hybrid Resonance
3He Resonance
K Resonance
Figure 3.17: Chirped By fields were applied to the co-magnetometer to obtain these fre-quency response curves for several values of the external field tuned through the compen-sation point.
The frequency response of the co-magnetometer shown in Figure 3.17 provides
another perspective on the behavior of the coupled spin system. When the external
field is detuned from the compensation point, the separate, uncoupled K and 3He
spin resonances are clearly visible. As the compensating field is tuned towards
the compensation point, the spin resonances merge into a single hybrid resonance
peak. At the compensation point, the frequency response below 6 Hz (the 3He
frequency) drops significantly faster than in the other cases. This indicates that the
co-magnetometer is properly compensating for applied fields.
The low frequency suppression of applied magnetic fields is further investi-
gated in Figure 3.18. The sensitivity to the applied Bx field is suppressed linearly
with the frequency, in accordance with Equation 2.120. The sensitivity to By is
unsuppressed at the resonance but drops off faster than Bx for the first decade in

3.2. Co-magnetometer characterization 105
0.001
0.01
0.1
1
Fie
ldS
up
pre
ssio
nF
acto
r
0.1 0.2 0.5 1 2 5 10
Frequency (Hz)
0.1
1
10
Measu
redF
ield(p
T)
Bx
By
Bz
Figure 3.18: Applied Bx, By, and Bz fields were suppressed according to Equations 2.120.At the 3He resonance the Bx and By field components are completely unsuppressed.
lower frequency. The magnetometer is insensitive to Bz because it is parallel to the
spins.
The entire experiment was subjected to a By magnetic field and the frequency
response is plotted in Figure 3.19. The magnetic shields provide a factor of about
106 suppression of the applied field and the co-magnetometer supplies the rest of
the suppression at low frequencies. At 100 s timescales, the total external field
suppression factor is 10−9. For modulations with periods longer than 100 s, the
suppression is still operative but long term drifts dominate the signal. Magnetic
storms can change the direction and magnitude of the earth’s magnetic field by
as much as 10%, which after 100 s would result in a 2 fT signal and after 1000
s would be just 0.2 fT. Normal diurnal distortion of the magnetosphere is much
less significant. Thus, external field fluctuations are not expected to be a source of
systematic noise and have never been directly observed in the experiment.

3.2. Co-magnetometer characterization 106
10−10
10−9
10−8
10−7
10−6
Su
pp
ress
ion
Fac
tor
0.001 0.01 0.1 1 10 100 1000
Frequency (Hz)
10−16
10−15
10−14
10−13
10−12
10−11M
easured
Field
(T)
Figure 3.19: Coils wrapped around the entire experiment generated a By magnetic fieldacross the entire experiment.
10−4
10−3
10−2
10−1
100
Fie
ldS
up
pre
ssio
nF
acto
r
0.1 0.2 0.5 1 2 5 10
Frequency (Hz)
dBy/dx
dBy/dy
dBy/dz
dBx/dz
dBz/dz
Figure 3.20: The measured co-magnetometer suppression of gradient magnetic fields com-pared to the signal one would obtain from a constant By field of the same magnitude mea-sured by a non-compensating magnetometer. Colored points on the axis correspond tothe same measurements in the quasi-static limit, with square-wave modulation instead ofsinusoidal modulation.

3.2. Co-magnetometer characterization 107
1
2
5
10
20
50
100
Am
pli
tud
e(f
T/√
Hz)
0.5 1 2 5 10 20
Frequency (Hz)
Signal
Background
Figure 3.21: The measured co-magnetometer suppression of low-frequency magnetic noisegenerated by the magnetic shields.
Magnetic field gradients are also suppressed in the co-magnetometer. The fre-
quency response due to applied magnetic field gradients is shown in Figure 3.20.
The co-magnetometer compensation works locally everywhere in the cell to can-
cel the local magnetic field. After settling for 10 s, the magnetic field gradients
are suppressed by factors of 500 to 5000, depending on the gradient. The smallest
suppression factor comes from the Bx gradient, which is understood by recalling
that Bx fields, together with a small Bz offset, generate signal according to BxB2z .
The largest suppression factor comes from the Bz gradient because the spins are
insensitive to Bz.
Magnetic noise is suppressed by the co-magnetometer just as well as any mag-
netic field. Figure 3.21 shows the noise of the co-magnetometer dropping for fre-
quencies below the 3He resonance at 3 Hz. This allows the co-magnetometer to
have sensitivity to anomalous fields below the magnetic noise generated by the
shields.

3.2. Co-magnetometer characterization 108
−100
0
100
200
300
400S
ign
al(f
T)
0 1 2 3 4 5 6
Pumping intensity (V)
0 500 1000 1500
Pumping intensity Rp (1/s)
Measurement
Bloch Equations
Propagation model
Model with Ly = 170 fT
Figure 3.22: Co-magnetometer signal as a function of pump intensity. The dash-dottedline comes from the earth’s rotation (Equation 2.121), the dashed line adds the propagationmodel from Equation 2.10 and the solid line adds sufficient vertical lightshift to the rotationsignal to match the data.
3.2.3 Intensity dependence
The intensity dependence of the signal is plotted in Figure 3.22. There are three
indistinguishable possible sources of this profile: an anomalous field, a vertical
lightshift and the earth’s rotation. The model curve given by Equation 2.121 for
the earth’s rotation does not properly describe the data in this graph. The model
is greatly improved by adding the pumping rate attenuation due to beam propa-
gation through the cell from Equation 2.10. The magnitude of the measurements
cannot be fully explained by the earth’s rotation; an additional vertical lightshift
can be added to the model to fit the data.

3.2. Co-magnetometer characterization 109
K M
agne
tizat
ion
Mxe (a
rb.)
Time (s)0 1 2 3 4 5
-4
-3
-2
-1
0
1
2
3
Figure 3.23: Transient response to a large 14 tip of the 3He magnetization.
3.2.4 Nonlinear dynamics
All of the dynamics discussed above involve small transverse excitations for which
linear approximations are valid. For large tip angle excitations, nonlinear behavior
arises from the complete set of Bloch equations. Figure 3.23 shows the signal re-
sponse to a large tipping angle pulse. Initially, for t < 3 s the large transverse
component of the 3He magnetization violates the low-field requirement for SERF
operation and significantly reduces sensitivity. As the magnetization returns to the
small-angle regime, the magnetometer regains sensitivity and the signal begins to
increase until the system resembles the linear case. For t > 4.6 s the decay resem-
bles the linear coupled dynamics shown in Figure 3.14.
When the spins are in equilibrium and the K polarization is suddenly reversed,
the 3He spins experience a dynamic instability wherein they spontaneously reverse
direction by executing the transient shown in Figure 3.24. The K polarization is re-
versed by switching between left- and right-circularly polarized light. The initial

3.2. Co-magnetometer characterization 110
0 500 1000 1500Time (s)
0 2 4 6Time (s)
0
2
-2
6
-6
4
-4
Tran
sver
se P
olar
izat
ion P x
e (arb
.)
Figure 3.24: Nonlinear co-magnetometer response to field reversal.
spike in signal corresponds to the spontaneous excitation of 3He precession and
the subsequent shutdown of the SERF sensitivity as soon as the system becomes
nonlinear. The remaining excitation time profile shows how the 3He slowly reori-
ents itself to be aligned with the K spins.
3.2.5 Relaxation rate measurement
The signal response to By modulation as a function of Bz has a standard dispersion
shape and can be used for two purposes: the asymmetry of the dispersion curve
can be used to detect Lz lightshifts and the width of the dispersion curve is a func-
tion of the relaxation rate Rtot. Figure 3.25 shows several of these response curves,
measured for a range of pumping intensities. The dispersion curve observed here
can be derived using the full expression for the signal, Equation 2.121. The relevant
portion of that equation for By modulation is
∂S∂By
=Pe
z Rtot
γe
(Bz
(Rtot/γe)2 + (Bz + Lz)2
)(3.13)

3.2. Co-magnetometer characterization 111
−40
−20
0
20
40
Mo
du
lati
on
Res
po
nse
(mV
)
−50 −25 0 25 50
Compensation Field Bc (µG)
Pp = 0.3 V
Pp = 0.7 V
Pp = 2.0 V
Pp = 5.0 V
0
250
500
750
1000
Res
po
nse
wid
th(1
/se
c)
0 1 2 3 4 5
Pump power Pp (V)
R = (207 1/sV)Pp + (79 1/s)
Figure 3.25: The signal response to By modulation as a function of Bz. In the limit of lowpumping rate, the width of the By modulation response curve gives the spin destructionrate. The line shape is given by Equation 3.13.
The dispersion half-width δB, obtained from fits to a dispersion curve, are con-
verted into a measure of the relaxation rate using Rtot = γ∆B. Figure 3.25 also
shows the measured relaxation rates plotted as a function of pumping rate. The
spin destruction rate can be inferred from the measured relaxation rates in the limit
of zero pumping rate. For these data, the spin-destruction rate was 79 1/s or 12 Hz.
This is higher than, but reasonably consistent with the prediction of Rtot = 57 1/s
from Equation 2.26.

3.3. Zeroing fields and lightshifts 112
3.3 Zeroing fields and lightshifts
It is critical to the operation of the co-magnetometer and the validity of Equation
2.123 that the magnetic field B and lightshift L be maintained at zero. This is partic-
ularly challenging because the co-magnetometer is insensitive to these quantities
when they are all near zero. A modulation technique has been developed to reli-
ably find the zeros of these and other important parameters. The modulation fre-
quency is quasi-steady-state, far enough away from the ∼ 7 Hz resonance of 3He
to validate the steady state solution in Equation 2.121. That steady state solution
for the signal is reprinted here in simplified form for convenience:
S ∼ bny − be
y + Ly +Ωy
γn+
smRm + αRp
γePez
+ Bz
(bey + By
Bn − Lxγe
Rtot
)+
γe
Rtot
(BxBz(Bz + Lz)
Bn − LxLz
)(3.14)
All higher order corrections to this equation have been excluded from this expres-
sion because they do not contribute significantly when the fields are near zero.
3.3.1 Zeroing Bz
Consider modulating By and measuring the signal response. Equation 3.14 simpli-
fies to
Zero Bz:∂S∂By
∝ Bz → 0 (3.15)
Here the signal response, ∂S/∂By, is proportional to Bz and no other fields or light-
shifts. It is possible, therefore, to employ a zero-finding routine that adjusts Bz
until the signal response and Bz are exactly zero. At that zero point, the applied

3.3. Zeroing fields and lightshifts 113
(a) Bz < 0
DS < 0
DS = 0 DS > 0
(b) Bz = 0 (c) Bz > 0Si
gnal
(arb
.)B y
Time (s)0 5 10 15
Figure 3.26: Procedure for zeroing Bz: A square wave modulation of By creates a modu-lation of the co-magnetometer signal. The steady-state response is indicated by the differ-ence between the dashed lines for Bz 6= 0. Note that the signal changes sign as Bz passesthrough zero, allowing the application of a zero-finding procedure. In case (b), when theapplied Bz exactly cancels the 3He and K magnetizations, the signal does not show anysteady state modulation. This illustrates the insensitivity of the co-magnetometer to mag-netic field drift.
Bn exactly cancels all the magnetizations of the atoms in the system as well as any
ambient field generated by the magnetic shields.
The zeroing process is illustrated by the data in Figure 3.26. In the first third
of the sequence, Bz is decreased by 5 µG and the 2 µG By modulation is applied
using a smoothed square wave modulation. After each signal transient decays and
the signal reaches equilibrium, a measurement is made. The measured sections are
averaged and subtracted from one another to obtain a signal amplitude indicated
by the dashed lines. For the first third of Figure 3.26, the modulation produces
a negative signal response. In the last third of the sequence, Bz is increased by
5 µG and the same modulation and measurements give a positive signal response.
There is a point between the positive response and the negative response for which
the applied By modulation produces no signal in steady state. At that point, shown
in the middle of Figure 3.26, Bz is zeroed.

3.3. Zeroing fields and lightshifts 114
Zero
dS/dB
y (a
rb.)
-4
-3
-2
-1
1
2
3
0
-2.0 -1.0 0.0 1.0 2.0Bz (arb.)
(a)(b)
(c)
Figure 3.27: Summary of the data collected in Figure 3.26 including data that extendsbeyond the linear regime described by Equation 3.15. A zero-finding routine samples thiscurve to find the point where the signal response to By modulation vanishes so that Bz = 0.
Similar modulation measurements were made for a wide range of Bz and are
plotted in Figure 3.27. Near the zero point the modulation response is linear in
Bz, in agreement with Equation 3.15. After measuring two data points around
zero, one can fit a line through them and find the value of Bz at the zero intercept,
corresponding to the value of Bz for which the co-magnetometer is insensitive to
changes in By in steady state. This zeroing routine must be executed frequently to
compensate for drifts in the 3He magnetization. When the magnetometer is prop-
erly zeroed, the insensitivity of the magnetometer in steady state is indicative of
the 3He magnetization properly canceling the applied field. In practice, if the first
two measurements are not close to the zero crossing, the zeroing procedure must
methodically map out the curve in Figure 3.27 until it discovers the zero crossing.
Additional information, such as the slope of the curve around zero, can inform the

3.3. Zeroing fields and lightshifts 115
−20
0
20
Sig
nal
(pT
)
3 4 5 6 7 12 13 14 15 16 21 22 23 24 25
Time (s)
Measure
δBy = 2 µG
∆Bz = 5 µG
Figure 3.28: Zeroing procedure for Bz.
zeroing routine about which way to continue its search for a zero crossing and can
help determine whether a zero crossing represents a valid zero.
A numerical simulation of the Bz zeroing routine using the full Bloch equations
is found in Figure 3.28. The modulation responses are measured for positive and
negative Bz detuning in the first two sections. For the last section of data, Bz was set
at the zero intercept of the first two modulation measurements. At that point, the
simulation verifies that the co-magnetometer equilibrium response is insensitive
to applied By.
One must use a smoothed square wave modulation of By at a sufficiently low
frequency that the spin precession transients can decay completely before a mea-
surement of the signal is made. The transient part of the square wave modulation
is not perfectly sharp to reduce excitation of spin precession. The modulation used
in the zeroing routines is given by
B(t) = B0 tanh(s sin(ωt)) (3.16)

3.3. Zeroing fields and lightshifts 116
−5
−2.5
0
2.5
5
Sig
nal
(pT
)
0 0.5 1 1.5 2
Time (s)
−2
−1
0
1
2
By
(µG
)By
Signal
Figure 3.29: Response to a step in the By field after having zeroed Bz.
where s represents the “sharpness” of the modulation and can be adjusted to be suf-
ficiently fast to make expedient measurements but not so fast that the modulation
induces significant transverse excitation. Figure 3.29 shows a simulated response
to a typical modulation profile. The primary advantage of this modulation form
is that all its time derivatives are continuous and it moves between the maximum
and minimum in finite time. The continuity of the derivatives helps reduce unnec-
essary transverse spin excitation, which is important for the timely measurement
of a steady-state effect. It is important for the modulation to move between levels
in finite time because any measurements must be made while the applied fields
are constant.
The magnetic field modulations are created using a 16-bit National Instruments
analog output board in the computer. The ±10 V full range of the output card is
attenuated by a 100 kΩ resistor (20 kΩ for Bnz) and directly drives the magnetic
coils inside the experiment. An ultra-stable, three-channel current source with a

3.3. Zeroing fields and lightshifts 117
mercury battery reference is added to the computer output and is used to find
rough zeros for the magnetic fields, leaving the computer to make refinements. At
the sensitivity level of this magnetometer, the noise level of the output card is sig-
nificant. A switchable time constant filter system is used to filter out the computer
output noise. The filters on each magnetic field control line switch between a very
long > 50 s time constant and a short 100 Hz time constant. The filters are de-
signed to change between slow and fast modes without any disruption to the filter
output levels. The computer switches these filters to the short time constant for
the duration of any magnetic field adjustment. In the modulation measurements
in Figure 3.26, the filters would switch to the fast time constant whenever the mod-
ulation level was moving and quickly switch to the long time constant during the
settling and measurement periods. The filters reduced the noise in the zeroing
routine measurements.
3.3.2 Calibrating the magnetometer
The co-magnetometer signal b is defined to be the magnitude of an anomalous
field in Tesla that couples exclusively to either K or 3He. One would obtain the
same signal from a magnetic field of the same magnitude measured by an identical
magnetometer with the 3He replaced by 4He. Define a calibration constant κ that
converts the K spin response expressed in Equation 2.123 into the magnetic field
quantity b as follows:
b = κS = bny − be
y where κ =Rtot
Pez γe
(3.17)

3.3. Zeroing fields and lightshifts 118
Since an anomalous field cannot be directly applied to calibrate the experiment, κ
is determined by measuring the slope of the line obtained while zeroing Bz. That
line is formed around the zero intercept in Figure 3.27. Combined with the known
amplitudes of Bn and the applied ∆By modulation, the calibration constant can be
expressed as
κ =(
Bn
∆By
d∆SdBz
)−1
(3.18)
where d∆S/dBz is the slope of the response obtained while zeroing Bz. In practice,
the measured signal S is in Volts from the lock-in amplifier and the calibration
accounts for the optical rotation and conversions through the photodiode amplifier
and lock-in amplifier. Although b and S are often used interchangeably for the co-
magnetometer signal in this work, one must multiply the expressions for S by κ to
obtain a result in magnetic field units.
3.3.3 Zeroing By
Once the Bz zero has been found, the remaining fields can be zeroed. By apply-
ing a Bz modulation around it’s newfound zero point (modulating Bn around the
compensation field), one obtains the following response:
Zero By:∂S∂Bz
∝ (bey + By)
1Bn + Lx
γe
Rtot→ 0 (3.19)
Here the quantity being zeroed is the sum of terms with By, Lx and the anomalous
field bey. Note that the BxBz term is suppressed by being the product of two small
factors. The Lx term is zeroed independently at a later stage and the whole proce-
dure is iterated several times. Zeroing (bey + By) does not render the magnetometer

3.3. Zeroing fields and lightshifts 119
−1000
0
1000
Sig
nal
(fT
)
3 4 5 6 7 12 13 14 15 16 21 22 23 24 25
Time (s)
Measure
δBz = 10 µG
∆By = 1 µG
Figure 3.30: Zeroing procedure for By.
insensitive to anomalous fields because it is always sensitive to the difference in
anomalous field coupling as shown in Equation 2.123.
The zeroing procedure for By is simulated in Figure 3.30 using the full Bloch
equations (Equations 2.103) under typical experimental conditions. In the first two
thirds of Figure 3.30, Bz is modulated for two values of By: one above the zero and
one below the zero. The linear fit to these two measurements accurately sets By to
zero; the last third of the plot demonstrates that the steady state response is con-
stant when By is properly zeroed. The total offset to the signal in these simulations
is due to the earth’s rotation. Note how the measurement periods are delayed from
the transients to allow the system to reach equilibrium.

3.3. Zeroing fields and lightshifts 120
0
500
1000
1500
Sig
nal
(fT
)
3 4 5 6 7 12 13 14 15 16 21 22 23 24 25
Time (s)
Measure
δBz = 10 µG
∆Bx = 1 µG
Figure 3.31: Zeroing procedure for Bx.
3.3.4 Zeroing Bx
To isolate the co-magnetometer response to Bx, one must measure the signal re-
sponse to the second derivative of Bz:
Zero Bx:∂2S∂B2
z∝ Bx → 0 (3.20)
This is accomplished by modulating Bz between zero and a non-zero value. If
one were to modulate Bz symmetrically around zero, one would retrieve the same
measurement that was just performed for zeroing By, with the more complicated re-
sponse that is sensitive to Lz and By in addition to Bx. The asymmetric modulation
excludes these terms and isolates the Bx dependence. The By zeroing removes the
linear component of the Bz modulation dependence and the Bx zeroing removes
the quadratic component of the Bz modulation dependence.
The only drawback to the asymmetric modulation measurement is that the mod-
ulation is somewhat sensitive to how well zeroed Bz is. If the 3He magnetization

3.3. Zeroing fields and lightshifts 121
−1
0
1
∂S
/∂
By
(pT
/20
µG
)
−100 −50 0 50 100
Bz (µG)
Lz = 0
Lz = 10 µG
−50
−25
0
25
50
∂S
/∂
Bz
(pT
/10
µG
)
−200 −100 0 100 200
By (µG)
−5
−2.5
0
2.5
5
∂2S
/∂
B2 z
(pT
/∆
Bz)
−100 −50 0 50 100
Bx (µG)
Bz = 1.5 µG, ∆Bz = 5 µG
Bz = 1.5 µG, ∆Bz = 1 µG, S× 10
Figure 3.32: Top: An asymmetric modulation of Bz measures the second derivative ofthe signal response to Bz modulation, which is sensitive to nonzero Bx. For the dashedline, a small offset in the Bz zero causes a slope reversal for sufficiently small modulationamplitude. Middle: A symmetric Bz modulation is sensitive to nonzero By. Bottom: Asymmetric By modulation is sensitive to nonzero Bz. The asymmetry of the response curveis proportional to the pump lightshift Lz.

3.3. Zeroing fields and lightshifts 122
drifts during the zeroing procedures then the asymmetric modulation may not be
starting from Bz = 0, which could lead to finding incorrect zeros for Bx. Figure 3.32
shows the modulation response curves relevant to zeroing each magnetic field com-
ponent. For each point on these curves, the full numerical Bloch equations (Equa-
tions 2.103) were solved. The top plot in Figure 3.32 shows the curve that is being
traversed during Bx zeroing. If the asymmetric Bz modulation is comparable to the
drift in the Bz zero due to 3He magnetization drift, the slope of the zero crossing
can change sign. If the modulation response changes sign due to Bz drift (Figure
3.32, Top, dashed line), then a total of three zeros appear, two of which have the
correct slope but are not the real zero. Thus, it is important to zero Bz immediately
before zeroing Bx and modulate Bz with an amplitude that is significantly greater
than the 3He magnetization drift.
3.3.5 Zeroing lightshifts
With the magnetic fields terms zeroed, the pump and probe beam lightshifts can
be zeroed straightforwardly by exploiting the S ∼ LxLz term. Modulating one
lightshift while zeroing the other allows the zeroing of both:
Zero Lx:∂S∂Ly
∝ Lx → 0 (3.21)
Zero Ly:∂S∂Lx
∝ Ly → 0 (3.22)
The pump lightshift is adjusted by slightly changing the wavelength of the laser
diode. The probe lightshift is zeroed using a Pockel cell to zero the degree of circu-
lar polarization and cancel the birefringence in the beam path before the cell. As
seen previously in Figure 2.18 and Equation 2.136, there is a significant first order

3.3. Zeroing fields and lightshifts 123
signal dependence on the adjustment of the probe circular polarization due to its
retardance and its ability to pump and polarize the spins along the measurement
direction. One must implement a method for measuring and subtracting the “back-
ground signal” of the Pockel cell. In practice, the pump beam is shuttered and the
signal due to the Pockel cell modulation is measured directly. This background sig-
nal is then subtracted from any further measurements involving that same Pockel
cell modulation.
There are two parts to the Pockel cell background signal: the optical rotation
due to probe pumping and the rotation due to retardance. The latter can be de-
scribed by using the following elements of a Jones algebra (Jones, 1941):
Mrot(θ) =
cos θ sin θ
− sin θ cos θ
, Mret(β) =
eiβ 0
0 1
, Mprojy =
0 0
0 1
(3.23)
where Mrot generates polarization rotation by an amount θ, Mret generates retar-
dance of x polarized light by an amount β, and Mprojy takes the projection of the
polarization along y as through a polarizer. A waveplate can be constructed from
these elements:
Mwp(θ, β) ≡ Mrot(−θ)Mret(β)Mrot(θ) (3.24)
The probe beam signal can be modeled including the Pockel cell and the Faraday
modulator using
I =
(
0 1
)Mproj
y︸ ︷︷ ︸y Polarizer
Mrot(φ)︸ ︷︷ ︸Optical Rotation
Mwp(θ, β)︸ ︷︷ ︸Pockel Cell
Mrot(α sin(ωmt))︸ ︷︷ ︸Faraday Modulator
1
0
︸ ︷︷ ︸
x Polarized
× c. c.
(3.25)

3.3. Zeroing fields and lightshifts 124
With the Pockel cell at an angle θ = φ/4, the first harmonic signal is, to leading
order,
S ∝ Iωm ' 2αφ
(1− β2
2
)(3.26)
Here the Pockel cell β modulation only appears in second order. First order de-
pendence appears, however, in the general case where additional birefringence of
retardance β2 at a different angle θ2 = π/8 is introduced in the path of the probe
beam:
S ∝ Iωm ' 2αφ
(1− β2
2
)+
−√2αββ2︸ ︷︷ ︸Linear in β
−αβ22
2+
αβ2β22
4
(12
+ φ
)+ · · · (3.27)
where terms up to second order have been included; higher order terms are in-
significant for small β, β2, α, and φ. The small angle approximations in this anal-
ysis are valid because typical Faraday modulation is α ' 5 and typical Pockel
cell modulation is β ' π/200. Thus, modulating the Pockel cell retardance β gen-
erates a background signal modulation that is linear in β and β2. This first order
background signal must be measured and subtracted from measurements involv-
ing Pockel cell modulation.
There is, however, an alternative procedure for zeroing the probe lightshift that
relies entirely on zeroing the pumping rate of the probe beam light. This scheme
works because the probe circular polarization, the probe lightshift and the K po-
larization due to probe beam optical pumping are all directly related; if one of
these is zeroed, they are all zeroed. In variables, the previous sentence translates
as Pex ∝ sm ∝ Lx. Slightly left- or right-circularly polarized light optically pumps
the K atoms parallel or anti-parallel to the probe beam. This polarization induces
optical rotation of the probe beam, which provides a signal. This signal, plotted

3.3. Zeroing fields and lightshifts 125
−250
−200
−150
−50
0
50
Sig
nal
(fT
)
−40 −20 0 20 40
Bz (µG)
By = 20 µG
Bx = 20 µG
−500
0
500
1000
1500
2000
Sig
nal
(fT
)
Lx = 2.3 pG
S× 100; Ω = Ω⊕
Figure 3.33: Signal response to Bz scans with Bx, By and sm offsets with no pumping light.The probe beam pumping becomes the dominant pumping effect and gives a strong signalat zero field.

3.3. Zeroing fields and lightshifts 126
−500
0
500
1000
1500
Sig
nal
(fT
)
3 4 5 6 7 12 13 14 15 16 21 22 23 24 25
Time (s)
Measure
δBz = −50 µG
Rp = 0
∆Lx = 2.3 pG
Figure 3.34: Zeroing procedure for Lx.
as a function of Bz in the top plot in Figure 3.33 has a strong peak around Bz = 0
whose amplitude is proportional to the polarization. The relevant portion of the
signal comes from Equation 2.121:
S(sm, Bz) =smRmRtot
R2tot + γ2
e B2z' sm
Rm
Rtot
(1− γ2
e B2z
R2tot
)(3.28)
where the last step is only valid for small Bz; for large Bz, the signal vanishes. The
zeroing procedure, shown in Figure 3.34, involves tuning the Pockel cell to adjust
sm while comparing the amplitude of this peak to a background point at large
nonzero Bz > 50 µG where the signal is strongly suppressed. When the amplitude
of the peak is equal to the background level, the probe polarization and, thus, the
probe lightshift have vanished. The term being zeroed can be expressed as
Zero Lx:∂2S∂B2
z
∣∣∣∣Rp=0
∝ sm ∝ Lx → 0 (3.29)

3.3. Zeroing fields and lightshifts 127
where the second derivative, in practice, indicates an asymmetric modulation. The
main advantage of this method is that it works with the pump beam shut off and
provides a clear signal with an unambiguous zero that is largely independent of
any other nonzero parameters. The main disadvantage of this measurement is
that it does not directly zero the LxLz signal due to the overlapping parts of the
pump and probe beams. If there are spatial nonuniformities in the lightshift of the
probe beam, then the polarization method will zero the entire probe beam average
lightshift whereas the zeroing Lx using the LxLz method will zero just those parts
of the probe beam that actually participate in the measurement.
3.3.6 Zeroing the pump-probe nonorthogonality
The co-magnetometer signal has first order sensitivity to the pump-probe beam
nonorthogonality angle α (Equation 2.135). The nonorthogonality can be zeroed
by considering the intensity dependence of terms contributing to the signal: ac-
cording to Figure 2.19, in the limit of high pumping rate, nonzero α generates a
signal while virtually all other imperfections are suppressed. The vertical light-
shift could also contribute at high intensity but it should be suppressed because
all the incident light dominantly propagates in the horizontal plane with zeroed
lightshift. By modulating the pump beam intensity between zero and high pump-
ing rates, the amplitude of the modulated signal is proportional to α. The concept
of this zeroing routine is to turn the K polarization on and off and adjust the rela-
tive angle of the pump and probe beams until the presence or absence of K spin
polarization has no effect on the probe beam, at which point the pump beam and
its polarization is orthogonal to the probe beam.

3.3. Zeroing fields and lightshifts 128
−200
0
200
Sig
nal
(fT
)
3 4 5 6 7 12 13 14 15 16 21 22 23 24 25
Time (s)
Measure
δRp = 0 ↔ 1300 1/sec
δBz = −100 µG
∆θm = 10 µrad
Figure 3.35: Zeroing procedure for pump-probe non-orthogonality.
In practice, however, the pump beam cannot achieve the limit of high pumping
rate where all the other terms do not contribute to the signal. Thus, the zeroing
routine is sensitive to terms that are not fully suppressed at high pumping rate.
The relevant terms that contribute to the zeroing modulation are
Zero α:∂S
∂Rp
∣∣∣∣Rp=Rbackp
Rp=0∝ αK
Rp
Rtot+ (bn
y − bey + Ωy/γn)
Rp
R2tot→ 0 (3.30)
where K is a calibration factor that converts pump-probe misalignment into signal
units. The signal due to anomalous fields and the earth’s rotation are suppressed
by a factor of 1/Rp in the limit of high pumping rate. They are nonetheless signifi-
cant for finite pumping rate in this zeroing routine.
The zeroing procedure is simulated in Figure 3.35. In an ideal configuration,
the signal at zero pumping rate would not have dependence on any parameters.

3.3. Zeroing fields and lightshifts 129
However, the pumping rate does not actually reach zero because of 3He spin ex-
change pumping; with the pump beam blocked, most parameters retain some sig-
nal dependence. To avoid this dependence when the pump beam is modulated
off, a strong Bz field of 100 µG is applied to suppress the sensitivity to the other
parameters. Thus, at the Rp = 0 side of the modulation, the sensitivity to system
parameters is negligible. At the high pumping rate side of the modulation, the sys-
tem is sensitive to the parameters in Equation 3.30. By steering the pump or probe
beam, the modulated signal can be zeroed. The carefully designed set of beam
attitude control lenses for the probe beam allows the probe beam to be steered us-
ing the variable wedge (the deviator) without translation on the cell (see Section
3.1.3). This setup is ideally suited for zeroing the pump-probe non-orthogonality.
If there were no rotation or anomalous fields, then this zeroing routine would set α
exactly to zero. In practice, however, α is set to cancel the suppressed but nonzero
contributions from anomalous fields and rotation.
Figure 3.36 illustrates how this zeroing routine suppresses sensitivity to anoma-
lous fields. In a perfectly aligned system, an anomalous field (or, equivalently, the
earth’s rotation), would create the signal profile given by the solid line. In the
absence of an anomalous field, nonzero α generates a signal profile given by the
dashed line. The zeroing routine compares the zero signal level at Rp = 0 to the sig-
nal level at high pumping rate and sets α such that those signal levels are the same.
With an anomalous field in the system, finding this zero sets α such that it cancels
the anomalous field signal contribution at high pumping rate. These contributions
are smaller by about 1/3 than their contributions at the peak sensitivity. Although

3.3. Zeroing fields and lightshifts 130
0
0.25
0.5
0.75
1
Sig
nal
(arb
.)
0 500 1000 1500 2000
Pumping rate (1/sec)
CPT signal
α sensitivity
CPT signal, α zeroed
Figure 3.36: In this simulation, the co-magnetometer sensitivity peaks at Rp = 240 1/s.The sensitivity to pump-probe nonorthogonality is maximized at high pumping rate. Thedotted vertical lines at Rp = 350 and Rp = 2000 represent the normal and backgroundpumping rates. This plot is a subset of Figure 2.19.
the entire sensitivity to anomalous fields is not removed, the sensitivity is nonethe-
less suppressed. After zeroing the modulation response, the resulting sensitivity
to anomalous field is given by the dash-dotted line which passes through zero at
the high pumping rate point where it was zeroed.
To quantify the sensitivity suppression due to this zeroing routine, consider a
zeroed system for which the pump-probe nonorthogonality α compensates for an
anomalous field b. The offset in α is
α = − bKRback
tot(3.31)
Compared to the signal S in the perfectly aligned α = 0 case, the signal SZα for α at
this offset is suppressed by a factor ηα:
ηα =S
SZα=
b Rp
R2tot
αK RpRtot
+ b Rp
R2tot
=1
1− RtotRback
tot
(3.32)

3.3. Zeroing fields and lightshifts 131
The ratio of the total relaxation rates for the background (high intensity) and nor-
mal pumping rates, Rtot/Rbacktot , can be obtained by measuring the sensitivity cali-
bration constant κback at high intensity in the same way that the normal calibration
constant is measured. The definition of the calibration constant is
κ =Rtot
Pez γe
=R2
totRpγe
(3.33)
where the last step used the expression for the polarization in Equation 2.8. Then
the ratio of the relaxation rates is
Rtot
Rbacktot
=
√κ
κback
Rp
Rbackp
(3.34)
Although the exact values of the normal and background pumping rates are not
known, the ratio Rp/Rbackp is well known. Thus, the suppression factor is
ηα =
(1−
√κ
κback
Rp
Rbackp
)−1
(3.35)
For a majority of the data since high intensity background zeroing started, the
background intensity is exactly Rp/Rbackp = 8 times larger than the nominal inten-
sity. The experiment typically obtains κback/κ ' 3, making the signal suppression
factor ηα ' 1.25. The experiment normally measures the suppressed signal SZα,
so one must multiply this signal by ηα to obtain the actual anomalous field. It is
convenient to define a new calibration factor κ′ = ηακ for the anomalous signal
obtained during long term data acquisition.
3.3.7 Zeroing sequence
The zeroing routines discussed in this section are run periodically during data ac-
quisition to maintain the zero of all relevant parameters. The 3He polarization is

3.3. Zeroing fields and lightshifts 132
very sensitive to experimental conditions and is subject to drift. The probe beam
steering also drifts faster than other parameters. Thus, every 100 s, this zeroing
sequence is executed:
Minor zeroing sequence: Bz α (3.36)
wherein the Bz magnetic field is zeroed followed by the pump-probe non-ortho-
gonality. Every 30 minutes a more elaborate zeroing routine is executed to zero all
the other parameters. Since Bz multiplies most of the terms in Equation 2.121, Bz
must be re-zeroed frequently, especially before zeroing other terms. The complete
zeroing sequence is currently
Major zeroing sequence: Bz By Bz Lx Bz Bx Bz α Bz (3.37)
The major zeroing sequence is repeated several times and the zeroing results are
averaged to reduce noise. It is particularly important to iterate over the By and Lx
zeroings because the former is dependent on the zero of the latter.
3.3.8 Anomalous field dependence
The sensitivity to anomalous fields is quite robust and is not eliminated by the
magnetic shields or the magnetic field zeroing procedures. The basic mechanism
for the sensitivity to anomalous fields is the differential precession of the K and
3He spins. If an anomalous field couples to K and not 3He (pure be), then the K
will precess independent of the 3He. If an anomalous field couples to 3He and not
K, then the 3He will move to cancel the anomalous field, but will introduce a real
transverse magnetic field that the K, seeing no anomalous field, will respond to.

3.3. Zeroing fields and lightshifts 133
Zeroing “By” always actually zeroes the sum (bey + By). This does not render
the magnetometer insensitive to anomalous fields because the signal is always sen-
sitive to the difference of the anomalous field couplings, S ∼ bny − be
y (Equation
2.123), regardless of the other magnetic fields involved. Even if the By field is set at
a finite value to cancel the anomalous field bey, the By sensitivity is suppressed by a
small Bz term. The steady state equation is still valid, and the signal, proportional
to the difference in nuclear and electron couplings, is unattenuated.
The magnetic shields operate using electron spin. A regular magnetic field
aligns the spins in the magnetic shield and the electron magnetization, which is
anti-parallel to the spin, cancels some of the incident field. These shielding elec-
trons will perceive the electron coupling of the anomalous field bey and react with
a regular magnetic field that cancels that component of the anomalous field. The
co-magnetometer, however, perceives the sum of the anomalous field and the op-
posing magnetic shield field. Since the co-magnetometer is only sensitive to the
difference in coupling of the anomalous field, the co-magnetometer will suppress
the shield field (3He will move to cancel it) but will remain fully sensitive to the
anomalous field.

Chapter 4
Signal analysis and systematic effects
THE SUPPRESSION of long-term systematic noise in the co-magnetometer sig-
nal is essential to the success of this experiment. The approach to reducing
systematic effects has two prongs: (1) a source of signal drift is accurately character-
ized and measured so that it can be subtracted from the signal during data analysis,
and (2) the source of signal drift is controlled or renovated until it is no longer a
dominant source of drift. In practice, these two prongs progress in parallel and
inform each other. Diagnostic measurements that correlate with the signal help
locate sources of systematic noise, which, in turn, lead to better measurements of
the sources of noise and more successful experimental solutions to minimize the
noise.
The zeroing routines described in the previous Chapter render the experiment
insensitive to field, lightshift and pump-probe angle drift. The techniques de-
scribed in this Chapter minimize sensitivity to a variety of other effects including
134

4.1. Signal acquisition 135
birefringence in the optics, dichroism of the cell, cell temperature, nonuniformities
in the cell, and imperfections amplified by the zeroing routines.
4.1 Signal acquisition
The co-magnetometer signal is measured continuously over the course of several
days to determine the amplitude of several sidereal periods. A computer reads the
output of the lock-in amplifier that measures the optical rotation of the probe light
through the co-magnetometer cell. The computer simultaneously reads in about 50
other channels of data from various sources such as temperature sensors, intensity
monitors and position monitors. These additional data are used to analyze the
systematic effects appearing in the signal.
4.1.1 Background subtraction
During data acquisition of the co-magnetometer signal, the pump beam intensity
is periodically changed to make background measurements. The background mea-
surements are designed to remove systematic noise from the experiment by chang-
ing the intensity from the normal operating intensity to an intensity—higher or
lower—for which the co-magnetometer is not sensitive to the anomalous field. In
earlier data sets, before 1843 sd, the background measurements were taken with
the pump beam shut off. In an ideal case with no pumping or K polarization, the
signal is simply a function of the probe beam polarization. Drift in the polariza-
tion angle due to the optics moving slightly or the table twisting is measured as

4.1. Signal acquisition 136
the background signal. These background measurements remained sensitive, how-
ever, to various parameters because of the small yet significant 3He spin-exchange
pumping rate. It is again useful to consult Figure 2.19 and note that small imperfec-
tions in almost every parameter have very strong dependence on the signal close
to zero pumping rate.
More recently the background measurements were changed to increase the
pump beam intensity by a factor of 8 to 10 over the normal intensity. In the
limit of high pumping rate, the K polarization is pegged along the direction of
the pump beam and is insensitive to any other parameters. Thus, the high inten-
sity background measurement includes both the pump-probe nonorthogonality
drift and the probe polarization drift. The only drawback to this method is that
the pump beam cannot practically reach the intensity necessary to render the co-
magnetometer insensitive to all parameters. Indeed, at just 8 times higher than
the normal operating intensity, the magnetometer signal is only about 2.5 times
less sensitive to anomalous fields (see Section 3.3.6). Thus, subtracting off the high
intensity background measurements from the signal tends to reduce sensitivity to
anomalous fields. However, if the pump-probe orthogonality zeroing routine has
already found the point of zero signal at high pumping rate, then the background
measurement will not remove any additional signal. Thus, the only sensitivity
correction that needs to be made while running the experiment is due to the pump-
probe nonorthogonality zeroing routine.
Figure 4.1 shows the raw co-magnetometer data with the periodic background
measurements. The normal signal is typically recorded for 10 seconds, followed

4.1. Signal acquisition 137
0 10 20 30 40 50 60
Time (s)
−1000
0
1000
Sig
nal
(fT
)
1981.001 1981.0012 1981.0014 1981.0016
Time (Sidereal Days)
Raw signal
Signal background subtracted
Figure 4.1: 66 s of raw data (solid) coming from the magnetometer, showing backgroundperiods for a duty cycle of ∼ 33%. Background periods are individually averaged anda background spline curve is subtracted from the raw signal to give the background-subtracted signal (dotted).
by a few seconds of background measurement. Each period of background mea-
surement is averaged down to a single point in signal and time. These background
points are fit to a spline curve and that spline is subtracted from the signal. The
background data average excludes the first 0.5 s of transient decay. Likewise, the
background-subtracted signal excludes the entire background plus the following
0.5 s of transient.
By varying the fraction of the time the pump beam is on during the background
measurement, one can control the equilibrium 3He magnetization. A PID feed-
back system (including proportional, integral and differential terms) takes mea-
surements of the 3He polarization from the Bz zeroing procedure and makes adjust-
ments to the background measurement time, thereby fixing the 3He polarization
to a desired value. Although the experiment nominally works at any polarization,

4.1. Signal acquisition 138
0 2 4 6 8
Time (min)
−1000
0
1000
Sig
nal
(fT
)
1981.001 1981.002 1981.003 1981.004 1981.005 1981.006
Time (Sidereal Days)
Raw signal
Signal background subtracted
Figure 4.2: Several minutes of raw data show gaps wherein zeroing procedures are per-formed to (1) keep Bz at zero and adjust for drifting 3He polarization and (2) main-tain pump-probe orthogonality. Note that after each zeroing period, the duty cycle isadjusted—in this case rather dramatically—to maintain a set 3He polarization. This sec-tion of data was also chosen to show that fluctuating background levels can be removedfrom the signal.
changes in polarization can contribute to the signal through various imperfections
and non-orthogonalities. Furthermore, there is clear empirical evidence that drift-
ing polarization directly correlates with the co-magnetometer signal even when
the changing calibration is correctly applied to the data.
4.1.2 Zeroing schedule
Every 100 seconds, the data acquisition pauses to zero the parameters that drift
the fastest and that are the most critical to the signal stability (the minor zeroing
routines). The Bz zeroing routine is always executed during this pause because
the 3He polarization is constantly drifting. This zeroing routine also provides the

4.1. Signal acquisition 139
sensitivity calibration constant and sets the background duty cycle through the
background PID algorithm. More recently, the pump-probe non-orthogonality has
also been included here to maintain the pump-probe orthogonality. Both pump
and probe beams sometimes drift on 10 minute timescales, so it is important to
include them here. Figure 4.2 shows a sample of the raw signal across several of
these minor zeroing routines. This selection of data shows how the duty cycle was
dramatically adjusted in an effort to maintain the 3He polarization. There is also
a significant drift in the raw signal that is removed by the background subtraction.
In this case, the horizontal position of the pump laser was wandering across the
cell.
The background periods continue unabated throughout the zeroing routines.
After each modulation measurement the pumping intensity is set to the backgr-
ound level for a period to maintain Bz throughout the zeroing routines. A timer
measures the time since the last background and calculates the appropriate amount
of background time to maintain the appropriate duty cycle. The PID algorithm is
normally allowed to set the background duty cycle between 15% and 60%. The
lower limit makes sure that sufficient data is taken during the background measure-
ment. The duty cycle is typically set to somewhere near the middle of this range.
Certain zeroing routines, however, require compensation for spending significant
fractions of their time with the pump beam off or at high intensity. Empirically
determined compensation factors are assigned to each zeroing routine to increase
or decrease the duty cycle. These compensation factors are allowed to reduce the
duty cycle above the upper limit and below 0%, in which case the pump beam is
turned off to kill polarization (if the backgrounds are normally at high intensity).

4.1. Signal acquisition 140
0 5 10 15 20 25
Time (hours)
−50
−25
0
25
50
Sig
nal
(fT
)
1915 1915.2 1915.4 1915.6 1915.8
Time (Sidereal Days)
Sinusoidal fit: 1.2 ± 0.3 fT, 0.66 ± 0.04 sd
Figure 4.3: One full day of raw data shows gaps wherein periodic, full zeroing proceduresare performed to zero all the fields, lightshifts, and laser beam orthogonality.
After 30 minutes (and previously up to a few hours) of alternating between
data acquisition and the minor zeroing routines, the complete, major zeroing rou-
tines are executed. These zeroing routines find the zero of all possible parameters
and are repeated several times. Figure 4.3 shows the gaps where this major zeroing
takes place. The anomalous field would appear in this data as a sinusoidal varia-
tion with a period of 1 sidereal day. For this run alone, one might infer that the
anomalous field is b ' 1.2± 0.3 fT; however, there are many sources of systematic
noise that could contribute to a false signal. In the following section, various ob-
served systematic drifts will be discussed. Further details regarding the analysis
can be found in Section 4.3.

4.2. Systematic Noise 141
4.2 Systematic Noise
The dominant sources of systematic noise in this experiment involve imperfections
associated with the pump and probe beams. In particular, pump and probe mo-
tion generate systematic noise whenever their relative angle drifts or whenever
their overlap changes. These and other significant sources of systematic noise that
have been identified are presented in this section. Various solutions to reduce the
sensitivity to each source of systematic noise are discussed. The section is broken
into systematic effects that have been addressed and systematic effects that remain
unresolved.
4.2.1 Systematic effects with implemented controls
Birefringence
Slight changes in the birefringence of the optics along the probe beam path, as
temperature or beam position drift, can cause significant systematic error. The bire-
fringence of the optics causes the probe beam to be slightly circularly polarized. In
the absence of any atoms, this birefringence has a rotation component that directly
contributes to the signal. The background measurements every 10 s, whether at
zero or high pumping rate, do an excellent job of removing the polarization off-
set. The birefringence also generates a probe lightshift Lx and significant probe
pumping. Although Lx is nominally suppressed to first order, the probe pump-
ing contributes to the signal in first order. The Lx zeroing routine explicitly zeroes
these contributions to the signal.

4.2. Systematic Noise 142
Probe Beam
PolarizationRotation
Cell
Sweet Spot
Figure 4.4: An off-axis probe beam passing through the cell experiences linear dichroismdepending on the angle at which it hits the cell wall, thereby rotating the angle of polariza-tion of the light that passes through. The dichroism vanishes for the probe beam passingthrough the center of the cell. This is called the “sweet spot.”
Cell dichroism
The co-magnetometer cell has two effects on the probe beam. First, the cell walls
possess birefringence due to stresses induced by the high pressure 3He buffer gas,
temperature gradients and built-in stresses from fabrication. This birefringence,
the same as any birefringence, is eliminated via the backgrounding and Lx zeroing
techniques. Second, if the probe beam passes through the cell off-center, motion of
the probe beam can translate into polarization rotation. As depicted in Figure 4.4,
the transmitted probe beam experiences some linear dichroism due to the different
amounts of reflection off the cell wall for light polarized in the plane of reflection
and perpendicular to the place of reflection. The transmitted light polarization an-
gle is effectively rotated as the beam passes through different parts of the cell. As
such, random probe beam motion across the cell, caused for example by air tur-
bulence, translates into angular noise. However, if the probe beam passes exactly
through the center of the cell, this effect vanishes to first order in the probe beam

4.2. Systematic Noise 143
motion. In that alignment, the beam passes through the so-called “sweet-spot” of
the cell. The set of optics before the cell for the independent rotation and transla-
tion of the probe beam (see Section 3.1.3) was designed specifically to more easily
locate the sweet spot.
Pump-probe angle drift
If the angle between the pump and the probe beams changes then the K polariza-
tion projection onto the probe beam would change accordingly. This effect is hard
to distinguish from precession under the influence of an anomalous field. The ori-
entation of the pump and probe beams is measured by four segment photodiodes
and can be directly removed from the signal as demonstrated in Figure 4.12. When
the pump-probe nonorthogonality zeroing routine was implemented, the sensitiv-
ity to beam drift was significantly suppressed. The remaining sensitivity may be
attributed to nonuniformities that are discussed below.
Zero pumping rate measurements
In addition to the the normal and high (background) pumping rate modes, the
experiment occasionally entirely shuts off the pump beam to make certain mea-
surements. This is currently used to zero the probe lightshift. In the likely chance
that the probe beam has nonuniform circular polarization and lightshift, zeroing
Lmx in the dark only provides the unweighted average zero probe lightshift. The
probe lightshift that participates in the co-magnetometer signal, Lx, is given by
the lightshift only within the pump-probe overlapping volume and is weighted ac-
cording to the nonuniform sensitivity curves discussed later with Figure 4.6. There

4.2. Systematic Noise 144
Time Spin Orientationsd sign(Pz)
< 1818 +1818 −1857 +1886 −1900 +1934 −1961 +
Table 4.1: Times indicating the reversal of the spin polarization.
are a variety of conditions under which Lx 6= Lmx . In this light, it would be ideal
to zero the probe lightshift using pump lightshift Lz modulation. Although the
pump lightshift cannot be reliably modulated with the single mode pump laser, it
will become possible in the future with a DFB pump laser.
In general, it is desirable to avoid using different pumping intensities to per-
form zeroing and background measurements since they always measure some-
what different volumes and are thereby sensitive to nonuniformities.
Diurnal variations
Systematic noise and drift is largely driven by environmental cycles linked to the
solar day. The barometric pressure and temperature both experience daily cycles
that can affect the experiment. Details on thermal sensitivity are discussed below
in Section 4.2.3. One way to differentiate diurnal and sidereal signals is to wait
several months for the two signals two separate. A far more expedient method is
to reverse the polarization of the spins. Reversing the spins changes the sign of the
co-magnetometer signal while many other systematic effects remain unaffected. In

4.2. Systematic Noise 145
Table 4.1, the times of these spin reversals is recorded. When the spins are reversed,
the calibration constant gains a negative sign to account for the opposite signals so
that all data is directly comparable in long-term data analysis.
4.2.2 Unresolved systematic effects
Cell temperature fluctuations
Cell temperature fluctuations of about 100 mK are sometimes observed. If the
density of the vapor is too high, then small changes in the density can create mea-
surable shifts in the signal: The pump beam has a relatively short optical depth
of < 1 cm and fluctuations in the K density would cause parts of the cell to be
pumped more or less. The probe beam experiences fluctuating absorption and
rotation signals with fluctuating temperature. The latter is particularly problem-
atic if the probe beam has a large steady-state optical rotation signal. In principle
these changes would be compensated at every point in time by the calibration. In
practice, however, the calibration does not compensate for the signal fluctuations
because the fluctuations happen faster than an accurate calibration can be estab-
lished. These correlations were observed with 1.6 pT/C while running at 170C
(Run 1789.82 sd); they were sufficiently reduced by operating at 160C.
Interference
Optical interference in the probe beam can attenuate the probe beam intensity and
thereby attenuate any nonzero signal. Furthermore, an interference pattern across
the beam profile causes different parts of the beam to be attenuated and thereby

4.2. Systematic Noise 146
Net vertical lightshift back-reflection
No net vertical lightshift
Figure 4.5: Vertical misalignment of the pump or probe beam could cause first order sensi-tivity to pump lightshift. In the second case depicted, the net back-reflection of the beamhas a significant vertical component.
causes shifting, nonuniform sampling of the cell. Interference is sensitive to wave-
length, beam motion and, in general, thermal expansion and thermal displacement
of optical elements. As temperature drifts, interference fringes are sometimes ob-
served as a sinusoidal modulation of the signal on one hour timescales. One pos-
sible source of interference is the Faraday rod, which has two flat, coated surfaces.
Even if the coating was 1% reflective, a 1% modulation of the signal could be sig-
nificant. The current solution for the Faraday rod is to cut, re-polish and re-coat
one end at a small angle. In general, elements that generate interference would
be highly sensitive to temperature. As with the cell temperature and density, this
effect is difficult to compensate using the sensitivity calibration alone because the
calibration measurement is usually rather noisy on the timescales that interference
appears.
Vertical lightshift and back-reflection
The vertical misalignment of pump and probe beams may contribute to the signal
drift by generating first-order sensitivity to pump and probe lightshifts. The probe
beam produces lightshift of about dLx/dλ ∼ 0.3 fT/pm for 0.5% circular polariza-
tion. At that level, the vertical component of the lightshift due to misalignments

4.2. Systematic Noise 147
is insignificant. The lightshift due to vertically steering the pump beam is elim-
inated when the magnetic fields are realigned so that they’re pointing along the
direction of the pump beam. However, the pump beam can reflect off the back of
the cell as shown in Figure 4.5. According to Figure 2.5 the pump beam intensity
is reduced by more than a factor of 10 through the cell and perhaps only 1% of that
gets reflected back into the cell. Even if the pump intensity is reduced by a factor
of 1000 for the back-reflected light, there is still sufficient light to provide a vertical
lightshift of about dLy/dλ ∼ −12 fT/pm (see Equation 2.89).
Nonuniform sensitivity
According to the models, with consistent zeroing of all the fields and α, the signal
should not be sensitive to any aspect of the pump or probe beams to first order.
Those aspects include their wavelengths, their positions and relative angle. The
vertical angle of the probe beam should have no effect on the signal measurement
whereas the vertical angle of the pump beam would temporarily create Ly until
the zeroing routines had a chance to realign the magnetic fields along the K polar-
ization direction. Thus, the system is designed to be perfectly insensitive to pump
and probe motion. Despite all this, the experiment remains somewhat sensitive to
pump beam motion and to a lesser extent probe beam motion.
Nonuniformities can explain the residual sensitivity to the many parameters
that are supposedly suppressed. Whenever the volume being measured changes
during zeroing or data acquisition, systematic signals can appear. There are two
ways that the effective measurement volume can change: the first occurs when the
pump and probe beam overlap changes or moves around due to beam drift (see

4.2. Systematic Noise 148
0.2
0.4
0.6
0.8
1
1.2
Sen
siti
vit
y∝
Pe/
Rto
t(a
rb.)
0 0.5 1 1.5 2 2.5
Distance in Cell (cm)
Low Rp = 0.5Rsd
Nominal Rp = 1.8Rsd
Background Rp = 14Rsd
Figure 4.6: Magnetometer sensitivity is given by the ratio of the alkali polarization to thetotal pumping rate. Using the data for pumping rate and polarization in Figure 2.5 (orfrom Equations 2.8 and 2.10), one can obtain this relative measure of the magnetometersensitivity along the pumping direction z through the cell.
the next section) and the second occurs when changing the pump beam intensity
shifts the area of maximum sensitivity around.
To understand how the sensitivity can move around as a function of pump-
ing intensity, first refer back to Figure 2.5 to see that polarization drops by 50%
through the cell. Over the width of the probe beam (' 1 cm), the nominal pumping
rate drops by more than a factor of 1.8. The decreasing polarization and pumping
rates along z through the cell cause the magnetometer sensitivity to vary somewhat
across the cell according to Figure 4.6. Because both the polarization and pumping
rate decrease with depth into the cell, the magnetometer sensitivity varies much
less than either alone. Across a 1 cm wide probe beam centered on the cell, the
sensitivity does not change more than 10% at the normal or high (background)
pumping rates. At the nominal pumping rate, a maximum in the sensitivity ap-
pears in the middle of the cell, corresponding to the optimum pumping rate. At

4.2. Systematic Noise 149
high pumping rate, the maximum sensitivity is near the rear of the cell; the sensitiv-
ity increases as the pump beam is attenuated through the cell and approaches the
optimum pumping rate towards the rear of the cell. Thus, the presence of nonuni-
formities in the cell could become a significant issue since the nominal and high
(background) pumping rate measurements emphasize the center and back edge of
the cell, respectively.
Not only does the pump beam intensity change the z location of the sensitivity,
it can also dramatically change the sensitivity profile along x. Pump light propa-
gating through the cell is attenuated at the edges due to lensing by the cell walls
and in the center where the pump beam has the greatest distance to travel through
the absorptive atomic vapor. This creates two areas of peak sensitivity along x; ap-
pearing on both sides of the center. By increasing the incident pump beam intensity,
the region of sensitivity is expanded towards the edges and towards the center. For
the areas near the edges of the cell where the pumping rate is particularly low due
to lensing, the signal is a strong function of various parameters.
There are two major consequences of nonuniform and shifting sensitivity: First,
any time intensity modulation is used in a zeroing routine, the average volume
being zeroed changes. Since the volume being zeroed is not the same as the volume
being measured during normal operation, the magnetometer may not be properly
zeroed for normal operation. Second, since the regions of sensitivity are different
at normal and high (background) pumping rates, background subtraction can only
partially compensate for the changes in the pump and probe beam misalignments
and intensity profiles.

4.2. Systematic Noise 150
Nonuniform K polarization
The K polarization drops by more than 50% across the cell due to the pump beam
absorption as it propagates through the cell. This gradient in the K polarization
makes it impossible for Bz to be zero everywhere in the cell. Thus, the co-magneto-
meter has some (small) first order sensitivity to many parameters. Indeed, the
zeroing routines find the zero of the spatial-average signal due to the application
of uniform fields. However, the co-magnetometer with the K polarization gradient
would retain first order sensitivity to nonuniform and gradient fields that are in
any way spatially distinct from the applied uniform fields used in zeroing. One
possible way to reduce this sensitivity would be to apply an appropriate gradient
field dBz/dz to do a better job of zeroing Bz throughout the cell. The total amount
of polarization gradient can also be reduced if the vapor were less optically thick.
Despite the first order sensitivity, the zeroing routines should be able to find the
average zero field—even with applied gradients—such that the long-term signal
does not respond to an applied gradient. There is no evidence that this effect has
contributed to the noise so far.
Nonuniform pump-probe overlap
Another aspect of spatial nonuniformity is the possibility for the active, overlap-
ping volume of the pump and probe beams to change significantly over time. If
the pump and probe beams are only partially overlapping, then the drift in the posi-
tions of the pump and probe beams will cause the total amount of signal to change
over time. That drift should be accurately reflected in the calibration, although the
calibration is too noisy to be used for corrections on timescales faster than a few

4.2. Systematic Noise 151
−400
−200
0
200
400
Sig
nal
(fT
)
1966 1968 1970 1972 1974
Time (Sidereal Days)
26.75
27
27.25
27.5
27.75
28
Tem
peratu
re(C
)
Signal
Pump pinhole temperature
Pump horizontal angle
Figure 4.7: Temperature in the room is strongly correlated with the signal and the pumpbeam position. The correlation is about 600 fT/C. This inspired the thorough investigationinto the temperature dependence of various components in the experiment.
hours. Thus, it is important to expand the pump beam sufficiently so that small
changes in orientation do not significantly alter the sensitivity in the volume of the
probe beam passing through the cell.
4.2.3 Thermal sensitivity
Many sources of long term drift are ultimately due to thermal drift of temperature-
sensitive components. Although it is easy to see the correlation between ambient
temperature and signal, it can be very difficult to pinpoint which component is
dominantly sensitive to temperature. In Figure 4.7 the room temperature clearly
correlates with the pump horizontal position and the co-magnetometer signal. Fit-
ting the temperature data to the signal gives a thermal sensitivity of about 600
fT/C. This very large sensitivity, coupled with typical temperature drifts that are,
at best, δT ∼ 0.2C, swamps any signals of interest at the 1 fT level. Furthermore,

4.2. Systematic Noise 152
these temperature drifts often follow the diurnal cycle of the building air condi-
tioning and thus would significantly contribute to the sidereal component of the
signal.
The signal correlation with the pump horizontal position in Figure 4.7 narrows
the possible sources down to about 15 possible optical elements in the path of the
pump beam. Beyond that, it is impossible to tell which element(s) contribute the
correlation because all of the components are at the same temperature and expe-
rience the same drifts. One way to learn which element is most sensitive to tem-
perature drift is to individually test the thermal response of each component. A
heater in the form of a 10 W power resistor is strapped or taped to the component
of interest and a temperature sensor is placed nearby to monitor the component
temperature. Then, while the experiment is running normally, sufficient current
is run through the heater to increase the temperature of the component by several
degrees. The changes in the signal and the relevant laser beam position measure-
ments are recorded and a temperature sensitivity measurement in fT/C is calcu-
lated. The raw data from one such test involving eight different components is
found in Figure 4.8. The signal change is often obscured by noise and drift, so in
many cases one must place a limit on the temperature sensitivity in lieu of a direct
measurement. The signal shifts are actually easier to discern than this plot suggests;
considerable detail is lost on this scale.
The complete set of thermal sensitivity measurements pertaining to the pump
beam components, including the results from Figure 4.8, is found in Table 4.2.
The largest single element sensitivities are the pump table flap near the cylindri-
cal lenses, the variable waveplate, and the optical isolator. Every element has

4.2. Systematic Noise 153
−100
−50
0
50
100
150
Sig
nal
(fT
)
1990 1991 1992 1993 1994
Time (Sidereal Days)
Signal
−10
0
10
Po
siti
on
(mm
)
Pump horizontal position ×10
Pump vertical position
0
2
4
6
Tem
per
atu
re∆
T(C
)
1. Upper case of pump laser
2. Pump laser first telecope lens
3. Probe final telescope lens
4. Faraday rotator cooling water
5. Pump table flap near cylindrical lens
6. Cell tube
7. Pump table near isolator – loose forks
8. Pump isolator
Figure 4.8: Heaters spread around the experiment are sequentially turned on for a fewhours each to pinpoint areas of the experiment that are particularly sensitive to tempera-ture and are in need of refinement.

4.2. Systematic Noise 154
Element ∆T ∆S dS/dT ∆xp ∆yp(C) (fT) (fT/C) (µm) (µm)
Room Temperature—loose forks +0.7 +400 +600 −450 —Pump Table, Cyl. Lens Inside +3.0 −104 −35 +350 −110Pump First Mirror +5.7 ≤ +39 ≤ +7 +130 —Pump Translation Stage +3.9 ≤ +13 ≤ +3 −270 —Pump Isolator +2.6 < +72 < +27 +100 —
Obscured by probe mode hop.Pump fixed polarizer +5.5 +26 +5 −160 −30Pump pinhole assembly +5.3 +78 +15 +540 +23Pump variable waveplate +5.4 −150 −28 +550 +45Pump laser upper casing +1.7 < +13 < +26 — —
Measurement ∆T limited.Pump first telescope lens +10.0 +13 +1 −140 +32Pump Table, Cyl. Lens Outside +2.8 −52 −19 — −609Pump table front isolator +3.8 +60 +16 +310 +18Pump table isolator front—tight forks +3.8 +43 +11 +380 +30Pump table isolator back—tight forks +6.2 +29 +5 −20 −9Entire Table—tight forks +0.8 −57 −71 — 21Room Temperature—after improvements +0.4 +75 +189 — —
Table 4.2: A survey of the thermal sensitivity of various components involved with thepump beam.
some sensitivity. Those elements with high sensitivity have particularly large ver-
tical position shift. Although vertical alignment does not contribute to the co-
magnetometer signal according to the models, it may contribute due to various
nonuniformities. In particular, if the pump beam moves a few 100 µm vertically,
the intersection of the pump and probe beams can be significantly altered or re-
duced. To reduce this effect, the pump beam was made even more uniform by
the careful adjustment of the cylindrical lenses and was expanded so that small
changes in the pump beam position should not significantly alter or reduce the
intersection of the pump and probe beams.

4.2. Systematic Noise 155
−100
−50
0
50
100
Sig
nal
(fT
)
2007 2008 2009 2010 2011 2012
Time (Sidereal Days)
28
28.5
29
29.5
30
Tem
peratu
re(C
)
Signal
Room Temperature
Figure 4.9: After several improvements, the temperature-signal correlation is reduced to189 fT/C, a factor of 3 improvement over the data in Figure 4.7.
Several measurements at the beginning of this survey indicated that the optical
isolator had thermal sensitivity in excess of 100 fT/C. Those initial measurements
used a heater attached directly to the side of the isolator and introduced a large ther-
mal gradient through the Faraday rod in the isolator, which significantly steered
the beam vertically. In subsequent measurements of thermal sensitivity of the opti-
cal isolator, now carefully avoiding applying a thermal gradient, the strongest sen-
sitivity came from heating the table next to the isolator. A modest improvement
in thermal sensitivity (from 16 to 11 ft/C) was achieved by simply repositioning
and tightening the optical pedestal forks that clamp the pedestals to the optical
table. After this minor success, screws were tightened all over the experiment.
After expanding the pump beam and tightening the forks, a long-term data run
measured the thermal sensitivity of the entire experiment to room temperature.
The resulting thermal sensitivity derived from the data in Figure 4.9 was +189
fT/C, more than 3 times better than the initial sensitivity.

4.2. Systematic Noise 156
Figure 4.10: Thermal expansion of the table flap induced by differential heating of the tableflap causes the beam to move vertically.
Thermal expansion of the pump table flap may fully explain the thermal sensi-
tivity due to heating the pump table flap near the cylindrical lens mount. The table
flap, shown in Figure 4.10 is a two inch thick optical breadboard that spans the gap
between the two main wings of the optical table. The top surface of the table flap
is enclosed by a lexan box and the air temperature in the box is cooled by chilled
water flowing through the pump beam. The bottom surface is more exposed to the
fluctuating room temperature. The differential expansion of the top and bottom of
this flap could cause it to warp like a bimetal strip.
One can estimate the vertical deflection of the table flap for the differential heat-
ing of this table flap. In particular, the heaters placed near the cylindrical lenses
(indicated by the single lens on the flap in Figure 4.10) created a particularly large
vertical beam motion of 38 µm/C. Nonmagnetic stainless steel used in the table
is categorized as anamorphic stainless steel, for which the thermal expansion is
ζ = 1.7 × 10−5 mm/mm/C. The deflection is modeled by considering the top

4.2. Systematic Noise 157
sheet of stainless as expanding relative to a fixed bottom sheet. The differential
expansion causes a vertical deflection ∆y of the table flap, where ∆y is given by
∆y =lxTζ∆T
w(4.1)
where a spot of length xT, heated up by an amount ∆T, deflects the table flap of
thickness w relative to the anchor point a length l away. For a heater affecting a
spot 20 cm in dimension around the cylindrical lens mount, one estimates a verti-
cal deflection of−35 µm/C. A Technical Manufacturing Corporation white paper
gives a vertical deformation of ∼ 28 µm/C for uniform heating of a 12 in thick
table. Although not directly comparable, our model gives the same order of mag-
nitude. If an f = 100 mm spherical lens next to the cylindrical lens were to move
vertically by the estimated amount, then the beam would be deflected vertically
by −240 µm/C at the cell. The measured deflection while heating the cylindrical
lens mount is −218 µm/C. Thus, the thermal expansion of the table flap due to
air thermal fluctuations may significantly contribute to the signal drift.
Two measures have been implemented to decrease systematic noise due to ver-
tical movement: First, the temperature of the entire experiment inside the thermal
shield is controlled to better than 0.1C by blowing temperature-controlled air into
the box. Second, the pump beam was expanded vertically a bit to prevent vertical
beam position drift from changing the pump-probe intersection too significantly.
Thermal sensitivity measurements were also made for optical elements in the
probe beam and for various other parts of the experiment. The results in Table 4.3
indicate that the Faraday rotator rod and the probe beam collimating lens have the
highest thermal sensitivity. The Faraday rod sensitivity may be due to interference
effects between the two surfaces. As a temporary solution, the rod was tilted at

4.2. Systematic Noise 158
Element ∆T ∆S dS/dT Comments(C) (fT) (fT/C)
Probe Faraday rotator rod +1.3 +78 +58 Heated input waterProbe Pockel cell +5.1 +13 +3 Large background shift
was fully compensated;slight probe steering.
Probe table—Left (near Isolator) +1.9 ≤ +42 ≤ +22 Obscured by roomtemperature change.
Probe fixed polarizer +2.7 +26 +10Probe translating lens +6.7 +86 +13 ∆ym = −0.13 VProbe position pickoff +7.5 +22 +3Magnetic shield frame ∼ +2.0 < +15 < +7Outer magnetic shield ∼ +2.0 < +15 < +7Probe final collimating lens +2.1 −39 −18Probe table—Right +7.4 < +13 < +2 ∆xm = +0.26 VCell holder tube +12.6 < +12 < +1
Table 4.3: A survey of thermal sensitivities over the whole experiment.
an angle sufficient to eliminate interference. The final solution will include cutting
and polishing a slight angle on one end of the rod and coating both ends.
4.2.4 Systematic noise compensation
The previous sections have discussed many sources of systematic drift, some of
which were observed during long-term data runs. After efforts to suppress those
sources of systematic noise, remaining systematic noise can be accurately charac-
terized and explicitly removed from the signal. There are four identifiable types
of systematic drift that can be explicitly removed: (1) any correlation between the
signal and another, separate measurement, (2) purely linear or, more rarely, second-
order polynomial drifts, (3) sudden jumps in the signal associated with mode hops
of the lasers, and (4) temporary excursions from a nominal trend. These corrections

4.2. Systematic Noise 159
−200
0
200
Sig
nal
(fT
)
1966 1968 1970 1972 1974
Time (Sidereal Days)
Signal
Fit pump horizontal angle and linear
Uncorrelated Signal
Figure 4.11: Pump horizontal position strongly correlates with the signal. The pump po-sition fits nicely to the data and can be subtracted to give the data for the ’UncorrelatedSignal’ trace.
may be made only if they do not risk reducing sensitivity to sidereal variation. This
section contains examples of these systematic effects and some details about their
causes and solutions.
Correlated measurement removal
In general, the clearest and most common systematic effects are due to correlation
between the signal and another measurement. These sources of systematic noise in-
clude drift in the angle and position of the pump and probe beams and the temper-
ature of various highly sensitive components. Figure 4.11 shows an archetypical
signal-pump beam position correlation. In these data, the optical elements used
for the pump beam were moving with changes in temperature. The moving opti-
cal elements caused the pump beam to move both horizontally and vertically. To
determine the degree of correlation, the pump position is fit to the signal using a

4.2. Systematic Noise 160
−200
−100
0
100
200S
ign
al(f
T)
1663 1664 1665 1666 1667 1668
Time (Sidereal Days)
Signal
Probe horizontal position
Figure 4.12: Position of the probe beam (dashed line) is strongly correlated with the signal(solid line).
nonlinear least-squares method. Since the signal and the pump position are sam-
pled at different rates and times, the pump position data is fit to a spline curve and
the fit uses that spline function. The signal and position traces in Figure 4.11 show
the result of this fitting process and indicate a high degree of correlation. This fit-
ting procedure was used for various other measurements and the most correlated
measurement is chosen for subtraction from the signal. The splined pump position
is subtracted from the signal to obtain the uncorrelated signal in Figure 4.11. This
correlation inspired the survey of thermal sensitivity found in Section 4.2.3 and
was ultimately reduced by tightening the forks that hold the pump beam optical
mounts to the table and expanding the pump beam.
Figure 4.12 contains another signal correlation example. The probe beam was
moving significantly over the course of several days. During this data set, the
pump-probe nonorthogonality was not zeroed. Thus, the motion of the probe

4.2. Systematic Noise 161
−1000
0
1000
2000
Sig
nal
(fT
)
1816.5 1817 1817.5 1818
Time (Sidereal Days)
Signal with probe mode hops
Signal with jumps removed
Scaled barometric pressure
Figure 4.13: The jump removal procedure eliminates signal jumps due to probe beammode hops. The remaining signal is correlated with the barometric pressure.
beam contributed directly to the signal. This correlation was eventually suppress-
ed by zeroing the pump-probe nonorthogonality and by replacing the glue hold-
ing a mirror in the probe laser. That the glue expanded significantly with humidity
was made eminently clear when a cooling water leak formed in the probe beam
area.
Jump removal
The short section of data in Figure 4.13 demonstrates the removal of sudden laser-
mode-hop jumps. One must identify real mode hops by looking at the intensity
and wavelength of the lasers to obtain the exact times of significant mode hops.
The jump removal procedure looks at the average signal level 10 minutes before
and 10 minutes after the jump, excluding data for 5 minutes around the jump. The
procedure then adds an appropriate constant correction to all the data on the right
hand side of the jump. Sometimes the probe laser becomes multi-mode when it

4.2. Systematic Noise 162
−200
−100
0
100
200
300S
ign
al(f
T)
1694 1695 1696 1697
Time (Sidereal Days)
Signal with probe mode hops
Signal with hops removed
Scaled quadratic curve
Figure 4.14: The signal fits reasonably well with a second-order polynomial after tempo-rary excursions have been removed.
is in the process of hopping modes. During multi-mode operation, the signal can
become quite noisy. It is therefore important to exclude from the jump removal
procedure the period of time—sometimes up to an hour—during which the probe
beam is multi-mode around a mode hop. After the mode hops were removed from
the data in Figure 4.13, the data were strongly correlated with the ambient baromet-
ric pressure. For this run, the probe laser wavelength was locked to a Fabry-Perot
cavity. The changes in barometric pressure caused the index of refraction of the air
in the cavity to change and, thus, the effective path length of the cavity. Simply
switching off the wavelength feedback stopped this correlation while a vacuum
Fabry-Perot cavity was constructed (which suffered from temperature sensitivity
despite the use of Invar).

4.2. Systematic Noise 163
Slow polynomial drift removal
The data in Figure 4.14 exhibit temporary mode hops and an overall second-order
dependence. The probe mode hops indicated by the dashed line are only tem-
porary and in all cases the probe beam returns to the same dominant mode and
wavelength. Thus, it is more accurate to simply clip out the data during the mode
hop instead of removing the beginning and ending mode jumps. After the mode
excursions are removed, the signal exhibits a clear second-order polynomial depen-
dence. Removing this quadratic curve is valid because it spans several days and
does not remove significant sidereal amplitude.
4.2.5 Systematic error estimation
Systematic effects dominate the long-term co-magnetometer signal. The correla-
tion between measured parameters and the signal can provide an estimate of each
parameters’ contribution to the systematic noise observed in the experiment. For
Figure 4.15, each parameter’s time series is fit to the signal and thereby placed
in units of femtoTesla. The correlation coefficient R between each parameter and
the signal is calculated; a correlation constant of 1 would imply that the signal is
entirely due to the correlated parameter. The systematic error due to each parame-
ter is given by the sidereal amplitude of the parameter, Cx,y, times the correlation
coefficient.
These systematic contributions δAx and δAy to the sidereal amplitudes Ax and
Ay are shown in Table 4.4. Before this correlation analysis, the pump and probe
correlations were removed from the signal to the extent possible. Although the

4.2. Systematic Noise 164
0
250
500
750
1000
1250
1500
femtoTesla
1950
1952
1954
1956
1958
1960
Sid
eralD
ays
Sig
nal
Pro
be
hori
zonta
lpos.
Pro
be
ver
tica
lpos.
Pro
be
pre
-cel
lhori
zonta
lpos.
Pro
be
pre
-cel
lver
tica
lpos.
Pum
phori
zonta
lpos.
Magnet
icShie
ld1
Tem
p.
Cel
lTem
per
atu
re
Room
Tem
per
atu
re
Pro
be
Osc
illa
tor
Inte
nsi
ty
Pum
pW
avel
ength
Bx
zero
corr
ecti
on
By
zero
corr
ecti
on
Bz
zero
corr
ecti
on
Pock
elce
llL
xze
roco
rrec
tion
Dev
iato
rα
zero
corr
ecti
on
Figu
re4.
15:
Para
met
erda
taar
eno
rmal
ized
tovi
sual
ize
corr
elat
ions
wit
hth
esi
gnal
.Th
eac
tual
corr
elat
ion
anal
ysis
isfo
und
inTa
ble
4.4.

4.2. Systematic Noise 165
Parameter Cx Cy R δAx δAy(fT) (fT) (fT) (fT)
Probe horizontal pos. −209.6 −284.0 0.036 −7.56 −10.24Probe vertical pos. 8.8 44.7 0.207 1.83 9.24Probe pre-cell horizontal pos. −20.9 22.9 −0.189 3.94 −4.32Probe pre-cell vertical pos. 17.0 11.4 0.418 7.11 4.77Pump horizontal pos. 4.2 18.6 −0.470 −1.95 −8.73Magnetic Shield 1 Temp. −21.4 −41.1 −0.179 3.83 7.38Cell Temperature 1.7 −24.8 −0.216 −0.36 5.35Room Temperature 56.1 −143.0 −0.081 −4.54 11.58Probe Oscillator Intensity 108.2 −81.6 −0.060 −6.53 4.92Pump Wavelength −7.2 −18.7 −0.378 2.70 7.05Bx zero correction 20.5 −58.0 −0.264 −5.40 15.33By zero correction 73.9 33.1 −0.185 −13.67 −6.11Bz zero correction −41.3 89.5 −0.055 2.28 −4.94Pockel cell Lx zero correction 110.3 205.2 −0.071 −7.81 −14.53Deviator α zero correction −108.7 −61.9 −0.099 10.72 6.10
Table 4.4: Measured systematic errors derived from the data in Figure 4.15. The correlationconstant R between each parameter and the signal is multiplied by the sidereal amplitudeof the parameters Cx,y to obtain the contributions δAx and δAy to the systematic noise inthe anomalous field measurement. Note that the signal had been compensated for pumpand probe position correlations before this analysis.
long-term drifts due to pump and probe motion were properly removed, the decor-
relation may have introduced short-term, correlated, and systematic noise that cre-
ate the relatively large correlation coefficients. The room temperature correlation is
suppressed relative to the data in the section on thermal sensitivity (Section 4.2.3)
because the temperature couples to the pump and probe positions, which were ex-
plicitly removed. The pump wavelength is strongly correlated with the signal but
the sidereal component of the drift appears to be small. A few of the top contribu-
tions to systematic error in A may merit further study: Bx, By, the Pockel cell and
the Deviator appear to have marginally larger contributions to the systematic error.
The Pockel cell sensitivity can be understood in terms of generating lightshifts Lx

4.3. Anomalous field measurement 166
while Bx may be simply compensating for changing Lx. The deviator sensitivity
can be understood in terms of the position correlations.
These systematic errors are likely to be highly correlated and cannot be sim-
ply added up. Temperature drift, for example, contributes to the beam position
measurements and perhaps even to the Pockel cell voltage (since the Pockel cell
is sensitive to beam angle). To determine the systematic error, one can attempt
to combine the systematic errors from a few sources that are considered indepen-
dent. For example, the systematic errors due to probe beam motion and the pump
wavelength may be sufficiently independent. In this case, the total systematic error
would be δA ' 15 fT. This correlation analysis only applies to the 12 days shown in
Figure 4.15 but similar results are obtained for other long data runs. Shorter runs
of 1 or 2 days give inconsistent results and are not well suited to correlation anal-
ysis. At this level of systematic error, the experiment searching for < 1 fT fields
is completely swamped by systematic noise. Indeed, as will be shown in the next
section, it took a very long time to average away this systematic noise to achieve
sub-femtoTesla sensitivity.
4.3 Anomalous field measurement
After all possible correlations and systematic drifts have been removed, the result-
ing signal is analyzed to search for the presence of any signals due to an anomalous
field. The signal due to an anomalous field would appear as a sinusoidal variation
in the signal with a period of exactly one sidereal day. Sidereal time measures the
rotation of the earth relative to a fixed, celestial coordinate system wherein one

4.3. Anomalous field measurement 167
−100
−50
0
50
100S
ign
al(f
T)
1966 1968 1970 1972 1974
Time (Sidereal Days)
Uncorrelated Signal
Sinusoidal fit: 7.7 ± 0.7 fT, 0.42 ± 0.01 sd
Figure 4.16: Sidereal signal fit to a data run after all correlation has been removed.
sidereal day is defined as exactly one 360 rotation of the earth in this celestial
frame. The anomalous fields of interest to this experiment are considered fixed in
this celestial frame, so any signal due to the earth rotation should appear in the
lab as a signal modulated with a period of one sidereal day (the direct gyroscopic
sensitivity of the earth’s rotation generates a constant offset with no Sidereal com-
ponent). The solar day is slower than the sidereal day because in one solar day
the earth must rotate an extra 4 minutes to compensate for the fact that the earth is
moving around the sun. All the data in this thesis are referenced in sidereal days
from the standard J2000 epoch. For more details on the J2000 epoch and relevant
conversions, see Appendix A.
4.3.1 Sidereal amplitudes
There are several possible ways to obtain the sidereal amplitude from a section
of data. One method is to find the best fit sinusoid with a fixed frequency of

4.3. Anomalous field measurement 168
Ω⊕ = 1/sd. Figure 4.16 shows a sample of data with the best fit sidereal sinusoid.
Here, a nonlinear least-squares fitting algorithm is used to find the best fit ampli-
tude, phase and offset. Since the fitting routine cannot directly find the global best
fit, the real and imaginary parts of the 1/sd frequency component of fast Fourier
transform of the signal provide an accurate estimate and initial guess of the ampli-
tude and phase. The fit of
κS = A sin(Ω⊕t + φ) (4.2)
= Ax cos(Ω⊕t) + Ay sin(Ω⊕t) (4.3)
can be expressed either in polar A, φ coordinates, or in Cartesian Ax, Ay coordi-
nates. The latter case is preferable because Ax and Ay are independent. Here κ con-
verts between raw signal units and fT. This nonlinear least-squares method is good
for analyzing data with significant gaps. Error estimates for the fit parameters can
be obtained from the best fit covariance matrix. However, the fitting routine and
the error estimates are only reliable for Gaussian distributed data, which is clearly
not the case in Figure 4.16 or in the majority of the data.
A lock-in or Fourier analysis technique is a superior method for highly noise-
compromised data. The data are multiplied by sine and cosine references with
unit amplitude and periods of 1 sidereal day. The multiplied data are averaged
over an integral number of periods to provide an accurate measure of Ax and Ay
(if the appropriate factors of 2 are included). This technique is a type of Fourier
transformation that obtains the amplitude of the Fourier component with sidereal
frequency. The uncertainty can be estimated if the noise spectrum is well known.

4.3. Anomalous field measurement 169
Osc
illat
ion
Am
plitu
de (f
T)
Frequency (1/sd)
10-4
.001
.01
0.1
1
10
100
.01 1.1 10 1000 105 107100 104 106
Figure 4.17: Lomb periodogram of 6 days of continuous data recording as a function offrequency. The CPT signal is expected to appear at the frequency of 1/sd shown by the ver-tical line. Peaks at higher frequencies correspond to periodic zeroing of the magnetometerfields.
However, since the exact form of the 1/ f noise is not well known, this error estima-
tion is not used. Instead, the uncertainty in the amplitude can be reliably obtained
from the scatter of repeated amplitude measurements.
The uncertainty of the sidereal amplitude is taken to be the upper limit on the
magnitude of the anomalous field. If the amplitude is greater than the uncertainty
in the amplitude, then either anomalous fields are coupling into the experiment or
systematic drift with a large sidereal frequency component dominates the signal.
One way to differentiate between these two possibilities with only a few days of
data is to consider their frequency spectra. The frequency spectrum of typical data
is found in Figure 4.17. A Lomb Periodogram (Press et al., 1992) was used to obtain
a frequency spectrum for nonuniformly sampled signal data. On short timescales

4.3. Anomalous field measurement 170
−100
−50
0
50
100Sig
nal
(fT
)
1700 1750 1800 1850 1900 1950 2000
Time (Sidereal Days)
Figure 4.18: Data runs taken over the course of a year. Gaps in the data represent timeswhen the experiment was being upgraded or when the data had too much drift.
at around 6 Hz (a bit shy of 106 1/sd), the noise peaks due to the resonance of the
3He spins. At progressively lower frequencies from that peak, the noise first drops
off a bit, indicative of the 3He canceling magnetic noise, before the magnetome-
ter becomes dominated by drift and the noise level rises. Systematic drift has no
discernible peak at frequency Ω⊕ = 1/sd; a drift frequency spectrum generally in-
creases for decreasing frequency, which is why it is often called 1/ f noise. Anoma-
lous field coupling would, in contrast, create a clear peak at f = 1/sd. Because
diurnal and sidereal signals are so similar on the timescale of a typical several-day
run, the only way to clearly verify anomalous field coupling at f = 1/sd is to
compare the phase of any sidereal variation between two data sets several months
apart. After 6 months, diurnal variation experiences a full 180 phase lag with
respect to sidereal variation due to the earth moving around the sun.

4.3. Anomalous field measurement 171
4.3.2 Long term data analysis
From all the signal data S recorded over 15 months, one must obtain a single pair
of sidereal amplitudes Ax and Ay. Figure 4.18 shows all of the data taken over
the course of a year that meet basic minimum requirements. In this plot, the data
were filtered by eliminating data runs that were shorter than 1 sidereal day and by
limiting the noise with a conservative cutoff of Arms < 100 fT; where Arms is the
RMS (root mean square) or standard deviation of the data:
Arms = κ
√√√√ 1NS
NS
∑i=0
(Si − 〈S〉)2 (4.4)
where 〈S〉 is the mean of the data and NS is the number of samples in the data set.
Figure 4.19 shows the sidereal amplitude of each run with a cutoff of Arms < 100
fT. Although the order of the data is preserved, the actual times have been dis-
carded. The error bars for each run are defined by the RMS of the data in the run
and the length NS of the run according to σi = Arms/√
NS. In this way, longer
runs have greater weight. The RMS uncertainties are conservative estimates of the
amount of noise contributing to the sidereal amplitudes. They are, however, accu-
rate representations of the relative noise level between the runs. One can justifiably
scale all the uncertainties σi by a multiplicative factor such that the resulting fit
provides χ2 = 1, indicating that the error bars are consistent with the scatter of the
data. For reference,
χ2 ≡ 1NA − 1
NA
∑i=0
(Ai − 〈Ai〉)2
σ2i
(4.5)

4.3. Anomalous field measurement 172
−50
0
50
Ay
(fT
)
0 5 10 15 20 25 30 35 40
Run number
Ay = (0.355± 0.941) fT
−50
0
50
Ax
(fT
)
Ax = (−0.694± 0.634) fT
Figure 4.19: Summary of the sidereal amplitudes of each run. These runs were selectedby limiting the noise level of each run to Arms < 100 fT. The error bars set by Arms/
√NS
where NS is the length of the run were scaled by a common factor to be consistent with thescatter of the data.

4.3. Anomalous field measurement 173
Here NA is the number of runs and 〈A〉 is the weighted mean of the daily ampli-
tudes given by
〈A〉 =∑NA
i=0Aiσ2
i
∑NAi=0
1σ2
i
(4.6)
To properly estimate the error for the data in Figure 4.19 such that it is consistent
with the scatter of the data (making χ2 ' 1), the RMS amplitudes were uniformly
scaled by a factor of order unity. The resulting weighted average amplitudes are
indicated in the figure. These results, however, may be skewed because of gaps in
the data during the runs.
occurrence In order to eliminate gaps in the runs, one can use a more fine-
grained approach wherein the runs are split up into individual sidereal day seg-
ments that avoid any data gaps in the run. To obtain the data and results in Figure
4.20, there are several discernible steps to describe: (1) First, the data are broken
down into short, equal 1 sidereal day segments that avoid any gaps. (2) The days
are assigned error bars or weights σi according to the standard deviation or RMS,
Arms, of the signal in each day. (3) Without introducing any bias or strongly af-
fecting the results, the noisiest data can be filtered out by setting an upper limit
Arms < 100 fT on the RMS of the signal. (4) The sidereal amplitudes Aix,y of the
data in each day are obtained using the lock-in technique described in Section 4.3.1.
(5) All the days of data with their amplitudes and uncertainties are combined us-
ing a weighted average to obtain a single pair of sidereal amplitudes Ax and Ay for
the entire data set. (6) If the data set has χ2 6= 1, the error bars may be uniformly
scaled by a factor of order unity in order to provide χ2 = 1 for which the scatter
of the data is consistent with the uncertainties. For Figure 4.20, the error bars were

4.3. Anomalous field measurement 174
−100
−50
0
50
100
Ay
(fT
)
0 10 20 30 40 50 60 70 80 90 100 110
Day number
Ay = (0.591± 0.807) fT
−100
−50
0
50
100
Ax
(fT
)
Ax = (−0.760± 0.740) fT
Figure 4.20: Summary of sidereal amplitudes of each day. These days were selected bylimiting the noise level of each day to Arms < 100 fT. The error bars set by Arms were scaledby a factor of 0.7 to be consistent with the scatter of the data. The indicated results for Axand Ay are weighted averages of these data.

4.4. Anomalous coupling energy and conversions 175
set to σi = 0.7Airms. The reduction of the error bars using this method indicates that
the RMS value overestimates the uncertainty in the sidereal amplitudes.
The only arbitrary element in this analysis was the cutoff of Arms < 100 fT.
Figure 4.21 shows how the results change for a range of different cutoff values.
As the cutoff increases, more days of data are included, the uncertainty decreases
towards an asymptote and the mean values of Ax and Ay become constant. Thus,
it is clear that the cutoff Arms < 100 fT discards insignificant data. The resulting
weighted average of the data in Figure 4.20 gives
Ax = (−0.76± 0.74) fT
Ay = (+0.59± 0.81) fT (4.7)
In the next section, these amplitudes are used to obtain a limit on anomalous fields.
Figure 4.22 shows a histogram of the sidereal amplitudes of each day. One
can see significant deviation from a Gaussian distribution, an indication that one
must avoid analysis techniques such as least-squares fitting that require Gaussian-
distributed data. The analysis technique presented here does indeed avoid this
requirement.
4.4 Anomalous coupling energy and conversions
The co-magnetometer is sensitive to the difference between the 3He nuclear cou-
pling and the K electron coupling to an anomalous field (Equation 2.123):
A = κS = bn − be (4.8)

4.4. Anomalous coupling energy and conversions 176
−5
−2.5
0
2.5
5
Ay
(fT
)
0 20 40 60 80 100
Cutoff (fT)
−5
−2.5
0
2.5
5
Ax
(fT
)
Mean
Error
0
1
2
χ2
χ2x
χ2y
0
1
2
Un
cert
ain
ty(f
T)
δAx
δAy
0
50
100
150D
ays
of
Dat
a
Figure 4.21: Dependence of the mean value and uncertainty on the signal RMS cutoff.Adding days with larger RMS noise (above 40 fT) has little effect on the results. Theweights on each day were scaled by 0.7 for all parts of this analysis.

4.4. Anomalous coupling energy and conversions 177
0
0.01
0.02
0.03
0.04
Occ
urr
ence
Fre
qu
ency
-38.
0-3
4.0
-30.
0-2
6.0
-22.
0-1
8.0
-14.
0-1
0.0
-6.0
-2.0 2.0
6.0
10.0
14.0
18.0
22.0
26.0
30.0
34.0
38.0
Ay (fT)
0
0.01
0.02
0.03
0.04
0.05
Occ
urr
ence
Fre
qu
ency
-38.
0-3
4.0
-30.
0-2
6.0
-22.
0-1
8.0
-14.
0-1
0.0
-6.0
-2.0 2.0
6.0
10.0
14.0
18.0
22.0
26.0
30.0
34.0
38.0
Ax (fT)
Figure 4.22: Distribution of the sidereal amplitudes of each day of data. These data reflectthe amplitudes found in Figure 4.20.

4.4. Anomalous coupling energy and conversions 178
The couplings to K and 3He spins can be approximated to first order as couplings
to electron and neutron spins, respectively. Although the 41K nuclear spin I = 3/2
is due to a valence proton, the K coupling is dominated by the valence electron
coupling, which is a thousand times stronger for comparable be ∼ bp. 3He nuclear
spin can be approximated by a neutron spin because the 3He nucleus has two pro-
tons in a closed shell with a valence neutron. However, Friar et al. (1990) show
that in a polarized sample of 3He, 87% of the neutrons are polarized while 2.7% of
the protons are also polarized in the opposite direction. Thus, the co-magnetomter
is sensitive to the following linear combination of electron, neutron and proton
couplings:
A = κS = 0.87bn − 0.027bp − be (4.9)
A few percent of the spin coupling of 3He is due to proton spin while the great
majority can be attributed to neutron spin. In this way, the experiment can set
limits on the couplings to all three spins.
The coupling strength of the K electron and 3He nuclear spins to an anomalous
b field is typically given in units of energy. The amplitudes Ax,y of the anomalous
field in Tesla can be expressed in terms of energy using a magnetic moment:
bni = µ3HeAi/ f n µ3He = −6.707× 10−17 GeV/T f n = +0.87
bpi = µ3HeAi/ f p where µ3He = −6.707× 10−17 GeV/T , f p = −0.027
bei = µe Ai/ f e µe = −5.795× 10−14 GeV/T f e = −1 (4.10)
where the fractional contribution to the 3He spin polarization is f n from neutron
spin and f p from proton spin, µe is the magnetic moment associated with the K

4.4. Anomalous coupling energy and conversions 179
electron (a Bohr magneton) and µ3He is the magnetic moments associated with the
neutron and proton components of the 3He nuclear spin.
The experimental measurements summarized in Equation 4.7 can be expressed
in energy terms using Equation 4.10:
bnx = (+5.9± 5.7)× 10−32 GeV bn
y = (−4.6± 6.2)× 10−32 GeV
bpx = (−1.9± 1.8)× 10−30 GeV bp
y = (+1.5± 2.0)× 10−30 GeV
bex = (−4.4± 4.3)× 10−29 GeV be
y = (+3.4± 4.3)× 10−29 GeV (4.11)
Conventions and conversions for anomalous field measurements are detailed in
Appendix A. It is standard practice to express the measured anomalous field cou-
plings in terms of components along the principal axes of the celestial sphere. The-
se conversions amount to a rotation in the x-y plane to correct for the Local Sidereal
Time and a division by cos(40.3449) to account for the latitude of the laboratory:
bnX = (−3.7± 8.1)× 10−32 GeV bn
Y = (−9.0± 7.5)× 10−32 GeV
bpX = (+1.2± 2.6)× 10−30 GeV bp
Y = (+2.9± 2.4)× 10−30 GeV
beX = (+2.8± 6.1)× 10−29 GeV be
Y = (+6.8± 6.1)× 10−29 GeV (4.12)
These couplings are dominated by uncertainty, indicating that there is no anoma-
lous effect at this level of sensitivity.
A simple bound on the level of these anomalous field couplings can be obtained
from these data. The bound b is set such that a measurement of bx and by has a

4.4. Anomalous coupling energy and conversions 180
b
x
y
dbx
dby
Figure 4.23: Error analysis integral: The uncertainties in the measurements of bx and by areassumed to be Gaussian distributions. The bound b is set such that a measurement of bxand by has a 68.3% (1-σ) chance of being smaller than b.
68.3% (1-σ) chance of being smaller than b. Assuming normally distributed mea-
surements, this bound can be obtained by solving the following equation for b:
0.683 =∫ x=+b
x=−b
∫ y=+√
b2−b2x
y=−√
b2−b2x
1πδbxδby
exp(− (x− bx)2
δb2x
)exp
(−
(y− by)2
δb2y
)dy dx
(4.13)
This integral can be visualized using Figure 4.23. Using this technique, one can set
the following 68.3% confidence limits on the couplings of the CPT- and Lorentz-
violation term:
bn < 1.4× 10−31 GeV
bp < 4.4× 10−30 GeV
be < 1.0× 10−28 GeV (4.14)
Sensitivity to the nuclear spin coupling is comparable to the existing limit set
by the Harvard-Smithsonian noble gas maser (Bear et al., 2002). They quote a limit
of bnXY = (6.4± 5.4)× 10−32 GeV. The data tabulated in their paper can provide
the following measurements along the celestial axes:
3He-129Xe Maser: bnX = (−0.3± 5.6)× 10−32 GeV
bnY = (+8.8± 5.3)× 10−32 GeV (4.15)

4.4. Anomalous coupling energy and conversions 181
From these measurements, the limit derived using Equation 4.13 is
3He-129Xe Maser: bn < 1.1× 10−31 GeV (4.16)
It appears that Bear et al. (2000) assume that the 3He nucleus is entirely composed
of neutron spin. The data from Friar et al. (1990) should be used to adjust the
neutron limit and can also be used to provide a proton limit as well. The proton
limit that can be derived from the 3He-129Xe maser should be comparable to the
limit that the present experiment achieves. However, since no numbers on proton
sensitivity have been published from this experiment, the following experiment
provides the existing limit on the proton coupling.
The proton spin coupling was directly measured using a hydrogen maser by
Phillips et al. (2001). The data in their paper provides the following measurements:
H Maser: bpα = (+0.1± 9.5)× 10−32 GeV
bpβ = (−8.4± 9.6)× 10−32 GeV (4.17)
Direct comparison to the X and Y celestial axes is not possible using these data, but
the limit is given by
H Maser: bp < 1.8× 10−27 GeV (4.18)
which is in agreement with the limit provided in their paper. The present experi-
ment provides a factor of 100 times improvement over this measurement.
The coupling to the electron spin is somewhat less sensitive than the Eot-Wash
torsional pendulum (Heckel et al., 2000), with measurements of
Torsional pendulum: beX = (0.1± 2.1)× 10−29 GeV
beY = (1.7± 2.3)× 10−29 GeV (4.19)

4.4. Anomalous coupling energy and conversions 182
These measurements produce a limit of
Torsional pendulum: be < 3.0× 10−29 GeV (4.20)
In light of these previous measurements, this experiment does not establish
new limits on anomalous field couplings. Nevertheless, it provides an indepen-
dent verification using new techniques that anomalous field couplings are not ob-
served at the present sensitivity.

Chapter 5
The co-magnetometer gyroscope
THE CO-MAGNETOMETER is a very sensitive, compact gyroscope. Rotation of
the apparatus gives a co-magnetometer signal in much the same way that
anomalous fields and lightshifts do: all of these couple to the electron and nuclear
spins differently than a magnetic field and thus generate a co-magnetometer sig-
nal. In the most naıve approximation, the co-magnetometer apparatus is rotating
around spins that are stationary in an inertial frame. The lasers on the apparatus
perceive the spins rotating due to a non-inertial torque that rotates the spins with
respect to the apparatus. The information in this chapter is published in Kornack
et al. (2005).
A more accurate description of the co-magnetometer gyroscope is somewhat
more complex. The electron spins are re-pumped quickly along the rotating pump
laser while the nuclear spins lag behind. The nuclear spins lag behind the rotat-
ing compensation field and precess into the vertical axis, perpendicular to the
pump and probe beams. The vertical field generated by these vertical nuclear spins
183

184
Hot AirCell
Magnetic Shields
Floating Optical Table
Position sensors
Polarizer
Pie
zoel
ectr
ic S
tack
Imm
obile
Blo
ck
Analyzing Polarizer
Photodiode
FaradayModulator
Field Coils
Lock-inAmplifier
y z
x
Pockel Cell
Pum
p B
eam
Probe Beam
λ/4
I3HeM3He
SK
Bz
MK
Single Freq.Diode Laser
Hig
h P
ower
D
iode
Las
er
Figure 5.1: A diagram of the gyroscope experiment showing the non-contact position sen-sors and the piezo driver.
ImmobileBlock
Piezo Stack
Table rotation
z x
y
Photodiode
CellSpin polarization
PositionSensors
Probe BeamPump Beam
zx
y
Figure 5.2: A front view of the gyroscope experiment.

185
−20
0
20R
ota
tio
n(µ
rad
/se
c)
0 2.5 5 7.5 10 12.5
Time (s)
−100
−50
0
50
100 Effe
ctive
Fie
ld(fT
)
Figure 5.3: Angular velocity data from position sensors (dashed line) and co-magnetome-ter signal (solid line) are plotted with no free parameters.
causes the potassium spins to precess, which is what is ultimately being measured.
These dynamics are captured by Equation 2.132, reprinted here for reference:
Ωy = γgbeffy where γg '
(1
γn− Q(Pe)
γe
)−1
(2.132)
where beffy is the calibrated signal from the co-magnetometer. One can use this
equivalence between magnetic field and rotation to calibrate the gyroscope using
magnetic fields. Conversely, it is possible to check sensitivity to CPT-violating
terms in our experiment by rotating the table.
The optical table with the K-3He co-magnetometer cell at its center was rotated
using a piezo stack as shown in Figures 5.1 and 5.2. Six non-contact position sen-
sors measure the orientation of the table as it rotates. In Figure 5.3 the rotation
signal from the position sensors and the rotation signal from the co-magnetometer
agree to within the noise of the co-magnetometer. In this plot there is no fitting
or adjustment; the calibration for the magnetometer signals was obtained using
magnetic excitation and converted to angular units using Equation 2.132. Since

186
0
0.005
0.01
0.015
0.02
Ang
leR
ando
mW
alk
(deg
rees
/hou
r1/2)
0 200 400 600 800 1000
Frequency (hour−1)
0
5
10
15
20
25Field
(fT/H
z1/2)
Figure 5.4: Noise spectrum for the co-magnetometer gyroscope.
the gyroscope directly measures the rotation angle Ωy, the measured angular fre-
quency must be integrated to obtain the angle.
The equivalence between magnetic field and rotation allows the gyroscope to
inherit all of the measured magnetic field properties of the co-magnetometer. The
noise of the co-magnetometer, shown in Figure 5.4 is nearly flat at 1 fT/√
Hz or
1.4 × 10−5 rad/√
hour for frequencies greater than 400 1/hour. A clear 1/ f de-
pendence is visible at lower frequencies. The magnetic noise is lower than the
noise due to magnetic shields because the co-magnetometer compensates for that
magnetic field noise. The gyroscope also has the same field gradient suppression
shown in Figure 3.20.
The long term stability of the absolute orientation of a gyroscope is critical in
navigation applications. In Figure 5.5 a stationary gyroscope signal was measured
for several hours. The drifting signal had its linear drift removed and was then

187
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
An
gle
(deg
rees
)
0 1 2 3 4 5
Time (hours)
Constant drift of 0.1 deg/h
Figure 5.5: Integrated angle due to long term gyroscope signal drift.
integrated over time to produce the wandering angle measurement in this plot.
The drift is at most 0.1 deg/hour.
The gyroscope angular frequency measurement is usually integrated over time
to obtain the rotation angle for use in navigation applications. The disadvantage
to the integral is that small signal offsets linearly grow the integrated angle in
time. There is, however, one compelling advantage to the integral: the gyroscope
responds to fast transients of both Ω and magnetic field gracefully. It can be shown
that the integral of the signal accurately gives the rotation angle regardless of the
time dependence of Ω. Indeed, as long as the transverse spin excitation is small
and the linearized Bloch equations are correct, transients in Ω with any time de-
pendence integrate to give the correct angle. Furthermore, the integrated signal
after an arbitrary magnetic field transient is zero. To illustrate this behavior, in
Figure 5.6 a large magnetic field transient is applied to the gyroscope and the sig-
nal responses were measured and integrated. If this were a bare K magnetometer,

188
−20
0
20
40
60
Mag
net
icF
ield
(pT
)
0 0.1 0.2 0.3 0.4 0.5 0.6
Time (s)
−0.1
0
0.1
0.2
0.3
An
gle
(rad)
Figure 5.6: Response of the gyroscope in magnetic units (dashed line) to a short magneticfield transient (solid line) yields zero integrated angle (dash-dot line) in comparison to theangle achieved by an uncoupled K spin (dotted line).
the integral of the applied transient would be large, given here by the dotted line.
The co-magnetometer response given by the dashed lines wiggles around zero in
such a way that its integral given by the dash-dotted line is equal to zero after the
excitations decay. In this example, the sensitivity to magnetic field transients is
suppressed by more than a factor of 400.
The fundamental sensitivity of the gyroscope is given by the shot-noise of the
magnetometer, Equation 2.41, converted to angular units using Equation 2.132:
δΩy =γn
γe
√Q(Pe)Rtot
NVt(5.1)
For the present configuration, the sensitivity limit is δΩ ' 1.2× 10−8 rad/s/√
Hz.
This is significantly better than the measured value, δΩ = 5.0× 10−7 rad/s/√
Hz,
which is higher due angular noise in the probe beam setup. The fundamental
sensitivity can be significantly improved by using 21Ne, which has a nuclear spin
3/2 with a gyromagnetic ratio almost 10 times lower than that for 3He. For the

189
same conditions, 21Ne should give an immediate improvement in sensitivity by a
factor of 10. In an ideal scenario, for a 10 cc Ne detector the sensitivity limit would
be δΩ = 2.0× 10−10 rad/s/√
Hz.
This gyroscope is competitive with existing gyroscope techniques because its
active volume is comparatively compact, its sensitivity is quite good, and it comes
with the various appealing properties discussed above. Table 5.1 contains a sur-
vey of existing gyroscope techniques with as much performance data as possible
converted into units that can be used for direct comparison. This gyroscope is
categorized as being a relatively compact 10 cm device. Although the current im-
plementation is closer to 2 m on a side, the active region is just 2.5 cm diameter
and the magnetic shields and lasers can be made much more compactly. In fact,
the magnetic shielding performance improves as it gets smaller. The direct com-
petitor at this scale is the widely-used fiber-optic gyroscope. After more than two
decades of refinement, the fiber optic gyroscopes have reached their practical limits.
The present co-magnetometer gyroscope is just over an order of magnitude away
in noise from the best published fiber optic gyroscope. The use of 21Ne should be
able to surpass the performance of the fiber-optic gyroscope in the near term. The
drift of the co-magnetometer gyroscope will significantly improve as it is made
more compact. In a compact device, temperature drifts will become easier to con-
trol and the evacuation of the entire device could reduce noise due to convection
currents.
The co-magnetometer gyroscope is also competitive with larger gyroscopes us-
ing different techniques. Sagnac-based gyroscopes gain sensitivity with a larger en-
closed area. Thus, the very large ring laser gyroscopes and the atom interferometer

190
Type
Rea
lized
Proj
ecte
dD
rift
Cit
atio
nSe
nsit
ivit
ySe
nsit
ivit
yra
d/s/√
Hz
rad/
s/√
Hz
rad/
hour
Larg
eSc
ale
(∼2
m)
Rin
gLa
ser
Gyr
o(C
II)
2.2×
10−
10—
—St
edm
anet
al.(
2003
)A
tom
Inte
rfer
omet
er(Y
ale)
6.0×
10−
102.
0×
10−
101.
3×
10−
4G
usta
vson
etal
.(20
00)
Inte
rmed
iate
Scal
e(∼
50cm
)M
echa
nica
l(G
ravi
tyPr
obe
B)—
—3.
0×
10−
14Bu
chm
anet
al.(
1996
)Su
perfl
uid
3 He
(Ors
ay)
1.4×
10−
73.
0×
10−
102.
1×
10−
5A
vene
leta
l.(2
004)
Ato
mic
Inte
rfer
omet
er(H
YPE
R)
—2.
0×
10−
9—
Jent
sch
etal
.(20
04)
Ato
mic
Foun
tain
(Par
is)
—3.
0×
10−
8—
Yver
-Led
ucet
al.(
2003
)A
tom
icSp
in‘N
MR
G’(
Litt
on)
2.9×
10−
6—
9.0×
10−
4W
oodm
anet
al.(
1987
)Sm
allS
cale
(∼10
cm)
Fibe
r-op
tic
Gyr
o(H
oney
wel
l)2.
3×
10−
8—
1.7×
10−
6Sa
nder
set
al.(
2002
)A
tom
icSp
in(P
rinc
eton
)5.
0×
10−
72.
0×
10−
107.
0×
10−
4
Min
iatu
reSc
ale
(<1
cm)
MEM
S(C
MU
)3.
5×
10−
41.
8×
10−
40.
5X
iean
dFe
dder
(200
3)
Tabl
e5.
1:A
surv
eyof
gyro
scop
epe
rfor
man
ce.

191
gyroscopes currently have the best reported sensitivity. Both of these are not suffi-
ciently compact for practical applications. The co-magnetometer gyroscope is com-
petitive with devices in the intermediate ∼ 50 cm scale; the projected sensitivities
of these gyroscopes are all comparable or worse than the smaller co-magnetometer
gyroscope. The exception is the mechanical gyroscopes on board Gravity Probe B
that feature very low drift operating in low gravity but are significantly degraded
in the gravitational field on the surface of the earth. The even smaller MEMS gy-
roscope holds promise in future development, although the current designs are so
sensitive to temperature drift that they are useless for long term navigation.

Chapter 6
Conclusions
THE K-3HE CO-MAGNETOMETER forms an ideal detector for anomalous fields
because it has high short-term sensitivity and is insensitive to magnetic field
drift. Based on data over a 15 month period, the co-magnetometer coupling to an
anomalous field is quoted as follows:
This experiment (Previous measurements)
bn < 1.4× 10−31 GeV (bn < 1.1× 10−31 GeV, 3He-129Xe maser)
bp < 4.4× 10−30 GeV (bp < 1.8× 10−27 GeV, H maser)
be < 1.0× 10−28 GeV (be < 3.0× 10−29 GeV, torsional pendulum) (6.1)
These measurements indicate that there is no anomalous effect at this level of sen-
sitivity. Sensitivity to the nuclear spin coupling is comparable to the existing limit
set by Harvard-Smithsonian noble gas maser (Bear et al., 2002). The proton cou-
pling is a factor of 100 better than the existing published limit set by the Harvard-
Smithsonian hydrogen maser (Phillips et al., 2001). The coupling to the electron
spin is an factor of 3 less sensitive than the Eot-Wash torsional pendulum (Heckel
192

193
et al., 2000). This measurement represents an important verification of existing re-
sults using a new method. These results should be considered preliminary due to
the relatively low sample size and the high systematic noise found in the majority
of the data.
Significant improvements in the sensitivity of the co-magnetometer can be ach-
ieved by reducing systematic noise. Although the co-magnetometer can achieve
1 fT sensitivity (equivalent to the existing limit on neutron coupling strength) in
1 second, the poor long-term stability of the experiment significantly reduces the
sidereal sensitivity. Study of systematic noise and long-term drift represents the
bulk of the labor associated with this dissertation. Increased thermal and mechani-
cal stability of all aspects of the experiment directly improves the co-magnetometer
sensitivity. Work will continue on the stability of the experiment and procedural
changes can address systematic noise introduced by zeroing routines. A second
generation of this experiment should be designed from the ground up to eliminate
temperature sensitivity and mechanical instability. This can be most effectively
achieved by making the entire experiment as compact as possible and placing it
inside a well insulated, temperature-controlled, and evacuated enclosure.
In the pursuit of a test of CPT and Lorentz violation, four major results have
been obtained: (1) A new SERF magnetometer with unprecedented, < 1 fT/√
Hz
sensitivity has been developed. This technology has many applications wherever
SQUIDs are currently used and has the advantage of obviating the use of cryogens.
The localization of brain activity is an excellent application of SERF magnetome-
ters because it utilizes both the high sensitivity and high spatial resolution. (2) A
co-magnetometer that is insensitive to magnetic field drift has been developed for

194
this anomalous field measurement. The same co-magnetometer can be used to de-
tect any non-magnetic effect that couples to spin such as spin-mass and spin-spin
couplings. (3) Strongly coupled dynamics of electron and nuclear spin ensembles
has been observed for the first time. (4) A compact, high-sensitivity gyroscope has
been developed that is competitive with similarly compact gyroscopes based on
different techniques.

Appendix A
Time and orientation conventions
Following the convention set by Kostelecky and Lane (1999), the magnitude of
the anomalous field coupling is quoted in terms of a fixed coordinate system with
Z along the rotation axis of the earth. The X and Y axes are defined according
to celestial coordinates: X has both zero declination and zero right ascension, as
shown in Figure A.1. Thus, X points along the intersection of the ecliptic (solar
orbit) and equatorial planes. Greenwich Sidereal Time, GST time, the unit of time
used in all of the data here, is based on the movement of Greenwich, England
relative to the celestial sphere. At midnight GST, the position of Greenwich is
aligned with X. Since Princeton, NJ is at longitude θ = −74.6520, the apparent
Local Sidereal Time (LST) has an offset from GST of 1 sd × −74.6520/360 =
−0.207 sd. LST is defined such that at every time LST hits 0 hours (an exact integer
number of sidereal days), X is directly overhead.
195

196
Z Z
YX X
Wt Wt
Wc
c
nUp
nEast
nSouth
Right ascension
Celestial North Pole
Celestial Equator
Celestial FrameLab Frame
Vernal Equinox
Ecliptic
Earth
Declination
Figure A.1: Left: Celestial and lab axes standardized by Kostelecky and Lane (1999). Theaxes have been drawn with a common origin for clarity. Right: Standard definitions ofright ascension and declination
A series of coordinate system transformations are necessary to convert between
the celestial coordinates and the lab coordinates. Kostelecky and Lane (1999) pro-
vides the following standard transformation between celestial coordinates and lo-
cal directions:nSouth
nEast
nUp
=
cos χ cos Ωt cos χ sin Ωt − sin χ
− sin Ωt cos Ωt 0
sin χ cos Ωt sin χ sin Ωt cos χ
X
Y
Z
(A.1)
where χ is the complement of the declination; in Princeton, NJ the latitude is
φ = 40.3449, giving χ = 90 − φ = 49.6551. The experiment z axis is oriented
southeast at an angle ψ = 30 from south. That transformation is expressed byz
x
y
=
cos ψ sin ψ 0
− sin ψ cos ψ 0
0 0 1
nSouth
nEast
nUp
(A.2)
Since the experiment is only sensitive to anomalous fields along y, this transforma-
tion is trivial.

197
It is convenient to express the sidereal variation in terms of independent in-
phase and out-of-phase components by making the substitution cos Ωt → ALx and
sin Ωt → ALy , where the superscript L corresponds to LST. The amplitude AL
x corre-
sponds to a sinusoid with its maximum at midnight LST; the orthogonal sinusoid
reaches the maximum of ALy a time 0.25 sd later. To convert between the measured
Ax pegged to GST and the useful ALx in LST, one can use the following transforma-
tion: ALx
ALy
=
cos θ − sin θ
sin θ cos θ
Ax
Ay
(A.3)
where, again, θ is longitude. In retrospect, it would have been better to use LST as
the standard time in this experiment. With all of these transformation, it is possible
to obtain an expression for the anomalous field b projections along the celestial axes
in terms of the measured GST Ax and Ay amplitudes:
bX = +Axcos θ
sin χ− Ay
sin θ
sin χ(A.4)
bY = +Aycos θ
sin χ+ Ax
sin θ
sin χ(A.5)
This experiment does not have any sensitivity to the constant bZ term since it is
constant in the experiment’s frame.
It is an accepted standard to plot data against the Greenwich Mean Sidereal
Time (GST) in units of sidereal days (sd) since J2000. Meeus (1998) provides accu-
rate algorithms for calculating the present GST. To obtain sidereal time, one must
first calculate the number of solar days since the beginning of the J2000 epoch:
TdJ2000 =367× year− floor[7(year + floor[(mon + 9]/12)/4] + floor[275×mon/9]
+ day + (hour + mins/60 + secs/3600)/24− 730531.5 (A.6)

198
where the time to use here is Universal Time (UT) and the units of the result are
in solar days (d). This is, unfortunately, cumbersome to calculate on the computer.
The computer conveniently provides a standard UNIX epoch time defined as the
number of seconds since the time 00:00:00 UT on January 1, 1970. One can carefully
convert Equation A.6 into the UNIX epoch as follows:
TdJ2000 =
tUNIX + 3, 029, 572, 800 s86400 s/d
(A.7)
With a solid expression for the number of (fractional) solar days since J2000, one
can use Meeus (1998) to find the GST sidereal time:
TsdJ2000 =
280.46061837 + (360.98564736629/d)× TdJ2000
360/sd(A.8)
Note that the following ratio accurately relates the length of the solar day to the
length of a sidereal day:
1 d1 sd
=360.98564736629/d
360/d(A.9)
Whenever minutes and seconds are indicated in this text, they always refer to the
usual divisions of the solar day; use of sidereal time is always explicitly labeled.

Bibliography
Alexandrov, E. B., Balabas, M. V., Pasgalev, A. S., Vershovskii, A. K., and Yakobson,
N. N. (1996). Double-resonance atomic magnetometers: From gas discharge to
laser pumping. Laser Physics, 6(2):244–251. 17
Allard, N. and Kielkopf, J. (1982). The effect of neutral nonresonant collisions on
atomic spectral lines. Reviews of Modern Physics, 54(4):1103. URL. 24
Allred, J. C., Lyman, R. N., Kornack, T. W., and Romalis, M. V. (2002). High-
sensitivity atomic magnetometer unaffected by spin-exchange relaxation. Physi-
cal Review Letters, 89(13):130801. URL. 32, 33, 34, 92
Anderson, L. W., Pipkin, F. M., and James C. Baird, J. (1959). N14-N15 hyperfine
anomaly. Physical Review, 116(1):87–98. URL. 31
Appelt, S., Baranga, A. B.-A., Erickson, C. J., Romalis, M. V., Young, A. R., and
Happer, W. (1998). Theory of spin-exchange optical pumping of 3He and 129Xe.
Physical Review A, 58(2):1412–1439. URL. 46
Avenel, O., Mukharsky, Y., and Varoquaux, E. (2004). Superfluid gyrometers. Jour-
nal of Low Temperature Physics, 135(5-6):745–772. URL. 190
199

BIBLIOGRAPHY 200
Baranga, A. B.-A., Appelt, S., Romalis, M. V., Erickson, C. J., Young, A. R., Cates,
G. D., and Happer, W. (1998). Polarization of 3He by spin exchange with optically
pumped Rb and K vapors. Physical Review Letters, 80(13):2801–2804. URL. 34, 57
Bear, D., Stoner, R. E., Walsworth, R. L., Kostelecky, V. A., and Lane, C. D. (2000).
Limit on Lorentz and CPT violation of the neutron using a two-species noble-gas
maser. Physical Review Letters, 85(24):5038–5041. URL. 181
Bear, D., Stoner, R. E., Walsworth, R. L., Kostelecky, V. A., and Lane, C. D. (2002).
Erratum: Limit on Lorentz and CPT violation of the neutron using a two-species
noble-gas maser. Physical Review Letters, 89(20):209902. URL. iii, 15, 16, 180, 192
Berglund, C. J., Hunter, L. R., D. Krause, J., Prigge, E. O., Ronfeldt, M. S., and
Lamoreaux, S. K. (1995). New limits on local Lorentz invariance from Hg and Cs
magnetometers. Physical Review Letters, 75(10):1879–1882. URL. 15
Bluhm, R., Kostelecky, V. A., and Russell, N. (1998). CPT and Lorentz tests in
Penning traps. Physical Review D, 57(7):3932–3943. URL. 15
Bolokhov, P. A., Nibbelink, S. G., and Pospelov, M. (2005). Lorentz violating super-
symmetric quantum electrodynamics. arXiv: hep-ph/0505029. 3, 12
Buchman, S., Everitt, F., Parkinson, B., Turneaure, J., Keiser, M., Taber, M., Bardas,
D., Lockhart, J., Muhlfelder, B., Mester, J., Xiao, Y., Gutt, G., Gill, D., Brumley, R.,
and DiDonna, B. (1996). Experimental techniques for gyroscope performance
enhancement for the Gravity Probe B relativity mission. Classical and Quantum
Gravity, 13(11A):A185–A191. URL. 190

BIBLIOGRAPHY 201
Budker, D., Kimball, D. F., Rochester, S. M., Yashchuk, V. V., and Zolotorev, M.
(2000). Sensitive magnetometry based on nonlinear magneto-optical rotation.
Physical Review A, 62(4):043403. URL. 17
Cates, G. D., Schaefer, S. R., and Happer, W. (1988). Relaxation of spins due to field
inhomogeneities in gaseous samples at low magnetic fields and low pressures.
Physical Review A, 37(8):2877–2885. URL. 55
Colladay, D. and Kostelecky, V. A. (1998). Lorentz-violating extension of the stan-
dard model. Physical Review D, 58(11):116002. URL. 10
Colladay, D. C. (1998). CPT- and Lorentz-Violating Extension of the Standard Model.
PhD thesis, Indiana University. 5, 9
Corney, A. (1977). Atomic and Laser Spectroscopy. Oxford: Clarendon Press, New
York. URL. 23
Ellis, J., Mavromatos, N. E., and Nanopoulos, D. V. (2001). How large are dissipa-
tive effects in noncritical Liouville string theory? Physical Review D, 63(2):024024.
URL. 2
Erickson, C. J. (2000). Measurements of the magnetic field dependence of the spin relax-
ation rate in alkali metal vapors. PhD thesis, Princeton University. URL. 40
Franz, F. A. and Volk, C. (1982). Electronic spin relaxation of the 42S1/2 state of K
induced by K-He and K-Ne collisions. Physical Review A, 26(1):85–92. URL. 35

BIBLIOGRAPHY 202
Friar, J. L., Gibson, B. F., Payne, G. L., Bernstein, A. M., and Chupp, T. E. (1990).
Neutron polarization in polarized 3He targets. Physical Review C, 42(6):2310–2314.
URL. 178, 181
Gabrielse, G., Khabbaz, A., Hall, D. S., Heimann, C., Kalinowsky, H., and Jhe, W.
(1999). Precision mass spectroscopy of the antiproton and proton using simulta-
neously trapped particles. Physical Review Letters, 82(16):3198–3201. URL. 15
Gambini, R. and Pullin, J. (1999). Nonstandard optics from quantum space-time.
Physical Review D, 59(12):124021. URL. 2
Gardner, W. A. (1977). Introduction to random processes with applications to signals and
systems. Macmillan, New York. 39
Green, M. B., Schwarz, J. H., and Witten, E. (1987). Superstring Theory. Cambridge
University Press. 2
Greenberg, Y. S. (1998). The effect of neutral nonresonant collisions on atomic
spectral lines. Reviews of Modern Physics, 70(1):175–222. URL. 17
Gustavson, T. L., Landragin, A., and Kasevich, M. A. (2000). Rotation sensing
with a dual atom-interferometer Sagnac gyroscope. Classical and Quantum Grav-
ity, 17(12):2385–2398. URL. 190
Happer, W. (1972). Optical pumping. Reviews of Modern Physics, 44(2):169–250. URL.
22
Happer, W. and Mathur, B. S. (1967). Effective operator formalism in optical pump-
ing. Physical Review, 163(1):12–25. URL. 46

BIBLIOGRAPHY 203
Happer, W. and Tang, H. (1973). Spin-exchange shift and narrowing of mag-
netic resonance lines in optically pumped alkali vapors. Physical Review Letters,
31(5):273–276. URL. 30
Heckel, B. R., Adelberger, E. G., Gundlach, J. H., Harris, M. G., and Swanson, H. E.
(2000). Torsion balance test of spin-coupled forces. In Kursunoglu, M. and Perl-
mutter, editors, Orbis Scientiae 1999, Quantum Gravity, Generalized Theory of Gravi-
tation, and Superstring Theory-Based Unification. IEEE, Kluwer Academic/Plenum
Publishers. URL. iii, 15, 181, 192
Jackson, J. D. (1998). Classical Electrodynamics. Wiley, 3rd edition. 41
Jentsch, C., Muller, T., Rasel, E. M., and Ertmer, W. (2004). HYPER: A satellite
mission in fundamental physics based on high precision atom interferometry.
General Relativity and Gravitation, 36(10):2197–2221. URL. 190
Jones, R. C. (1941). New calculus for the treatment of optical systems. Journal of the
Optical Society of America, 31:488–493. 123
Kaku, M. (1993). Quantum field theory: a modern introduction. Oxford University
Press. 5, 8, 10
Killian, T. J. (1926). Thermionic phenomena caused by vapors of Rubidium and
Potassium. Physical Review, 26(5):578–587. URL. 24
Kominis, I. K., Kornack, T. W., Allred, J. C., and Romalis, M. V. (2003). A subfem-
totesla multichannel atomic magnetometer. Nature, 422:596–599. URL. 92

BIBLIOGRAPHY 204
Kornack, T. W., Ghosh, R. K., and Romalis, M. V. (2005). Nuclear spin gyroscope
based on an atomic co-magnetometer. Physical Review Letters, Accepted for pub-
lication. arXiv: physics/0505089. 183
Kornack, T. W. and Romalis, M. V. (2002). Dynamics of two overlapping spin en-
sembles interacting by spin exchange. Physical Review Letters, 89(25):253002. URL.
60
Kostelecky, V. A. (1999). Bounds on CPT and Lorentz violation from experiments
with Kaons. arXiv: hep-ph/9912456. 15
Kostelecky, V. A. and Lane, C. D. (1999). Constraints on Lorentz violation from
clock-comparison experiments. Physical Review D, 60(11):116010. URL. 195, 196
Kostelecky, V. A. and Samuel, S. (1989). Spontaneous breaking of lorentz symmetry
in string theory. Physical Review D, 39(2):683–685. URL. 2
Meeus, J. (1998). Astronomical Algorithms. Willmann-Bell, Richmond, Virginia, USA,
2nd edition. URL. 197, 198
Mort, J., Luty, F., and Brown, F. C. (1965). Faraday rotation and spin-orbit splitting
of the f center in alkali halides. Physical Review, 137(2A):A566–A573. URL. 40
Myers, R. C. and Pospelov, M. (2004). Experimental challenges for quantum gravity.
arXiv: gr-qc/0402028. 11
Newbury, N. R., Barton, A. S., Cates, G. D., Happer, W., and Middleton, H. (1993).
Gaseous 3He-3He magnetic dipolar spin relaxation. Physical Review A, 48(6):4411–
4420. URL. 56

BIBLIOGRAPHY 205
Nibbelink, S. G. and Pospelov, M. (2005). Lorentz violation in supersymmetric field
theories. Physical Review Letters, 94:081601. URL, arXiv: hep-ph/0404271. 11
Phillips, D. F., Humphrey, M. A., Mattison, E. M., Stoner, R. E., Vessot, R. F. C., and
Walsworth, R. L. (2001). Limit on Lorentz and CPT violation of the proton using
a hydrogen maser. Physical Review D, 63(11):111101. URL. iii, 15, 181, 192
Pospelov, M. and Romalis, M. (2004). Lorentz invariance on trial. Physics Today,
57(7):40. URL. 13
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flannery, B. P. (1992). Numerical
Recipes in C: The Art of Scientific Computing. Cambridge University Press, New
York, NY, USA, 2nd edition. URL. 169
Ressler, N. W., Sands, R. H., and Stark, T. E. (1969). Measurement of spin-exchange
cross sections for Cs133, Rb87, Rb85, K39, and Na23. Physical Review, 184(1):102–118.
URL. 94
Rovelli, C. (1997). Loop quantum gravity. arXiv: gr-qc/9710008. 2
Sanders, S., Strandjord, L., and Mead, D. (2002). Fiber optic gyro technology
trends—a Honeywell perspective. In The 15th Optical Fiber Sensors Conference
Technical Digest, volume 1. IEEE, IEEE. URL. 190
Savukov, I. M. and Romalis, M. V. (2005). Effects of spin-exchange collisions in
a high-density alkali-metal vapor in low magnetic fields. Physical Review A,
71(2):023405. URL. 31

BIBLIOGRAPHY 206
Savukov, I. M., Seltzer, S. J., Romalis, M. V., and Sauer, K. L. (2005). Tunable atomic
magnetometer for detection of radio-frequency magnetic fields. Physical Review
Letters, 95:063004. URL. 38
Schearer, L. D. and Walters, G. K. (1965). Nuclear spin-lattice relaxation in the
presence of magnetic-field gradients. Physical Review, 139(5A):S136–S142. URL.
55
Stedman, G. E., Schreiber, K. U., and Bilger, H. R. (2003). On the detectability of the
Lense-Thirring field from rotating laboratory masses using ring laser gyroscope
interferometers. Classical and Quantum Gravity, 20(13):2527–2540. URL. 190
Sudarsky, D., Urrutia, L., and Vucetich, H. (2002). Observational bounds on quan-
tum gravity signals using existing data. Physical Review Letters, 89:231301. URL.
2
Tovar, A. A. and Casperson, L. W. (1995). Generalized beam matrices: Gaussian
beam propagation in misaligned complex optical systems. Journal of the Optical
Society of America A, 12(7):1522. URL. 89
Vucetich, H. (2005). Testing Lorentz invariance violation in quantum gravity theo-
ries. arXiv: gr-qc/0502093. 3, 12
Walker, T. G. and Happer, W. (1997). Spin-exchange optical pumping of noble-gas
nuclei. Reviews of Modern Physics, 69(2):629–642. URL. 21, 30, 54
Woodman, K. F., Franks, P. W., and Richards, M. D. (1987). The nuclear magnetic
resonance gyroscope — A review. Journal of Navigation, 40:366–384. 190

BIBLIOGRAPHY 207
Xie, H. and Fedder, G. K. (2003). A DRIE CMOS-MEMS gyroscope. In Sensors,
volume 2, pages 1413–1418. IEEE, IEEE. URL. 190
Yver-Leduc, F., Cheinet, P., Fils, J., Clairon, A., Dimarcq, N., Holleville, D., Bouyer,
P., and Landragin, A. (2003). Reaching the quantum noise limit in a high-
sensitivity cold-atom inertial sensor. Journal of Optics B: Quantum and Semiclas-
sical Optics, 5(2):S136–S142. URL. 190