
Bicycle Gas Engine conversion kit instructions - Motorize your bicycle

8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 1/10
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 56, NO. 1, JANUARY 2009 159
A Study on Straight-Line Tracking andPosture Control in Electric Bicycle
Yasuhito Tanaka and Toshiyuki Murakami, Member, IEEE
Abstract—The development of automatic control for driving abicycle is a challenging theme and is expected to be a human assistsystem. Previously, an acceleration-based method for stabilizingbicycle posture was proposed by the authors. In the experimentswith this controller, the posture of the bicycle might be stabilized,but it is impossible to run on the desired trajectory, because thereis no consideration with respect to a trajectory control. For thesake of expanding this system into more sophisticated equipment,a realization of the trajectory control for the bicycle is important.From the viewpoint of an assist system for human motion, a unifiedcontrol of posture and trajectory brings a sophisticated functionto a bicycle, and a high-performance bicycle is expected to be a
convenient vehicle, similar to a small car. This paper proposes twostrategies to stabilize bicycle posture and trajectory control thatrealizes a straight-line tracking: one is a lateral velocity controller,and the other is a steering function controller. The validity of theproposed approaches is evaluated by simulations and experiments.
Index Terms—Bicycle, inverted pendulum, line trackingcontrol, posture control.
I. INTRODUCTION
IN THE RECENT age of advanced information society, it is
common for one to own a mobile terminal for private use.
New technologies are developed one after another under the
growth of digital society. Digitalization also makes progressin bicycles. For example, a new bicycle headlight that detects
surrounding brightness and automatically turns on a light is
already in use. Electric bicycles that assist humans with the
pedal are also in practical use. In the near future, navigation
systems or Global Positioning System equipment may be ap-
plied to bicycles. However, bicycles have the defect of not being
able to stabilize their postures without human manipulation. In
any case, bicycles enhance human’s mobility and assist human
transportation; thus, although they are not capable of stabilizing
their postures, the production of a wide variety of sophisticated
bicycles that support, for instance, posture stabilization, pedal
driving, and navigation can be considered feasible.
The goal of this paper is to establish highly sophisticated
bicycle systems that support human motion in several aspects
and are expected to be safe vehicles, similar to small cars [20].
In this paper, as the first step, an electric bicycle system that
Manuscript received March 28, 2005; revised June 5, 2008. First publishedJuly 9, 2008; current version published December 30, 2008.
The authors are with the Department of System Design Engineering,Keio University, Yokohama 223-8522, Japan (e-mail: [email protected];[email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2008.927406
stabilizes its posture and follows the desired straight line is
studied.
A strict dynamic model of a bicycle called the Sharp model
was proposed by Sharp [2], and many research works based on
this model have been reported. The Sharp model is powerful but
complicated and includes many nonlinear terms. To improve
this issue, a linearized dynamic model of a bicycle is necessary
[3], [4], [14], [15]. In the proposed approach, an acceleration
control based on a disturbance observer is employed for the
steering control [12], [16]–[19]. Moreover, an acceleration-
control-based posture control is constructed for stabilizationcontrol of the bicycle. Here, the proposed approach does not
consider any change in the person’s center of gravity (COG).
However, experiments have already been implemented when
the person is boarding the bicycle, and it is proven that the
proposed posture control is experimentally effective although
some COG change is present [11]. In this paper, the posture
controller is expanded by adding a trajectory controller as a
forward controller. In the proposed approach, first, a lateral
velocity controller is discussed. In this method, the lateral
deviation of the bicycle is utilized to generate the command of
the camber angle. The controller structure is simple and brings
easy implementation. Second, a steering function controller is
proposed. In this method, the controller is constructed basedon the trajectory parameters, i.e., the direction angle of the
bicycle and the curvature of the bicycle trajectory. Then,
the physical meaning of each feedback gain becomes clear.
The steering function controller has a similar structure as a
proportional–integral–derivative (PID) controller, and the gain
adjustment is easy because of the clear physical meaning of
the feedback gains. This is one of the remarkable points of the
proposed controller.
In this paper, a simplified dynamics model of a bicycle is
introduced in Section II. Section III shows the control algo-
rithms that stabilize bicycle posture and realize straight-line
tracking. The validity of the proposed strategies is proven by thesimulation in Section IV. The experimental results are shown in
Section V. Finally, the conclusion is summarized in Section VI.
II. MODELING
A. Equilibrium of Bicycle Posture
In the case of driving a bicycle with constant steering angle
and constant speed, the bicycle runs on a circular orbit. It
is known that the intensity of centrifugal force applied to a
running bicycle is determined by the radius of the circular orbit
and the bicycle velocity. Fig. 1 shows an overview of the bicycle
0278-0046/$25.00 © 2008 IEEE
8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 2/10
160 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 56, NO. 1, JANUARY 2009
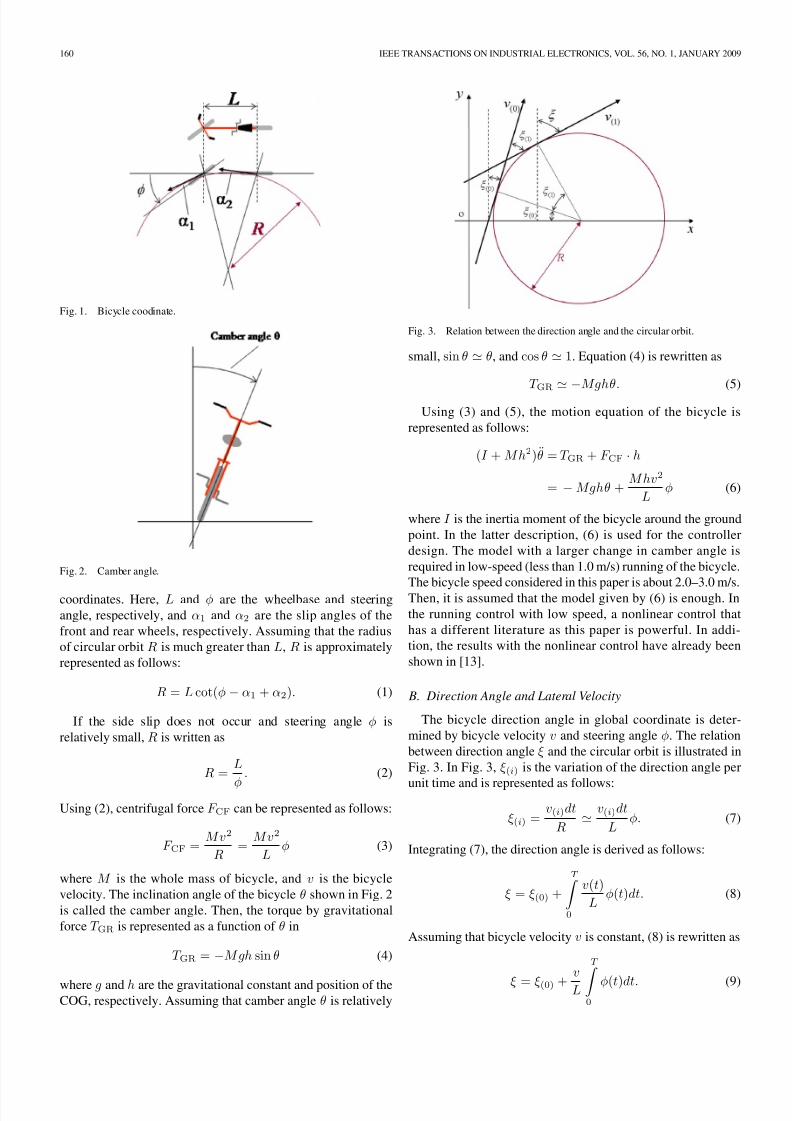
Fig. 1. Bicycle coodinate.
Fig. 2. Camber angle.
coordinates. Here, L and φ are the wheelbase and steering
angle, respectively, and α1 and α2 are the slip angles of the
front and rear wheels, respectively. Assuming that the radius
of circular orbit R is much greater than L, R is approximately
represented as follows:
R = L cot(φ − α1 + α2). (1)
If the side slip does not occur and steering angle φ is
relatively small, R is written as
R =L
φ
. (2)
Using (2), centrifugal force F CF can be represented as follows:
F CF =Mv2
R=
Mv2
Lφ (3)
where M is the whole mass of bicycle, and v is the bicycle
velocity. The inclination angle of the bicycle θ shown in Fig. 2
is called the camber angle. Then, the torque by gravitational
force T GR is represented as a function of θ in
T GR = −M gh sin θ (4)
where g and h are the gravitational constant and position of theCOG, respectively. Assuming that camber angle θ is relatively
Fig. 3. Relation between the direction angle and the circular orbit.
small, sin θ θ, and cos θ 1. Equation (4) is rewritten as
T GR −Mghθ. (5)
Using (3) and (5), the motion equation of the bicycle is
represented as follows:
(I + M h2)θ = T GR + F CF · h
= − Mghθ +M hv2
Lφ (6)
where I is the inertia moment of the bicycle around the ground
point. In the latter description, (6) is used for the controller
design. The model with a larger change in camber angle is
required in low-speed (less than 1.0 m/s) running of the bicycle.
The bicycle speed considered in this paper is about 2.0–3.0 m/s.
Then, it is assumed that the model given by (6) is enough. In
the running control with low speed, a nonlinear control that
has a different literature as this paper is powerful. In addi-
tion, the results with the nonlinear control have already been
shown in [13].
B. Direction Angle and Lateral Velocity
The bicycle direction angle in global coordinate is deter-
mined by bicycle velocity v and steering angle φ. The relation
between direction angle ξ and the circular orbit is illustrated in
Fig. 3. In Fig. 3, ξ(i) is the variation of the direction angle per
unit time and is represented as follows:
ξ(i) =v(i)dt
R
v(i)dt
Lφ. (7)
Integrating (7), the direction angle is derived as follows:
ξ = ξ(0) +
T
0
v(t)
Lφ(t)dt. (8)
Assuming that bicycle velocity v is constant, (8) is rewritten as
ξ = ξ(0) +v
L
T
0
φ(t)dt. (9)

8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 3/10
TANAKA AND MURAKAMI: STUDY ON STRAIGHT-LINE TRACKING AND POSTURE CONTROL IN ELECTRIC BICYCLE 161
Fig. 4. Velocity vector.
The position vector of the lateral direction is set as x, and that
of the longitudinal direction is set as y. The velocity vectors
of the lateral and longitudinal directions are set as x and y,
respectively, as shown in Fig. 4. Here, x can be represented by
direction angle ξ and bicycle velocity v, i.e.,
x = v sin ξ. (10)
Assuming that the direction angle of world coordinate ξ is
relatively small, (10) is rewritten as follows:
x vξ. (11)
III. CONTROL STRATEGIES
In this section, the proposed strategy for motion control of
the bicycle is described. First, the posture controller of the
bicycle is shown. Second, two strategies for trajectory control
are proposed.
A. Posture Controller
From (6), it is found that camber angle θ depends on steeringangle φ, which may stabilize the bicycle posture by steering
its handle. Considering the desired camber angle θd that deter-
mines the desired steering angle φd given by
φd = K 1(θd − θ) − K 2θ (12)
where K 1, K 2, and θd are the position gain, velocity gain,
and command of the camber angle, respectively, the transfer
function from θd to θ is represented as
θ
θd=
BK 1s2 + BK 2s + A + BK 1
,
A = M ghI + M h2
; B = M hv2
L(I + M h2). (13)
Equation (13) is rewritten as
G(s) =ω2n − A
s2 + 2ζωns + ω2n
. (14)
From (13) and (14), K 1 and K 2 can be selected according to
the desired pole assignment as K 1 = (ω2n − A)/B and K 2 =
(2ζωn)/B, respectively. From the time differentiation of φd,
φd and φd can also be calculated as follows:
φd = ddt
φd φd = d2dt2
φd. (15)
Fig. 5. Block diagram of the posture control method.
To avoid high-frequency noise, a low-pass filter is applied to
the calculation of (15). Then, the cut of frequency is selected
to be large enough to ignore the time delay, compared to the
dynamic response of the bicycle. Using these commands and
steering responses, the reference of steering acceleration φref is
determined as follows:
φref = φd + K v(φd − φ) + K p(φd − φ) (16)
where K p and K v are the position and the velocity gains,
respectively. Assuming the ideal acceleration controller based
on the disturbance observer, i.e., φ = φref , the transfer function
from φd to φ is given by
φ
φd
=s2 + K vs + K ps2 + K vs + K p
= 1 (17)
and the perfect tracking with respect to φ is achieved. From
(13), (14), and (17), the desired gains K p and K v are selected.
It is known that the position error due to the disturbanceoccurs in motion response with only the proportional–derivative
(PD) controller. To diminish the disturbance, the disturbance
observer is applied to the steering motor. The PD controller
with the disturbance observer makes it possible to realize the
ideal acceleration controller [12], [16]–[19]. From the preced-
ing discussion, the block diagram of the posture controller is
summarized in Fig. 5. Here, I h is the inertia of the steering
axis. From Fig. 5, the transfer function of the posture controller
is represented as follows:
θ
θd=
(s2 + K vs + K p)(BK 1)
(s2 + K vs + K p)(s2 + BK 2s + A + BK 1). (18)
B. Lateral Velocity Controller
As described before, the proposed posture controller stabi-
lizes the bicycle posture without consideration of the bicycle
trajectory, so the bicycle path may not be controlled. This
causes oscillating or unstable trajectory. To achieve a stable
trajectory response of the bicycle, the command of the camber
angle θd is generated according to the trajectory response of the
bicycle.
The command value of the velocity vector of lateral direction
xref is defined as follows:
xref = K x(xcmd − x). (19)

8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 4/10
162 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 56, NO. 1, JANUARY 2009
Here, K x is the proportional gain, and xcmd is the position
command of the target trajectory. By using (11) and (19), the
command of the direction angle ξcmd is determined as follows:
xref = vξcmd
ξcmd =
xref
v =
K x(xcmd − x)
v . (20)
In the case that the centrifugal force equilibrates with the
effect of gravity, the acceleration of the bicycle inclination θbecomes zero, i.e., θ = 0. The acceleration response of the
camber angle has little effect on the posture controller, even
if it is not assumed to be zero. However, it is necessary to
consider it to improve the transient state of the camber angle.
The improvement of transient state is one of the future works
although the posture controller is stable. The steering angle φin equilibrium state is derived from (6) as follows:
−Mghθ + Mhv2
L φ = 0, φ =gL
v2 θ; θ =v2
gL φ. (21)
Substituting (21) into (9),
ξ = ξ(0) +v
L
T
0
φ(t)dt
= ξ(0) +g
v
T
0
θ(t)dt (22)
is derived. From (22), the following equations are obtained:
ξcmd = ξcmd(0) +g
v
T
0
θd(t)dt
ξcmd =g
vθd
θd =v
gξcmd. (23)
Differentiating (20) with respect to time t and substituting it to
(23), the command of the camber angle θd is derived as follows:
ξcmd = xref v
= K x(xcmd − x)v
θd =v
gξcmd
=v
g·
K x(xcmd − x)
v. (24)
Assuming that a bicycle posture is stable like a four-wheel car
[21], [22], the transfer function from the position command in
lateral direction xcmd to the position of lateral direction x is
represented as follows:
xxcmd
= BK 1K x(s2 + K 1Bs + A + BK 1)(s + K x)
. (25)
Fig. 6. Block diagram of lateral velocity controller.
In (25), gain K x is set to a positive value. The block diagram
of the lateral velocity controller is illustrated in Fig. 6. Here,
D = 1/g.
C. Steering Function Controller
The lateral velocity controller is a method that generates the
command of the camber angle θd according to lateral velocity x.
The control structure is simple, but the robustness of the con-
troller is not enough. To address this issue, the steering function
controller, which uses the position of lateral direction x, direc-
tion angle ξ, and curvature κ, is proposed. Before discussing
the steering function controller, two additional parameters are
introduced. One is curvature κ, which is defined by using the
radius of circular orbit R as follows:
κ =1
R
φ
L. (26)
The other parameter is path length s, which is defined by using
bicycle velocity v as follows:
s =
T 0
v(t)dt. (27)
Substituting curvature κ to (8) and differentiating it with respect
to path length s, curvature κ can be represented by direction
angle ξ and path length s as follows:
ξ = ξ(0) +
T
0
v(t)
Lφ(t)dt
= ξ(0) +
T
0
v(t)κ(t)dt
κ =dξ
ds. (28)
Here, the derivative of the curvature by path length dκ/dsis called the steering function. This steering function is used
to generate a control input in the controller. Then, steering
function dκ/ds is set as follows:
dκ
ds= −aκ − b(ξ − ξcmd) − c(x − xcmd). (29)
Here, a, b, and c are positive constants, and ξcmd is the angleof the target straight line. In the case that the angle of target

8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 5/10
TANAKA AND MURAKAMI: STUDY ON STRAIGHT-LINE TRACKING AND POSTURE CONTROL IN ELECTRIC BICYCLE 163
straight line ξcmd and xcmd are zero, steering function dκ/dsbecomes
dκ
ds= −aκ − bξ − cx. (30)
To select appropriate gains of positive constants a, b, and c, (30)
is rewritten as a first-order equation of the system. Here, bicycledirection angle ξ is geometrically represented as follows:
ξ = tan−1 dx
dy. (31)
In the case that the bicycle follows a straight line, the moving
distance of the longitudinal direction becomes much longer
than that of the lateral direction, and bicycle direction angle ξis approximated as follows:
ξ = tan−1 dx
dy
dx
dy. (32)
Similarly, the derivative of path length s is approximated by the
moving distance of the longitudinal direction y. Curvature κand steering function dκ/ds are represented by the derivative of
the moving distance of the longitudinal direction y as follows:
κ =dξ
ds
dξ
dy(33)
dκ
ds= − aκ − bξ − cx
dκ
dy. (34)
From (32)–(34), the first-order equation of the system is de-
rived as
X =
⎡⎣ 0 1 0
0 0 1−c −b −a
⎤⎦X = AX
A ≡
⎡⎣ 0 1 0
0 0 1−c −b −a
⎤⎦X ≡
⎡⎣x(y)
ξ(y)κ(y)
⎤⎦ . (35)
Here, indicates the derivative of the moving distance of the
longitudinal direction y. The characteristic equation of A is
given as follows:
det[λI −A] = λ3 + aλ2 + bλ + c = 0. (36)
To obtain the condition of asymptotic stability, the eigenvalues
λ in (36) must be negative numbers. Assuming that (36) is
rewritten as
(λ + k)3 = 0, k > 0. (37)
eigenvalues λ are selected as negative numbers. Parameter k is
a positive real number. By using k, a, b, and c can easily be
obtained, i.e.,
(λ + k)3 = λ3 + 3kλ2 + 3k2λ + k3
= λ3 + aλ2 + bλ + c
= 0,a = 3k; b = 3k2; c = k3. (38)
Fig. 7. Block diagram of the steering function controller.
From (38), steering function dκ/ds is also determined. To
integrate steering function dκ/ds, the command of the steering
angle φd is derived as follows:
dκ
ds=
1
v·
dκ
dt=
1
vL·
dφ
dt
φd = vL
T
0
dκ
dsdt
= vL
T
0
(−aκ − bξ − cx)dt. (39)
Substituting (39) to (21), the command of the camber angle can
be calculated as
θd =v2
gLφd
=v3
g
T
0
(−aκ − bξ − cx)dt. (40)
Applying θd that was derived from (40), the steering function
controller stabilizes both the bicycle posture and the trajectory.
The block diagram of the steering function controller is illus-
trated in Fig. 7. Here, D = v3/g.
IV. SIMULATION
A. Straight-Line Tracking
Simulations are performed to prove the validity of the three
controllers mentioned in the previous section. In the simulation,
a straight path is assumed to be a target trajectory. For compar-ison, three kinds of simulations, i.e., posture controller, posture
controller with lateral velocity controller, and posture controller
with steering function controller, are performed. Bicycle veloc-
ity v is set to 2.5 m/s. Camber angle θ and steering angle φ are
set to 0◦. Direction angle ξ is set to 2◦, and lateral position x is
set to −0.3 m at the initial state.
In the simulation, a stepwise external force with a magnitude
of 100 N is imposed on the bicycle system for 20 ms at 100 ms
in the camber direction. Here, ζ = 1, and ωn = 8 in (14). Other
bicycle parameters are shown in Table I. The selected gains
are summarized in Table II. In the proposed approach, the
acceleration controller of the bicycle steering has higher gains
compared to the lateral velocity/steering function controller.The gains of the acceleration controller K p and K v are selected
8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 6/10
164 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 56, NO. 1, JANUARY 2009
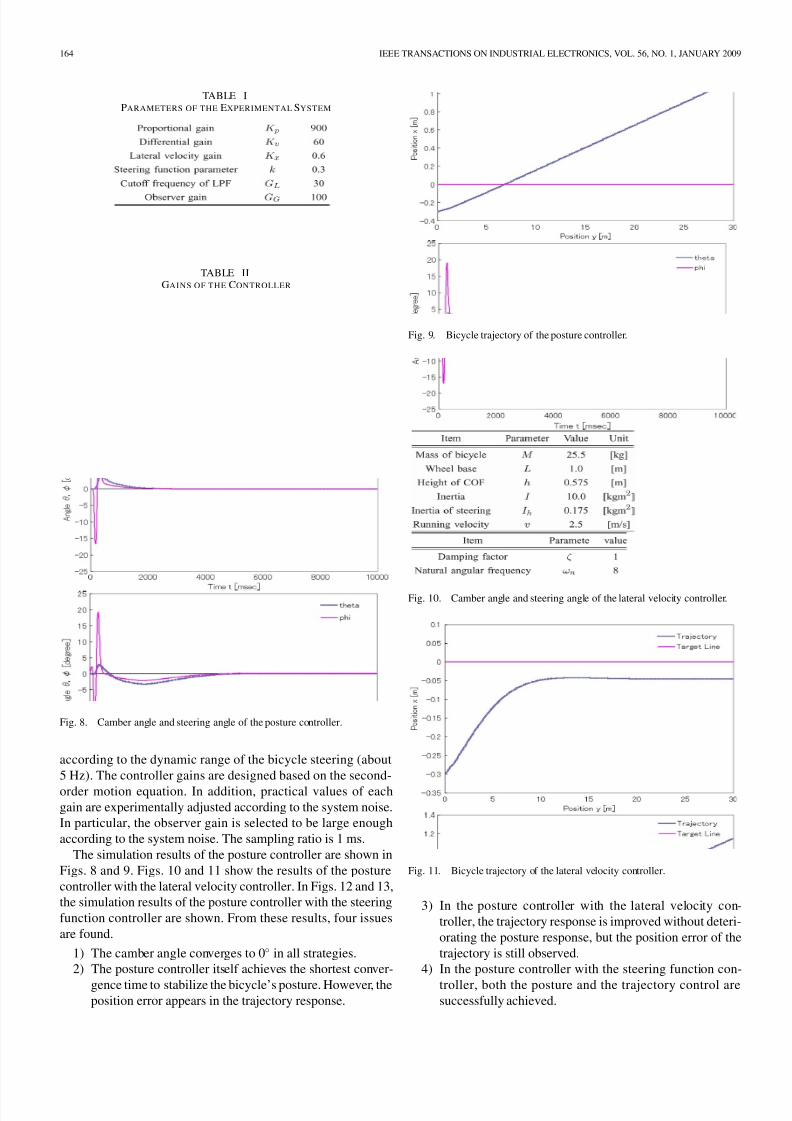
TABLE IPARAMETERS OF THE EXPERIMENTAL SYSTEM
TABLE IIGAINS OF THE CONTROLLER
Fig. 8. Camber angle and steering angle of the posture controller.
according to the dynamic range of the bicycle steering (about
5 Hz). The controller gains are designed based on the second-
order motion equation. In addition, practical values of each
gain are experimentally adjusted according to the system noise.
In particular, the observer gain is selected to be large enough
according to the system noise. The sampling ratio is 1 ms.
The simulation results of the posture controller are shown in
Figs. 8 and 9. Figs. 10 and 11 show the results of the posture
controller with the lateral velocity controller. In Figs. 12 and 13,
the simulation results of the posture controller with the steering
function controller are shown. From these results, four issues
are found.
1) The camber angle converges to 0◦ in all strategies.
2) The posture controller itself achieves the shortest conver-
gence time to stabilize the bicycle’s posture. However, theposition error appears in the trajectory response.
Fig. 9. Bicycle trajectory of the posture controller.
Fig. 10. Camber angle and steering angle of the lateral velocity controller.
Fig. 11. Bicycle trajectory of the lateral velocity controller.
3) In the posture controller with the lateral velocity con-
troller, the trajectory response is improved without deteri-
orating the posture response, but the position error of the
trajectory is still observed.
4) In the posture controller with the steering function con-
troller, both the posture and the trajectory control aresuccessfully achieved.
8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 7/10
TANAKA AND MURAKAMI: STUDY ON STRAIGHT-LINE TRACKING AND POSTURE CONTROL IN ELECTRIC BICYCLE 165
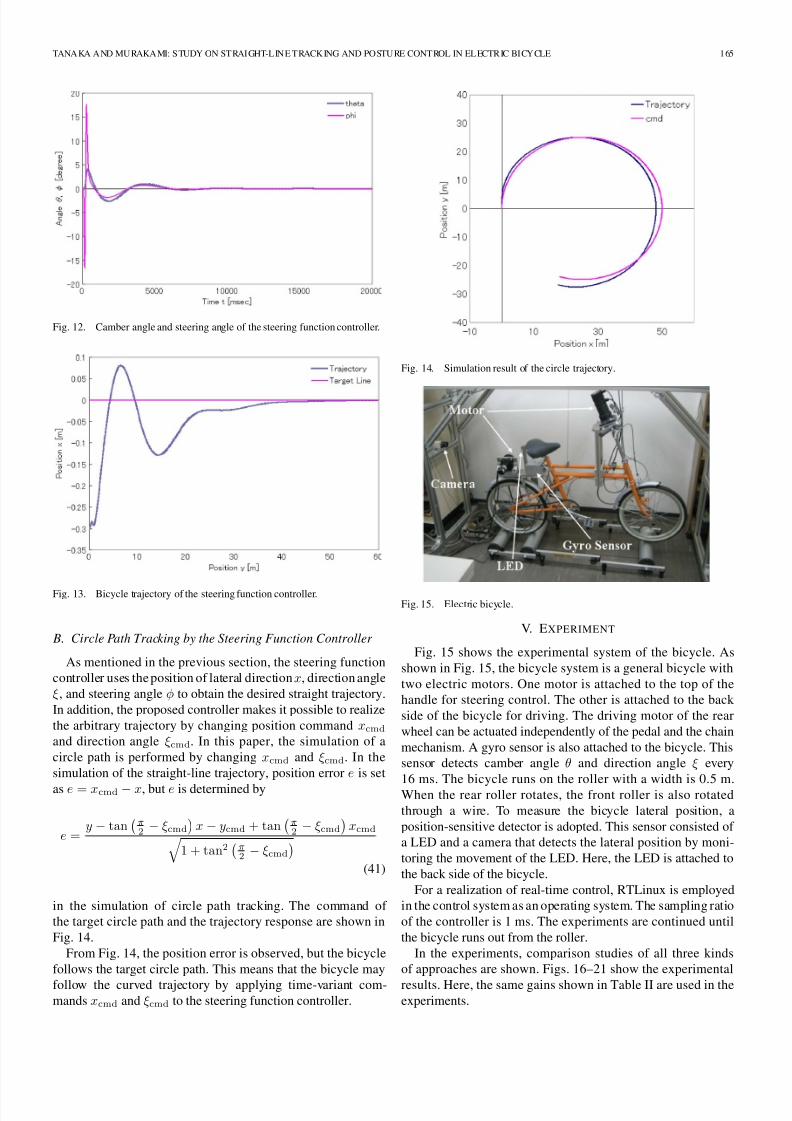
Fig. 12. Camber angle and steering angle of the steering function controller.
Fig. 13. Bicycle trajectory of the steering function controller.
B. Circle Path Tracking by the Steering Function Controller
As mentioned in the previous section, the steering function
controller uses the position of lateral direction x, direction angle
ξ, and steering angle φ to obtain the desired straight trajectory.
In addition, the proposed controller makes it possible to realize
the arbitrary trajectory by changing position command xcmd
and direction angle ξcmd. In this paper, the simulation of a
circle path is performed by changing xcmd and ξcmd. In the
simulation of the straight-line trajectory, position error e is set
as e = xcmd − x, but e is determined by
e =y − tan
π2 − ξcmd
x − ycmd + tan
π2 − ξcmd
xcmd
1 + tan2π2 − ξcmd
(41)
in the simulation of circle path tracking. The command of
the target circle path and the trajectory response are shown in
Fig. 14.
From Fig. 14, the position error is observed, but the bicycle
follows the target circle path. This means that the bicycle may
follow the curved trajectory by applying time-variant com-mands xcmd and ξcmd to the steering function controller.
Fig. 14. Simulation result of the circle trajectory.
Fig. 15. Electric bicycle.
V. EXPERIMENT
Fig. 15 shows the experimental system of the bicycle. As
shown in Fig. 15, the bicycle system is a general bicycle with
two electric motors. One motor is attached to the top of the
handle for steering control. The other is attached to the back
side of the bicycle for driving. The driving motor of the rear
wheel can be actuated independently of the pedal and the chain
mechanism. A gyro sensor is also attached to the bicycle. This
sensor detects camber angle θ and direction angle ξ every
16 ms. The bicycle runs on the roller with a width is 0.5 m.When the rear roller rotates, the front roller is also rotated
through a wire. To measure the bicycle lateral position, a
position-sensitive detector is adopted. This sensor consisted of
a LED and a camera that detects the lateral position by moni-
toring the movement of the LED. Here, the LED is attached to
the back side of the bicycle.
For a realization of real-time control, RTLinux is employed
in the control system as an operating system. The sampling ratio
of the controller is 1 ms. The experiments are continued until
the bicycle runs out from the roller.
In the experiments, comparison studies of all three kinds
of approaches are shown. Figs. 16–21 show the experimental
results. Here, the same gains shown in Table II are used in theexperiments.
8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 8/10
166 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 56, NO. 1, JANUARY 2009
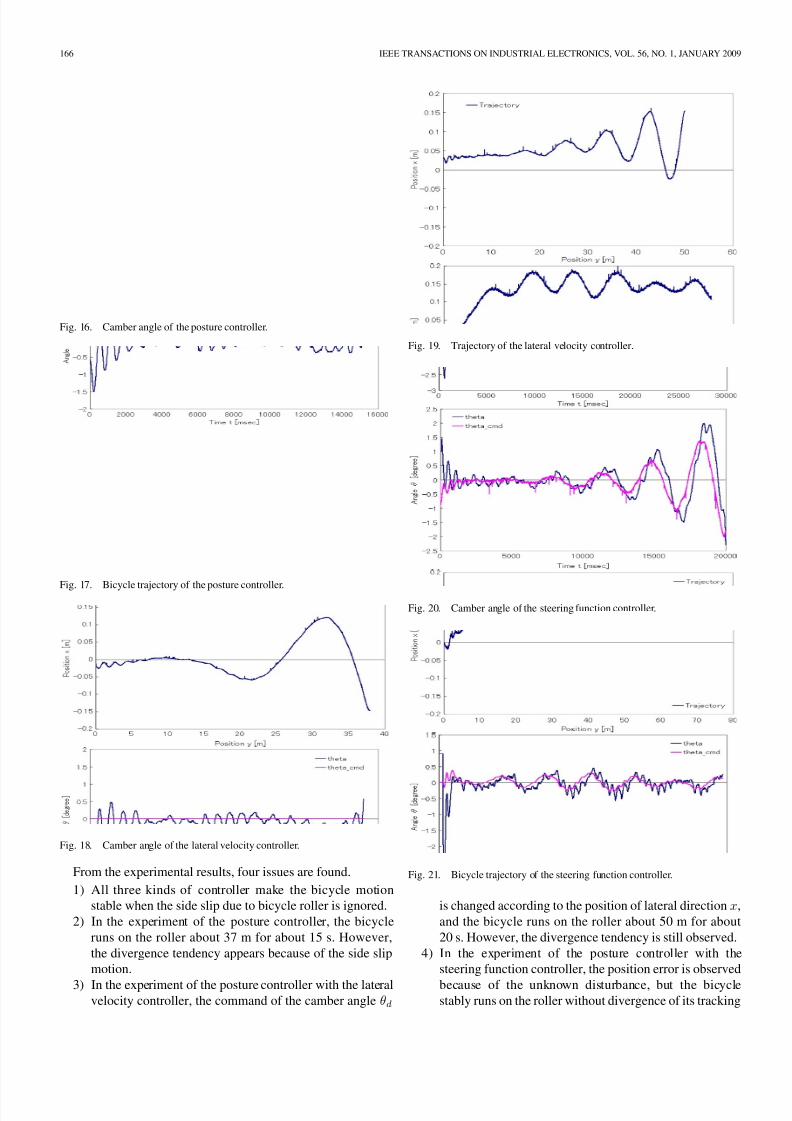
Fig. 16. Camber angle of the posture controller.
Fig. 17. Bicycle trajectory of the posture controller.
Fig. 18. Camber angle of the lateral velocity controller.
From the experimental results, four issues are found.
1) All three kinds of controller make the bicycle motion
stable when the side slip due to bicycle roller is ignored.
2) In the experiment of the posture controller, the bicycle
runs on the roller about 37 m for about 15 s. However,
the divergence tendency appears because of the side slip
motion.
3) In the experiment of the posture controller with the lateralvelocity controller, the command of the camber angle θd
Fig. 19. Trajectory of the lateral velocity controller.
Fig. 20. Camber angle of the steering function controller.
Fig. 21. Bicycle trajectory of the steering function controller.
is changed according to the position of lateral direction x,
and the bicycle runs on the roller about 50 m for about
20 s. However, the divergence tendency is still observed.
4) In the experiment of the posture controller with the
steering function controller, the position error is observed
because of the unknown disturbance, but the bicyclestably runs on the roller without divergence of its tracking

8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 9/10
TANAKA AND MURAKAMI: STUDY ON STRAIGHT-LINE TRACKING AND POSTURE CONTROL IN ELECTRIC BICYCLE 167
path. This means that the steering function controller
is more robust against the road disturbance, i.e., the
side slip.
The experimental results show that the steering function con-
troller is more powerful than the lateral velocity controller in
straight-path tracking of the bicycle, keeping the stable posture
of the bicycle.In the experiments, the observer gain is selected to be large
enough to ignore the time delay compared to the camber re-
sponse of the bicycle. Of course, there are some coupling effects
between the trajectory controller and the posture controller. In
the proposed steering function controller, the controller is con-
structed based on the trajectory parameters, i.e., the direction
angle of the bicycle and the curvature of the bicycle trajectory.
Then, the physical meaning of each feedback gain becomes
clear. The steering function controller has a similar structure as
a PID controller, and the gain adjustment is easy because of the
clear physical meaning of the feedback gains. The instability
behavior does not appear in the experiment of the steering
function controller, as shown in Fig. 20. However, in the lateral
velocity control and the posture control only, the instability
behavior is observed. In the running bicycle experiment, the
bicycle roller is employed as a running road. In the bicycle
roller, the side slip of the bicycle tire that is unusual in the
general road surface arises, and it causes the side slip motion of
the bicycle. The lateral velocity control and the posture control
only are not able to compensate this side slip motion, and the
instability responses of trajectory appear in the experiments,
even if the posture control is stable.
From the simulation and experimental results, it is found that
the difference between simulations and experimental responses
appears. The effect of the tire feature and the sprocket chainstructure cause this difference. The tire feature has high non-
linearity, and it is difficult to employ the dynamic model in the
control algorithm, because the motion equation must be of high
order. In particular, the tire feature is related to the problem of
the side slip phenomenon. This consideration is more difficult.
To simplify the bicycle model, the tire feature is ignored in the
proposed approach. The introduction of the tire model is one of
our next challenges for high-performance bicycle control. Then,
it is also expected that the simulations are well concise with the
experimental responses. In the experiment, the gyro sensor is
utilized to detect the camber response. The detection period is
16 ms although the sampling ratio of the controller is 1 ms. Thismakes it difficult to set a high gain of k in the steering function
controller and causes the response delay, as shown in Figs. 13,
20, and 21. The improvement of the sensor response is also an
important issue from an alternative aspect.
VI. CONCLUSION
In this paper, a simplified dynamic model of a bicycle and
a kinetic model of the bicycle trajectory have been derived.
Moreover, an acceleration-based bicycle controller has been
proposed. First, a controller that may stabilize bicycle posture
has been introduced. Second, two strategies for the bicycle
trajectory control have been proposed. The validity of the pro-posed approaches is confirmed by simulations and experiments.
In particular, the continuous driving of the bicycle is achieved
by using the steering function controller, which is expected to
be applicable to not only the straight-line trajectory but also the
curved trajectory.
In past research, there are a few papers that show experi-
mental evaluation for the self-sustaining control of a bicycle. In
addition, the fusion strategy of the trajectory and self-sustainingcontrol has not been investigated from the viewpoint of a human
assist system. In this paper, however, the bicycle controller that
achieves both the stable posture and trajectory control has been
experimentally confirmed. This means that the feasibility and
the industrial contribution to realize the sophisticated bicycle
with human assist function are strongly expected by the pro-
posed strategy.
Because it is difficult to model the nonlinear characteristics
of the tire and the state change in the road, this paper has
not considered them in the proposed method; however, even if
they are not strictly considered in the experimental results, the
proposed method was able to achieve stabilization control. To
further achieve high accuracy about the control characteristic, it
is necessary to consider the tire characteristic. It is considered
to be a future task for this point.
ACKNOWLEDGMENT
The authors would like to thank the reviewers for their
patience and recommendations.
REFERENCES
[1] Y. Oda, M. Miyamoto, K. Uchiyama, and G. Shimizu, “Study on the
autonomous run by integrated control of bicycle,” in Proc. JSME 11thConf. Transp. Logistics Division, 2002, pp. 97–100.[2] R. S. Sharp, “The stability and control of motorcycles,” J. Mech. Eng. Sci.,
vol. 13, no. 5, pp. 316–329, 1971.[3] K. Astrom et al., “Bicycle dynamics and control: Adapted bicycles
for education and research,” IEEE Control Syst. Mag., vol. 25, no. 4,pp. 26–46, Aug. 2005.
[4] P. A. J. Ruijs and H. B. Pacejka, “Research in the lateral dynamics of motorcycles,” in Proc. 9th IAVSD Symp. Dyn. Vehicles Roads Tracks,1996, pp. 467–478.
[5] Y. Tanaka and T. Murakami, “Self sustaining bicycle robot with steeringcontroller,” in Proc. 8th IEEE Int. Workshop AMC , Mar. 25–28, 2004,pp. 193–197.
[6] Y. Tanaka and T. Murakami, “The bicycle robot driving on an optionaltrajectory,” in Proc. IEEE Int. Conf. Mechatron. Robot., Sep. 13–15, 2004,pp. 641–646.
[7] Y. J. Kanayama and F. Fahroo, “A new line tracking method for non-
holonomic vehicles,” in Proc. IEEE Int. Conf. Robot. Autom., Apr. 1997,pp. 2908–2913.
[8] Y. Ou and Y. Xu, “Stabilization and line tracking of the gyrosco-pically stabilized robot,” in Proc. IEEE ICRA, May 11–15, 2002, vol. 2,pp. 1753–1758.
[9] M. Komoda, Control Engineering. Tokyo, Japan: Asakura-Shoten,1993.
[10] H. Sakai, Tire Engineering. Tokyo, Japan: Grand Prix Publication, 1987.[11] H. Niki and T. Murakami, “An approach to self stabilization of bicycle
motion by handle controller,” IEEJ Trans. Ind. Appl., vol. 125, no. 8,pp. 779–785, 2005.
[12] H. Niki and T. Murakami, “An approach to stable standing motion of electric bicycle,” in Proc. CACS, Tainan, Taiwan, Nov. 18–19, 2005.CD-ROM.
[13] T. Yamaguchi, T. Shibata, and T. Murakami, “Self-sustaining approach of electric bicycle by acceleration control based backstepping,” in Proc. 33rd
IEEE IECON , Taipei, Taiwan, Nov. 5–8, 2007, pp. 2610–2624.[14] D. J. N. Limebeer and R. S. Sharp, “Bicycles, motorcycles, and models,” IEEE Control Syst. Mag., vol. 26, no. 5, pp. 34–61, Oct. 2006.

8/7/2019 A Study on Straight-Line Tracking Bicycle
http://slidepdf.com/reader/full/a-study-on-straight-line-tracking-bicycle 10/10
168 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 56, NO. 1, JANUARY 2009
[15] A. L. Schwab, J. P. Meijaard, and J. M. Papadopoulos, “A multibody dy-namics benchmarkon the equations of motion of an uncontrolled bicycle,”in Proc. 5th EUROMECH Nonlinear Dyn. Conf., 2005, pp. 511–521.
[16] K. Ohnishi, M. Shibata, and T. Murakami, “Motion control for advancedmechatronics,” IEEE/ASME Trans. Mechatronics, vol. 1, no. 1, pp. 56–67,Mar. 1996.
[17] T. Murakami, F. Yu, and K. Ohnishi, “Torque sensorless control inmultidegree-of-freedom manipulator,” IEEE Trans. Ind. Electron., vol. 40,
no. 2, pp. 259–265, Apr. 1993.[18] T. Murakami, N. Oda, Y. Miyazawa, and K. Ohnishi, “A motion con-trol strategy based on equivalent mass matrix in multidegree-of-freedommanipulator,” IEEE Trans. Ind. Electron., vol. 42, no. 2, pp. 123–130,Apr. 1995.
[19] K. Matsushita and T. Murakami, “Nonholonomic equivalent disturbancebased backward motion control of tractor-trailer with virtual steering,”
IEEE Trans. Ind. Electron., vol. 55, no. 1, pp. 280–287, Jan. 2008.[20] H. Takahashi, D. Ukishima, K. Kawamoto, and K. Hirota, “A study on
predicting hazard factors for safe driving,” IEEE Trans. Ind. Electron.,vol. 54, no. 2, pp. 781–789, Apr. 2007.
[21] N. Mutoh, T. Kazama, and K. Takita, “Driving characteristics of anelectric vehicle system with independently driven front and rear wheels,”
IEEE Trans. Ind. Electron., vol. 53, no. 3, pp. 803–813, Jun. 2006.[22] N. Mutoh, Y. Hayano, H. Yahagi, and K. Takita, “Electric braking con-
trol methods for electric vehicles with independently driven front andrear wheels,” IEEE Trans. Ind. Electron., vol. 54, no. 2, pp. 1168–1176,
Apr. 2007.
Yasuhito Tanaka received the B.E. and M.E. de-grees from Keio University, Yokohama, Japan, in2003 and 2005, respectively.
He is currently with the Department of SystemDesign Engineering, Keio University. His researchinterests include robotics, intelligent bicycles, andmotion control.
Toshiyuki Murakami (M’93) received the B.E.,M.E., and Ph.D. degrees in electrical engineeringfrom Keio University, Yokohama, Japan, in 1988,1990, and 1993, respectively.
In 1993, he joined the Department of ElectricalEngineering, Keio University, where he is currentlya Professor with the Department of System DesignEngineering. From 1999 to 2000, he was a VisitingResearcher with The Institute for Power Electronicsand Electrical Drives, Aachen University of Tech-nology, Aachen, Germany. His research interests in-
clude robotics, intelligent vehicles, mobile robots, and motion control.















