Newport gazette (Newport, R.I.) (Newport, R.I.) 1777-06-26 ...
Upload
carlos-curranCategory
view
214download
0
A robotic implementation of rules for social self-regulation
EmergeNET presentation23rd March 2009Torbjørn S. DahlUniversity of Wales, Newport

Defying the rules: How self-regulatory social systems work
Prof Kim Christensen, Imperial College Dr Ana Sendova-Franks, UWE Dr Angela Espinosa, Hull University Dr Torbjørn Dahl, University of Wales, Newport
Aim: To find a set of generic rules that describe emergent
self-regulation in ant, human and robotic social systems

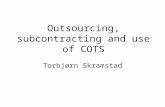
Ants display specialisation
A small fraction of the ants to a large fraction of a task
Task
Ants

Sufficient and necessary requirements for emergent self-regulation
An example of emergent self-regulation in ant systems is “division of labour”
Presence of at least two tasks Differentiation among agents Concurrency of tasks Flexibility in agents

The attractive field model (AFM) of emergent self-regulation
The AMF model is a bi-partite graph Information flow from tasks

Task attraction
jijj
ji
iji
j rtr
tkS
)(
|)(|
)(tanh
i – ant, j – task r – position, δ – avoids division by zero k – learning factor Φ – Max number of ants on task Ψ – Current number ants on task Θ – temporal availability

Action selection
Discrete time steps Random action selection based on task
stimuli Sensitisation and desensitisation:
FLij
ij Kkk /

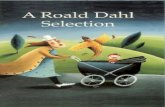
Initial results
As individuals specialise, tracks become straighter and spatial distributions more distinct

AFM in (Temnothorax) ants
o – ants x – tasks (brood sorting,
exploring, grooming, random wandering wall construction
AF – stimuli to perform a given task
Simulation reproduces data from observations
Ongoing studies to refine AFM, in particular w.r.t. learning

AFM in human social systems
o – humans x – tasks AF – motivation to undertake task
(understanding, interest, proximity, politics)

The viable systems model (VSM)
Recursive model of tasks required for systems to be viable
1. Tasks2. Coordination3. Monitoring and
regulation4. External factor
monitoring5. Strategic vision

Flow of information in human social systems
Pedro Pablo Cardoso from the University of Hull is currently studying an eco-village in Ireland
The village aims to be self-organised Initially, a number of tasks were ignored The VSM model has been introduced to the
villagers

Flow of information in human social systems
Observing the elements of AFM Differentiation (skill levels, empowerment) Concurrency (activity of multiple S1 and S2 taks) Flexibility (changing tasks)
Recording data about communication Communication channels Type and quality of information exchange Failures in communication
Recording data about tasks covered From meeting minutes Uncovered tasks

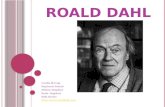
AFM in robot societies
x – robots o – (manufacturing) tasks AF – Robot task awareness

Evaluation of AFM in robots
Task selection and learning is programmed into the robots
Task data and attractive fields implemented on a separate server
Three models of information flow will be compared:
1. Global broadcast of tasks2. Local (robot-robot) communication3. Stigmergic communication through artificial
pheromones

Experimental infrastructure

Metrics for self-regulation
Task completion rates Active tasks Spatial distribution

Future tasks
Accommodating emergent task specialisation within a pre-programmed setup
Pre-program tasks using an implementation of the VSM
Introduce mechanisms to identify and accommodate new tasks or specialisations