
A Review of the Theory of Rolling Contact Stresses
16
Recent developments in the theory of rolling contact stresses are reviewed. They follow three main lines: (I) elastic stresses due to slip and friction at the contact interface, (2) pressures developed in elasto-hydrodynamic lubricating films and (3) the influence of inelastic (-&co-elastic or plastic) behaviour of the material of the rolling solids. The theory of dry rolling contact of elastic solids is now at an advanced state of development. Studies of lubricated rolling and inelastic deformation are restricted to the two-dimensional problems of rolling cylinders. It has been possible however to put forward a tentative theoretical load-carrying capacity for lubric.ated metal rollers, above which continuous permanent deformation will take place. It is suggested that the strength of actual rolling surfaces falls below the theoretical limit due to non-homogeneity of the material and the roughness of the surfaces. These effects are at present beyond the scope of theory but would well repay study. INTRODUCTIOX Two smooth elastic bodies pressed into contact so that they touch over an area which is small compared with the principal radii of curvature of their surfaces experience local contact stresses given closely by the classical Hertz theory of elastic contact. Under what circumstances, we may ask, does the Hertz theory apply with precision to bodies in rolling contact? The main restrictions may be summarised as follows. (I) Perfectly elastic materials. (2) Both bodies have the same elastic constants. (3) The two surfaces are not closely conforming in the contact region. (4) No tangential (tractive) force is transmitted. -0 relative angular velocity of “spin” contacli.flfface. about the common normal to the , * (6) No load-bearing hydrodynamic film between the surfaces. (7) Topographically smooth surfaces. It will be appreciated that most of these restrictionseliminate non-conservative forces ; friction at the interface, hysteresis in the material and viscosity of a lubricant * Prescntcd to the O.E.C.D. Sub-group on Rolling Wear at Dclft, April 1905
-
Upload
finney-charles -
Category
Documents
-
view
169 -
download
8
Transcript of A Review of the Theory of Rolling Contact Stresses
Recent developments in the theory of rolling contact stresses are reviewed. They follow three main lines: (I) elastic stresses due to slip and friction at the contact interface, (2) pressures developed in elasto-hydrodynamic lubricating films and (3) the influence of inelastic (-&co-elastic or plastic) behaviour of the material of the rolling solids.
The theory of dry rolling contact of elastic solids is now at an advanced state of development. Studies of lubricated rolling and inelastic deformation are restricted to the two-dimensional problems of rolling cylinders. It has been possible however to put forward a tentative theoretical load-carrying capacity for lubric.ated metal rollers, above which continuous permanent deformation will take place. It is suggested that the strength of actual rolling surfaces falls below the theoretical limit due to non-homogeneity of the material and the roughness of the surfaces. These effects are at present beyond the scope of theory but would well repay study.
INTRODUCTIOX
Two smooth elastic bodies pressed into contact so that they touch over an area which is small compared with the principal radii of curvature of their surfaces experience local contact stresses given closely by the classical Hertz theory of elastic contact. Under what circumstances, we may ask, does the Hertz theory apply with precision to bodies in rolling contact? The main restrictions may be summarised as follows.
(I) Perfectly elastic materials. (2) Both bodies have the same elastic constants. (3) The two surfaces are not closely conforming in the contact region. (4) No tangential (tractive) force is transmitted.
-0 relative angular velocity of “spin” contacli.flfface.
about the common normal to the , * (6) No load-bearing hydrodynamic film between the surfaces. (7) Topographically smooth surfaces. It will be appreciated that most of these restrictionseliminate non-conservative
forces ; friction at the interface, hysteresis in the material and viscosity of a lubricant
* Prescntcd to the O.E.C.D. Sub-group on Rolling Wear at Dclft, April 1905

THEORY OF ROLLING CONTACT STRESSES 5
film. The contact stresses are then not dependent upon the history of loading;
rolling contact is the same as static contact.
Recent developments in the theory of rolling contact stresses, which form the
subject of this paper, are chiefly concerned with relaxing one or more of the restric-
tions enumerated above, thereby introducing irreversible effects. In consequence, it
becomes necessary to consider the rolling process in its own right and to distinguish
between rolling and static contact.
In presenting these developments it is convenient to separate them into three
categories,
(i) The effects of friction forces and slip at the interface, thereby relaxing
restrictions (z), (3), (4) and (5).
(ii) The influence of a hydrodynamic lubricating film between the surfaces
(restriction (6)).
(iii) The influence of inelastic properties of the material, either visco-elastic or
plastic (restriction (I)). Before proceeding to particular problems, further distinctions of a general
nature can usefully be made. The rolling process which is taking place under the action
of steadily applied loads separates into two parts; a transient state which is associated
with the initial phase of the motion and the sequence of application of the loads,
followed by a steady state of contact stress which remains unvarying with time as long
as the rolling motion proceeds. The transient state is of importance in a rolling action
where there are rapid changes of load or velocity as, for example, in a gear tooth
engagement cycle. Transient effects have been observed in a number of experimental
studies, but so far the theory of rolling contact stresses has considered only the
steady state.
The deformation in steady rolling is conveniently approached from the Eulerian
point of view. The nominal point of contact is taken as the origin of coordinates;
material of both solids “flows” steadily through a strain field in the contact region
which does not change with time.
It is not surprising that the first theoretical treatment of each new problem
should be restricted to one of plane deformation. All real problems, however, are
three dimensional. It is even difficult to carry out laboratory tests which approach
plane-strain conditions at all closely. The present state of rolling contact stress theory
presents many opportunities to extend existing theory into three dimensions.
TANGENTIAL TRACTIONS AND MICRO-SLIP
Conditions at the interface It is now generally recognised that the existence of friction forces at the
interface between rolling elastic bodies results in the division of the contact area into
a region or regions of micro-slip, and regions of adhesion within which the surfaces
roll without relative motion. The boundary conditions in these regions have been
discussed by JOHNSON~ and BUFLER~.
In the coordinate system used, oxy is the common tangent plane and oz is the
common normal at the nominal point of contact. As steady rolling proceeds, material
flows into the field of elastic deformation with a velocity U chosen parallel to the
x-axis. At a point (x,y) on the interface a particle of one body will have velocity
Wear, g (1966) 4-19

components Y.~ and y!, given b!
where u and 7) are components of elastic displacement of the surface at the point (x, y) in the x andy directions. The components of velocity of slip at any point on the interface are thus
S.r = qq - qq
SY = 9Y1 - 9Y2
where the subscripts I and z refer to contacting points on the surface of each body. Clearly, in a region where there is no slip, S,r = s2/ = 0 (I)
which leads to the conditions
where & and ty are constants independent of x and y.
Now
and thus represents the fractional difference in rolling speed of the two surfaces,
which represents a small relative motion of the two surfaces perpendicular to the rolling direction,
This phenomenon is commonly known as “creep” and t5 and tl/ are referred to as the longitudinal and transverse creep ratios respectively.
At a point in a region where micro-slip is taking place, the slip velocities ss and s?, are not zero, but the tangential traction Q(x, y) reaches its limiting value, viz.
IQI = {X%y) + J'WY))~ =,uZ(x,y) (4)
where X and Y are components of Q, Z is the normal pressure at the point in question and ,u is the coefficient of limiting friction, usually taken to be constant. In addition, it is necessary to specify that the direction of the frictional traction Q is opposite to that of the velocity of slip s, thus
arg. Q = arg. s+n (5)
The complete solution for the contact stresses in a rolling problem involving
WLW, o (1966) 4-19
THEORY OF ROLLING CONTACT STRESSES 7
friction must satisfy the conditions governing surface displacement, (a) and (3), in
the adhesion region and the conditions governing surface traction, (4) and (s), in the micro-slip region. In view of the mixed boundary conditions, together with the fact tha.t the shape of boundary separating the adhesion region from the slip region is not known in advance, complete solutions have not yet been obtained to any but the simplest two dimensional problems.
In order to make progress it has been necessary to follow various approximate procedures. First of all, it is usual to assume that the tangential tractions do not in- fluence the distribution of normal contact pressure. With practical values of Poisson’s ratio and coefficient of friction, no very serious error is introduced. Exact solutions by
BuFLER~ of two special problems discussed later enable the consequences of this simplification to be assessed.
To combat the difficulty of an adhesion region of unknown shape three lines of approach have been tried.
(I) Solutions are obtained for either or both of the two limiting cases: (a) no slip anywhere in the contact area ,G-+OO and (b) complete slip everywhere ,u-+o. The actual distribution may then be estimated by interpolation. This method is successful where the actual conditions are close to one or other of the two possible extremes.
(z) A shape for the region of adhesion is guessed on the basis of experiment or intuition, which makes a solution in closed form possible. The correctness of the guess can subsequently be checked.
(3) The contact area is divided into thin strips parallel to the direction of rolling. Two dimensional theory is applied to the slips and interaction between them is ignored. The approximation involved here is close for elliptical contact areas having the major axis perpendicular to the rolling direction.
Particular problems will now be reviewed to which solutions have been obtain- ed along these general lines.
Rolli~~g bodies of differing elasticity When two bodies having different elastic constants roll freely together the
reciprocal pressure which acts on each gives rise, in general, to unequal tangential displacements of the surface. With zero friction slip occurs without restriction and the contact stresses are purely Hertzian. The existence of friction, however, tends to prevent slip and tangential surface tractions are introduced. This problem was discussed qualitatively by Reynolds in 1875.
The other extreme case of no slip anywhere, has been studied for contacting cyhnders by BUFLER~~~ and JOHNSON~, and for a circular contact area (e.g. sphere on aplane)by GOODMAN,JEFFERISAND JOHNSON".
The magnitude of the tangential traction is proportional to the constant x where
(I--zY~)(I+YI)Ez-(I-ZYZ)(I+YZ)E~ ~=------ (I-vl2)&+(1-v22)E1 ---
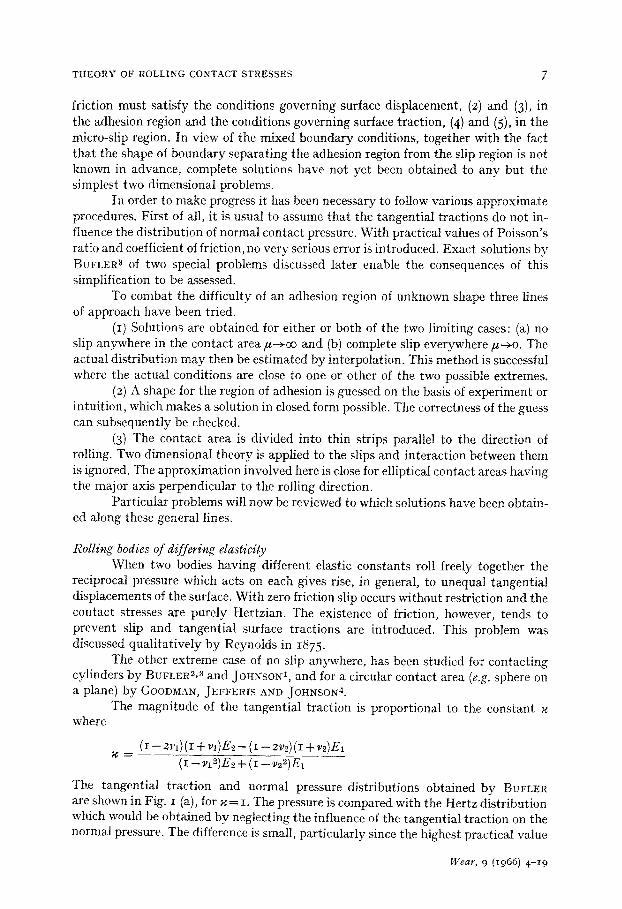
The tangential traction and normal pressure distributions obtained by BUFLER
are shown in Fig. I (a), for X= I. The pressure is compared with the Hertz distribution which would be obtained by neglecting the influence of the tangential traction on the normal pressure The difference is small, particularly since the highest practical value
Wear, g (1g66) 4-19
s Ii. I,. ~oHs~o’\
of K is about 0.4; a result which gives confitlt9cc~ in making the same al)~)roxim;ltiol1 in other prohlcms. I;urther, the tangential traction onl\. ~~xwtds LO”,, of thcs norm2 pressure OVCT kss than IO”:, of tlw contact arw. Thus for ,j,~,< 0.2 tlwrc~ \vill 1~ \‘cI-\’ little slip and tlic present limiting solution is probably CL good al)l)ro.uinlation to tlkx trW State of affa.irS. (‘WefUl ~?qxTinl~IltS by ~EPFERIS ?f d.4 SUppOt? thk c~Oll~~llSiotl.
.I problem of practical inttwst nhic.11 has many features in common with tllc, one just discussed concerns rollrrs covered \vith a thin layer of more flexible material. An analysis neglecting friction has becii givcw by l’AI&HS. .A mow clc$ailcd study is now being made by the author
Dmensionless coord. %=x/a
f! 0.50 2 kz h 5 Q25 E b z
Dimensionless coord.X=XJa
(b)
Fig. 1. The influence of interaction bct\vcen tllc tangential traction ;~n(l the nornlal p-cssun (from 1sUFLEK3). The dotted curve is the Hertz pressure which ncglcxts the Interaction. (a) Different elastic constants, x = 1. (1,) Combined ant1 sliding, it = 1, p =- I.
Tangential forces
The influence of tangential forces on rolling contact stresses has the longest history of any problem considered in this way, The plane problem with a force in tht direction of rolling was investigated independently by CARTER", Fikn? and POIU~IS- ICTX. Their results are in agreement and their solution remains the only one involving micro-slip which is in any sense complete. This work led to the important conclusion that, in rolling, the adhesion zone is adjacent to the leading edge of the contact area; in contrast to the static problem where the adhesion zone is centrally placed.
Here again it is usual to neglect the effect of the tangential traction upon the distribution of normal pressure, but BVFLER~ has solved the special case of complete sliding in which this interaction is taken into account. The pressure distribution and the tangential traction are shown by the same curve (since the value ,u = I has been used) in Fig. I (b). The difference compared with the Hertz distribution is not great, particularly when it is remembered that practical values of ,U are appreciably less than unity.
Rolling bodies of more general shape have been considered, having an elliptical contact area and transmitting both transverse and longitudinal tangential forces. ~'EK~IEULEK .w~) JoH~~\'sc)N~~~~ assumed the adhesion region to be elliptical in shape and obtained approximate surface stresses in closed form. HXINES ANI) OLLERTOX~‘~‘” used a strip theory which suggested that the adhesion region was lemon shaped, as observed on photo-elastic models. KALKEK 18 studied the limiting problem of no-slip and obtained exact results which gave an excellent correlation with experiments at small values of tangential force.

THEORY OF ROLLING CONTACT STRESSES 9
Although a complete thIee-dimensional solution is not yet available, this
problem is now well understood and existing theories are capable of giving results of
acceptable engineering accuracy. Of more immediate concern is the discrepancy which
seems to exist between the theoretical predictions and measured creep ratios at high
rolling speeds.
Close conformity Bodies whose profiles conform closely in the transverse direction to the track
on which they roll, deep groove ball-bearings for example, introduce tangential
tractions and micro-slip in the contact area due to surface points lying at appreciably
different distances from the axis of rotation. HEATHCOTE~~ drew attention to this
feature of ball-bearing behaviour and obtained a limiting solution to the surface
tractions on the basis of complete slip throughout the contact ellipse. JOHNSON’
used a strip-theory to show that with practical values of conformity an appreciable
adhesion region exists, particularly in the centre of the track where the contact
pressure is high. Independently HALLING 15 studied the combined effect of conformity
and tangential force and was able to draw the conclusion that wear could be minimised
when the combined effect of conformity and tangential force reduced the creep ratio
to zero.
Spin An angular velocity of spin oZ about the common normal oz to the contact
surfaces is a well-known feature of angular contact ball-bearings and variable-speed
friction drives.
An attack on this difficult problem including tangential forces was made by
LLJTZ~~ and WERNITZ~~ from the standpoint of complete slip. Starting from the other
extreme and assuming no-slip JOHNSON~~~~~ calculated tangential tractions and
showed that a sphere which was spinning whilst rolling in a straight line developed
a transverse force somewhat analogous to the Magnus effect in fluid mechanics. A
more exact treatment of the same problem was made by KALKER~~.
It is important to appreciate that the conditions of no-slip (eqns. (2) and (3)),
when applied to the complete contact area, do not uniquely define the state of stress
since they are in terms of the derivitives of surface displacements. Physical conditions
have then to be invoked to choose between alternative solutions. JOHNSONI* made
the tangential traction vanish at the leading point (-a,~) of the contact area.
KALKER13 made it vanish at all points on the leading edge of the contact area. This
latter condition approaches more closely the physical necessity of no impending slip
at the leading edge, and thus results in a more exact solution. It would thus appear
that the unequivocal solution to the no-slip problem can only be reached via the
complete solution with slip, by taking the limit as the coefficient of friction pu-tco.
A no-slip solution applies only when the angular velocity of spin is small. Unfortu-
nately many cases of practical interest lie between the small-spin theory of KALKER,
and the complete slip theory of WERNITZ. A more complete solution involving both
adhesion and micro-slip, even though approximate, would be of great value.+
This section will be concluded by a statement of the non-dimensional para-
meters which govern the tangential tractions X and Y during rolling when spin is
+ An interesting new approach to this p-ioblem has been presented by KALKER, see p. 20.
Wear, g (1966) 4-19

thus \vrite:
(01
where ZO is the maximum normal pressure, ,Y the normal force, Y‘,, 7’, the components
of the tangential force, Ii the rolling radius and I’ the rolling velocity.
ELtlSTO-HvDROI)TNARI~ LUBRI(‘ATION
It is now well established that load-bearing hydrodynamic films of practical thickness (> 10-4 cm) are developed between rolling surfaces at normal speeds and at loads sufficient to take hard steels up to their elastic limit. This is a consequence of the rapid rise in the viscosity of typical lubricating oils with contact pressure. From the point of view of this review, we are concerned only with the distribution of pressure and tangential traction in the loaded region from which the contact stresses can be obtained.
To obtain a theoretical pressure distribution it is necessary to solve, simultane- ously, Reynold’s equation for the pressure in the film and the elastic deformation of the rolling surfaces under the action of this pressure. In pure rolling very little heat is generated in the film and it has been found to be satisfactory to assume isothermal behaviour. C‘ROOK~O first showed that the film thickness was determined by the oil
viscosity at entry to the contact region, which is effectively controlled by the temper-
ature of the rolling surfaces. At high loads the elastic deformation of the rollers is
considerably greater than the thickness of the oil film; the film is approximately
parallel through the contact and in consequence the pressure distribution is fairly
close to a Hertz contact pressure. Increasing load causes more elastic deformation but
only slightly reduces the film thickness.
Of the considerable amount of work done on this problem, that of DO~SON
et al. 21,2% is the most complete and relevant to the question of stress distribution. The)
have expressed the contact pressure non-dimensionally in terms of three parameters,
IliZ.
P =@(U*, G, W) (7)
where P =9/E’, U* =r UIE’R’,G = E’handW = NIE’R’andpis thecontactpressure
at any point.
I F= equivalent elastic modulus
I I--Y12
[
I-vy2'L =- ----+f
2 El Ez 1 I
F= equivalent radius of rollers
=k+; ?
iii = normal load per unit width
q. = oil viscosity at inlet
0~ = pressure viscosity index
Wear, g (IgG6) 4-19
THEORY OF ROLLIKiC CONTACT STRESSES II
RLOK has pointed out that the three parameters used by DOWSON et al. are
not independent. It is therefore possible to express the pressure in simpler form:
GP = @I (G2 W, G4 U*) (8)
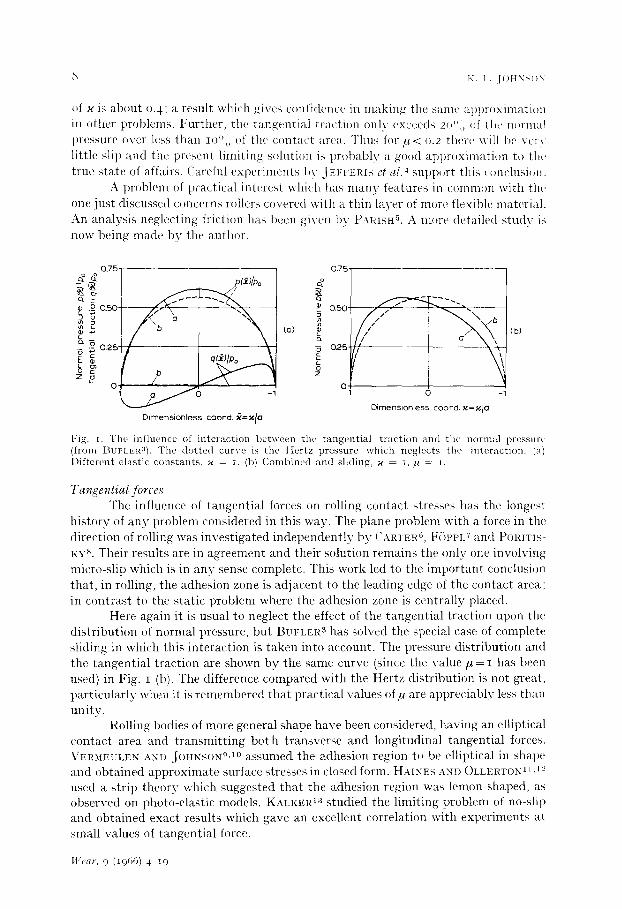
The parameter G has a value of about 5000 for steel rollers lubricated by a typical mineral oil and permits little variation. Pressure distributions and elastic stress fields have been calculated”3 for various values of U* and W. Typical pressure distributions are shown in Fig. z. Tangential tractions were found to be negligibly
Fig. 2, Elasto-hydrodynamic pressure distributions (from DOWSON, HIGGINSON AND 'iliHITAKERz3).
(a) Pressure distributions for lesser load; U = (o), o (dry contact) ; (I), 10-l~; (z), 10~~~; (3). IO-~';
(4), IO-'0; (5), IO-9;(5#, IO-9.3; (6), 10-s; w = 3 . IO-J; G = 5000. (b) Pressure distributions for greater load; U = (0). o {dry contact); (3), IO-“; (5)‘ 10-9; W = 3 . 10-4; G = 5000.
small. With high loads and not excessive speed the pressure distribution is basically Hertzian, but with one surprising distinction, an intense, but highly localised, pressure spike occurs on the exit side. This feature of the theory of elasto-hydro- dynamic lubrication has given rise to much speculation. It is not possible to state with certainty, whether or not it really exists and its effect upon the strength of the rolling surfaces. CROOK’S measurement of the deformed profile of lubricated rollers exhibited the sort of re-entrant shape towards the trailing edge which is consistent with a second pressure peak. However, even if the fine spike does exist, it does not appear to have a serious influence upon the stress field. The maximum shear stress in the rollers is not located beneath the spike except at the highest values of the speed parameter U*. A concentration of shear stress close to the surface is a consequence of
Wear, g (1966) 4-19

I .! Ii. I.. JOHSSOS
where fiO is the maximum Hertzian pressure under the same load,
In the range of loads and speeds computed it appears that the form of the pressure distribution p/,$0 is determined primarily by the parameter CJ*/JVz, With the data available, this hypothesis must remain rather tentative for the time being. If it is substantially correct, however, we may conclude that that distribution of contact stress may be expressed in terms of a single parameter taking into account both speed and load. This conclusion is made use of in the next section.
Sliding combined with rolling presents a difficult theoretical problem since it is no longer adequate to assume isothermal conditions. A first attempt by CHEXG ANI)
%ERNLICHT24 has just been presented. As expected, the film thickness for a given load and speed is little different from isothermal predictions since the film thickness is set by conditions at entry. Rather more surprising, the pressure spike remains. We are likely to hear much more on this problem in the near future and some refined experi- mentation will be required to substantiate and perhaps to help choose between, the results of theoretical ana1yses.t
The discussion so far has been based on the lubrication of metal rollers with normal mineral oils. Rolling elements of appreciably lower elastic moduli, rubber for example, develop much lower contact pressures and elasto-hydrodynamic action is possible with lower viscosity fluids which have zero pressure dependence such as
water. Using the inverse hydrodynamic method, i.e. calculating the shape of the deformed profile from prescribed pressure distributions, BLOKES has studied this range of the problem in some detail.
INELASTIC DEFORMATIOS
It has long been recognised that inelastic deformation plays a significant part in the mechanics of rolling motion. Material hysteresis is generally agreed to be re- sponsible for rolling resistance except in situations involving close conformity or spin where micro-slip effects predominate. Hysteresis in metals loaded elastically is small, but it is much greater in rubber or polymeric materials. An approach through the theory of linear visco-elasticity has made some progress. All but the hardest metals reach their yield point under rolling contact loads which arise only too easily in practice. Evidence of plastic deformation in railway rails, gear teeth and rolling
t For the latest developments the reader is referred to Proc. Symp. on Elastohydvodymmaic Lubricu- tion, Leeds, Septenzber 1965, Inst. Mech. Engrs., London, 1966.
IYmr, g (rgG6) 4-19

THEORY OF ROLLING CONTACT STRESSES I3
contact bearings is commonly observed and associated with failure and fatigue in
rolling contact, First steps have been taken to apply the theory of plasticity to this problem.
A rigid body rolling on the surface of an inelastic material experiences a higher pressure on the leading side of the contact area than on the trailing side. A
moment must therefore be applied to the rolling body to overcome the resistance to
motion exerted by the unsymmetrical pressure distribution. If the material is visco- elastic the contact pressure distribution and hence the rolling resistance will be much
influenced by the rolling speed. At low speed the material will recover at the trailing side of the contact sufficiently quickly to maintain a fairly symmetrical distribution
of pressure, so that the rolling resistance will be small. At high speed the material will not recover sufficiently quickly to even make contact on the trailing side. Also the resistance of the material to rapid compression on the leading side of the contact will,
for a given load, considerably reduce the indentation and contact area, with a corre- sponding reduction in rolling resistance. Thus there is a speed at which the resistance is
at a maximum which is observed to be of the order of the magnitude of a/r, where a is the semi-contact width and t is a mean relaxation time for the material
Simple theories of the process have been put forward, for a rolling cylinder by
MAY, MORRIS AND ATACK~~ and for a ball by FLOM AND BUECHE~~. Their approach has been to represent the material by a series of parallel linear Maxwell elements which
undergo compression and recovery during rolling. Shear between the elements is ignored. ~R~EN~~ooD, MINSHALL AND TABOR 28 have demonstrated the ~portan~e of
the complex strain cycle, including reversed shear, in rolling contact and suggested an ingenious, but greatly simplified theory, to account for it. More recently HvNTER2g
and MORLAND~~ have developed rigorous two-dimensional continuum theories for general linear visco-elastic solids. It is difficult to assess them however, in view of the fact that the behaviour of most polymers and elastomers is not closely described by linear visco-elasticity.
Eiastic-plastic materials The load at which a metal first yields in rolling contact may be calculated
using elastic theory together with an appropriate yield criterion. It is well known that freely rolling cylinders yield first at a point beneath the surface when
PO = 3.1 k+ (10)
where PO is the maxims Hertz pressure and k is the yield stress of the material in simple shear. In combined rolling and sliding the critical shear stress occurs at a point which approaches the surface with increasing tangential traction and lies in the sur- face when ~1 reaches the value 0.26.
It does not follow, however, that a load in excess of the elastic limit will cause continuous plastic deformation during repeated rolling contact cycles. During the first contact cycle the surface material is plastically compressed and residual com- pressive stresses acting parallel to the surface are introduced. During subsequent
t This result is obtained by using the van Mises criterion of yielding. It has been shown31 that whatever the yield criterion, for first yield 2.7 k< PO< 3.3 k .
Wear, g (x966) 4-19
‘4 Ii. I.. JOHSSOS
rolling cycles the material is subjected to the combined action of residual and contact stresses. Further vielding is less likelv and a steady-state may be reached in which thch material is no longer stressed beyond its elastic limit. This process is known as “shakc- do\vn” and the maximum load for which it occurs will be called the shakedown limit
It has proved possible to apply Mclan’s Shakedown Theorem from the theor! of plasticity to the plane-strain rolling contact problems of pure rolling:” and also combined rolling and sliding”“.
In pure rolling the shakedown limit was found to be given by
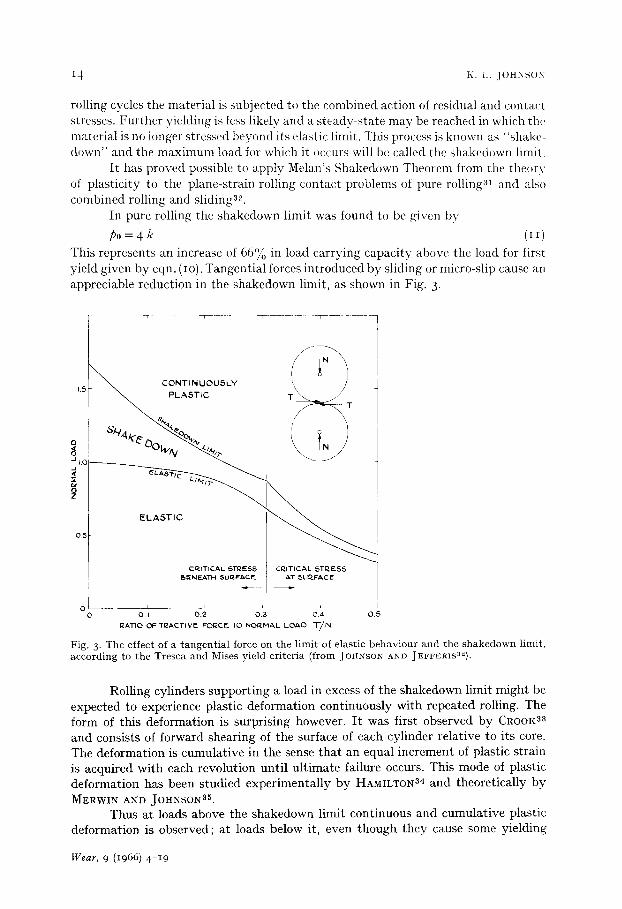
po=dk (11) This represents an increase of 667; in load carrying capacity above the load for first yield given by eqn. (IO). Tangential forces introduced by sliding or micro-slip cause an appreciable reduction in the shakedown limit, as shown in Fig. 3.
CONTINUOUSLY
PLASTIC
ELASTIC
CQlTIC‘,LSTQESS ATSVQFACE
0 L_. /..__L_ -I
0 0.1 0.2 0.3 0.4 0
PATIO OF TPACTIVC FORCE TO NORMAL LOAD T/N
i ‘.5
Fig. 3. The effect of a tangential force on the limit of elastic behaviour and the shakedown limit, according to the Tresca and Mises yield criteria (from JOHNSON AND JEFFERIS~~).
Rolling cylinders supporting a load in excess of the shakedown limit might be expected to experience plastic deformation continuously with repeated rolling. The form of this deformation is surprising however. It was first observed by cROOK33
and consists of forward shearing of the surface of each cylinder relative to its core. The deformation is cumulative in the sense that an equal increment of plastic strain is acquired with each revolution until ultimate failure occurs. This mode of plastic deformation has been studied experimentally by HAMILTON~~ and theoretically by MERWIN AND JOHNSON~~.
Thus at loads above the shakedown limit continuous and cumulative plastic deformation is observed; at loads below it, even though they cause some yielding
Wear, 9 (1966) 4-79
THEORY OF ROLLING CONTACT STRESSES I5
initially, after a few revolutions the system shakes down to an elastic cycle of stress. It is claimed, therefore, that the shakedown limit can be regarded as the theoretical ulti- mate load-carrying capacity of arollingcontact ; the best whichcould be achievedif other influences such as wear, scuffing or fatigue did not intrude to cause premature failure.
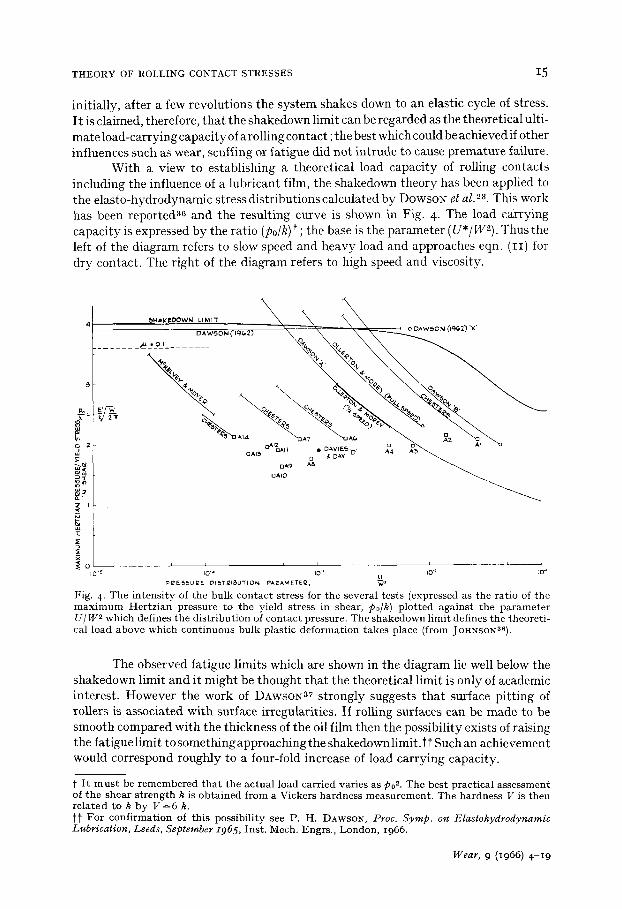
With a view to establishing a theoretical load capacity of rolling contacts including the influence of a lubricant film, the shakedown theory has been applied to the elasto-hydrodynamic stress distributions calculated by DOWSON et a1.23. This work has been reported36 and the resulting curve is shown in Fig. 4. The load carrying capacity is expressed by the ratio (@o/k)+ ; the base is the parameter (U*/bV). Thus the left of the diagram refers to slow speed and heavy load and approaches eqn. (II) for dry contact. The right of the diagram refers to high speed and viscosity.
2 L 20 --’
10-s MY 10’1 IY 17
PPE55UPE DI5TPI0”TION PAPAMETEP. yz Fig. 4. The intensity of the bulk contact stress for the several tests (expressed as the ratio of the maximum Hertzian pressure to the yield stress in shear, $0/k) plotted against the parameter U/W2 which defines the distribution of contact pressure. The shakedown limit defines the theoreti- cal load above which continuous bulk plastic deformation takes place (from JOHNSON~~).
The observed fatigue limits which are shown in the diagram lie well below the shakedown limit and it might be thought that the theoretical limit is only of academic interest. However the work of DAWSON 37 strongly suggests that surface pitting of rollers is associated with surface irregularities. If rolling surfaces can be made to be smooth compared with the thickness of the oil film then the possibility exists of raising the fatiguelimit tosomethingapproachingtheshakedownlimit.tt Suchan achievement would correspond roughly to a four-fold increase of load carrying capacity.
t It must be remembered that the actual load carried varies as p ss. The best practical assessment of the shear strength k is obtained from a Vickers hardness measurement. The hardness V is then related to k by V==6 k. tt For confirmation of this possibility see P. H. DAWSON, Proc. Symp. on Elastohydrodynamic Lubrication, Leeds, September 1965, Inst. Mech. Engrs., London, 1966.
Wear, g (1966) 4-19
IO Ii. 1.. JOHNSO\
Wear, g (1966) 4-19
THEORY OF ROLLING CONTACT STRESSES I7
CONCLUSIONS
Recent developments in the theory of rolling contact stresses have been reviewed. It remains to assess the present position and perhaps suggest the lines along which future developments would be valuable.
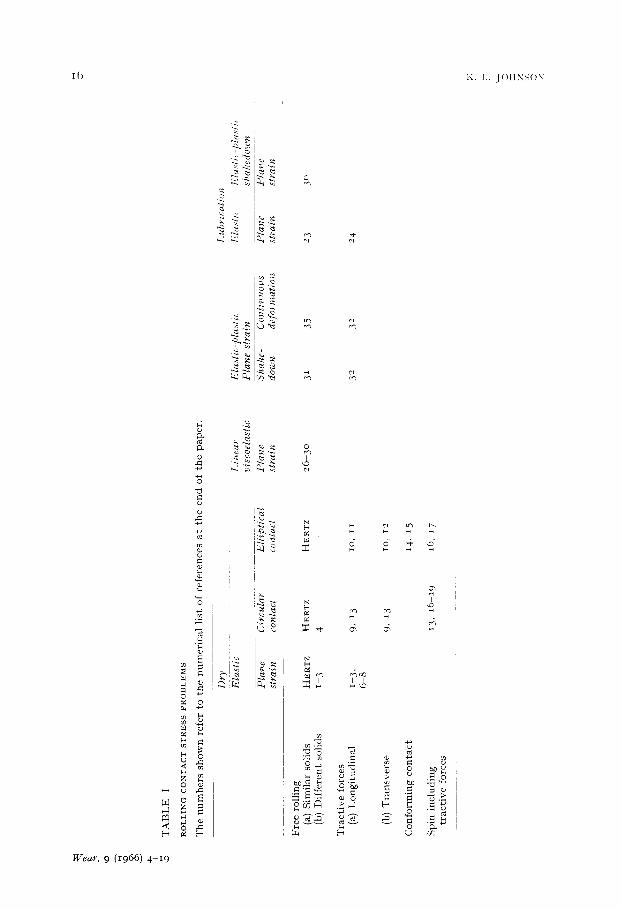
The various problems, showing the present position, have been laid out in Table I.
From an engineering point of view the position with regard to dry elastic contacts in steady rolling is reasonably complete. The outstanding problem of tractive forces combined with practical values of spin is likely to be resolved, approximately at least, in the near future. It remains to study the transient problem. Also important is the influence upon contact stresses of irregularities of surface topography, for example, errors in the axial profile of a roller. In fact surface irregularities affect many aspects of the rolling contact process including lubrication and plastic deformation, since rolling along an uneven surface will lead to unsteady contact stresses through dynamic action. This whole question is virtually unexplored.
There is lively activity in the field of elasto-hydrodynamic lubrication. The important problem of rolling and sliding is close to solution assuming Newtonian behaviour of the oil. It is still an open question whether non-Newtonian effects are important in severe sliding and, if so, how they should be treated. The practical operating range of good quality steel surfaces in rolling contact, such as rolling bearings or gears, is such that the degree of surface roughness has the same order of magnitude as the oil film thickness. This brings us back to the effect of surface irregu- larities. How do they affect the behaviour in lubricated rolling? In particular, we may ask, at what point in the development of an elasto-hydrodynamic film do the contact stress patterns based upon dry contact and Coulomb friction become meaningless.
Although the present two-dimensional theory is adequate for the contact of rolling cylinders having even a relatively short axial length, it would be extremely valuable to have elasto-hydrodynamic solutions for a point contact, a ball on a plane for example. A very simple theory and experimental observations have been given by ARCHARD AND KIRK~~. A strip-theory might provide a useful step towards the major computing task of a complete three-dimensional solution.
The theory of plastic deformation and shakedown have led to a theoretical load-carrying capacity for cylinders. The corresponding problem for point contact is much more difficult due to lateral flow and transverse residual stresses. The develop- ment of a permanent groove by a rolling ball is worth further study.
Experimental studies of the physical breakdown of rolling surfaces by wear, scuffing and fatigue suggest that the origins of failure lie in local defects in the solids or lubricant such as non-metallic inclusions and surface irregularities, and at loads well below those to cause bulk plastic flow. It would appear valuable therefore to attempt to apply the theory of plasticity to study the local deformation and residual stresses at points of stress concentration.
Wear, g (1966) 4-19
II2 (IYLO) 151.
1,. liB~~1~L, I)le siwzge Liiswzg fiiv die vollmde Iieibzrxg, Miinchen, 1947. Il. I’o~rrsliY, Stresses and deflections of cylindrical bodies in contact etc., ,I. _IppZ. :Xlcc/l., ‘7
(1950) IYr. Ii. I.. JOHNSON, The effect of a tangential contact force upon the rolling motion of an elastic sphcrc, ,I. _4@Z. MEcA., 80 (‘958) 339. I’. J, L'ERXEULEPI: AND Ii. L. JOHKSOK, Contact of non-spherical elastic I1ot11cs transmitting tangential forces, ,/. _4ppZ. ,Wech., 86 (1904) 337. 1). J. HAINES AND E. OLLERTON, Contact stress distributions on elliptical contact surfacc,s subjcctctl to radial and tangential forces, Pvoc-. Ilsst. Aleck. Eugvs. (LonrloxJ, 177 (I 903) 95. 1). J. ~IAINES, Contact stresses in flat elliptical contact surfaces which support radial and shear- ing forces during rolling, presented at the Inst. of bIech. lingrs. lAubrication Convcntiorl. lAondon, May 19h5. J. J. IiALRER, Transmission of a force and couple bctlvccn two elastically similar rolling sphcrcs, lioziakl. Sed. .4 kad. Wetenschap., Pm-., SPY. H, 67 (1~64) 135. II. L. HEATHCOTE, The ball bearing, I?&. IZlcclz. EU~YS. (Imzdmj, l’lwc. :I lrtowzohilr li~il..
15 (1921) 509. 1. HALLING, Micro-slip between a rolling element and its track arising front geometric conforn- Ity and applied surface tractions, ,I. Mech. E?lg. Sot., 6 (1964) O+ 0. Luxx, Crunds&tzliches iiber stufcnlos vcrstellbarc Walzgctriebe, I<<~1l.~/~,l<ktio11, 7 (I 0,j.j)
330; ibid., 9 (1957) 169; ibid., IO (1958) 425. \c’. U'TERNITZ, \I’Blz-Bohrreibung-Bestimmung der Bohrmomente untl ~:mfangskrZftc bci liertz’scher l’ressung mit Punktberiihrung, Schviftenveihe A4ntriebstPrhuik, Hand 19, Fr. Vicwcg und Sohn, Hraunschweig, 1958. Ii. I,. JOHP~SON, Effect of spin upon the rolling motion of an elastic sphcrv on a plane, j. .,lppI. Mrclz., 80 (1958) 3.3’. I<. I,. JOHNSON, Influence of elastic deformation upon the motion of a ball rolling between t\\o surfaces, Pvor. Inst. Mech. E?p’s., 173 (1959) 795. A. IV. CROOK, Lubrication of Rollers, Parts I ~-IV, Phil. Tra?zs. lioy. SW. /_or?c~oiz, .%Y. .-I, 250 (1958) 357; ihid., 254 (1962) 223; ibid., 25.5 (1903) zS1. 1~. DOWSON, G. I<. HIGGIKSON AND 11. V. WHITAKBR, Elasto-hydrodynamic lubrication,
,I. Mrck. Iill,q. .%c., 4 (1962) 121. I). Dowso~ ,W’D :\. V. WHITAKER, Isothermal lubrication of cylinders, 12.S. I,.E. Lubrication (‘onf., Washington, 1904, .-1.S.L.E. Tvans., 8 (1965) 224. D. DOWSON. C. Ii. HIGGINSON AND L1. V. WHITAKER, Stress distribution inlubricatedrollingcon- tacts, Pm-. Sym~). Fatigue ie Rolling Contact, London, 1963, Inst. hlech. Engrs., London, 1904. H. S. CHENG AND H. STERIGLICHT, A numerical solution for the pressure. temperature and film thickness bctwecn rolling and sliding cylinders under heavy loads, 4.S.L.E. I Lubrication Conf.,
Washington, 1964, ,I. Basic Eng., Trans. z4.S.1M.B., Sev. U, 87 (1965) 695. H HT OK in E. MLY~F.K ANJJ B. STERNLICHT (eds.), I’roc. f?ztevx. Synap. ou f~uhrzccrtio?z n~cc/ W~uv, liozsstou, 1964, McCutchen Publ. Corp., ‘Bcrkelcy, 1905, pp. j (5’. \Y. I). h,IAI’, 1;. I,. MORRIS AND D. ATACK, Rolling friction of a hard cylintlrr over a viscoclastic material, ,/. _‘!ppl. P!zys., 30 (1959) 1713. 1). (;. FLOM AND A. M. HUECHE, Theory of rolling friction for spheres, ,/. :lppI. Plbys., JO (1959) 1725. J. .\. GREENWOOD, II. I\IIKSHAI.L AND D. TAHOR, Hysteresis losses in rolling and sliding friction, Pro<. lioy. SW., (Lmdm) , Ser. .-I, 259 (196 I) @o. S. C. HUNTER, TMling contact of a rigid cylinder with a viscoclastic half-sphere, ,I. _-lp$.
I>. W. MORLAND, .\ plane problem of rolling contact in linear viscoelasticity theory, ./. .I P@.
li. I>. JOIIXSON, ,\ shakedown limit m rolling contact, Pror-. 4th V.-S. j\‘atl. Co~gv. , Herkelry, 1962, .\m. Sot. Mech. I<ngrs., 1963.
THEORY OF ROLLING CONTACT STRESSES I9
32 K. L. JOHNSON AND J. A. JEFFERIS, Plastic flow and residual stresses, Proc. Symp. Fatigue in Rolling Contact, London, 1963~ Inst. Mech. Engrs., London, 1964.
33 A W. CROOK, Simulated gear-tooth contacts, Proc. Inst. Mech. Engrs. (London), r71(1957) 187. 34 G. M. HAMILTON, Plastic flow in rollers loaded above the yield point, Proc. Inst. Mech. Engrs.
(London), 177 (1963) 667. 35 J. E. MERWIN AND K. L. JOHNSON, An analysis of plastic deformation in rolling contact, Proc.
Inst. Mech. Engrs. (London), 177 (1963) 676. 36 K. L. JOHNSON, Correlation of theory and experiment in research on fatigue in rolling contact,
Proc. Symp. Fatigue in Rolling Contact, London, 1963, Inst. Mech. Engrs., London, 1964. 37 P. H. DAWSON, Effect of metallic contact on pitting of lubricated rolling surfaces, J. Mech.
Eng. Sot., # (1962) 16. 38 J. ARCHARD AND M. T. KIRK, Lubrication at point contacts, Pvoc. Roy. Sot. (London), Ser. A.,
261 (1961) 532.
Wear, 9 (1966) 4-19











![Subsurface Stresses in Rolling & Sliding Machine Components [Sadeghi, Sui; Int.comp.Eng.conf., 1988]](https://static.fdocuments.us/doc/165x107/577cd14b1a28ab9e7894160a/subsurface-stresses-in-rolling-sliding-machine-components-sadeghi-sui.jpg)






