A queuing model based on social attitudes - Conference on ... faculteit...Themodel: decisionprocess...
28
A queuing model based on social attitudes Conference on Traffic and Granular Flow ’15 Gerta Köster & Benedikt Zönnchen Department of Computer Science and Mathematics VADERE Crowd Simulation 28 th October 2015 1/22 Gerta Köster & Benedikt Zönnchen TGF 2015
Transcript of A queuing model based on social attitudes - Conference on ... faculteit...Themodel: decisionprocess...
-
A queuing model based on social attitudesConference on Traffic and Granular Flow ’15
Gerta Köster & Benedikt Zönnchen
Department of Computer Science and Mathematics
VADERE Crowd Simulation
28th October 2015
1/22 Gerta Köster & Benedikt Zönnchen TGF 2015
mailto:[email protected]
-
Table of contents
Introduction
The model
Simulation results
2/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
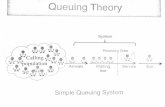
Queuing in the real world
Most people encounter queues as part of everyday live. Queues aresocial systems (Mann (1969)) influenced by
I physical constraints,I social norms & rules,I culture,I the goal,I type (self-organized or controlled),I . . .
å Different queuing patterns can be observed.
3/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The goal
The goal is to extend ideas from (Köster and Zönnchen (2014)):I Use different navigational floor fields to induce both, standing
in line and competition for the best spot.I Allow switching between floor fields to include queue jumping.
å Natural queuing patterns should emerge.
4/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
State of the art
Floor fields guide pedestrians around obstacles towards their targetalong
I the shortest path (Burstedde et al. (2001); Blue and Adler(2001)), or
I the quickest path (Kirik et al. (2009); Kretz (2009); Kretzet al. (2011); Hartmann et al. (2014)), or
I an occupied path which induces loose queueing (Köster andZönnchen (2014)).
5/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
State of the art
The floor field encodes T (~x),I the traveling time to the targetI of a wave front propagating from the target area Γ.
The wave front travels with traveling speed F (~x). T is computedby solving the eikonal equation
||∇T (~x)||= 1F (~x) , T (~x) = 0 if ~x ∈ Γ.
å Manipulate F to get different floor fields.
6/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model
We introduce two principles:I We use multiple floor fields to model different pedestrian
strategies.I We allow switching between strategies according to a simple
decision process.
7/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model
What do we want to model?I Pedestrians use one of two strategies.
I (a) Competitive: walk directly to the target.I (b) Cooperative: get in line.
I Pedestrians change their strategy during the simulation.
Pedestrians walk to the yellow target on the right. Cooperative pedestrians get in line,competitive pedestrians cut the line.
8/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model
What do we want to model?I Pedestrians use one of two strategies.
I (a) Competitive: walk directly to the target.I (b) Cooperative: get in line.
I Pedestrians change their strategy during the simulation.
Pedestrians walk to the yellow target on the right. Cooperative pedestrians get in line,competitive pedestrians cut the line.
8/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model
What do we want to model?I Pedestrians use one of two strategies.
I (a) Competitive: walk directly to the target.I (b) Cooperative: get in line.
I Pedestrians change their strategy during the simulation.
Pedestrians walk to the yellow target on the right. Cooperative pedestrians get in line,competitive pedestrians cut the line.
8/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model
Modeling of different pedestrian strategies.
9/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model: strategies and floor fields
Pedestrians navigate according to the floor field that correspondsto their current strategy.
Queuing with queue jumpers.
Floor field for competitive pedestrians. Floor field for cooperative pedestrians.
10/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model: strategies and floor fields
Competitive strategyPedestrians walk directly to the target.
11/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model: strategies and floor fields
Cooperative strategyPedestrians get in line.
12/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model
Modeling decision process.
13/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model: decision process
A pedestrian’s decision on whether to start or stop queue jumpingis influenced by:
I the time t a pedestrian has been using a certain strategy,(e.g. loosing patience, satisfied with new position)
I the absolute or relative queue position of a pedestrian,(‘Should I risk my position?’)
I the progress of the service point,I social norms,I the culture,I shared social identity (e.g. football fans waiting together.)I . . .
14/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
The model: decision process
We assume that the decision process is similar to a birth processwith a memory-less exponential distribution.
Let τ be the time a pedestrian p changes strategy. Then
P (τ ≤ t) =
1− exp(− 1µcomp · t
)if p is competitive
1− exp(− 1µcoop · t
)if p is cooperative,
The parameters µcomp and µcoop are the expected time a pedestriansticks to the competitive and the cooperative strategy respectively.
15/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Underlying models
Our algorithm is independent of the underlying locomotion model.
Here we useI Optimal Steps Model: Seitz and Köster (2012); von Sivers
and Köster (2013),I Gradient Navigation Model: Dietrich and Köster (2014).
16/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Simulation results: line cutting
Pedestrians spawn from the green areas and try to reach the yellowtarget on the right. Some pedestrians cut the line.
Medium level of patience: µcomp → ∞,µcoop = 300s
Low level of patience: µcomp → ∞,µcoop = 100s
17/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Simulation results: queue jumping
Pedestrians spawn from the green areas and try to reach the yellowtarget on the right. Some pedestrians start queue jumping and getback in line after a short time.
Short queue jumps: µcomp = 2s,µcoop = 100s
Longer queue jumps: µcomp = 20s,µcoop = 100s
18/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Conclusion and future work
ConclusionFloor fields in combination with a simple decision process can beused to induce a variety of natural looking queues in pedestrianmotion models.
Future workWe have to find heuristics based on findings from psychology thatrealistically model the decision process.
19/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Blue, V. J. and Adler, J. L. (2001). Cellular automata microsimulation for modeling bi-directional pedestrianwalkways. Transportation Research Part B: Methodological, 35:293–312.
Burstedde, C., Klauck, K., Schadschneider, A., and Zittartz, J. (2001). Simulation of pedestrian dynamics using atwo-dimensional cellular automaton. Physica A: Statistical Mechanics and its Applications, 295:507–525.
Dietrich, F. and Köster, G. (2014). Gradient navigation model for pedestrian dynamics. Physical Review E,89(6):062801.
Hartmann, D., Mille, J., Pfaffinger, A., and Royer, C. (2014). Dynamic medium scale navigation using dynamicfloor fields. In Weidmann, U., Kirsch, U., and Schreckenberg, M., editors, Pedestrian and Evacuation Dynamics2012, pages 1237–1249. Springer.
Kirik, E. S., Yurgelyan, T. B., and Krouglov, D. V. (2009). The shortest time and/or the shortest path strategies ina CA FF pedestrian dynamics model. Mathematics and Physics, 2(3):271–278.
Köster, G. and Zönnchen, B. (2014). Queuing at bottlenecks using a dynamic floor field for navigation. In TheConference in Pedestrian and Evacuation Dynamics 2014, Transportation Research Procedia, pages 344–352,Delft, The Netherlands.
Kretz, T. (2009). Pedestrian traffic: on the quickest path. Journal of Statistical Mechanics: Theory andExperiment, 2009(03):P03012.
Kretz, T., Große, A., Hengst, S., Kautzsch, L., Pohlmann, A., and Vortisch, P. (2011). Quickest paths insimulations of pedestrians. Advances in Complex Systems, 10:733–759.
Mann, L. (1969). Queue culture: The waiting line as a social system. American Journal of Sociology,75(3):340–354.
Seitz, M. J. and Köster, G. (2012). Natural discretization of pedestrian movement in continuous space. PhysicalReview E, 86(4):046108.
von Sivers, I. and Köster, G. (2013). Realistic stride length adaptation in the optimal steps model. In Traffic andGranular Flow’13, Jülich, Germany.
20/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Questions?
Image created by Benedikt Zönnchen
VADERE soon to be open source!
21/22 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Add influencing properties (Example)
Let T (~x) the travelling time of the propagating wave starting atthe queue tail and stopping at the border of the queue. Let further
Tmax = max~xT (~x).
Replace µb byµb ·
TmaxT (~x) ,
where ~x is the current position of the pedestrian.
1/5 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Decision process algorithm
Algorithm 1: Decision process algorithm.Data: random generator random
1 for i← 0 to n do2 ∆t← ti+1− ti;3 for all pedestrians p do4 if p is cooperative and
random.next()< exp((−1/µcoop) ·∆t) then5 change the strategy of p to competitive6 else if p is competitive and
random.next()< exp((−1/µcomp) ·∆t) then7 change the strategy of p to cooperative8
2/5 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Tail detection algorithm
Algorithm 2: Queue tail detection algorithm.Data: r > 0Result: target polygon Γ⊂ Ω with ∀q ∈ Γ : ||p− q||< r
1 calculate the pedestrian density ρped(~x) ∀~x ∈ Ω;2 mark each position ~x with ρped(~x)< � as unreachable (� > 0);3 solve the eikonal equation by starting the propagating wave fromthe target of interest, with F = 1;
4 sort the list L⊂ Ω of reachable position according to descendingtravelling time;
5 p← L.pop() (remove the point with the highest travelling timeform the sorted list);
6 P.add(p) (add the point to the set of points);7 while L is not empty and ||p−L.peak()||< r do8 P.add(L.pop())9 return Γ, the convex hull of P ;
3/5 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Travelling speed functions
Each floor field corresponds to a specific travelling speed functionF :
Fcoop(~x) =1
1−min(cqueue ·ρbped(~x),1− �
)+ cob ·ρob(~x)
, (1)
Faggr(~x) =1
1 + cob ·ρob(~x)(2)
where (1− �), cqueue, cob ≥ 0, ρob(~x) is the obstacle density (seeKöster and Zönnchen (2014)) and ρcoopped (~x) is the pedestriandensity of pedestrians using the cooperative strategy.
4/5 Gerta Köster & Benedikt Zönnchen TGF 2015
-
Equations
ρped(~z) = Sped ·∑
~x∈Ped
[ρpartialped (~x,~z)
](3)
ρpartialped (~x,~z) =1
2πR2 exp(− 12R2 ||~x−~z||
2)
(4)
ρob(z) =m∑i=1
∫Oi
[ 12πR2 exp
(− 12R2 ||~x−~z||
2)]dx (5)
5/5 Gerta Köster & Benedikt Zönnchen TGF 2015
IntroductionThe modelSimulation resultsAppendix