A PLC-based modified-fuzzy controller for PWM-driven...
19
A PLC-based modified-fuzzy controller for PWM-driven induction motor drive with constant V/Hz ratio control Nordin Saad n , M. Arrofiq Department of Electrical and Electronic Engineering, Universiti Teknologi PETRONAS, Bandar Sri Iskandar, 31750 Tronoh, Perak, Malaysia article info Article history: Received 30 July 2009 Received in revised form 7 July 2011 Accepted 12 July 2011 Available online 24 August 2011 Keywords: Fuzzy logic control PID control Programmable logic controller Induction motor drive Constant volt–hertz ratio PWM inverter abstract In this paper, a method to develop and design a fuzzy-hybrid control on an industrial controller to control speed of an induction motor and implementing a constant V/Hz ratio control is presented. Detailed discussions on the controller for a PWM-driven induction motor drive system, the system identification for the model transfer function, and the analysis on output responses and the associated manipulated variables are presented. The control objective is to provide an effective control action to sudden changes in reference speed and/or load torque. A switching type controller consisting of two control modes are devised: a PID-type fuzzy controller consisting of a PI-type and a PD-type fuzzy controller, and a conventional PID. At the early phase of the control action, the control task is handled by the PID-type fuzzy controller. At a later phase when the absolute of error is less than a threshold value, the input of integrator at the output side is no longer given by fuzzy action but fed by the incremental PID action. In term of control action, this is an enhanced proportional and derivative action when the actual value is closed to reference. Detailed evaluations of the controller’s performance based on pre-defined performance indices under several conditions are presented. The findings demonstrate the ability of the control approach to provide a viable control solution in response to the different operating conditions and requirements. & 2011 Elsevier Ltd. All rights reserved. 1. Introduction Motor drives are used in a very wide power range. In adjustable- speed drive applications the ranges of speed achievable is very important in applications such as controlling of a boiler feed-water pump. In all drives where the speed and position are controlled, a power electronic converter is needed as an interface between the input power and the motor. A controller is also needed to make the motor, through the power electronic converter, meet the drive requirements. Notably, the extensive automation in modern indus- tries demand several strategies that have high reliability and robust to be introduced and one of the main requirements is the control technique used. The controller used in this work is a programmable logic controller (PLC) that proves to be very efficient and reliable in applications involving sequential control and the synchronization of processes and auxiliary elements in the manufacturing, chemical and process industries [1]. The availability of PLC with basic features like arithmetic operations and the improvement of graphical user inter- face (GUI) in programming and communication, promises the means to utilize the advantages of PLC in adjustable speed application [2]. Successful examples of utilizing PLCs in control as main controller are related in [3–9], while as an assistant device control is related in [10]. The application of PLC in industry as a monitoring and controlling a system with multi-tasking have been reported in [11–14]. The proportional, integral and derivative (PID) is by far the most dominating form of feedback in use today and is used in wide range of problems, see [15]. It is able to eliminate steady state error, which is implemented by the integral component and able to anticipate for the future that is operated by the derivative component [16]. The two types of tuning methods for this control are the classical and modern tuning methods, where the classical method is based on the experiment response while the modern method relies on process model. In real application, model of the process is usually quite complex, ill-define and sometimes it is not easy to produce. Therefore, the modern tuning method is more suitable when the process model is known. Fuzzy logic has been widely implemented in several areas such as in house hold appliances, transportation, etc. Fuzzy logic is suitable for control- ling a system that has a complicated process model [17,18]. Designing of fuzzy logics, membership function and rules are usually subjective and no standard method in designing the input output gains [19]. Usually the fuzzy designers utilize the expert or experience of the human operation information. Several efforts have been put to improve the controller performance including fuzzy logic. In relation to fuzzy logic, it Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/rcim Robotics and Computer-Integrated Manufacturing 0736-5845/$ - see front matter & 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.rcim.2011.07.001 n Corresponding author. Tel.: þ605 368 7835; fax: þ605 365 7443. E-mail addresses: [email protected] (N. Saad), rofi[email protected] (M. Arrofiq). Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112
Transcript of A PLC-based modified-fuzzy controller for PWM-driven...

Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112
Contents lists available at ScienceDirect
Robotics and Computer-Integrated Manufacturing
0736-58
doi:10.1
n Corr
E-m
rofiq@u
journal homepage: www.elsevier.com/locate/rcim
A PLC-based modified-fuzzy controller for PWM-driven induction motordrive with constant V/Hz ratio control
Nordin Saad n, M. Arrofiq
Department of Electrical and Electronic Engineering, Universiti Teknologi PETRONAS, Bandar Sri Iskandar, 31750 Tronoh, Perak, Malaysia
a r t i c l e i n f o
Article history:
Received 30 July 2009
Received in revised form
7 July 2011
Accepted 12 July 2011Available online 24 August 2011
Keywords:
Fuzzy logic control
PID control
Programmable logic controller
Induction motor drive
Constant volt–hertz ratio
PWM inverter
45/$ - see front matter & 2011 Elsevier Ltd. A
016/j.rcim.2011.07.001
esponding author. Tel.: þ605 368 7835; fax:
ail addresses: [email protected] (N. S
gm.ac.id (M. Arrofiq).
a b s t r a c t
In this paper, a method to develop and design a fuzzy-hybrid control on an industrial controller to
control speed of an induction motor and implementing a constant V/Hz ratio control is presented.
Detailed discussions on the controller for a PWM-driven induction motor drive system, the system
identification for the model transfer function, and the analysis on output responses and the associated
manipulated variables are presented. The control objective is to provide an effective control action to
sudden changes in reference speed and/or load torque. A switching type controller consisting of two
control modes are devised: a PID-type fuzzy controller consisting of a PI-type and a PD-type fuzzy
controller, and a conventional PID. At the early phase of the control action, the control task is handled
by the PID-type fuzzy controller. At a later phase when the absolute of error is less than a threshold
value, the input of integrator at the output side is no longer given by fuzzy action but fed by the
incremental PID action. In term of control action, this is an enhanced proportional and derivative action
when the actual value is closed to reference. Detailed evaluations of the controller’s performance based
on pre-defined performance indices under several conditions are presented. The findings demonstrate
the ability of the control approach to provide a viable control solution in response to the different
operating conditions and requirements.
& 2011 Elsevier Ltd. All rights reserved.
1. Introduction
Motor drives are used in a very wide power range. In adjustable-speed drive applications the ranges of speed achievable is veryimportant in applications such as controlling of a boiler feed-waterpump. In all drives where the speed and position are controlled, apower electronic converter is needed as an interface between theinput power and the motor. A controller is also needed to make themotor, through the power electronic converter, meet the driverequirements. Notably, the extensive automation in modern indus-tries demand several strategies that have high reliability and robust tobe introduced and one of the main requirements is the controltechnique used. The controller used in this work is a programmablelogic controller (PLC) that proves to be very efficient and reliable inapplications involving sequential control and the synchronization ofprocesses and auxiliary elements in the manufacturing, chemical andprocess industries [1]. The availability of PLC with basic features likearithmetic operations and the improvement of graphical user inter-face (GUI) in programming and communication, promises the meansto utilize the advantages of PLC in adjustable speed application [2].
ll rights reserved.
þ605 365 7443.
aad),
Successful examples of utilizing PLCs in control as main controller arerelated in [3–9], while as an assistant device control is related in [10].The application of PLC in industry as a monitoring and controlling asystem with multi-tasking have been reported in [11–14].
The proportional, integral and derivative (PID) is by far themost dominating form of feedback in use today and is used inwide range of problems, see [15]. It is able to eliminate steadystate error, which is implemented by the integral component andable to anticipate for the future that is operated by the derivativecomponent [16]. The two types of tuning methods for this controlare the classical and modern tuning methods, where the classicalmethod is based on the experiment response while the modernmethod relies on process model. In real application, model of theprocess is usually quite complex, ill-define and sometimes it isnot easy to produce. Therefore, the modern tuning method ismore suitable when the process model is known. Fuzzy logic hasbeen widely implemented in several areas such as in house holdappliances, transportation, etc. Fuzzy logic is suitable for control-ling a system that has a complicated process model [17,18].Designing of fuzzy logics, membership function and rules areusually subjective and no standard method in designing the inputoutput gains [19]. Usually the fuzzy designers utilize the expert orexperience of the human operation information.
Several efforts have been put to improve the controllerperformance including fuzzy logic. In relation to fuzzy logic, it

PersonalComputer
PLC-basedControllerHMI PWM
Inverter
Forward/Reverse
Contactor
3-Phase PowerSupply
MCB
3-PhaseInduction Motor
Dynamometer/Load
VControl
VLoad
VSpeed
DirectionFWD:’1'REV:’0'
Comm.signal
Comm.signal
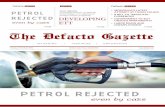
Fig. 1. Physical system layout with HMI, PLC, PWM inverter, induction motor
and load.
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–11296
can be seen as a PI, PD or PID controller in which the decisionwould be made by fuzzy algorithm. Hence, most of the improve-ment works are on tuning the parameter of the P, I or D eitherindividually or simultaneously. Several previous work on improv-ing the fuzzy logic controllers can be found in [8,19–25]. Li et al. [10]considered the problem of developing the input–output gainscheduling to improve the control resolution. An alternativeway to increase the resolution of fuzzy controller on PLC hasbeen conducted. Chung et al. [19] attempted to tune all threescaling factors using a single input fuzzy controller. There arequite a number of reports on tuning the change of error input gainand output gain based on peak observer, mathematical functiondriven by error and rate of error, respectively. These includeKarasakal et al. [8], Qiao and Mizumoto [24] and Woo et al. [25].
There are quite a number of reports on the hybrid fuzzy-PIDcontroller. These includes Mudi and Pal [22,23] and Guzelkayaet al. [20]. More specifically, Mudi and Pal [22,23] developed anapproach to tune a PI and PD-type fuzzy controllers to outputgain. In the design, an extra fuzzy logic controller performs as acontroller to tune the output gain. A second fuzzy controller, withquite complex rules, is used to tune the output scaling factor andutilized the same input as main fuzzy controller i.e. error andchange in error values. The proposed rules of the fuzzy parametertuner were also able to provide self-tuning and anti-windupmechanism. Karasakal et al. [21], proposed a self-tuning forPID-fuzzy controller. A second fuzzy controller is employed toperform the self-tuning, and was based on the information of errorand relative rate of error. A relative rate observer was utilized toindicate whether the system response was fast or slow. Based onthat condition, the developed rules determined the scaling factorfor the change in error input gain and PI-fuzzy output gain.Basically the proposed method tries to tune the I and D fuzzy-parameters keeping proportional parameter fixed, but it provides again to change the proportional parameter as well.
In addition to the above, there were a few reported works onattempting to improving fuzzy controller using PLC. For example,[8,21] discussed the implementation of gain scheduling andtuning with relative rate observer. A comparative analysis of PIand Fuzzy controllers was presented in [26]. It was a compre-hensive comparison in a different situation including suddenchange in reference and load. It was accounted that in someconditions fuzzy logic has better performance than PI, and viceversa. It was shown that for a large change in reference, fuzzycontrolled gives faster response than a conventional controlled.In relation to insufficient resolution of fuzzy inference, thetheoretical study shows that an inferior performance of fuzzycontrolled process around a reference point is expected [10].In real implementation, it can be caused by either the truncatingprocess, rounding process or less word length.
Notably, there is substantial literature on control using hybrid-fuzzy controllers; however, there is only a few literature oninduction motor speed control fed by variable-voltage variable-frequency (VVVF) using hybrid-fuzzy controller, examples in[12,13,27]. This work is similar to [12,13], but unique in termsof the controller used, i.e., a hybrid fuzzy-PID, and the controltechnique approached, i.e., VVVF with constant V/Hz ratio.
This paper’s contribution is as follows: a design of a fuzzycontrol algorithm for a PLC-based fuzzy controller for an induc-tion motor speed control (adjustable speed drive) at constantV/Hz ratio with the PLC-based fuzzy controller interfaced to themotor via a pulse-width-modulation (PWM) inverter.
The paper is organized as follows: Section 2 discusses thesystem layout of PLC-based fuzzy controller for PWM-driveninduction motor drive. Section 3 summarizes the design of theproposed modified-fuzzy controller. Illustrative example on thesystem identification for the model transfer function is presented
in Section 4. Section 5 discusses on the controller design and theimplementation in PLC. The experimental results are presented inSection 6, while Section 7 gives the conclusion of this paper.
2. The system layout of PLC-based fuzzy controller
The plant consists of a PWM inverter, an induction motor anda load. The PWM inverter functions as an interface between thePLC and the induction motor. The personal computer (PC) acts asa terminal for developing and downloading the program includ-ing the fuzzy logic routines to PLC and human–machine-interface(HMI) design to HMI. The connection between PC and PLC isestablished via Ethernet TCP/IP. The system also has a forward/reverse contactor to accommodate bidirectional rotation for themotor. The physical system layout and the related electricalconnection of the test rig is illustrated in Fig. 1.
The PLC is equipped with a digital input–output and an analoginput–output module. The rated input voltage of the digital inputis 24 V DC while for the digital output is 12–24 V DC. To controlthe low voltage forward/reverse relay contactors running at lowvoltage (24 V) that drive the magnetic contactors two digitaloutput points are used. One channel of analog input and twochannels of analog output are used where the input channel is tomeasure the analog voltage that represents the actual speed whileone of the two analog outputs is to send the manipulated variable(u) to the variable speed drive and the other is to specify the loadapplied to the induction motor.
The PWM inverter constitutes the main component of avariable speed drive (VSD). The VSD requires a three-phase supplyon its line side and produces sequences of three-phase PWM onits output side, and this is arranged to drive the 3-phase squirrelcage 240/115, 50 Hz, 175 W and 1395 rpm induction motor. TheVSD is rated at 0.75 kW, 415 V line-to-line on its output load sideand its frequency is controlled by a 0–10 V analog signal comingfrom the analog output module of the PLC. There is a linearrelation between 0 and 10 V of analog signal to the PWM inverterand 0–50 Hz analog output from PWM inverter to the three phaseinduction motor. The modulation implemented on the PWMinverter is a sine pulse-width-modulation (PWM) that runs on

N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 97
a carrier frequency of 7.5 kHz and operates on a constant V/Hzratio control. The PLC-based controller, as being interfaced to aninduction motor via the PWM inverter provides a signal to thePWM inverter that depends on the inter-related variables i.e., theerror and the rate of change in the error of the actual speed andthe desired speed, the fuzzy rules, and the speed and torquerequirements. Since, the PWM inverter operates on a constantV/Hz ratio control, the output of the PWM inverter in the form ofvoltage and frequency supplied to the induction-motor stator,depends on the controller’s output signal to the PWM inverterand the V/Hz ratio relationship.
The programmable terminal (PT) consisting of a liquid crystaldisplay (LCD) and a touch panel provides user friendly HMIinterfacing between system and operator. In order to acquire aparticular mechanical load, an analog control voltage is adjustedto provide a voltage that is proportional to the speed as to beprovided by a dynamometer. The dynamometer consists of apermanent-magnet direct current (DC) machine that operates as agenerator and is mechanically coupled to the motor by a timingbelt. The analog voltage is related to the speed at 500 rpm/V,and the voltage is then fed to the PLC as the measured processvariable.
3. Modified PID-type fuzzy controller
A common PID-type fuzzy controller is depicted in Fig. 3. Theanalysis of a linear PID-type fuzzy controller was presented in[24]. The controller is a combination of PI-type and PD-typecontrollers. The PI-type is recognized to reduce steady-state errorbut yields penalized rise time and settling time. The PD-type leadsto fast rise time and minimum peak overshoot but does notimprove steady-state error. As illustrated in Fig. 2, the output (uc)is fed by integrator output (u1) and gain (u2). The integratoroutput represents the PI-type fuzzy controller and gain (u2)
FuzzyController
U ucK
e E
e EK
u1
u2
Fig. 2. General scheme of a PID-type fuzzy controller.
Fig. 3. Structure of the modifi
provides PD-type fuzzy controller. Eqs. (1) and (2) represent thecorresponding PI-type and PD-type fuzzy controller output equa-tions, respectively. The combination of Eqs. (1) and (2) formsthe PID-type fuzzy controller output as in Eq. (3). In Eqs. (1), (2)and (3), A, P and D are the fuzzy parameters that relate to theinput–output membership functions while a, b are the outputgains. K1 and K2 are the error input and change in error inputgains, respectively.
u1 ¼ aAþaPK1eþaDK2 _e ð1Þ
u2 ¼ bAtþbK2DeþbK1P
Zedt ð2Þ
uc ¼ u1þu2 ¼ aAþbAtþðaK1PþbK2DÞeþbK1P
ZedtþaK2D _e ð3Þ
where
P¼uðiþ1Þj�uij
eiþ1�ei
D¼uiðjþ1Þ�uij
_ejþ1� _ej
A¼ uij�Pei�D _ej
i,j¼ fuzzy subset
u¼ rule output
The proposed controller is simply the combination of the twocontrollers: PID-fuzzy and the conventional PID. This concept isinvestigated in this work by developing a switching type con-troller for a drive system, where a PID-type fuzzy is executed firstand then switched to an incremental PID. The expression of theincremental output for conventional PID is as Eq. (4). Here Dt, Ti
and Td are the sampling period, integral time and derivative time,respectively. The improvement is realized by replacing the accu-mulator of the PLC with the incremental PID and this happens atthe time n¼k, where 9e(n)9othreshold error (eth), that corre-sponds to 50 rpm. The structure of the proposed method is shownin Fig. 3. When the condition is satisfied, the controller derivesthe command signal to the PWM that is represented mathema-tically as Eq. (5). If it is not satisfied then the controller output isrepresented mathematically as Eq. (3). The flowchart of thedecision process develop towards control action is illustrated
ed-fuzzy logic controller.

Fig. 4. Decision process develops towards control action.
PWMinverter
InductionMotor
Dynamometer(load)
vi ld
n
nv,f
Fig. 5. Structure of the variable speed drive (VSD).
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–11298
in Fig. 4.
DucðnÞ ¼ Kp eðnÞ 1þDt
Tiþ
Td
Dt
� ��eðn�1Þ 1þ2
Td
Dt
� �þeðn�2Þ
Td
Dt
� �ð4Þ
The proposed controller has the proportional and derivativevalues higher than a PID-type fuzzy controller. It is expected thatthe system would be able to reach the steady state faster becauseof the higher proportional action, and also to minimize the steadystate error due to the contribution of the integral and derivativeactions. For clarity, the proposed controller that consists of thehybrid of a conventional PID and a PID-type fuzzy controllers willbe referred to as ‘modified FLC’, while the PID-type fuzzycontroller will be designated as ‘FLC’.
uc ¼ u1þu2 ¼ aAðnÞþaPðnÞK1eðnÞþaDðnÞK2ðnÞ _eðnÞ
þXk�1
n ¼ 1
bAðnÞþbPðnÞK1eðnÞþbDðnÞK2 _eðnÞ
þKp
X1n ¼ k
eðnÞ 1þDt
Tiþ
Td
Dt
� ��eðn�1Þ 1þ2
Td
Dt
� �þeðn�2Þ
Td
Dt
� �
ð5Þ
4. Model structures
The process considered here is an integration of a PWMinverter, an induction motor and a dynamometer that form aVSD, as shown in Fig. 5. The process has two inputs and oneoutput. The voltage to the PWM inverter, vi, is a signal thatcontrols the frequency, f, and voltage output, v, while the inputvoltage to the dynamometer is the signal, ld, that specifies the
load applied to the induction motor. The process output is themotor speed, n.
The procedures as outlined in [28–30] were used to developthe model from experimental input–output data i.e. input outputdata, choice of model structure, estimation of the model para-meter and validation.
4.1. Input output data
An open loop experiment is conducted on the integrated VSDsystem consisting of PWM inverter, induction motor and dynam-ometer (or load) to determine the minimum and maximumVSD input data. The minimum and maximum VSD input data isthe data that correspond to minimum and maximum speed asspecified in the operating point. The minimum and maximuminput values are 700 and 1900 steps, and following the V/Hzconstant rate, this corresponds to PWM inverter output frequencyof 17.5 and 47.5 Hz, respectively.
Using multilevel periodic perturbation signal as the input togenerate the output data, similar to the method as proposed in[31], seven sets of pseudo-random data were generated. The inputdata repetition rate is 3 s and the number of sequence is 15, withthe period of input data equals 45 s. The experimental output datafor each input consists of 4500 sampled data.
The input i.e., speed and load requirement, are sent to PWMinverter and load, respectively, and the induction motor speed isrecorded. The similar experiment is conducted using differentdata sets to ensure that if it can give the best overall fit value forthe different data sets, the model will be a good representation ofthe system.
Example of the open loop experiment results (speed in rpm)for the VSD model under multilevel periodic perturbation signalsis shown as in the lower plot of Fig. 6.
4.2. Selection of model structure
The candidates for the model structure are the process model,state space (N4S2), Box–Jenkins (BJ), ARMA, ARMAX and OutputError (OE). The evaluation of model structure is based on the fitvalue that indicates the percentage of the output variation betweenthe model output (simulated) and the measured output [32].

Table 1Fit value for several model structures for four different data set in
descending order.
(a) Identification I (b) Identification II
Model Fit (%) Model Fit(%) Model Fit (%) Model Fit (%)
P3DZU 90.64 ARX 87.79 P3DIZU 88.57 ARX 86.4
P3DZ 88.86 AMX 85.83 BJ 88.51 AMX 85.63
P1DZ 88.45 P3DIZ 78.42 OE 88.36 P1D 85.51
N4S2 88.23 P3DIZU 72.82 P3DZ 88.31 P1DZ 85.25
BJ 88.16 P1D 70.91 P3DZU 88.18 P3DIZ 74.45
OE221 88.15 P1DIZ 70.27 N4S2 86.45 P1DIZ 73.66
(c) Identification III (d) Identification IV
P1DIZ 90.77 BJ 87.83 P3DZ 89.31 N4S2 86.21
P3DZ 90.1 OE 87.82 P3DZU 89.26 P1D 86.13
P3DZU 90.05 P1DZ 87.54 P1DIZ 88.78 P1DZ 85.31
ARX 88.14 AMX 85.13 BJ 86.99 AMX 83.93
P1D 88.06 P3DIZ 74.93 OE 86.72 P3DIZU 69.59
N4S2 87.93 P3D 65.52 ARX 86.66 P3DIZ 69.31
Table 2Parameters of P3DZ model.
Process K Tp1 Tp2 Tp3 Td Tz
G_1(s) 0.72527 326.38 0.090062 0.10037 0.069926 351.21
G_2(s) �0.12728 13.85 0.03672 0.038175 0.025044 13.363
Fig. 7. Plots for P3DZ, comparisons between the experiment, P3DZ model without
offset, and P3DZ with offset.
Fig. 6. Input–output data for identification I. The upper plot is the VSD input
signal, the middle plot is the load applied, and the lower plot is the speed
response.
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 99
The detail of fit value equation is expressed in Eq. (6) where y,_yand y
,are the experimental output data, simulated model output
data and mean of experimental output data, respectively. Thehigher fit value implies that the difference of simulated modeldata as compared to experimental data is small. The maximum fitvalue is 100%.
Fit¼ 1�normðy�_yÞ
normðy�y,Þ
" #100% ð6Þ
The first four different input–output data sets named asidentification I, II, III and IV are used to produce a basic modelstructure that will later be refined. Table 1 summarizes thecombination of data to be identified.
The process model has been named as follows. The firstparameter is P that indicates pole. The number of pole or poles is
indicated by the number after P. The second parameter is delay (D).The existence of integration, if any, is indicated by the letter I as athird parameter. The fourth parameter indicates zero (Z). The lastparameter ‘U’ to indicate the process is under-damped, if any.
4.3. Estimation of model parameter
The selected model structure, P3DZ, has three poles and asingle zero with dead time process model. The model expressionis as in Eq. (7) and the parameters given by identification processare summarized in Table 2.
YðsÞ ¼ G_1ðsÞþG_2ðsÞ ð7Þ
where
G_1ðsÞ ¼ K1þTzs
ð1þTp1sÞð1þTp2sÞð1þTp3sÞeð�TdsÞ
G_2ðsÞ ¼ K1þTzs
ð1þTp1sÞð1þTp2sÞð1þTp3sÞeð�TdsÞ
It is clearly shown in Fig. 7 that the simulated model outputhas an offset error as indicated in the plot for Model P3DZ. Hence,an offset is introduced in the model’s transfer function to increasethe fit value, by shifting the simulated output data so as to reducethe offset error, see plot for Model P3DZþoffset. A single valueoffset is required in the final model. The averaging process indetermining the offset is selected to represent the required offsetto the final model.
The model in continuous time is expressed as in Eq. (8).
YðsÞ ¼ G_1ðsÞþG_2ðsÞþoffset ð8Þ
where
G_1ðsÞ ¼ 0:72527�1þ351:21s
ð1þ326:38sÞð1þ0:090062sÞð1þ0:10037sÞe�0:069926s
G_2ðsÞ ¼ 0:12728�1þ13:363s
ð1þ13:85sÞð1þ0:03672sÞð1þ0:038175sÞe�0:025044s
offset¼�53.86.

N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112100
Consequently, the model in discrete-time representation canbe written as in Eq. (9).
YðzÞ ¼ G_1ðzÞþG_2ðzÞþoffset ð9Þ
where
G_1ðzÞ ¼ z�6 2:357e�7z3þ0:004082z2�0:000387z�0:003695
z4�2:8z3þ2:61z2�0:81z
G_2ðzÞ ¼ z�2�0:0009853z3�0:004062z2þ0:004328zþ0:0007145
z4�2:53z3þ2:116z2�0:5857z
offset¼�53.86.
More detailed discussion on the system identification to obtainthe model’s transfer function can be found in [33,35].
4.4. Model validation
Simulations were conducted to observe the effect of increasingand decreasing the input speed requirements on the outputspeed. The results show that the output follows the input withsome delay, which is as expected. Simulations were also made toobserve the effect of applying and releasing load on the speed ofthe induction motor. It shows that applying load to the systemreduces the speed and vice versa. The results of the validationexercise are comparable to the available knowledge about theactual system.
5. Controller design
As to ascertain the correctness of the controller parametervalues during real-time implementation on the test prototype, asimulation model of the system consisting of the PWM inverter,induction motor and dynamometer is built on MATLAB/Simulinkusing empirical data via system identification technique. Detailanalyses of several realistic situations are simulated and theresults, i.e., control parameters can then be used on the testprototype. The model developed in Section 4 is used in thecontroller analysis to obtain a proper setting of the controllerparameter. As depicted in Fig. 8, the system consists of a fuzzycontroller block, an incremental PID-control block, a low passfilter block and the process model block. The first three blocksconstitute the components that represent the PLC. Thus duringsimulation run, the system would simulate the functions as in thePLC. The implementation of fuzzy logic in the PLC does not useany dedicated fuzzy module. By implementing using basic arith-metic and logic unit, and having the mathematical operations oninteger numbers the computation task time and the usage of
Fig. 8. Simulation model in Matlab/Simulink for the dete
memory would be reduced. In a similar way, the variable speeddrive also receives integer input number.
5.1. Fuzzy logic controller membership functions
The fuzzy controller used is a crisp type fuzzy controller andthe inference method implemented is the product-sum. The fuzzycontroller parameters are expressed in input–output membershipfunction as shown in Fig. 13. The input to the fuzzy controller iserror and the range of its value is based on the operating points.Since the maximum speed of operating value is 1200 rpm, hencethe range of error is from �1200 to 1200 rpm. The membershipfunction of the error is determined by the control action scenario.The scenario implemented is to give different action when theerror is deviating quite far from reference, when moderately farand when closed to the reference. This membership functiondivides the error span into four areas for positive and negativeparts. Due to these scenarios, the number of membership func-tions for the error input is seven as illustrated in Fig. 13(a), i.e.negative big (NB), negative medium (NM), negative small (NS),zero (ZE), positive small (PS), positive medium (PM) and positivebig (PB). In principle any membership function forms could beimplemented in PLC, but the constraint would be on the memoryspace. In this work, the membership function forms utilized aretriangle and trapezoid. This selection is based on the desire tohave simplicity in computation.
Designing the membership functions for the change in error isanother important task. The data to be used in the design isobtained experimentally. A series of experiments were conductedto analyze when a step input is applied to the system, subjectedto different speed and load requirements. The response providesan important value on the range of the speed and the respectivevalues of the change in error can then be determined. Figs. 9and 10 depict the step response of the system at 600 and1200 rpm simultaneously, at no load and 2 Nm load.
When the reference speed is 600 rpm, the minimum change oferror at no load and at 2 Nm load are �30 and �23 rpm, while for1200 rpm, these are �45 and �30 rpm. Considering the valuesthat can be applicable to both speeds, �30 is chosen as for thechange in error. The value is determined by analyzing the trend ofcurrent speed. If the current speed is increasing, the change inerror is negative and vice versa.
Another set of experiments were conducted to observe theresponse when applying and releasing a load. Figs. 11 and 12depict the change in error value when load of 1 and 2 Nm isapplied and released at 600 and 1200 rpm, simultaneously. Theload is applied at 3 s then released at 6 s. From Figs. 11 and 12 theminimum and maximum of change in error for 600 rpm is �25
rmination of control signals and parameters for PLC.

Fig. 9. Simulation of the dynamic motor speed and change in error for a speed with step input of 600 rpm. (a) At no load and (b) with 2 Nm load applied.
Fig. 10. Simulation of the dynamic motor speed and change in error for a speed with step input of 1200 rpm. (a) At no load and (b) with 2 Nm load applied.
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 101
and 20 rpm while for 1200 rpm �20 and 20 simultaneously. Thevalue of 20 is chosen for the change in error since it is relevant forboth speeds.
Similar experiments were conducted to obtain the change inerror values and these produce five membership functions asfollows: negative big (NB), negative small (NS), zero (NS), positive
small (PS) and positive big (PB) and it is illustrated in Fig. 14. Thevalues for the change in error of the membership functions areillustrated in Fig. 13(b).
The membership function of the fuzzy output depends on thecontrol action scenario in determining the error membershipfunction. For this particular case, the output membership function

Fig. 11. Simulation of the dynamic motor speed and change in error for sudden
rises and sudden falls in speed with step input speed of 600 rpm and 2 Nm load.
Fig. 12. Simulation of the dynamic motor speed and change in error for sudden
rises and sudden falls in speed with step input speed of 1200 rpm and 2 Nm load.
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112102
consists of seven members in singleton form namely negative big(NB), negative medium (NM), negative small (NS), zero (ZE),positive small (PS), positive medium (PM) and positive big (PB).This is illustrated in Fig. 13(c). Using singleton membershipfunction, defuzzification process can be evaluated quickly andthus reduces the time consuming tasks. Centroid method is usedin the defuzzification process since it can provide superior controlperformance. As depicted in Fig. 13, the universe of discourse forthe inputs and outputs are defined in the interval [�1 1]. For themembership of inputs, the scaling factors are defined as follows:for the input gain, K1 (with respect to the error input)¼1/750, and
for the input gain K2 (with respect to change in error input)¼1/30.The output frequency as shown in Fig. 13(c) defines the particularfrequency in Hz to be applied onto the PWM inverter, as theoutcome of the fuzzy rule as inferred in Table 3.
Fig. 14 shows the system responses to guide in generating thefuzzy rules. It is based on the situation of the actual values ascompared to reference. At the lower part of Fig. 14, a tableindicates the sign of error and change in error. The fuzzy rulesare determined based on the sign and value of error and change inerror. For example, at the initial time when the system is about tostart, the system is at standstill and consequently, the error ispositive big (PB) and the change in error is zero (ZE). The actionshould be taken to increase the output to more PB. The rule forthis situation is expressed in Table 3 in the seventh column andthird row. The rule for other situations can be generated followingsimilar reasoning and with the respective value of error andchange in error.
Because the number of error and the change in error are 7 and 5,simultaneously, the maximum number of fuzzy rules is 35. Thecomplete rules for the PI- and PD-type fuzzy controllers aresummarized in Table 3. It is clearly seen that even though the fuzzyrule is simple but it requires a systematic way on how to generatethese rules and the step conducted here is following a graphicalapproach. The surface area of PI- and PD-type fuzzy is illustrated inFig. 15.
The fuzzy output gain, a and b, are specified as 0.75 and 3,respectively, while the input gains, K1 and K2 are set to 1. Thesetting of the incremental PID controller is tuned using theZiegler–Nichols frequency response. The sampling period of thecontroller is 10 ms, while the system speed range is specified as600–1200 rpm, with the maximum load applied at 2 Nm.
5.2. A linearization analysis at small error
Woo et al. [25] suggested a linearized PID-type FLC as in Eq. (3).The threshold value is set at 50 rpm where this value is chosensince it gives a better steady state error compared to other values,and also it is higher than the 2% tolerance bands at all operatingpoints. Interestingly, when the absolute of error is less than50 rpm, the control is by the incremental PID controller togetherwith the PD-type FLC, while the PI-type FLC does not involve.
Taking for example when the e¼0, _e¼0, de¼þ and d _e ¼þ ,the analysis of the linearized output is explained as follows. Inthis situation, the ei¼ZE subset, eiþ1¼PS subset, _ej¼ZE subsetand _ejþ1¼PS subset and the fuzzy rule is depicted in Table 4.Substitution the values to the PD-type fuzzy parameters wouldproduce the following:
P¼uðiþ1Þj�uij
eiþ1�ei¼
PS�ZE
250�0¼
20�0
250�0¼ 0:08
D¼uiðjþ1Þ�uij
_ejþ1� _ej¼
PS�ZE
20�0¼
20�0
20�0¼ 1
A¼ uij�Pei�D _ej ¼ 0�0:08:0�1:0¼ 0
u¼ AþPeþD _e
u¼ 0:08eþ _e
This gives a linear relation to the output. It consists of KP¼0.08and KD¼1. For other values of de and d _e , the linearizationanalysis gives the similar output form. This output combineswith the incremental PID controller when the absolute error isless than a threshold value. Thus, the proportional and derivativeactions have a higher gain than the normal fuzzy controller. Thisgives faster response and a smaller steady state error.
Up to this point, a simple design of controller running on PLCimplementing an FLC (the PID-type fuzzy) and a modified FLC (thehybrid of conventional PID and PID-type fuzzy controllers) has

-750 -500 -250 Error (rpm)
NB NM NS ZE PS PM PBµ
1
0 250 500 750
-30 -20 Change of Error (rpm)
NB NS ZE PS PBµ
1
-0.75 -0.50 -0.25 0.50 0.75Freq. (Hz)
NB NM NS ZE PS PM PBµ1
0 20 30 0 0.25
Fig. 13. Fuzzy membership functions. (a) Error input, (b) change in error input and (c) frequency output.
Table 3The Fuzzy rule base for PI-type and PD-type FLC.
E r r o r
NB NM NS ZE PS PM PB
CoENB NB NB NB NM NS ZE PS
NS NB NB NM NS ZE PS PM
ZE NB NM NS ZE PS PM PB
PS NM NS ZE PS PM PB PB
PB NS ZE PS PM PB PB PB
Fig. 14. Fuzzy rule-extraction using step responses.
Fig. 15. Surface area of the PI and PD-type PLC extracted from the fuzzy rule base.
Table 4Simplified fuzzy rule base for PD-type FLC at small error.
E r r o r
NS ZE PS PM
CoENS NM NS ZE PS
ZE NS ZE PS PM
PS ZE PS PM PB
PB PS PM PB PB
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 103
been realized. A fuzzy controller can be seen as a conventional PIDcontrolled, by having the configuration of the output stagedetermines the type of controller either in PI, PD or PID mode.Tuning the input and output gain of fuzzy controller is the sameas tuning the either P, I or D parameters. Several ways to improvethe fuzzy controller has been considered as modifying the para-meter in response to the current state. The information used totune can be a simple mathematical expression, peak value ofovershoot, a combination between error and change of error andrate of error.
The operating point for controller evaluation purpose is asillustrated in Fig. 16. Each simulation run takes 15 s to complete.At the time 5 and 10 s, a sudden change in torque and speedrequirements is applied. The evaluation includes sudden changein reference speed, sudden change in load applied and bothsimultaneously.
5.3. Performance criteria
The two basic primary aims of control are to follow thereference and to reject the disturbance [16].
The following performance criterion was used for measuringthe effectiveness of the controller in meeting the control

N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112104
objectives [34]. Different speed and load requirements are appliedto the system and the performances are taken for analysis andcomparisons. The error, e, the difference between reference andactual value, is commonly characterized into several quantities.The integrated absolute error (IAE) is one of the quantities toexpress the accumulative of the error magnitude. The IAE formulais as follows:
IAE¼
Z 10
9eðtÞ9dt ð10Þ
The quadratic criterion i.e. integral of squared error (ISE) givesthe error quantitative in quadratic manner. The ISE accumulatesthe squared error. The expression of ISE is shown as follows:
ISE¼
Z 10
e2ðtÞdt ð11Þ
The drawback of this criterion is that it gives large weight ifthe error is large, for example, a poorly damped system. Anothercriterion is the integral of time weighted absolute error (ITAE).The expression of ITAE is formulated in Eq. (12). Since it multiplesthe absolute error with time, the ITAE gives a small weight at theinitial time where the initial error is usually large. The ITAE
Load Torque
(Nm)
Speed (rpm)600
2A
C
B
D
1200
E F
1
0
Fig. 16. Different operating points for the speed-load torque requirements.
Fig. 17. Simulation of the dynamic motor speed for sudden rises and sudden
associates the weight to the error proportionally to the time.As the consequence, for the system with large steady state error,its ITAE value would also be large.
ITAE¼
Z 10
t9eðtÞ9dt ð12Þ
The control objective is to minimize the error of each perfor-mance criteria. The number of test patterns is larger than that inthe discussion below; however, the choice of tests pattern issufficient to illustrate on the controllers’ performance. Each testpattern should reveal the characteristic of the responses that areimportant in understanding the effect of the control action on thesystem being analyzed. The objective here is to use the simulationmodel to understand how the system comprises of the PLC as thecontroller, the PWM inverter and the motor behave in differentsituations by varying the input parameters. The operating pointsas depicted in Fig. 16 define the speed and torque (load) andhence the operating points associated to the initial, intermediateand final states of the test.
5.4. Test model 1: varying speed at constant load
In this experiment, a sudden change in reference speed atconstant load is introduced. The operating points as shown inFig. 16 are defined as follows: at no-load points E, F, and then backto E. For the case when a load is applied, the operating points are atA, B, and then back to A for 2 Nm load, and also at points C, D andthen back to C for 1 Nm load. Fig. 17 depicts the response for thesudden change in reference at 1 Nm load. Table 5 summarizes theperformance analysis for no-load, at 1 Nm load and at 2 Nm load,respectively. The sudden change is applied when time is at 5 s,during a speed rise from 600 rpm to 1200 rpm, and at 10 s, duringa speed fall from 1200 rpm to 600 rpm. As shown in Table 5, thesettling time when speed is increased or decreased is almost thesame but a little bit slower during the decrease in speed.
falls in reference speed at (a) no load, (b) 1 Nm load and (c) 2 Nm load.

Table 5Simulation results on the effectiveness of the controller based on the performance measures. The system is subjected to a sudden change in reference speed, at no-load,
1 Nm load, and at 2 Nm load.
Controller Ref. (rpm) Load (Nm) ts (ms) Load (Nm) ts (ms) Load (Nm) ts (ms)
2% 5% 2% 5% 2% 5%
FLC 600-1200 0 0.550 0.490 1 0.552 0.492 2 0.770 0.595
Modif. FLC 0.552 0.492 0.552 0.491 0.520 0.493
FLC 1200-600 0.600 0.553 0.597 0.550 0.560 0.540
Modif. FLC 0.593 0.548 0.595 0.550 0.568 0.546
IAE ISE ITAE IAE ISE ITAE IAE ISE ITAE
FLC 77.7e3 30.76e6 436.6e4 79.8e3 32.62e6 433.4e3 91.8e3 33.30e6 499.5e3
Modif. FLC 69.9e3 30.39e6 364.1e3 72.4e3 32.33e6 354.8e3 74.8e3 33.93e6 355.0e3
Fig. 18. Simulation of the dynamic motor speed for a sudden applying and a sudden release of 2 Nm load at (a) 600 rpm and (b) 1200 rpm.
Table 6Simulation results on the effectiveness of the controller based on the performance
measures. The system is subjected to a sudden change in load at the speed of
600 rpm.
Controller Ref.(rpm)
Load(Nm)
ts (ms) Load(Nm)
ts (ms)
2% 5% 2% 5%
FLC 600 0-1 0.500 0.417 0-2 3.740 0.457
Modif. FLC 0.583 0.527 0.687 0.633
FLC 1-0 0.530 0.437 2-0 0.880 0.472
Modif. FLC 0.565 0.500 0.665 0.620
IAE ISE ITAE IAE ISE ITAE
FLC 37.1e3 12.24e6 105.92e3 45.0e3 13.77e6 211.1e3
Modif. FLC 32.8e3 12.05e6 69.53e3 38.8e3 13.01e6 121.8e3
Table 7Simulation results on the effectiveness of the controller based on the performance
measures. The system is subjected to a sudden change in load at the speed of
1200 rpm.
Controller Ref.(rpm)
Load(Nm)
ts (ms) Load(Nm)
ts (ms)
2% 5% 2% 5%
FLC 1200 0-1 0.430 0.328 0-2 0.610 0.463
Modif. FLC 0.560 0.225 0.603 0.562
FLC 1-0 0.470 0.355 2-0 0.416 0.385
Modif. FLC 0.513 0.233 0.568 0.525
IAE ISE ITAE IAE ISE ITAE
FLC 72.3e3 55.05e6 123.3e3 91.5e3 56.66e6 277.7e3
Modif. FLC 67.5e3 54.85e6 88.8e3 73.0e3 55.79e6 136.5e3
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 105
A closer look at the performance criteria, ISE, IAE and ITAE,would show to exhibit smaller values. This demonstrates theaction of the modified controller to successfully regulate the speedand with an improved performance.
5.5. Test model 2: varying load at constant speed
The step is an example of a change in requirement that issignificantly higher or lower than the current situation. The dis-turbance could have originated from a change in load requirement.The operating points for speed at 600 rpm are set at points E, C, andthen back to E, also at points E, A and then back to E. For the speed at1200 rpm, the operating points are set at points F, D, and then backto F, and also at points F, B and then back to F. The sudden change inload is applied when time is at 5 and 10 s. Fig. 18 shows the speedresponse when a load is applied and released during a constantspeed. Tables 6 and 7 summarize the performance analysis. The
graphs representing the speed response, indicate that a change inload introduces an undershoot when load is released, and anovershoot when load is applied. On both situations the motor speedexperiences oscillations and takes sometime before it settles at theset-point. The explanation is that the controller parameter of theproposed modified FLC approach yields a bigger value than the FLCcontrol (PID-type fuzzy control). In other word, the increment of P
and D given by the PID controller is more than that is required toavoid either the overshoot or undershoot. The steady state error forthe modified FLC approach is found to be smaller than when usingthe FLC approach when a 2 Nm load is applied and released, and stillwith better performance.
5.6. Test model 3: varying reference speed and load simultaneously
It is assumed that the reference speed and the load arechanging at the same time when a disturbance is introduced.

Fig. 19. Simulation of the dynamic motor speed for a sudden increase in speed and load applied simultaneously at 5 s, and for a sudden decrease in speed and release of
load simultaneously at 10 s, (a) 1 Nm load and (b) 2 Nm load.
Fig. 20. Simulation of the dynamic motor speed for a sudden increase in speed and load release simultaneously at 5 s, and for a sudden decrease in speed and load applied
simultaneously at 10 s, (a) 1 Nm load and (b) 2 Nm load.
Table 8Simulation results on the effectiveness of the controller based on the performance measures. The system is subjected to a sudden
increased in speed and load, and also to a sudden reduced in speed and load.
Controller Ref. (rpm) Load (Nm) ts (ms) Load (Nm) ts (ms)
2% 5% 2% 5%
FLC 600-1200 0-1 0.558 0.508 0-2 0.800 0.655
Modif. FLC 0.560 0.508 0.570 0.544
FLC 1200-600 1-0 0.600 0.560 2-0 0.598 0.580
Modif. FLC 0.600 0.562 0.623 0.600
IAE ISE ITAE IAE ISE ITAE
FLC 81.1e3 36.21e6 455.2e3 98.0e3 42.0e3 580.8e3
Modif. FLC 76.3e3 36.04e6 413.9e3 82.4e3 43.2e3 456.9e3
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112106
Two cases will be considered: (a) the disturbance due to tworequirements, i.e., for an increase in speed and for an increase inload, and (b) the disturbance due to two of the followingrequirements, i.e., for an increase in speed and for a decrease inload. The responses for these cases are shown in Figs. 19 and 20,which summarize the performance analysis for cases (a) and (b).
The simulation results for the two cases do not show muchdifference in the specified performance indicators between theproposed modified FLC and the FLC. The main findings from thesimulation shows that the proposed modified-fuzzy controller yieldsbetter performance during the conditions when varying load at
constant speed and also when varying speed at constant load(Tables 8 and 9).
5.7. Implementation on PLC
Only the arithmetic and logic operations instructions setavailable in a PLC is utilized in the implementation of the fuzzycontrol of the motor speed control. The rules obtained from theexperiments on the speed control as discussed in Section 5, isapplied to the fuzzy control algorithm. The input signals to thecontroller are the linguistic variable of speed error and change in

Fig. 21. Steps for the calculation of the degree of membership functions during fuzzification.
Table 9Simulation results on the effectiveness of the controller based on the performance measures. The system is subjected to a sudden
increased in speed but a reduced load, and also to a sudden reduced in speed but an increased in load.
Controller Ref. (rpm) Load (Nm) ts (ms) Load (Nm) ts (ms)
2% 5% 2% 5%
FLC 600-1200 1-0 0.563 0.482 2-0 0.595 0.473
Modif. FLC 0.560 0.482 0.600 0.475
FLC 1200-600 0-1 0.640 0.563 0-2 0.870 0.600
Modif. FLC 0.635 0.560 0.850 0.595
IAE ISE ITAE IAE ISE ITAE
FLC 73.7e3 28.20e6 385.4e3 66.4e3 26.02e6 306.7e3
Modif. FLC 65.6e3 27.76e6 306.8e3 63.2e3 26.12e6 271.5e3
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 107
speed error, while the output signal is the frequency of the PWMinverter. The controller provides an output to the inverter thatdepends on the inter-related variables i.e., the error and the rateof change in the error of the actual speed and the desired speed,the fuzzy rules, and the speed and torque requirements Theoutput of the inverter, in the form of voltage and frequencysupplied to the induction-motor stator, depends on the control-ler’s output signal to the inverter and the constant V/Hz ratiorelationship. The objective of the controller is to provide stabilityin responses to disturbance and sudden changes in referencespeed and/or load. Consider the limitation on the computationcapability provided by PLC, programming and timing implement-ing the improvement strategy on PLC is challenging.
Fig. 21 depicts the flowchart of fuzzification, for the inputerror. The input has seven membership functions i.e., NB, NM, NS,ZE, PS, PM and PB. The markers Pt.6, Pt.5, Pt.4, Pt.3 and Pt.2correspond to the minimum value of error when the degree ofmembership function is non-zero for PB, PM, PS, ZE, NS and NM.
Seven data memory areas are required to keep the degree ofmembership functions. At the initial fuzzification step, all thesememory areas need to be set to zero as the initial value. Duringthe fuzzification, only two memory areas save the new data sincethe input data will only be under two nearest neighborhoodmembership functions, while the rest are kept unchanged. Theseseven data will be used as input data for the inference process.
The fuzzification for the second input change of error, followsthe same steps as the first input except the number of requiredmemory to save depends on the number of membership func-tions. As the second input has five membership functions, thetotal required memory to save the degree of membership functionis twelve words.
As the implemented inference method is a product-sum, for aparticular rule, the antecedents are multiplied and the resultbecomes the consequence for the rule and this is then accumu-lated to represent the fire of strength of a particular output.Fig. 22(a) shows the flowchart of inference process for NB output.

Fig. 22. Inference process flowchart. (a) The calculations of the degree of NB
output and (b) the calculation of the output membership function.
Fig. 23. Flowchart of modified FLC algorithm for implementation in PLC.
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112108
As summarized in Table 3, there are six rules influencing the NBoutput. As the NB output is influenced by six rules, there aresimilar six multiplications of the antecedents. The inferenceprocess flow diagram for other outputs is similar to Fig. 22(a).
The last stage of the fuzzy algorithm is defuzzification thattransforms the fire of strength of each output to a unique form ofoutput. The centre-of-gravity (COG) method is utilized and theoutput membership function in the form of singleton is as shownin Fig. 22(b).
5.8. Implementation of modified FLC (Hybrid FLC-incremental PID)
on PLC
The hybrid controller consists of two control algorithms, i.e.PID-fuzzy controller and incremental PID. The control algorithmoutputs are namely UFZ and dUPID for the PID-fuzzy and theincremental PID, respectively. Fig. 23 illustrates the flow diagramof the modified FLC in PLC.
The final control output is U(t) that comprises of a gain outputand accumulator output. The a gain is multiplied with the fuzzycontrol output, UFZ. The a gain output represents the output ofPD-type fuzzy control. The accumulator output accumulates theinput signal that comes either from the incremental conventionalPID output, dUPID, or the b gain output. The input signal to theaccumulator is determined by the comparison between an abso-lute error and a defined threshold error. At the early stage ofcontrol action or when the error is larger than a defined thresholdvalue, the accumulator input signal is given by b gain output andthe accumulator output represents the PI-type fuzzy controlleroutput. When the accumulator input is fed by incremental PIDcontrol, the update of accumulator is given by the incrementalPID. A sample ladder diagram of PLC program representing thehybrid control is illustrated as in Fig. 24 is generated based on thefuzzification flowchart of Fig. 21. As depicted in Fig. 24, one canimplement the fuzzification flowchart into the PLC by specifyingthe conditions of the error for the particular membership func-tions to be determined. Nevertheless it is not the intention of thispaper to discuss in great detail on the PLC programming andladder diagram code generation. More detail can be found in [35].
6. Experimental results
The simulation examples presented in Sections 5.4–5.6 illus-trate how the system could be performing when subjected to thevarious speed and load requirements. This section will now discussthe on-line implementation of the controller in regulating thespeed of the motor in response to certain operating conditions.The system runs in a sample period of 10 ms that corresponds tothe PLC scanned time. As in the simulation, the system is evaluatedfor a 15-s-duration, and the sudden change in the operatingconditions is applied when the time is at the 5 and 10 s. Thereare various operating conditions possible, but for the purpose ofillustration only the following extreme cases are presented.
6.1. Varying reference speed and load simultaneously
The response at the extreme situations i.e. during a sudden changein reference speed and load simultaneously are shown in Fig. 25. Theperformance analysis is summarized in Tables 10 and 11.
Interestingly, in Table 10 the modified FLC performs better thanFLC in maneuvering the speed to a steady state when a load andspeed is released. One may notice the quite large steady state errorin Fig. 25(b). The cause for this is firstly, the fuzzy rules used are notrefined enough to accommodate for the large load torque applied orreleased during when the speed is low, and secondly, due the slow

Fig. 24. Ladder diagram code generation change of error of the fuzzification of Fig. 20.
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 109
sampling-time i.e. limited to 10 ms. The slow sampling-time affectsthe observation of the controller to counter the disturbance andwhen a particular control is decided, it is not fast enough as well ascapable of providing an effective control action. This is where a moreprecise observation of error and change in error when a load iseither applied or released, especially when the speed is low and theload is at maximum should be conducted, as well as using a PLCwith a faster sampling-time. More refined fuzzy rules can beformulated that would improve the overshoot and undershootduring these situation. The observation should emphasize to thevalue of change in error when that situation happens and deter-mines the suitable output of the fuzzy control.
In relation to this as indicated in Table 11, for the case of FLC asthe controller, it is not possible to record the settling time at 2%tolerance band when the reference speed is increased while theload is released. This relates to the inability of the controller tobring the speed to within 2% band due to slow sampling-time ofthe PLC, which affects the control observation and action.
Fig. 26(a) reveals the manipulated variable (u) for a suddenchange in load at 1200 rpm. Here the manipulated variable of thePID controller is used as a reference for comparison with the FLC(i.e., PI and PD-types fuzzy controller) and the modified FLC(hybrid FLCþ incremental PID). The modified FLC is showing to
provide a better control signal to the PWM inverter as comparedto the FLC, since the later could not react as fast to the change inload requirement. With reference to Fig. 26(b), the manipulatedvariables of the FLC and modified FLC remain at the saturated-value of 2000 when the load is applied. The manipulated variable,u, for the controllers has been designed to saturate at 2000 whena load is applied. In this experiment, the value 2000 rpm is chosenas the upper bound of the VSD input, and this implies that thePI-type portion of the FLC cannot quickly reduce the integratoroutput after saturation.
6.2. Low reference speed with varying load
The following experiment is conducted to evaluate the outputresponse during a low speed operation. Experimental results foroutput response and the manipulated variables with load 2 Nm andspeed 600 rpm are depicted in Fig. 27. The introduction of a loadslows down the motor but some moments later it regains speed dueto the controller’s action. A similar phenomenon would also beobserved at much lower speed until the operating speed is some-where below 300 rpm that is when the motor is brought to a haltafter the load of 2 Nm is applied. In terms of the controller’s actionsat this low threshold speed, the controller is not able to provide the

4 5 6 7 8 9 10 11 12200
400
600
800
1000
1200
1400
Ref.PID FLCModif. PID FLC
4 5 6 7 8 9 10 11 12200
400
600
800
1000
1200
1400
Ref.PID FLCModif. PID FLC
4 5 6 7 8 9 10 11 12200
400
600
800
1000
1200
1400
Ref.PID FLCModif. PID FLC
4 5 6 7 8 9 10 11 12200
400
600
800
1000
1200
1400
Ref.PID FLCModif. PID FLC
Fig. 25. Experimental results for sudden change in reference speed and load simultaneously. (a) Load applied and released is 1 Nm, (b) load applied and released is 2 Nm,
(c) load released and applied is 1 Nm and (d) load released and applied is 2 Nm.
Table 10Comparison on the effectiveness of the controller based on the performance measures. The system is subjected to a sudden
increased in speed and load, and also to a sudden reduced in speed and load.
Controller Ref. (rpm) Load (Nm) ts (s) Load (Nm) ts (s)
2% 5% 2% 5%
FLC 600-1200 0-1 0.913 0.747 0-2 8.453 0.730
Modif.–FLC 0.776 0.487 3.403 0.686
FLC 1200-600 1-0 1.270 0.877 2-0 1.250 0.917
Modif.–FLC 1.060 0.847 1.090 0.937
IAE ITAE ISE IAE ITAE ISE
FLC 76.59e3 429.30e3 33.14e6 104.91e3 636.86e3 49.19e3
Modif.–FLC 73.77e3 405.92e3 32.49e6 93.42e3 558.39e3 45.94e6
Table 11Comparison on the effectiveness of the controller based on the performance measures. The system is subjected to a sudden
increased in speed but a reduced load, and also to a sudden reduced in speed but an increased in load.
Controller Ref. (rpm) Load (Nm) ts (s) Load (Nm) ts (s)
2% 5% 2% 5%
FLC 600-1200 1-0 – 0.560 2-0 0.733 0.550
Modif.–FLC 0.833 0.550 0.743 0.560
FLC 1200-600 0-1 – 0.707 0-2 1.630 1.347
Modif.–FLC 0.850 0.677 1.270 0.557
IAE ITAE ISE IAE ITAE ISE
FLC 73.75e3 398.36e3 25.81e6 72.88e3 310.16e3 24.98e6
Modif.–FLC 66.59e3 332.30e3 25.37e6 68.85e3 290.56e3 24.73e6
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112110

Fig. 26. Manipulated variables. (a) A sudden change of load, applied at 5 s and released at 10 s, reference speed at 1200 rpm and 1 Nm load and (b) a sudden change of
load, applied at 5 s, and released at 10 s, reference speed at 1200 rpm and 2 Nm load.
Fig. 27. Experimental results for the output response and manipulated variables, with load of 2 Nm and speed at 600 rpm. (a) Speed response for a sudden change of load,
applied at 5 s and released at 10 s and (b) manipulated variable for a sudden change of load, applied at 5 s, and released at 10 s.
Table 12Comparison on the effectiveness of the controller based on the performance
measures. The system is subjected to a sudden increased and reduced of load, at a
reference speed of 600 rpm.
Controller Ref.
(rpm)
Load
(Nm)
ts (s) Load
(Nm)
ts (s)
2% 5% 2% 5%
PID 600 0-1 0.630 0.320 0-2 1.370 0.763
FLC 1.540 1.127 - 1.144
Hybrid 0.650 0.598 2.610 1.033
PID 1-0 0.610 0.239 2-0 0.900 0.532
FLC 0.700 0.437 0.750 0.507
Hybrid 0.863 0.390 0.593 0.520
IAE ISE ITAE IAE ISE ITAE
PID 3.12e3 1.04e6 7.50e3 4.11e3 1.18e6 13.63e3
FLC 3.46e3 1.02e6 9.70e3 5.64e3 1.45e6 26.26e3
Hybrid 2.76e3 9.40e5 7.56e3 4.25e3 1.28e6 16.11e3
N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112 111
necessary manipulated variables to revive the motor. This signifiesthat at the much lower speed operation the constant V/Hz ratiocontrol needs to be revised and one of the options is by introducing‘voltage boost’ at the lower frequency to maintain the flux constantby compensating the ‘stator impedance drop’, so that the air gap fluxper pole and torque become available up to zero speed. Unless toobtain an optimize value when applying the voltage boost, findingand estimating the threshold speed should not be a difficult problemsince in this case, 300–350 rpm should be an acceptable value.
In another perspective, as can be seen in Fig. 27(a), the drivereaches the reference speed relatively fast when using PID ascompared to the FLC (PI and PD-types fuzzy controller) and themodified FLC (hybrid FLCþ incremental PID). Another observationis the drop in speed when a load applied using PID control is lessas compared to the FLC.
At the lower speed operation, Table 12 suggests that the PIDfares a better control action as compared to the modified FLC.Fig. 27(b) shows the manipulated variable of the three controllersanticipating the load applied and released. It is clearly shownthat the manipulated variable of the modified FLC (hybrid FLCþincremental PID) has quite a similar pattern as the PID control,however, with a slightly lagged reaction. On the other hand, themodified FLC controller, which is essentially an enhancement to theFLC (PIþPD-type fuzzy controller) with the incorporation of incre-mental PID, is shown to respond fast to a sudden change in load ascompared to the FLC (PIþPD-type fuzzy controller). In the controlperspective, the controller’s action on the error is improved: inthe case when the error is small. When the error is lower than theintegrator switch threshold value, the input of integrator at theoutput side of hybrid-fuzzy controller is given by the incremental
PID controller. An attractive aspect of the modified FLC (hybridFLCþ incremental PID) is that its performance resembles the PIDcontroller.
7. Conclusion
The aim of this work has been to address the design, simulationand implementation of a PLC-based fuzzy controller PWM-drivenof an induction motor drive. To achieve wide ranges of speed

N. Saad, M. Arrofiq / Robotics and Computer-Integrated Manufacturing 28 (2012) 95–112112
operation, requires the incorporation of two control modes, namelythe PIþPD-type fuzzy controller and the incremental PID control-ler, and hence a modified FLC has been proposed. The selectionof the control mode depends on the phase of drive operations. Themodified FLC operation has shown to give good response when thedrive system is subjected to disturbances and sudden changes inreference speed and/or load. Overall, this study indicates thefollowing outcomes: an improvement of control action, whichdoes not need the complex mathematical model of real plant isfeasible. Also the control algorithm could be easily implementedinto the PLC that would perform well in industrial environment.
This work has contributed to an improved understanding ofthe procedure for configuring and implementing a PLC-basedfuzzy controlled PWM-driven of an induction motor with con-stant V/Hz ratio control. The work presented here offers somepromising tools in terms of hardware and software handling of aPLC system and provides avenues for other research scope toaddress different aspects of issues pertaining to the PLC-basedfuzzy controller and promises the means to utilize the advantagesof PLC in adjustable speed drives application.
Acknowledgment
The authors acknowledge the support of the Ministry ofScience, Technology and Innovation of Malaysia and the UniversitiTeknologi PETRONAS, Malaysia through the awards of e-Science03-02-02-SF0061 and STIRF 06/06, respectively.
References
[1] Erickson KT. Programmable logic controllers. IEEE Potentials 1996;15:14–7.[2] Erickson KT. Technology 1993. Industrial electronics. IEEE Spectrum
1993;30:58–60.[3] Al-Ali AR, Negm MM, Kassas M. A PLC based power factor controller for a
3-phase induction motor. In: Proceedings of the IEEE Industry ApplicationsConference; 2000.
[4] Arrofiq M, Saad N. PLC-based Fuzzy Logic Controller for induction-motordrive with constant V/Hz ratio. In: Proceedings of the InternationalConference on Intelligent and Advanced Systems; 2007.
[5] Arrofiq M, Saad N. A PLC-based self-tuning PI-fuzzy controller for linear andnon-linear drives control. In: Proceedings of the IEEE Power and EnergyConference; 2008.
[6] Din ASZE. High performance PLC controlled stepper motor in robot manip-ulator. In: Proceedings of the IEEE International Symposium on IndustrialElectronics; 1996.
[7] Graham AM, Etezadi-Amoli M. Design, implementation, and simulation of aPLC based speed controller using fuzzy logic. In: Proceedings of the IEEEPower Engineering Society Summer Meeting, Seattle, WA; 2000.
[8] Karasakal O, Yesil E, Guzelkaya M, Eksin I. The implementation and compar-ison of different type self-tuning algorithms of fuzzy PID controllers on PLC.In: Proceedings of the World Automation Congress; 2004.
[9] Li H-X, Tso SK. A fuzzy PLC with gain-scheduling control resolutionfor a thermal process—a case study. Control Engineering Practice 1999;7:523–9.
[10] Li D, Li F, Huang X, Lai Y, Zheng S. A model based integration framework forcomputer numerical control system development. Robotics and Computer-Integrated Manufacturing 2010;26:333–43.
[11] Ioannides MG. Design and implementation of PLC-based monitoring controlsystem for induction motor. IEEE 2004;19(3):469–76.
[12] Fabian M, Hellgren A. PLC-based implementation of supervisory control fordiscrete event systems. In: Proceedings of the 37th IEEE Conference onDecision and Control; 1998.
[13] Hossain A, Suyut SM. Monitoring and controlling of a real-time industrialprocess using dynamic model control technology. In: Proceedings of the IEEEInd. Application Soc. Workshop on Dynamic Modeling Control Applicationsfor Industry; 1997. p. 20–5.
[14] Akula S, Karunakaran KP. Hybrid adaptive layer manufacturing: an Intelligentart of direct metal rapid tooling process. Robotics and Computer-IntegratedManufacturing 2006;22:113–23.
[15] Astrom KJ, Hagglund T. The future of PID control. Control EngineeringPractice 2001;9:1163–75.
[16] Astrom KJ, Hagglund T. PID controllers: theory, design, and tuning. 2nded.Instrument Society of America; 1994.
[17] Lee CC. Fuzzy logic in control systems: fuzzy logic controller. I. IEEETransactions on Systems, Man and Cybernetics 1990;20:404–18.
[18] Lee CC. Fuzzy logic in control systems: fuzzy logic controller. II. IEEETransactions on Systems, Man and Cybernetics 1990;20:419–35.
[19] Chung H-Y, Chen B-C, Lin J-J. A PI-type fuzzy controller with self-tuningscaling factors. Fuzzy Sets and Systems 1998;93:23–8.
[20] Guzelkaya M, Eksin I, Yesil E. Self-tuning of PID-type fuzzy logic controllercoefficients via relative rate observer. Engineering Applications of ArtificialIntelligence 2003;16:227–36.
[21] Karasakal O, Yesil E, Guzelkaya M, Eksin I. Implementation of a new self-tuning fuzzy PID controller on PLC. Turkish Journal of Electrical Engineering2005;13:277–86.
[22] Mudi RK, Pal NR. A robust self-tuning scheme for PI- and PD-type fuzzycontrollers. IEEE Transactions on Fuzzy Systems 1999;7:2–16.
[23] Mudi RK, Pal NR. A self-tuning fuzzy PI controller. Fuzzy Sets and Systems2000;115:327–38.
[24] Qiao WZ, Mizumoto M. PID type fuzzy controller and parameters adaptivemethod. Fuzzy Sets and Systems 1996;78:23–35.
[25] Woo Z-W, Chung H-u, Lin J-J. A PID type fuzzy controller with self-tuningscaling factors. Fuzzy Sets and Systems 2000;115:321–6.
[26] Ibrahim Z, Levi E. A comparative analysis of fuzzy logic and PI speed controlin high-performance AC drives using experimental approach. IEEE Transac-tions on Industry Applications 2002;38:1210–8.
[27] Kim S-M, Han W-Y. Induction motor servo drive using robust PID-like neuro-fuzzy controller. Control Engineering Practice 2006;14:481–7.
[28] Yaacob S, Mohamed FA. Black-box modelling of the induction motor. In:Proceedings of the 37th SICE Annual Conference; 1998. p. 883–6.
[29] Mohamed FA, Koivo H. Modelling of induction motor using non-linear neuralnetwork system identification. In: Proceedings of the SICE 2004 AnnualConference, vol. 2; 2004. p. 977–82.
[30] Takami KM, Mahmoudi J. Identification of a best thermal formula and modelfor oil and winding of power transformers using prediction methods.In: Proceedings of the 48th Scandinavian Conference on Simulation andModeling; 2007. p. 183–8.
[31] Barker HA, Godfrey KR. System identification with multi-level periodicperturbation signals,. Control Engineering Practice 1999;7:717–26.
[32] Ljung L. System identification toolboxTM
7 user’s guide. MathWorks, Inc.; 2009.[33] Arrofiq M, Saad N, Karsiti MN. An identification of model for integrated variable
speed drive, induction motor and dynamometer. In: Proceedings of the 2009IEEE Symposium on Industrial Electronics and Applications. pp 337–42.
[34] Arrofiq M, Saad N. Control of induction motor drives using modified-fuzzylogic methods. In: Proceedings of the 2010 IEEE International Conference onSystems, Man, and Cybernetics. p. 612–9.
[35] Arrofiq M A PLC-based hybrid fuzzy PID controller for PWM-driven variablespeed drive. Phd Thesis. Department of Electrical and Electronics Engineer-ing, Universiti Teknologi PETRONAS; April 2010.

word版下载:http://www.ixueshu.com
免费论文查重:http://www.paperyy.com
3亿免费文献下载:http://www.ixueshu.com
超值论文自动降重:http://www.paperyy.com/reduce_repetition
PPT免费模版下载:http://ppt.ixueshu.com
-------------------------------------------------------------------------------




![Fuzzy Controlled ZVS Asymmetrical PWM Full-bridge DC-DC ... · robust fuzzy logic controller and fuzzy load conductance observer for DC-DC boost converter is designed [16]. State](https://static.fdocuments.us/doc/165x107/5f4a3cdbda168c151e4e1cc6/fuzzy-controlled-zvs-asymmetrical-pwm-full-bridge-dc-dc-robust-fuzzy-logic-controller.jpg)