A parameter uniform difference scheme for parabolic partial differential equation with a retarded...
11
A parameter uniform difference scheme for parabolic partial differential equation with a retarded argument Aditya Kaushik * , K.K. Sharma, Manju Sharma Department of Applied Mathematics, Universität Bremen, D-28359 Bremen, Germany Department of Mathematics, Panjab University, Chandigarh, India Department of Mathematics, Kurukshetra University, Kurukshetra 136119, Haryana, India article info Article history: Received 9 March 2009 Received in revised form 24 April 2010 Accepted 28 April 2010 Available online 15 May 2010 Keywords: Convection diffusion Delay differential equations Dynamical systems Numerical modelling Parameter estimation Decomposition abstract The paper deals with the analysis of a non-stationary parabolic partial differential equation with a time delay. The highest order derivative term is affected by the small parameter. This is precisely the case when the magnitude of the convective term becomes much larger compare to that of diffusion term. The solution of problem exhibits steep gradients in the narrow intervals of space and short interval of times. In these cases a dissipative loss turned out to be more complex. Even for the one spatial dimension and one temporal var- iable, not all difference scheme can capture these steep variation. Although the analysis is restricted to the model in one space dimension, the technique and comparison principles developed should prove useful in assessing the merits of numerical solution of other non- linear model equations too. Ó 2010 Elsevier Inc. All rights reserved. 1. Introduction It is a well-established principle to model the evolution of physical, biological and economic systems using ordinary or partial differential equations, in which the response of the system depends purely on the current state of the system. How- ever, in many applications the response of the system can be delayed, or depend on the past history of the system in a more complicated way. In most application in the life sciences, a delay is introduced when there are some hidden variables and processes which are not well understood but are known to cause a time lag. Dynamical systems which respond in this way are called delay differential equations (DDEs). Furthermore, in applications it is typical for the system to be perturbed by noise, be intrinsically random, or in which certain parameters in the model are unknown. In these cases, it is more appro- priate to model the dynamics of the system using stochastic delay differential equations (SDDEs). The work of the delay dif- ferential equations group involves the study of both DDEs and SDDEs, concentrating in particular on their long-time behavior. Areas of the sciences in which delay differential equations are applied include the study of materials with memory (vis- coelastic materials); in mathematical demography and population dynamics, in the study of the dynamics of artificial neural networks in which there are transmission delays; and in problems in mathematical finance in which inefficient markets are modelled. In the sciences, stochastic differential equations are used to model systems that are inherently random, or subject to random external perturbations. Furthermore, systems in continuum mechanics (such as those with viscoelastic materials) 0307-904X/$ - see front matter Ó 2010 Elsevier Inc. All rights reserved. doi:10.1016/j.apm.2010.04.020 * Corresponding author at: Department of Applied Mathematics, Universität Bremen, D-28359 Bremen, Germany. E-mail address: [email protected] (A. Kaushik). Applied Mathematical Modelling 34 (2010) 4232–4242 Contents lists available at ScienceDirect Applied Mathematical Modelling journal homepage: www.elsevier.com/locate/apm
-
Upload
aditya-kaushik -
Category
Documents
-
view
213 -
download
0
Transcript of A parameter uniform difference scheme for parabolic partial differential equation with a retarded...

Applied Mathematical Modelling 34 (2010) 4232–4242
Contents lists available at ScienceDirect
Applied Mathematical Modelling
journal homepage: www.elsevier .com/locate /apm
A parameter uniform difference scheme for parabolic partialdifferential equation with a retarded argument
Aditya Kaushik *, K.K. Sharma, Manju SharmaDepartment of Applied Mathematics, Universität Bremen, D-28359 Bremen, GermanyDepartment of Mathematics, Panjab University, Chandigarh, IndiaDepartment of Mathematics, Kurukshetra University, Kurukshetra 136119, Haryana, India
a r t i c l e i n f o
Article history:Received 9 March 2009Received in revised form 24 April 2010Accepted 28 April 2010Available online 15 May 2010
Keywords:Convection diffusionDelay differential equationsDynamical systemsNumerical modellingParameter estimationDecomposition
0307-904X/$ - see front matter � 2010 Elsevier Incdoi:10.1016/j.apm.2010.04.020
* Corresponding author at: Department of ApplieE-mail address: [email protected] (A. Kaush
a b s t r a c t
The paper deals with the analysis of a non-stationary parabolic partial differential equationwith a time delay. The highest order derivative term is affected by the small parameter.This is precisely the case when the magnitude of the convective term becomes much largercompare to that of diffusion term. The solution of problem exhibits steep gradients in thenarrow intervals of space and short interval of times. In these cases a dissipative lossturned out to be more complex. Even for the one spatial dimension and one temporal var-iable, not all difference scheme can capture these steep variation. Although the analysis isrestricted to the model in one space dimension, the technique and comparison principlesdeveloped should prove useful in assessing the merits of numerical solution of other non-linear model equations too.
� 2010 Elsevier Inc. All rights reserved.
1. Introduction
It is a well-established principle to model the evolution of physical, biological and economic systems using ordinary orpartial differential equations, in which the response of the system depends purely on the current state of the system. How-ever, in many applications the response of the system can be delayed, or depend on the past history of the system in a morecomplicated way. In most application in the life sciences, a delay is introduced when there are some hidden variables andprocesses which are not well understood but are known to cause a time lag. Dynamical systems which respond in thisway are called delay differential equations (DDEs). Furthermore, in applications it is typical for the system to be perturbedby noise, be intrinsically random, or in which certain parameters in the model are unknown. In these cases, it is more appro-priate to model the dynamics of the system using stochastic delay differential equations (SDDEs). The work of the delay dif-ferential equations group involves the study of both DDEs and SDDEs, concentrating in particular on their long-timebehavior.
Areas of the sciences in which delay differential equations are applied include the study of materials with memory (vis-coelastic materials); in mathematical demography and population dynamics, in the study of the dynamics of artificial neuralnetworks in which there are transmission delays; and in problems in mathematical finance in which inefficient markets aremodelled. In the sciences, stochastic differential equations are used to model systems that are inherently random, or subjectto random external perturbations. Furthermore, systems in continuum mechanics (such as those with viscoelastic materials)
. All rights reserved.
d Mathematics, Universität Bremen, D-28359 Bremen, Germany.ik).

A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242 4233
or in financial economics (in which agents form their decisions based on the market’s past performance) have governingequations which involve integral terms representing the effect of the past. Stochastic delay differential equations attemptto capture the effects of both randomness and memory. There are many examples where time delay and spatial diffusionenter control system. For some illustrative examples follow Wu [1] and Hale and Lunel [2]. Two classical references for DDEsare the books by Bellman and Cooke [3] and Elsgol’s and Norkin [4]. These are rich sources for analytical techniques andmany interesting examples. Kolmanovskii and Myshkis [5], Kolmanovskii and Nosov [6] gave a rigorous treatment of a wideclass of problems. Starting from the first edition, the monograph of Hale and Lunel [2] is a standard source on the theory ofdelay equations. Another substantial monograph is by Diekmann et al. [7]. Kuang [8] and Banks [9] pay particular attentionto problems in population dynamics, the former also looked at neutral equations. Early books by Cushing [10] and Halanay[11] have been very stimulating for the development of the field.
There are several numerical strategies for delay differential equations. Some of those undertaking numerical studies ofdelay equations in biology device an indirect approach, rather than use purpose built numerical codes for delay differentialequation. Thus they eliminate lag terms from delay differential equations by introducing additional variables on one of thefollowing basis:
� the methods of steps [3] allows one to represent a delay differential equation equivalently on successive intervals [0,s*],[s*,2s*], . . ., [(n � 1)s*,ns*] as successive systems of ordinary differential equations with increasing dimension;� a process represented by a delay can be approximated by introducing a number of intermediate stages using an ordinary
differential equation system to mimic the transition through the stages [12];� the effect of the time lag can be modeled by using gearing up variables [13].
Whereas some modelers ignore the ‘‘lag” effect and use an differential equations model as a substitute for a delay differ-ential equation model. Kuang [8], comments under the heading ‘‘small delays can have large effects” on the dangers thatresearchers risk if they ignore lags which they think are small. There are inherent qualitative differences between delay dif-ferential equations and finite systems of differential equations that make such a strategy risky. Most recently Kumar andKaushik [14] and Kaushik [15] uses the Taylor series approximation for the term containing delay or advance. But the solu-tions of the equation may behave quite differently from the solution of the ‘‘approximating” PDE obtained by replacingu(x,t � s) with the first terms of the Taylor series. The scenario outlined above can be modified to provide numerical methodsfor a wide range of deterministic retarded differential equations. Note that rigorous development of effective numerical tech-niques for stochastic DDEs is a relatively unexplored area requiring further attention from numerical analysts.
Our concern here is with the role of the numerical analysis of DDEs of convection diffusion type which are singularly per-turbed from mathematical perspective. Singularly perturbed nature of equations is apparent when the magnitude of the con-vective terms is much larger than that of diffusion terms i.e. the magnitude of the term involving first order derivatives ismuch greater than terms involving second order derivatives. In specific situations, and with appropriate scaling of the vari-ables, this is equivalent to the condition that the scaled coefficients (multiplied to the highest order derivative term) havemagnitudes that are much smaller than unity (see Kaushik [16]) and we say that the differential equation is singularly per-turbed. It is well known [15], a solution of singularly perturbed problem will often behave analytically quite differently froma solution of the original equation. There are regions known as outflow boundary regions where solution has a very steepgradient [17]. There are three important components to our approach: first, the place of DDEs in modelling in bioscience(which involves an understanding of the underlying science), second, familiarity with the a priori estimates required toestablish the robust layer resolving schemes that uses some analytical features of DDEs, and third, construction of the robustnumerical schemes of higher order accuracy.
2. Modeling
Here, we present some basic definitions and mathematical preliminaries of singular perturbations and time scales. Con-sider a system described by a linear, second order, boundary value problem:
�€uðxÞ þ _uðxÞ þ uðxÞ ¼ 0; uðx ¼ 0Þ ¼ ui; uðx ¼ 1Þ ¼ uf ; ð2:1Þ
where the small parameter � multiplies the highest derivative. Here and in the rest of this paper, dot (.) and double dot (..)indicate first and second derivatives, respectively, with respect to x. As � tends to zero either from positive or negative values,we have:
lim�!oþfuðx; �Þg ¼ uf expð1� xÞ; 0 < x 6 1; ð2:2Þ
lim�!o�fuðx; �Þg ¼ ui expð�xÞ; 0 6 x < 1: ð2:3Þ
The degenerate (outer, or reduced order) problem:
_uð0ÞðxÞ þ uð0ÞðxÞ ¼ 0 ð2:4Þ

4234 A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242
obtained by suppressing the small parameter � in (2.1), has the boundary condition u(0)(x = 1) = uf if � tends to 0+ and u(0)
(x = 0) = ui if � tends to 0�. In either case, one boundary condition has to be ‘‘sacrificed” in the process of degeneration.The important features of singular perturbations are summarized as follows:
1. The problem (2.1) where the small parameter e is multiplying the highest derivative is called a ‘‘singularly perturbed”(singular perturbation) problem if the order of the problem becomes lower for e = 0 than for e – 0 [17].
2. There exists a boundary layer where the solution changes rapidly.3. The degenerate problem, also called the ‘‘unperturbed problem, is of reduced order and cannot satisfy all the given
boundary conditions of the original (full, or perturbed) problem.4. The singularly perturbed problem (2.1) has two widely separated characteristic roots giving rise to slow and fast
components (modes) in its solution. Thus, the singularly perturbed problem possesses a ‘‘two time- scale” property.The simultaneous presence of ‘‘slow” and ‘‘fast” phenomena makes the problem ‘‘stiff” from the numerical solutionpoint of view.
3. Statement of the problem
Consider the following class of singularly perturbed time delayed parabolic partial differential equation of convection dif-fusion type having reaction term with a retarded argument:
L�uðx; tÞ � utðx; tÞ � �uxxðx; tÞ þ auxðx; tÞ þ buðx; t � sÞ þ cuðx; tÞ ¼ f ðx; tÞ; ð3:1aÞuðx; sÞ ¼ uðx; sÞ; x 2 X � ð0;1Þ; s 2 ½�s;0Þ;uðx;0Þ ¼ uðx;0Þ ¼ uðxÞ; x 2 X � ð0;1Þ;
ð3:1bÞ
uð0; tÞ ¼ U; uð1; tÞ ¼ W; t 2 ð0; T�; ð3:1cÞ
where (x,t) 2 D � {(x,t) 2X � (0,T] � (0,1) � (0,T]}, and 0 < � � 1 is the singular perturbation parameter and s is the timedelay (s = T/k for some integer k > 1) so that 0 6 s = o(�2) and the prescribed function f(x,t), a(x,t) and b(x,t) are sufficientlysmooth and bounded function which satisfy:
0 < b 6 aðx; tÞ; 0 < g 6 bðx; tÞ and cðx; tÞ P 0;
where g and b are positive constant independent of e. However, for �? 0, the solution of the problem typically exhibits layerbehavior depending on the sign of the convection term. The investigation here is to examine the solution when the delay isnon-zero and the effect of the delay on the boundary layer solution.
4. Auxiliary results
For the solution of the problems of above type (3.1), where the delay values t � s are bounded away from t by a positiveconstant the existence can be verified using the method of steps. For if, let us suppose the solution is known, say:
uðx; tÞ ¼ uðx; sÞ; ðx; tÞ 2 ½0;1� � ½�s; 0Þ;
then u(x,t � s) is a known function of (x,t) 2 [0,1] � [0,s] and (3.1) becomes a classical partial differential equation, and can betreated using the known existence theories [12]. Then we proceed further using the usual method of steps. For a general dis-cussion of the properties enjoyed by the solution of parabolic differential equations we refer to [18,19]. The broad analysispresented there is classical in nature, for it is concerned with solution lying in Holder space. Let a 2 (0,1). A functionW : Q ! R is said to be Holder continuous on Q with exponent a, if:
jWjQa :¼ supðx;tÞ;ðx0 ;t0 Þ 2 QjWðx; tÞ �Wðx0; t0Þjðdistððx; tÞ; ðx0; t0ÞÞÞa
<1;
where we define dist((x,t), (x0,t0)) = ((x � x
0)2 + jt � t
0 j)1/2 for such a function W we set:
kWkQa :¼ jWjQa þ supðx;tÞ2QjWðx; tÞj:
For all sufficiently smooth functions W, we set:
kWkQ2þa :¼ kWkQa þ koW=oxkQa þ ko2W=ox2kQa þ koW=otkQa :
Now define the space:
C2þaðQÞ ¼ W 2 CðQÞ : kWkQ2þa1n o
:
Bobisud [20] gives explicit compatibility and regularity conditions so that u 2 C2(D) and indicates how to derive necessaryand sufficient conditions so that u 2 Cn(D). Heuristic argument from Vulkov [21] and Ladyzhenskaya and Uraltseva [22] givesthe required compatibility conditions as

A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242 4235
uð0;0Þ ¼ Uð0Þ; uð1; 0Þ ¼ Wð0Þ; ð4:1aÞ
dUð0Þdt
� eo2uð0;0Þ
ox2 þ að0; 0Þ ouð0;0Þox
þ cð0;0Þuð0; 0Þ ¼ �bð0;0Þuð0;�sÞ þ f ð0;0Þ; ð4:1bÞ
dWð0Þdt
� eo2uð1;0Þ
ox2 þ að1;0Þ ouð1;0Þox
þ cð1;0Þuð1;0Þ ¼ �bð1;0Þuð1;�sÞ þ f ð1;0Þ: ð4:1cÞ
Note that U,W 2 C1([0,T]) and u 2 C2;1ðDÞ for (4.1) to make sense. The following theorem then gives the sufficient con-dition for the existence of the unique solution [12].
Theorem 4.1. Let a; b; c; f 2 Caþ2n�2;a=2þn�1ðDÞ;u 2 Caþ2n;a=2þnðDt¼0Þ and U;W 2 Caþ2n;a=2þnðDx2f0;1gÞ;a > 4;n P 0 and let thecompatibility conditions (4.1) are fulfilled. Then there exists an unique solution ue of (3.1) such that ue 2 C2nþ4þm;nþ2þm=2ðDÞ.
The parabolic operator Le given in (3.1) satisfies:
Lemma 4.2 (Maximum principle). If a function U 2 C2,1 P 0, for all (x,t) 2 oD Then L�Uðx; tÞ P 0 for all (x,t) 2 D implies thatU(x,t) P 0 for all ðx; tÞ 2 D.
Proof. Let (x*,t*) be such that Uðx�; t�Þ ¼minx2DUðx; tÞ, and suppose that U(x*, t*) < 0. It is then clear from the hypothesis that(x*, t*) R oD. Hence, (x*, t*) 2 D and
Uxðx�; t�Þ ¼ 0; Utðx�; t�Þ ¼ 0; and Uxxðx�; t�Þ P 0:
Further,
L�Uðx�; t�Þ ¼ ��o2Uðx�; t�Þ
ox2 þ bðx; tÞUðx�; t� � sÞ þ cðx; tÞUðx�; t�Þ 6 0;
which is a contradiction to our assumption. Hence our assumption U(x*,t*) < 0 is wrong. Hence, U(x,t) P 0 for all x 2 D. Hencethe result holds. h
As an immediate consequence of the Maximum Principle we may obtain:
Lemma 4.3. Let U(x,t), W(x,t) 2 C2,1 satisfy the relation j L�½U� j< L�½W�, where L� is the parabolic operator as defined in (3.1). IfjUj 6 W holds on the boundary then jUj 6 W holds through out the domain.
For obvious reasons the function W is called a barrier function for U. As an application of this lemma we immediateobtain:
Theorem 4.4. There exist a number C independent of the � such that for all sufficiently small positive values of � the relation:
kuðx; tÞ �uðxÞk1 6 CT; and
kuðx; tÞk1 6 C 0; t 2 ð0; T�:ð4:2Þ
Proof. We set g(x,t) = u(x,t) � u(x), then g satisfies the differential equation:
L�gðx; tÞ ¼ L�uðx; tÞ þ �uxxðxÞ � aðx; tÞuðxÞ � ðbðx; tÞ þ cðx; tÞÞuðxÞ ¼ f þ �uxxðxÞ � aðxÞuðxÞ � ðbðx; tÞ þ cðx; tÞÞuðxÞ¼ H�ðx; tÞ
and
gðx;0Þ ¼ 0; 0 < x < 1;gð0; tÞ ¼ U�uð0Þ; gð1; tÞ ¼ W�uð1Þ; 0 6 t 6 1:
Since b(x,t), c(x,t) > 0 and s < T, we obtain:
L�ðCTÞ ¼ M þ bMðT � sÞ þ cMT ¼ Cð1þ bðT � sÞ þ cTÞ P C: ð4:3Þ
It is immediate from lemma (4.3) and inequality (4.3) that CT is the barrier function for g for all � small provided C ischosen so large that:
C > supðx;tÞ2Djf ðx; tÞ � L�uðxÞj; and CT P jgj on oD:
Thus for 0 < � 6 1 and for all ðx; tÞ 2 X� ½0; T�, we have:
kuk1 � kuðxÞk1 6 jkuk1 � kuðxÞk1j 6 kuðx; tÞ �uðxÞk1 6 CT:

4236 A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242
Since U(x) is sufficiently smooth and x and t also lie in the bounded interval, it is clear with the above relations that thesolution u is bounded i.e.
kuðx; tÞk1 6 CTþ kuðxÞk1 ¼ C 0; ðx; tÞ 2 X� ½0; T�: � ð4:4Þ
In the remaining section we shall be concerned with the a priori estimates on the derivatives for the solution of problem(3.1) as derived for parabolic and elliptic equations in [21]. We suppose that the compatibility condition (4.1) holds so thatthe solution of the initial boundary value problem is smooth enough for each value of the fixed parameter. For simplicityassume that at the corners the following conditions holds:
okuoxk¼ 0;
okU
otk0¼ 0;
okW
otk0¼ 0; kþ 2k0 6 ½m� þ 2n;
okþk0 f ðx; tÞoxkotk0
¼ 0; kþ 2k0 6 ½m� þ 2n� 2;
where [m] is the integer part of the number m, m > 0, n P 0 is an integer and [m] + 2n P 0. Then the following estimate holds:
Lemma 4.5. Keeping x fixed along the line {(x,t):06 t 6 T}, time derivatives of the solution satisfies jut(x,t)j 6 C. Further, joiu(x,t)/otij 6 C for i = 0,1,2,3.
Proof. By mean value theorem, there is a t* in the interval (t,t + k) along the line {(x,t):0 6 t 6 T}, taking norm and using (4.4)leaves:
kutðx; t�Þk ¼uðx; t þ kÞ � uðx; tÞ
k
�������� 6 2kuðx; tÞk
k¼ C 00:
Bound on the second order derivative can be obtained easily by differentiate the equation and using the same steps. If weproceed inductively we immediately obtain:
joiuðx; tÞ=otij 6 C; for i ¼ 0;1;2;3: �
General estimates can be obtained using interior a priori estimates and estimates up to the boundary for the regular func-tion u(n,t) = u(x(n),t) with n = x/e, for (x,t) 2 D:
okþk0
oxkotk0uðx; tÞ
���������� 6 C=ek; kþ 2k0 6 2nþ 4; n P 0:
At each time step, better parameter uniform bounds can easily be obtained by extra evaluations of the differential oper-ator Le, that is, of the coefficients functions a, b and c that of the source term f. The theory is developed under the assumptionthat
Ra and a0 are known, but it is then shown that using discrete approximation to these, built on the same evaluations of a
are required. For the purpose of truncation analysis we require the following representation which can even be obtained un-der minimum assumption. First decompose the solution u as a sum u = v + w, where v satisfies:
v tðx; tÞ � �vxxðx; tÞ þ avxðx; tÞ þ cvðx; tÞ ¼ �bvðx; t � sÞ þ f ðx; tÞvðx; sÞ ¼ uðx; sÞ; x 2 X � ð0;1Þ; s 2 ½�s;0�;vð0; tÞ ¼ U; vð1; tÞ ¼ W; t 2 ð0; T�
and w satisfies :
wtðx; tÞ � �wxxðx; tÞ þ awxðx; tÞ þ cwðx; tÞ ¼ �bwðx; t � sÞ;wðx; sÞ ¼ 0; x 2 X � ð0;1Þ; s 2 ½�s;0�;wð0; tÞ ¼ U� vð0; tÞ; wð1; tÞ ¼ W� vð1; tÞ; t 2 ð0; T�:
Express v in the form of perturbation expansion:
v ¼ v0 þ v1 eþ þ vk�1 ek�1 þ Vk ek;
where the coefficients functions satisfy:
ov0ðx; tÞot
þ aov0ðx; tÞ
oxþ cv0ðx; tÞ ¼ �bv0ðx; t � sÞ þ f ðx; tÞ;
v0ðx; sÞ ¼ uðx; sÞ; x 2 X � ð0;1Þ; s 2 ½�s;0�;
and
ov jðx; tÞot
þ aov jðx; tÞ
oxþ cv jðx; tÞ ¼ �bv jðx; t � sÞ þ o2v j�1ðx; tÞ
ox2 ;
v j ¼ 0; ðx; tÞ 2 oD; j ¼ 1;2; . . . ; k� 1;

A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242 4237
and the remainder function Vk satisfies:
oVkðx; tÞot
� � o2Vkðx; tÞox2 þ a
Vkðx; tÞox
þ cVkðx; tÞ ¼ �bVkðx; t � sÞ þ o2vk�1
ox2
Vk ¼ 0; ðx; tÞ 2 oD:
The coefficients v0, v1, . . .,vk�1 are now independent of perturbation parameter. These coefficients now can be made assmooth as possible with a suitable choice of a, b, c and f. Further if we take:
y ¼ y0 þ y1eþ þ yk�1ek�1 þ Ykek;
and
z ¼ exp �1e
Za
� �ðz0 þ z1eþ þ zk�1ek�1 þ ZkekÞ;
as two linearly independent solution of the homogeneous equation Lew ¼ 0 where the coefficients yj and zj for j = 1,2, ,k � 1 are chosen appropriately, then we can prove for k = 0,1, . . .,k as in [23] that:
kvkj k 6 C; kyk
j k 6 C kzkj k 6 C; j ¼ 0;1; . . . ; k;
and
kVkkk ¼ OðekÞC; kYk
kkOðekÞ kZkkkOðekÞ:
The result follows immediately using boundary conditions. This section can finally be summarize in the following:
Theorem 4.6. Let a; b; c; f 2 Caþ2n�2ðDÞ; u 2 Caþ2nðDt¼0Þ and U; W 2 Caþ2nðDx2f0;1gÞ; a > 4;n P 0 and let the compatibilityconditions (4.1) are fulfilled. Then the solution of the porblem (3.1) admit the representation:
uðx; eÞ ¼ Aðx; eÞ þ Bðx; eÞexp1e
Z 1
xa;
� �ð4:5Þ
where A and B and their derivatives upto order k can be bounded on [0,1] independently of epsilon. Further it follows thatu; v ; w 2 Caþ2nðDÞ and that smooth and singular part satisfies for k + 2k0 6 2n + 4 (n P 0):
okþk0 vðx; tÞoxkotk0
���������� 6 C; and
okþk0 wðx; tÞoxkotk0
���������� 6 Ce�kexp � b
e
Za
� �: ð4:6Þ
5. Discretization
5.1. The Mesh
Define the rectangular mesh:
Mðh;kÞ ¼ Xh � ½0; T�Dt ;
where Xh ¼ XhðrÞ is possibly a non-uniform mesh in the spatial variable generated as follows. Let N P 4 be an even num-ber and set the mesh transition parameter r as r = min{0.5,r0e ln N} where r0 = H/b is a constant independent of � and Nand H P 3 for the convergence analysis. Divide the interval [0,1] into two subintervals [0,1 � r] and [1 � r,1] and wedefine:
Xh � f0 ¼ x0 < x1 < x2 < < xN=2 ¼ 1� r < < xN�1 < xN ¼ 1g;
where
xj ¼j 2ð1�rÞ
N for 0 6 j 6 N=2;ð1� rÞ þ ðj� N=2Þ 2r
N for N=2þ 1 6 i 6 N;
(
Let us denote hj = xj � xj�1. Obviously then:
hj ¼2ð1�rÞ
N for 0 6 i 6 N=2;2rN for N=2þ 1 6 i 6 N:
(
On time interval [0,T] a uniform mesh is placed with a constant step size Dt so that:
½0; T�Dt � f0 ¼ t0;Dt; . . . ; ðM � 1ÞDt;MDt ¼ Tg:

4238 A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242
5.2. Difference scheme
On the set of grid points Mðh;DtÞ ¼ Xh � ½0; T�Dt parabolic operator is now discretized by means of upwind finite differenceoperators defined as
DþD�unþ1j ¼ 2
hj þ hjþ1
unþ1jþ1 � unþ1
j
hjþ1�
unþ1j � unþ1
j�1
hj
!;
D�unþ1j ¼
unþ1j � unþ1
j�1
hj; Dþunþ1
j ¼unþ1
jþ1 � unþ1j
hjþ1:
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
1
2
3
4
5
6
x 1013
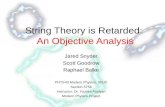
Fig. 2. Computed solutions of Example 1 for � = 0.01, with N = 128, M = 128 and s = 8�2.
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.5
1
1.5
2
2.5
x 104
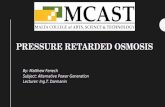
Fig. 1. Computed solutions of Example 1 for � = 0.01, with N = 128, M = 128 and s = 4�2.

A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242 4239
The discrete analog of (3.1) is thus defined as
L�unþ1j ¼ r�j unþ1
j�1 þ rcj unþ1
j þ rþj unþ1jþ1 ¼ rj; j ¼ 1;2; . . . ; N � 1; k; ð5:1aÞ
unþ10 ¼ Unþ1; unþ1
N ¼ Wnþ1; ð5:1bÞ
wherer�j ¼ �2eDt
ðhj þ hjþ1Þhj� ajDt
hj; rþj ¼ �
2eDtðhj þ hjþ1Þhjþ1
; rcj ¼
2eDthjhjþ1
þ ajDthjþ cjDt þ 1;
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
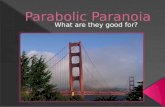
Fig. 4. Computed solutions of Example 2 for � = 0.01, with N = 128, M = 128 and s = 8�2.
00.2
0.40.6
0.81
0
0.2
0.4
0.6
0.8
10
0.2
0.4
0.6
0.8
1
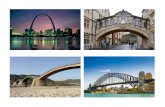
Fig. 3. Computed solutions of Example 2 for � = 0.01, with N = 128, M = 128 and s = 4�2.

4240 A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242
and
Table 2Compu
s; N
e = 00.004e2
8e2
e = 00.004e2
8e2
Table 1The ma
s; N
e = 00.004e2
8e2
e = 00.004e2
8e2
rj ¼ unj � bjDtunþ1�ks
j þ Dtf ðxj; tnþ1Þ:
It is an easy exercise to verify that difference scheme (5.1) is monotone by virtue of maximum principal and taken intoaccount the a-priori estimates.
Theorem 5.1. Let a; b; c; f 2 Caþ2n�2ðDÞ; u 2 Caþ2nðDt¼0Þ and U; W 2 Caþ2nðDx2f0;1gÞ; a > 4; n P 0 and let the compatibilityconditions (4.1) are fulfilled. Then the solution of the problem (5.1) converges e–uniformly to the solution of (3.1) and satisfy theerror estimate:
sup0<� 6 1kuN� � u�k1;XN
x6 CðN�1ðln NÞ2 þM�1Þ
where C is a constant independent of �.
6. Numerical computations
To examine the performance of the method, a set of numerical experiment is carried out. Choice of the range of theparameter � reflects our interests in the perturbed case. To illustrate the theory, we give some numerical results correspond-ing to the problem considered for various choices of parameters. In order to tabulate the maximum error and the order ofconvergence of the method, we use the double mesh principal. Maximum at all the mesh points are evaluated using theformula:
EN;Dt� ¼ max
0 6 i;j 6 N;MjuN;Dtðxi; tjÞ � u2N;Dt=2ðxi; tjÞj; EN;Dt ¼max
�EN;Dt� ;
where superscript indicates the number of mesh points used in the spatial direction, and tj = jDt and Dtis the time step fol-lowed by the tabulation of computed order of convergence pN
� , and the computed parameter uniform order of convergence pN
on the same lines, defined as
pN;Dt� ¼
log EN;Dt� =E2N;Dt=2
�
� �log 2
; pN;Dt ¼log EN;Dt=E2N;Dt=2
� �log 2
:
Example 1.
ut � �uxx ¼ �2e�suðx; t � tauÞ;uð0; tÞ ¼ e�t; uð1; tÞ ¼ e�ðtþ1=
ffiffiepÞ; 0 6 t 6 2;
and initial condition u0ðx;0Þ ¼ e�x=ffiffiep
0 6 x 6 1:
ted order of convergence for Example 1.
= M? 128 256 512 1024
.11.893085 1.807355 – –0.999903 0.999951 1.000097 –1.000554 1.000281 1.000132 –
.012.003573 2.001245 2.009621 –0.968840 0.984669 0.992399 –0.984586 0.992350 0.996197 –
ximum absolute error for Example 1.
= M? 128 256 512 1024
.10.00000026 0.00000007 0.00000002 0.000000000.00059422 0.00029713 0.00014857 0.000074280.00174365 0.00087149 0.00043566 0.00021781
.010.00018598 0.00020911 0.00000901 0.000002250.00324090 0.00165583 0.00083676 0.000420590.00647210 0.00327081 0.00164410 0.00082422

Table 3The maximum absolute error for Example 2.
s; N = M? 128 256 512 1024
e = 0.10.00 0.00101312 0.00050540 0.00025241 0.000126114e2 0.00104511 0.00051381 0.00025471 0.000126818e2 0.00116912 0.00054492 0.00026257 0.00012871
e = 0.010.00 0.00036986 0.00018894 0.00009551 0.000048024e2 0.00510560 0.00262231 0.00132892 0.000668918e2 0.01586523 0.00956033 0.00559999 0.00320191
Table 4Computed order of convergence for Example 2.
s; N = M? 128 256 512 1024
e = 0.10.00 1.003307 1.001657 1.001086 –4e2 1.024348 1.012379 1.006187 –8e2 1.101307 1.053342 1.028578 –
e = 0.010.00 0.969051 0.984204 0.992016 –4e2 0.961242 0.980584 0.990370 –8e2 0.730736 0.771636 0.806491 –
A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242 4241
Example 2.
ut � �uxx þ ux ¼ f ðx; tÞ;uð0; tÞ ¼ 0; uð1; tÞ ¼ 0; 0 6 t 6 T;
u0ðx;0Þ ¼ e�1=� þ ð1� e�1=�Þx� e�ð1�xÞ=ep 0 6 x 6 1:
7. Conclusion
There are two difficulties to approximate the solution of the problem because of the presence of the perturbation param-eter and that of the retarded argument. This leads to a breakdown in solution of the problem in the outflow boundary regionsand causes layer behavior. In order to overcome these difficulties, on a specially generated non-uniform mesh, a uniformlyconvergent numerical scheme using the standard finite difference upwind operator is proposed. Theoretical analysis is car-ried out in order to obtain the stability and error estimates. It was found, that the method proposed is unconditionally stableand the convergence obtained is parameter uniform. In the ideal case accuracy and the stability restrictions on the time stepshould be about the same. If the time step is much more restricted by stability than by accuracy, efficiency may be gained byswitching to a possibly more expansive but more stable time discretization. Further, the effect of perturbation parameter andthat of retarded argument on the layer behavior can be seen from Figs. 1–4. Maximum absolute error and computed order ofconvergence is tabulated in Tables 1–4.
References
[1] J. Wu, Theory and Applications of Partial Functional Differential Equations, vol. 1, Springer-Verlag, 1996.[2] J.K. Hale, S.M.V. Lunel, Introduction to Functional Differential Equations, vol. 99, Springer-Verlag, 1993.[3] R. Bellman, K.L. Cooke, Differential Difference Equations, Academic Press, New York, 1963.[4] L.E. El’sgol’s, S.V. Norkin, Introduction to the Theory and Application of Differential Equations with Deviating Arguments, Mathematics in Science and
Engineering, Academic Press, 1973.[5] V.B. Kolmanovskii, A. Myshkis, Applied Theory of Functional Differential Equations, vol. 85, MIA Kluwer Dordrecht, 1992.[6] V.B. Kolmanovskii, V.R. Nosov, Stability of Functional Differential Equations, Academic Press, New York, 1986.[7] O. Diekmann, S. van Gils, S. Verduyn Lunel, H.O. Walter, Delay Equations: Functional-, Complex and Nonlinear Analysis, Springer-Verlag, New York,
1995.[8] Y. Kuang, Delay Differential Equations with Applications in Population Dynamics, Academic Press, Boston, 1993.[9] R.B. Banks, Growth and diffusion phenomena: mathematical frameworks and applications, Texts in Applied Mathematics, vol. 14, Springer, Berlin,
1994.[10] J.M. Cushing, Integro-differential equations and delay models in population dynamics, Lecture Notes in Biomath, vol. 20, Springer, Berlin, 1977.[11] A. Halanay, Differential Equations: Stability, Oscillations, Time Lags, Academic Press, New York, 1966.[12] A. Asachenkov, G. Marchuk, R. Mohler, S. Zuev, Disease Dynamics, Birkhauser, Boston, 1994.[13] R.J. de Boer, A.S. Perelson, Size and connectivity as emergent properties of a developing network, J. Theor. Biol. 149 (1991) 381–424.

4242 A. Kaushik et al. / Applied Mathematical Modelling 34 (2010) 4232–4242
[14] K. Kumar, A. Kaushik, A solution of the discrepancy occurs due to using the fitted mesh approach rather than to the fitted operator for solvingsingularly perturbed differential equations, Appl. Math. Comput. 181 (2006) 756–766.
[15] A. Kaushik, Numerical Analysis of Initial Boundary Value Problems for Nonlinear Singularly Perturbed Parabolic Partial Differential Equations,Dissertation, Kurukshera University, 2007.
[16] A. Kaushik, Nonstandard perturbation approximation and travelling wave solutions of non-linear reaction diffusion equations, Numer. Meth. Part.Differ. Equat. 24 (1) (2008) 217–238.
[17] H.G. Roos, M. Stynes, L. Tobiska, Numerical Methods for Singularly Perturbed Differential Equations: Convection Diffusion and Flow Problems,Springer-Verlag, Berlin, 1996.
[18] A. Friedman, Partial Differential Equation of Parabolic Type, Prentice-Hall Englewood Cliffs, 1964.[19] O.A. Ladyzhenskaya, V.A. Solonnikov, N.N. Ural’tseva, Linear and quasilinear equations of parabolic type, Transactions of Mathematical Monographs,
vol. 23, American Mathematical Society, USA, 1968.[20] L. Bobisud, Second order linear parabolic equations with a small parameter, Arch. Ration. Mech. Anal. 27 (1967) 385–397.[21] E.A. Volkov, Differentiability properties of solutions of boundary value problems for the Laplace and Poisson equations, Proc. Steklov Inst. Math. 77
(1965) 101126.[22] O.A. Ladyzhenskaya, N.N. Uraltseva, Linear and Quasilinear Elliptic Equations, Academic Press, New York, 1968.[23] J.A. Cochran, On the uniqueness solutions of linear differential equation, J. Math. Anal. Appl. 22 (1968) 418–426.