
A new proposal in gradient plasticity: theory and application in 1-D quasi-statics and dynamics
18
* Correspondence to: H. P. Cherukuri, Department of Mechanical Engineering, UNC-Charlotte, 9201 University City Blvd, Charlotte, NC 28223-0001, U.S.A. E-mail: hcheruku@uncc.edu. CCC 1082-5010/99/020153— 18$17.50 Received 8 September 1997 Copyright ( 1999 John Wiley & Sons, Ltd. Revised 8 April 1998 MECHANICS OF COHESIVE-FRICTIONAL MATERIALS Mech. Cohes.-Frict. Mater. 4, 153— 170 (1999) A new proposal in gradient plasticity: theory and application in 1-D quasi-statics and dynamics Amit Acharya 1 , Harish P. Cherukuri 2 * and Rajesekaran M. Govindarajan 3 1 Center for Simulation of Advanced Rockets, University of Illinois at Urbana-Champaign, Urbana, IL 61801, U.S.A. 2 Department of Mechanical Engineering, UNC-Charlotte, 9201 University City Blvd, Charlotte, NC 28223-0001, U.S.A. 3 HKS, Inc., Pawtucket, RI 02860, U.S.A. SUMMARY It is well known that, due to the absence of an intrinsic length scale, conventional rate-independent plasticity theories fail to explain the size effects observed in problems such as shear-flow localization, nanoindentation tests and precipitate hardening. Consequently, several new nonlocal/gradient constitutive theories with a preferred-length scale have been proposed recently. One such gradient dependent J-2 flow theory of plasticity that preserves the classical structure of incremental boundary value problem has been proposed in Reference 27. The key feature of this theory that allows for the preservation of the classical structure of the incremental problem is the fact that the gradient measures enter the constitutive relations only through the hardening moduli and no higher-order stresses enter the formulation. This paper deals with a preliminary evaluation of the above theory in the context of two simple problems. The first problem considers quasistatic rate-independent motions of an infinite 1-D bar that is at the point of incipient softening at all points along its length. An analytical solution is provided to this problem and the stabilizing effect of the nonlocal theory is illustrated. The second problem considers 1-D, dynamic, simple-shearing motions of an infinite plate of finite thickness. Numerical results for both the nonclassical theory and the corresponding classical theory are presented. Comparisons show that the non-classical theory predicts a stabilizing trend in the motions and mesh-size insensitivity of the results. Copyright ( 1999 John Wiley & Sons, Ltd. KEY WORDS: non-local plasticity; gradient plasticity; rate-independent plasticity; hardening function; shearband 1. INTRODUCTION Significant examples of material length-scale-dependent phenomena in the plastic deformation of solids emphatically prove the need for constitutive modelling techniques that take into account some representation of the physical mechanisms that cause such phenomena. In the context of the deformation of metals, some such examples are (a) the increase in inferred hardness in nanoinden- tation tests with a decrease in indentation size from roughly below tens of microns to fractions of a micron,1,2 (b) the increase in overall hardness of metals containing hard particles, as the size of those particles decreases with the overall volume fraction held fixed,3 (c) the patterning of coarse-slip microstructures4,5 and (d) the ‘Hall —petch’ effect demonstrating the grain size dependence of flow stress in polycrystals.
-
Upload
amit-acharya -
Category
Documents
-
view
212 -
download
0
Transcript of A new proposal in gradient plasticity: theory and application in 1-D quasi-statics and dynamics

*Correspondence to: H. P. Cherukuri, Department of Mechanical Engineering, UNC-Charlotte, 9201 University CityBlvd, Charlotte, NC 28223-0001, U.S.A. E-mail: [email protected].
CCC 1082-5010/99/020153—18$17.50 Received 8 September 1997Copyright ( 1999 John Wiley & Sons, Ltd. Revised 8 April 1998
MECHANICS OF COHESIVE-FRICTIONAL MATERIALS
Mech. Cohes.-Frict. Mater. 4, 153—170 (1999)
A new proposal in gradient plasticity: theory and application in1-D quasi-statics and dynamics
Amit Acharya1, Harish P. Cherukuri2* and Rajesekaran M. Govindarajan3
1 Center for Simulation of Advanced Rockets, University of Illinois at Urbana-Champaign, Urbana, IL 61801, U.S.A.2 Department of Mechanical Engineering, UNC-Charlotte, 9201 University City Blvd, Charlotte, NC 28223-0001, U.S.A.
3 HKS, Inc., Pawtucket, RI 02860, U.S.A.
SUMMARY
It is well known that, due to the absence of an intrinsic length scale, conventional rate-independent plasticitytheories fail to explain the size effects observed in problems such as shear-flow localization, nanoindentationtests and precipitate hardening. Consequently, several new nonlocal/gradient constitutive theories witha preferred-length scale have been proposed recently.
One such gradient dependent J-2 flow theory of plasticity that preserves the classical structure ofincremental boundary value problem has been proposed in Reference 27. The key feature of this theory thatallows for the preservation of the classical structure of the incremental problem is the fact that the gradientmeasures enter the constitutive relations only through the hardening moduli and no higher-order stressesenter the formulation.
This paper deals with a preliminary evaluation of the above theory in the context of two simple problems.The first problem considers quasistatic rate-independent motions of an infinite 1-D bar that is at the pointof incipient softening at all points along its length. An analytical solution is provided to this problemand the stabilizing effect of the nonlocal theory is illustrated. The second problem considers 1-D,dynamic, simple-shearing motions of an infinite plate of finite thickness. Numerical results for both thenonclassical theory and the corresponding classical theory are presented. Comparisons show that thenon-classical theory predicts a stabilizing trend in the motions and mesh-size insensitivity of the results.Copyright ( 1999 John Wiley & Sons, Ltd.
KEY WORDS: non-local plasticity; gradient plasticity; rate-independent plasticity; hardening function; shearband
1. INTRODUCTION
Significant examples of material length-scale-dependent phenomena in the plastic deformationof solids emphatically prove the need for constitutive modelling techniques that take into accountsome representation of the physical mechanisms that cause such phenomena. In the context of thedeformation of metals, some such examples are (a) the increase in inferred hardness in nanoinden-tation tests with a decrease in indentation size from roughly below tens of microns to fractionsof a micron,1,2 (b) the increase in overall hardness of metals containing hard particles, as thesize of those particles decreases with the overall volume fraction held fixed,3 (c) the patterningof coarse-slip microstructures4,5 and (d) the ‘Hall—petch’ effect demonstrating the grainsize dependence of flow stress in polycrystals.
A first step in the direction of mechanistic modeling of length-scale-dependent phenomena inthe plastic response of solids was made in the work of Aifantis6~10 and in his collaborations withZbib,11~13 Bammann,14 Muhlhaus15,16 and Vardoulakis.17 Aifantis’ work, in turn, was moti-vated by his work in the equilibrium mechanical theory of fluid interfaces with Serrin.18,19 Thisapproach, in essence, is based on a modification of the conventional flow stress by an explicitdependence on the gradients of internal variables relevant to the problem. A critical review of thework based on this approach can be found in Reference 9. This approach has also been the subjectof detailed numerical investigations in the works of de Borst and Muhlhaus,20 de Borst et al.21and Sluys and de Borst.22 While the work of Aifantis and this co-workers has been primarilybased on a second-gradient of equivalent plastic strain modification of the flow stress, Schreyerand Chen23 and Schreyer24 have proposed, within the framework of augmenting the flow stressby an explicit dependence on gradients, a first-gradient theory.
A second approach to the problem of describing length-scale-dependent phenomena is plastic-ity is presented in the work of Fleck and Hutchinson25 and Fleck et al.,26 where a strain-gradientplasticity theory involving couple-stress is introduced, based on motivation from dislocationtheory.
A third approach to the problem is proposed in the work of Acharya and Bassani27 where,motivated by a suggestion presented in Acharya and Shawki,28 gradient measures are includedonly in the hardening functions of otherwise classical J-2 and crystal plasticity theories and nohigher-order stresses are postulated.
Apart from the above proposals, several other conceptually distinct approaches have been putforward to address the problem of modelling material length-scale-dependent plastic response.The works of Eringen,29 Bazant,30 Bazant and Pijaudier-Cabot,31 Pijaudier-Cabot andBenallal,32 and Tvrgaard and Needleman33 utilize an integral representation of nonlocal plasticor damage response. The work of Naghdi and Srinivasa,34,35 Acharya and Bassani,36 and Le andStumpf37 introduce non-local effects in the form of gradients of plastic deformation based onmotivation from the theory of continuous distribution of dislocations. The general theories inReferences 34, 35 and 37 involve higher-order stresses. However, a special class of constitutiveassumptions in the theories of Naghah and Srinivasa35 and Acharya and Bassani36 avoids theissue of higher-order stresses and a dependence of the free-energy on gradients of plastic strain byarguments that find justification in thermodynamics.
This paper deals with a preliminary evaluation of a J-2 gradient flow theory presented inReference 27 through the solution of two simple problems. The paper is organized as follows: InSection 2 we review the general idea behind a constitutive structure presented in Reference 28 anddiscuss some of its features in comparison to the other gradient plasticity proposals mentionedabove. The J-2 gradient flow theory is presented next, and this model is used to pose an idealized,non-linear, 1-D, quasi-static problem that is solved anaytically in Section 3, and a non-linear,1-D, dynamic problem that is solved numerically in Section 4. The intent of the quasi-staticproblem is to display the stabilizing effect of the model in strain-softening situations; that of thedynamic problem is to illustrate the stabilizing trend in localizing deformations introduced by thetheory, and the mesh-size insensitivity of the numerical results.
2. A DISCUSSION OF THE CONSTITUTIVE STRUCTURE
We begin by illustrating the basic features of the proposed constitutive structure througha general discussion. Let G denote a suitable gradient measure (in fact, G could be an integral
154 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

nonlocal measure), dictated by the physics of the phenomenon being modeled and let S denotea collection of state variables. Let F be the deformation gradient, / the yield function, ¹K theconstitutive function for stress, and ¹ the Cauchy stress. Then the gradient dependentconstitutive structure reads
¹"¹K (F, S ) (1)
SQ "jSK (F, S, G) (2)
j"
0 if / (F, S)(0 or /(F, S )"0 andL/LF
)FQ (0
(L/ )/(LF) )FQ!(L//LS) )SK (F, S, G)
if / (F, S )"0 andL/
LF)FQ '0
(3)
The thermodynamic consistency of the structure above is proven in Reference 28, in the case ofG being a second deformation gradient dependence. However, with the dependencies of thefunction ¹K and / above, it is a simple matter to extend the results in that paper to the case ofG being characterized by an arbitrary non-local measure. At this point we make a special note ofthe fact that, unlike the thermodynamics of elasticity, higher gradients are thermodynamicallyadmissible in the constitutive structure of inelasticity without the requirement that higher-orderstresses be supported by the material. It is also clear from the above-mentioned structure that theconstitutive equation for the stress-rate (first Piola—Krichhoff) is homogeneous of degree one inthe deformation gradient rate, and consequently the classical prescription (order of equations,boundary conditions) of the incremental problem of equilibrium38~40 is valid for material modelsthat fall within this constitutive structure, a feature that is in sharp contrast with theories thatintroduce nonlocal effects by an explicit dependence of the flow stress on gradients or integralterms and one that can be exploited gainfully in adapting classical numerical strategiesfor the solution of problem with the present theory. Another distinguishing feature of thecurrent proposal from theories with an explicitly gradient-dependent flow stress is the nature ofthe loading/unloading conditions and the method for determining the plastic multiplier, while inthe current proposal these conditions are identical to those of the classical theory, theybecome quite complicated in the latter case (the reader interested in these issues is referred toReference 27).
Not withstanding the above-mentioned simplicities inherent in the use of the currentconstitutive structure, we mention here that the issue of determining the required boundaryconditions for the total problem, as opposed to the rate problem of equilibrium, thatare consistent with this constitutive structure is a deep question in mathematical analysisand the philosophical content of the meaning of ‘internal variables’, and demands furtherstudy. However, the simplicity of the rate problem allows the formulation of numerical schemeswhich can generate approximate solutions to the total problem without any extra boundaryconditions on the internal variables as well as the displacement and stress fields, and till suchtime as a clear mathematical resolution of this issue is available, we proceed on the premisethat the generated solutions can be accepted as legitimate, as long as they are physicallyreasonable.
Having discussed some of the general issues relevant to the current constitutive proposal, wedeal with a specific gradient J-2 flow theory in the rest of the paper. The measure G is taken to beD+cD , where c is the equivalent plastic strain and the constitutive specification for the loading
NEW PROPOSAL IN GRADIENT PLASTICITY 155
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

branch of the model reads as27
J12p@ )p@"q (4)
q5 "H(c, G)cR (5)
D1"AcR2qBp@ (6)
p+"C(D!D1) (7)
where p is the Cauchy stress tensor, p@ its deviator and p+ a suitable objective stress rate, q is thenon-local flow stress in shear which is dependent on the history of the G but not on its value at thepresent time, c is the equivalent plastic strain which is work conjugate to q, D is rate ofdeformation tensor, D1 is the plastic part of the rate of deformation, and C is the tensor ofincremental elastic moduli. We mention here in passing that the first gradient measure chosen toreflect the non-local nature of the material model is inspired by the theory of continuousdistribution of dislocations (TCDD) where the tensor of dislocation density is characterized bythe first gradient of the inverse elastic deformation, which in turn is related to the first gradient ofthe plastic deformation.
The tensor of dislocation density in TCDD41~44 arises in connection with the mathematicalmodelling of defects in the lattice structure, in particular dislocations. It is a commonly acceptednotion in the elasticity theory of dislocations that the elastic deformation, in the presence ofa dislocation in the lattice, is not integrable in the sencse that there does not exist a displacementfield whose deformation gradient matches the elastic deformation gradient. The strength of thisnon-integrability is measured by a surface density called the dislocation density. In Reference 43this density is characterized by certain skew gradients of the inverse elastic deformation, thusresulting in a first-gradient measure of lattice defects. Since it is well-know that lattice defectsimpede plastic flow, such a measure finds a natural place in the hardening response of thematerial. A detailed analysis of the connections between the TCDD and the modern theory ofcrystal plasticity is presented in Acharya and Bassani.45
3. EXAMPLE PROBLEM 1: ANALYTICAL SOLUTION TO A SIMPLE PROBLEM
In this section, we consider the quasi-static deformation of an infinite 1-D bar which has beenstretched to the point of incipient softening at all points along its length. The bar is assumed tohave an inhomogeneous initial yield stress profile so that an inhomogeneous plastic strain profilecan be supported in it when it is deformed from the virgin state. It is also assumed that, in a programof monotonic stretching, the classical stress—strain curves for material points along the length of thebar are such that each point along the length attains the peak of its stress—strain curve at the samestress level, and this peak is attained uniformly over the body with an inhomogeneousdistribution of plastic strain. In addition, we assume that nonlocal effects have not affected theresponse of any material point in the hardening phase of the response. With these idealizedcircumstances in hand, an analytical solution to the plastic strain distribution is providedutilizing a small version of the gradient plasticity model presented in the previous section.
Equilibrium of the bar requires
p,x"0 (8)
156 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

The constitutive equations are
p"E (e!e1) (9)
eR 1"pRH
(10)
H"
H#-
1!H/#-(11)
where e1 is the plastic strain, H#- is the classical hardening modulus (assumed to be negative andconstant in this case) and H/#- is the non-local hardening modulus. We also assume that for allvalues of interest, 1'H/#-'0.
Clearly equation (8) implies that
p (t)"p0!C(t) (12)
where p0
is the stress in the bar at time t"0. When H/#-,0, it can be seen that C(t) isa monotonically increasing, positive function of time, assuming increasing stretch in the bar. Forthe case of H/#-I0 we make this assumption a priori, with the understanding that any solutionwould have to be checked for the satisfaction of this condition (that the condition can indeed torealized for certain values of the parameters in the problem is demonstrated in the followingthrough a solution for which 0(H/#-(1 and eR 1'0 for all times). For the sake of convenience,we treat !(p (t)!p
0) as an independent variable in place of t in the following. This is acceptable
since p is a monotonically decreasing, continuous function of only t. Then the equation governingthe evolution of the plastic strain becomes
Le1Lp6
"
1!H/#-
DH#- D(13)
where p6 "!(p(t)!p0). Let us assume the following specific form for H/#- :
H/#-"Gl
hH1`m
( De1,x
D )1`m, m'0 (14)
where l is a length-scale intrinsic to the material and h is a characteristic length of the specimenused for non-dimensionalizing x. Clearly, H/#- is a convex function of e1
,x. Let the initial condition
be e1(x, 0)"e10(x). Let us now assume that the solution consists of a homogeneously evolving
part and an inhomogeneously evolving part:
e1(x, pN )"e11(pN )#e1
2(x, pN ) (15)
with
Le11
Lp6"
1
DH#- D, e1
1(pN "0)"0 (16)
Le12
Lp6"!G
l
hH1`m 1
DH#- D( De1
,xD )1`m :"!f (e1
,x) , e1
2(x, pN "0)"e1
0(x) (17)
NEW PROPOSAL IN GRADIENT PLASTICITY 157
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Clearly, e1(x, pN ) as defined by equation (15) satisfies equation (13). The solution is e11(t) is trivial
and given by
e11(p6 )"
p6DH#- D
(18)
Since e11
is homogeneous in x, we note that we can write equation (17) as
Le12
Lp6#f (e1
2,x)"0 (19)
The above equation belongs to the class of non-linear equations of the form uR #f (ux)"0, where
f is convex. Assuming the existence of a strong solution to the problem, Lax46 characterizes thesolution to the class by the remarkable formula (see appendix for details)
u (x, t)"miny Cu
0(y)#t f *A
x!y
t BD (20)
where f * is the Legendre—Fenchel transform of f :
f * (w)"maxa
[aw!f (a)]"[ f @~1 (w)w!f ( f @~1 (w))] (21)
Following this, the solution to equation (17) is given by
e12(x, pN )"min
y Ce10(y)#pN f *A
x!y
p BD (22)
For the case being considered,
f (a)"Gl
hH1`m 1
DH#- DDa D1`m (23)
f @(a)"Gl
hH1`m 1#m
DH#- DDaDm sign(a) (24)
f @~1(w)"Gl
mH~(1`m)@m
CDw D DH#- D(1#m) D
1@msign(w) (25)
so that
e12(x, pN )"min
y Ce10(y)#G
l
hH~(1`m)@m
AmpN
1#mB Kx!y
pN K1`1@m
ADH#- D1#mB
1@m
D (26)
The total plastic strain is then obtained from equation (15) as
e1(x, pN )"pN
DH#- D#min
y Ce10(y)#G
l
hH~(1`m)@m
AmpN
1#mB Kx!y
pN K1`1@m
ADH#- D1#mB
1@m
D (27)
It is interesting to evaluate the limits, l/hP0 and l/hPR, in the above solution, for the case ofe11(x) being a Gaussian profile of arbitrary magnitude centred at 0. Clearly,
liml@h?=
e1(x, pN )"p6
DH#- D#e1
0(x) (28)
158 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
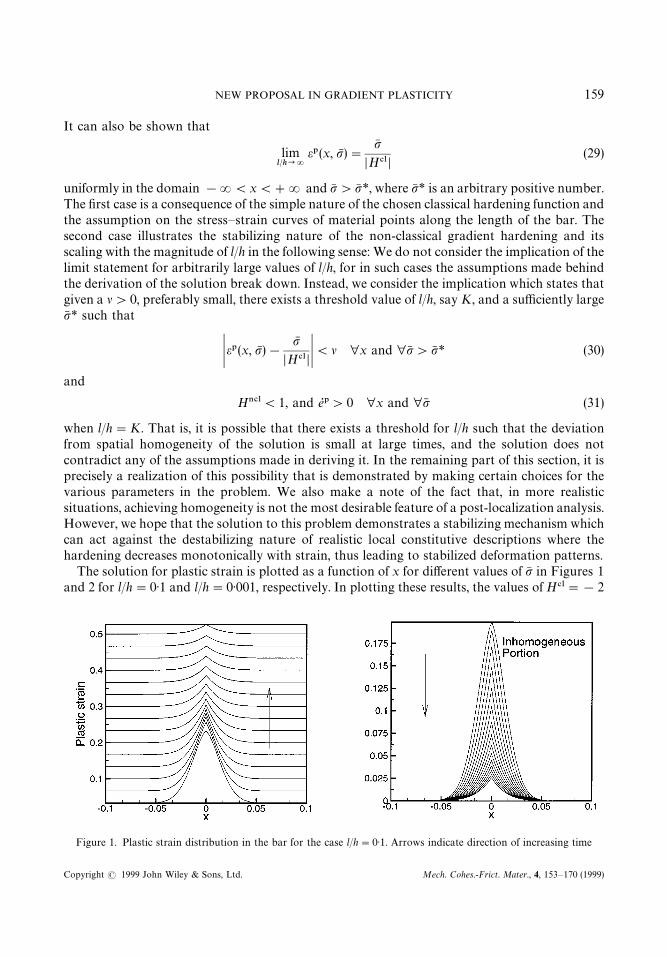
Figure 1. Plastic strain distribution in the bar for the case l/h"0)1. Arrows indicate direction of increasing time
It can also be shown that
liml@h?=
e1(x, pN )"p6
DH#- D(29)
uniformly in the domain !R(x(#R and p6 'p6 *, where p6 * is an arbitrary positive number.The first case is a consequence of the simple nature of the chosen classical hardening function andthe assumption on the stress—strain curves of material points along the length of the bar. Thesecond case illustrates the stabilizing nature of the non-classical gradient hardening and itsscaling with the magnitude of l/h in the following sense: We do not consider the implication of thelimit statement for arbitrarily large values of l/h, for in such cases the assumptions made behindthe derivation of the solution break down. Instead, we consider the implication which states thatgiven a l'0, preferably small, there exists a threshold value of l/h, say K, and a sufficiently largep6 * such that
Ke1(x, pN )!pN
DH#- D K(l ∀x and ∀p6 'p6 * (30)
and
H/#-(1, and eR 1'0 ∀x and ∀p6 (31)
when l/h"K. That is, it is possible that there exists a threshold for l/h such that the deviationfrom spatial homogeneity of the solution is small at large times, and the solution does notcontradict any of the assumptions made in deriving it. In the remaining part of this section, it isprecisely a realization of this possibility that is demonstrated by making certain choices for thevarious parameters in the problem. We also make a note of the fact that, in more realisticsituations, achieving homogeneity is not the most desirable feature of a post-localization analysis.However, we hope that the solution to this problem demonstrates a stabilizing mechanism whichcan act against the destabilizing nature of realistic local constitutive descriptions where thehardening decreases monotonically with strain, thus leading to stabilized deformation patterns.
The solution for plastic strain is plotted as a function of x for different values of p6 in Figures 1and 2 for l/h"0)1 and l/h"0)001, respectively. In plotting these results, the values of H#-"!2
NEW PROPOSAL IN GRADIENT PLASTICITY 159
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
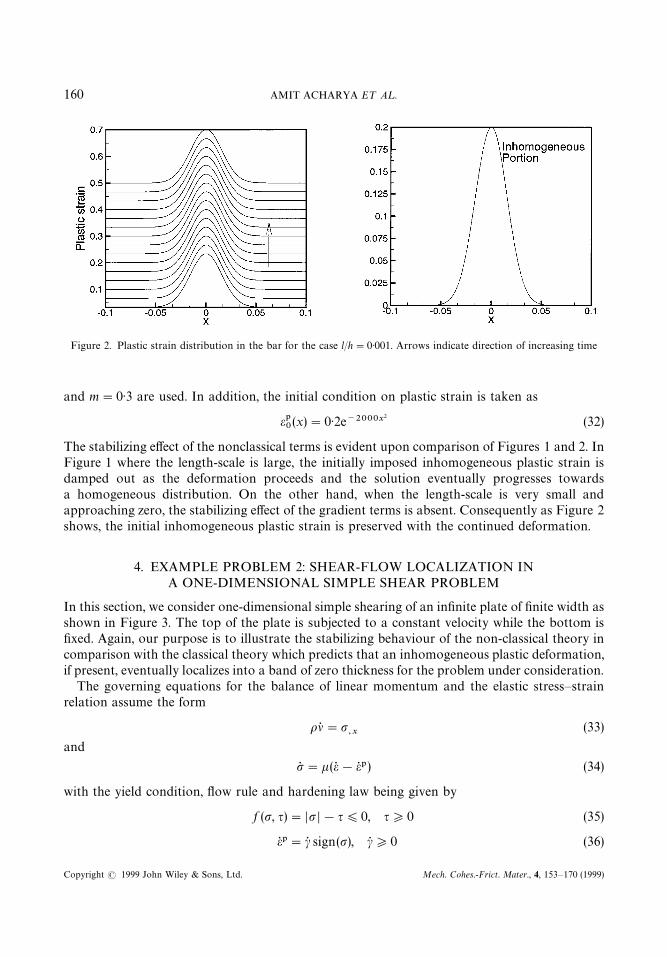
Figure 2. Plastic strain distribution in the bar for the case l/h"0)001. Arrows indicate direction of increasing time
and m"0)3 are used. In addition, the initial condition on plastic strain is taken as
e10(x)"0)2e~2000x2 (32)
The stabilizing effect of the nonclassical terms is evident upon comparison of Figures 1 and 2. InFigure 1 where the length-scale is large, the initially imposed inhomogeneous plastic strain isdamped out as the deformation proceeds and the solution eventually progresses towardsa homogeneous distribution. On the other hand, when the length-scale is very small andapproaching zero, the stabilizing effect of the gradient terms is absent. Consequently as Figure 2shows, the initial inhomogeneous plastic strain is preserved with the continued deformation.
4. EXAMPLE PROBLEM 2: SHEAR-FLOW LOCALIZATION INA ONE-DIMENSIONAL SIMPLE SHEAR PROBLEM
In this section, we consider one-dimensional simple shearing of an infinite plate of finite width asshown in Figure 3. The top of the plate is subjected to a constant velocity while the bottom isfixed. Again, our purpose is to illustrate the stabilizing behaviour of the non-classical theory incomparison with the classical theory which predicts that an inhomogeneous plastic deformation,if present, eventually localizes into a band of zero thickness for the problem under consideration.
The governing equations for the balance of linear momentum and the elastic stress—strainrelation assume the form
ol5 "p,x
(33)
and
p5 "k (e5!e5 1) (34)
with the yield condition, flow rule and hardening law being given by
f (p, q)"DpD!q)0, q*0 (35)
e5 1"c5 sign(p), c5 *0 (36)
160 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
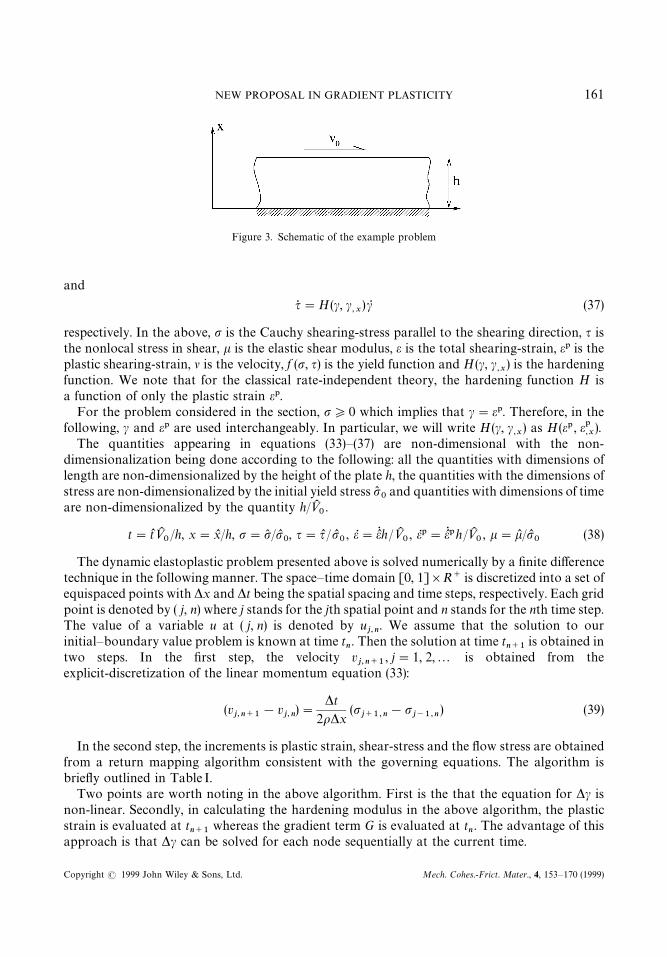
Figure 3. Schematic of the example problem
and
q5 "H(c, c,x
)cR (37)
respectively. In the above, p is the Cauchy shearing-stress parallel to the shearing direction, q isthe nonlocal stress in shear, k is the elastic shear modulus, e is the total shearing-strain, e1 is theplastic shearing-strain, l is the velocity, f (p, q) is the yield function and H(c, c
,x) is the hardening
function. We note that for the classical rate-independent theory, the hardening function H isa function of only the plastic strain e1.
For the problem considered in the section, p*0 which implies that c"e1. Therefore, in thefollowing, c and e1 are used interchangeably. In particular, we will write H(c, c
,x) as H(e1 , e1
,x).
The quantities appearing in equations (33)—(37) are non-dimensional with the non-dimensionalization being done according to the following: all the quantities with dimensions oflength are non-dimensionalized by the height of the plate h, the quantities with the dimensions ofstress are non-dimensionalized by the initial yield stress p
0and quantities with dimensions of time
are non-dimensionalized by the quantity h/»K0.
t"tL »K0/h, x"xL /h, p"p/pL
0, q"qL /pL
0, eR"eLQ h/»K
0, eR 1"eLQ 1h/»K
0, k"kL /pL
0(38)
The dynamic elastoplastic problem presented above is solved numerically by a finite differencetechnique in the following manner. The space—time domain [0, 1]]R` is discretized into a set ofequispaced points with *x and *t being the spatial spacing and time steps, respectively. Each gridpoint is denoted by ( j, n) where j stands for the jth spatial point and n stands for the nth time step.The value of a variable u at ( j, n) is denoted by u
j,n. We assume that the solution to our
initial—boundary value problem is known at time tn. Then the solution at time t
n`1is obtained in
two steps. In the first step, the velocity vj,n`1
, j"1, 2,2 is obtained from theexplicit-discretization of the linear momentum equation (33):
(vj,n`1
!vj,n
)"*t
2o*x(p
j`1,n!p
j~1,n) (39)
In the second step, the increments is plastic strain, shear-stress and the flow stress are obtainedfrom a return mapping algorithm consistent with the governing equations. The algorithm isbriefly outlined in Table I.
Two points are worth noting in the above algorithm. First is the that the equation for *c isnon-linear. Secondly, in calculating the hardening modulus in the above algorithm, the plasticstrain is evaluated at t
n`1whereas the gradient term G is evaluated at t
n. The advantage of this
approach is that *c can be solved for each node sequentially at the current time.
NEW PROPOSAL IN GRADIENT PLASTICITY 161
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Table I. Return-mapping algorithm for the simple-shearproblem
f Compute the strain increment *ej,n`1
:
*ej,n`1
:"ALv
LxBj,n`1
*t
f Compute the trial state:
p53*!-j,n`1
"pj,n
#k*ej,n`1
, f 53*!-j,n`1
"Dp53*!-j,n`1
D!qj,n
f If f 53*!-j,n`1
)0, then elastic step, i.e., set
e1j,n`1
"e1j,n
, pj,n`1
"p53*!-j,n`1
and qj,n`1
"qj,n
f If f 53*!-j,n`1
'0, then plastic step, i.e., set
*c :"f 53*!-j,n`1
k#H(cj,n`1
, Gj,n
)
e1j,n`1
"e1j,n
#*csign(p53*!-j,n`1
)
pj,n`1
"p53*!-j,n`1
!k*csign(p53*!-j,n`1
)
and
qj,n`1
"qj,n
#H(cj,n`1
, Gj,n
)*c
The time step is chosen so that the following Courant condition for elastic wave propagation issatisfied:
C4*t)2*x, where C
4"S
ko
(40)
The rationale behind assuming the validity of the above condition for the present problem is thatit is precisely the condition that is necessary and sufficient for the stability of the explicit differencescheme for the system of equations obtained by freezing the variable coefficients in the governingequations for our problem when the hardening modulus H is positive. The factor 2 is the Courantcondition arises from the fact that updated values of the velocity are used in computing theincrements of the other field variables.
4.1. Numerical results
A new numerical results illustrating the effect of the nonlocal hardening function H(e1 , e1,x
) (seeequation (37)) are presented in this section. The hardening function H, assumed to be an additivecomposition of a classical part H#-(e1) and a nonclassical part H/#-(e1 , e1
,x) , is taken to be of the
following specific form:
H (e1 , e1,x
) :"H#-(e1 )# H/#-(e1 , e1,x
) "!2)7(2e1!0)7)#aGn
(1#e14#G4)1@4
(41)
where G"l De1,x
D with l being a suitable non-dimensional length scale. The constants a and n aretaken to be equal to 0)3 and 0)3, respectively. Note that for homogeneous deformations whereG"0, the non-local hardening function reduces to the classical hardening function.
162 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Localization of the deformation is classical theory is typically initiated by the presence of aninhomogeneity in a field variable or geometry. In this section, we assume that the material hasa lower initial yield stress at x"0)5. Specifically, we assume that the initial yield stress for theplate is given by the expression
q(x, 0)"1!e25(x~0)65), x)0)5 (42)
For x'0)5, the yield stress is assumed to be symmetrically distributed about x"0)5. In thefollowing, we present the numerical results only for the region x)0)5. In addition to the aboveinitial condition on the yield stress, the initial conditions on the other field variables are taken tobe of the form:
v (x, 0)"x (43)
e1(x, 0)"0)0 (44)
p(x, 0)"0)5 (45)
The effect of non-local hardening function on the simple shearing motions of the infinite plateis illustrated through the results for the classical and non-classical theories. The classicalproblem is solved by setting the H/#- term in equation (41) to zero. In both the cases, a value of*x"0)005 is used. The time step is chosen so that the convergence of the results is obtainedfor a given mesh.
In comparing the classical and nonclassical results, calculations were carried out till the time atwhich the solution ceases to be meaningful because of either numerical reasons, as in thenonclassical case, or physical reasons, as in the classical case. In the classical case, during thehardening phase of a given material point, the governing equations are hyperbolic and well-posed. At the onset of softening however, the governing equations become elliptic locally whichcauses the deformation to be trapped in the softening region. Numerically, this manifests itself aslocalization of deformation into one-mesh spacing (i.e., mesh dependency) and the appearance ofnonphysical oscillations in the stress and velocity field variables. Therefore, when comparing theclassical results with the nonclassical results, the classical results were shown only till the time atwhich the first occurrence of softening (at the weakest point in the material, i.e., at x"0)5 for theinitial condition (42)) takes place.
In the nonclassical case, the maximum time to which the computations were carried out wastaken to be the time at which H becomes negative. As with the classical case, a change of type ofgoverning equations occurs in the nonclassical case when H becomes negative. However, in theclassical case, H"H#- becomes negative at the center (x"0)5) first. In the nonclassical case, thishappens away from the center due to the following reason. At x"0)5 where the material is theweakest, the nonlocal contribution to the total hardening H is insignificant at small times.However, as the plastic-strain gradient increases, the contribution of H/#- to H increases while atthe same time, the contribution of H#- is decreasing. As a consequence, at x"0)5, H becomesnegative at a later time in the nonclassical case compared with the classical case. However, awayfrom the center where the gradients are small, the total hardening is entirely due to the classicalterm H#-. Eventually, when H#- approaches zero, any small numerical perturbations that arepresent grow rapidly and spurious localization of deformation appears to take place at the pointwhere these numerical perturbations are the strongest. This is clearly nonphysical and isattributed to the inability of the numerical scheme to handle the change of type of the governingequations. However, we emphasize the fact that in the non-classical case the deformation
NEW PROPOSAL IN GRADIENT PLASTICITY 163
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
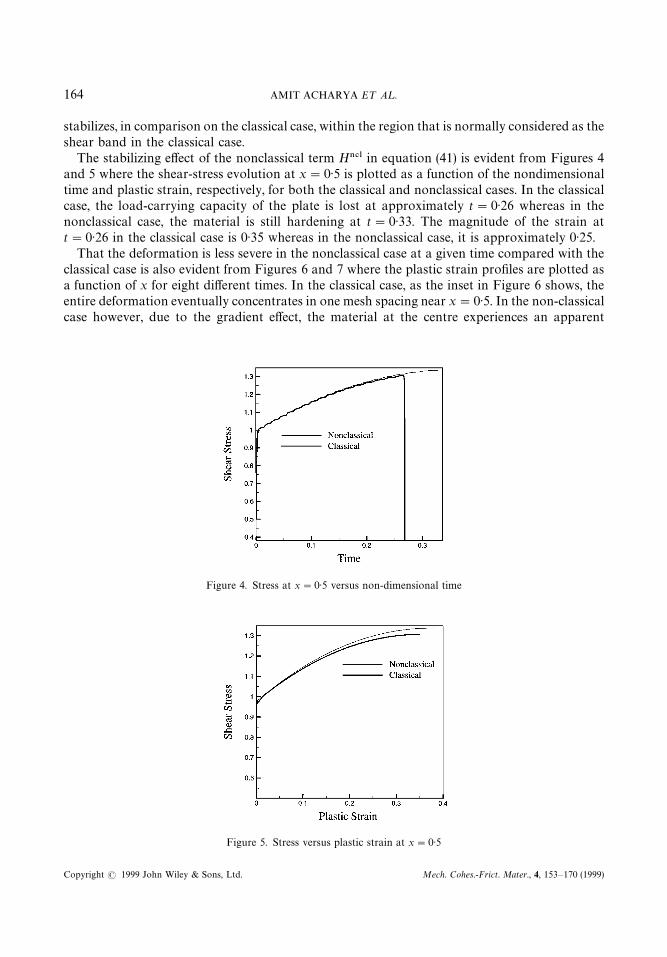
Figure 5. Stress versus plastic strain at x"0)5
Figure 4. Stress at x"0)5 versus non-dimensional time
stabilizes, in comparison on the classical case, within the region that is normally considered as theshear band in the classical case.
The stabilizing effect of the nonclassical term H/#- in equation (41) is evident from Figures 4and 5 where the shear-stress evolution at x"0)5 is plotted as a function of the nondimensionaltime and plastic strain, respectively, for both the classical and nonclassical cases. In the classicalcase, the load-carrying capacity of the plate is lost at approximately t"0)26 whereas in thenonclassical case, the material is still hardening at t"0)33. The magnitude of the strain att"0)26 in the classical case is 0)35 whereas in the nonclassical case, it is approximately 0)25.
That the deformation is less severe in the nonclassical case at a given time compared with theclassical case is also evident from Figures 6 and 7 where the plastic strain profiles are plotted asa function of x for eight different times. In the classical case, as the inset in Figure 6 shows, theentire deformation eventually concentrates in one mesh spacing near x"0)5. In the non-classicalcase however, due to the gradient effect, the material at the centre experiences an apparent
164 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
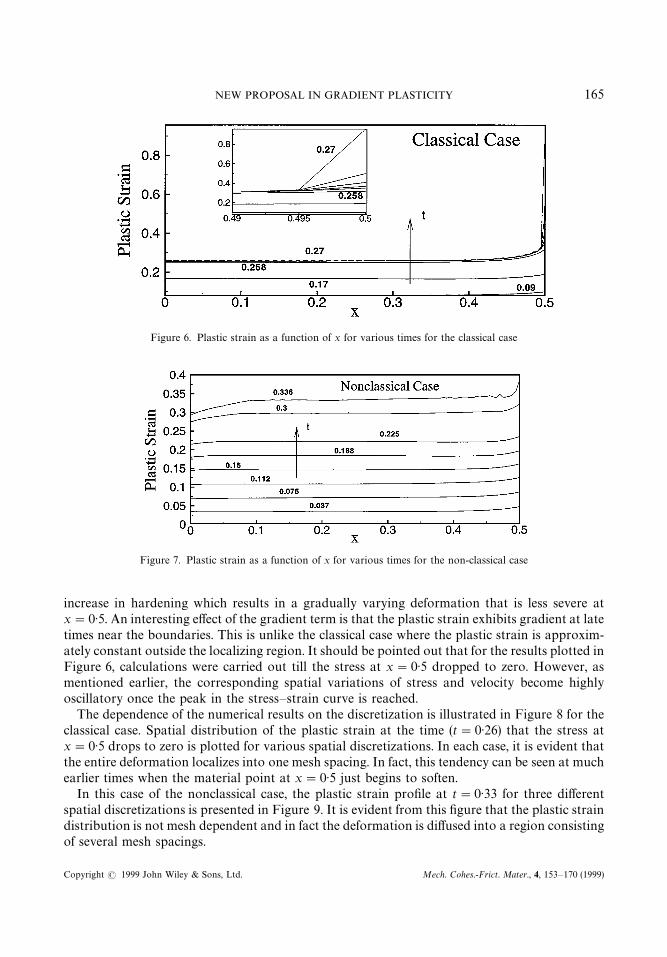
Figure 6. Plastic strain as a function of x for various times for the classical case
Figure 7. Plastic strain as a function of x for various times for the non-classical case
increase in hardening which results in a gradually varying deformation that is less severe atx"0)5. An interesting effect of the gradient term is that the plastic strain exhibits gradient at latetimes near the boundaries. This is unlike the classical case where the plastic strain is approxim-ately constant outside the localizing region. It should be pointed out that for the results plotted inFigure 6, calculations were carried out till the stress at x"0)5 dropped to zero. However, asmentioned earlier, the corresponding spatial variations of stress and velocity become highlyoscillatory once the peak in the stress—strain curve is reached.
The dependence of the numerical results on the discretization is illustrated in Figure 8 for theclassical case. Spatial distribution of the plastic strain at the time (t"0)26) that the stress atx"0)5 drops to zero is plotted for various spatial discretizations. In each case, it is evident thatthe entire deformation localizes into one mesh spacing. In fact, this tendency can be seen at muchearlier times when the material point at x"0)5 just begins to soften.
In this case of the nonclassical case, the plastic strain profile at t"0)33 for three differentspatial discretizations is presented in Figure 9. It is evident from this figure that the plastic straindistribution is not mesh dependent and in fact the deformation is diffused into a region consistingof several mesh spacings.
NEW PROPOSAL IN GRADIENT PLASTICITY 165
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
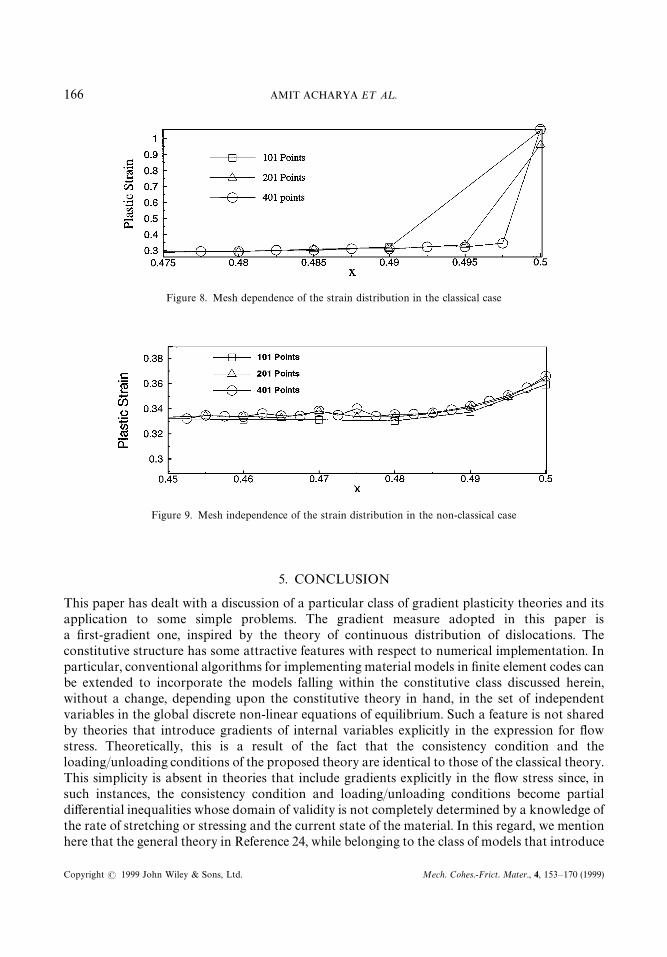
Figure 8. Mesh dependence of the strain distribution in the classical case
Figure 9. Mesh independence of the strain distribution in the non-classical case
5. CONCLUSION
This paper has dealt with a discussion of a particular class of gradient plasticity theories and itsapplication to some simple problems. The gradient measure adopted in this paper isa first-gradient one, inspired by the theory of continuous distribution of dislocations. Theconstitutive structure has some attractive features with respect to numerical implementation. Inparticular, conventional algorithms for implementing material models in finite element codes canbe extended to incorporate the models falling within the constitutive class discussed herein,without a change, depending upon the constitutive theory in hand, in the set of independentvariables in the global discrete non-linear equations of equilibrium. Such a feature is not sharedby theories that introduce gradients of internal variables explicitly in the expression for flowstress. Theoretically, this is a result of the fact that the consistency condition and theloading/unloading conditions of the proposed theory are identical to those of the classical theory.This simplicity is absent in theories that include gradients explicitly in the flow stress since, insuch instances, the consistency condition and loading/unloading conditions become partialdifferential inequalities whose domain of validity is not completely determined by a knowledge ofthe rate of stretching or stressing and the current state of the material. In this regard, we mentionhere that the general theory in Reference 24, while belonging to the class of models that introduce
166 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
gradients in the flow stress, avoids such complications by imposing the constraint that thegradient of the rate of equivalent plastic strain vanish at all points that load plastically in thebody. Of course, such a constraint would appear to have the status of a field equation of thetheory, to be satisfied above and beyond the balance laws, constitutive equations, boundaryconditions, and initial conditions in order to derive a solution to a given problem. For, if not, twonecessary conditions that arise from the general theory in reference 24 are, in the notation of thatpaper,
+eR 1"0 (46)
and
eR 1"(L//Ls)sR
C(47)
and it appears that these two equation can be automatically consistent in a loading zoneonly under very special stress states and rates of stressing, 1-D equilibrium problem being onesuch special case due to the homogeneous nature of the stress field required by equilibriumat all times.
It is perhaps interesting to note that the numerical results presented in this paper illustratea breakdown of the simulations due to the hardening modulus tending to zero in regions of thespatial domain undergoing near-homogeneous deformations locally, a behaviour very similar toexpectations out of a classical local plasticity model. Considering the fact that the present theoryreduces exactly to the classical theory of plasticity in the absence of gradients, we do not considersuch an outcome from our model as a matter of concern and defer the matter of numericallycoping with such issues to sophisticated numerical stretegies like those proposed by Garikipatiand Armero.47 On the other hand, in regions dominated by strong inhomogeneities, our resultsdo indicate a stabilizing effect on the deformation which scales with the magnitude of the materiallength-scale in the model, and we hope that it is precisely this effect that will be beneficial in themodelling of post-localization behaviour and deformation patterning in solids.
APPENDIX: AN OUTLINE OF SOLUTION TO EQUATION (19)
Here we show a method of obtaining the solution to the equation
u, t#f (u
,x)"0 (48)
In the above, we assume that f (u) is a convex function of u and denote its slope by f @ (u). Thef satisfies the following convexity condition
f (u)*f (v)#f @ (v)(u!v) (49)
for all u and v. With the choice of u"u,x
, the above becomes
f (u,x
)*f (v)#f @ (v)(u,x!v) (50)
Making use of (48) in (50), the above can be rewritten as
u, t#f @ (v)u
,x)f @ (v)v!f (v) (51)
NEW PROPOSAL IN GRADIENT PLASTICITY 167
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

where v is arbitrary. Next, let us consider, for arbitrarily fixed v, the line in (x, t) plane given by
x(t)!y
t"f @ (v) (52)
where y is the x-intercept. In the following we define the variable:
z :"x!y
t(53)
Integrating (48) along this line, from 0 to t, we obtain for t*0,
u (x, t))u (y, 0)#t[ f @ (v)v!f (v)] (54)
Since f @ is monotonically increasing, inverting (52), we obtain
v"f @ (v)Ax!y
t B"f @~1(z) (55)
Next, let us introduce the Legendre—Fenchel transform f * of f by
f *(z)"mina
[za!f (a)]"z f @~1(z)!f ( f @~1 (z)) (56)
Combining equations (54) and (56), we obtain
u (x, t))u(y, 0)#t f *Ax!y
t B (57)
Thus, for fixed x, t the left-hand side of (57) provides a lower bound for the right-hand side. If itcan be shown that (57) holds for all values of y with the strict equality holding for a particularchoice of y, then the solution to equation (48) can be obtained by minimizing the right-hand side.Since v is arbitrary and f @ is invertible, y is arbitrary. In particular, choosing v"u
,x, we see that
the equality in equation (50) and hence in (57) holds.Thus, the solution to equation (48) is given by
u (x, t)"miny Cu(y, 0)#t f *A
x!y
t BD (58)
REFERENCES
1. N. A. Stelmashenko, M. G. Walls, L. M. Brown and Yu. V. Milman, ‘Microindentations on W and Mo oriented singlecrystals: an STM study’, Acta Metal Mater., 41, 2855—2865 (1993).
2. Q. Ma and D. A. Clarke, ‘Size dependent hardness of silver single crystals’, J. Mater. Res., 10, 853—863 (1995).3. L. M. Brown and R. K. Ham, in Dislocation-Particle Interactions, Kelly and Nicholson (ed.) Elsevier, Amsterdam,
London, New York. 1971, pp. 12—135.4. G. R. Piercy, R. W. Cahn, and A. H. Cottrell, ‘A study of primary and conjugate slip in crystals of alpha-brass’, Acta
Metall., 3, 331—338 (1955).5. Y. W. Chang and R. J. Asaro, ‘An experimental study of shear localization in aluminum-copper crystals’, Acta Metall.,
29, 241—257 (1981).6. E. C. Aifantis, ‘On the microstructural origin of certain inelastic models’, J. Engng. Mat. ¹ech., 106, 326—330 (1984).7. E. C. Aifantis, ‘The physics of plastic deformation’, Int. J. Plasticity, 3, 211—247 (1987).8. E. C. Aifantis, ‘On the role of gradients in the localization of deformation and fracture’, Int. J. Engng. Sci., 30,
1279—1299 (1992).
168 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
9. E. C. Aifantis, ‘Pattern formation in plasticity’, Int. J. Engng. Sci., 33, 2161—2178 (1995).10. E. C. Aifantis, ‘Non-linearity, periodicity and patterning in plasticity and fracture’, Int. J. Non-¸inear Mechanics, 31,
797—809 (1996).11. H. M. Zbib and E. C. Aifantis, ‘A gradient-dependent model for the Parterin—Le Chatelier effect’, Scripta Metal., 22,
1331—1336 (1988).12. H. M. Zbib and E. C. Aifantis, ‘A gradient-dependent flow theory of plasticity’, Appl. Mech. Rev., 42, 295—305 (1989).13. H. M. Zbib and E. C. Aifantis, ‘On the gradient-dependent theory of plasticity and shear banding’, Acta Mechanica,
92, 209—225 (1992).14. D. J. Bammann and E. C. Aifantis, ‘On a proposal for a continuum with microstructure’, Acta Mechanica, 45, 91
(1982).15. H. B. Muhlhaus and E. C. Aifantis, ‘A variational principle for gradient plasticity’, Int. J. Solids Struct., 28, 845—857
(1991).16. H. B. Muhlhaus and E. C. Aifantis, ‘The influence of microstructure-induced gradients on the localization of
deformation in viscoplastic materials’, Acta Mechanica, 89, 217—231 (1991).17. I. Vardoulakis and E. C. Aifantis, ‘A gradient flow theory of plasticity for granular materials’, Acta Mechanica, 87,
197—217 (1991).18. E. C. Aifantis and J. B. Serrin, ‘Equilibrium solutions in the mechanical theory of fluid microstructures’, J. Colloidal
and Interface Sci., 96, 530—547, (1983).19. E. C. Aifantis and J. B. Serrin, ‘The mechanical theory of fluid intefaces and Maxwell’s rule’, J. Colloidal and Interface
Science, 96, 517—529 (1983).20. R. de Borst and H. B. Muhlhaus, ‘Gradient dependent plasticity: Formulation and algorithmic aspects’, Int. J. Numer.
Meth. Engng., 35(3), 521—539 (1992).21. R. de Borst, L. J. Sluys, H. B. Muhlhaus and J. Pamin, ‘Fundamental issues in finite element analyses of localization of
deformation’, Engng Comput., 10, 99—121 (1993).22. L. J. Sluys and R. de Borst, ‘Wave propagation and localization in a rate-dependent cracked medium: Model
formulation and one-dimensional examples’, Int. J. Solids. Struct., 29, 2945—2958 (1992).23. H. L. Schreyer and Z. Chen, ‘One dimensional softening with localization’, J. Appl. Mech., 53, 791—797 (1986).24. H. L. Schreyer, ‘Analytical solutions for nonlinear strain-gradient softening and localization’, J. Appl. Mech., 57,
522—528 (1990).25. N. A. Fleck and J. W. Hutchinson, ‘A phenomenological theory for strain gradient effects in plasticity’, J. Mech. Phys.
Solids, 41, 1825—1857 (1993).26. N. A. Fleck, G. M. Muller, M. F. Ashby, and J. W. Hutchinson, ‘Strain gradient plasticity: theory and experiment’,
Acta Metallurgica et Materialia, 42, 475—487 (1994).27. A. Acharya and J. L. Bassani, ‘On nonlocal flow theories that preserve the structure of incremental boundary value
problems’, in Iº¹AM Symposium on Micromechanics of Plasticity and Damage of Multiphase Materials, A. Pineauand A. Zaoui, eds, Kluwer Academic Publishers, Netherlands, pp. 3—9, 1996.
28. A. Acharya and T. G. Shakwi, ‘Thermodynamic restrictions on constitutive equations for second-deformation-gradient inelastic behavior’, J. Mech. Phys. Solids, 43, 1751—1772 (1995).
29. A. C. Eringen, ‘Theories of nonlocal plasticity’, Int. J. Engng. Sci., 21, 741—751 (1983).30. Z. P. Bazant, ‘Imbricate continuum and its variational derivation’, J. Engng. Mech. Div. ASCE, 110, 1693—1712 (1984).31. Z. P. Bazant and G. Pijaudier-Cabot, ‘Nonlocal continuum damage, localization instability and convergence’, J. Appl.
Mech., 55, 287—293 (1988).32. G. Pijaudier-Cabot and A. Benallal, ‘Strain localization and bifurcation in a non-local continuum’, Int. J. Solids.
Struct., 1761—1775 (1994).33. V. Tvergaard and A. Needleman, ‘Effects of nonlocal damage in porous plastic solids’, Int. J. Solids. Struct., 32,
1063—1077 (1995).34. P. M. Naghdi and A. R. Srinivasa, ‘A dynamical theory of structured solids. I Basic developments’, Phil. ¹rans. Roy
Soc ¸ond. A, 345, 425—458 (1993).35. P. M. Naghdi and A. R. Srinivasa, ‘A dynamical theory of structured solids. II Special constitutive equations and
special cases of the theory’, Phil. ¹rans. Roy Soc. ¸ond. A, 345, 459—476 (1993).36. A. Acharya and J. L. Bassani, ‘Incompatible lattice deformations and crystal plasticity’, Plastic and Fracture
Instabilities in Materials, AMD-Vol. 200/MD-Vol. 57, ASME, 75—80 (1995).37. K. C. Le and H. Stumpf, ‘A model of elastoplastic bodies with continuously distributed dislocations’, Int. J. Plasticity,
12, 611—627 (1996).38. R. Hill, ‘A general theory of uniqueness and stability in elastic-plastic solids’, J. Mech. Phys. Solids, 6, 236—249 (1958).39. R. Hill, ‘Some basic principles in the mechanics of solids without a natural time’, J. Mech. Phys. Solids, 7, 209—225
(1959).40. R. Hill, ‘Aspects of invariance in solid mechanics’, Advances in Applied Mechanics, Vol. 18, Academic Press Inc.,
New York, 1978, pp. 1—75.41. K. Kondo (ed.), ‘Memories of the Unifying study of the basic problems in the engineering by means of geometry’, I, II,
III, IV, Gakujutsu Bunken Fukyu-Kai, Tokyo (1955, 1958, 1962, 1968).
NEW PROPOSAL IN GRADIENT PLASTICITY 169
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

42. J. F. Nye, ‘Some Geometrical Relations In Dislocated Crystaals’, Acta Metallurgica, 1, 153—162 (1953).43. B. A. Bilby, R. Bullough and E. Smith, ‘Continuous distributions of dislocations: a new application of the methods of
non-Riemannian geometry’, Proc. Roy. Soc. ¸ondon A, 231, 263—273 (1955).44. E. Kroner, in Physics of Defects, R. Balian et al. (eds), North-Holland, Amsterdam, 1981.45. A. Acharya and J. L. Bassani, ‘Incompatibility and crystal plasticity’, in preparation.46. P. Lax, Hyperbolic Systems of Conservation ¸aws and the Mathematical ¹heory of Shock ¼aves, Society for Industrial
and Applied Mathematics, Philadelphia, 1973.47. F. Armero and K. Garikipati, ‘An analysis of strong discontinuities in multiplicative finite strain plasticity and
their relation with the numerical simulation of strain localization in solids’, Int J. Solids Struct., 33, 2863—2885(1996).
170 AMIT ACHARYA E¹ A¸.
Mech. Cohes.-Frict. Mater., 4, 153—170 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.


















