
A new electro-mechanical bioreactor for soft tissue ... · KEY WORDS: Bioreactor design, Dynamic...
10
INTRODUCTION Bioreactors are generally defined as devices in which biological and/or biochemical processes develop under closely monitored and tightly controlled envi- ronmental conditions (eg, pH, temperature, pres- sure, nutrient supply and waste removal). Such devices have traditionally been used in industrial fer- mentation processing, in food processing and phar- maceutical production. Due to the high degree of reproducibility, control and automation of bioreac- tor-based processes, in the last 20 yrs bioreactors have been extensively used in the field of in vitro tissue en- gineering, where they play a key role in several pro- cedures (1). Bioreactors have been widely used to optimize cell seeding procedures (2, 3) or to maintain the viability of 3D constructs by perfusion or diffusion systems (4, 5). Moreover, they have been classically employed as mechanical and electrical stimulators of differenti- ated or differentiating cells previously cultured in static conditions on 3D matrices (scaffolds). Through the use of bioreactors, it was possible to prove that physical factors improve and accelerate tissue devel- opment and maturation in vitro, especially in the case of tissues which are subjected to physical (mechani- cal, electrical, fluid dynamical) stimuli during em- bryogenesis and growth. As an example, pulsatile shear stress was found to increase endothelial cell proliferation (6), while dynamic loading or shear stress of chondrocytes embedded in a 3D environ- ment was proved to stimulate GAG synthesis (7-9) and increase the mechanical properties of the resulting tissue (9, 10). Furthermore, cyclic mechanical stretch was found to increase tissue organization and the ex- pression of elastin by smooth muscle cells (SMCs) seeded in polymeric scaffolds (11). Pulsatile radial stimulation of tubular scaffolds seeded with SMCs im- proved structural organization and suture retention of engineered blood vessels (12). Regarding electrical stimulation, neural gene expression promotion by the activation of calcium channels was observed as a re- sult of the application of physiological electrical pat- terns to primary sensory neurons (13). Journal of Applied Biomaterials & Biomechanics 2007; Vol. 5 no. 2: 00-00 1722-6899/001-10$15.00/0 © Società Italiana Biomateriali A new electro-mechanical bioreactor for soft tissue engineering S. MANTERO 1 , N. SADR 1 , S.A. RIBOLDI 1 , S. LORENZONI 1 , F.M. MONTEVECCHI 2 1 Department of Bioengineering, Politecnico di Milano, Milano - Italy 2 Department of Mechanics, Politecnico di Torino, Torino - Italy ABSTRACT: By enabling the maintenance of controlled chemical and physical environmental conditions, bioreactors proved that electro-mechanical stimulation improves tissue development in vitro, especially in the case of tissues which are subjected to stim- uli during embryogenesis and growth (ie skeletal and cardiac muscle tissue). However, most of the bioreactors developed in the last 20 yrs, designed to suit specific applications, lack versatility. With the aim to provide researchers with a yielding, versatile tool, we designed and realized in this study an electro-mechanical stimulator capable of dynamically culturing four biological con- structs, delivering assignable stretching and electrical stimulation patterns. The device has been conceived to be easy to handle and customizable for different applications, while ensuring sterility along with stimuli delivery. The gripping equipment, mod- ular and adaptable to scaffolds of different consistencies, is provided with dedicated tools for supporting sample insertion into the culture chamber performed under a laminar flow hood. As to performance, a wide range of electro-mechanical stimulation patterns and their relative occurrence can be accomplished, permitting the adjustment of the dynamic culture parameters both to the specific cell species and to the developmental phase of the cultured cells. (Journal of Applied Biomaterials & Biomechanics 2007; 5:) KEY WORDS: Bioreactor design, Dynamic culture, Soft tissue development, Mechanical stimulation, Electrical stimulation, Muscle tissue engineering Received ; Revised ; Accepted
Transcript of A new electro-mechanical bioreactor for soft tissue ... · KEY WORDS: Bioreactor design, Dynamic...

INTRODUCTION
Bioreactors are generally defined as devices in whichbiological and/or biochemical processes developunder closely monitored and tightly controlled envi-ronmental conditions (eg, pH, temperature, pres-sure, nutrient supply and waste removal). Suchdevices have traditionally been used in industrial fer-mentation processing, in food processing and phar-maceutical production. Due to the high degree ofreproducibility, control and automation of bioreac-tor-based processes, in the last 20 yrs bioreactors havebeen extensively used in the field of in vitro tissue en-gineering, where they play a key role in several pro-cedures (1).Bioreactors have been widely used to optimize cellseeding procedures (2, 3) or to maintain the viabilityof 3D constructs by perfusion or diffusion systems (4,5). Moreover, they have been classically employed asmechanical and electrical stimulators of differenti-ated or differentiating cells previously cultured instatic conditions on 3D matrices (scaffolds). Through
the use of bioreactors, it was possible to prove thatphysical factors improve and accelerate tissue devel-opment and maturation in vitro, especially in the caseof tissues which are subjected to physical (mechani-cal, electrical, fluid dynamical) stimuli during em-bryogenesis and growth. As an example, pulsatileshear stress was found to increase endothelial cellproliferation (6), while dynamic loading or shearstress of chondrocytes embedded in a 3D environ-ment was proved to stimulate GAG synthesis (7-9) andincrease the mechanical properties of the resultingtissue (9, 10). Furthermore, cyclic mechanical stretchwas found to increase tissue organization and the ex-pression of elastin by smooth muscle cells (SMCs)seeded in polymeric scaffolds (11). Pulsatile radialstimulation of tubular scaffolds seeded with SMCs im-proved structural organization and suture retentionof engineered blood vessels (12). Regarding electricalstimulation, neural gene expression promotion by theactivation of calcium channels was observed as a re-sult of the application of physiological electrical pat-terns to primary sensory neurons (13).
Journal of Applied Biomaterials & Biomechanics 2007; Vol. 5 no. 2: 00-00
1722-6899/001-10$15.00/0© Società Italiana Biomateriali
A new electro-mechanical bioreactor for soft tissue engineering
S. MANTERO1, N. SADR1, S.A. RIBOLDI1, S. LORENZONI1, F.M. MONTEVECCHI2
1Department of Bioengineering, Politecnico di Milano, Milano - Italy2Department of Mechanics, Politecnico di Torino, Torino - Italy
ABSTRACT: By enabling the maintenance of controlled chemical and physical environmental conditions, bioreactors proved thatelectro-mechanical stimulation improves tissue development in vitro, especially in the case of tissues which are subjected to stim-uli during embryogenesis and growth (ie skeletal and cardiac muscle tissue). However, most of the bioreactors developed in thelast 20 yrs, designed to suit specific applications, lack versatility. With the aim to provide researchers with a yielding, versatiletool, we designed and realized in this study an electro-mechanical stimulator capable of dynamically culturing four biological con-structs, delivering assignable stretching and electrical stimulation patterns. The device has been conceived to be easy to handleand customizable for different applications, while ensuring sterility along with stimuli delivery. The gripping equipment, mod-ular and adaptable to scaffolds of different consistencies, is provided with dedicated tools for supporting sample insertion intothe culture chamber performed under a laminar flow hood. As to performance, a wide range of electro-mechanical stimulationpatterns and their relative occurrence can be accomplished, permitting the adjustment of the dynamic culture parameters both tothe specific cell species and to the developmental phase of the cultured cells. (Journal of Applied Biomaterials & Biomechanics2007; 5:)
KEY WORDS: Bioreactor design, Dynamic culture, Soft tissue development, Mechanical stimulation, Electrical stimulation, Muscle tissue engineering
Received ; Revised ; Accepted

A new electro-mechanical bioreactor for soft tissue engineering
2
One of the most promising applications of bioreactors,however, emerged in the field of musculoskeletal andcardiac tissue engineering, with the aim to improve bi-ological construct organization and maturation. Based on the finding that stretching plays a key rolein muscle tissue development (14, 15), the effect ofmechanical stretching on cultured muscle cells hasbeen investigated in several studies employing biore-actors. Bach et al (16) demonstrated that applied me-chanical forces are crucial aspects to the in vitrodevelopment of differentiated functional muscle tis-sue, while direct mechanical tension influenced theorganization of myoblasts (muscle cells precursors)into functional aligned myotubes, and provided astimulus for the expression of mature isoforms of my-ofibrillar proteins such as myosin heavy chain (MHC)(17). Powell et al (18) also reported that mechanicalstimulation improves the structure of the engineeredskeletal muscle tissue by increasing the mean my-ofiber diameter and their elasticity. Moreover, cyclicmechanical stretch was found to enhance prolifera-tion and matrix organization by human heart cellsseeded on gelatin-matrix scaffolds (19).Another approach towards the development of dif-ferentiated and functional muscle tissue is the appli-cation of electrical stimulation (20-25). Miming nervestimulation during myogenesis and during regenera-tion of injured muscle, induced contractile activity ofmammalian skeletal muscle cells in bioreactors wasshown to enhance the development of functional sar-comeric architectures (20). Furthermore, it was ob-served that chronic electrical stimulation promotesmyotube differentiation, while primary myoblastMHC expression is modulated depending on differ-ent impulse patterns (22, 25). Promising results ofelectrical stimulation were also found in the field ofcardiac muscle tissue engineering: electrical stimula-tion of neonatal rat ventricular myocytes, in particu-lar, induced cell alignment and coupling, increasedthe amplitude of synchronous contractions and re-sulted in a remarkable level of ultrastructural organ-ization (24).Several bioreactors have been designed and realizedto study the effect of electrical and mechanical stim-ulation on 3D biological constructs. These devicesdemonstrated the importance of dynamic culture forfunctional mature soft tissue development, but at thesame time were demonstrated to suffer from someimportant limitations. Since they were purposely de-signed to suit a specific application, both with refer-ence to the sample holders (26, 27) and to stimu-lation patterns (20, 25) the lack of versatility of thedevices, in terms of suitability to different biologicalconstructs, represents the major flaw of those biore-actors. Most of the systems are not suitable for the
contemporaneous delivery of mechanical and elec-trical stimulation(25) and, even when this is feasible,the traction-contraction temporal occurrence cannotbe planned and controlled (20). The set up proce-dures are often not thought through in order to befast and easy or planned taking care of good labora-tory practice (GLP) rules (26, 27).With the aim of addressing the concerns raisedabove, an innovative highly technological device ca-pable of dynamically culturing 3D engineered con-structs of different origins, delivering stretchingpatterns and/or electrical stimuli, has been devel-oped. The bioreactor was designed to be easily usedby the operators, and to satisfy all the security re-quests of a biological laboratory. The sterility main-tenance of the culture was specifically taken intoconsideration during the device conception. In thisarticle, a detailed description of the device, the elec-tro-tensile bioreactor itself and its performances arereported; a typical example of its possible use in mus-culoskeletal tissue engineering is also described.
MATERIALS AND METHODS
DEVICE REQUIREMENTS
The general functions of the bioreactor are the con-trol and the delivery of accurate and reproduciblestretching and/or electrical stimulation patterns, andthe generation of a biochemical environment suit-able for growth and differentiation of several cellphenotypes.In order to achieve this aim, the first design principleis high versatility both of the actuators and of thestimulation patterns, so that the device can be em-ployed with several biological constructs and for dif-ferent applications. It is also valuable to assure fullcompatibility with GLP procedures. Deriving fromthese general design criteria, the most significantconstraints and requirements are the following:- Cytocompatibility of all the materials in contact withculture medium.
- Corrosion-resistance of the materials in contact withculture medium.
- Ease of sterilization and sterility maintenance.- Ease of use (assembly in sterile conditions under alaminar flow hood, medium exchange, cleaning,use for non-trained staff).
- Small dimensions, suitable for positioning in a cellculture incubator.
- No medium stagnation during exchange operations.- Housing of an experimentally significant numberof specimens.
- Visual inspection possibility.

Mantero et al
3
DEVICE DESCRIPTION
We designed and realized a bioreactor for dynamicculture of engineered soft tissue constructs. This device can deliver an arbitrary electro-mechanicalstimulation under closely monitored and tightly con-trolled environmental conditions.
System overview
Key constitutive elements of the bioreactor are:• A culture chamber: a sterile area where cells,
seeded on the polymeric scaffold, and culturemedium will be housed during the entire durationof the experiments.
• A mechanical stimulation subsystem that providespredefined stretching stimuli to the biological con-structs.
• An electrical stimulation subsystem that providespredefined electrical stimuli to the biological con-structs.
• A system controller that manages the entire exper-iment.
Figure 1 schematically depicts the system. During theexperiment, the culture chamber, housing the grip-ping system, the electrodes and the stepping motorare positioned in the incubator. The electrical stim-ulator and the controller are positioned outside toprotect them from the high humidity that character-izes the internal atmosphere of the incubator.Figure 2 shows the control system components andtheir mutual connections: the controller, based on aProgrammable Logic Controller (PLC), is equippedwith an external position module. The latter controlsa driver that provides current signals to the steppingmotor. The PLC also delivers trigger signals to theelectrical stimulator that is programmed by a PCusing dedicated software.
Culture chamber
The transparent culture chamber (Fig. 3a), whichrepresents the sterile and cytocompatible environ-ment where cell cultures take place, was obtainedthrough material removal by a micrometrical con-trolled cutter from a Plexiglas® bulk piece. The innerdimensions are approximately 100*90*60 mm. Therounded edges were conceived to avoid stagnationpoints and no inlet, discontinuities, fissures, inter-stices, holes, which are preferable targets for micro-bial contamination, should be present. In thechamber, two groups of four grips, each of themscrewed onto a crossbar, are positioned symmetricallyto hold four biological constructs. To allow the me-chanical stimulation of the samples, one crossbar is
Fig. 1 - The bioreactor configuration during sample conditioning.(a) A schematic representation: the culture chamber and the step-ping motor (1) are housed in the incubator (2), while the electricalstimulator (3) and the controller (4) are positioned outside the in-cubator. (b) An image of the configuration in the biological labo-ratory.
Fig. 2 - Schematic diagram of the control system components andconnections. The PLC based controller is equipped with a positionmodule that controls the stepping motor driver. Four PLC outputsare used to trigger the electrical stimulator that is set using a PC.

A new electro-mechanical bioreactor for soft tissue engineering
4
fastened to the culture chamber inner wall, while theother is screwed to a couple of drive shafts connectedto the stepping motor. A couple of dynamic di-aphragms (Fig. 3b) enwrap each drive shaft assuringsterility and allowing motion transmission. An AISI316 rank provides a fastening structure for the step-ping motor and for four toggle latches, constitutingat the same time two symmetrical handling points.The chamber is equipped with two lids: one usedduring mechanical stimulation and the other whenelectro-mechanical stimuli have to be delivered. Theelectro-mechanical lid is equipped with a rank tohouse eight electrodes providing the electrical stim-ulation to the biological constructs. A D type con-nector (Fig. 3c), protected by a silicon sheath and byan O-ring, assures electrical connections and wasspecifically designed to guarantee sterility, allowingat the same time electrical stimulus delivery. The lidscan be kept in position by toggle latches, while ster-ile gas exchange is possible through two high effi-ciency particulate air filters (HEPA) that are posi-
tioned on two holes on the lid. These two inlets canalso serve as valuable access for medium exchangeprocedures and for specific growth factor insertionduring the experiment.
Mechanical stimulation subsystem
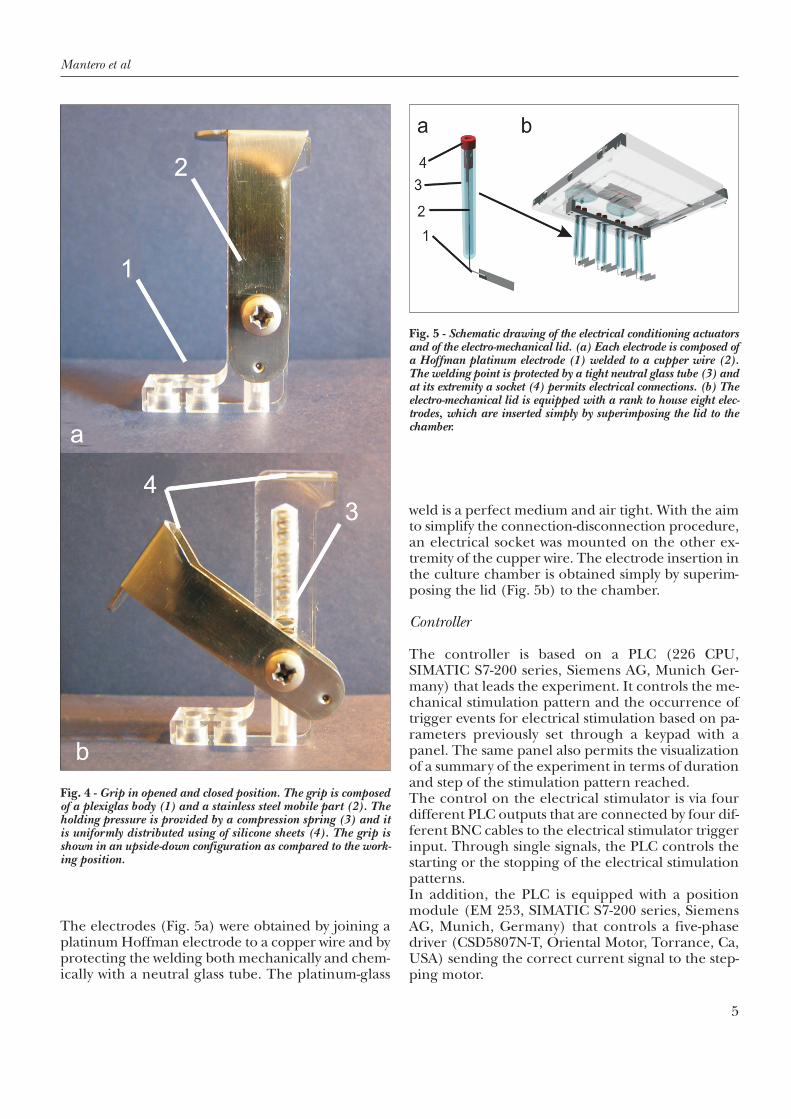
The mechanical stimulation subsystem is composedof a stepping motor driving two drive shafts screwedonto a crossbar that fixes four mobile grips. The dy-namic diaphragms that enwrap each drive shaft as-suring sterility permit an 8 mm maximum mono-axialdislocation. The micrometrical stepping motor(DRL28PB1G-03D, LIMO series, Oriental Motor, Tor-rance, Ca, USA), developing a maximum holdingforce of 30 N, has a 2 µm resolution single step, witha maximum acceleration of 0.2 m/s2 and a maximumspeed of 24 mm/s.Four pairs of grips were designed (Fig. 4) to satisfyfully both the holding and the preservation of the in-tegrity of the specimen during the experiment. Thegrip bodies were obtained from Plexiglas®, while themobile component was manufactured from an AISI316 plate. The grasping system is based on a com-pression spring that pulls the mobile componentagainst the grip body assuring a controlled holdingpressure (105 Pa). This pressure is transferred uni-formly to the biological constructs, avoiding loadconcentration points due to two silicon sheets, posi-tioned on the mobile component and on the Plexi-glas®. The characteristics of both the spring and thesilicon sheet can be customized to adapt the grasp-ing system to the consistency of different biologicalconstructs.
Electrical stimulation subsystem
The electrical stimulation subunit is composed of aprogrammable electrical stimulator (STG 2004 MultiChannel Systems, MCS GmbH, Reutlingen, Ger-many) and eight transmission lines (four pairs oftwisted isolated wires) that deliver the electrical sig-nal to four pairs of platinum electrodes.The stimulator can be programmed with differentpatterns by specific software (MC_Stimulus II, MultiChannel Systems, MCS GmbH, Reutlingen, Ger-many) and then triggered with 5 V Transistor-Tran-sistor Logic (TTL) signals, but it is also supplied withfour synchronization outputs that could be set to pro-vide signals to other devices. The electrical stimula-tion outputs can be both current- or voltage-controlled and a maximum 8 V or a 3.2 mA signalcan be delivered with 2 mV or 200 nA amplituderesolution and with 4 V/µs or 100 µA/µs slope timeresponse.
Fig. 3 - Culture chamber. The culture chamber (a) houses four bi-ological constructs holding them with a system of symmetrical grips.In order to preserve the sterility of the chamber, each drive shaft isprovided with two dynamic diaphragms (b - 1) and the electricalconnections are obtained with a D connector (c). Both these systemsare tight.
Mantero et al
5
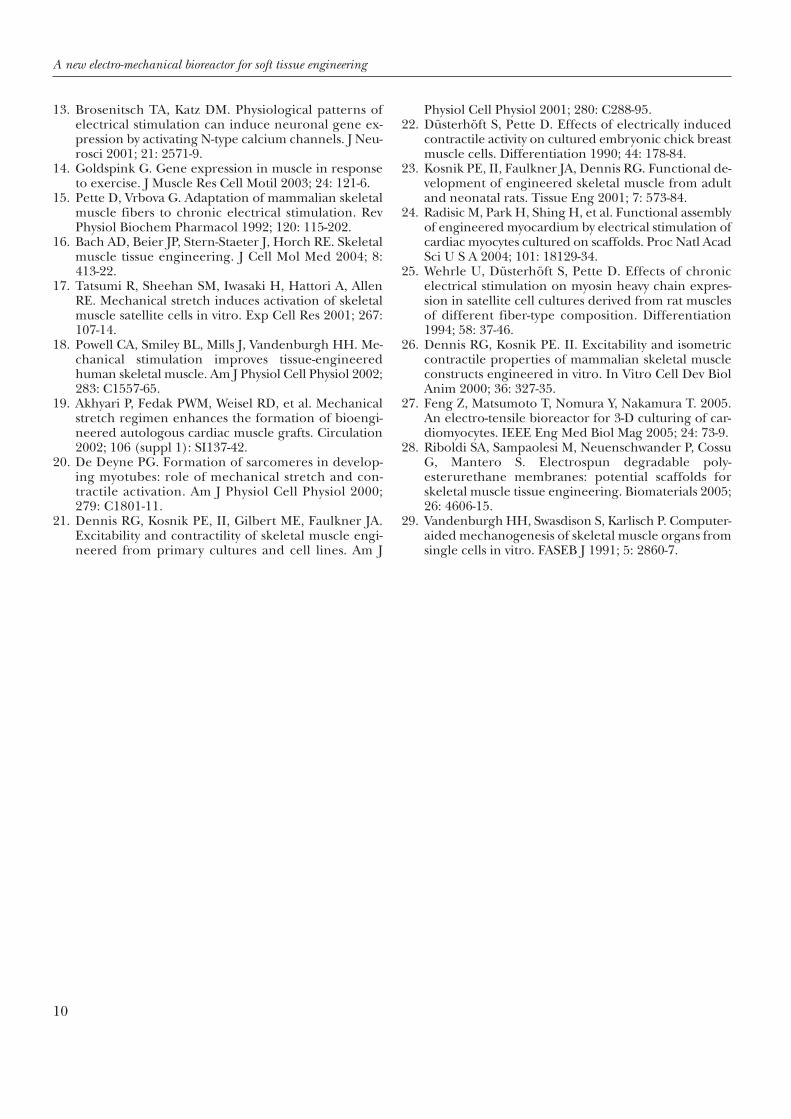
The electrodes (Fig. 5a) were obtained by joining aplatinum Hoffman electrode to a copper wire and byprotecting the welding both mechanically and chem-ically with a neutral glass tube. The platinum-glass
weld is a perfect medium and air tight. With the aimto simplify the connection-disconnection procedure,an electrical socket was mounted on the other ex-tremity of the cupper wire. The electrode insertion inthe culture chamber is obtained simply by superim-posing the lid (Fig. 5b) to the chamber.
Controller
The controller is based on a PLC (226 CPU,SIMATIC S7-200 series, Siemens AG, Munich Ger-many) that leads the experiment. It controls the me-chanical stimulation pattern and the occurrence oftrigger events for electrical stimulation based on pa-rameters previously set through a keypad with apanel. The same panel also permits the visualizationof a summary of the experiment in terms of durationand step of the stimulation pattern reached.The control on the electrical stimulator is via fourdifferent PLC outputs that are connected by four dif-ferent BNC cables to the electrical stimulator triggerinput. Through single signals, the PLC controls thestarting or the stopping of the electrical stimulationpatterns.In addition, the PLC is equipped with a positionmodule (EM 253, SIMATIC S7-200 series, SiemensAG, Munich, Germany) that controls a five-phasedriver (CSD5807N-T, Oriental Motor, Torrance, Ca,USA) sending the correct current signal to the step-ping motor.
Fig. 4 - Grip in opened and closed position. The grip is composedof a plexiglas body (1) and a stainless steel mobile part (2). Theholding pressure is provided by a compression spring (3) and itis uniformly distributed using of silicone sheets (4). The grip isshown in an upside-down configuration as compared to the work-ing position.
Fig. 5 - Schematic drawing of the electrical conditioning actuatorsand of the electro-mechanical lid. (a) Each electrode is composed ofa Hoffman platinum electrode (1) welded to a cupper wire (2).The welding point is protected by a tight neutral glass tube (3) andat its extremity a socket (4) permits electrical connections. (b) Theelectro-mechanical lid is equipped with a rank to house eight elec-trodes, which are inserted simply by superimposing the lid to thechamber.

A new electro-mechanical bioreactor for soft tissue engineering
6
RESULTS
DEVICE PERFORMANCES
Our electro-mechanical stimulator is a versatile sys-tem that could be easily used with many soft tissues toinduce growth and development of tendons, liga-ments, skeletal and cardiac muscles in all the biolog-ical laboratories in accordance with GLPs.All the materials are highly cytocompatible and cor-rosion resistant, and the different components canbe sterilized with an ethylene-oxide-based process be-fore setting up the experiment. During the opera-tions preceding sterilization, the culture chamber,the grips and some support tools, consisting of aTeflon® mounting table and a couple of crossbars fix-ing the distance between the grips (Fig. 6a), are as-sembled and arranged in order to simplify andminimize the number of set up operations under alaminar flow hood after sterilization. The set up pro-cedure can subsequently be performed under a lam-inar flow hood in accordance with the GLP rules andmaintaining the sterility of the culture chamber. Dueto the support tools and to the preliminary device or-ganization, the operations that need to be conductedunder laminar flow are just two: (a) specimens grasp-ing on the grips (Fig. 6b); and (b) their insertionwith a single motion in the culture chamber (Fig. 6c-
f); both of them can be easily performed maintainingthe sterility of the culture chamber and of the bio-logical constructs. As is evident from Figure 6, thespecimen gripping procedure is conducted in an up-side-down configuration as compared with the hold-ing position in the culture chamber. The sterility ofthe culture chamber is guaranteed during the entireexperiment and all the holes (air inlets, mechanicaland electrical stimulation passages) are protectedwith highly efficient air tight systems.The controller leads the experiment based on thesettings of an actual program that manages both thestretching and the electrical stimulation (Fig. 7). Itis also possible to set and save 10 different mechani-cal stimulation patterns and 10 different trigger set-tings that can be recalled and loaded as an actualprogram in several mixed culture recipes. The con-troller settings, both of the actual and of the presetprograms, are also simple and easy to use for non-trained staff and can be managed to have a contem-poraneous or alternative mechanical and electricalstimulation.On the mechanical side, the device provides the pos-sibility to set (a) unidirectional traction with differenttensile rates, (b) cyclic traction and relaxation witharbitrary amplitudes (never exceeding the 8 mmmaximum dislocation imposed by the dynamic di-aphragms) and frequencies, and (c) resting periods.
Fig. 6 - Image of the set up tools and procedure. During specimen mounting procedure, (a) the grips are positioned in a upside-down con-figuration around a Teflon mounting table (1) and their distance is fixed by a couple of stainless steel crossbars (2). Under a laminar flowhood (b) the operator grasps the specimens, then (c-d) using the handles the operator lifts the structure consisting of grips, specimens andcrossbars, (e) rotates it and finally (f) inserts it in the culture chamber. All the procedures are guaranteed sterile and in accordance withGLPs.

Mantero et al
7
On the electrical side, the electrical stimulator deliv-ers composed patterns using simple (sine, square,ramp) or complex waveforms that can be set due touser friendly software. It is also possible to reproducephysiological waveforms using clinical data collected.As the electrical stimulator is triggered by the con-troller, in the case of a contemporaneous delivery ofstretching and electrical stimulation, it is possible toplan the relative occurrence of traction and contrac-tion, determining the exact loading pattern for thebiological constructs. The synchronization outputson the electrical stimulator could be used to controlsecondary devices such as chemical sensors or imagedetectors that should be introduced during futureupdates of the device.Due to the absence of inlets, sharp edges or contactjunctions that could act as medium stagnation points,medium exchange under a laminar flow hood is ex-tremely easy. After stopping the controller, the cul-ture chamber is transferred from the incubator tothe laminar flow hood and the exchange is per-formed as follows: (a) culture chamber lid opening,(b) medium removal with a pipette-aid, (c) freshmedium insertion, and (d) lid superimposition. Afterreplacing the culture chamber in the incubator, thetissue-conditioning program is restarted.
DISCUSSION
As previously reported, skeletal and cardiac muscleprogenitor cells react to specific physical stimuli. It isproved that stretching and contraction play a key rolein muscle tissue development in vivo (14, 15) and,miming the embryogenetic process, mechanicalforce and induced active contraction seem to be animportant aspect to the in vitro development of dif-
ferentiated functional muscle tissue (16, 20).By enabling reproducible and controlled mechani-cal and electrical conditioning of engineered con-structs, bioreactors contribute to improve cell spatialorganization and extra cellular matrix (ECM) depo-sition (1, 19) and to enhance the development offunctional architectures (20, 24); therefore, allowingthe development of structurally and functionally op-timized engineered tissues.In our opinion, the devices designed previously havesome important drawbacks: in suitability to differentbiological constructs (26, 27), in electrical and me-chanical pattern design versatility (20) and in accor-dance with GLP rules (26, 27). Our bioreactor was designed with the aim to over-come these limitations in order to provide a leadingedge powerful device capable of mechanicallyand/or electrically conditioning 3D engineered con-structs of different origins. The main target of ourwork was to realize a bioreactor that could be usedwith several biological constructs testing their re-sponse to different stimulation patterns. In order toreach this goal, our device was designed to be cus-tomizable to the specific application. It can be usedin tendon and ligament in vitro tissue engineering byusing only mechanical functionalities, and in cardiacand skeletal muscle development by making use ofelectro-mechanical functionalities. In particular, thegrasping pressure can be easily regulated by chang-ing the compression spring in the grip while the loaddistribution is regulated using silicon sheets. Wecould assert that the grip design permits the match-ing of the grasping system to the specific biologicalconstruct permitting a proper holding pressure bothon several synthetic polymers (classical degradablepolyesters, polyesterurethanes etc) and on biologicpolymers (derived from hyaluronic acid, collagen orfibrin, for example). Once the specimens are housedin the culture chamber, the operator can freely de-liver mechanical and electrical stimulation patternsin a contemporaneous or alternative mode mixingdifferent mechanical patterns with several electricalstimuli. The mechanical pattern is created choosingamong or composing (a) unidirectional traction atdifferent rates, (b) cyclic traction and relaxation withtunable amplitudes and frequencies, and (c) rest pe-riods to let the cells recover from the previously in-duced stress. The electrical pattern can be designedselecting in a wide range of simple (sine, square,ramp) or complex waveforms and mixing them ar-bitrarily. Reproducing physiological waveforms usingclinical collected data is also feasible due to commontext files. In the case of a contemporaneous deliveryof mechanical and electrical stimulation, the relativeoccurrence of traction and contraction can be easily
Fig. 7 - An example of electro-mechanical stimulation program. Theactual program is composed of a stretching stimulation pattern andof some trigger events that control the electrical stimulator. Both ofthem are widely adjustable.

A new electro-mechanical bioreactor for soft tissue engineering
8
planned to induce contractile cells into a concentric,isometric or eccentric training. All these features pro-vide the possibility of generating a wide range of pattern combinations permitting the smooth adjust-ment of the dynamic culture parameters to the spe-cific cell species, to the specific tissue but also to thespecific developmental phase of cultured cells. Thisopportunity is crucial, especially considering thatmurine and human skeletal muscle are not subjectedto the same traction rate during bone growth, andthat skeletal muscle does not experience the same con-traction pattern as heart muscles do and a fetal musclecannot face the same loads as an adult muscle.Once all tissue-conditioning parameters are chosen
and the start signal is delivered, the bioreactor iscompletely autonomous and highly reliable. Typicalstimulation programs of 4 or 5 weeks could be exe-cuted simply without any external intervention withthe only exception of medium exchange.Regarding the compatibility with common cell cul-ture procedures, several expedients have been usedto assure sterility inside the culture chamber duringthe experiment. Once the device is sterilized, a verysimple and fast procedure under a laminar flowhood, consisting of only two operations (mountingand insertion), permits a sterile and GLP insertionof the specimens. During cell culture, gas exchangeand stimuli delivery are protected by a simple anduseful mechanical tight system preventing chambercontamination.With the aim to verify the potential and performanceof the device, the bioreactor was tested conducting apreliminary experiment of dynamic culture in thefield of skeletal muscle tissue engineering. Based onprevious studies (28) regarding a promising poly-esterurethane scaffold (DegraPol®), line myoblasts(C2C12, murine precursors of skeletal muscle cells)were seeded on DegraPol® elastic microfibrous mem-branes and statically cultured for 4 days in completegrowth medium (10% FBS supplemented DMEM).The samples, four identical strips 50*5*0.2 mm in di-mensions, were subsequently transferred to thebioreactor and cultured further for 10 days experi-encing a stretching pattern adapted from the litera-ture (29). Medium exchange took place every thirdday. Samples were withdrawn at days 7, 10 and 14after seeding and evaluated for the degree of cell dif-ferentiation via myosin immunostaining, using stati-cally cultured specimens as controls. Throughout theduration of the experiment, the bioreactor was re-vealed to be a reliable, autonomous and safe device;in particular, the grasping equipment being fullycompatible with common laboratory procedures,sample insertion was quickly and easily performed insterile conditions under a laminar flow hood. Theculture chamber, which proved to be extremely com-fortable in handling including during medium ex-change operations, showed no sign of microbialcontamination; air inlets provided the necessary oxy-gen supply to cultured cells and none of the compo-nents was shown to release ethylene oxide aftersterilization. During stimulation, the device was ca-pable of applying a precise and repeatable prede-fined stretching pattern to the samples, allowing apreliminary investigation of the effect of cyclic me-chanical load on skeletal muscle cell differentiation.As to this aspect, the applied pattern was demon-strated to allow fusion and differentiation processesof murine myoblasts on DegraPol®, already at day 7
Fig. 8 - Micrograph of C2C12 differentiating on DegraPol mi-crofibrous membranes after 3 days of dynamic culture. Following 4days of culture in static conditions, the constructs were transferredinto the bioreactor and subjected to a stimulation pattern adaptedfrom the literature. Green staining (a-b) represents MHC, a markerof myogenic terminal differentiation, while blue (b) indicates cellnuclei stained with DAPI. The presence of long, multinucleated, un-branched differentiated myotubes is detectable.

Mantero et al
9
after seeding, mechanically stimulated constructsshowed parallel arrays of multinucleated unbranchedmyotubes expressing MHC (a marker of skeletal ter-minal differentiation). Of particular interest provedto be the myotube length, which reached and evenexceeded 700 µm (Fig. 8).Since our bioreactor still suffers from some limita-tions, future updates are now under consideration.A force transducer system to measure the appliedload and the active forces expressed by the biologicalconstructs is the first target. Moreover, a wide rangeof control of the chemical parameters and an imag-ing system will be considered in future developmentsof the device. The data collected would permit thecharacterization of the constructs and the supervi-sion of the environment enabling more controlledand reproducible cell cultures. In order to optimizethe culture to the specific cell response, the data col-lected would also be used to implement a closed loopcontrol of the experimental parameters. In addition,an automatic medium conditioning and exchangesystem will be considered with the aim of reducingcontamination risks and preserving the homeostasis.Finally, a device housing a larger number of speci-mens divided into two different medium chambers
is under consideration to study the effect of bio-chemical factors in a physically identical environ-ment.
ACKNOWLEDGEMENTS
The authors would like to thank BIOTECO s.a.s. for its help inmanufacturing the bioreactor and Erasmo Lucarelli for his con-tribution to culture chamber and mechanical subsystem design.Special thanks to Dr. Peter Neuenschwander for providing De-graPol® and for his support in producing and processing the scaf-folds.
Address for correspondence:Sara Mantero, Ph.D.Department of BioengineeringPolitecnico di MilanoPiazza Leonardo da Vinci 32 20133 Milano [email protected]
REFERENCES
1. Martin I, Wendt D, Herber M. The role of bioreactors intissue engineering. Trends Biotechnol 2004; 22: 80-6.
2. Sodian R, Lemke T, Fritsche C, et al. Tissue-engineer-ing bioreactors: a new combined cell-seeding and per-fusion system for vascular tissue engineering. TissueEng 2002; 8: 863-70.
3. Wendt D, Marsano A, Jakob M, Herber M, Martin I.Oscillating perfusion of cell suspensions throughthree-dimensional scaffolds enhances cell seeding ef-ficiency and uniformity. Biotechnol Bioeng 2003; 84:205-14.
4. Bancroft GN, Sikavitsas VI, van den Dolder J, et al.Fluid flow increases mineralized matrix deposition in3D perfusion culture of marrow stromal osteoblasts ina dose-dependent manner. Proc Natl Acad Sci U S A2002; 99: 12600-5.
5. Jasmund I, Bader A. Bioreactor developments for tis-sue engineering applications by the example of thebioartificial liver. Adv Biochem Eng Biotechnol 2002;74: 99-109.
6. Williams C, Wick TM. Endothelial cell-smooth musclecell co-culture in a perfusion bioreactor system. Ann
Biomed Eng 2005; 33: 920-8.7. Davisson T, Sah RL, Ratcliffe A. Perfusion increases
cell content and matrix synthesis in chondrocytethree-dimensional cultures. Tissue Eng 2002; 8: 807-16.
8. Raimondi MT, Boschetti F, Falcone L, Migliavacca F,Remuzzi A, Dubini G. The effect of media perfusionon three-dimensional cultures of human chondro-cytes: integration of experimental and computationalapproaches. Biorheology 2004; 41: 401-10.
9. Waldman SD, Spiteri CG, Grynpas MD, Pilliar RM,Hong J, Kandel RA. Effect of biomechanical condi-tioning on cartilaginous tissue formation in vitro. JBone Joint Surg Am 2003; 85: 101-5.
10. Mauck RL, Soltz MA, Wang CC, et al. Functional tis-sue engineering of articular cartilage through dy-namic loading of chondrocyte-seeded agarose gels. JBiomech Eng 2000; 122: 252-60.
11. Kim B-S, Nikolovski J, Bonadio J, Mooney DJ. Cyclicmechanical strain regulates the development of engi-neered smooth muscle tissue. Nat Biotechnol 1999;17: 979-83.
12. Niklason LE, Gao J, Abbott WM, et al. Functional ar-teries grown in vitro. Science 1999; 284: 489-93.
A new electro-mechanical bioreactor for soft tissue engineering
10
13. Brosenitsch TA, Katz DM. Physiological patterns ofelectrical stimulation can induce neuronal gene ex-pression by activating N-type calcium channels. J Neu-rosci 2001; 21: 2571-9.
14. Goldspink G. Gene expression in muscle in responseto exercise. J Muscle Res Cell Motil 2003; 24: 121-6.
15. Pette D, Vrbova G. Adaptation of mammalian skeletalmuscle fibers to chronic electrical stimulation. RevPhysiol Biochem Pharmacol 1992; 120: 115-202.
16. Bach AD, Beier JP, Stern-Staeter J, Horch RE. Skeletalmuscle tissue engineering. J Cell Mol Med 2004; 8:413-22.
17. Tatsumi R, Sheehan SM, Iwasaki H, Hattori A, AllenRE. Mechanical stretch induces activation of skeletalmuscle satellite cells in vitro. Exp Cell Res 2001; 267:107-14.
18. Powell CA, Smiley BL, Mills J, Vandenburgh HH. Me-chanical stimulation improves tissue-engineeredhuman skeletal muscle. Am J Physiol Cell Physiol 2002;283: C1557-65.
19. Akhyari P, Fedak PWM, Weisel RD, et al. Mechanicalstretch regimen enhances the formation of bioengi-neered autologous cardiac muscle grafts. Circulation2002; 106 (suppl 1): SI137-42.
20. De Deyne PG. Formation of sarcomeres in develop-ing myotubes: role of mechanical stretch and con-tractile activation. Am J Physiol Cell Physiol 2000;279: C1801-11.
21. Dennis RG, Kosnik PE, II, Gilbert ME, Faulkner JA.Excitability and contractility of skeletal muscle engi-neered from primary cultures and cell lines. Am J
Physiol Cell Physiol 2001; 280: C288-95.22. Düsterhöft S, Pette D. Effects of electrically induced
contractile activity on cultured embryonic chick breastmuscle cells. Differentiation 1990; 44: 178-84.
23. Kosnik PE, II, Faulkner JA, Dennis RG. Functional de-velopment of engineered skeletal muscle from adultand neonatal rats. Tissue Eng 2001; 7: 573-84.
24. Radisic M, Park H, Shing H, et al. Functional assemblyof engineered myocardium by electrical stimulation ofcardiac myocytes cultured on scaffolds. Proc Natl AcadSci U S A 2004; 101: 18129-34.
25. Wehrle U, Düsterhöft S, Pette D. Effects of chronicelectrical stimulation on myosin heavy chain expres-sion in satellite cell cultures derived from rat musclesof different fiber-type composition. Differentiation1994; 58: 37-46.
26. Dennis RG, Kosnik PE. II. Excitability and isometriccontractile properties of mammalian skeletal muscleconstructs engineered in vitro. In Vitro Cell Dev BiolAnim 2000; 36: 327-35.
27. Feng Z, Matsumoto T, Nomura Y, Nakamura T. 2005.An electro-tensile bioreactor for 3-D culturing of car-diomyocytes. IEEE Eng Med Biol Mag 2005; 24: 73-9.
28. Riboldi SA, Sampaolesi M, Neuenschwander P, CossuG, Mantero S. Electrospun degradable poly-esterurethane membranes: potential scaffolds forskeletal muscle tissue engineering. Biomaterials 2005;26: 4606-15.
29. Vandenburgh HH, Swasdison S, Karlisch P. Computer-aided mechanogenesis of skeletal muscle organs fromsingle cells in vitro. FASEB J 1991; 5: 2860-7.


















