
A Multi-domain Co-Simulator for Smart Grid: Modeling Interactions in Power, Control ... ·...
91
A Multi-domain Co-Simulator for Smart Grid: Modeling Interactions in Power, Control and Communications by Mellitus Okwudili Ezeme A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Department of Electrical and Computer Engineering University of Toronto © Copyright by Mellitus Okwudili Ezeme 2015
-
Upload
phamkhuong -
Category
Documents
-
view
214 -
download
0
Transcript of A Multi-domain Co-Simulator for Smart Grid: Modeling Interactions in Power, Control ... ·...

A Multi-domain Co-Simulator for Smart Grid: Modeling Interactions in Power, Control and Communications
by
Mellitus Okwudili Ezeme
A thesis submitted in conformity with the requirements for the degree of Master of Applied Science
Department of Electrical and Computer Engineering University of Toronto
© Copyright by Mellitus Okwudili Ezeme 2015

ii
A Multi-domain Co-Simulator for Smart Grid: Modeling
Interactions in Power, Control and Communications
Mellitus Okwudili Ezeme
Master of Applied Science
Department of Electrical and Computer Engineering University of Toronto
2015
Abstract
Smart grid studies have been generating a lot of interest both in the business and research
community as it is now seen as the future power grid. However, understanding the interactions
amongst different components that form the smart grid is a Herculean task. Researchers rely on
simulations as one of the means of understanding the effects of coupling the distributed control
systems, communication networks and power system to form the smart grid, but synchronization
of the simulation times of the various simulators, and data exchange amongst the different
components are challenges that must be overcome. Fixed-time-step and queuing system
synchronization schemes have been proposed, but the fixed-time-step synchronization scheme
suffers from accumulation errors and the proposed queuing method does not scale well. In this
thesis, we present a synchronization scheme that eliminates accumulated synchronization errors,
and efficient data exchange scheme which enhances the scalability of the platform.
iii
Acknowledgements I am grateful to my family for the emotional and financial support they gave me during this
program. Their enduring love, compassion and encouragement kept me going even when I
questioned my own ability. I am also indebted to my research group members (Eman, Abdallah,
Pirathayini, and Joseph) for sparing their time any time I needed help.
This acknowledgement would not be complete without the mention of my Supervisor, Professor
Deepa Kundur, who I owe so much for giving me the platform to do this degree, and advising me
both like a mother and a professor. I will forever remain indebted to her for allowing me take a
sip from her intellectual cup.
iv
Table of Contents Acknowledgements ........................................................................................................................ iii
Table of Contents ........................................................................................................................... iv
List of Tables ............................................................................................................................... viii
List of Figures ................................................................................................................................ ix
Chapter 1 ......................................................................................................................................... 1
1 Introduction ................................................................................................................................ 1
1.1 Background ......................................................................................................................... 1
1.2 Why co-simulator ................................................................................................................ 4
1.2.1 Synchronization ...................................................................................................... 5
1.3 Literature Review ................................................................................................................ 6
1.4 Statement of the Problem and Research Objectives ......................................................... 11
1.5 Dissertation Layout ........................................................................................................... 12
Chapter 2 ....................................................................................................................................... 14
2 Co-simulation in Smart Grid .................................................................................................... 14
2.1 Smart Grid System ............................................................................................................ 14
2.1.1 Components of Smart Grid ................................................................................... 16
2.2 Smart Grid Co-Simulator .................................................................................................. 17
2.2.1 Types of co-simulator ........................................................................................... 17
2.2.2 Components of smart grid co-simulator ............................................................... 20
2.2.3 Methods of co-simulation ..................................................................................... 23
2.3 Smart grid co-simulator modeling approaches ................................................................. 23
2.3.1 Mathematical models ............................................................................................ 24
2.3.2 Simulation modeling ............................................................................................. 26
2.4 Synchronization in smart grid co-simulation .................................................................... 27
2.4.1 Periodic Synchronization ...................................................................................... 28
v
2.4.2 Event-based Synchronization ................................................................................ 29
2.5 Data Exchange in Smart Grid Simulation ......................................................................... 29
2.5.1 Pipes ...................................................................................................................... 30
2.5.2 Shared Memory ..................................................................................................... 30
2.5.3 Sockets .................................................................................................................. 31
2.6 Tool Sets Discussion ......................................................................................................... 31
2.6.1 PSCAD/EMTDC ................................................................................................... 31
2.6.2 OMNeT++ /INET ................................................................................................. 32
2.6.3 MATLAB/Simulink .............................................................................................. 32
2.7 Applications of Smart Grid multi-domain simulator ........................................................ 33
2.7.1 State Estimation .................................................................................................... 34
2.7.2 Small Signal Stability ........................................................................................... 34
2.7.3 Voltage Stability Analysis .................................................................................... 34
2.7.4 Postmortem Analysis ............................................................................................ 34
2.7.5 Transient Analysis ................................................................................................ 34
2.8 Summary ........................................................................................................................... 35
Chapter 3 ....................................................................................................................................... 37
3 Software Implementation ......................................................................................................... 37
3.1 The Power System Module ............................................................................................... 37
3.1.1 Power System Design in PSCAD ......................................................................... 38
3.1.2 EMTDC and C Interface ....................................................................................... 39
3.2 Energy Management System (EMS) ................................................................................ 42
3.3 Scheduler ........................................................................................................................... 43
3.3.1 Create Table Module () ......................................................................................... 45
3.3.2 Create Default Status () ......................................................................................... 45
3.3.3 Rate Module () ...................................................................................................... 45

vi
3.3.4 Search Send Flag Module () ................................................................................. 45
3.3.5 Socket Module () ................................................................................................... 46
3.3.6 Write Database Module () ..................................................................................... 46
3.3.7 Read Database Module () ...................................................................................... 46
3.3.8 Update Output Module () ...................................................................................... 47
3.4 The Communication System ............................................................................................. 47
3.4.1 OMNeT++ ............................................................................................................ 48
3.4.2 INET Framework .................................................................................................. 48
3.4.3 C++ Interface ........................................................................................................ 52
3.5 Summary ........................................................................................................................... 53
Chapter 4 ....................................................................................................................................... 54
4 Test Cases: Microgrid Control and Communication ............................................................... 54
4.1 Study System: Microgrid .................................................................................................. 54
4.1.1 Power Management .............................................................................................. 57
4.1.2 Frequency Control and Synchronization .............................................................. 58
4.1.3 Local Controllers .................................................................................................. 58
4.2 Communication Architecture ............................................................................................ 59
4.2.1 Geni LAN .............................................................................................................. 60
4.2.2 Energy Management System ................................................................................ 60
4.2.3 Communication Channel ...................................................................................... 61
4.3 Simulation Results ............................................................................................................ 62
4.3.1 Performance metrics ............................................................................................. 62
4.3.2 Single-domain simulation ..................................................................................... 63
4.3.3 Fixed-delay Single-domain simulation ................................................................. 63
4.3.4 Multi-domain simulation ...................................................................................... 64
4.4 Impact evaluation .............................................................................................................. 64

vii
4.4.1 Effect of sampling rate on controller .................................................................... 64
4.4.2 Discussion of results ............................................................................................. 69
4.5 Summary ........................................................................................................................... 73
Chapter 5 ....................................................................................................................................... 75
5 Conclusion ................................................................................................................................ 75
5.1 Summary and Conclusions ............................................................................................... 75
5.2 Challenges and Limitations ............................................................................................... 76
5.3 Contributions ..................................................................................................................... 77
5.4 Future Research Directions ............................................................................................... 77
viii
List of Tables Table 2-1 Synchronization methods in some reviewed works. .................................................... 28
Table 2-2: Smart Grid Applications Classified According to Latency Requirement. .................. 33
Table 2-3: Smart grid co-simulation approaches with the pros and cons of each method ........... 35
Table 4-1 Microgrid Data showing the ratings of the DERs, load and line impedance. .............. 56
Table 4-2: Packet Structure of transmitted data, channel capacity, channel types and their
characteristics ............................................................................................................................... 61

ix
List of Figures Figure 1-1: Continuous-time simulation sequence of PSCAD ....................................................... 3
Figure 1-2 Discrete time simulation depicting the execution of queued events which can jump in
time ................................................................................................................................................. 4
Figure 2-1: Smart grid system showing the renewable and non-renewable energy sources, the
control center, and the communication network overlay............................................................. 16
Figure 2-2: Diagram showing the interaction of the components of the smart grid co-simulator20
Figure 2-3: Interactive co-simulation depicting the bi-directional information exchange. ......... 27
Figure 2-4: Non-interactive co-simulation showing unidirectional flow of information. ............ 27
Figure 3-1: System architecture showing the interconnection of the different components that
make up the smart grid. ................................................................................................................ 37
Figure 3-2: Software Architecture of the Co-simulator with all the key components .................. 38
Figure 3-3: Pseudo code for the dynamic buffer managing traffic from different sources going
into the communication network. .................................................................................................. 40
Figure 3-4: Pseudo code of the dynamic buffer managing traffic reception from the
communication network. ............................................................................................................... 41
Figure 3-5: Flowchart showing the working principle of the scheduler with Communication
Network and EMS as black boxes. ................................................................................................ 44
Figure 3-6 TCP Signaling diagram showing connection establishment, connection maintenance
and connection teardown ............................................................................................................. 50
Figure 4-1 Complete diagram of the study microgrid identifying the loads, the DERs, and the
main grid. ...................................................................................................................................... 56
Figure 4-2 Sawtooth Waveform used to regulate the output of the DERs. .................................. 58

x
Figure 4-3: Communication system equivalent of the microgrid showing the interconnection
amongst the key components of the system. .................................................................................. 60
Figure 4-4: Single domain simulation showing the response of the DGs to transient instability
(load shedding) ............................................................................................................................. 65
Figure 4-5:Non-interactive simulation showing the response of the DGs to transient instability
(load shedding) ............................................................................................................................. 66
Figure 4-6: Full co-simulation showing the response of the DGs to transient instability (load
shedding) ....................................................................................................................................... 67
Figure 4-7: Real time simulation of the wireless channel and the power components of the DERs
....................................................................................................................................................... 68
Figure 4-8: Non-real time wireless channel simulation and the reaction of the DERs to load
connection and disconnection ...................................................................................................... 69
Figure 4-9: Pseudocode showing the data structure used by the scheduler during
synchronization ............................................................................................................................. 71

1
Chapter 1
Introduction
1.1 Background Virtually every device around us today is becoming “smart.” Even physical infrastructure like
the power grid is not left behind. The advancement of power systems, to provide greater
consumer-centricity, more efficiency and a smaller carbon-footprint, has motivated the need for
power grid cyber-enablement [1]. Cyber-enablement will no doubt enable high fidelity data
acquisition and processing for effective decision-making. However, for the legacy power grid to
become a smart grid, it must undergo system integration with advanced sensors, high speed
communications and distributed control, which present significant challenges. Two non-
functional challenges of information and communication technology ICT integration are
interoperability and cyber security. According to [2], interoperability represents the ease by
which a system can exchange information with another system. For our discussion here, it
suffices to say that interoperability issues increase with the “distance” between the measurement
source and the application. The distance here is not only geographical, but also has a context or
organizational dimension; thus, if data transverses several networks within, or outside a
regulatory scope, additional interoperability issues may be experienced due to protocol
conversions or communication gateways and network configurations. The second non-functional
aspect of ICT integration is cyber security. In [3], cyber security is extensively discussed and
provides the best example of the dangers of focusing ICT development merely on the function to
be fulfilled.
Researchers and engineers aiming to perform this form of integration often must study the
impact of bringing two such systems together, and this again is not easy because of the inherent
diverse nature of the two systems. The power grid exhibits analog system behavior while the
cyber system is discrete in nature. Continuous-time simulators of power systems are considered
to mimic analog behavior because of the use of fixed time-step with no jump in time during the
simulation process. This means that there is an event for every time-step in the simulation. Also,

2
it is worthy of note that the time-step is determined and set by a user based on the features of the
power system being studied. This behavior is illustrated in Figure 1-1. In contrast, as shown in
Figure 1-2, communication simulators that often model queued events typically can jump in time
and employ a varying time-step that is beyond user control. Here, the system determines when an
event is created and determines whether to cancel or execute the event based on the outcome of
previous events.
The distinct characteristics of each type of simulator makes exploration of a cyber-enabled smart
grid difficult within a common existing framework. Hence, there is a need to develop co-
simulators capable of solving the integration challenges while maintaining the independence of
each of the systems under study, which is the topic of this thesis. This usually involves using a
power simulator, a communication simulator and a simulator capable of rigorous control
behavior manipulations if the need arises. Enabling these separate simulators to work together
and still depict acceptable real system behavior involves overcoming the challenges of
synchronization of the simulation times of the simulators, and data exchange amongst the
systems.
The synchronization problem arises because of the nature of the simulators used in the cross-
domain simulation. As highlighted above, most network simulators such as NS21, NS3,
OPNET, OMNeT++, etc., are discrete event simulators. This means that they are driven by
queued events, which occur at a particular time and marks a change of system state. Between two
consecutive events, it is assumed that the system state is unchanged [4]. This makes it possible
for the system to jump over time from one event to the next. On the other hand, power simulators
such as PSCAD2, PSLF3, etc., are continuous-time simulators that solve differential equations at
fixed time-steps. This step by step execution, otherwise known as continuous-time simulation as
cited above, means that every time-step must be accounted for [4]. Hence, in every fixed time-
1 NS2 and NS3 are communication network simulators; NS3 represents a newer version of NS2.
2 Power System Computer Aided Design (PSCAD) is the graphical user interface for the power simulator.
3 Positive Sequence Load Flow (PSLF) is continuous-time power simulator used mostly for load flow studies.

3
step, an event is executed. This difference in simulation time behavior presents a synchronization
problem which is elaborated more in Section 2.4 of this work.
Figure 1-1: Continuous-time simulation sequence of PSCAD

4
The rest of this chapter is organized as follows. Section 1.2 discusses why we need a co-
simulator and plain explanation of synchronization. Section 1.3 reviews the numerous literature
in this field with emphasis on the merits and limitations of each. Section 1.4 presents the
statement of the problem and objectives. Section 1.5 presents the organization of the thesis.
1.2 Why co-simulator In [5], a microgrid system using only a power simulator and assuming zero end-to-end delay is
implemented. Also, in [6], a communication network simulator is used to simulate the
communication needs of a virtual power system. The difference in the simulation domain of the
two systems as highlighted in [7] has made it difficult to use one simulator to accomplish both
needs. But we also note that while most considerations in power systems is via mathematical
equations, the communication system is a stochastic system, and the randomness it introduces in
the overall behavior of cyber-physical system like microgrid can only be captured by using a co-
Figure 1-2 Discrete time simulation depicting the execution of queued events which can jump in time

5
simulator. Hence, the high interest by researchers in this area. The use of co-simulator also
allows us to achieve the following:
• Domain specific modeling: With multi-domain co-simulator, we have the flexibility of
modeling and designing each of the systems involved in the integration in their respective
domain, thereby making our work easier and modular in nature.
• Well-developed simulators: Each of the simulators involved in the integration has
evolved over time and has large research community that keeps developing and
improving the simulators. Hence, it affords us the benefit of having well tested simulators
with known consistent behavior than developing another one from scratch.
• Component reuse: Another benefit of this integration is the ability to reuse components
that have been developed by others in this field. An example is the INET modules in
OMNeT++ which would have been built from scratch if we had to build our own
simulator.
1.2.1 Synchronization
As highlighted in Section 1.1, the behavior of the federating simulators with different execution
method makes modelling the interaction amongst the different entities difficult as the simulation
time of the various simulators involved in the federation are different. Hence, the co-simulation
design tries to model the practical behavior of the systems involved by ensuring that events are
applied at exactly when they are supposed to happen in reference to the time-stamp. Processing
times by sensors and actuators, propagation and transmission delays incurred by communication
systems all affect the true behavior of the co-simulated system. Hence, application of an event
with a time-stamp less than the simulation time will halt the simulation prematurely, and
triggering an event before the simulation time introduces an error to the modelling process.
Therefore, synchronization is a process of harmonizing the simulation time of the federating
simulators to ensure that events are applied according to their time-stamps without halting the
simulation prematurely or accumulating errors, thereby depicting the behavior of the modelled
systems closely.

6
1.3 Literature Review For the past two decades, there has been growing interest in the development of a smart grid
system as evidenced by the literature in this area [4, 6-16]. However, the topic of smart grid
(power-communications-control) multi-domain simulation remains an open field of study, to the
best of the knowledge of the author. In this section, we will highlight some research that is
closely related to the work in this thesis.
The earliest approach is entitled MESCOS ̶ A Multi-energy System Co-simulator for City district
Energy Systems [17] which is a multi-domain simulation platform that analyzes city district
energy systems with the aim of serving as a tool for the design and control of energy
management systems. By multi-domain, the author refers to the fact that the integrated
simulators can simultaneously run power system and rigorous control system analyses required
for efficient power system management. The work claims to take into account the various
internal and external sources available for city-scale energy systems, including internal
conversion systems and electrical grids. Moreover, the authors state the work can provide
analysis for a variety of energy sources like solar, wind, biogas and the main grid, which is a
positive feature given that the smart grid requires integration of both the traditional power
sources and distributed energy resources (DER’s)4 [18]. The work however does not take into
account the effect of the communication network infrastructure needed to coordinate the
operation of the both the energy management system and the actuators that implement the
control decisions. Therefore, the work lacks the ability to do cyber-related analysis of the power
grid.
Another work in this area is [19]. Here, wireless communication links for microgrid control are
studied. The author investigates the impacts of bit error rate (BER)5, number of hops traversed
and packet drop rate in microgrid control. The power and communication system is simulated in
MATLAB/Simulink. Hence, no integration is involved. The lack of integration, however, makes
it difficult to model and study practical integration challenges. Although MATLAB/Simulink is a
4 DER includes energy sources like Biogas, Solar power, Wind power, etc.
5BER is the tolerable error rate in bits in the communication channel.

7
powerful general-purpose computational tool, it does not have the much-needed functionality of
advanced communication simulators including event driven communication toolboxes.
In [14], the PowerNet co-simulator is proposed using the Modelica power simulator and NS2 as
the communication simulator. The platform can implement real-time co-simulations to
investigate security, reliability and performance of different components of the smart grid.
Although the systems used in the co-simulation have real-time capabilities, they are not allowed
to run simultaneously because of the need to synchronize the simulation time. The design choice
is to use the NS2 to control the Modelica, so that NS2 determines all the time instants at which
communication between Modelica and NS2 should occur. This choice of design has the
following implications:
• The unpredictability and indeterminism of communication networks is supported.
• The unpredictability of the power system is eliminated. This is because, in practice, it is
easier to predict the behavior of physical system than that of communication networks.
Therefore, the time instants can be hard coded into NS2.
The limitation of this design approach is due to the fact that Modelica cannot initiate data
delivery to NS2, which governs this operation. Therefore, exchanging data between Modelica
and NS2 in response to events initiated by the power system alone is not supported. Hence, the
method fails to exploit the parallelism inherent in the co-simulation approach.
Greenbench [4] is another approach to smart grid co-simulation that is related to this thesis.
Here, PSCAD and OMNET++ are used as power and communication simulators respectively.
The co-simulation platform is used to investigate data-centric attacks on a smart grid system. The
attacks are on the confidentiality, integrity and availability of the data. Synchronization between
the simulators is designed to carefully eliminate accumulated errors which would occur if an
event occurred in between the predetermined synchronization time instants. This is achieved by
utilizing the timing capability of self message in OMNET++, which is a timer that helps to set a
pre-determined time for an event. This behavior makes OMNET++ behave like a continuous-
time simulator. To fully utilize this feature, the researchers used a customized software called
interactor which is responsible for switching the operation of the simulators each time the self
message times out. This helps to ensure that the simulation times are synchronized, but it

8
requires practice and experience to set the duration of the self message for every behavior of the
system under study. For instance, for transient study of the power system, the timer duration has
to be shorter than that of state estimation. Also, the data exchange that Greenbench uses is
simple, and it employs the use of buffer files to read and write data between the simulators,
which is more applicable to small-scale power systems. Each physical device in the system has a
buffer file associated with it for the purpose of exchanging data with OMNET++. Now,
employing this technique for a power system with thousands of buses is simply difficult, hence,
scalability is limited.
Another related work is that of the electric power and communication simulator (EPOCHS) [9],
which is a distributed simulation environment composed of NS2, PSLF and PSCAD/EMTDC.
The NS2 serves as a communication simulator, the PSLF as an electromechanical transient
simulator, and PSCAD/EMTDC as an electromagnetic transient simulator. It solves the
synchronization problem among the federating6 simulators by developing a software mediator
called runtime infrastructure (RTI), which is responsible for synchronizing the simulation time of
each of the simulators in every time-step. Though difficult to implement, it is a good approach as
the simulators are equally single threaded simulation engines and can easily adapt to this
approach. One of the setbacks of using this approach is that there must be an exchange of
information between each simulator and the runtime infrastructure in every time-step of the
simulation. So, for a transient analysis in which the time-step is small, it means that the
simulation time for a few seconds, especially for medium to large systems will be significant.
Also, because the synchronization is a simple time-stepped method, if certain events happen
which requires interacting among those simulators, the event has to be buffered in a cache and
wait to be processed until the next synchronization point. This creates room for accumulated
errors and reduce the fidelity of the simulation, especially for time-critical applications.
In order to improve the synchronization mechanism in EPOCHS, the authors in [16] develops a
power system model using discrete events system formalism (DEVS) and integrates it with NS2
so that the federated simulators collectively behave like a discrete event simulator. The goal of
this technique is to make the power system mimic the characteristics of the communication
6 The merging of different simulators to achieve a set objective.
9
simulator so as to make the overall behavior of the two systems compatible and create a seamless
synchronization process. Ordinarily, DEVS would appear to be an improvement in terms of
synchronization. However, the DEVS package employed is a general discrete event system, and
not specific power system modeling. Therefore, users would have to develop their own code
which conforms to the DEVS specification of power system dynamic simulation. This will affect
the reliability of the models and the scalability of the system. Also, since most off-the-shelf
simulators do not use this approach in power system modeling of dynamic simulation, then this
approach cannot be used in distributed simulations.
In [20], a co-simulation platform is developed using OPNET as a communication simulator and
MATLAB/Simulink as a power simulator. The impact of the architecture of information and
communication technology (ICT) on the reliability of wireless area monitoring systems (WAMS)
applications is studied. Here, hierarchical type of control and monitoring is modelled in OPNET,
and the communication delays are tuned to study the sensitivity of phasor measurement unit
based applications. The authors’ detailed modeling of the processes relating to the phasor data
collection is impressive. However, the paper does not address the synchronization method used,
as well as the actual integration of the two simulators.
Reference [21] is an extension of OPNET to simulate wide area communication networks in
power systems. In this scheme, the power system dynamic simulation is modified as a virtual
demander which works in the following sequence;
• Whenever the virtual demander requests to transmit data on the network, it suspends
itself and creates a packet in OPNET.
• Then, OPNET simulates the total communication delay of this packet and report it back
to the virtual demander.
• Finally, the virtual demander reactivates itself and simulates for the duration of the
communication delay before further processing.
While this method is a good way of eliminating accumulated synchronization errors, it is limited
only to one agent, one request scenario. Hence, scalability is an issue as the single-threaded
nature of the platform cannot support complex hybrid system.

10
In [6], the integration of the Virtual Test Bed (VTB) software and OPNET is developed for
simulating remotely controlled power devices in a power system. The synchronization method
used in the paper is a pre-determined time-step synchronization in which a software mediator is
responsible for assigning same time-step for each of the simulators involved in the federation and
allows the simulators to run in turn in every time-step. Here, a software mediator synchronizes
the simulation time of each of the simulators involved in the integration and samples values from
each of the simulators based on a global simulation time-step, making it susceptible to
accumulation errors as in the case of EPOCHS.
Another recent work in this area is [7], which describes Global Event-Driven Co-Simulation
(GECO). GECO introduces the notion of a global event queue, in which all events occurring in
the simulation are stored and queued in a single event list. This method eliminates the problem
experienced in EPOCHS [9] and other similar approaches, because the data exchange occurs at
the exact time it is intended to occur instead of at a synchronization point in the temporal vicinity
of the event. This increases the accuracy and scalability of the co-simulation. GECO uses NS2
and PSLF as the federating simulators and employs middleware called global event queue
written in programming languages C++ and Tcl, to develop the interface for each of PSLF and
NS2 respectively. GECO is used to study the power transmission grid, with emphasis on fault
detection schemes using distance relays. This kind of application is time-critical, so the time
accuracy and the global event queue suits it best. The only drawback to GECO is the complexity
involved in integrating other communication and power simulators to it as it requires modifying
both the simulators and the GECO framework.
Reference [12] is another co-simulation platform that makes use of a global scheduling approach
to solve synchronization challenges encountered by federating simulators. The paper approaches
the synchronization problem by building a queue that mixes the communication and power
events together and determines which simulator is run based on the time stamp of each event. It
involves a novel approach of adjusting the time-step dynamically depending on the accuracy of
the simulation as it progresses. This is a solid approach, but the time adjustment algorithm
requires substantial modification of the simulation engine of the federating simulators, which
requires access to the source code of these simulators, which may be unrealistic. Hence,
integrating other simulators to the platform will be challenging.

11
Thus, based on the former research in this field, we deduce that the following challenges require
the most significant attention for co-simulator design:
• Synchronization of the simulation time amongst the federating simulators: This is
necessary to avoid crashing the simulation by trying to execute events with timestamps
that have either passed the simulation time or ahead of the simulation time.
• Effective data exchange mechanisms between the simulators that is scalable and ease to
use.
1.4 Statement of the Problem and Research Objectives As discussed in the literature review, most of the known methods have the following limitations:
• The method is implemented in a single simulator where one of the systems (either power
or communication network) is made “virtual” thus limiting its practical applicability. A
case in point is [19] in which the power and communication modules were developed in
MATLAB/Simulink, which are not discrete event simulators appropriate for
communication network modeling.
• In addition, some references such as [20] do not account for synchronization of the
simulation time of the simulators, hence, ignoring a major integration issue.
• Most of the techniques involve using a pre-determined time-step for synchronization as in
[9] which results in events being delayed before they are processed. Hence, accumulating
errors, which could reduce the fidelity of the simulation for time-critical simulations like
transient analysis.
• Also, as stated in the literature review, some work such as [4] employ a buffer file for
every physical device in the model for the bi-directional data communication. Hence,
applying this model will not be scalable in terms of the volume of data exchange
required.
• Most of the control decisions are limited only to elementary digital or logic control.

12
• Finally, most of the co-simulation platform developed thus far does not account for the
role of the energy management system or is simply assumed to be working ideally, which
is not practical.
With the above limitations in mind, this research seeks to develop an ICT-Power system
integrator with the following goals:
• To develop an efficient and scalable queued event mechanism that eliminates
accumulated errors inherent in using pre-determined time-step method.
• To add flexibility to the already existing approaches by jointly considering power,
communication and control modeling for multi-domain simulation of smart grid that can
be used to study transient behavior in both distribution and transmission grid overlaid
with communication system. This way, we are able to observe the impact of cyber-
attacks in power systems in real-time, unlike physical systems modeling technique
described in [22] or the networking approach used in [23].
• To develop an effective data exchange mechanism which uses a dynamic buffer with
socket communication. This will ensure that the scale of the system that can be analyzed
can only be limited by the physical attributes of the computer used in the simulation.
• To facilitate efficient data exchange between the simulators by developing a system that
has a short history with the aid of an open source database called SQLite.
1.5 Dissertation Layout The rest of this dissertation is organized as follows.
In Chapter 2, our aim is to identify all the vital components that make up the smart grid system
and their features. We also discuss co-simulation in smart grid with emphasis on real time and
off-line co-simulation. Components of a smart grid co-simulator are then discussed in details.
The chapter also proposes the modeling approaches used in developing a co-simulator for smart
grid. The problem of synchronizing the simulators is discussed along with the various data
exchange approaches available in co-simulation. The chapter then concludes with discussions of
13
the tool sets used in this thesis as well as the various applications of smart grid co-simulator in
smart grid studies.
In Chapter 3, we discuss the detailed implementation of the components that make up our smart
grid co-simulator. Basically, it is divided into four distinct modules: the power system module,
the energy management module, the scheduler and the communication module.
Chapter 4 is where we demonstrate the use of the co-simulator in micro-grid analysis. Many test
cases are run to show the workability of the co-simulator and the advantage of employing full co-
simulation over single domain simulation for a study that involves more than one domain.
In Chapter 5, we critically summarize our contributions, position our work within the field of
study and discuss future research directions.

14
Chapter 2
Co-simulation in Smart Grid When more than one simulator is integrated and executed to achieve a particular modeling
objective, the process is referred to as co-simulation. In this arrangement, there must be a means
for each simulator to communicate with one another. Moreover, based on whether the
simulations are real time or off-line, there may be a need to synchronize simulation time of the
simulators involved in the simulation to avoid trying to execute past events or forcing sequential
time simulators like the power simulator to jump in time to execute future event as this will halt
the simulation. In smart grid studies, this federation of simulators represents a promising
scientific contribution as it enables researchers to study a variety aspects of smart grid operation
which hitherto was not possible as a result of the limitations of single domain simulators. This
discussion is the focus of this chapter.
2.1 Smart Grid System Smart grid presents an idea of a future power system that is designed and built as an
interconnected network of power and electricity systems with a communication infrastructure
overlay. Generally, smart grid is defined as a network for electricity transmission and
distribution systems that uses a bidirectional communication between customer, power plant and
control center in order to improve efficiency by optimizing the power supply and demand. The
smart grid is developed based on Internet protocols, open standards, and compatibility principles.
In order to appreciate the concept of smart grid, it is better to try and understand the
shortcomings of the traditional power system. The primary duty of the electrical power system is
the production and distribution of electricity to customers in order to satisfy the load demands.
But of note is the fact that the electrical power system is made up of both centralized and
decentralized power plants, transmission and distribution grids as well as loads. And a traditional
power system has a vertically integrated scheme with centralized generation, distributed
consumption, limited interaction and regulatory frameworks that are not coordinated for mutual
advantage. The traditional grid can be characterized by:
15
• Large conventional power plants;
• Technically optimized for regional power adequacy;
• Centralized control;
• Limited cross-border interaction;
• Technology that is almost 100 years old.
Now, the liberalization of the electricity market means there is a need for improved data
exchanges between these components in order to guarantee efficient management of the system.
But because the present power system was built as a centralized system due to the ease of
controlling the large power plants which are responsible for the production of electricity,
balancing power supply and regulating system frequency [10], this has become an onerous task
to achieve. Now, in order to incorporate a more flexible and decentralized power system, the
concept of a smart grid has been introduced. This seeks to develop more distributed energy
resources from mostly renewable sources and integrate them into the traditional power system.
Unfortunately, these renewable sources are intermittent in nature. Therefore, they require robust
control and coordination among the participating plants. These changes in power system
structure result in three main goals:
• Reduction in greenhouse gas emission;
• Increased usage of renewable energy sources;
• Improved energy efficiency.
16
2.1.1 Components of Smart Grid
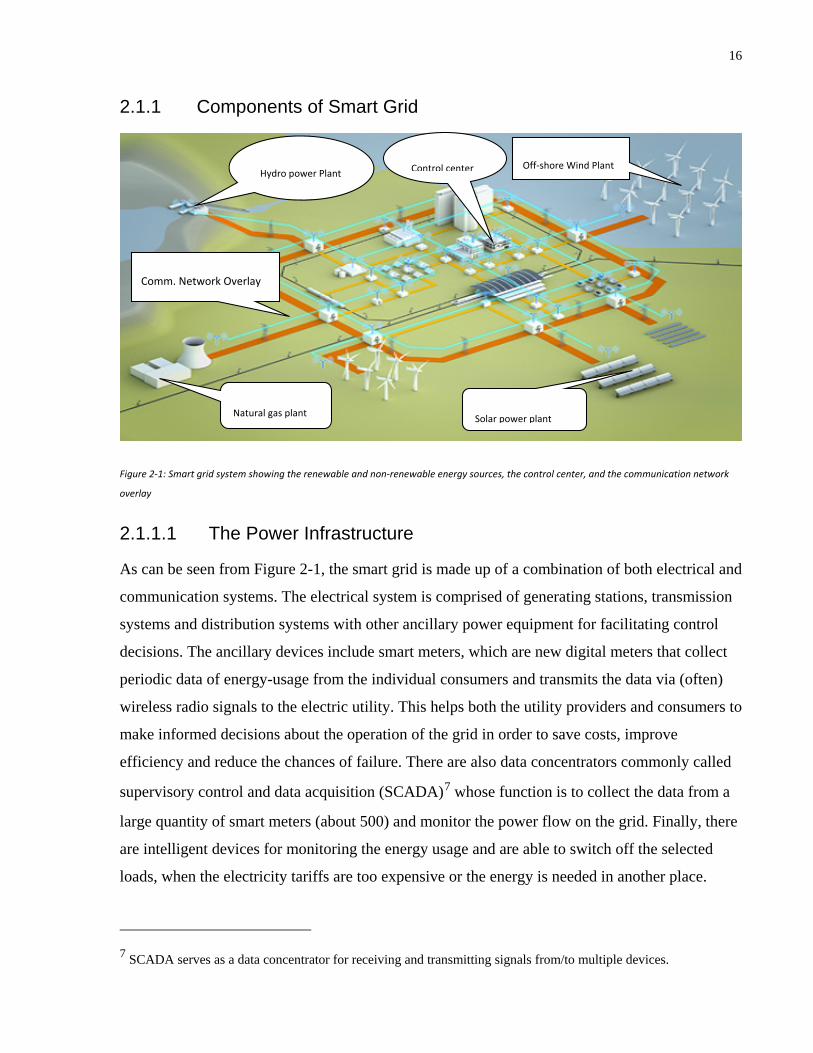
Figure 2-1: Smart grid system showing the renewable and non-renewable energy sources, the control center, and the communication network
overlay
2.1.1.1 The Power Infrastructure
As can be seen from Figure 2-1, the smart grid is made up of a combination of both electrical and
communication systems. The electrical system is comprised of generating stations, transmission
systems and distribution systems with other ancillary power equipment for facilitating control
decisions. The ancillary devices include smart meters, which are new digital meters that collect
periodic data of energy-usage from the individual consumers and transmits the data via (often)
wireless radio signals to the electric utility. This helps both the utility providers and consumers to
make informed decisions about the operation of the grid in order to save costs, improve
efficiency and reduce the chances of failure. There are also data concentrators commonly called
supervisory control and data acquisition (SCADA)7 whose function is to collect the data from a
large quantity of smart meters (about 500) and monitor the power flow on the grid. Finally, there
are intelligent devices for monitoring the energy usage and are able to switch off the selected
loads, when the electricity tariffs are too expensive or the energy is needed in another place.
7 SCADA serves as a data concentrator for receiving and transmitting signals from/to multiple devices.
Hydro power Plant Off-shore Wind Plant
Comm. Network Overlay
Natural gas plant Solar power plant
Control center
17
From the foregoing, it’s obvious that these devices need some means of communication
considering they are usually located some distance away from one another. And even when they
are close, they may not be operating on the same protocol. And that is the discussion of Section
2.1.1.2.
2.1.1.2 The Cyber Infrastructure
Overlaying the power infrastructure is the communication network which is responsible for the
smooth operation of the power grid by ensuring efficient data exchange amongst the various
devices and generators connected to the power grid. The communication could be realized via a
variety of media including radio, fiber optics, power line carriers, telecommunication cables or a
combination. The cyber infrastructure will ideally possess some features like plug and play
capability, possibilities for mapping to different physical layers, and expandability of the data
models and introduction of new models in accordance with the new and enhanced
communication tasks. In Figure 2-1, it demonstrates how a communication overlay can run
across the span of the power grid to provide communication and coordination amongst the DERs
in the power grid. This helps to make the smart grid a horizontally configured system. Hence, all
the DERs can participate in meeting the power demand on the grid and as well regulate the
frequency of the power system to ensure a stable operation. This capability enables engineers
and researchers to design a hierarchical control approach in which different levels of control can
be applied, hence, optimizing the operation of the system.
2.2 Smart Grid Co-Simulator
2.2.1 Types of co-simulator
A smart grid co-simulator is a software Integrator; that helps to simulate the practical smart grid
operation by enabling different federated simulators to run concurrently or serially, and in
coordination with each other to depict a desired scenario of the smart grid under study. This is
important as the two main components that form the smart grid have different simulation
modeling characteristics as we have highlighted in the introduction of the thesis. However, the
software Integrator is classified into two types based on whether it is real-time and off-line.
18
2.2.1.1 Real-time co-simulator
For decades, simulators played a major role in the design and planning of electrical power
systems. From aerospace studies, transmission line layout design, home electronics design to
optimization of the motor drives in transportation, simulation has helped us to imagine, plan,
design and implement our thoughts before implementing the ideas physically. However, the
rapid evolution of simulation tools, primarily due to decreasing cost of computing devices and
increasing capability of these devices to solve more complex problems with less time, greatly
provides a new vista in the simulation world. The reduced cost has equally made simulation tools
more accessible by a wide variety of audiences. According to [24], a simulation is the
representation of the operation or features of a system through the use or operation of another.
During real-time simulation, the accuracy of the computations not only depends upon precise
dynamic representation of the system, but also on the length of time used to produce results [24].
For a real-time simulation to be valid, the real-time simulator used must accurately produce the
internal variables and outputs of the simulation within the same length of time that its physical
counterpart would. In fact, the time required to compute the solution at a given time-step must be
shorter than the wall clock duration of the time-step. This permits the real-time simulator to
perform all operations necessary to make a real time simulation relevant, including driving inputs
and outputs (I/O) to and from externally connected devices.
For a given time-step, any idle-time preceding or following simulator operations is lost; as
opposed to accelerated simulation, where idle time is used to compute the equations at the next
time-step. In such a case, the simulator waits until the clock ticks to the next time-step. However,
if simulator operations are not at all achieved within the required fixed time-step, the real-time
simulation is considered erroneous. This is commonly known as an “overrun.” Based on these
basic definitions, it can be deduced that a real-time simulator is performing as expected if the
equations and the states of the simulated system are solved accurately, with an acceptable
resemblance to its physical counterpart, without the occurrence of overruns. Real-time digital
simulation is based on discrete time-steps where the simulator solves model equations
successively. Proper time-step duration must be determined to accurately represent the system
frequency response up to the fastest transient of interest. Simulation results can be validated
when the simulator achieves real-time without overruns. Basic functions performed in each time-

19
step include; read input and generate output, solve model equations, exchange results with other
simulation nodes, and wait for the start of the next step. Therefore, in real time co-simulator,
both the power and communication simulator have the capability of doing real time simulation.
This type of simulation helps us to understand two main issues:
• Whether the proposed design or algorithm in the simulation can be digitally implemented
in an industrial hardware platform.
• The effects of practical issues, including noise, non-idealities associated with analogue-
to-digital, sampling rate of digital controllers, which ordinarily would not manifest in off-
line simulation.
2.2.1.2 Off-line co-simulator
For digital simulation, it is assumed that a simulation with discrete-time and constant step
duration is performed. During discrete-time simulation, time moves forward in steps of equal
duration. This is commonly known as fixed time-step simulation [24]. It is important to note that
other numerical solving techniques exist that use variable time-steps. Such techniques are used
for solving high frequency dynamics and nonlinear systems because of its accuracy and ability to
solve algebraic loops. The advantages derived from using variable-step solvers are obtained on
the condition that the solvers take the required processing time to achieve the specified accuracy,
hence, the processing time cannot be easily controlled and varies for each time-step. This makes
variable-step solvers unsuitable for hard real-time simulation requiring to maintain a fixed
processing time. To solve mathematical functions and equations at a given time-step, each
variable or system state is solved successively as a function of variables and states at the end of
the proceeding time-step. During a discrete-time simulation, the amount of real time required to
compute all equations and functions representing a system during a given time-step may be
shorter or longer than the duration of the simulation time-step. This technique is implemented
using two methods: one in which the computing time is shorter than the fixed time-step (also
referred to as accelerated simulation) and one in which the computing time is longer. These two
situations are referred to as off-line simulation. In both cases, the moment at which a result
becomes available is irrelevant. Typically, when performing off-line simulation, the objective is
to obtain results as fast as possible. The system solving speed depends on available
computational power and the system’s mathematical model complexity.

20
2.2.2 Components of smart grid co-simulator
Figure 2-2: Diagram showing the interaction of the components of the smart grid co-simulator
2.2.2.1 Power Simulator
A smart grid consists of energy sources, transmission networks and distribution components, all
containing of both physical components and ICT. The power generators are comprised of a
combination of thermal power plants, hydro power plants, solar power plants, wind power plants,
biogas power plants, etc. The transmission system consists of the towers, underground or
overhead cables, and the substation step up or step down transformers, etc. And the distribution
system has the feeders, step down transformers, cables, insulators as well as some form of
distributed energy sources as its components. In modeling smart grid systems, these components
need to be captured in the simulation. Therefore, in our federation of simulators, we include a
simulator capable of handling all the power modeling, and simulation needs of the multi-domain
21
system with regard to the power system off-line simulation in time-domain. In our case, we
incorporate PSCAD/EMTDC, which is where the design and implementation of the physical
power components of the smart grid is done. It has a graphical user interface which makes
human interaction with the simulator easier, and enables the design, implementation and
visualization of the results of the simulation. EMTDC is the simulation engine of the simulator,
and it is responsible for translating the models designed in PSCAD into equations and carry out
the computation. Finally, results are transmitted back to PSCAD for visualization. The choice of
PSCAD/EMTDC is mainly because our interest is in transient simulation studies and
PSCAD/EMTDC is among the few power simulators with the capabilities to carry out such
simulation. It can solve power systems with time ranging from nanoseconds to seconds but our
interest is in the transient studies which falls under the milliseconds range.
2.2.2.2 Communication Simulator
Different distributed resources in smart grid are able to coordinate their actions in controlling the
grid frequency and meeting power demand need because of the communication network overlay
in the grid. Usually, communication networks of different protocols are used to regulate the
transmission of information in smart grid. It could include wireless, wired, power line
communication, etc., It could also be characterized as a high or low bandwidth network
depending on the specification of the system under study. Now, modeling and studying the
statistical nature of communication network requires a communication simulator incorporated
into the multi-domain simulation. Therefore, to solve this need, we include a communication
network into the multi-domain simulator so as to handle all the modeling, design and
implementation of communication networks in the smart grid. In Figure 2-2, the communication
simulator is OMNET++ and it is this simulator that makes the grid more intelligent. This is
because, a traditionally centralized grid can be converted to a distributed grid with multiple
control structures to enhance efficiency, scalability and security of the power system. The
communication simulator provides basic graphical interfaces like start, stop and pause. The
INET is a framework built above OMNeT++ that provides Internet specific support for both
wired and wireless communication simulations. The IED (Intelligent Energy devices) as well as
the network topology is built into the communication simulator using models derived from INET
framework.

22
2.2.2.3 Control Simulator
Managing a power system involves some decision-making. Some are very basic decisions that
involve using a digital or logical controller. Others are complex, requiring more flexible
computations. Because of the distributed nature of the smart grid, some rigorous energy
management systems are installed to regulate and control the numerous distributed energy
resources attached to the grid. This is necessary as all of the energy sources participate in
regulating the frequency of the grid, and meeting the energy demand on the grid. Hence, in our
co-simulation platform, we incorporate a computational software which is capable of handling
all the specialized control features which ordinary power or communication simulator cannot
handle. In smart grid, a hierarchical control architecture is a common feature in which the
highest level of control participates in power management optimization and sends reference
signals to lower level controllers that implement the decisions. Modeling this top level controller
requires flexible computational software such as MATLAB/Simulink. Therefore, in a bid to
make our co-simulator versatile, we include MATLAB/Simulink in our federation of simulators
to solve the control engineering related problems.
2.2.2.4 Scheduler
In our federation of simulators, the power simulator, the communication simulator and the
control engineering simulator have been identified, but how they work together to make the
simulation realizable requires another piece of software which we call a scheduler. This software
is responsible for regulating the interaction amongst the federating simulators by determining
when each of them runs, imports data from each of them, processes the data, stores the data when
necessary, and exports the data to any of the simulator that needs it. It is also in this software that
the configuration of the sensor rates of the power system measurement is done. It is independent
of any of the simulators and can be built in any language. However, we program the software in
C language and embed it into the federation. The scheduler has an open source database called
SQLite, which is used to provide short history for the system. Providing the history of the system
is necessary in our design in order to enable us to eliminate errors which usually occur in many
synchronization processes highlighted in the previous chapter. The choice of employing the C
language for programming the software is for ease of integration with the rest of the simulators
as each of them has Application Programmable Interface (API) that can interact with C/C++
source files.

23
2.2.3 Methods of co-simulation
When we carry out distributed simulation, there is typically a defined way for data exchange
amongst the various components. This can be categorized as interactive and non-interactive co-
simulation.
2.2.3.1 Interactive co-simulation
Otherwise known as full co-simulation, this is a type of co-simulation in which the federating
simulators dynamically exchange data amongst themselves as the simulation progresses. Here,
there is full to and fro movement of information among the simulators based on design
instructions. Hence, dynamic activities in the systems involved in the federation can be modelled
and captured in the simulation [9].
2.2.3.2 Non-interactive co-simulation
As the name suggests, this type of simulation captures only dynamic activities in one of the
simulators while the other simulator is modelled as a static system. Usually, the data in the
simulator, which models the static system is extracted and stored before the dynamic simulator is
run. The data is then applied to the simulator, which models the dynamic system as the
simulation progresses according to the design instructions. Example of this scenario is a co-
simulation involving a communication network and power system in which delay values are
extracted from the communication simulator, saved and applied to the power simulator by hard
coding the values or using buffer files and the power simulator picks the delay values as the
simulation progresses. Here, disruptions, failures, etc., in the power system model can easily be
captured, but that is not the case with the communication network model which maps the power
system under study.
2.3 Smart grid co-simulator modeling approaches In order to carry out studies on smart grid, we first need to develop a model, solve or implement
the model and check whether we have an acceptable result depending on our interest of study. In
doing this, so many approaches are adopted in developing the co-simulator that will help us solve
the smart grid problem. Some of the methods are used alone, and some in conjunction with one
another. But the two major approaches adopted in developing a co-simulator are: mathematical
models and empirical models.

24
2.3.1 Mathematical models
The general procedure for predicting the behavior of a system is modeling. In this method, we
build models that predict a system's behavior. A model of a system represents a surrogate whose
behavior mimics that of the system. Models are classified into two: physically built and
mathematical [25]. One of the most commonly used models today is a mathematical model, since
they are the most adaptable and inexpensive. In specific applications, mathematical models
consist of computer codes that are easily modified to accommodate fluctuations in system
properties. Mathematical models are a blend of scientific and technological knowledge with the
aim of predicting system performance. Such knowledge is, thereby, incorporated into the
computational codes that the computers execute in model applications. At present, mathematical
models founded on numerical simulation make it easy to study complex systems and natural
phenomena that otherwise would be very expensive, harmful, or even impossible to study by
direct experimentation [25]. From this perspective the significance of mathematical and
computational modeling is clear as it presents the most efficient and effective means of
predicting the behavior of both natural and artificial systems of human interest. This approach is
adopted in studying complex systems like weather, power systems and even used in the oil and
gas industry. Mathematical models are made up of relationships and variables. Relationships can
be described by operators, such as algebraic operators, functions, differential operators, etc.,
while variables are abstractions of system parameters of interest, which can be quantified.
Mathematical models can be classified in the following ways:
2.3.1.1 Linear and nonlinear models
A system is said to be linear if the mathematical model of the system is based on the use of a
linear operator. Hence, if all the operators in a mathematical model exhibit linearity, the resulting
mathematical model is defined as linear. A model is considered to be nonlinear otherwise. The
definition of linearity and nonlinearity is dependent on context, and linear models may have
nonlinear expressions in them. For example, in a statistical, linear model, it is assumed that a
relationship is linear in the parameters, but it may be nonlinear in the predictor variables.
Similarly, a differential equation is said to be linear if it can be written with linear differential
operators, but it can still have nonlinear expressions in it. In a mathematical programming model,
if the objective functions and constraints are represented entirely by linear equations, then the

25
model is regarded as a linear model. And if one or more of the objective functions or constraints
are represented by a nonlinear equation, then the model is known as a nonlinear model [26].
The presence of nonlinearity in system model always complicates the study of the system and
makes it more difficult to study than linear systems. Usually, the principle of linearization is used
to simplify the system and solve it using linear methods. Although, it should be noted that
linearization does not hold the solution to every nonlinear model, especially the ones related to
irreversibility.
2.3.1.2 Static and dynamic models
This is also called steady state (static) and dynamic system. While dynamic model accounts for
time-dependent changes in the state of the system, a static model calculates the system in
equilibrium, and thus is time-invariant. Common representation of dynamic models is via
differential equations. These kind of models are used to model system stability, system
optimization, etc.
2.3.1.3 Deterministic and stochastic models
In a deterministic model, every set of variable states is uniquely determined by the parameters in
the model and by sets of previous states of these variables; therefore, the output of the model is
always consistent given a set of initial conditions. Conversely, in a stochastic model, randomness
is always present, and variable states are not described by unique values, but rather by
probability distributions [27]. In summary, given initial conditions, output of deterministic model
can be predicted with a high degree of accuracy, but that is difficult for the stochastic model.
Example of a stochastic process is the delay experienced in a communication network while
Newton’s law of physics is a case of deterministic systems.
2.3.1.4 Discrete and continuous models
A discrete model treats objects as isolated sets, such as the particles in a molecular model or the
states in a statistical model; while a continuous model represents the objects in a continuum of
possible states, such as the velocity field of fluid in pipe flows, temperatures and stresses in a
solid, and electric field that applies continuously over the entire model due to a point charge.
Discrete models represent an instant in time when an event occurs; in between events, the state
26
of the system is assumed constant. Whereas in continuous models, the events are from a
continuum and thus are dependent.
2.3.2 Simulation modeling
A simulation is an applied methodology that can describe the behavior of a system using either a
mathematical model or a symbolic model. It is also defined as the imitation of the operation of a
real-world process or system over a period of time [28]. When the real system cannot be
involved, simulation becomes the obvious choice. And the real system may not be involved
because of the following reasons:
• It may not be accessible,
• It may be dangerous to engage the system,
• It may be unacceptable to engage the system, or
• The system may simply not exist.
So to counter these objections, a computer will "imitate" operations of these various real-world
facilities or processes. In the field of distributed or federated simulation, two major types of
simulation are identified: interactive and non-interactive co-simulation.
2.3.2.1 Interactive simulation
Interactive simulation is a special kind of physical simulation, often referred to as a human in the
loop simulation, in which physical simulations include human operators, such as in a flight
simulator or a driving simulator. However, if human operators are replaced by another simulator,
the system is termed a distributed simulation or a co-simulation. Here, the dynamics inside any
of the simulators is shared amongst the federating simulators according to a defined data
exchange policy during the course of the simulation. This could be real-time or off-line, but the
most important feature is that each simulator reacts to both its own dynamics and that of other
federating simulators. Hence, there is a bi-directional flow of information during the simulation.
This is illustrated in Figure 2-3 below.

27
Figure 2-3: Interactive co-simulation depicting the bi-directional information exchange.
2.3.2.2 Non-interactive simulation
When there is only one direction of information flow, the co-simulation is said to be non-
interactive. Under this condition, simulator A transfers data to simulator B when it needs it, but
the converse is not true. Hence, while the output of simulator B is a product of its own dynamics
and that of the external simulator, the output of simulator A entirely depends on its own
dynamics. Figure 2-4 demonstrates this type of relationship.
Figure 2-4: Non-interactive co-simulation showing unidirectional flow of information.
2.4 Synchronization in smart grid co-simulation When more than one simulator is involved in a simulation, a problem of synchronizing the
simulation time of the simulators arises. This is necessary as we model practical scenarios in
which we cannot process an event in which its time has passed nor can we process an event in
which its time has not reached as this would result in incorrect modeling of the scenarios
involved or binging the simulators to an unexpected halt. Therefore, the challenge in using off-
line simulator is to process each event at exactly the timestamp it bears. When real-time
simulators are used, this challenge is integrally taken care of as the simulation time is same as
wall clock time. Hence, no need for synchronization. However, off-line simulators offer more
scalability than real-time simulators. Hence, the need for a rigorous process of synchronizing the

28
simulation time of the simulators. To solve this problem, many ideas are canvassed as
enumerated in the Table 2-1 below.
Table 2-1 Synchronization methods in some reviewed works.
Components Synchronization
EPOCHS[9] PSCAD, PSLF, NS2 Periodic
ADEVS[16] Adevs,NS2 Event-based
[20] Simulink, OPNET Not addressed
VPNET[6] Virtual Test Bed, OPNET Periodic
PowerNet [14] Modelica, NS2 Periodic
[21] OPNET only, Virtual Power System Delay estimation
SCADA CST [29] PowerWorld, RINSE Non-interactive
TASSCS [30] PowerWorld, OPNET Non-interactive
GECO [7] PSLF, NS2 Event-based
As can be seen from Table 2-1, the synchronization method can broadly be classified into two
types: periodic and event-based synchronization.
2.4.1 Periodic Synchronization
A situation in which there is an explicit synchronization time defined before the simulation starts
is called periodic synchronization. Here, the federated simulators are allowed to run
simultaneously, and periodically communicates with one another at every synchronization step.
Usually, a run time infrastructure which acts as a coordinator is embedded into the federation to
coordinate this data exchange and ensure that the simulation time of each of the simulators is
synchronized with the global synchronization time [9].

29
2.4.2 Event-based Synchronization
In some cases, there is no explicit defined synchronization point and the simulation time of the
simulators must not be synchronized to any reference. Rather, an event queue is developed which
stores events according to their timestamps. Here, the queue is made up of events from different
simulators and a scheduler determines when each event is processed and by which simulator.
This way, the simulators take time to run according to which event is next on the queue. This has
so many advantages as it eliminates accumulated errors inherent in periodic synchronization and
also removes the expensive process of building a runtime infrastructure that synchronies the
simulation time of each of the simulators involved in the simulation. Reference [7] uses this
method and it proved very effective in eliminating the most demerits of the periodic
synchronization experienced in [9].
2.5 Data Exchange in Smart Grid Simulation In distributed computing, simulation, system integration, etc., the communicating devices usually
have a means of getting access to data held by other devices in the federation. This could be in
the form of file system access, shared memory, windows pipes or sockets, etc. In our model for
instance, the devices in PSCAD/EMTDC will generate data that would be passed to OMNET++
or MATLAB/Simulink for processing. And when these simulators are done with processing of
the data, a set of command or control instructions are sent back to the devices in
PSCAD/EMTDC for necessary action. This task can be accomplished in many ways, but
prominent among them is the method used by [9] in which a Runtime Infrastructure is built to
manage the data exchange between different simulators involved in the simulation. Also, Globe
Scheduler is implemented by [7] by creating a discrete time-event based schedule that uses
timestamps to sort the events and processes them accordingly. While these methods are efficient,
their efficiency is low [4]. To increase the efficiency of this process, it would be better to employ
the use of Inter-Process Communication (IPC) to manage data exchange between these
simulators as it has been the default way of making stand-alone process communicate with one
another. It is fast, it is efficient and it can support real time transmission. Next, we discuss
different implementations of IPC. It simplifies the division of labor among processes, simulators
or computers in a network.

30
2.5.1 Pipes
In computer networking, a pipe is conceived of as an information conduit. It is assumed to have
two ends-one where the information is read, and one where information is written to. It is also
called a special FIFO8 file because of how it saves information in memory. It could also be
simplex or bi-directional. When it is a simplex pipe, only one end allows reading of data while
the other end allows writing of data. On the other hand, a bi-directional pipe allows reading and
writing of data from both ends. Two major classifications of pipes are: anonymous pipe and
named pipe [31].
• Anonymous pipe: A traditional Unix-like pipe that is used for transfer of information
from parent to child processes. Hence, it is only process persistent and dies when the
process dies and is not used for communication across a network. Also, it is a simplex
pipe, i.e. it only allows a unidirectional flow of information.
• Named pipe: It could be simplex or duplex and is used for communication between a pipe
server and client(s). It is system persistent and can be used for communication over the
network and locally. The term pipe server refers to the creator of the named pipe and pipe
client refers to processes that connect to the instance of the named server. In order to
allow multiple clients to use the named pipes simultaneously, instances of the named
pipes are created which share the same name, but have different buffers and handles,
which are used to provide communication between client/server separately.
2.5.2 Shared Memory
This uses a file mapping scheme which allows multiple processes to see the contents of a file as
if they were a block of memory in the process's address space. To accomplish this, each process
that wishes to access the same file mapping is given a pointer to memory in its own address
space which can be used to access the contents of the file. And to avoid concurrent access to the
file by multiple processes, a file locking system like semaphore is always implemented which
provides synchronization and prevents data corruption. In order to make the file mapping file to
8 FIFO is a special access technique which ensures First In, First Out for data in memory.

31
be seen as a shared memory block, a system swapping file is named during the file-mapping
object creation. This enables other processes to access the same block of memory by opening
same file-mapping object. While this is an efficient IPC scheme, its scope is limited only to a
local computer and cannot be used over the network.
2.5.3 Sockets
A protocol independent interface that is used both in windows and UNIX based systems.
Although the implementation details for each case is different, the underlying principle is the
same as both make use of the communication capabilities of the underlying protocols. A socket
is one endpoint of a two-way communication link between two programs running on the
network. A socket is bound to a port number so that the TCP layer can identify the application
which is the data sink. This process usually involves one or more clients and a server. The
development of most socket Application Programmable Interfaces (APIs) is based on the
standard popularized by Berkeley Software Distribution (BSD). It has become the most popular
means of inter-process communication, especially in a large networked system because of its
flexibility and efficiency. It handles both local and over the network communication efficiently
and this is the scheme we implement in our work.
2.6 Tool Sets Discussion In a distributed simulation, more than one simulator is usually involved in accomplishing the
task. In our own case, we federate three simulators with the PSCAD/EMTDC serving as a power
simulator, the OMNeT++ serving as a communication simulator, and the MATLAB/Simulink to
be used as a control engineering simulator. Below is a brief description of each.
2.6.1 PSCAD/EMTDC
PSCAD is the graphical user interface to the simulation engine called EMTDC. EMTDC is
developed to handle electromagnetic transient simulation, hence can capture dynamics in the
power systems from microseconds to seconds. PSCAD being the graphical interface, is where
the schematic construction of a circuit, running of a simulation, analysis of results and exporting
of the data to third party software for further processing is handled. It has online plotting
functions as well as meters and controls which could be used to modify the simulation
constraints during the run and observe the effects of such changes. The simulator has a pre-
32
programmed and tested simulation models, comprising of simple control functions, passive
elements like resistors, as well as complicated models like transmission lines and cables. To
extend the flexibility of using the simulator, it allows users the freedom to build their own
models in either FORTRAN or C programming language and incorporate it in the model. And it
is this capability that we will utilize in the development of our federated simulator. The choice of
PSCAD is based on its capability to capture transient dynamics which is our target area.
2.6.2 OMNeT++ /INET
OMNeT++ is an object-oriented, discrete event simulation framework. Its modular architecture
has been exploited in developing and simulating models in various disciplines outside
communication engineering. Some of the areas in which it has been used includes but not limited
to validating hardware architecture, protocol modeling, wired and wireless network
communication modeling, and other general modeling and simulation architectures that are
modular and discrete event driven. OMNeT++ provides the infrastructure for writing the
simulation, but not a simulator on its own. It only provides reusable modules which are
hierarchically designed for the user to assemble as desired to facilitate the simulation. INET
framework is an example of one of the reusable modules that is specifically designed for TCP/IP
and UDP simulation in OMNeT++ and serves as the underlying framework in our models.
2.6.3 MATLAB/Simulink
MATLAB is a high-level language that handles visualization, programming and numerical
computation. It is used to develop algorithms, create applications, do data analysis, etc. It has in
built functions and numerous tools that aid in designing models, running simulations and
implementing wide range of ideas in many disciplines such as communication and signal
processing, control engineering, finance, image and video processing, etc. MATLAB equally has
a rich Application Programmable Interface for integrating models developed in other languages
like C/C++ or Java, and this flexibility has made MATLAB one of the most popular
computational software. In our case, it is used in the energy management system to optimize the
set point of the distributed generators.
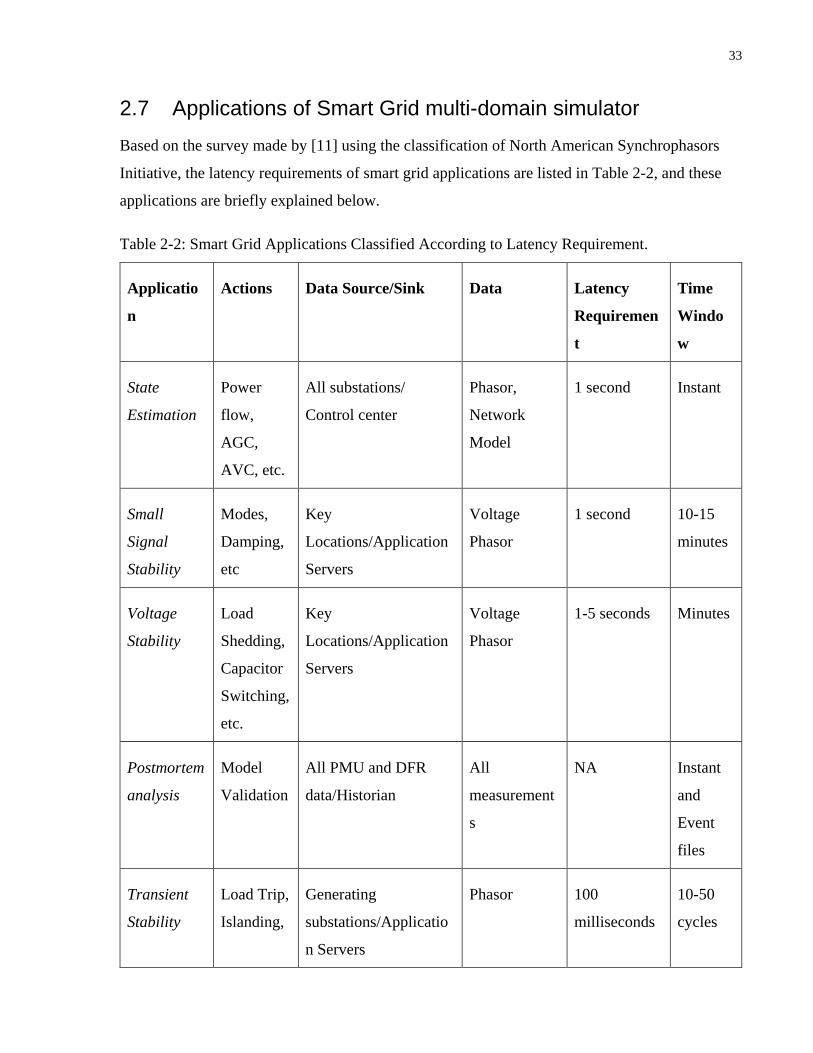
33
2.7 Applications of Smart Grid multi-domain simulator Based on the survey made by [11] using the classification of North American Synchrophasors
Initiative, the latency requirements of smart grid applications are listed in Table 2-2, and these
applications are briefly explained below.
Table 2-2: Smart Grid Applications Classified According to Latency Requirement.
Applicatio
n
Actions Data Source/Sink Data Latency
Requiremen
t
Time
Windo
w
State
Estimation
Power
flow,
AGC,
AVC, etc.
All substations/
Control center
Phasor,
Network
Model
1 second Instant
Small
Signal
Stability
Modes,
Damping,
etc
Key
Locations/Application
Servers
Voltage
Phasor
1 second 10-15
minutes
Voltage
Stability
Load
Shedding,
Capacitor
Switching,
etc.
Key
Locations/Application
Servers
Voltage
Phasor
1-5 seconds Minutes
Postmortem
analysis
Model
Validation
All PMU and DFR
data/Historian
All
measurement
s
NA Instant
and
Event
files
Transient
Stability
Load Trip,
Islanding,
Generating
substations/Applicatio
n Servers
Phasor 100
milliseconds
10-50
cycles
34
Generatio
n Trip
2.7.1 State Estimation
This provides an internal state of the given power system using measurements from the PMUs. It
tries to minimize the effects of corrupt or bad data on the computation of the system state.
2.7.2 Small Signal Stability
The ability of the power system to maintain synchronism when subjected to small disturbance
refers to small signal stability. It’s an event that occurs over time and collecting signals from key
locations, and observing mode damping, preventive measures can be taken to forestall the small
signal instability.
2.7.3 Voltage Stability Analysis
Deficiency in reactive power in an area can easily cascade and lead to system failure. Therefore,
voltage stability studies tries minimize the occurrence of this by taking voltage measurement in
an area and using VAR balancing or Islanding as a stabilizing measure. The distance that usually
exists between the source of the measured data and where it is processed implies that an effective
and reliable communication system is vital in this study. Therefore, this forms a core part of
smart grid applications that should benefit from multi-domain simulators like the one proposed
in this thesis.
2.7.4 Postmortem Analysis
Latency requirement is not applicable to this application, and it uses PMU data as well as data
from digital fault recorders (DFR) to update the engineering setting of the system.
2.7.5 Transient Analysis
This relates to the speed and internal angles of the generators in a power system but for
microgrid that is not using synchronous machines, it refers to the behavior of the system when it
is subjected to heavy transient disturbances such as loss of large loads or loss of generation. The

35
latency is small and the system requires fast control scheme in order to prevent it from becoming
transiently unstable.
2.8 Summary In this chapter, we described various aspects of smart grid co-simulation ranging from its
individual components to a variety of classifications. We provided a detailed discussion of
several modeling approaches in smart grid co-simulation. Then, the synchronization techniques
that have been used in smart grid studies were discussed as well as the data exchange options
that are most prevalent. Finally, we discussed the tool sets used in this work as well, and
provided the classification of smart grid application based on latency requirements. The table
below provides the key points of the two simulation methods.
Table 2-3: Smart grid co-simulation approaches with the pros and cons of each method
Simulation approaches Merits Demerits
Real-time co-simulation 1. No synchronization
required.
2. Could be faster for
systems with less
switching and non-
idealities.
1. Does not solve
algebraic loops.
2. Uses fixed time-steps,
hence knowledge of
appropriate time-step
is required.
Off-line co-simulation 1. Uses variable-step to
speed up the
simulation.
2. Better accuracy.
3. Solves algebraic
loops.
4. Higher numerical
stability.
1. Tolerance range and
type of solver must be
provided.
2. Synchronization is
required.
3. Uses fixed time-steps
for some systems.

36
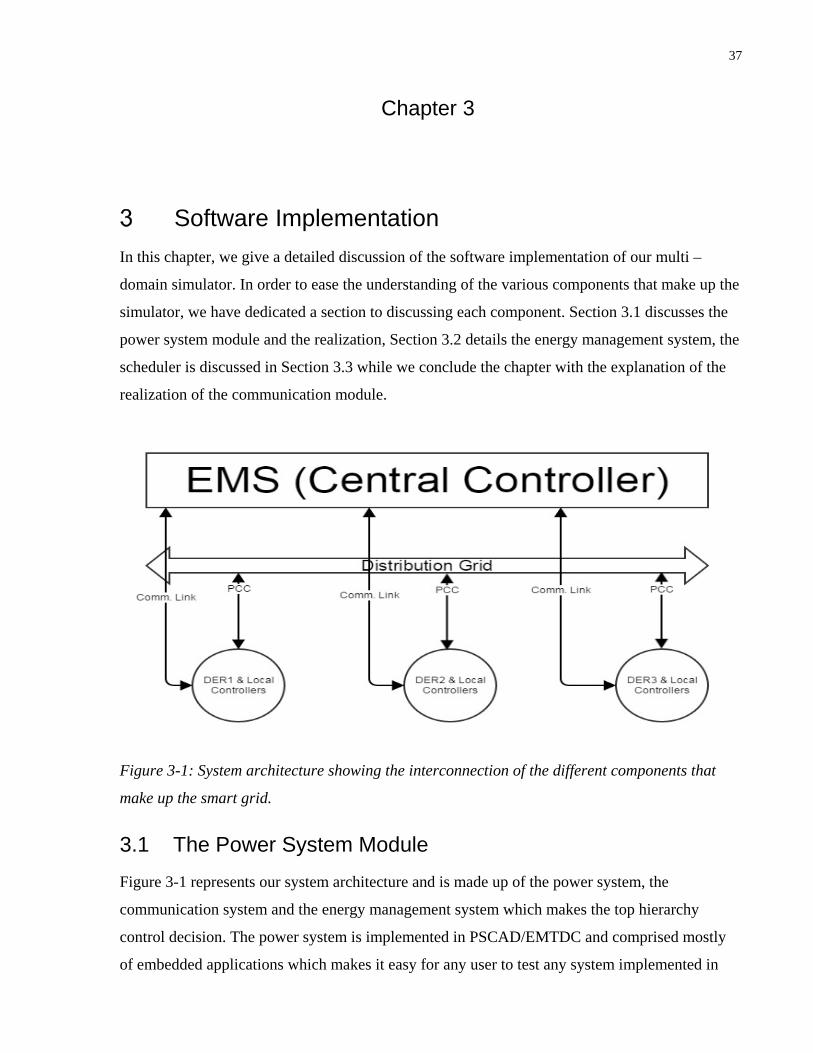
37
Chapter 3
Software Implementation In this chapter, we give a detailed discussion of the software implementation of our multi –
domain simulator. In order to ease the understanding of the various components that make up the
simulator, we have dedicated a section to discussing each component. Section 3.1 discusses the
power system module and the realization, Section 3.2 details the energy management system, the
scheduler is discussed in Section 3.3 while we conclude the chapter with the explanation of the
realization of the communication module.
Figure 3-1: System architecture showing the interconnection of the different components that
make up the smart grid.
3.1 The Power System Module Figure 3-1 represents our system architecture and is made up of the power system, the
communication system and the energy management system which makes the top hierarchy
control decision. The power system is implemented in PSCAD/EMTDC and comprised mostly
of embedded applications which makes it easy for any user to test any system implemented in

38
PSCAD/EMTDC in the co-simulator with minimal work. In Figure 3-1, DERs, the distribution
grid and the connecting lines make up the power system module. Below is the figure which
describes the software architecture of the whole system.
Figure 3-2: Software Architecture of the Co-simulator with all the key components
We implement a system that could function like a plug and play device. So the role of each block
is explained below.
3.1.1 Power System Design in PSCAD
As described in previous sections, PSCAD is the graphical user interface for the EMTDC
simulation engine and this is where each user of the co-simulator can design any conceived
power system. With our software, our idea is that each person that wants to use the co-simulator
can design his/her own power system in PSCAD and use it in our system for transient studies in
the time domain that involves co-simulation without doing much work in modifying our system.
Hence, the type and scale of what is obtainable in this platform is only a decision made by the

39
user of the system. The pre-programmed models in PSCAD as well as the user defined models
can be used in this section for designing the desired system. Also, PSCAD is rich with many
control and input functions which are used to adjust the parameters of the system as the
simulation is running. PSCAD became a natural choice for us because it can simulate short
transient disturbances with high fidelity, and that is our area of interest. Finally, the results can
be analyzed in the PSCAD using various plotting tools or could be exported to third party
software like excel for further analysis and processing.
3.1.2 EMTDC and C Interface
EMTDC is the simulation engine of the PSCAD software and one vital feature of the software
which we exploit in the development of the multi-domain simulator is the freedom to build a
custom model and embed it into the simulation engine. FORTRAN source code, C source or
object files can be incorporated into the simulation engine using a special Application
Programmable Interface (API) provided by Manitoba Hydro who are the licensed owners of the
software. Therefore, pre-programmed models which are not in the supplied library that ships
with the software can be built using any of the mentioned programming languages above. With
this extension capability, we designed an interface using the C programming language to enable
the EMTDC to import and export data from the scheduler. For internal interactions (between
PSCAD and EMTDC custom built models), we develop a C subroutine which eases interaction
between the custom built models and the pre-programmed models in PSCAD. For external
interactions (between PSCAD/EMTDC and scheduler), we employ inter-process communication
using windows sockets programmed using the C programming language. The choice of windows
socket is obvious as we wanted something that is protocol independent and faster. And the ability
of the socket communication to make use of underlying operating system communication
capabilities has been proven to speed up communication based on the socket networking
communication. This interface contains two essential parameters which ought to be manually
configured by the user of the software and below is a description of both;
• Dynamic Buffer: A key design parameter and determines the quantity of data that could
be transferred out of and into EMTDC. To make the software scalable, we settled for a
dynamic buffer so that the volume of data that could be exchanged between EMTDC and
the rest of the system is only constrained by the available hardware storage in the

40
computer systems used in the simulation. This could be likened to statistical multiplexing
technique and allows freeing of the communication buffers and bandwidth for other
forms of traffic when the smart grid traffic is small in size. As expected, this feature is
present for both inbound and outbound traffics on both the EMS and the power simulator.
All that is required to activate the dynamic buffer is the knowledge of the number of
sensors that will be taking measurements in the system. This value would have to be
supplied by the user in the configuration file manually. The pseudo code for both the
outbound and inbound traffic are provided below.
Figure 3-3: Pseudo code for the dynamic buffer managing traffic from different sources going
into the communication network.

41
Figure 3-4: Pseudo code of the dynamic buffer managing traffic reception from the
communication network.
• Sampling rate: For synchronized measurement sensors like PMUs, this rate would have
to be uniform, hence, only one value is supplied. But where the design requires different
rates for different sensors, the user would supply this value manually in the configuration
file provided. This is a very important consideration as the sampling window affects the
utilization of the data as enumerated in Table 2-2. For instance, in time critical
applications like transient analysis, there is a higher sampling frequency per second while
in other applications, it could be lower. In order to accommodate whatever application
that this software could be used for, we have given the user the liberty to configure this as
it suits the system under study.
42
3.2 Energy Management System (EMS) In Figure 3-1, the EMS is the central controller. Again, this feature is incorporated in view of
different control and management structures available in smart grid. Generally, there are two
kinds of control systems structure: centralized and distributed control systems.
• Centralized control system: When the action performed by lower level controllers are
dictated by the information obtained from the central controller, then this arrangement is
called a centralized control system. Here, the central controller can instruct the lower
level controllers directly or if the system is so complex, a kind of hierarchy could be
created in which there are other controllers in between the top level and lower level
controllers. The communication between the top and lower level could be bidirectional
(feedback) or unidirectional (open loop) as the case may be but the lower level controllers
will always depend on instructions from the central controller.
• Distributed control system: As the name suggests, when the lower level controllers
function based on local information only, then the system is said to be a distributed or a
decentralized system. The major difference here is that the lower level controllers make
their decisions without depending on the instructions of any commanding influence.
Therefore, we integrate the EMS into our work so that any study system that requires a
centralized or hierarchical control system could easily be studied without many changes to the
underlying software. The system can equally handle a system that has a purely decentralized
control system. In order to accommodate both behaviors without degrading the results of an
experiment, we give the user the option of enabling or disabling the EMS during the simulation
configuration. And to ensure versatility in the control functions, we use the MATLAB/Simulink
computational software as the control/management system simulator. The choice of this is an
easy one considering the different field of study in which the software readily has the toolbox.
So, all that is required of the user is to design the control system in MATLAB/Simulink and the
rest of the system will be interacting with it as the need arises via the MATLAB/Simulink API
which is available in numerous programming languages. This way, data is fed into the
control/management system in MATLAB/Simulink and it returns the result to the sending
software after processing.

43
However, if the control system is a decentralized one and does not require heavy computational
decisions, then the EMS can be disabled, and the control and logical functions and tools inside
the power simulator is then utilized to design the controllers.
3.3 Scheduler As the name suggests, this is not a simulator, but a software component that is responsible for
coordinating the behavior of the simulators involved in the multi-domain simulation. It creates
the discrete-event queue of all events generated from the different simulators and sorts them
according to their timestamp, and then alternates the run of each simulator based on the next
event in the queue. The details of how this software is realized is explained in the sub-sections
below and the Figure 3-5 is the flowchart diagram of the interactions between different modules
in the software. It is worth mentioning that the choice of the simulator where this program is
embedded determines which programming language is used to implement it. In our case, we
embed it in the PSCAD/EMTDC simulator and because it allows only C or FORTRAN files, we
implement it using the C programming language.
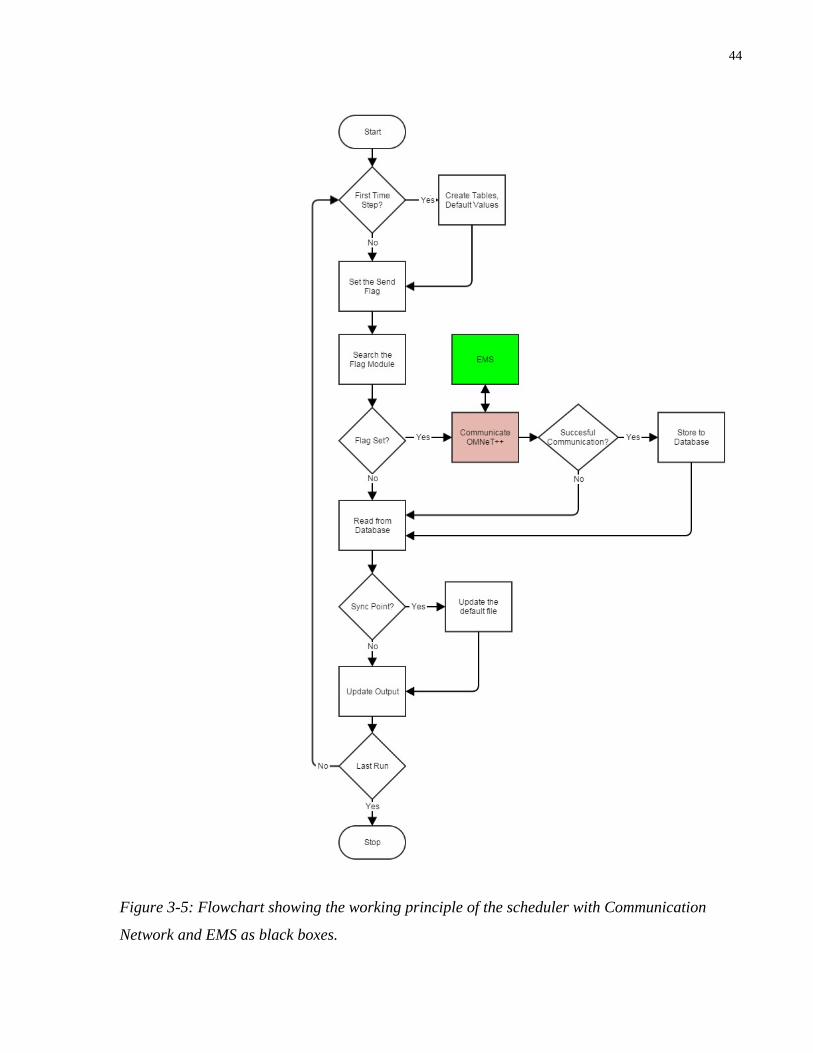
44
Figure 3-5: Flowchart showing the working principle of the scheduler with Communication
Network and EMS as black boxes.
45
3.3.1 Create Table Module ()
As shown in the flowchart, when the simulation starts, as part of the initialization process, the
scheduler checks to see if that is the first time-step of the simulation and if so, it creates the
database tables that will be storing the history for each of the physical sensor devices in the
power system. Checking whether it is the first time-step was necessary to ensure conflict free
table creation process and prevents the simulation from coming to a halt.
3.3.2 Create Default Status ()
After the successful creation of the tables, then the scheduler creates default values to be applied
to the physical devices in the power system and choosing what this value should be is a matter of
knowledge of the nature of the physical devices and their expected input values. The import of
this is to enable PSCAD/EMTDC progress with the simulation at the initial stage. This is as a
result of the simulator being a single threaded program and requires all declared variables to
have a value before the next step of the simulation is executed.
3.3.3 Rate Module ()
In order to take measurements from the physical devices in the power system and transfer them
to the control center via the communication channels, the scheduler incorporates a rate module
which is responsible for figuring out when values from each physical device should be sent to the
equivalent control center device for processing. If PMUs are used as the sensing device, then
there is a synchronized rate for the devices and the dynamic buffer manages how the data from
each device is arranged in the buffer and transmitted. If rather the rates are not the same and
there is no need for synchronization, then rate module, using the rates supplied by the user of the
software for each physical sensing device, decides when the measurements are taken.
3.3.4 Search Send Flag Module ()
When any physical device needs to communicate with the control center, it sets a flag. So, the
search send flag module is responsible for continuously scanning the send flag to see whether
any of the physical devices in the power system needs to communicate with the control center. If
no flag is set, the simulation proceeds. However, if a flag is set, then the scheduler queues it in
the event list and initiates the communication with OMNeT++ using the windows socket
communication, which in turn will hand over the simulation time to the communication and

46
control simulators. Because the simulators are single threaded simulators, this will automatically
pause PSCAD/EMTDC until the scheduler has a power event in the queue that it wants to
execute.
3.3.5 Socket Module ()
An essential component of the scheduler, it facilitates the data exchange amongst the three
simulators. We make this a socket client, which binds to the socket server in the communication
simulator and transfers data to and fro from the communication simulator when the need arises.
The choice of windows socket was primarily due to its efficiency, protocol independency, and
ability to network multiple computers running these simulators with ease. This function is
activated by the search send flag module if there is any physical device that has set a flag for
transmission. It should be emphasized that there is no delay between setting the flag and
transmitting the measurement because the events are sorted according to the timestamps of their
occurrence in the queue and executed accordingly.
3.3.6 Write Database Module ()
If the socket module was activated and the communication was successful, then the next thing the
scheduler does is to store the returned control values from OMNET++ in the database of the
system which is built using the small, light, open source database called SQLite. One of the
benefits of using the SQLite database is the ease of embedding it in any application because of
its small size. Also, it has API for most popular programming languages and we make use of the
C API of the database to store the timestamp and the returned control value in the database.
These saved values are used to create an event queue and are sorted for execution according to
their timestamp. The control values could represent reference set points from top level
controllers to lower level controllers or simple close or open command from the actuators to
circuit breakers.
3.3.7 Read Database Module ()
Because the event list is in the database, for every time-step during the simulation, the read
database module checks the database to find out if there is any physical device that needs its
status updated by passing an instruction in the queue to it. Which device status gets updated is
solely dependent on the time stamp which was used to sort the events. Hence, if multiple devices

47
share same time stamp, they all get updated at the same time. This process is cardinal in
eliminating accumulated errors which occur by explicitly fixing when the synchronization should
occur, which is otherwise called periodic synchronization.
3.3.8 Update Output Module ()
Like we stated earlier, the PSCAD/EMTDC simulator requires that every variable has a value
before it proceeds to the next step. Hence, after reading the database and checking for
synchronization point, the output status module is updated. And then the update output module
updates the status of the physical devices connected to the scheduler and the simulation
proceeds. Output status module is an intermediate module which ensures that if there is no
synchronization point, values in the previous history of the output status module are applied to
the devices, and this corresponds to a scenario in which the system dynamics is assumed not to
have changed over time. This is just to ensure that devices (represented as variables) always have
values during the simulation and prevents the simulation from coming to a premature halt.
3.4 The Communication System For the energy management system at the control center and the local controllers to
communicate, a communication link has to exist to link the systems together and it is the
incorporation of this feature that is shaping the development of smart grid. To this end, features
which hitherto are not obtainable in the traditional power system as a result of limitation of
hardware or lack of communication between different parts of the power system are now being
studied and integrated. With the inclusion of communication overlay in the power system, the
power system is more responsive and dynamic to consumer behavior. Also, it is now possible for
so many decentralized controllers of power plants to participate in maintaining grid frequency
and voltage via efficient coordination engineered by the use of communication network
infrastructure as against the old situation of using one large power plant to manage voltage
and/or frequency. To facilitate the understanding of how we realize our communication system
for the smart grid, we break it into the sub-sections below.

48
3.4.1 OMNeT++
From Figure 3-2, the top of the communication system software is the OMNeT++ framework.
This is a collection of reusable objected-oriented modules that can be assembled to do network
simulation. The modules are hierarchically designed and ranges from simple to compound
modules. Also, the OMNeT++ comes with eclipse-like Integrated Development Environment
(IDE) which allows for design, simulation and analysis of the study system conveniently using
the rich graphical interface. For those that like UNIX-like command line method, it also allows
simulation using the command line. It is built using the C++ programming language and it is an
open source software. On its own, OMNeT++ is not a simulator, it is a collection of C++ objects
which have been arranged as modules and these modules can be run on any system that has a
C++ compiler installed on it. The graphical interface has functions like run, stop, debug, etc., and
equally has some simple online plotting tools to analyze results. In our model, this is where the
mapping of the power system into its equivalent communication system is done. Mapped
modules represent the physical devices in the power system like fuse, switch, substation, etc.
Also, the distance between physical devices are represented using channels in the
communication system. And the channel connection of the physical devices could be wired using
fiber or coaxial cables or it could be wireless using Wireless Local Area Network (WLAN),
Metropolitan Area Network (MAN), etc. In order to mimic the behavior of communication
network, the modules exchange information in a discrete manner.
3.4.2 INET Framework
Being an open-source software, the community of developers that use the OMNeT++ software
have been using the modules found in OMNeT++ to deepen special areas of network and related
simulation, and one of the areas that has received great attention is the Internet Protocol (IP)
communication. The IP suite is the set of computer networking models used on the Internet. To
this end, the INET framework for OMNeT++ has been evolving over time and solely serve as an
underlying framework for IP suite communication in the OMNeT++ simulation of systems that
use the packet switching protocol. Packet switching transmission can be classified into
Transmission Control Protocol/IP (TCP/IP) and User Datagram Packet (UDP). Below is a
description of each:

49
3.4.2.1 TCP/IP
A type of packet switched protocol that uses acknowledgement to ensure a reliable byte stream
transfer. If there is packet drop or non-delivery, a lack of acknowledgement will signal a
retransmit of the packet unless the number of retries is exceeded, which will force the sender to
return a transmission failure message. This type of protocol is employed in applications which
emphasizes reliability. It has the characteristics of client-server communication with sender
representing client9 and server10 representing receiver. TCP/IP is a connection-oriented protocol
and uses a virtual circuit connection method. Therefore, the resource is secured when it is
required and released after it is used. The connection process is made up of three phases
described below and shown in Figure 3-7:
9 Client is the computer that sends a connection request. The client has to know the IP address of the server and the port number in order to send the request for connection. 10 Server is the computer device which bind to a port to create a passive open connection and wait for connection requests from clients. When the clients establishes the connection, it becomes an active open connection.
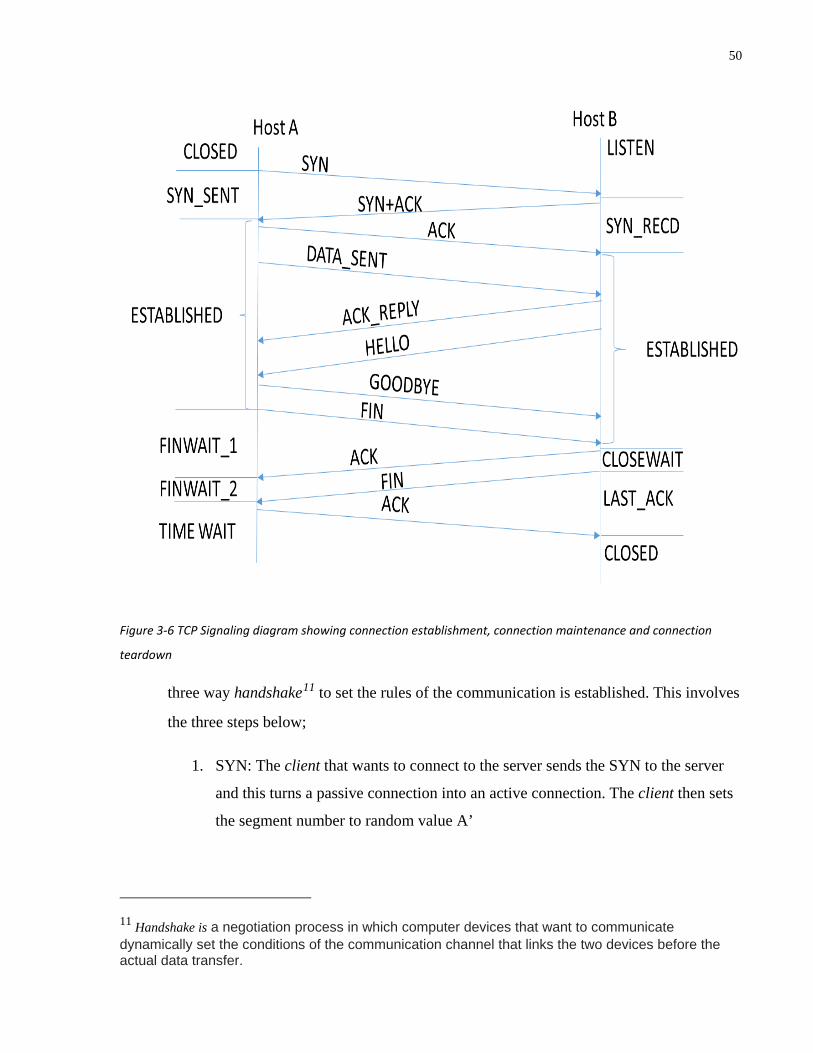
50
1. Connection establishment: In order to create a connection between a client and a server, a
three way handshake11 to set the rules of the communication is established. This involves
the three steps below;
1. SYN: The client that wants to connect to the server sends the SYN to the server
and this turns a passive connection into an active connection. The client then sets
the segment number to random value A’
11 Handshake is a negotiation process in which computer devices that want to communicate dynamically set the conditions of the communication channel that links the two devices before the actual data transfer.
Figure 3-6 TCP Signaling diagram showing connection establishment, connection maintenance and connection
teardown
51
2. SYN-ACK: In reply to the client request, the server sends the SYN-ACK message
with SYN number incremented by 1 (i.e. A+1) and another random value chosen
by the server to serve as the packet sequence number.
3. ACK: In the last lap, the client sends an ACK to the server with the
acknowledgement number retained as A+1 but the sequence number modified to
B+1. In this state the connection is established and the next phase begins.
2. Connection maintenance: After the step one above, a full duplex communication is
established using the sequence numbers and the two devices can start transmitting and
receiving data to and from each other.
3. Connection teardown: Similar to the connection establishment, this uses a four way
handshake and the steps are outlined below and are shown in Figure 3-7.
1. FIN: The device that wants to close the connection initiates the active close by
sending a FIN message.
2. ACK: The remote device replies to FIN by sending an ACK to the remote device.
This is the last ACK from this device.
3. FIN: The remote device again sends its own FIN message to the initiator of the
close request.
4. Finally, the initiator device replies with its own last ACK message and the
connection is terminated.
Sometimes, this four way process is reduced to three thereby merging the two reply
messages from the remote device into one.
3.4.2.2 UDP
UDP is similar to the TCP/IP but does not use acknowledgement nor involve securing the
transmission channel for the entire packet before transmission. Rather, packets are sent out
individually and each packet is free to take any route to the destination. This presents the
challenge of packets arriving out of order and considerable resource is used in the receiver to

52
discern the order of the packets. Worse still, lack of congestion control in this protocol results in
some packets encountering a high delay and some packets even lost in transmission. Packet re-
sequencing is done at the receiver to reconstruct the original message unlike TCP in which all the
packets use the reserved channel and are usually serially transmitted, and where TCP packets
arrive out of order, the sequence number makes it easy to re-order the packets. This type of
packet switching is mostly used for applications that are tolerant of small packet loss, but
requires very low latency, and a typical example is voice communication. Also, it is deployed in
real time streaming service involving large clients as in IP television.
In OMNeT++, INET has been used to develop tested modules for TCP/IP and UDP network
simulations. Therefore, users can easily use the INET framework to design any network of their
choice using the INET framework as an underlying network module in OMNeT++. It is this
resource that we utilize in our system to build the communication protocol of any smart grid
system under study. The choice of UDP or TCP/IP in the protocol design of any system study
depends on which of the features of packet loss or latency is to be compromised. However, in all
of our test systems, we use the TCP/IP protocol.
3.4.3 C++ Interface
Because the OMNeT++ simulation framework is developed using the C++ programming
language, the interface to the scheduler is developed using the C++ programming language for
ease of integration. Our OMNeT++/INET has two interfaces to the two external simulators that it
is connected to and they are discussed below.
1. OMNET++ to PSCAD/EMTDC Interface: In order to be able to receive and send data to
the PSCAD/EMTDC using the socket communication discussed in the previous sections,
we integrate a socket which serves as a server and allows the PSCAD/EMTDC Interface
socket to make a connection request to it as a client. This establishes a full duplex
communication between the two simulators. And to ensure scalability, we use a dynamic
buffer in both ways to make sure there is no data corruption owing to buffer overflow.
2. OMNeT++ to MATLAB Interface: In reality, the communication network is in-between
the power system and the power management system (i.e. Control center). Hence, to
convey data from a power system to the control center during simulation, we develop a

53
bidirectional data transfer interface between the communication simulator and the control
simulator (MATLAB). To make its integration easy in a variety of programming
languages, MATLAB has an API which is easily used. However, the OMNeT++ is not
compatible with this API, so we use a socket communication between the OMNeT++ and
Visual Studio running a C program from which we make use of the MATLAB API to
start the MATLAB simulation engine. Therefore, using this software involves only
developing the control system in MATLAB and configuring the appropriate number of
variables in the C program running inside the Visual Studio.
3.5 Summary In this chapter, a software realization of the distributed simulation system is presented with
emphasis on the system level block components. The PSCAD/EMTDC houses the details of the
power system as well as the scheduler, software that is responsible for creating the event queue
by using the system history, and also regulates the alternating runs of the simulators. The
communication system is realized using the OMNeT++/INET framework and uses the TCP/IP
protocol to ensure reliability of data exchange, while the MATLAB/Simulink computational
software handles all the power management decisions required in the system. Also, the ability of
the system to accommodate the study of both a centralized and decentralized system is discussed.
With the scheduling system and the database, our system eliminates the use of fixed time-step
synchronization. Hence, there is no accumulated error during synchronization as each device
status is updated according to the timestamps of their events. Simulations in Chapter four will
confirm the effects of the scheduler in eliminating accumulated errors. Also, we developed a
variable buffering system in case the sensors have flexible sampling rates, and this has made the
system scalable and versatile.
54
Chapter 4
Test Cases: Microgrid Control and Communication A microgrid is a group of distributed energy generation and energy storage units, serviced by one
or more feeder downstream to a substation, and is capable of operating in main grid connected
mode, islanded mode and provide a two-way transition between the two modes [32]. The energy
generation units could be solar, wind turbine, thermal power plants, etc. The energy storage units
may be comprised of battery, flywheel, etc. The main feature of microgrid is its ability to
respond rapidly to energy fluctuations in the grid. To achieve this, an efficient control
mechanism has to be in place to regulate the operation of the grid. And suffice me to say that for
a hierarchical control structure, this is difficult to achieve without communication infrastructure.
Hence, the discussion of this chapter is about the operation of microgrid controllers and the role
of communication infrastructure in its operation. To demonstrate the operation, a time-domain
simulation of the power system in PSCAD and discrete simulation of the communication system
in OMNeT++ are performed and analyzed.
4.1 Study System: Microgrid In order to test every aspect of our system, we have chosen a microgrid because of the following
reasons:
• It is realistic due to the declining cost of energy storage and the increasing affordability
of renewable energy.
• It comprises all the key components that make up the smart grid:
o Control system
o Communication network
o Power system
55
• The coupling between the key components identified above presents a good opportunity
of studying the cyber-physical dependence of the components of the smart grid.
• The timescale for the reaction of controllers is within the range (milliseconds) we are
interested in.
According to Reference [11], latency defines the difference between the occurrence of a state
and when it was acted upon by an application, and this comprises communication delays and
others. Hence, from Table 2-2, transient stability is one of the smart grid applications and we
intend to do off-line time-domain simulation using the microgrid of Figure 4-1 to verify the
ability of the controller to stabilize the system after transient disturbance in the using
communication system vis-à-vis the results of [5]. The microgrid is a distribution system with a
large number of buses, feeder branches, and electric loads, thereby providing a more realistic
scenario to study the performance of the communication system and controllers. The microgrid
has 0.6 KV dispatchable electronically-interfaced Distributed Energy Resources (DER) units and
eleven loads which are connected to a 13.8 KV distribution system. A 1.5 KV DC voltage
source, a two-level voltage-sourced converter (VSC) and a series resistor-inductor (RL)
represents each of the DERs, which is connected to the main distribution feeder via a 0.6 KV/
13.8 KV step-up transformer at its point of common coupling (PCC). Below is the system data in
Table 4-1. All the testing is done with the system disconnected from the main grid by opening
the circuit breaker CBg.

56
Table 4-1 Microgrid Data showing the ratings of the DERs, load and line impedance.
Base Power Sbase 1.6 MVA
Base Voltage Vbase 13.8 KV
Size of DER units DER1:1.6 MVA DER2:1.2 MVA DER3: 0.8 MVA
Load Data L1 (0.08-0.94) L2 (0.16-0.98) L3 (0.17-0.90) L4 (0.17-0.94) L5 (0.25-0.96)
Line Impedance (0.35 + j0.31) ῼ/km
Transformer
Reactance
8%
RL Filter Z= 15% Quality Factor = 50
DER2
L2
2kmDER1
L1 CB1
2km
L5 2km2km
L4L2
7km
L1
CBg
Grid
DER3
2km
L22km
L1
L3 4km
3km4km
L3
2km 3km
Figure 4-1 Complete diagram of the study microgrid identifying the loads, the DERs, and the main grid.

57
From Figure 3-1, the study system is comprised of the Power management system, the DERs
with their local controllers, the distribution grid and the communication system. In the following
sections, these components are discussed.
4.1.1 Power Management
The power management system is adapted from [5] where DER1 and DER3 are designated as
power-controlled DER (PC-DER) units (their reactive and real power outputs are regulated)
while DER2 is designated as voltage-controlled DER (VC-DER) unit. This means that DER2
controls the voltage of its PCC and invariably the voltage profile of the whole grid. The choice of
DER2 as a VC-DER is because of its location within the studied system. Depending on the
distribution feeder length, the load information and configuration of the microgrid system,
several DERs can be designated as VC-DER to improve the load profile of the grid, while others
remain PC-DER. Using the communication link in Figure 3-1, the microgrid real/reactive power
is continually monitored, measured and transmitted to the PMS in Figure 3-1 so as to determine
the set points that are appropriate for the PC-DERs. The PMS uses the measured data and an
optimization scheme which ensures that load is shared among the generators according to their
capacity to determine the set points of the PC-DERs units, Pref,i and Qref,i, where i = 1,3. The
voltage set point of DER2 is also specified by the PMS by forcing it to maintain the voltage of its
PCC at a specified level like 1 per unit (p.u) with zero degree angle. The implication of the DER2
maintaining the voltage of its PCC is the result of Equation 4.1 below.
3,1,2,
3,1,2,
DERDERLOSSLOADDER
DERDERLOSSLOADDER
QQQQQPPPPP−−+=
−−+= (4.1)
Where PLoad/QLoad represents the total real/reactive power demand of the microgrid net load and
PLoss/QLoss is the total real/reactive power loss of the distribution feeder. Hence, the PMS controls
the power flow of the microgrid. The frequency at which the PMS performs its function is
dependent on the type of system under study. For microgrid, the measurement and control
functions by the PMS should be done often in order to ensure that the established power sharing
scheme among the DERs units is maintained. This is vital in ensuring the system handles
disturbances such as load disconnection or reconnection properly.

58
4.1.2 Frequency Control and Synchronization
Open-loop control is adopted for regulating the frequency of the microgrid [33]. An oscillator is
built inside the local controllers (LC) of each DERi and it generates a 60 Hz sawtooth waveform
with the following pattern ( ) ,ooi dt θτωθ += ∫ where oo fΠ= 2ω and of is the nominal power
frequency of the microgrid.
Figure 4-2 Sawtooth Waveform used to regulate the output of the DERs.
Figure 4-2 shows the sawtooth waveform which is obtained from the oscillator of the local
controllers and is used for the abc(dq) to dq(abc) transformation of the mathematical model of
the DERi. Based on the proposed control strategy in [33], a globally synchronized signal is
communicated to all the DER units via a global positioning system (GPS) that is described in
[34]. The importance of synchronizing the signal to all the DER is to;
• Check drift among the local controllers,
• Make ready the incoming DER units
Also, crystal oscillators with a high degree of accuracy are used in the local controllers so as to
be able to accurately regulate the controllers in the event of unavailability of the synchronizing
signal (communication network failure).
4.1.3 Local Controllers
The system uses a hierarchical control structure in which the PMS delivers power set points to
the local controllers, and the local controllers track the set points. The set points are transmitted
via the communication system overlay. Therefore, the LC of each DERi performs its control

59
function by rejecting disturbances and tracking the specified value from PMS. To achieve this,
the LCi takes the measured value of the three-phase voltage from its corresponding PCC,
transforms it into a dq frame signal using the phase-angle signal iθ that is generated by its
internal oscillators and synchronized with the global time-reference signal received from the
GPS. The details of the abc/dq and dq/abc transformation can be found in [35] and the main
reason for the transformation is to decouple the state variables for ease of control. Also, the
received voltage magnitude and angle set points [ ] iirefV δ∠, , are transformed to the dq frame to
produce dq-based reference signals iirefirefd VV δcos,,, = and iirefirefq VV δsin,,, = . The LCi then
uses the measured and reference values received to determine the dq voltage components, i.e.,
itdV , and itqV , of the terminal of the Voltage-Source Converters (VSC) in each DERi. This dq
terminal voltage is then used to generate the terminal voltage HViabctv ,,, at the high voltage side of
the transformer. In order to obtain the low voltage side of the transformer LViabctv ,,, , HViabctv ,,, is
divided by the turns-ratio of the transformer and shifted if need be. This low voltage value
LViabctv ,,, is then fed to a pulse width modulated (PWM) signal generator of the interface VSC of
the DERi. According to [33], the controller is capable of accounting for the mismatch between
realistic and theoretical turns-ratio and phase shift of the transformer.
4.2 Communication Architecture Mapping the equivalent communication of the power system under study can range from being a
simple task to a fairly complex one. This is because of the array of options available in the
design of the communication system. As outlined in Chapter 3, several considerations like the
volume of traffic, the response time, the type of transport channel (TCP, UDP), the geographical
area of the power system under study, wired or wireless channel, etc., form cardinal points in
making decisions about the structure and components of the communication system. In our case,
however, it is a fairly simple decision because the number of measurement points (3) is small,
the geographical spread of the grid is also small, and we know that the system requires high
reliability, hence the choice of TCP instead of UDP.

60
Figure 4-3: Communication system equivalent of the microgrid showing the interconnection
amongst the key components of the system.
4.2.1 Geni LAN
Geni LAN is the combination of the local controllers and the sensing devices which repeatedly
take the PCC readings of each DER, and it’s located within the LAN of each generator. In our
case, the real and reactive power components at the PCCs are continuously sensed and
transmitted to the power management system via the fiber optic cable. Also, the voltage profile
of the grid is monitored by the sensors in Gen2 to ensure it remains within the specified operating
range. Therefore, Geni Host is both a traffic source and traffic sink as sensed data emanate from
it and control data from the EMS is utilized by the local controllers inside it.
4.2.2 Energy Management System
As the name suggests, this houses the central controller, which manages the set points for each of
the local controllers. In our case, this is an interface to the MATLAB software and consists of
sockets for sending the sensed values to MATLAB and receiving the control decisions for
downward transmission to the local controllers.

61
4.2.3 Communication Channel
In Figure 4-3, all the vital components are connected by communication links or channels. The
channel could be optical fiber, coaxial cables, wireless radio or a combination. The choice of the
communication channel is influenced by the geographical spread of the grid, the bandwidth, and
the speed of transmission deemed appropriate for the power system. In a microgrid, the dynamics
of the system changes quickly and ought to be supported by a very fast communication channel.
Hence, in our model, we have made the connection using a fiber link. The capacity of the
channel is determined based on the required transmitted data. For standard sensing devices, the
transmitted data is always greater that the sensed data because of overhead, hence we made
provision to accommodate such discrepancy as evidenced in the table below, which is a
summary of the transmitted data as well as the channel capacity.
Table 4-2: Packet Structure of transmitted data, channel capacity, channel types and their characteristics
Timestamp Source
Address
Destination
Address
Measurement Total
Bits 64 32 32 64 192 Bits
Channel
Capacity
100 Mbps
Channel type Fiber Ethernet Real-time
WiMAX
Non-Real-Time
WiMAX
Channel
Delay
3.3μs 4.8-5.3μs 30-75ms 100ms
As can be seen from Table 4-2, the transmitted data is far below the channel capacity as we
imagine that in reality, it is not likely to be a homogenous traffic. For simulation purposes, the
capacity is easily adjusted to match any desired study by making minor changes in the
configuration file. However, in our simulation, we tested for many varying values of channel
delay just in case Ethernet, WiMAX is considered for use instead of fiber.

62
4.3 Simulation Results In order to demonstrate the usability of the multi-domain simulator developed, we consider the
off-line time domain simulation of the microgrid in Figure 4-1 under three different conditions.
First, we run the simulation as obtainable in [36] in which there is no communication medium,
but we incorporate the automated power management system instead of manually updating the
set points as done in the paper. This is to ensure that we are validating the behavior of the co-
simulator against a credible alternative. Second, we run a simulation in which there is no
interaction between the communication system and power system, but fixed average values of
the communication delays are extracted and hard coded into the power simulator to simulate the
impact of communication delays on the power system. Finally, we run a full multi-domain
simulation in which there is interaction among the simulators as the simulation progresses and
we discuss the performance of the controller as well as the observed similarities and differences
in the three scenarios. In all of the simulations, we start the simulation with the system loaded as
labeled in Figure 4-1. At 0.8s of the simulation time in PSCAD, the CB1 is disconnected and we
monitor how the controllers react to maintain the set objectives. When the system has settled, we
reconnect the load at 1.5s of the simulation time in PSCAD and we observe the system dynamics
again.
4.3.1 Performance metrics
At the beginning of this report, we identified different challenges that make co-simulation
difficult to include:
• Synchronizing the events from the two simulators to ensure that accumulated delays are
reduced or eliminated.
• Using effective and secure data exchange mechanism between the simulators.
• Scalability of the system developed
• And the ease of use of the co-simulator
63
In the simulation results that follow, we will measure the performance of the co-simulator in
solving the synchronization problem, discuss the scalability of the simulator and how user
friendly it is.
4.3.2 Single-domain simulation
Most studies of the microgrid typically focus their attention on investigating specific operational
aspects of the system like the control system, communication system, etc., while assuming
perfect conditions for the other areas of operation. As observed already, [36] developed a control
strategy for the microgrid and ran the off-line time-domain simulation as well as the real-time
simulation to validate the performance of the controller. The aim of the controller includes
regulating the power profile of the grid, regulating the grid voltage and sharing power output
among the generators according to their individual capacity. It equally recommended that
communication between the local controllers and the central power management system should
be done often to capture fast changing dynamics in the grid. However, the set point was
manually updated only twice during the course of the simulation. And the controller performed
as expected. So in our model, we have automated the power management system and enable it to
supply the set points more often as can be obtained realistically and see the impact of sampling
rate on the controller. It should however be noted that this work is not about optimizing the
controller designed in [33]. Rather, this model of the simulation will enable us to observe and
compare two things;
• The impact of sampling rate on the performance of the controller vis-à-vis the original
simulation done in [36]
• And also compare the effect of the communication delay as discussed in Sections 4.4.3
and 4.4.4.
4.3.3 Fixed-delay Single-domain simulation
We recognize that some study hard code the feature of the communication system into the power
system. This is usually done by extracting the average values of the communication parameter
and programming them into the behavior of the power system. So, in the second scenario of the
simulation, we independently run the communication system equivalent of our power system and
extract the average values of the communication delay and hard code them into the PSCAD

64
setup of the power system and repeat the simulation. The major difference between this and
Section 4.4.2 is the fixed communication delay which is absent in the latter.
4.3.4 Multi-domain simulation
In this section, we simulate the full system interaction between all the simulators used in the
design. This enables changes in any of the system to affect the behavior of other systems during
the simulation run. This scenario resembles Section 4.4.3 save for the fact that none of the
communication parameters are fixed. They are rather obtained as a response from the
communication system during the simulation.
4.4 Impact evaluation Having briefly discussed the simulation setup in Section 4.4, we discuss the results and make
deductions from the results.
4.4.1 Effect of sampling rate on controller
Reference [5] designed microgrid control and mentioned that the updating of the setup points
should be performed frequently, but it is silent on how often this should be done. So, we run a
series of simulation using the three scenarios discussed in Section 4.4 to determine at which rate
the controllers could be able to achieve the sharing scheme defined by the central controller that
provide the set points and equally maintain the power and voltage profile of the grid. In this
scheme, the EMS aims to ensure that DER’s power output is proportional to their capacity while
the local controllers aim to regulate the power and voltage profile of the grid. The knowledge of
this rate and the requirements of the system under study enables the designer to fine tune the
controller until the design aim is achieved. To demonstrate this, we run the islanded microgrid
and at 0.8s simulation time in the power simulator, we disconnect the CB1 shown in Figure 4-1
and we monitor the ability of the system local controllers in coordination with the EMS to
stabilize the system by reassigning the power output of the DERs and tracking the set points.
Also, at 1.5s simulation time in the power simulator, we reconnect the load and again monitor
the performance. The DER1 and DER3 regulate the power profile while DER2 regulates the
voltage profile of the grid. Below are snapshots from the simulation.

65
Figure 4-4 represents the real and reactive power components of the three generators for 1ms,
10ms and 25ms sampling rates. From the graph, it can be observed that as the sampling rate
decreased, the maximum deviation of the real and reactive power components of the power
controlled DER’s reduced. Generator three (Figure 4-4 c) has real power peak of 0.3 p.u. during
the load reconnection, and generator one dynamics was within the 1.0 p.u. throughout the
reconnection dynamics. However, a look at the generators for the 1ms (Figure 4-4 a) and 10ms
(Figure 4-4 b) shows that during the load reconnection, the spike of generator one real power is
above the rated 1 p.u. while generator three real power is equally higher than that of the 25ms
sampling rate. This demonstrates the effect of sampling rate on a controller action for this
scenario. The overall relevance is discussed at the end of the co-simulation example.
Figure 4-4: Single domain simulation showing the response of the DGs to transient instability
(load shedding)

66
Figure 4-5:Non-interactive simulation showing the response of the DGs to transient instability
(load shedding)
As with Figure 4-4, we have shown the results of increasing the sampling rates and it could be
seen that the Figures 4-4 and 4-5 are similar in behavior. This can be explained by the
geographical spread of the microgrid and the method of extracting the delay values. The
microgrid is usually a couple of kilometers in radius. Hence, the delay values are not expected to
be high, especially with no background traffic. However, while the Figure 4-5c behavior is
similar to Figure 4-4c which has reduced peak values for the power-controlled DER’s during the
load reconnection, the effect of the delay became apparent as the sampling rate reduced. From
Figure 4-5a to Figure 4-5c, it is obvious that the settling time increased as compared to Figure 4-
4. This is obviously as a result of the impact of the delay which affects the updating of the set
points. Hence, we could see that in Figure 4-5c that the reconnection dynamics settled after 1.8s
of the simulation time, which is farther than its counterpart in Figure 4-4c.

67
Figure 4-6: Full co-simulation showing the response of the DGs to transient instability (load
shedding)
In Figure 4-6, the results are similar to that of Figure 4-5 as the effect of the co-simulation delay
is manifest. However, as the sampling rate is reduced as evidenced in Figure 4-6c, the dynamics
of the power-controlled DER’s seemed smoother as in Figure 4-5c but the dynamics settled
faster than that of Figure 4-5c. As seen in the graph, the dynamics of all the generators settled
before 1.8s after load reconnection at 1.5s.
Also, we investigated the behavior of the controller using different communication network
protocols like WiMAX. To set this up, we fixed the sampling rate at 5ms and used the range of
the channel delay for real and non-real time communication via wireless channels like WiMAX
to simulate and see the effects of using such channels in delivering the set points as well as the
system state values to the energy management system. Below is the graph of this simulation for
30ms-75ms channel delay, which represents the real time communication on the wireless
channels.

68
Figure 4-7 is similar to both Figures 4-6 and 4-5 as the behavior is almost same in terms of the
generator dynamics during load disconnection and reconnection. Also, the settling time of the
dynamics is similar. Therefore, we argue that the effect of increasing the maximum channel
delay has minimal effect in this case because the transmitted bits is far smaller than the channel
capacity, there is no background traffic in the system and there are no intermediate processing
nodes as the system uses point-to-point communication. However, we are not ignorant of the fact
Figure 4-7: Real time simulation of the wireless channel and the power components of the DERs

69
that this simulation environment has made a simple assumption of no background traffic, but we
hope to incorporate this in future work.
Finally, we simulate the behavior of the system for other high latency applications in smart grid
and observe the behavior. We use 100ms maximum channel delay as that is the average delay for
wireless non-real time applications. Below is the graph.
As with Figure 4-5 and Figure 4-6, Figure 4-8 exhibited similar behavior because of the same
reasons we have adduced above.
4.4.2 Discussion of results
We discuss the performance of the co-simulator using the set objectives of Section 4.3.1.
Figure 4-8: Non-real time wireless channel simulation and the reaction of the DERs to load connection and
disconnection
70
4.4.2.1 Elimination of synchronization delay
A direct comparison between Section 4.4.2 and Section 4.4.4 immediately reveals the effects of
the co-simulator. The single domain simulation behaves like a time-stepped synchronization in
which there is a fixed time-step when the status of the IEDs’ in the power system are updated as
can be seen from Figure 4-4. Under this condition, the status of the generators are updated at
same time. However, in Figure 4-6, we succeeded in creating queued events made up of a mix of
the power and communication events using the scheduler. Hence, events are served according to
their time stamps and this is seen in the graph as each of the generators are updated according to
the timestamp of its event.
This technique ensures that no event waits for a fixed time-step but rather dynamically updates
its’ IED as at and when due. There is however a small error based on the fact that the timestamps
may not be equal to the PSCAD simulation time during synchronization. The source of this error
can be seen from the data structure below which is utilized for the synchronization;

71
Figure 4-9: Pseudocode showing the data structure used by the scheduler during
synchronization
The use of the open-source embedded database called SQLite facilitated this approach as it
helped us to have a temporary history of events from which the scheduler makes the decision of
which system or IED to execute its event. This error is however very small as the PSCAD time-
step is usually very small. Also, care is taken in choosing the time-step of the simulation to
ensure that two successive events in a particular IED does not fall in same synchronization
window. We used the knowledge of the round trip time (RTT) of the ping signal in the
equivalent communication network of the power grid to determine the accurate time-step. A
closer look at the graphs of Figure 4-4 to Figure 4-6 reveals two interesting scenarios discussed
below:
1. That sampling rate has effect on the behavior of the controller. In all, Figure 4-4c, Figure
4-5c, and Figure 4-6c have a more graceful reaction to the dynamics especially during the
transients experienced during load reconnection. The progressive reduction of the
sampling rates could represent a delay in delivery of information in the communication

72
channels or simply trying to determine the average set points per second which the
controller can track successfully. The delay in delivery of information can be attributed to
a node or communication failure in the communication network or a cyber-attack in the
communication network. So the system can be used to determine the limit at which the
controller can track the set points under different scenarios.
2. Also, the effect of the co-simulation is manifest in Figure 4-5c, Figure 4-6c as against
Figure 4-4c. It is evident that the delay experienced using the communication channel
does not portend a negative effect all the time as the updating of the generator controllers
according to their respective timestamps helped to allow for graceful reaction of the
system to the transient and reduced the peak of the spike experienced by the two power
controlled DERs. This delay arises in the communication channel because the generators
are not same distance apart, and contention for service in the EMS also introduces delay.
This spread in reaction of the generators to transient means that proximity of the
generators to the EMS has to be influenced by the capacity of the generators, and priority
routing at the EMS can also be employed to ensure that high capacity generators
experience less delay than the low capacity ones to avoid tripping or damaging of
generators during transient.
We limited the rate to 25ms because of the characteristics of the microgrid which requires fast
control operation. For other kinds of systems in the smart grid, the rate could be extended to
represent heavy traffic in the communication channel which could increase the delivery time of
information via the channel.
4.4.2.2 Reliable data exchange
Due to the high reliability required in the control and management of the microgrid, we used the
TCP/IP protocol as the protocol for the communication of information between devices in the
system. Although this tends to have higher latency than UDP, the reliability gained is worth it
because this is a time-critical application.
4.4.2.3 Scalability of the system
From the design point of view, our system is scalable. The only seen limitation to scalability is
the amount of sensor information which the buffer can handle at a time. But we used a dynamic

73
buffer to ensure that only system resources can limit the amount of information that can be sent
at same time. Hence, the only configuration information that is supplied in this regard is an
estimate of the number of sensors in the system, and the user can just supply a high value if this
system is developed by another person.
4.4.2.4 Ease of use
Our system is very easy to use and requires minimal interaction with the user. This simplification
is done to ensure that users see the system as a black box, and can effectively test their system on
the test bed with minimum information about the details of the co-simulator. However, the user
will have to supply the sampling rate as an array as well as a value greater than or equal to the
number of sensors in the system under consideration. For systems that use synchronized rates
like PMUs, only one of the rates is supplied and the system will populate the array accordingly.
It should be mentioned that while the power system interaction is as generic as possible, the
default communication mapping of the power system uses point-to-point communication and this
can be modified easily if the user deems it fit as the OMNeT++ modules already developed are
reusable components and can be used to effectively achieve the desired topology with minimal
difficulty.
4.5 Summary We focused on the controller behavior of the microgrid in this chapter using sensor sampling rate
and round trip time to study the behavior of the controller. And we demonstrated the impact of
doing full co-simulation as against the single domain simulation by showing and discussing the
effect of the communication network delay. Also, we showed different tests that can be done
using the co-simulation platform. Finally, the effect of ignoring the impact of the communication
network by doing only single domain simulation was discussed.
However, there is a limitation with our test bed which we believe gives room for improvement.
And that is the fact that most communication network engineers are not power system engineers.
Hence, knowledge of the two systems is required if one needs to map any power system under
study to its communication system equivalent and use the co-simulator as a test bed. Therefore,
developing an automated system that can map any given power system to its communication
74
network equivalent is one way of making the communication system more flexible as point-to-
point transmission may not be ideal for all scenarios.
Another obvious challenge is the geographical spread of microgrid which is small. Hence, the
difference in delay values are not that appreciable. But because our system can handle analysis of
power systems with the generators several kilometers away, we speculate that the co-simulation
effects will be more pronounced under such condition, and this will be captured in future works
in this area.
Despite the limitations above, our system showed consistency in its behavior and we believe it
can serve its’ purpose as co-simulator for power, control and communication networks.

75
Chapter 5
Conclusion
5.1 Summary and Conclusions This dissertation proposes a software-based co-simulator for smart grid systems. And the system
is comprised of:
1. A power system simulator called PSCAD/EMTDC which is utilized in designing the
power system component of the smart grid. It is also responsible for some logic control
action in the power system as it has IEDs.
2. A communication system simulator called OMNeT++ which is used to design the
equivalent topology of the power system in the communication domain for effective
communication between devices in the smart grid.
3. A high level computational software called MATLAB which is used by the PMS of the
smart grid to regulate the local controllers when hierarchical control scheme is employed
in the design.
4. A scheduling system which schedules the events generated by the power and
communication systems according to their timestamps and utilizes the SQLite database
for keeping history of the system events.
The elimination of accumulated delays resulting from synchronization of the simulators is
discussed. The design of the scheduler, which is used to eliminate the synchronization delays,
using C/C++ is explained. The scheduler has two interfaces:
1. The C interface which the scheduler uses to communicate with the PSCAD/EMTDC.
2. The C++ interface which the scheduler uses to interface to the OMNeT++.

76
The development of these interfaces is also discussed. To increase the scalability of the system,
we developed a dynamic buffer to ensure that the scale of system is only limited by hardware.
5.2 Challenges and Limitations In the course of the dissertation, we had some challenges both in design decisions and
functionality. Some of them are discussed below.
1. Our major challenge is the inclusion of background traffic in the communication protocol
developed in OMNeT++. This is because INET modules used to carry traffic has not yet
evolved to carry actual traffic. Rather, it uses a simple messaging system. Therefore,
analysis like congestions in the link, packet drop ratio were not tested at this time.
2. Also, we are concerned that mapping the power system requires considerable knowledge
of programming of the OMNeT++/INET modules by the user. For instance, the number
and position of IEDs in the power system must be captured in communication network
correctly and this requires some modifications in the existing communication network as
our default number of IEDs in the communication system is six. However, if the user has
IEDs less than or equal to six, and is comfortable using the point-to-point topology, then
all that is required of the user is modifying the distance between the IEDs according to
the power system topology.
3. Another obvious challenge is in choosing the time-step of the PSCAD to ensure that the
synchronization algorithm does not have successive IED events in same window. We are
able to overcome this by reducing the time-step to a small value using the RTT delay
value we got for the non-interactive simulation as a guide. So, our concern here is that the
user has to be aware of this and may need to get the average value of the RTT before
fixing the time-step of PSCAD and this again requires some experience using the
communication simulator.

77
5.3 Contributions The salient contributions of this thesis are as follows:
• It proposes and develops a co-simulator for smart grid system and it is made up of power
management system, communication system, and power system.
• It proposes a scheduling system that solves the synchronization delays which occurs
when fixed-time-step synchronization technique is used.
• It also uses the concept of dynamic buffer to ensure that a user of the system does not
have to modify the co-simulator to suit the system under test. Hence, results in a scalable
platform that is limited only by hardware.
• The system is used to demonstrate the effect of delay and sampling rate on a microgrid.
These features along with the secure data exchange between components make our system ease
to use, and scalable as demonstrated in Chapter four where the off-line simulations are carried
out.
5.4 Future Research Directions Our future work in this direction includes:
1. Incorporating background traffic in the communication channel to enable us do more
analysis. This may involve replacing the OMNeT++ communication network with a
commercial communication network simulator that carries actual traffic like OPNET.
This is necessary for us to study the effects of network congestion, link/node failures,
priority routing, cyber-attacks, etc. on the power system components and generators.
2. We also intend to move from off-line time domain simulation to real-time time domain
simulation. And with the capability of OPNET in this regard, coupled with a new real-
time power simulator we acquired recently, we believe this is realistic.
3. We intend to use software defined networks in the communication system to abate the
effect of cyber-attacks in smart grid.

78
References
[1] D. Karlsson, M. Hemmingsson and S. Lindahl, "Wide area system monitoring and control,"
Power and Energy Magazine, IEEE, vol. 2, pp. 68-76, 2004.
[2] M. Chenine, J. Ullberg, L. Nordstrom, Y. Wu and G. N. Ericsson, "A Framework for Wide-
Area Monitoring and Control Systems Interoperability and Cybersecurity Analysis," IEEE
Trans. Power Delivery, vol. 29, pp. 633-641, 2014 APRIL, 2014.
[3] J. Richards, Cyber-War: The Anatomy of the Global Security Threat. Gordonsville:
Macmillan [Distributor], .
[4] Mingkui Wei and Wenye Wang, "Greenbench: A benchmark for observing power grid
vulnerability under data-centric threats," in INFOCOM, 2014 Proceedings IEEE, 2014, pp.
2625-2633.
[5] A. H. Etemadi, E. J. Davison and R. Iravani, "A Generalized Decentralized Robust Control of
Islanded Microgrids," Power Systems, IEEE Transactions On, vol. 29, pp. 3102-3113, 2014.
[6] W. Li, A. Monti, M. Luo and R. A. Dougal, "VPNET: A co-simulation framework for
analyzing communication channel effects on power systems," in Electric Ship Technologies
Symposium (ESTS), 2011 IEEE, 2011, pp. 143-149.
[7] Hua Lin , S. S. Veda, S. S. Shukla, L. Mili and J. Thorp, "GECO: Global Event-Driven Co-
Simulation Framework for Interconnected Power System and Communication Network," IEEE
Trans. Smart Grid, vol. 3, pp. 1444-1456, 2012 SEPT., 2012.
[8] A. Hahn, A. Ashok, S. Sridhar and M. Govindarasu, "Cyber-Physical Security Testbeds:
Architecture, Application, and Evaluation for Smart Grid," Smart Grid, IEEE Transactions On,
vol. 4, pp. 847-855, 2013.
[9] K. Hopkinson, Xiaoru Wang, R. Giovanini, J. Thorp, K. Birman and D. Coury, "EPOCHS: a
platform for agent-based electric power and communication simulation built from commercial
off-the-shelf components," Power Systems, IEEE Transactions On, vol. 21, pp. 548-558, 2006.

79
[10] M. D. Ilic, "From Hierarchical to Open Access Electric Power Systems," Proceedings of the
IEEE, vol. 95, pp. 1060-1084, 2007.
[11] P. Kansal and A. Bose, "Bandwidth and latency requirements for smart transmission grid
applications," 2013 IEEE Power & Energy Society General Meeting, pp. 1-1, 2013 JULY, 2013.
[12] L. L. Lai, Chong Shum, Linyu Wang, W. H. Lau, N. Tse, H. Chung, K. F. Tsang and
Fangyan Xu, "Design a co-simulation platform for power system and communication network,"
in Systems, Man and Cybernetics (SMC), 2014 IEEE International Conference On, 2014, pp.
3036-3041.
[13] M. Levesque, Da Qian Xu, G. Joos and M. Maier, "Co-simulation of PEV coordination
schemes over a FiWi smart grid communications infrastructure," in IECON 2012 - 38th Annual
Conference on IEEE Industrial Electronics Society, 2012, pp. 2901-2906.
[14] V. Liberatore and A. Al-Hammouri, "Smart grid communication and co-simulation," in
Energytech, 2011 IEEE, 2011, pp. 1-5.
[15] N. Moskalenko, Z. A. Styczynski, T. Sokolnikova and N. Voropai, "Smart grid — german
and russian perspectives in comparison," in Modern Electric Power Systems (MEPS), 2010
Proceedings of the International Symposium, 2010, pp. 1-7.
[16] J. Nutaro, P. T. Kuruganti, L. Miller, S. Mullen and M. Shankar, "Integrated hybrid-
simulation of electric power and communications systems," in Power Engineering Society
General Meeting, 2007. IEEE, 2007, pp. 1-8.
[17] C. Molitor, S. Gross, J. Zeitz and A. Monti, "MESCOS—A Multienergy System
Cosimulator for City District Energy Systems," IEEE Trans. Ind. Inf., vol. 10, pp. 2247-2256,
2014 NOV., 2014.
[18] Zhang Haiyang and Li ShanDe, "Research on microgrid," in Advanced Power System
Automation and Protection (APAP), 2011 International Conference On, 2011, pp. 595-598.
[19] Rukun Mao, Huijuan Li, Yan Xu and Husheng Li, "Wireless communication for controlling
microgrids: Co-simulation and performance evaluation," in Power and Energy Society General
Meeting (PES), 2013 IEEE, 2013, pp. 1-5.

80
[20] Kun Zhu, M. Chenine and L. Nordstrom, "ICT Architecture Impact on Wide Area
Monitoring and Control Systems' Reliability," Power Delivery, IEEE Transactions On, vol. 26,
pp. 2801-2808, 2011.
[21] Xiaoyang Tong, "The co-simulation extending for wide-area communication networks in
power system," in Power and Energy Engineering Conference (APPEEC), 2010 Asia-Pacific,
2010, pp. 1-4.
[22] D. Kundur, Xianyong Feng, Shan Liu, T. Zourntos and K. L. Butler-Purry, "Towards a
framework for cyber attack impact analysis of the electric smart grid," in Smart Grid
Communications (SmartGridComm), 2010 First IEEE International Conference On, 2010, pp.
244-249.
[23] A. AlMajali, A. Viswanathan and C. Neuman, "Analyzing resiliency of the smart grid
communication architectures under cyber attack." in CSET, 2012, .
[24] P. M. Menghal and A. J. Laxmi, "Real time simulation: A novel approach in engineering
education," in Electronics Computer Technology (ICECT), 2011 3rd International Conference
On, 2011, pp. 215-219.
[25] I. Herrera, Mathematical Modeling in Science and Engineering: An Axiomatic Approach.
Hoboken, N.J.: John Wiley, 2012.
[26] Q. Chen and V. Hans, "A new procedure for structural modeling of linear and non-linear
systems," European Journal of Mechanics - A/Solids, vol. 17, pp. 139-151, 1998.
[27] P. H. Sørensen, E. Hendricks and O. Jannerup, Linear Systems Control. Springer Berlin
Heidelberg, 2008.
[28] Anonymous Principles of Modeling and Simulation. Wiley, 2009.
[29] C. M. Davis, J. E. Tate, H. Okhravi, C. Grier, T. J. Overbye and D. Nicol, "SCADA cyber
security testbed development," in Power Symposium, 2006. NAPS 2006. 38th North American,
2006, pp. 483-488.

81
[30] M. Mallouhi, Y. Al-Nashif, D. Cox and T. Chadaga, "A testbed for analyzing security of
SCADA control systems (TASSCS)," in ISGT 2011, 2011, pp. 1-7.
[31] Yuan Hong and Gu Ping-ping, "Application of windows inter-process communication in
software system integration," in Intelligent System Design and Engineering Application
(ISDEA), 2010 International Conference On, 2010, pp. 375-378.
[32] Yi Luo, Longjun Wang, Gelan Zhu and Gang Wang, "Network analysis and algorithm of
microgrid reliability assessment," in Power and Energy Engineering Conference (APPEEC),
2010 Asia-Pacific, 2010, pp. 1-4.
[33] A. H. Etemadi, E. J. Davison and R. Iravani, "A Decentralized Robust Control Strategy for
Multi-DER Microgrids—Part I: Fundamental Concepts," Power Delivery, IEEE Transactions
On, vol. 27, pp. 1843-1853, 2012.
[34] Anonymous "IEEE Standard for Synchrophasors for Power Systems," IEEE Std C37. 118-
2005 (Revision of IEEE Std 1344-1995), pp. 0_1-57, 2006.
[35] A. Yazdani, Voltage-Sourced Converters in Power Systems : Modeling, Control, and
Applications. Hoboken, N.J.: Wiley, 2010.
[36] A. H. Etemadi, E. J. Davison and R. Iravani, "A Decentralized Robust Control Strategy for
Multi-DER Microgrids—Part II: Performance Evaluation," Power Delivery, IEEE Transactions
On, vol. 27, pp. 1854-1861, 2012.















![[MS-DISO]: Domain Interactions System Overview · 2016. 10. 17. · [MS-DISO] — v20140502 Domain Interactions System Overview Copyright © 2014 Microsoft Corporation. Release: Thursday,](https://static.fdocuments.us/doc/165x107/6127aade45cf8b74194728bf/ms-diso-domain-interactions-system-overview-2016-10-17-ms-diso-a-v20140502.jpg)


