A Microscopic Human-Inspired Adaptive Cruise Control for ...€¦ · A Microscopic Human-Inspired...
24
A M HI A C C ED ECC 2020, S P, R M. M , A. I, E. D S, M. D. D B, G. P Department of Information Engineering, Computer Science and Mathematics (DISIM), Center of Excellence DEWS, University of L’Aquila, L’Aquila, Italy M 1215, 2020
Transcript of A Microscopic Human-Inspired Adaptive Cruise Control for ...€¦ · A Microscopic Human-Inspired...

A Microscopic Human-Inspired
Adaptive Cruise Control for Eco-Driving
ECC 2020, Saint Petersburg, Russia
M. Mirabilio, A. Iovine, E. De Santis,M. D. Di Benedetto, G. PolaDepartment of Information Engineering,Computer Science and Mathematics (DISIM),Center of Excellence DEWS,University of L’Aquila, L’Aquila, Italy
May 12-15, 2020

Presentation Outline
1 Introduction
2 Model
3 Controller Design
4 Simulations
5 Conclusions
1 22

Traffic Control Problem
In the last decades the number of vehicles hasconstantly increased and that number is expectedto raise even more in the next years.
More vehicles on the roads means more timewasted in traic congestion, less safety and higherpollution.
Vehicles adopting dierent level of automation canreduce considerably traic issues.
F. Borrelli et al., "Control of connected and automated vehicles: State of the art and future challenges." Annual Reviews inControl, 2018.
2 22

Why Human-Inspired?
Objective: let the ACC mimic the human behavior
Incorporate the human psycho-physical responsein a car-following situation
Improve the controller response to the surroundingenvironment
Improve passengers feelings
3 22

Presentation Outline
1 Introduction
2 Model
3 Controller Design
4 Simulations
5 Conclusions
4 22

Reference Framework
We consider N vehicles, indexed by n ∈ 1, ..., N, with same length L and proceeding on a straightroad.
CollisionA collision is the event corresponding to a distance between two vehicles less than s = L+ L0, whereL0 ≥ 0 is an additional safety margin.
5 22

Dynamic Model
Given the sampling time τ , kτ denotes the k−th sampling time. Let pn(k), vn(k) and an(k) be theposition, velocity and acceleration of vehicle n, respectively. The state vector of the follower vehicle isdefined as
xn+1(k) =
xn+11 (k)xn+12 (k)xn+13 (k)xn+14 (k)
=
pn(k)− pn+1(k)vn(k)− vn+1(k)
an+1(k)vn(k)
(1)
We define the set of feasible states as:
X = x ∈ R4 : x1 ≥ s, |x2| ≤ vmax, |x3| ≤ amax, 0 ≤ x4 ≤ vmax, vmax, amax > 0 (2)
6 22

Dynamic Model
The discrete-time evolution of the continuous state is described by
x(k + 1) =
1 τ 0 00 1 −τ 00 0 1 00 0 0 1
︸ ︷︷ ︸
A
x(k) +
00τ0
︸ ︷︷ ︸
Bu
u(k) +
0τ0τ
︸ ︷︷ ︸
Bd
d(k) +
0τ00
︸ ︷︷ ︸
E
e(x(k)) (3)
Where:
u is the control input: acceleration variation, or jerk;
d = an is the acceleration of the ahead vehicle;
e(x(k)) = c1 + c2(x4(k)− x2(k))2, c1, c2 > 0, is the friction term.
7 22

Microscopic Hybrid Automaton
Given a pair (n, n+ 1) of vehicles, the hybrid automaton describing the follower is:
H = (Q,R4, U,D, f, Init,Dom, E) (4)
Legend
Q = qj , j = 1, 2, 3, 4 is the set of discrete states;
R4 is the continuous state space;
U = [−umax, umax] is the input space;
D = [−amax, amax] is the disturbance space;
f = fj , qj ∈ Q is the set of vector fields with fj : R4 × U ×D → R4;
Init ⊆ Q× R4 is the set of initial discrete and continuous conditions;
Dom : Q→ 2R4
is the domain map;
E ⊆ Q×Q is the set of edges.
8 22

Microscopic Hybrid Automaton
-15 -10 -5 0 5 10 15
x2 [m/s]
0
50
100
150
200
x1 [
m]
Domains
q1
q2
q3
q4
unsafe
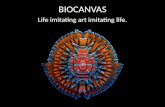
Definition of the time head-ways needed to stopthe vehicle in dierent situations:
TE : R4 → R, TR : R4 → R, TS : R4 → R (5)
⇓
Definition of the corresponding space head-waysthresholds:
emergency distance ∆E : R4 → R;
risky distance ∆R : R4 → R;
safe distance ∆S : R4 → R;
interaction distance ∆D : R4 → R.
A. Iovine et al., "Safe human-inspired mesoscopic hybrid automaton for autonomous vehicles." Nonlinear Analysis: HybridSystems, 2017.
9 22

Microscopic Hybrid Automaton
-15 -10 -5 0 5 10 15
x2 [m/s]
0
50
100
150
200
x1 [
m]
Domains
q1
q2
q3
q4
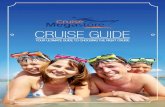
unsafeThe space head-way thresholds are used to define the discretestates and their domains:
1. q1: Free driving;
2. q2: Following I;
3. q3: Following II;
4. q4: Closing in.
Property
The set Ω =(⋃4
j=1Dom(qj) ∩X)
is robustly controlledinvariant.
10 22

Presentation Outline
1 Introduction
2 Model
3 Controller Design
4 Simulations
5 Conclusions
11 22

Problem Definition
Methodology: Model Predictive Control
12 22

Problem Definition
For every qj ∈ Q:
a prediction horizon Nj ∈ N is chosen;
a cost function Jj is chosen so that the various objectives receive dierent weights.
We make a prediction of the leader acceleration in the near future:
d(k) = [an(k), an(k + 1), ..., an(k +Nj − 1)]T
where
an(k + i) =
an(k), if 0 < vn(k + i− 1) < vmax
0, otherwise
13 22

Problem Definition
We define the output vector and the corresponding output reference vector as:
y = [x1 x2 x3 x4 − x2]T , yr = [∆Sdes 0 0 vdes]T (6)
The reference error is y = y − yr .
The instantaneous fuel consumption (or emission rate) is computed by the term:
exp(wTPCj z) (7)
where
PCj = PC+ for positive accelerations, PC
j = PC− for negative accelerations;
zT = [1 y3 y23 y33 ]T , wT = [1 y4 y
24 y34 ]T .
A. Trani et al., "Estimating vehicle fuel consumption and emissions based on instantaneous speed and acceleration levels",Journal of transportation engineering, 2002.
14 22

Problem Definition
minu(h), h=0,...,Nj
1
2
yT (Nj)Pj y(Nj) +Mj
Nj∑h=0
exp(wT (h)PCj z(h))
+
+1
2
Nj−1∑h=0
(yT (h)Gj y(h) + uT (h)Rju(h)
)s.t.
x(h+ 1) = Ax(h) +Buu(h) +Bddh(k) + Ee(x(h)), ∀ h ∈ N,x(0) = x
x(h) ∈ Ω, ∀ h ∈ N,u(h) ∈ U, ∀h ∈ N.
x = x(k) is the current state at time k.
15 22

Presentation Outline
1 Introduction
2 Model
3 Controller Design
4 Simulations
5 Conclusions
16 22

Simulations Results
Fuel optimization VS no fuel optimization
Two vehicles scenario
Sample time τ = 0.3s and prediction horizonNj = 10 ∀ jLeader speed profile: a first acceleration from velocity5m/s to velocity 18m/s and a deceleration to velocity3m/s
17 22

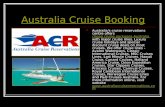
Speed and Acceleration Profiles
0 10 20 30 40 50 60
Time [s]
0
5
10
15
20
25
Sp
ee
d [
m/s
]
Speed profile
Leader
Follower fuel opt.
Follower no fuel opt.
0 10 20 30 40 50 60
Time [s]
-4
-3
-2
-1
0
1
2
3
4
5
Acce
lera
tio
n [
m/s
2]
Acceleration profile (follower)
Fuel optimization
No fuel optimization
18 22

Discrete State Profile
0 10 20 30 40 50 60
Time [s]
0.5
1
1.5
2
2.5
3
3.5
4
4.5
q [ ]
Discrete state profile (follower)
Fuel optimization
No fuel optimization
19 22

Distance Profile
0 10 20 30 40 50 60
Time [s]
0
10
20
30
40
50
60
Dis
tance [m
]
Distance profile
p fuel opt.
p no fuel opt.
20 22

Presentation Outline
1 Introduction
2 Model
3 Controller Design
4 Simulations
5 Conclusions
21 22

Conclusions
Main resultA Human-Inspired ACC for eco-driving for autonomous vehicles.
Goals
merging of hybrid automaton with predictive control strategy;
fuel optimization;
ACC able to mimic a human driver behavior.
22 / 22

Thanks for your aention!