A General-Purpose Platform for 3-D Reconstruction from Sequence of Images Ahmed Eid, Sherif Rashad,...
16
A General-Purpose Platform for A General-Purpose Platform for 3-D Reconstruction from Sequence 3-D Reconstruction from Sequence of Images of Images Ahmed Eid, Sherif Rashad, and Aly Farag Computer Vision and Image Processing Lab Department of Electrical and Computer Engineering Speed Scientific School University of Louisville URL: www.cvip.louisville.edu
-
Upload
blake-shaw -
Category
Documents
-
view
214 -
download
1
Transcript of A General-Purpose Platform for 3-D Reconstruction from Sequence of Images Ahmed Eid, Sherif Rashad,...

A General-Purpose Platform for 3-A General-Purpose Platform for 3-D Reconstruction from Sequence D Reconstruction from Sequence
of Imagesof Images
Ahmed Eid, Sherif Rashad, and Aly Farag
Computer Vision and Image Processing Lab
Department of Electrical and Computer EngineeringSpeed Scientific School
University of Louisville
URL: www.cvip.louisville.edu
The purpose of this project is two folds:
1- Propose a vision platform that lend itself for acquisition of calibrated sequence of images, and concurrently obtain a direct 3D reconstruction by laser scanning.
2- Implement the stereo- and space-carving based approaches for 3D reconstructions on a sequence of calibrated images. These reconstructions will be evaluated against the 3D scanning generated from a laser scanner.
Abstract
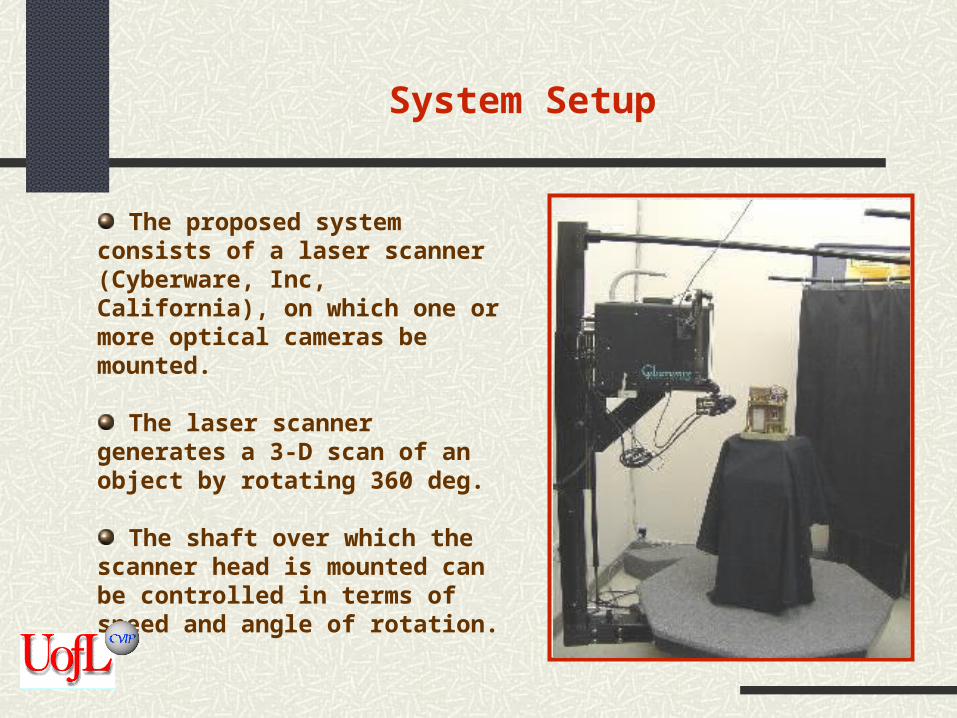
The proposed system consists of a laser scanner (Cyberware, Inc, California), on which one or more optical cameras be mounted.
The laser scanner generates a 3-D scan of an object by rotating 360 deg.
The shaft over which the scanner head is mounted can be controlled in terms of speed and angle of rotation.
System Setup
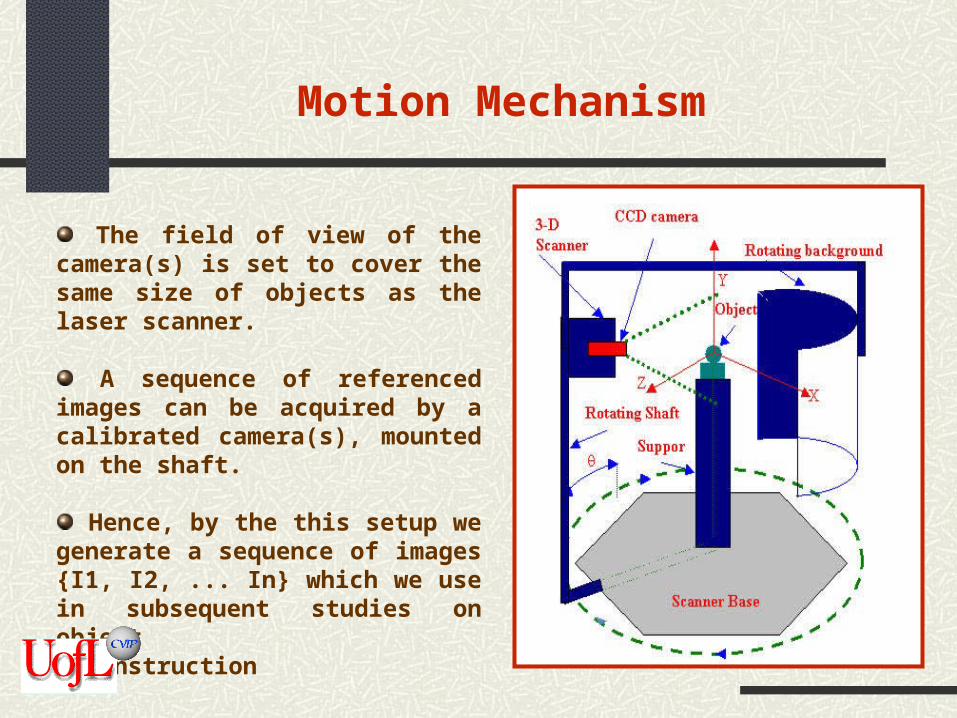
The field of view of the camera(s) is set to cover the same size of objects as the laser scanner.
A sequence of referenced images can be acquired by a calibrated camera(s), mounted on the shaft.
Hence, by the this setup we generate a sequence of images {I1, I2, ... In} which we use in subsequent studies on objectreconstruction
Motion Mechanism
Find points in two or more input images that correspond to the same point in the scene.
Use knowledge of the camera locations and triangulation to determine the depth of the scene point.
One of the main problems of stereo is the correspondence problem.
To solve this problem, a large number of stereo techniques rely heavily on assumptions such as the existence of specific features in the images to produce satisfactory results
(I) 3-D Reconstruction Using Stereo Techniques
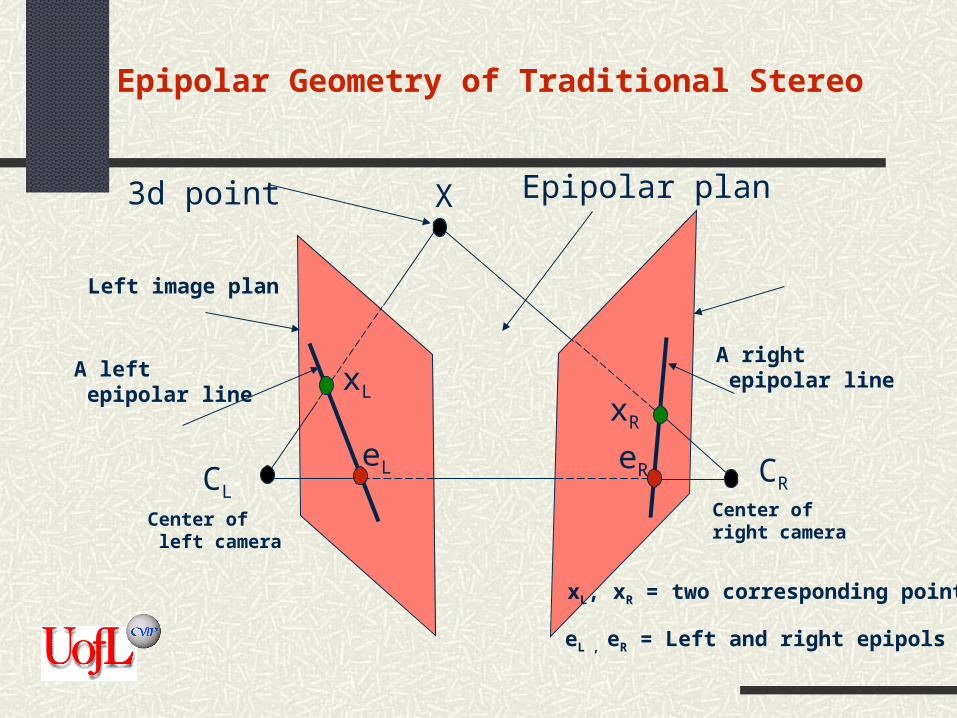
X
CLCR
eL eR
xLxR
Epipolar plan
Center of left camera
Center of right camera
3d point
xL, xR = two corresponding points
Left image plan
eL , eR = Left and right epipols
A right epipolar lineA left
epipolar line
Epipolar Geometry of Traditional Stereo
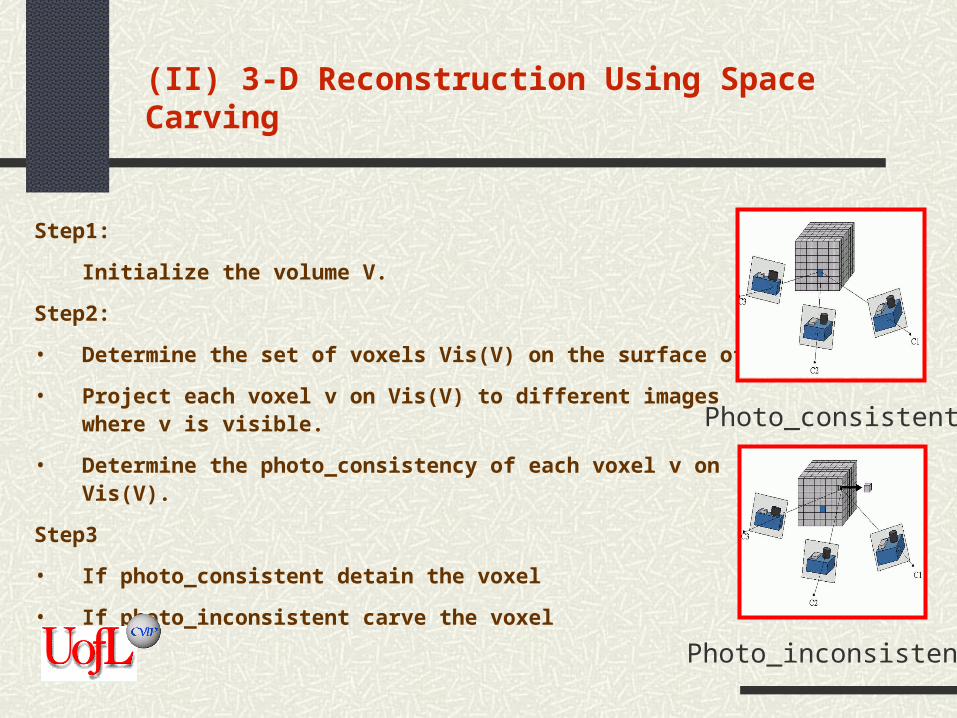
(II) 3-D Reconstruction Using Space Carving
Step1:
Initialize the volume V.
Step2:
• Determine the set of voxels Vis(V) on the surface of V.
• Project each voxel v on Vis(V) to different images where v is visible.
• Determine the photo_consistency of each voxel v on Vis(V).
Step3
• If photo_consistent detain the voxel
• If photo_inconsistent carve the voxel
Photo_inconsistent
Photo_consistent
(III) 3-D Laser Scanner
The 3-D scanner used in the proposed system is the Cyberware 3030.
Its dynamic Range accommodates varying lighting conditions and surface properties.
In operation, the 3030 shines a safe, low-intensity laser on an object to create a lighted profile.
A high-quality video sensor captures this profile from two viewpoints. The system can digitize thousands of these profiles in a few seconds to capture the shape of the entire object.
Simultaneously, a second video sensor in the scanner acquires color information.

Cyclograph Generation
m-cyclograph images (n x k)
x
y
=0=5
=360I1
I2
Ik
I1
k-Input images (n x m)
One Cyclograph image
C1 C2 Cm
x-y- Volume of input images
1
2
3
xo x
(IV) Panoramic Stereo
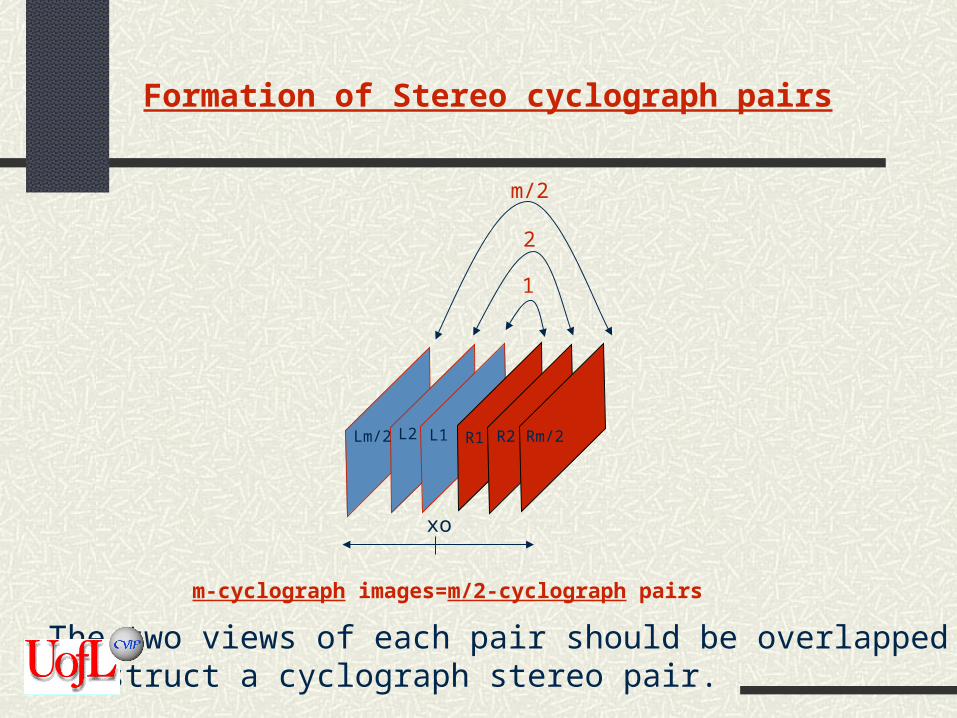
m-cyclograph images=m/2-cyclograph pairs
L2 L1 R2
xo
R1 Rm/2Lm/2
1
2
m/2
The two views of each pair should be overlapped to construct a cyclograph stereo pair.
Formation of Stereo cyclograph pairs

A Cyclograph Pair

Scanner
Space Carving
Stereo
Results: 3D Reconstruction

Scanner
Space Carving
Scanner
Stereo
Results: 3D Registration
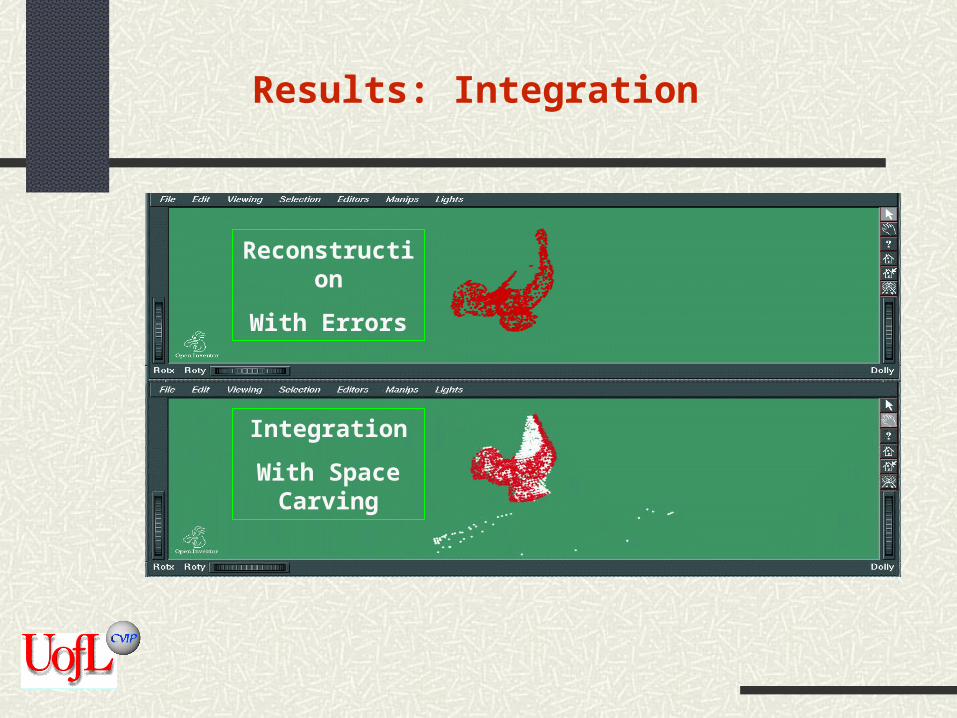
Reconstruction
With Errors
Integration
With Space Carving
Results: Integration

Input Images

Complete Model
Scanner Space Carving