A Five - Hole Pressure Probe for Fluid Flow

of 17
-
Upload
sattar-al-jabair -
Category
Documents
-
view
33 -
download
0
description
A Five - Hole Pressure Probe for Fluid Flow Measurements in Three - Dimensions
Transcript of A Five - Hole Pressure Probe for Fluid Flow
-
1
A Five - Hole Pressure Probe for Fluid Flow Measurements in Three - Dimensions .
Dr. Khald A. Ismael Dr. Jalal M. Jalil Mr. Sattar J. Habeeb
Mech. Eng. Dept. Mech. Eng. Dept. Mech. Eng. Dept. Technology University Military College of Eng. Technology University
Prof. Assist. Prof. Assist. Teacher
Keywords:- Flow measurement , pressure probes , calibrat ion devise .
ABSTRACT
A pressure probe which facilitates measurement of mean flow quantities in three dimension simultaneously is described. The surface pressure is sampled at five
location : on the axis of the probe and at four equispaced point on a line encircling this point on a line encircling this central point. This work is applied to an existing
calibration and application procedure for five-hole probe, therefor you must find the flow angles by design transverse mechanism in 3D. The polynomial curve-fit method fourth - order was used , a computer program was built for calibration and
calculation velocity vector ( magnitude and direction ) for wide-range of calibration based on experimental data . The sensitivity of the probe to the Reynolds number was
examined for range of Re = 1000 9000 , also the accuracy of the pressure data from the computer software and direct measurement data from the test section was good with range of error of approximately 3% .
five-hole probe
: 0
, ( ) ( )0
Re=1000-9000 , 3% 0
-
2
NOMENCLATURE
C Correction factor
pitchCP Pitch coefficient
staticCP Static pressure
coefficient
totalCP Total pressure coefficient
yawCP Yaw coefficient
D 2m / N, )P(P1
g Acceleration of gravity
H Head pressure, m
d Probe diameter, m
P Pressure , 2m / N
P Mean pressure, 2m / N
R Velocity
vector, sec / m
Re Reynolds number
= / dU
U Magnitude of free-stream
velocity z y,x, Coordinate
system wv, u, Velocity
component in 3D.
GREEK NOMENCLATURE
Pitch angle, degree
Yaw angle, degree
Probe angle, degree
Kinematics viscosity of air ,
sec / m2 Density
SUBSCRIPTS
s Static pressure
o Total pressure
1,2,3,4,5 Refer to tube number of the
probe
1. Introduction :- Although a variety of pressure probes have been devised for
decomposing the flow velocity vector , the most well known and widely used
is the five-hole pressure probe . The device is a streamlined axisymmetric body that point into the
flow. The pressure distribution on the surface of the probe depends on the
angle of incidence of the mean flow vector relative to the axis of the probe. To determine the magnitude and
orientation of the flow vector , the surface pressure is sampled at five
location : on the axis of the probe and at four equispaced points on a line encircling this central point [1] .
The pressure differentials between selected pairs of these point may be
related to the inflow velocity vector by using an appropriate calibration to deduce pitch and yaw direction.
Hypothetically,theoretical relationships for the potential flow around the body
may also be used [2] . Two commonly used shapes are the cylindrical tube with a hemispherical
nose and a spherical ball at the end of a slender cylinder. Central pressure tap
gives the conventional stagnation pressure when the flow vector is perpendicular to that point on the
surface. Yaw and pitch angles in clinations of
the flow vector with the axis of the probe result in a imbalance of pressures on pairs of holes. In this case
the spherical probe is used, This arrangement is sketched in fig.1.
The theory yields a format for interpreting the differential pressures between pairs of holes as function of
angles of pitch and yaw. For calibration, the probe may be
installed in a water or wind tunnel and aligned with the known flow direction.
-
3
Pressure differentials are then measured for selected angles of yaw
and pitch placed on the probe relative to the flow direction.
The purpose of this paper is to present a simplified calibration and
polynomial curve fitting forth - order method of using five-hole probe for
three dimension flow measurements and built a software computer Program for well range of calibration
of five - hole probe based on experimental data .
2. Probe Geometry :-
In the current work , five-hole probe was constructed by from five
stainless steel tubes of (1.0 mm) outside diameter by (0.6 mm) inside diameter, soldered together into a
(514 mm) of (5 mm) outside diameter stainless steel tube as shown in fig.2 .
The tube number (2) in the center is
filed perpendicular to its axis and the other four tubes surrounding tube number (2) are filed at probe angle
( 45 ). The ends of the tubes are cleaned out with a (0.6 mm) drill to
remove burrs. Each tube was coated with (5 mm) of load solder tube in
order to bend it smoothly by using tube bender [3] . An example , consider in fig. 3
the vector decomposition of the flow velocity (R) which is incident on the
five pressure taps (5,2,4,1,3) of a spherical probe. The center of the
coordinate axes coincides with the center of the probe. The holes (5,2,4) lie on a circle in the
xy-plane, (1,2,3) lie on a circle in the xz-plane. The angles between holes in
their respective planes all (probe angle 45 ). velocity vector (R) has a
component xyR in the xy- plane at an
yaw angle with the x-axis, and a
component xzR in the xz-plane at an
pitch angle with x-axis [4] .
3. Experimental Set-Up :-
Experiments were conducted
In low-speed open test section, with a
height 0.3m * 0.3m width * 0.3m length as shown as fig.4 .
The longitudinal freestream turbulence intensity was no greater than 0.6%
over the speed range of the experiments ( Re = 1000 to 9000).
The five-hole probe was mounted in a variable-angle calibrator in the center of the test section . The probe are
connected to the selection box ( Furness controls LTD.,type FCO9-6),
it has six pairs of channels with two rotary switches allow individual call up of any of the twelve solenoids in the
box. A micro-manometer ( Furness controls
LTD. , type FCO12) , was used to measure the pressure and the pressure differentials. The manometer has 1.%
accuracy , and measure maxP up
to OmmH 19.9 2 . This allows
the measurement of the
differential pressure between any two holes on a five-hole probe , plus the
comparison of any hole with a static source.
3.1 The Traversing Mechanism :-
To traverse the pressure probe , a standard traversing mechanism which
has a three-dimensional movability, was designed , The mechanism was
composed of two sliders, two rulers were fixed to the guides for measuring the distance traveled by the sliders in
both vertical and horizontal directions
-
4
in test models as shown as fig.5. The special instrument designed to
perform the calibration runs , consisting of vertical and horizontal
protractor with sockets that fixed in the traverse mechanism, to enable the probe to yaw ( angular deviation in
the plane ) and pitch ( angular deviations about the axis of the plane).
The two protractors control the yaw and pitch angles as shown in fig.5.
3.2 Pressure Probes:-
3.2.1 Static-Pitot Tube:-
A standard ellipsoidal nosed Static - pitot tube was used to measure the tunnel reference
velocity . It had an external
diameter ( 7.98mmd ),a stem of (458 mm) long , a total pressure
hole of (1.32 mm ) diameter and seven static holes distance equals ( 8.02d ) .
The correcting of the reading of the tube was determined according
to the British standard [5] , as followsin :-
2RCair
0.5static
Ptotal
Pgwater
) (HP
where the above equation called eq.(1), and
CC
C =correction factore.
C =stem - static hole distance term.
= viscosity term.
=distance of the tube from wall term for this work
C =0.9975 , =0.0 , may be
determined from ref.[4].
3.2.2 Five-hole probe:-
This device is a spherical ball
at the end of a slender cylinder as
shown in fig.1. , used to determine and direction of the flow velocity vector R.
This probe was also used for static pressure measurement [6].For the five-
hole probe the calibration coefficients are defined as :-
D )P(P2CP
D )PP(CP
DP4)(P5CP
DP1)(P3CP
total
Sstatic
yaw
pitch
(2)
where
P - P2 D
4 / P4)P3P2(P5P
..(3)
The preceding sets of calibration
coefficients were found to be the most convenient and to have high sensitivities.
Characteristic of the steady term CP with respect to the pitch and yaw
angles must be determined experimentally because they deviate gradually from the theoretical
characteristics when the angle between the velocity vector and the radial line
through the pressure hole becomes large [6].
4. Calibration Procedure :-
The probe was calibrated in a small test section, in the free stream of inlet region the spatial variation of
velocity was 0.5% and the turbulence level 0.6% . A velocity
range ( 2 /secm 16.871.87 ) were used for the calibration, the probe was
held on a joint- tracked guide rod through out the calibration and remained fixed in that rod during use,
the rod was held in a traversing mechanism which allowed translation
-
5
of the probe along, and rotation about its axis.
A protractor permanently attached to the traverse mechanism was used to
determine rotation (yaw angle ). The mechanism was mounted on an arm which could be rotated an axis
normal to the probe axis and the test section axis. The arm rotated about the
probe tip, then the pitch angle could be altered without moving the probe tip.
Point calibration were carred out at all combination of pitch and yaw angles
10 in 20 to 20 increments , at each orientation the four pressure
coefficients totalstaticpitchyaw CP,CP,CP,CP ,
and the air velocity were recorded. The four pressure coefficients were
calculation with the relationships :
),f(CP
),f(CP
),f(CP
),f(CP
total
static
yaw
pitch
(4)
Were then determined at regular intervals in and .
5. Calibration Results :-
The calibration coefficient at an air velocity of ( 15 m/sec ) are
presented in fig.6 and 7. , they are presented in the following forms:-
i. yawpitch CP vs. CP at various and .
ii. yawstatic CP vs. CP at various and .
iii. vs. CPtotal at various .
A computer program based on above algorithm was wrote in visual basic
langouge to meet the requirements of the problem see fig.9. The calibration
process is very sensitive to the probe alignment, probe support, and any
blockage so the procedure is repeated more times that get smoothing curves
where the polynomial curve-fit method fourth-order was used. The accuracy of
the processed data shown in table.1. was good with a range of errors of approximately 3% .
5. Measurement Procedure for flow field:-
Before starting the reading, two tests are made to check the
Instrumentation . The first test is to ensure that the pressure reading in
micro - manometer is zero before running. After running, the second test is to make sure of there is no leaking in
the pressure lines. In this case the five-hole probe is fitted with a cap, which
makes sure that the tubes of the probe connected to each others, and hence register the same pressure.
Then, if there is any significant difference between the two reading for any of the pressure , there is a leak in
one of the pressure lines. The relevant connection between the probe , and the
pressure can then be checked [7,8] .
5.1 Flow Angle Calculation :-
The computer program reads
the data P,PP5,P4,P3,P2,P1, S while
the coefficient of the calibration curves already are stored in the program. The
first step for the computer program is to calculate the drift of the datum pressure readings. It is assumed to drift
linearly with the number of reading taken . The pressures coefficient
totalstaticpitchyaw CP , CP , CP , CP are
calculated for each measuring point. The computer program is then used to
carry out two tests to check that and are within the calibration range. The
-
6
first test to check pitch angle by comparing the values of the pressure
coefficient pitchCP to the maximum
values of the calibration curves in
fig.6. If is in the calibration curve , the second test is carried out ,otherwise the program moves to the next
measurnning point . The second test to check in two
stages, the first stage is to look at the values of P4)(P2P5),(P2 if these
value are both less than zero then is out of the calibration range, then the program moves to the next
measurnning point . In the second stage the values of the
pressure coefficient yawCP are
compared with the maximum and minimum values of the calibration
curves in fig.6. If is out of calibration range, the program again
moves to the next measurning point , if is within the calibration range, the calculation procedure continues .
Then we check from fig.7 by using the same value of and
totalstatic CP,CP
to find , must be the same value of from fig.6 . Further iteration on
the fitting curves in fig.6 and 7. , until and do not vary significantly ( the error in and
is less then 0.5% degrees) with furthe computation.
5.2 Velocity Calculation :-
After obtaining the values of
and , they are used with fitting curves in fig.7 according to the values
of and the values of
totalstatic CP,CP calculated and from
these values we get P,PS . Then from
eq.1. we get velocity vector R after determine the air density
from the atmospheric pressure and
temperature at the time of the experiment .
The value of yaw angle modified
by adding the probe angle ( 45 ) ( measured between the nose of the probe and the perpendicular to the measurement plane , see fig.2 ).
The component of the relative velocity can be determined :-
)cos()cos(Ru
) sin()cos(Rw
)sin(Rv
c
c
c
..(5)
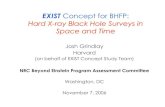
6. Reynolds Number Sensitivity :-
Since a calibration is typically performed at a single velocity, where measurements are often acquired in
flows of spatially varying velocity .The sensitivity of the probe to the Reynolds
number was examined as shown in fig.9.Pitot-static probes and directional
pressure probes typically exhibit a sensitivity at low flow velocity. For Re < 1000-3000 [6].
So the investigation was focused on flows with velocities lower than the
calibration velocity .
7. Conclusions :-
Experiments were conducted in a low-speed test section with a spherical five-hole pressure probe , to
examine the calibration persuader using polynomial curve fitting method
fourth - order. A general computer program was built for calibration five hole probe based on experimental
data. The sensitivity of the probe to the Reynolds number was also studied.
The result was very suitable with measurement data.
-
7
8. References :- (1) I . C. Shepherd , A Four - Hole Pressure Probe of Fluid Flow
Measurements in Three Dimensions
. ; ASME , Journal of Fluids Engineering ,December 1981,vol.103 ,
pp.590-594. (2) Schlichting , Boundary Layer
Theory . ; McGraw-Hill , New York, 2000 .
(3) N. Sitaram , A.L. Treaster , A Simplified Method of using Four-
Hole Probes to Measure Three-
Dimensional Flow Fields . ; Journal
of Fluids Engineering ,March 1985 ,vol.107 , pp.31-35 .
(4) Richard J. Goldstein , Fluid Mechanics Measurements . ; Berlin ,1983 .
(5) Britsh-Standaed 1042 , part :2.1 .
(6) D. Sumner , Calibration Method for a Seven-Hole Pressure Probe . ;
Dep. of Mechanical Engineering , University of Saskatchewen , Canada ,
internet paper , 2000 . (7) R . K. Jain , Mechanical
and Industrial Measurment . ; seventh edition , 1988 .
(8) Robert P. Benedict Fundamentals of Temperature , Pressure , and Flow
Measurement . ; third edition ,1984 .
Pitch Angle
in (deg.)
Yaw Angle in (deg.)
Velocity Vector R
in (m/sec )
Actual Measu
-red
Error
%
Actual Measu-red
Error
%
Actual Measu-red
Error
%
-20 -19.8 1 -20 -20.4 1.9 15.6 15.9 1.8
-20 -19.7 1.5 0 -0.5 1 15.9 16.1 1.2
-20 -19.9 0.5 20 20.5 2.4 15 14.8 1.3
0 0. 0. 20 19.4 3 15.7 16.1 2.4
0 -0.1 1 0 -0.3 1 15.1 14.9 1.3
0 0. 0. -20 -20.6 2.9 15.8 16 1.2
+20 19.7 1.5 -20 -20.4 1.9 15.9 16.3 2.4
+20 19.9 0.5 0 -0.4 1 15 14.7 2
+20 19.6 2 20 19.5 2.5 15.1 15.4 1.9
-
8
Table(1). Probe Measurement Error.
Fig. 1.b. Five-hole probe geometry.
514
42 5
8
8 1
2 3
4 5
All dimensions in mm Front view
Fig. 1.a. 3D presentation of traversing mechanism.
-
9
Rxy
R
Rxz
x
z
y
x
z
y R
3
2
4
5 1
Fig. 3. Vector decomposition of hole geometry and flow direction for a 5-hole pitot tube.
P3 P5
P2
P1 P4
Spherical Tip
=45 Reference
Line
Rxy
Rxz R
Yaw Plane
Pitch Plane Flow Direction
x y
z (b)
1 2 3
5
45
15mm
1
2
5 3 5
2
3 4
5mm
42mm
3
4 5 1 ID 0.6mm
OD 1mm
Fig. 2. Five-hole probe construction.
(a)
-
11
8.8.8.8
2
Interface Cart
Computer
Main 6V
Main 220V
1
3
Off
On
Pressure Static
1 2 3 4 5
Pressure
Pressure
1 2 3 4 5 S
8
S 1
2 3
4 5
4
5
6
Air
7
11
10
12
9
1. Selection box (FC091-Furness) 5. Five-hole probe 9. Thermometer
2. Micro-manometer (FC92-Furness) 6. Traversing mechanism 10. Test section
3. Power supply 7. Fan 11. Inlet flow region
4. Ruler 8. P.V.C. tubes (1mmID, 3mmOD) 12. Exit flow region
Fig. 4. Schematic arrangement of experimental rig.
-
11
-
13
Vertical protector
(Pitch angle )
Ball & socket joint
Wind tunnel test section Flow direction
Vertical guide
Vertical slider 5-Hole probe
Ruler
Horizontal guide Horizontal slider
Model test section
b. Standard traversing mechanism
a. Calibration traversing mechanism
Fig. 5. Traversing mechanism for calibration and models tests.
Horizontal protector
(Yaw angle )
-
14
-3.00 -1.00 1.00-4.00 -2.00 0.00 2.00
Cp pitch
-1
1
3
-2.00
0.00
2.00
4.00
Cp
yaw
Alfa ( Pitch Angle ) = -20,-10,0,10,20
Beta ( Y
aw A
ng
le ) =20,10,0,-10,-20
-10.00 10.00-20.00 0.00 20.00
Alfa ( Pitch Angle )
-0.5
0.5
-1
0
1
Cp
to
tal
Cp
sta
tic
Yaw angle = 20Yaw angle = 10Yaw angle = 0Yaw angle = -10Yaw angle = -20
Fig. 6. Calibration curves for CPyaw respect to CPpitch
Fig. 7. Calibration curves for CPtotal and CPstatic respect to pitch angles
-
15
2.5E+3 7.5E+30.0E+0 5.0E+3 1.0E+4
Reynolds Number
-1.00
1.00
-2.00
0.00
2.00
Cp
pit
ch
Yaw and Pitch angles = 20Yaw and Pitch angles = 10Yaw and Pitch angles = 0Yaw and Pitch angles = -10Yaw and Pitch angles = -20
2.50E+3 7.50E+30.00E+0 5.00E+3 1.00E+4
Reynolds Number
0.05
0.15
0.00
0.10
0.20
Cp
ya
w
2.50E+3 7.50E+30.00E+0 5.00E+3 1.00E+4
Reynolds Number
0.20
0.60
0.00
0.40
0.80
Cp
sta
tic
2.50E+3 7.50E+30.00E+0 5.00E+3 1.00E+4
Reynolds Number
-0.25
0.25
-0.50
0.00
0.50
Cp
to
tal
(a) (b)
(c) (d)
Fig. 8. Reynolds number effect on calibration curves.
-
16
Start
Input No. of measuring point = N , I = 1
I = I + 1, (i)old = 0,
(i)old = 0
Read P1, P2, P3, P4, P5, PS, Pt
Read all the coefficients of calibration curves. Fig. 6 and Fig. 7
Calculate , CPyaw(i), CPpitch(i), CPstatic(i), CPtotal(i)
IF CPpitch(i) < CPpitchmax AND
IF CPpitch(i) > CPpitchmin from Fig. 6
IF (P2 - P3) AND (P2 - P1)
A Yes No
IF CPyaw(i) < CPyawmax AND
IF CPyaw(i) > CPyawmin from Fig. 6
A
-
17
End
(i)old = (i)
(i)old = (i)
IF abs[ (i) - (i)old ]
AND
IF abs[ (i) - (i)old ]
IF (P2 P4) AND (P2 P5)
B Accuracy = < < Accuracy
0<
1 B
A