A Dynamically Adapting Weather and Dispersion Model: The...
33
2044 VOLUME 128 MONTHLY WEATHER REVIEW q 2000 American Meteorological Society A Dynamically Adapting Weather and Dispersion Model: The Operational Multiscale Environment Model with Grid Adaptivity (OMEGA) DAVID P. BACON,NASH’AT N. AHMAD,ZAFER BOYBEYI,THOMAS J. DUNN,MARY S. HALL,PIUS C. S. LEE, R. ANANTHAKRISHNA SARMA, AND MARK D. TURNER Center for Atmospheric Physics, Science Applications International Corporation, McLean, Virginia KENNETH T. WAIGHT III, STEVE H. YOUNG, AND JOHN W. ZACK MESO Inc., Troy, New York (Manuscript received 30 March 1999, in final form 13 July 1999) ABSTRACT The Operational Multiscale Environment Model with Grid Adaptivity (OMEGA) and its embedded Atmo- spheric Dispersion Model is a new atmospheric simulation system for real-time hazard prediction, conceived out of a need to advance the state of the art in numerical weather prediction in order to improve the capability to predict the transport and diffusion of hazardous releases. OMEGA is based upon an unstructured grid that makes possible a continuously varying horizontal grid resolution ranging from 100 km down to 1 km and a vertical resolution from a few tens of meters in the boundary layer to 1 km in the free atmosphere. OMEGA is also naturally scale spanning because its unstructured grid permits the addition of grid elements at any point in space and time. In particular, unstructured grid cells in the horizontal dimension can increase local resolution to better capture topography or the important physical features of the atmospheric circulation and cloud dynamics. This means that OMEGA can readily adapt its grid to stationary surface or terrain features, or to dynamic features in the evolving weather pattern. While adaptive numerical techniques have yet to be extensively applied in atmospheric models, the OMEGA model is the first model to exploit the adaptive nature of an unstructured gridding technique for atmospheric simulation and hence real-time hazard prediction. The purpose of this paper is to provide a detailed description of the OMEGA model, the OMEGA system, and a detailed comparison of OMEGA forecast results with data. 1. Introduction Over the past 40 years, numerical weather prediction has undergone a decade-by-decade advance. The 1960s saw the initial success of the barotropic model. In the 1970s came the baroclinic model and the introduction of the university-born Regional Atmospheric Modeling System (Pielke et. al. 1992), and the Pennsylvania State University–National Center for Atmospheric Research (Penn State–NCAR) Mesoscale Model now in its fifth version (Grell et. al. 1994). In the 1980s increased com- putational power allowed the introduction of more elab- orate model physics. In the 1990s mesoscale models have driven toward finer and finer resolutions, mostly through the use of nested grids (e.g., the Advanced Re- gional Prediction System model; Xue et al. 1995) or Corresponding author address: Dr. David P. Bacon, Science Ap- plications International Corporation, 1710 Goodridge Dr., P.O. Box 1303, McLean, VA 22102. E-mail: [email protected] variable horizontal resolution (e.g., the Global Envi- ronmental Multiscale model; Co ˆte ´ et al. 1998a,b). At the same time meteorology was benefiting from this research and technology boom, computational fluid dynamics (CFD) researchers were creating new inno- vative numerical techniques designed to model fluid flows around complex boundaries. In the 1970s and ear- ly 1980s the models developed for aerospace engineer- ing and plasma physics were surprisingly similar to their counterparts in the atmospheric sciences. The grids were composed of regular, rectangular cells extending from no-slip or free-slip surfaces. As more computational power became available and atmospheric modelers were pushing more physics into their models, CFD practi- tioners were busy refining complex gridding techniques around irregular surfaces. The Operational Multiscale Environmental Model with Grid Adaptivity (OMEGA) was developed under a program that linked the new gridding technologies of computational fluid dynamics with state-of-the-art nu- merical weather prediction. This paper will describe the model grid structure, the dynamical equations, physics, and parameterizations. It will also introduce the con-
Transcript of A Dynamically Adapting Weather and Dispersion Model: The...

2044 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
q 2000 American Meteorological Society
A Dynamically Adapting Weather and Dispersion Model: The OperationalMultiscale Environment Model with Grid Adaptivity (OMEGA)
DAVID P. BACON, NASH’AT N. AHMAD, ZAFER BOYBEYI, THOMAS J. DUNN, MARY S. HALL, PIUS C. S. LEE,R. ANANTHAKRISHNA SARMA, AND MARK D. TURNER
Center for Atmospheric Physics, Science Applications International Corporation, McLean, Virginia
KENNETH T. WAIGHT III, STEVE H. YOUNG, AND JOHN W. ZACK
MESO Inc., Troy, New York
(Manuscript received 30 March 1999, in final form 13 July 1999)
ABSTRACT
The Operational Multiscale Environment Model with Grid Adaptivity (OMEGA) and its embedded Atmo-spheric Dispersion Model is a new atmospheric simulation system for real-time hazard prediction, conceivedout of a need to advance the state of the art in numerical weather prediction in order to improve the capabilityto predict the transport and diffusion of hazardous releases. OMEGA is based upon an unstructured grid thatmakes possible a continuously varying horizontal grid resolution ranging from 100 km down to 1 km and avertical resolution from a few tens of meters in the boundary layer to 1 km in the free atmosphere. OMEGAis also naturally scale spanning because its unstructured grid permits the addition of grid elements at any pointin space and time. In particular, unstructured grid cells in the horizontal dimension can increase local resolutionto better capture topography or the important physical features of the atmospheric circulation and cloud dynamics.This means that OMEGA can readily adapt its grid to stationary surface or terrain features, or to dynamicfeatures in the evolving weather pattern. While adaptive numerical techniques have yet to be extensively appliedin atmospheric models, the OMEGA model is the first model to exploit the adaptive nature of an unstructuredgridding technique for atmospheric simulation and hence real-time hazard prediction. The purpose of this paperis to provide a detailed description of the OMEGA model, the OMEGA system, and a detailed comparison ofOMEGA forecast results with data.
1. Introduction
Over the past 40 years, numerical weather predictionhas undergone a decade-by-decade advance. The 1960ssaw the initial success of the barotropic model. In the1970s came the baroclinic model and the introductionof the university-born Regional Atmospheric ModelingSystem (Pielke et. al. 1992), and the Pennsylvania StateUniversity–National Center for Atmospheric Research(Penn State–NCAR) Mesoscale Model now in its fifthversion (Grell et. al. 1994). In the 1980s increased com-putational power allowed the introduction of more elab-orate model physics. In the 1990s mesoscale modelshave driven toward finer and finer resolutions, mostlythrough the use of nested grids (e.g., the Advanced Re-gional Prediction System model; Xue et al. 1995) or
Corresponding author address: Dr. David P. Bacon, Science Ap-plications International Corporation, 1710 Goodridge Dr., P.O. Box1303, McLean, VA 22102.E-mail: [email protected]
variable horizontal resolution (e.g., the Global Envi-ronmental Multiscale model; Cote et al. 1998a,b).
At the same time meteorology was benefiting fromthis research and technology boom, computational fluiddynamics (CFD) researchers were creating new inno-vative numerical techniques designed to model fluidflows around complex boundaries. In the 1970s and ear-ly 1980s the models developed for aerospace engineer-ing and plasma physics were surprisingly similar to theircounterparts in the atmospheric sciences. The grids werecomposed of regular, rectangular cells extending fromno-slip or free-slip surfaces. As more computationalpower became available and atmospheric modelers werepushing more physics into their models, CFD practi-tioners were busy refining complex gridding techniquesaround irregular surfaces.
The Operational Multiscale Environmental Modelwith Grid Adaptivity (OMEGA) was developed undera program that linked the new gridding technologies ofcomputational fluid dynamics with state-of-the-art nu-merical weather prediction. This paper will describe themodel grid structure, the dynamical equations, physics,and parameterizations. It will also introduce the con-

JULY 2000 2045B A C O N E T A L .
cepts and techniques of dynamic grid adaptation andone case study with extensive analysis that provides avalidation of the model. Tests have been performed onseveral components of the model; significant ones, suchas tests of the advection scheme, are presented in thepaper. The final testing of the model, however, is in itsperformance. OMEGA has been running in an opera-tional mode at several sites for the past three years; ithas also performed well in several field experiments. Itis not practical to present all of the results in one paper,however; so we present a single case study that wasespecially challenging due to the scarcity of data overthe domain and the complexity of the terrain involved.
OMEGA is a multiscale, nonhydrostatic atmosphericsimulation model with an adaptive grid that permits aspatial resolution ranging from roughly 100 km to lessthan 1 km without the need for nested grids.
This paper will introduce the meteorological com-munity to OMEGA’s unstructured grid approach to nu-merical weather prediction and real-time hazard predic-tion. OMEGA was designed as a multiscale simulationtool that simulates finescale flows without the need formultiple nested grids. OMEGA was built to address at-mospheric transport and diffusion applications. To im-prove the fidelity of hazardous dispersion models, it isessential that the meteorological forecast itself be im-proved. This is because the modeling of atmosphericdispersion involves virtually all scales of atmosphericmotion from microscale turbulence to planetary-scalewaves.
Current operational atmospheric simulation systems(Hoke et al. 1989; Janjic 1990; Mesinger et al. 1988)use fixed grid spacing or rely on nesting to achieve acascade of scales. The trick to using these models inforecasting mode is to place the nest over all areas ofconcern and to do so within economical and compu-tational limits. Even with recent advances in compu-tational power (McPherson 1991), the current architec-ture and physics of today’s generation of atmosphericmodels cannot fully simulate the scale interaction of theatmosphere. Although several groups have developednonhydrostatic, nested (multiply nested in some cases)atmospheric models (Dudia 1993; Skamarock andKlemp 1993), these represent an incremental evolution-ary path in atmospheric simulation; as long as the samebasic physics is solved, with roughly the same order ofaccuracy, and the same grid resolution, the computa-tional performance of different simulation systems mustbe roughly the same.
For the reasons given above, it is impossible to changethe basic performance of an atmospheric simulation sys-tem without changing the basic paradigms utilized.OMEGA advances the state of the art in numericalweather prediction through the application of advancednumerical methods including a dynamically adaptingtriangular prism computational mesh; it advances thestate of the art in dispersion modeling by embeddingthe dispersion calculation within the NWP model giving
it access to the full resolution of the atmospheric sim-ulation at every time step.
The basic philosophy of OMEGA development hasbeen the creation of an operational tool for real-timehazard prediction. The model development has beenguided by two basic design considerations in order tomeet the operational requirements: 1) the application ofan unstructured mesh numerical technique to atmo-spheric simulation, and 2) the use of an embedded at-mospheric dispersion algorithm. In addition, as an op-erational tool, OMEGA was constructed using the max-imum amount of automation, in model configuration,data ingest, data quality control, and data assimilation,grid generation, model operation, and postprocessing.
The first version of OMEGA (v. 1.0) went into op-eration in 1995. Since that time, a large number of ad-ditions and improvements have been made to the modelincluding new hydrodynamic solvers, new surface andboundary layer models, and new system capability. Thispaper presents the current version of the OMEGA mod-eling system (v. 4.0) and a case study utilizing the modelin a stressing, data-sparse situation.
The OMEGA modeling system is an operational real-time meteorological forecasting and atmospheric dis-persion system. The OMEGA system consists of thefollowing:
R routines to maintain and manage real-time weatherdata feeds from the National Oceanic and Atmospher-ic Administration, National Centers for Environmen-tal Prediction (NCEP), and/or the U.S. Navy FleetNumerical Meteorology and Oceanography Center(FNMOC);
R worldwide datasets for surface elevation, land/water,vegetation coverage, soil type, land use, deep soil tem-perature, deep soil moisture, and sea surface temper-ature at varying resolutions;
R an integrated graphical user interface (XOMEGA) thatprovides a user-friendly method for rapid model re-configuration;
R the OMEGA grid generator that accesses the surfacedatasets and creates OMEGA grid and terrain files;
R a meteorological data preprocessor that ingests grid-ded terrain, gridded meteorological analyses and fore-casts, and raw observations, and performs a detailedquality control of the ingested data, followed by anoptimum interpolation (OI) data assimilation to pro-duce initial and boundary conditions for OMEGA;
R the OMEGA atmospheric simulation model and itsembedded Atmospheric Dispersion Model (ADM);
R the OMEGA graphical postprocessing tool (XGRID)that enables the user to display OMEGA output astwo-dimensional slices (horizontal slices overlaid onmapping information from the Digital Chart of theWorld or vertical slices), skew T–logp profiles for anylocation, and animations; and
R additional postprocessors to provide for data extrac-tion and reformatting for external applications.

2046 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
TABLE 1. An overview of OMEGA.
Governing equations Fully nonhydrostaticDimensionality 3DGrid structure Unstructured triangular prismsGrid adaptivity Both static and dynamic grid adaptationCoordinate system Rotating Cartesian coordinatesNumeric Finite volumePBL Treated separately as viscous sublayer, surface layer, and transition layerTurbulence closure Order 1.5 turbulent kinetic energy closureCumulus parameterization Modified Kuo schemeMicrophysics Extensive bulk waterRadiation Shortwave absorption by water vapor and longwave emissivities of water vapor and
carbon dioxideLower boundary Based on Monin–Obukhov similarity theoryUpper boundary Rigid, free-slip surfaceLateral boundaries Radiative boundary condition, large-scale nudging boundary conditionInitialization Based on 4D data assimilationTransport and diffusion Embedded Eulerian and Lagrangian (Monte Carlo particle and probabilistic puff )
aerosol dispersion algorithms
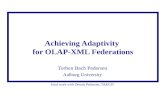
FIG. 1. OMEGA grid element.
The resulting modeling system is capable of rapidreconfiguration for operation anywhere in the world,with automatic linkage to baseline datasets and real-timemeteorological data feeds. The description of the maincomponents of the system will be discussed in the fol-lowing sections.
2. The OMEGA model description
The basic features of the OMEGA model are providedin Table 1. OMEGA is a fully nonhydrostatic, three-dimensional prognostic model. It is based on an adap-tive, unstructured triangular prism grid that is referencedto a rotating Cartesian coordinate system. The modeluses a finite-volume flux-based numerical advection al-gorithm derived from Smolarkiewicz (1984). OMEGAhas a detailed physical model for the planetary boundarylayer (PBL) with a 2.5 level Mellor and Yamada (1974)closure scheme. OMEGA uses a modified Kuo schemeto parameterize cumulus effects (Kuo 1965; Anthes1977), and an extensive bulk water microphysics pack-
age derived from Lin et al. (1983). OMEGA models theshortwave absorption by water vapor and longwaveemissivities of water vapor and carbon dioxide usingthe computationally efficient technique of Sasamori(1972). OMEGA uses an optimum interpolation analysisscheme (Daley 1991) to create initial and boundary con-ditions and supports piecewise four-dimensional dataassimilation using a previous forecast as the first guessfor a new analysis. Finally, OMEGA contains both Eu-lerian (grid based) and Lagrangian (grid free) dispersionmodels embedded into the model.
a. The OMEGA grid structure
A unique feature of the OMEGA model is its un-structured grid. The flexibility of unstructured grids fa-cilitates the gridding of arbitrary surfaces and volumesin three dimensions. In particular, unstructured grid cellsin the horizontal dimension can increase local resolutionto better capture topography or the important physicalfeatures of atmospheric circulation flows and cloud dy-namics. The underlying mathematics and numerical im-plementation of unstructured adaptive grid techniqueshave been evolving rapidly, and in many fields of ap-plication there is recognition that these methods aremore efficient and accurate than the structured logicalgrid approach used in more traditional codes (Baum andLohner 1994; Schnack et al. 1998). To date, however,unstructured grids and grid adaptivity have not beenused in the atmospheric science community (Skamarockand Klemp 1993). OMEGA represents the first attemptto use this CFD technique for atmospheric simulation.
OMEGA is based on a triangular prism computationalmesh that is unstructured in the horizontal dimensionand structured in the vertical (Figs. 1 and 2). The ra-tionale for this mesh is the physical reality that the at-mosphere is highly variable horizontally, but alwaysstratified vertically. While completely unstructuredthree-dimensional meshes have been used for other pur-

JULY 2000 2047B A C O N E T A L .
FIG. 2. OMEGA coordinate system and vertical alignment ofOMEGA grid.
poses (Baum et al. 1993; Luo et al. 1994), the benefitof having a structured vertical dimension in an atmo-spheric grid is a significant reduction in the computa-tional requirements of the model. Specifically, the struc-tured vertical grid enables the use of a tridiagonal solverfor implicit solution of both vertical advection and ver-tical diffusion. Since in many grids the vertical gridspacing is one or more orders of magnitude smaller thanthe horizontal grid spacing, the ability to perform ver-tical operations implicitly relaxes the limitation on thetime step.
In discussing unstructured grids, it is first necessaryto define the elemental dimensional objects that describethe properties of a volumetric mesh. The lowest-orderobject of a grid is the vertex, which is specified by itsposition (x, y, z). An edge conveys the connectivity ofthe mesh and is defined by the indices of its startingand terminating vertices. The face represents the inter-face area between adjacent volumetric cells and can bedescribed from the list of edges that bound it, or by thesequence of vertices that form its corners. The cell orcontrol volume is in turn specified by the list of facesthat contain it. In this volumetric mesh, scalar quantitiesare defined in the cell centroid, while the vector quan-tities are defined at the center of vertically stacked faces(Fig. 1).
On an unstructured grid, the number of edges thatmeet at a vertex is arbitrary. Consequently there is nolonger a simple algebraic construct that can be used todeduce the relationship of indices for the various ele-mental objects, as in the case of structured grids thathave been used as the basic structure for atmosphericand ocean circulation models up until now. Rather, the
formation of the grid is tied to the actual solution ofthe model equations and to the topography. This meansthat the initial grid can be readily adapted to surfacefeatures or other fixed terrain features as well as theinitial weather.
An important feature of the unstructured triangulargrid methodology is the calculation of the normal toeach face, which is required to calculate the flux acrossthe face. Since these normals must be computed, thereis no benefit from orienting the grid in any particularfashion, so long as the numerical resolution is sufficientto evaluate the critical fluxes. This leads to a naturalseparation between the coordinate system for the fun-damental equation set and the grid structure. The co-ordinate system can be as simple as possible (such asCartesian) while the grid structure, in this coordinatesystem, is extremely complex. OMEGA uses a rotatingCartesian coordinate system, but the grid structure isterrain following. Figure 2 shows a rotating Cartesiancoordinate system in which the origin is the center ofthe earth, the z axis passes through the North Pole, thex axis passes through the intersection of the equator andthe prime meridian, and the y axis is orthogonal to both.
In this coordinate frame, the equations of motion arein their simplest possible form (without going into anonrotating frame that would lead to unusual boundaryconditions as the surface terrain moved through the grid)with only two terms that are somewhat nonconventional:gravity and the Coriolis acceleration. Gravity in thisframe is directed in the radial (2r) direction, whichimplies that it potentially has components in all threecoordinate directions. The Coriolis force is by definition22rV 3 v and likewise has components in all threedirections.
An important aspect of the OMEGA grid structure isthat vertically stacked cells all possess the same foot-print. This is accomplished by creating a surface gridand then projecting radials from the center of the earththrough the vertices of this grid. Horizontal layers areconstructed by specifying a set of vertices along eachradial (Fig. 2). Because the OMEGA grid structure re-sults in the mixing of the earth-relative horizontal andvertical components, it is essential that the numericalscheme be able to separate these. Given a grid structurethat may be a few meters in vertical resolution and afew kilometers or a few tens of kilometers in horizontalresolution, the numerical resolution must be accurate tobetter than 1 part in 105.
b. Fundamental equation set
In this section, we document the fully elastic non-hydrostatic equation set used in OMEGA, including theapplicable assumptions. For brevity, we classify the fivemixing ratios for water substances into two groups: pre-cipitating water substances, Qp (where the subscript pdesignates either rain or snow), and nonprecipitatingwater substances, Qn (where n designates either ice crys-

2048 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
tals, water vapor, or water droplets). Furthermore, wecast the equations in their conservative form consistentwith the fully elastic mass-conservation equation (]r/]t5 2= · rV). This form is better suited for the state-of-the-art upwind advection schemes we have used, whichhave significantly less numerical diffusion (importantfor the finer resolution we are trying to achieve) thanthe schemes used in other nonhydrostatic models suchas the Terminal Area Simulation System (Proctor 1987).
We begin by decomposing the atmospheric pressureand density into a time-invariant hydrostatic base stateand a perturbation upon that state such that
p(x, y, z, t) 5 p (x, y, z) 1 p9(x, y, z, t), and (1)0
r(x, y, z, t) 5 r (x, y, z) 1 r9(x, y, z, t), with (2)0
]p0 (x, y, z) 5 2gr (x, y, z). (3)0]z
We then have the following equation set for the con-servation of mass, momentum, and energy.
Conservation of mass:
]r1 = · (rV) 5 F ,r]t
]rQn 1 = · (rQ V) 5 rM 1 F ,n n Qn]t
]rQ ]p 1 = · (rQ V) 5 rM 1 (Q W r) 1 F ,p p p p Qp]t ]z
and
]rQ ]a 1 = · (rQ V) 5 rM 1 (Q W r) 1 F , (4)a a a a Qa]t ]z
where the subscript a refers to aerosols or gases. In Eqs.(4), r represents the dry air density, calculated from thetotal density as
r 5 rtotal/(1 1 Qvapor). (5)
Conservation of momentum:
]rV1 = · (rVV) 5 2=p9 2 (r 2 r )gr0]t
2 2rV 3 V 1 F , (6)M
where the density used in the calculation of momentumis the total density.
Conservation of energy:
]E E1 = · (EV) 5 (L S ) 1 S 1 F . (7)O j j R h]t c T jp
Terms have been arranged such that the conservativeadvection terms appear on the left side of each equation.The source terms on the right side of the momentumequation also include buoyancy and gravitational ef-fects, 2(r 2 r0)gr (where r is the radial unit vector),
and the Coriolis force (22rV 3 V). Subgrid-scale tur-bulence contributions, F, are discussed in detail later inthis section. For the remaining equations; T is the tem-perature, Li and Si denote the latent heat and rate ofphase conversion of either vaporization, fusion, or sub-limation; and Wp represents the terminal velocity of eachof the precipitating water substances. In addition, Si de-pends on the microphysics that governs the rate of phasetransitions and Wa depends on the assumed size distri-bution and mass of the hydrometeors. Also, Mn and Mp
are the nonprecipitating and precipitating microphysicssource terms. Finally, subscript a refers to transport ofaerosol or gas.
The initial energy density E is calculated from thetotal pressure as
kpref12kE 5 p (8)1 2Rd
and throughout the simulation pressure is diagnosedfrom energy density using this relationship. Potentialtemperature, u, and temperature, T, are related by Pois-son’s equation,
kpT 5 u , (9)1 2pref
where pref 5 1000 mb, k 5 Rd/cp 5 0.286, Rd is thegas constant for dry air, and cp is the specific heat ofdry air at constant pressure. Finally, SR represents thecontribution of radiation flux to heating the atmosphere.
c. Hydrodynamic solver
The hydrodynamic elements of the OMEGA modelare based on numerical methods of solution of the Na-vier–Stokes equations on an unstructured grid in thehorizontal direction and a structured grid in the vertical.In the calculation of momentum, the pressure gradient,Coriolis, and buoyancy terms are calculated explicitlyalong with the advection terms. An implicit vertical filterand an explicit horizontal filter are applied to the verticalmomentum. The calculation of the new momentum ateach time step thus involves several steps, which aredescribed below. All implicit operations are performedby tridiagonal matrix inversion.
1) ADVECTION—IMPLEMENTATION OF THE FINITE
VOLUME UPWIND SOLVER
In this section we describe the implementation onunstructured grids of the multidimensional positive def-inite advection transport algorithm (MPDATA) origi-nally developed on regular grids by Smolarkiewicz(1984), Smolarkiewicz and Clark (1986), and Smolar-kiewicz and Grabowski (1990). The resulting schemeis second-order accurate in time and space, conserva-tive, combines the virtues of the MPDATA (e.g., abilityto separately ensure monotonicity and positive definite-

JULY 2000 2049B A C O N E T A L .
FIG. 3. Arrangement of the variables on a two-dimensional un-structured grid. The generic advected variable, C, is placed at cellcentroids. The subscripts L and R designates their left-hand-side andright-hand-side cell placements. The velocity is decomposed into nor-mal and parallel components (not to scale). The flux F is collocatedwith Vn at the face centers and points only in the normal direction.
ness) with the flexibility of unstructured grids (Baumand Lohner 1994), is compatible with adaptive meshalgorithms (Fritts 1988), and can run efficiently on high-ly parallel computers. Below, we describe the essentialmethodology and demonstrate the method on two-di-mensional passive advection test problems.
In discussing unstructured grids, it is necessary todefine the nomenclatures. To reiterate, the basic controlvolume element in our structured–unstructured com-putational domain is a truncated triangular prism. Eachprism is bounded by five faces. For advection acrosseach face, it is convenient to define a local coordinatesystem with its origin located at the center of the face.Each face separates the left-hand side (lhs) from theright-hand side (rhs) such that the flow from the lhs cellto the rhs cell is considered positive. For stability, theadvected variable, hereafter denoted as C, is placed atthe cell centroid, while the velocity vector is defined onthe cell face at the origin of the local coordinate system.Figure 3 shows the basic arrangement of the variableson a two-dimensional grid.
In its explicit form MPDATA adapts naturally to theabove construct. As posed by Smolarkiewicz, the al-gorithm can be generalized to the following steps.
1) At each cell face the low-order flux is found in con-servative form using the standard first-order-accurate‘‘upwind’’ scheme.
2) The advected variable is integrated using the low-order flux.
3) At each cell face, the low-order scheme is expandedin a Taylor series and the truncation error in the fluxis explicitly identified.
4) The error term is cast in the form of error velocity,Ve.
5) The correction velocity, Vc (52Ve), is optionallylimited to preserve monotonicity of the advected var-iable (Smolarkiewicz and Gradowski 1990).
6) Replacing V with Vc, steps 1 through 5 are repeateda chosen number of times (5Nc) to achieve greateraccuracy.
Although Smolarkiewicz derived Vc for a rectangulargrid, it can be generalized to a grid with arbitrary controlvolume shape as long as the bounding faces are flat.Consider the generic advection equation,
]C1 = · (VC) 5 0. (10)
]t
To compute the change in C from time t 5 t0 to t0 1Dt, it is necessary to integrate the flux CjV j througheach face j during the period Dt:
t5t 1Dt0
DC 5 C V · a dt. (11)j E j j j
t5t0
Here aj 5 ajen is the area vector of face j, where en
denotes the unit vector normal to the face and pointingfrom left to right. For this integral, second-order ac-curacy in space is achieved automatically by placing F5 C jVj at the center of each face (in practice, C j at thefaces is obtained by interpolation). Similarly, to ensuresecond-order accuracy in time, C jV j should be evalu-ated at t 5 t0 1 Dt/2. Assuming that a leapfrog algorithmis used (i.e., Vj is defined at t 5 t0 1 Dt/2), we needonly expand Cj in a Taylor’s series as
]C Dtj0C 5 C 1 1 O(2), (12)j j ]t 2
where the superscript 0 denotes an evaluation at t 5 t0.Substituting (12) for C j in (11) and performing the timeintegral, Eq. (11) becomes
]C Dtj0DC 5 C 1 V · a Dt. (13)j j j j5 6]t 2
Now substituting (10) for ]C/] t in (13) we have
Dt0DC 5 C 2 V · =C 1 (= · V )C V · a Dt.j j j j j j j j5 6[ ] 2
(14)
If we further let y n 5 Vj · en denote the componentof the velocity normal to the face (and thus Vn 5 y n en),then the first-order upwind flux term is given by
upwindDC 5 0.5{(V 1 |y |e )Cj n n n L
1 (V 2 |y |e )C } · a Dt. (15)n n n R j
Now letting dL denote the vector pointing from the cellcentroid on the left to the face, and dR the vector pointingfrom the face to the cell centroid on the right, we canwrite
CL 5 Cj 2 dL · =Cj and CR 5 Cj 1 dR · =Cj.(16)
Similarly, we will let
dCL 5 C j 2 CL and dCR 5 CR 2 C j. (17)
Now we can rewrite (15) as

2050 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
FIG. 4. Rotating cone advection test: (above) the computationalmesh used for the test and (below) the initial conditions.
FIG. 5. Rotating cone advection test after five rotations. (above)The results using a first-order ‘‘upwind’’ scheme; (below) the effectof adding a correction step.
upwind 0DC 5 {V C 2 0.5zy ze (d C 1 d C)} · a Dt.j n j n n L R j
(18)
The correction term is the difference between (14)and (18). After some algebraic manipulation, this cor-rection term can be written as
C 2 CR LDC 5 |y |c n5 1 2C 1 CR L
=C Dtj2 y V · 1 (= · V ) Ca Dt, (19)n j j j6[ ]C 2
where C 5 (CR 1 CL)/2. The correction velocity isnow
C 2 C =C DtR L jy 5 |y | 2 y V · 1 (= · V ) .c n n j j1 2 [ ]C 1 C C 2R L
(20)
In actual implementation, the correction term be-comes
˜ ˜C 2 CR LDC 5 |y |c n ˜ ˜5 1 2C 1 CR L
˜=C Dtj ˜2 y V · 1 = · V C a Dt, (21)n j j L,R j6˜[ ] 2C
where is the value of the advected quantity followingCthe first-order upwind advection step. We limit the num-ber of correction steps to Nc 5 1, since additional cor-rection steps are not cost effective. The effect of ad-ditional correction steps is to bring the solution closerto second-order accuracy, which is very nearly achievedwith just one correction step; the additional accuracyattainable is limited.
To compare with known results (Smolarkiewicz 1984;Smolarkiewicz and Clark 1986; Smolarkiewicz and Gra-bowski 1990), we performed the rotating cone test ontriangular grids. Figure 4 shows the mesh and the initialplacement of the passive scalar. Figure 5 shows the so-lutions after six revolutions of the cone. Figure 5a showsthe results of the first-order ‘‘upwind’’ scheme (Nc 50). As shown, the original cone shape has completelydiffused. In Fig. 5b, we show the case with one cor-rection step. This case has a background value of zero,which when coupled with the positive definiteness as-pect of the algorithm, generates extra numerical diffu-sion that automatically ensures monotonicity. Never-theless, the cone shape has been substantially preserved.We have also performed other standard tests such as themultiple vortex test suggested by Staniforth (1987). In

JULY 2000 2051B A C O N E T A L .
FIG. 6. Error scaling with grid resolution. Three measurements ofdeviation from the original cone are used: root-mean-square errorover the whole mesh (triangles), root-mean-square error over an areaextended by the original cone (diamonds), and deviation in the heightof the cone (squares).
general, all of our results are consistent with the pre-vious tests.
The claimed near-second-order accuracy of ourscheme is demonstrated by testing how the accumulatederror in the computation scales with grid size. Threemeasurements of error are used for the rotating conetest: the root-mean-square error over the whole mesh,the root-mean-square error over an area extended by theoriginal base of the cone, and deviation in the heightof the cone. The mesh sizes range from one-and-a-halfto one-half of those shown in Fig. 4, that is, a factor of3 variation. Figure 6 shows that except for the leftmostdata point, all three measurements of error scale ap-proximately as D2 (the dotted lines indicate the slopesof both D2 and D scaling for comparison). The leftmostdata points were generated from runs with the largestgrid size.
2) IMPLICIT ACOUSTIC DAMPING
One of the major goals of the OMEGA model de-velopment is to achieve a simulation capability that tran-scends scales through the use of variable resolution. Theaccurate portrayal of aerosols in the planetary boundarylayer will require fine resolution in the structured ver-tical direction and selective locations of fine horizontalresolution. Accurate, stable numerical solutions requirethat the time step of integration be determined by thefinest grid spacing. This problem is magnified whenusing the fully compressible set of nonhydrostatic equa-tions, since fast-moving sound waves are inherent in thesolution. Indeed, in the structured direction, the CFLtime step can become too restrictive. To overcome thisrestriction, the growth and propagation of acousticwaves are controlled through the application of vertical
and horizontal filters that act on the vertical componentof the momentum.
The momentum equation is integrated using a semi-implicit, fractional time step scheme. After explicit cal-culation of the advection and source terms, an implicitcalculation is performed in which a correction term isadded to the vertical component of momentum. Thisterm, which has the effect of slowing the growth andspeed of sound waves, is described below. The nextpartial step consists of the application of the filter de-scribed in the following section. Like the implicit cor-rection, this term is based on and added to the verticalmomentum. The implicit calculation of the eddy dif-fusion term completes the momentum advance to timestep n 1 1.
The first implicit calculation solves the followingequation for :ˆnw
2]ˆ ˆ ˆn n n n 2w 5 w 1 c y (w 2 w ) dt , (22)s s 2[ ]]z
where wn is the vertical component of momentum at thebeginning of the nth time step and wn is the value afterthe addition of the (explicitly calculated) terms repre-senting advection, the Coriolis force, the pressure gra-dient contribution, and the buoyancy effect. Here, y s isthe sound speed, and cs is an empirically chosen coef-ficient. A stability analysis of the above equation showsthat cs must be greater than 1.0. The default value cur-rently used in OMEGA is 2.5.
Eddy diffusion is also treated implicitly in the radialdirection. The fractional step approach is necessary be-cause the acoustic damping term described above ef-fectively increases the inertia at short wavelengths, thatis, reffective ; r(1 1 k2), where k is the wavenumber inthe direction of propagation. This can reduce the actionof the eddy diffusion term unless the operations are splitinto separate fractional steps.
Again, this implementation of the dispersion operatorremoves the severe time step restriction that can resultfrom diffusion flux along the finescale radial direction.A separate explicit treatment is used for momentumdiffusion in the horizontal direction.
3) ACOUSTIC FILTERING
The purpose of filtering in the OMEGA model is toremove from the solution a particular type of undesir-able feature: high-frequency oscillations in the pressurefield. Since these oscillations are reminiscent of the un-desirable oscillations occurring in spectral solutions, itis possible to borrow a filtering algorithm from spectralmethodology, in which filtering can be accomplished ineither physical or modal space. The filter applied inOMEGA is analogous to the Vandeven filter of orderthree when defined in physical space on a structuredgrid (cf., Karniadakis and Sherwin 1999). This filter,which is similar to a classical cosine filter, has the form

2052 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
FIG. 7. The ghost triangle used in the calculation of the Laplacian.
of a second-order artificial viscosity term when the gridspacing is uniform.
Since the OMEGA grid is structured in the verticaldirection, calculation of the vertical component of thefilter is straightforward, while the horizontal componentrequires special consideration. The horizontal term isbased on the horizontal component of the Laplacian,which is calculated using Green’s formula:
1 ]w2¹ w 5 , (23)RA ]n
where A is the area enclosed by a curve. The discretizedform becomes
31 ]w2¹ w 5 dL , (24)O iA ]ni51 i
where A is now the area of the triangle, ni is the outwardnormal vector to the ith edge, and dLi is the length ofthe ith edge. The normal derivative is defined as
]w w 2 wi c5 , (25)]n di i
where wi is the value of w at the centroid of the trianglethat shares the ith edge of the target triangle, wc is thevalue of w at the centroid of the target triangle, and di
is the distance between the two centroids.This approximation is first-order accurate only if the
line segment connecting the centroids is perpendicularto the shared edge; that is, this line segment coincideswith the outward normal vector. To improve the accu-racy of the approximation, we define a ‘‘ghost’’ trianglewhose edges are the perpendicular bisectors of the linesegments connecting the centroid of the target trianglewith the centroids of its neighbors. The area and edgelengths of this ghost triangle are used in the formula for¹2w. Figure 7 shows the ghost triangle constructedaround the centroid of the inner cell.
4) HORIZONTAL DIFFUSION
The horizontal diffusion term in the momentum equa-tion can be expanded as
= · (Kd=u) 5 =Kd · =u 1 Kd¹2u, (26)
where Kd is the horizontal diffusion coefficient, givenby
Kd 5 0.36DD2. (27)
Here D is the deformation rate, and D is the horizontalgrid spacing (McCorcle 1988). Assuming local defor-mation gradients are small, this can be written as
= · (Kd=u) ø Kd¹2u. (28)
We define orthonormal vectors x and y lying in aplane tangent to the surface of the earth at the centroidof the triangle in which the deformation rate is sought.Projecting the velocity u onto this local coordinate sys-tem gives u and y , the horizontal components of ve-locity. By assuming the velocity to be locally linear inx and y, it is possible to express u and y as aux 1 buy1 cu and ay x 1 by y 1 cy , respectively. For the hori-zontal deformation rate D we will use the approximation
]u ]yD 1 . (29)
]y ]x
Using the values of u and y at the vertices of thetriangle, it is then possible to solve for bu and ay , whichgives the local deformation rate as D 5 bu 1 ay . In thisway, actual horizontal deformation is obtained, as op-posed to deformation in the plane of the triangle. Sincethe horizontal grid spacing is squared in the expressionfor the deformation coefficient, we use the area of thetriangle. The Laplacian of each component of the ve-locity is calculated using the discretization of Green’sformula based on the ghost triangles described in theprevious section.
5) SUBCYCLING OVER SMALL CELLS
In OMEGA the integration time step depends on thelocal Courant number, which is a function of the velocity(advective or acoustic), and the dimension of the cell.The OMEGA user interface and grid generator allowthe user to specify selected regions in which the reso-lution can be as fine as 1 km or less. The cell size inthe outer portion of the domain may be nearly two ordersof magnitude greater than this. Hence the time step canrange from subsecond to tens of seconds depending onthe flow characteristics and dimension of the cell. Forthis reason, it is highly desirable to utilize a scheme inwhich the hydrodynamic solver is subcycled over smallcells, thus preventing the time step over the entire do-main from being limited to that required by the smallestcell.
In OMEGA, we use the term ‘‘inner mask’’ to referto a collection of cells over which the solution will be

JULY 2000 2053B A C O N E T A L .
subcycled. This terminology distinguishes such a col-lection of cells from a ‘‘subdomain,’’ which is user spec-ified as part of the grid definition process. An inner maskis selected by the model, which calculates the Courant-limited time step for each cell based on sound speedand uses this as the criterion for mask definition. Cellsin an inner mask need not be contiguous. We imposeonly the restriction that any cell having two neighborsin an inner mask is added to the inner mask. For stability,no more than two time steps are taken in a cell beforethe neighboring cell is updated; however, masks can benested, so that the time step in the outermost portion ofthe domain can be four or more times that of the smallestcells.
The difficulty in implementing a time-splittingscheme consists in the treatment of the mask boundaries.In OMEGA, the edges of cells in an inner mask belongto the mask. Thus advection across those edges takesplace at the smaller time step associated with the innermask. Advected quantities are updated in cells withinthe inner mask, while quantities advected into or out ofcells having only one edge on the inner mask are stored.Advected quantities in these bounding cells are updatedsimultaneously with advection across edges in the outermask.
To test the time-split advection scheme, we used atest grid composed of a large domain with two levelsof nesting. We performed the canonical ‘‘rotating cone’’test, defining the initial conditions and the flow field insuch a way as to cause the cone to pass directly throughthe high-resolution subdomain. The model took twotime steps in the moderate-resolution area and four inthe high-resolution area for each time step taken in thebase-resolution area. There was no resultant deforma-tion of the cone or degradation of the solution.
d. Model physics
This section briefly discusses the OMEGA modelphysics including atmospheric turbulence, cloud micro-physics, convective parameterization, and radiationtransport. Atmospheric turbulence affects, among otherthings, the rate at which surface moisture and energyenters the atmosphere. Cloud microphysics and con-vective parameterization are important in the verticaldistribution of this moisture and energy and in the for-mation of precipitation. And finally, radiation transportis important in determining the solar heating of theearth’s surface and the atmosphere.
1) TURBULENCE AND THE PLANETARY BOUNDARY
LAYER
The parameterization of turbulence in OMEGA [i.e.,the forcing terms, F, in Eqs. (4), (6), and (7)] is dividedinto two parts: horizontal and vertical. The horizontaldiffusion is a function of the deformation of momentum(discussed in the previous section), while the vertical
diffusion is implemented using a multilevel planetaryboundary layer model. The atmospheric boundary layerin OMEGA is treated separately as the viscous sublayer,the surface layer, and the transition layer.
The viscous sublayer is defined as the level near theground (z , z0, z0 is the surface roughness) where thetransfer of the dependent variables by molecular motionbecomes important. Temperature and specific humidityin this layer are related to their ground surface values(Deardorff 1974). The surface layer is that part of theplanetary boundary layer immediately above the viscoussublayer where small-scale turbulence dominates thetransfer of energy, moisture, and momentum, and thevertical variation of the vertical fluxes is roughly lessthan 10%. In this layer, Monin–Obukhov similarity the-ory provides an acceptable framework for the interac-tion between the atmosphere and the underlying surfaceand virtually all numerical models make use of it oneway or the other. In the OMEGA model, the revisedformulas purposed by Beljaars and Holtslag (1991) areused. Finally, the vertical turbulent exchange above thesurface layer is parameterized using the so-called level2.5 closure technique developed by Mellor and Yamada(1974). This scheme (Mellor and Yamada 1982) hasbeen selected from the hierarchy of available closureschemes, because it is a good compromise between ac-curacy and efficiency, and because it has been appliedto many atmospheric modeling studies. The level 2.5turbulence closure is based on the following prognosticequation for the turbulent kinetic energy, e:
](re)5 2= · (rev) 1 = · (K = re)r e r]t
]u ]y g1 2u9w9 2 y9w9 1 w9u9 2 «. (30)[ ]]z ]z u
The OMEGA model requires as boundary conditionsthe temperature and humidity at the roughness level.These must be calculated prognostically taking the in-teraction of the atmosphere and the land surface intoaccount. Numerical studies have demonstrated that con-trasts in land surface characteristics (e.g., soil textureand moisture, vegetation type) can generate local cir-culations as strong as sea breezes (McCorcle 1988;Chang and Wetzel 1991). In consequence, landscapevariations strongly influence atmospheric dispersionpatterns. The land surface module implemented in theOMEGA model is based on the scheme proposed byNoilhan and Planton (1989) and uses worldwide datasetsfor soil type, land use/land cover, vegetation index, cli-matological sea surface temperature, climatological sub-surface temperature, and climatological soil moisture(discussed in section 5). These surface characteristicsare used as primary parameters, while the spatial var-iation of secondary parameters such as surface rough-ness, albedo, thermal diffussivity of the soil, etc. arespecified based on the primary parameters.

2054 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
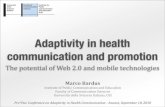
FIG. 8. OMEGA microphysical processes.
Finally, the surface of water bodies such as lakes andoceans is represented in the OMEGA model rather sim-ply. Because of the large heat capacity of water andstrong surface mixing, the surface temperature of waterbodies, Tsea, is initially specified based climatologicaldata and then assumed to be constant during the periodof the mesoscale simulation. The air just above the watersurface is assumed to be fully saturated by water vapor.The spatial variation of surface roughness length, z0, isdetermined using the Charnock’s relationship (Charnock1955) over the water surface.
2) MICROPHYSICS
The OMEGA microphysics package falls under thecategory of bulk water microphysics in which the pro-duction rates are functions of the total mass density ofeach water species (Lin et al. 1983). The water speciesin OMEGA are divided into vapor, cloud droplets, icecrystals, rain and snow fields; however liquid and solidphases of water are not allowed to coexist. This impliesthat neither supercooled liquid nor melting solids (suchas wet hailstones) can exist in the model domain. Be-cause of this simplification, the number of microphys-ical processes to be dealt with is much smaller than thatin many cloud models (Klemp and Wilhelmson 1978;Proctor 1987). Though liquid and solid phases of waterare not allowed to coexist in OMEGA, OMEGA hasseparate array spaces allocated for all the different mi-crophysical species. This will facilitate the addition ofthe physics dealing with melting hail and snow andsupercooling of liquid droplets at a later date. The mi-crophysical processes included in OMEGA (Fig. 8) arecondensation (or evaporation) of cloud water, autocon-version of cloud water to rain, condensation on (or evap-oration of ) raindrops, accretion of cloud water by rain-drops, fallout of rain, and generation of ice crystals fromice nuclei, deposition (sublimation) ice crystal growth,
autoconversion of ice crystals to snow, deposition on(or sublimation of ) snow, accretion of ice crystals bysnow, and finally fallout of snow.
3) CONVECTIVE PARAMETERIZATION
While the goal of OMEGA is to try to explicitlyresolve large areas of convection, there will always beregions that are not sufficiently resolved. To circumventthis problem a version of cumulus parameterization thatwas originally proposed by Kuo (1965, 1974) and latermodified by Anthes (1977) is incorporated to accountfor the effect of subgrid-scale deep cumulus convectionon the local environment. The coupling between thesubgrid-scale cumulus parameterization scheme and theexplicit cloud microphysics is still a great research areafor numerical modelers. More recently, Molinari andDudek (1986) proposed that the use of explicit cumulusphysics representations becomes necessary for horizon-tal grid resolutions less than 3 km. At this scale, largedeep convective clouds are often resolvable (e.g., Lilly1990). For horizontal grid scales larger than 50–60 km,Molinari and Dudek suggested using cumulus param-eterizations of convectively unstable grid points and ex-plicit condensation at convectively stable grid points.The most troublesome scales for parameterizing con-vective processes are those between 3 and 50 km.
Since OMEGA uses an unstructured grid, this scalespanning problem becomes an important issue. In OME-GA, the convective parameterization only applies tothose regions that are convectively unstable to deep pen-etrative convection and in which the total horizontalmoisture convergence exceeds a critical value. As thecumulus parameterization is a mechanism to account forsubgrid convection in large cells, in OMEGA we alsoare using a simple concept by which we can smoothlytransition from regions where no convective parame-terization is applied to regions where it is applied. Thisis achieved by including a factor in the cumulus ad-justment scheme that varies between 0 and 1 dependingon cell area, while explicit cloud microphysics is activeover the whole domain.
4) RADIATION
Because of the divergent behavior of different partsof the atmospheric radiation spectra, it is convenient todevelop separate parameterizations for long and shortwavelengths. The radiative source–sink term in the con-servation of energy relation [Eq. (7)] can then be writtenas
]T ]TS 5 1 , (31)R 1 2 1 2]t ]t
LW SW
where the terms on the right-hand side represent thetemperature change resulting from longwave and short-wave radiative divergence flux in the vertical direction.

JULY 2000 2055B A C O N E T A L .
The divergence of radiative energy in the horizontaldirection is neglected, since its variation is much largerin the vertical direction on the mesoscale. The methodof parameterizing this vertical flux takes into accountthe absorption of shortwave radiation by water vaporand the longwave energy emitted by water vapor andcarbon dioxide using the computationally efficient tech-nique of Sasamori (1972). It is essentially similar to theone used by Mahrer and Pielke (1977).
e. Model initial conditions
The function of the OMEGA data preprocessor is toconvert a diverse mixture of real-time atmospheric andsurface data for input into an OMEGA simulation. Theprocess produces two datasets. One dataset specifies theinitial values of all the model’s dependent variables aswell as the surface-based model parameters. A seconddataset consists of the time-dependent behavior of allof the model’s dependent variables along the lateralboundaries of the simulation domain. The OMEGA pre-processor can ingest real-time atmospheric data fromNCEP and FNMOC. The core of the OMEGA analysisand initialization procedure consists of seven steps: 1)ingestion of the available data prepared by the PREP-DAT module and the preliminary INIT file created bythe GENINIT module, 2) objective analysis of sea sur-face temperature data, 3) processing and quality controlof surface and upper air data, 4) objective analysis ofsurface and upper air data, 5) adjustments to ensure thatthe analyzed data meet desired constraints, 6) generationof objective analysis performance statistics, and 7) out-put of the initialization data to a modified INIT file.
The multivariate algorithm in the OMEGA data pre-processor is based on that described by DiMego (1988),which adapts in a natural way to the unstructured grid.The analysis proceeds horizontally layer by layer, cellby cell. The analysis is performed at the top center ofeach OMEGA grid cell as well as at the bottom of thelowest layer of cells. Corrections to the first-guess fieldfor height and wind are computed using the multivariatealgorithm while those for relative humidity are com-puted using the simpler univariate algorithm. Correc-tions are computed for an entire layer and smoothedwith a four-point smoother before being added to thefirst guess. The smoother sets the value at a given cellto 50% of the original value plus 1/6 the value at eachof the three adjacent cells. The height corrections areconverted to pressure corrections since OMEGA definesgrid locations by absolute altitude. The variables arethen vertically interpolated to cell centroids. Tempera-ture is analyzed only at the surface. At cell centroids,it is derived hydrostatically from the pressure at the topand bottom of the cell. If a level is less than 10 mb fromthe last analyzed level, the analysis at this level isskipped. The corrections to the first guess are then in-terpolated from the corrections at the nearest analyzedlayers above and below. This reduces the problem of
noisy temperature fields due to small differences in theheight correction at closely spaced analysis layers.
The surface temperature data are used to hydrostat-ically adjust the surface height increment in the lowestlevels as in DiMego (1988). At the ground, the surfaceheight increment will be used directly. In the first fewmodel levels above the ground (up to about 40 mb abovethe surface), the surface height increment is hydrostat-ically corrected by assuming that the surface tempera-ture perturbation is valid over this layer. The correctedheight increment is considered to be valid at the modellevel. In effect, a minisounding is created from eachsurface observation. The profile extends about 40 mbabove the ground. Only the nearest height increment toa given level is included in the analysis matrix at anygiven grid point. This has the effect of influencing thethickness field near the ground so that the hydrostati-cally derived temperature field closely resembles a di-rect surface temperature analysis.
The final process in the preparation of the initiali-zation file is the adjustment of the vertical temperatureprofile. Since height rather than temperature is analyzedby the 3D OI scheme, temperature profiles will some-times include regions of superadiabatic lapse rates ortemperature spikes. This is particularly true near thesurface where closely spaced analysis layers mean thata small error in the height analysis at one level canproduce large temperature anomalies in the layers aboveand below. Spikes are removed, one at a time, startingwith the most significant spike. The spike is removedby adjusting the height of the layer interface lying be-tween the grid point that contains the spike and theadjacent grid point that most resembles a spike of theopposite sign. This method is based on the assumptionthat a small error in the height analysis at one layerinterface relative to the interfaces above and below willintroduce a warm–cold dipole in the temperature fieldat the layers immediately above and below. Once allsignificant spikes are removed, superadiabatic layers areremoved in a similar manner. Often, the removal oftemperature spikes also removes superadiabatic layersso that this final step is not needed. The adjustment ofthe intermediate height is done so that temperature lapserate between the grid points above and below is set tothe mean lapse rate of a layer extending one level aboveand below any contiguous layers containing a spike orsuperadiabatic lapse rate.
f. Model boundary conditions
In cloud-scale models, in which the timescale is smallenough to assume that the environment outside the mod-el domain is unchanged during the simulation, inflowboundaries are usually prescribed from environmentalconditions. In mesoscale and larger-scale models thisassumption can no longer be made. The environmentoutside the computational domain has to be derivedfrom larger-scale forecast tools such as the Nested Grid

2056 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
Model, the Eta Model, or the Medium Range Forecastmodel run at NCEP, or the Navy Operational GlobalAtmospheric Prediction System (NOGAPS) run at theNavy Fleet Numerical Meteorology and OceanographyCenter. Boundary conditions at user-specified time in-tervals are calculated based on one of these forecasts,and linear interpolation is used to determine boundaryvalues at intermediate times.
The lateral boundaries are open and should allow theunimpeded flow of air. At outflow boundaries interiorvalues rather than forecast data are used in the calcu-lation of the fluxes across the boundary faces. To allowthe propagation of acoustic disturbances across theboundaries, we use a radiative boundary condition witha uniform phase speed on outflow boundaries. At theend of each time step, a ‘‘nudging’’ scheme is appliedto the new values of all variables, which nudges valuesin cells immediately inside the boundary to the forecastvalues in the ghost cells across the boundary. At inflowboundaries forecast data are used to calculate both thevelocity normal to each boundary face and the fluxesacross the face.
At the top of the computational domain, initial valuesof density and potential temperature are calculated as-suming a hydrostatic balance, and these values remainfixed throughout the simulation. A homogeneous Neu-mann boundary condition is applied to the horizontalcomponents of momentum, while the vertical momen-tum is assumed to be zero. Thus the upper boundary isa rigid, free-slip surface. To minimize reflection off ofthis boundary, a diffusive ‘‘sponge’’ is applied to thevertical component of the momentum. The coefficientof the sponge is exponential and, thus, approaches zerorapidly below the top few layers of the grid.
The surface boundary conditions applied in the OME-GA model are formulated with the aid of Monin–Obu-khov similarity theory. This theory allows one to de-termine the values of the model’s prognostic variablesat a diagnostic level between the first and second com-putational levels.
At the ground surface, a no-slip condition is imposed.The hydrostatic equation is used to obtain the surfacepressure from level 2 (the lowest atmospheric layer inthe model), while the surface density, r, is computedfrom the known surface pressure and ground surfacetemperature using the ideal gas law. For all Euleriantracers (Qt) and for the turbulent kinetic energy, a zeroflux boundary condition is assumed at the ground.
3. Atmospheric Dispersion Model
Atmospheric dispersion over mesoscale travel timesand distances involves virtually every atmospheric dy-namical process operating on scales larger than molec-ular dissipation and smaller than the latitudinal variationof the Coriolis.
For example, thermal and mechanical forcing due tomesoscale terrain inhomogeneities can generate exter-
nally forced mesoscale flow inhomogeneities such asupslope precipitation events, lee cyclogenesis, drylines,land and sea breezes, mountain-valley winds, and urbanheat island circulations. Moist processes can generatemesoscale convective systems such as cumulus-scaleconvection, extratropical squall lines, mesoscale con-vective complexes, mesoscale cellular convection, trop-ical cyclones, mesoscale rainbands, tornadoes, and tor-nadogenesis. The atmospheric inertial mode can gen-erate internally generated circulations such as fronts andjet streaks, buoyant instability, synoptic instability,Kelvin–Helmholtz instability waves, quasi-stationaryconvective events, and mesoscale structure of hurri-canes. This wide range of mesoscale circulations andtheir associated mesoscale vertical ascents and descentscan have a significant impact on the dispersion of pol-lutants.
In addition, the presence of wind shear, mainly causedby surface friction and large-scale baroclinicity, furthercomplicates the flow dynamics and the dispersion ofpollutants over mesoscale travel times and distances byaffecting the local structure and dynamics of the plan-etary boundary layer. Many flow instabilities occur part-ly as a result of the presence of wind shear, which mayenhance turbulent diffusion by increasing turbulence in-tensities. Also, synoptic-scale wave–wave interactionsmay produce higher wavenumber circulations or flowfeatures. Latitude affects both the inertial period anddiurnal forcing. Time of day affects the dynamics of theboundary layer, while time of year affects the diurnalforcing.
In summary, mesoscale energy is distributed over avariety of flow modes, including mean mesoscale cir-culations, mesoscale eddies, and internal gravity waves.Flow dynamics are also quite variable and complex onthis scale. Mesoscale flows may be hydrostatic or non-hydrostatic. Nonhydrostatic motions may contain sig-nificant features on scales ranging from several metersto several tens of kilometers with timescales of minutesto many hours. Hydrostatic motions, in which the non-hydrostatic motions are embedded, have motion scaleswith orders of magnitude larger than the nonhydrostaticmotions. Therefore, mesoscale atmospheric flows pos-sess various mesoscale time and space scales. Even forhorizontally homogeneous flows over flat and uniformterrain, mesoscale frequencies such as the diurnal heat-ing cycle and formation of a nocturnal low-level jet willusually be present. The transport and diffusion of at-mospheric pollutants can be affected by this wide rangeof flow scales through variations in the mean transportwind, differential advection due to vertical and hori-zontal wind shear, and vertical mixing (cf. Moran 1992).Therefore, these mesoscale space–time flow scalesshould be represented accurately when the mesoscaledispersion processes are studied. Otherwise, significantcomponents of mesoscale transport and diffusion maybe neglected.
ADM is embedded within the OMEGA model. There-

JULY 2000 2057B A C O N E T A L .
fore, the ADM model has the benefit of using the OME-GA model-predicted meteorological fields (such asmean wind components and atmospheric turbulence in-formation) at the OMEGA model’s spatial and temporalresolution. The ADM model is composed of an Eulerianmodel, a Lagrangian particle dispersion model, and aprobabilistic Lagrangian puff model. Since each mod-eling technique has its own advantages and disadvan-tages, we have decided to implement the above threedispersion models in the OMEGA model. In principal,these dispersion models advect massless tracers and gas-es and/or solid and liquid particles using the OMEGA-resolved wind field, while simultaneously solving a dif-fusion model that simulates the effect of unresolvedphysics including turbulence. Massless tracers and gasesare in thermodynamic and dynamic equilibrium with theambient atmosphere whereas solid and liquid particlesare allowed to settle out with a size- and density-de-pendent vertical slip velocity due to gravity (Bacon andSarma 1991):
330m D gr ra pV 5 21 1 1 1 (32)t 21 21 2!r D 405ma
where m is the dynamic viscosity of air, ra is the ambientair density, rp is the particle density, D is the particlediameter, and g is the acceleration due to gravity. Thefeatures of these dispersion models and their basic ad-vantages and disadvantages briefly will be discussed inthe following sections.
a. Eulerian dispersion model
The Eulerian dispersion model embedded within theOMEGA model assumes that the released gas instan-taneously and uniformly fills the OMEGA cell contain-ing the source. The Eulerian tracers are also currentlyassumed to be massless and hence are advected by themean wind and diffused by its turbulence components.The conservation equation for the tracer field can thenbe written as
]x1 = · (xV) 5 F 1 S , (33)x x]t
where x is the tracer concentration, Fx represents sub-grid-scale turbulent transport, and Sx represents the trac-er sources/sinks. Sources and sinks (Sx) are specifiedvia their source strength, latitude, longitude, and altitudelocations.
In general, Eulerian models are well suited to handlecomplicated physical processes such as reactive nonlin-ear chemistry and wet deposition. These models are alsowell suited to handle a large number of geographicallyfixed sources, since their gridpoint calculations are in-dependent of the number of sources. However, Eulerianmodels suffer from several limitations. First, the treat-ment of advection in Eulerian models usually introducesartificial numerical diffusion and sometimes spurious
oscillatory behavior, a problem when advecting non-negative physical quantities such as concentrations. Sec-ond, use of the gradient-transfer hypothesis limits thesemodels to timescales much larger than the turbulenceintegral timescale and to pollutant spatial scales muchlarger than the turbulence integral spatial scales. Third,the pollutant mass being modeled must have a spatialextent at least equal to four or more horizontal andvertical grid increments in order for the gradients to beadequately defined and the advection phase errors min-imized. Finally, these characteristics make point and linesources particularly difficult to treat in Eulerian models.
b. Lagrangian particle dispersion model
The Lagrangian particle dispersion model imple-mented in the OMEGA model applies the Monte Carlotechnique to simulate dispersion of nonbuoyant and dy-namically passive pollutants released from multipleemission sources with different geometry and releaseduration. The model can be used for a computer visu-alization of the OMEGA flow field in complex terrainwith the aid of particle distributions and trajectories.The Lagrangian particle dispersion model basically sim-ulates the dispersion of pollutants by tracking a largeset of Lagrangian particles moving, at each time step,with pseudovelocities. These pseudovelocities simulatethe effects of the two basic dispersion components: 1)transport due to the mean wind, and 2) diffusion due toturbulent velocity fluctuations (Boybeyi et al. 1995). Inaddition, particle velocity is adjusted so that particlesare allowed to fall out with a vertical slip velocity dueto gravity. Subsequent positions of each particle (x, y, z)representing a discrete element of pollutant mass arecomputed from the following:
x(t 1 Dt) 5 x(t) 1 [u(t) 1 u9(t)]Dt, (34)
y(t 1 Dt) 5 y(t) 1 [y (t) 1 y9(t)]Dt, and (35)
z(t 1 Dt) 5 z(t) 1 [w(t) 1 w9(t)]Dt, (36)
where u , y , and w are the resolvable-scale componentsof wind velocity obtained directly from the OMEGAmodel, and u9, y9, and w9 are the corresponding subgrid-scale turbulent velocity fluctuations whose statistics arederived from the boundary layer formulations used inthe OMEGA model.
An important advantage of turbulent kinetic energyclosure implemented in the OMEGA model is that itallows one to determine a variety of turbulent variablesincluding the Lagrangian turbulent statistics. The La-grangian turbulent statistics necessary to run the La-grangian particle dispersion model are obtained fromthe level 2.5 Mellor and Yamada scheme (cf. Uliasz1990).
Lagrangian particle dispersion models have a numberof advantages over other simulation techniques. First,Lagrangian particle dispersion models combine all un-certainties into the correct determination of the pseu-

2058 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
dovelocities. Second, a Lagrangian framework is morenatural for modeling turbulent diffusion, which is a La-grangian phenomenon. Third, Lagrangian particle mod-els do not suffer from computational phase dispersionbecause no advection terms need to be considered inthe mass conservation equations. Fourth, diffusion oversmall space and time scales, including emissions frommultiple-point pollutant sources, can be treated easilyby these models. Fifth, Lagrangian particle models areusually able to incorporate more turbulence propertiesthan other simulation techniques due to their ability toincorporate random turbulent components. Finally, La-grangian particle dispersion models are flexible, con-ceptually simple, and computationally inexpensivewhen a reasonable number of particles are used. In prin-ciple, Lagrangian particle dispersion models can providea degree of resolution and accuracy to complex flowsolutions not obtainable by other simulation techniques,if the mean flow, Lagrangian timescales, and turbulentstatistics are provided. However, they are not well suitedfor modeling the dispersion of nonlinear reacting pol-lutants and the question of statistical sampling errormust be addressed when estimating pollutant concen-trations in areas of low particle density, sometimes re-quiring the release of a very large number of particles.
c. Probabilistic puff model
The simpler version of the Lagrangian particle dis-persion model allows us to track the motion of puffswith a Gaussian distribution of pollutant mass. Contin-uous plumes are commonly represented by subdividingthem into discrete, overlapping puffs. Puff models areconceptually simple and this simplicity usually trans-lates into relatively straightforward solutions to themathematical and computer programming requirements.
The probabilistic puff model implemented in theOMEGA model generates a new group of Lagrangianpuffs (N) at a user’s defined time interval (Dt). Thenumber of puffs released depends on local wind speedand turbulent diffusion at the source. Here N is chosenin such a way that the distance between two puffs shouldbe approximately equal to half of the horizontal standarddeviation, sh. Each puff generated represents a discreteelement of the total material released into the atmo-sphere.
The puffs are moved using the OMEGA model meanwind field only. Locations of each puff center are de-scribed by Eqs. (34)–(36) where turbulent componentsare omitted. Puff diffusion, the distribution of materialwithin each puff (around the puff centroid) in spaceaccording to a Gaussian function whose sx, sy, and sz
values increase with travel time or distance, is estimatedbased on Taylor’s homogeneous diffusion theory. It isassumed that the theory is applicable over short time-scales (cf. Uliasz 1990 or Arya, 1999), such as the timestep, Dt, used to transport puffs in OMEGA:
us (t 1 Dt) 5 s (t) 1 s Dt for t # 2T andx x u L
2 2 u 2 us (t 1 Dt) 5 s (t) 1 2T s Dt for t . 2T ,x x L u L (37)
where su is the variance of wind velocity componentand is the Lagrangian integral timescale. These tur-uT L
bulence characteristics are obtained from the turbulenceclosure scheme used in the OMEGA model. In a similarway sy and sz are determined (Uliasz 1990).
As the puff grows, the local representation of theturbulence and velocity fields using puff centroid lo-cation becomes increasingly inaccurate. When the me-teorological fields are inhomogeneous, the accuracy ofthe calculation can only be maintained by splitting puffsinto smaller components that can sample the variationsin the meteorology explicitly. A puff splitting schemeis implemented in such a way that when the growth ofa puff extends either vertically or horizontally over onecell area of the OMEGA model grid, then the puff isdivided into two or more puffs such that the sum oftheir masses equals the mass of the initial puff.
The key element to the practical application is theelimination of duplicate puffs. The generation of newpuffs, especially due to vertical diffusion, can quicklyoverwhelm even the fastest and largest computers. Forthis reason, overlapping puffs with Gaussian concen-tration distributions are merged when they are separatedby about sh or less. This reduces the number of puffsused in the probabilistic puff model. Every 10 min alladjacent puffs are checked to see if the puff centroidsare within sh of each other. If so, the material from bothis merged into a single puff. The centroid of the mergedpuff is assigned new coordinates and sh values that areaverages of those in the original puffs. Puffs are alsoremoved from further consideration when the puff cen-troid point is outside of the modeling domain. This ap-proach should cause no problems within the area ofinterest, except when a wind reversal brings puffs backinto the modeling domain.
The concentration within each puff is distributed inspace according to a Gaussian function whose sx, sy,and sz values increase with travel time or distance.Knowledge of puff location, the material in it, and itsgeometrical dimensions allows concentration to be de-termined anywhere by summing contributions from eachpuff. Local concentration values are receptor orientedand based on summing contributions from each puffusing generalized Gaussian distribution (Sykes et al.1986).
Observations have shown that concentration fluctu-ations are sometimes at least as large as the mean. There-fore, there is a growing need for methods of predictingfluctuations of concentration. For example, some acci-dentally released gases are toxic and their flammabilityis determined by short-term concentration levels [e.g.,the accidental release of MIC gas at Bhopal (Boybeyiet al. 1995)]. In this emergency case, the prediction ofconcentration fluctuations is crucial. On the other hand,

JULY 2000 2059B A C O N E T A L .
the magnitude of turbulent fluctuations of concentrationdetermines the uncertainty in air quality models. Un-certainty calculation is also important in most of emer-gency hazard predictions. Wilson et al. (1982a,b) wereconcerned with simulating concentration fluctuationsfrom a continuous source observed in a wind tunnel andproposed a simplified empirical model based on the stan-dard Gaussian formula. This formulation for the con-centration fluctuation calculation is used in the OMEGAprobabilistic puff model.
Puff models are conceptually simple, and computa-tionally inexpensive. These models are also used widelyin atmospheric dispersion studies. However, puff modelsusually ignore entrainment, cloud venting, and othermixing effects with the ambient environment, and theycannot accommodate nonlinear chemistry. Finally, treat-ment of multiple pollutant sources in puff models mayquickly become very complicated.
4. The OMEGA grid adaptivity
Since the accurate solution of any complex compu-tational problem depends on fine spatial discretizationof the computational domain, the accurate representa-tion of multiscale events in numerical models has longbeen a principal issue in computational fluid dynamics.For example, one typically desires to capture not onlythe development and evolution of small-scale featuresbut also their interaction with and influence upon thelarger-scale flow. This is a particularly important re-quirement in atmospheric models, because numerousevents such as fronts, clouds, and plumes are not onlyrelatively localized with respect to their environment,but are also forced on scales larger than their own. Be-cause practical limitations in computer size and speedprohibit the use of uniformly high spatial resolutionappropriate for the smallest scales of interest, numeroustechniques have been developed to deal with multiscaleflows.
Grid nesting techniques involve the sequential place-ment of multiple finer-scale meshes in desired regionsof the domain so as to provide increased spatial reso-lution locally. Although the decision to spawn one ormore submeshes is typically subjective and manuallydirected, many formulations allow the submeshes tomove with particular features in the flow, such as hur-ricanes (Jones 1977). A principal limitation of the gridnesting technique is that one must know a priori, andfor the duration of the calculation, which regions of thedomain will require high spatial resolution. In otherwords, the trajectory of the moving grid has to be pre-defined and therefore cannot be used for prediction.
Another principal limitation of grid nesting techniqueis the interaction among multiple nested meshes, par-ticularly the tendency for propagating dispersive wavesto discontinuously change their speeds upon passingfrom one mesh to the next and to reflect off the bound-aries of each nest due to an impedance mismatch across
the mesh boundaries (Zhang et al. 1986). Without thesharp internal boundaries of a nested grid, this numericaldifficulty is missing in unstructured grids.
Grid refinement techniques are a relatively new andpowerful class of methods and can be subdivided intotwo basic categories. The first includes methods inwhich grid points are added locally to the computationaldomain as the calculation proceeds, or finite elementsare subdivided locally, to provide increased spatial res-olution based on predetermined physical criteria. Thisgrid refinement technique has been widely used in aero-space applications with successful results. For example,Lottati and Eidelman (1994), Baum and Lohner (1994),and Baum et al. (1993) have applied this dynamic gridgeneration for simulating flows over aircrafts, trackingshock waves, and in simulating fluid–structure inter-actions. The second category of refinement techniqueinvolves methods that redistribute, in some predeter-mined manner, a fixed number of grid points so as toprovide locally increased resolution and thus an im-proved solution in certain regions of the domain. Forexample, Dietachmayer and Droegemeier (1992) andFiedler et al. (1998) have used this method for atmo-spheric flows using structured grids. However, theirmethodologies have been restricted to idealized prob-lems so far and are not suitable for real atmosphericflow simulations, which can include complicated terrainfeatures. Structured grids also are not suitable for dy-namic grid adaptation, because the grid generation re-quires a high degree of user interaction and user ex-pertise. It is not realistic to use manual grid-generationcode for real-time predictions.
The unstructured grid technique is rather new to theatmospheric science community. In many fields of en-gineering applications, the unstructured grid method hasbeen in use for more than a decade due to its efficiencyin the modeling of irregular domains (cf. the above ref-erences). The flexibility of unstructured grids and theirability to adapt to transient physical phenomena are thefeatures that give unstructured grid algorithms for partialdifferential equations their great power. Grid adaptivityimproves the fidelity of all finite-difference or finite-element numerical schemes, by increasing resolution inregions of high gradient. The improvement comes fromthe ability to adapt the grid structure to the flow, andfrom the local refinement of the grid in the vicinity ofrapidly changing horizontal spatial structures in the at-mosphere.
Using unstructured grids also eliminates the disad-vantages of nested grid technique. The main advantageof unstructured grids is the ease with which dynamicsolution adaptation can be implemented. There is nolonger a need for involved user expertise/interaction forcreating topologies of complicated terrain features; thewhole procedure can be fully automated. Automationof the process is not only highly desirable, but can alsobe required in operational settings. Also, since the un-structured grid is a single mesh with a smooth and con-

2060 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
FIG. 9. Vertex addition and reconnection. FIG. 10. Vertex deletion and reconnection.
FIG. 11. Vertex relaxation and edge bifurcation.
tinuous transition from coarse to fine regions within thewhole domain, the model is naturally two-way scaleinteractive without the interpolation error caused by thetransfer of information from one nest to another.
To the best of our knowledge, OMEGA is the onlyoperational atmospheric flow model based on an un-structured grid technique, which fully exploits the ad-vantages and flexibility of unstructured grids. It canadapt its grid both statically and dynamically to differentcriteria. For real-time flow predictions, the capability ofgrid adaptivity, given the CPU constraint, becomes im-portant. This capability is also crucial in responding toemergency scenarios such as release of hazardous ma-terials. OMEGA with its grid adaptation capability hasa unique advantage over other atmospheric flow modelsin providing accurate solutions quickly in an operationalsetting. The grid adaptivity in the OMEGA model takesplace in two different ways: 1) static grid adaptivity,and 2) dynamic grid adaptivity.
a. Static grid adaptivity
The total number of grid points necessary to performa successful numerical computation that recovers thecorrect physics can be greatly reduced in an unstructuredgrid. By this we mean that the recovery of the modelphysics at the smallest length scale resolved does notrequire the complete domain to have the same resolu-tion. The resources of the numerical and computationalmachinery are focused on the regions of importance.This is especially significant for three-dimensional hy-drodynamic problems, where our experience has shownthe resulting economy can make the difference betweentractability and intractability (cf., Baum et al. 1993).
In OMEGA, the adaptation of the unstructured gridtakes place through a variety of grid operations (Figs.9–11). The first is vertex addition, which is followedby vertex reconnection. Figure 9 illustrates these twosteps when some activity that would indicate a need formore resolution is noted in two cells. The vertex ad-dition step is accomplished by adding a vertex at thecentroid of each affected cell and connecting it to thevertices of the cell. The reconnection step then involvesthe evaluation of each new cell to see if it is possibleto create grid cells with lower aspect ratios by removingan edge and reconnecting the vertices.
Figure 10 shows the reverse process, in which thegrid is coarsened through the process of vertex deletion.Like vertex addition, vertex deletion is followed by avertex reconnection step. It is important to note that thegoal of grid adaptation is not to move the grid, but ratherto refine the grid in advance of any important physicalprocess that might require additional grid resolution, andto coarsen the grid behind the region. This differentiatesthe method from the adaptation techniques described byDietachmeyer and Drogemeier (1992), which used ver-tex movement to adapt to atmospheric features.
A different type of grid modification is also shownin Fig. 11. In this figure we show vertex relaxation, inwhich the vertices are allowed to move as a mass-springsystem, and edge bifurcation, which is equivalent tovertex addition in the special case of an edge cell. Vertexrelaxation is used to keep the aspect ratio as near unityas possible to minimize numerical errors in computinggradients.
The OMEGA grid in the ‘‘static’’ adaptation case isadapted a priori to resolve static features such as terraingradients, land–water boundaries, and/or any other fea-ture that the user includes in the adaptation scheme. Thegrid does not change during the course of the OMEGArun. The OMEGA grid automatically adapts to staticfeatures of the underlying topography such as complexterrain and land–water boundaries.
An example of the flexibility of the OMEGA grid isshown in Fig. 12. This figure shows a grid generatedfor the southeastern United States and Mexico. The gridwas adapted to the underlying topography, the land–water boundaries, and to the initial weather conditions.The synoptic situation chosen was Hurricane Linda at0000UTC on 10 September 1997. In this example, we

JULY 2000 2061B A C O N E T A L .
FIG. 12. The OMEGA grid can adapt to (a) the topography, (b) the land–water boundary, and (c) the weather existing at the time ofmodel initialization (Hurricane Linda). The resulting grid is seen in (d).
have broken the grid-generation process into differentsteps for illustration. The first grid shown was generatedby adapting to gradients in elevation (refining the gridin mountainous areas), the second to gradients in theland–water index (refining the grid in coastal areas), thethird to the hurricane, and the fourth to all of thesecriteria. The final surface grid consists of approximately7300 triangles with edges ranging from roughly 15 to300 km.
In addition to the automatic static adaptation to geo-graphical features, the grid can be refined in one or morespecified geographical areas, such as theaters of oper-ation, by the creation of up to 99 rectangular subdomainsin which higher resolutions are specified. Within eachsubdomain, grid generation is governed by the user-
specified minimum and maximum resolutions. Subdo-mains can overlap to create a high-resolution region ofalmost any shape, or to produce a high-resolution areawithin an intermediate-resolution region. In addition tosubdomains, the user can specify a location on the gridand a radius of influence around it; the grid generatorwill then refine the grid within the region of influence.A smoothing process is also performed on the resolutionspecifications to avoid high expansion ratios at theboundaries of subdomains. A very important point,however, must be made: the result of the use of sub-domains and/or circular region refinement is a single,not nested, grid with variable resolution.
An important feature of the use of an unstructuredgrid is the ability to simulate mountains and coastal

2062 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
features without the ‘‘stair-step’’ geometry required bynested grid models (cf., Zhang et al. 1999). Triangulargrids can naturally follow the coastline better, leadingto improved land–water circulations, and can better cap-ture the geometry of mountainous regions. This is es-pecially important for near-surface simulations.
b. Dynamic grid adaptation
The grid adaptation described so far is a ‘‘static’’adaptation; adaptation is implemented in the grid gen-erator prior to the beginning of an OMEGA run, andthe grid does not change during the simulation. OMEGAalso has the ability to adapt its grid during a simulationto different criteria such as frontal activity, convection,hurricanes, and/or a pollutant plume. This enables at-mospheric features that require additional grid pointsfor adequate simulation to be resolved as they appear.Thus through the combination of adaptation methods(Figs. 9–11) and criteria (Figs. 12a–c), the grid can becoarse where the circulation is regular and smooth, butgreatly refined where there are sharp gradients, wherethere are discontinuities in the flow, where topographicfeatures are important, or where model physics or dis-persion source terms require fine resolution. The un-derlying philosophy of dynamic adaptation is to providea refined grid to resolve important physical events andfeatures as the simulation is in progress.
The dynamic grid adaptation in OMEGA consists offour major steps: 1) at a predetermined time step specificvariables or their gradients are evaluated to see if theymeet the adaptivity criteria, 2) the mesh is refined wherethese criteria are satisfied, 3) the physical variables areinterpolated to new cell centers, and finally 4) the meshis coarsened where the criteria are not met. For example,if there are sharp discontinuities such as propagatingfronts the mesh is refined ahead of the front so that arefined mesh already exists when the front arrives at aspecific location. As the front propagates, the refinedmesh at the previous location of the front is coarsenedto the resolution specific to the background mesh. Thistype of coarsening and refining is performed at prede-termined time step increments.
Physical variables, which are cell centered, are in-terpolated to vertices before each adaptation cycle usingthe pseudo-Laplacian weighted averaging scheme. Asnew cells are created or removed locally a simple linearinterpolation is done to assign values to new verticesand cell centers. All the diagnostic variables are cal-culated for new cells, the particle location array is up-dated, underlying terrain is updated, and the mesh isremasked to calculate new time steps for the time-split-ting scheme. The original base-state variables are alsosaved, and as new cells are created, base-state profilesare generated for these cells using the initial base state.At the beginning of a simulation the minimum elevationis saved. As the grid is refined or coarsened, no cell isallowed to have elevation lower than the initial mini-
mum elevation value. This is to ensure that no extrap-olation is done in the calculation of the base state. Thewhole procedure requires only a few user inputs at thebeginning of the simulation and after the initial inputs,it is completely automated. After the grid has been mod-ified all the physical variables are interpolated to thenew mesh and the diagnostic variables are calculated.
Setting the right criteria for adaptation is very im-portant. There is a significant cost associated with a gridadaptation; hence, the ideal criteria are those that requireminimum computational effort to evaluate yet indicatekey regions requiring additional resolution. If the ad-aptation criteria are particle locations representing a pol-lutant plume or puff, then it becomes a simple step oflocating the cells containing particles, and then taggingthose cells for refinement. This method can becomecostly if there are multiple release sources and the fre-quency of particle releases is very high. The alternativemethod is adapting to the flow itself. This is not asstraightforward as tagging the cells for particle loca-tions. Atmospheric flows are almost always turbulentand highly stratified in the vertical. The gradients areoften weak and hard to detect. One advantage in sim-ulating atmospheric flows, however, is the large tem-poral scale of the simulation (usually 12–48 h). There-fore, even if an event is missed at first, the chances ofcapturing it at a later time are higher.
The OMEGA grid dynamically adapts to any criteriaspecified by the user. For example, OMEGA can providehigh-fidelity solutions in the regions of particle plumesby refining the grid around the particle locations (Fig.13) and coarsening the grid where high resolution is notrequired (e.g., areas from which the plume has alreadypassed). The criteria for adaptation is set by defining aGaussian function around each particle. The regionclose to particles therefore gets higher weighting and istagged for refinement; areas devoid of particles and con-sisting of relatively flat terrain are tagged for coarsening.
Dynamic adaptation was demonstrated for a simpleflow, but including the effects of sulfate chemistry inSarma et al. (1999). This case demonstrated how theuse of dynamic adaptation could capture 85% of thetotal sulfate production computed by a uniform high-resolution simulation, in 20% of the computational time.For our comparison here, we present the results fromtwo pairs of simulations: 1) a high-resolution static sim-ulation compared against an initially coarse-resolutiondynamically adapting simulation and 2) a coarse-reso-lution static simulation compared against a dynamicallyadapting simulation. The former demonstrates that thedynamically adapting solution does, in fact, match thatof a static solution using high resolution at all timeswhile consuming considerably fewer computational cy-cles. The latter demonstrates that dynamic adaptationcan improve the quality of a simulation by resolvingterrain features that might otherwise be missed due tothe use of static resolution.
The first pair of simulations, illustrating the advantage

JULY 2000 2063B A C O N E T A L .
FIG. 13. (a) Global refinement case after 5 h of simulation, (b) dynamic adaptation case after 5 h, (c) globalrefinement case after 15 h, and (d) dynamic adaptation case after 15 h.
of dynamic grid adaptation over global refinement, isshown in Fig. 13. The first case (global refinement case)had a domain of roughly 300 km 3 400 km coveringparts of Nebraska, South Dakota, Iowa, and Minnesota.A variable grid resolution of 5 km to 15 km was spec-ified. The grid had roughly 2300 cells in the horizontallayer with 30 vertical levels. In the vertical, a stretchedgrid was used and the first level near earth’s surface hada thickness of 15 m. A particle source was defined in
the southwest corner of the domain. The simulation wasinitialized using the U.S. Navy’s NOGAPS gridded data.The simulation was run for 15 h.
The second case (dynamic adaptation case) used iden-tical parameters to the global refinement simulation ex-cept for the initial grid size. The starting grid had rough-ly 600 cells in the horizontal (not shown). In this casea variable resolution of 10–36 km was prescribed in theinitial grid. The adaptation criteria was set to particle

2064 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
FIG. 14. Simulation results after 12 h of simulation for (a) the stat-ic case and (b) the dynamic adaptation case.
locations. A refinement cycle was invoked after everyhour of simulation time. Cells were tagged by defininga Gaussian function around the particles. Tagged cellswere refined and all physical fields were interpolated ateach adaptation cycle. A coarsening cycle was invokedafter every 3 h to remove triangles from areas wherehigher resolution was not needed. This was done byidentifying the cells that did not contain particles andwere in the relatively flat regions and then deleting them.The final grid after 15 h of simulation had roughly 1100cells and the resolution varied from 6 to 37 km. Thissimulation required less than 60% of the CPU time yetproduced nearly identical results compared to globalrefinement. The simulation required only the initial userinputs, after which the whole process was seamless andautomated.
In each adaptation cycle, OMEGA updates the un-derlying terrain. Thus, the refinement cycle can resolvefiner topographic features, improving the solution. Thesecond pair of simulations demonstrates this fact (Fig.14). The simulations were conducted in the Four Cor-ners region of the United States, which is characterizedby complex terrain features. The domain and the initialconditions for both simulations were identical. The sim-ulation domain was 300 km 3 300 km in size. Theinitial grid had roughly 450 cells with a varying reso-lution from 7 to 42 km. In the first simulation, the gridwas not refined during the simulation. Figure 14a showsthe particle locations 12 h into the simulation. In thesecond simulation, the grid was adapted dynamicallyduring the simulation. The adaptation criteria was setto particle locations. Figure 14b shows the particle lo-cations for the second simulation after 12 h. The finalgrid had roughly 900 cells in a horizontal layer. As canbe seen from the figure, by resolving finer terrain fea-tures as the grid dynamically adapted to the evolvingplume, a different and presumably more accurate rep-resentation of the flow field (since it will be affected bythe terrain) and hence plume trajectory were achieved.This figure schematically shows that fine spatial dis-cretization of the computational domain may result ina more accurate solution of any complex computationalproblem.
5. Operational considerations
The ultimate consideration of the OMEGA design hasalways been worldwide operational utility. The world-wide real-time operational requirement influenced anumber of design decisions. The OMEGA model hasbeen designed as a delicate balance between physicalfidelity, numerical accuracy, and operational constraints.
First of all, the worldwide operational requirementforced us to develop a number of worldwide databasesincluding 1-km resolution terrain elevation, standard de-viation of terrain elevation (an indicator of surfaceroughness), land–water boundary information, land use,vegetation, coarser 5 arc-minute databases of the ele-
vation and land–water data, and datasets for soil texture,soil moisture, soil temperature, and sea surface tem-perature at various resolutions.
The design point of 1 km for the highest grid reso-lution was also based upon a recognition that althoughworldwide terrain elevation and land–water boundaryinformation is available at even higher resolution,worldwide albedo, land use, vegetation, soil texture, andsoil moisture, as well as the worldwide meteorologicaldata observations, are rarely available at even 1-km res-olution. This determined one level of requirements forthe physics that had to be contained in OMEGA. World-wide utility required that any physical models that wereincorporated into OMEGA would have to have world-

JULY 2000 2065B A C O N E T A L .
TABLE 2. Datasets used to determine surface characteristics for the OMEGA model.
Surface property U.S. data Global data
Terrain elevationland–water
Global elevation and land–water datasets, 59 3 59 and
808–908 Latitude758–808708–758508–708
08–508
300 3 1800300 3 1200200 3 900300 3 600300 3 300
Soil type Webb global soil texture class from GEDCD-ROM, 18 resolution
Climatologicalvegetation index
USGS NDVI annual datasets, 20 resolution Monthly GVI from GED CD-ROM, 109 resolution,USGS NDVI biweekly datasets, 30 arc-secondresolution
Land use/land cover
USGS BATS Land Cover, 2 minute resolution Olson World Ecosystems BATS, land cover fromGED CD-ROM, 309 resolution, USGS 30 arc-sec-onds datasets
Climatological seasurface temperature
Biweekly USGS SST climatology,129 resolution
Climatologicalsubsurfacetemperature
Average monthly air temperature from GEDCD-ROM, 309 resolution
Climatological soilmoisture
Budyko soil moisture budget using averagemonthly temperature and precipitation
from GED CD-ROM,309 resolution
FIG. 15. XOMEGA, the OMEGA GUI
wide applicability and could not rely on datasets thatwere not available with this coverage. This, for example,eliminated the use of a second-order closure turbulencemodel since the Reynolds stress is not operationallyavailable for either initial or boundary conditions.
As part of the real-time operational requirement, agreat deal of automation was also desirable in the OME-GA system. This resulted in the creation of a highlyautomated grid generator, an automated meteorologicaland surface data assimilation system, and a user-friendly
X-windows- and Motif-based Graphical User Interface(GUI) and graphic postprocessors.
With this as a basis, the design objective of OMEGAwas a tool for real-time hazardous prediction capableof performing a fully coupled atmospheric forecast andaerosol or gas dispersion calculation at 10 times realtime. As will be seen, the tremendous flexibility andportability of the OMEGA modeling system permits themodel to meet these constraints on platforms rangingfrom CRAY supercomputers to IBM R/S 6000 work-stations. A built-in runtime estimator aids the user inconfiguring the model on a given platform to meet therequired mission time line. The remainder of this sectionprovides the details of the operational considerations ofthe OMEGA modeling system.
a. Worldwide datasets
A key advantage of the OMEGA model is its world-wide datasets. The OMEGA model has eight majorworldwide databases for terrain elevation, land–waterdistribution, soil type, land use–land cover, climatolog-ical vegetation index, climatological sea surface tem-perature, climatological subsurface temperature, and cli-matological soil moisture (Table 2). In addition to thesedatasets, the worldwide mapping dataset from the Dig-ital Chart of the World is also included in the OMEGAmodeling system.
The first two characteristics (terrain elevation andland–water distribution) are determined from global da-

2066 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
FIG. 16. A selected model domain (a) terrain topography and gridconfiguration; (b) domain decomposition of 16 subdomains of roughlyequal number of cells in each subdomain. The heavy lines show thefirst cut at decomposition, which is refined by further passes. FIG. 17. (a) The grid used to test the parallel performance of
OMEGA and (b) the performance of OMEGA for 1–30 processors.
tasets with two different resolutions: 1) moderate res-olution of 5 arc-minutes (10 km), and 2) high resolutionof 30 arc-second (1 km). The other characteristics relyon newer datasets from various sources. For example,a 18 global soil-type database was created from theGlobal Ecosystems Database (GED) CD-ROM (Webbet al. 1992). The 12 types used in the OMEGA prepro-cessor are sand, loamy sand, silt loam, loam, sandy clayloam, silty clay loam, silt, clay loam, sandy clay, siltyclay, clay, and peat.
In OMEGA, vegetation type is defined for each gridcell based on three different datasets. The first datasetis derived from the global monthly Normalized Differ-ence Vegetation Index (NDVI) datasets covering the pe-riod 1985–90 published on the Global Ecosystems Da-tabase CD-ROM, based on biweekly calibrated global
vegetation index (GVI) data (EDC-NESDIS 1992).These monthly datasets were averaged to form a set ofmonthly climatology files with a resolution of 10 arc-minutes (18 km). The second dataset is derived from aseries of high-resolution Advanced Very High Reso-lution Radiometer (AVHRR) datasets (Eidenshink 1992)over the conterminous Unites States published by theEarth Resources Observation System Data Center of theUnited States Geological Survey (USGS). The datasetswere averaged from 1990 to 1993 to produce biweeklyclimatological datasets covering the conterminous Unit-ed States with a resolution of 2 arc-minutes (about 4km). The third database is a USGS biweekly datasetcovering the globe with a resolution of 30 arc-seconds(1 km).
Similarly, three separate land use datasets were also

JULY 2000 2067B A C O N E T A L .
FIG. 18. Grid for forensic reconstruction of Khamisiyah, Iraq; and observational sites used for OMEGAcomparison: (a) rawinsonde sites and (b) surface observation sites.

2068 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
TABLE 3. Upper air error statistics.
Pressure(mb)
No. ofpoints Me (K) Mae (K) Rmse (K)
Temperature,100,350,500,850
1006902706185
0.290.270.33
20.31
1.351.311.341.53
1.761.721.712.02
Wind speed,100,350,500,850
743651532142
20.2220.1820.29
0.32
6.866.515.954.37
10.4710.219.785.46
Wind direction,100,350,500,850
743651532142
5.916.336.487.88
22.0823.9626.7542.02
35.6137.6940.6756.64
created for the OMEGA model. Each set uses the Bio-sphere–Atmosphere Transfer Scheme (BATS) set of 18land cover categories, with an additional 19th categoryadded for urban land cover. The categories are includedfor crop/mixed farming, short grass, evergreen need-leleaf tree, deciduous needleleaf tree, deciduous broad-leaf tree, evergreen broadleaf tree, tall grass, desert, tun-dra, irrigated crop, semidesert, ice cap/glacier, bog ormarsh, inland water, ocean, evergreen shrub, deciduousshrub, mixed woodland, and urban. A 2 arc-minute (4km) land use dataset covering the United States wasformed from a 1-km BATS dataset and AVHRR data.A 30 arc-minute (55 km) global dataset was formedfrom the Olson (1992) World Ecosystems dataset on theGlobal Ecosystems Database CD-ROM. Also a 30 arc-second (1 km) global dataset was formed from USGS.
OMEGA uses a global sea surface temperature cli-matological dataset produced by the USGS (Schweitzer1993). The data have been processed into a biweeklyglobal, 12 arc-minute resolution (about 20 km) dataset.This data does not extend beyond about 708 latitude ineither hemisphere. Some areas are not covered resultingin large lakes without data; for example the Caspian Seain central Asia is completely missed.
A monthly global subsurface temperature climatologywas built from monthly average surface air temperaturesfrom the Global Ecosystems Database CD-ROM (Le-gates and Willmott 1992). These data were built byusing monthly average surface air temperature as anestimate of subsurface temperature. The dataset reso-lution is 30 arc-minutes. Finally, Budyko’s simple soilmoisture budget as described by Sellers (1965) was usedto generate soil moisture estimates from the temperatureand precipitation data with a 30 arc-minute resolution(Legates and Willmott 1992). This simple approach isfar from perfect, but seems to give reasonable resultsfor a range of climatic types. An iterative applicationof the Budyko equations was used to obtain volumetricsoil water contents that balanced the annual water cycle.
With the exception of the land–water and terrain el-evation databases each of the other surface character-istics databases are organized as sets of latitude–lon-gitude tiles. The global-scale databases use 308 3 308tiles, while the U.S. databases consist of 58 3 58 tiles.FORTRAN logic was devised to allow databases at bothresolutions (U.S. and global coverages) to be used si-multaneously. The higher-resolution data are applied tothe OMEGA grid first, then the coarser-resolution dataare used in any grid cells that have not been filled withvalues. After all of the available databases have beensearched, the database values that have accumulated ineach OMEGA grid cell are averaged to obtain the finalvalue. In the case of the discrete fields (land–water, soiltype and land use), the dominant (most frequent) valuein each cell is considered to represent the entire cell.
b. AutomationAnother key advantage of OMEGA is its integrated
Graphical User Interface, XOMEGA (Fig. 15). XOM-
EGA provides a user-friendly method for the rapid re-configuration of the model. Starting from a browse mapof the world, an operator can use XOMEGA to set upand start a simulation anywhere in the world in a matterof minutes. XOMEGA simplifies the process of definingthe computational domain, generating a grid with ap-propriate resolutions, acquiring the meteorological datafiles, building the initial and boundary conditions forthe OMEGA model, specifying the source characteris-tics for the ADM model if there are any, running theOMEGA model, and finally analyzing the OMEGAmodel results.
In addition to XOMEGA, an X-windows graphicspostprocessing and analysis tool has been developed forthe OMEGA model in order to analyze the OMEGAmodel results. XGRID brings a wealth of functionalityto the OMEGA modeling system and includes the abilityto overlay OMEGA output on mapping data from theDigital Chart of the World. XGRID also permits theexamination of vertical cross sections of the OMEGAoutput, and the creation of standard skew T–logp dia-grams. Using XGRID, the user can examine both me-teorological and ADM results. A scripting capabilitymakes it easy to create routine products automatically,creating either Postscript or GIF files, which can bespooled into a printer or incorporated into other prod-ucts, or MPEG animations.
c. Runtime issues
The runtime requirement for the operational modelsis the primary issue driving the development. The OME-GA model is CPU bound. Normally less than 1% of theCPU is used for input/output and memory management.OMEGA is dominated by vector operations, which areinherently faster than scalar operations and hence goodexecution speeds are being achieved. OMEGA alsoshowed a computational intensity ratio of flops to mem-ory references of 0.99.

JULY 2000 2069B A C O N E T A L .
TABLE 4. Surface temperature statistics.
Station Alt. diff. (m) No. of points Me (K) Mae (K) Rmse (K)
AF37AF62AF67Al JoufArarDhahranEsfahanGassim
000
1115539
551144
5868736924721570
21.231.22
21.4422.8424.4720.3027.1220.72
2.212.062.052.964.471.007.122.23
3.023.322.773.484.811.387.502.50
Hafar al BatinHailKermanshahMadinahMafraqRafhaRiyadhTabrizTabukTehran
232114
5216
2393172
13362
90169
71691272
76570701417
20.9721.9021.6822.39
3.1522.28
0.660.58
23.431.37
1.222.292.122.673.152.451.001.893.543.30
1.722.602.792.913.503.081.282.274.073.68
TABLE 5. Surface wind speed statistics.
Station Alt. diff. (m) No. of points Me (kt) Mae (kt) Rmse (kt)
AF37AF62AF67Al JoufArarDhahranEsfahanGassim
000
1115539
551144
5869736924721570
22.0820.6320.5324.1421.9421.69
4.00.23
3.272.832.424.782.973.185.772.93
3.993.623.166.263.594.116.563.91
Hafar al BatinHailKermanshahMadinahMafraqRafhaRiyadhTabrizTabukTehran
232114
5216
2393172
13362
90169
71701072
76570701417
24.5321.27
0.150.999.16
25.7720.26
1.534.29
21.42
5.622.995.862.949.165.982.704.196.255.12
6.074.406.643.609.837.003.585.087.096.47
The optimization level used in the OMEGA modelmaximizes inlining and vectorization. Inlining is a tech-nique to reduce CPU associated with subroutine/func-tion calls. It can cost up to 150 clock cycles to call asingle argument subprogram. Vectorization allows a sin-gle operation to be performed on vectors of operandsinstead of sequentially for each operand. With the op-timization level used in the OMEGA model, the overallcomputational speed achieved is slightly over 40Mflops.
Parallelization is another state-of-the-art technique toboost computational speedup by multiprocessing. How-ever, unstructured grid models tend to demand signifi-cantly more synchronization and geometry mappingoverhead in their parallelization algorithm. A version ofOMEGA with explicit parallelization using the MessagePassing Interface (MPI) library is undergoing testing onparallel workstation platforms. The functionality ofMPI’s allows (a) parallelization in an overarching man-
ner in the OMEGA model time advancement loop, mak-ing message passing minimal; (b) pinpointing solutionsto the idle time, or the imbalanced load problem, suchas techniques accounting for the time-masked subcy-cling and dynamic domain-decomposition; and (c)transportability.
Parallelization by domain decomposition of the modeldomain into contiguous subdomains is currently underdevelopment and testing. Figure 16 shows an exampleof the technique applied to a typical OMEGA grid. Thefigure shows how the solution area is decomposed into16 subdomains resulting in roughly the same numberof cells in each of the subdomains. On top of the com-munication overheads, stacking and unstacking arraysfor lumped message passing is an inherent overhead forunstructured grid models. These extra CPU costs areboth related to message passing; however, by far themajority of the total overhead is due to uneven loadbalancing among the processors. For application on

2070 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
TABLE 6. Surface wind direction statistics.
Station Alt. diff. (m) No. of points Me (8) Mae (8) Rmse (8)
AF37AF62AF67Al JoufArarDhahranEsfahanGassim
000
1115539
551144
5869736924721570
24.9210.796.353.99
23.2134.45
21.0118.21
31.1060.5329.9175.4855.7748.72
104.7531.47
45.4081.8538.6394.5874.8166.96
117.3442.77
Hafar al BatinHailKermanshahMadinahMafraqRafhaRiyadhTabrizTabukTehran
232114
5216
2393172
13362
90169
71701072
76570701417
218.1316.7010.3113.09
105.68226.0726.7027.3823.7539.63
25.4668.5357.5158.68
105.6847.8930.0850.5255.1579.96
30.3585.4168.2769.84
113.4965.7637.3669.1467.4289.86
FIG. 19. The OMEGA-model-predicted and observed diurnal cycle of the atmosphere at Riyadh.
massively parallelized machines the scheme is designedto utilize over 100 processors. MPI command calls fa-cilitate the parallelization of the time advancement loopof the model.
The parallel efficiency of OMEGA is roughly 95%.Amdahl’s law (1967) states that the speedup achievedby using N processors of a numerical algorithm that isf p percent parallelized is
1speedup 5 .
1 2 f 1 f /Np p
Figure 17a shows a large grid that was constructed fortesting the parallel version of OMEGA. This grid has13 935 cells in each of 31 levels. The grid resolutionranged from 5 to 50 km. Figure 17b shows the perfor-mance of OMEGA for 1–30 processors. Also shown arethe theoretical ideal performance curves for 95% and99% parallelization.
d. Portability issues
OMEGA produces a variety of output files (both binaryand ASCII) depending on the mode of operation. Thefrequency of output is controlled by the user and is gen-erally set for hourly. In order to allow OMEGA outputfrom one system to be read and/or visualized on differenthardware, we have developed a machine-independent,packed binary output data format for OMEGA.
The packed binary format is a form of compressionthat results in files that are written and read on the bytelevel by routines written in the C programming lan-guage. These files are now completely portable and maybe cross ported to any machine, including PCs. Thereis a small penalty in runtime, which is more than com-pensated for by savings in postprocessing. The packedbinary format files are also smaller and more efficientto read. In general, data are written using eight bytesto represent one number. With packed binary, this same

JULY 2000 2071B A C O N E T A L .
FIG. 20. The OMEGA-model-predicted and observed diurnal cycle of the wind speed anddirection at Riyadh.
FIG. 21. The OMEGA-model-predicted and observed vertical profiles of (left) temperature and dewpoint and (right) wind speed and di-rection for Riyadh at 84 h after initialization.
number may be represented by as little as one byte.Although accuracy diminishes as fewer bytes are used,for most purposes, we have found that the use of twobytes, which results in accuracy to five significant digits,is sufficient and requires one-quarter the amount of diskspace used generally.
6. Forensic reconstruction of Khamisiyah, Iraq
The creation of OMEGA was prompted, in part, bythe lack of a high-fidelity, high-resolution atmosphericdispersion capability during the Desert Storm militarycampaign. It was recognized that both the meteorolog-ical and dispersion simulation capabilities would haveto be improved in order to deal with situations that weredata sparse or data denied. OMEGA was created to ob-
tain the maximum utility from the available meteoro-logical and surface information. Given this genesis, itwas natural that OMEGA would be called upon to re-construct the meteorological event in Khamisiyah, Iraq,on 10 March 1991.
In early March 1991, U.S. forces destroyed manyweapons bunkers in Iraq. Some years later, it was dis-covered that a cache of weapons destroyed at Khami-siyah on the afternoon of 10 March contained chemicalagents. The reconstruction of the atmospheric conditionsat the time of the release was a major undertaking in-volving the acquisition of raw meteorological data frommany sources, gridded analyses, and the detailed sim-ulation of the mesoscale circulations of the region. Dur-ing this reconstruction, it was discovered that much ofthe operational data were delayed or denied for the area

2072 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
FIG. 22. OMEGA-predicted and observed diurnal cycle of the atmosphere for Hafar al Batin.
FIG. 23. The OMEGA-predicted and observed wind speed and direction for Hafar al Batin.
and thus did not make it into the archived analyses andoperational data archives. This led to a search for thelate arriving data and the rerunning of the simulations.Thus, it is important to understand that the simulationpresented here is merely the latest in a chain of simu-lations conducted to reconstruct the meteorologicalevents at the time of the event.
The computational domain enclosed the area boundedby approximately 228–408N and 358–558E. Figure 18shows the OMEGA grid used for this simulation. Thisgrid contained 4333 cells in each of 30 levels. The gridprovided high resolution around the Khamisiyah pit andsome of the observation locations using the static ad-
aptation capability of the OMEGA model. The simu-lation was initialized with gridded data from the GlobalOptimal Interpolation archives of NCAR and observa-tional data obtained from multiple sources. Model ini-tialization time was 0000 UTC 10 March 1991 and thesimulation period was 84 h extending to 1200 UTC 13March 1991.
The OMEGA results were then compared to obser-vational data. The only observational data that wereavailable were rawinsonde (15 sites) and surface ob-servations (18 sites) from several locations in the region(see Fig. 18). In order to compare point data with thethree-dimensional output of OMEGA, we wrote a post-

JULY 2000 2073B A C O N E T A L .
FIG. 24. The OMEGA-model-predicted and observed the vertical profile of (left) temperature and dewpoint and (right) wind speed anddirection for Hafar al Batin, the closest observation to Khamisiyah.
processor that locates the OMEGA cell centroids closestto the observational points, and outputs pseudo–surfaceobservations and pseudo–rawinsonde observations atthese locations. These pseudoobservations were com-pared against the actual observations and error statisticswere also calculated. The statistics produced were meanerror (me), mean absolute error (mae), and root-mean-square error (rmse) for temperature, wind speed, andwind direction. Table 3 shows these error statistics forupper air at various pressure levels computed over the3-day forecast duration (0000 UTC 10 Mar 1991–0000UTC 13 Mar 1991) using all the rawinsonde data (every12 h) and all the locations (15 sites) within the com-putational domain, while Tables 4–6 show the error sta-tistics for surface level computed over the 3-day forecastduration (0000 UTC 10 Mar 1991–0000 UTC 13 Mar1991) using all the surface observation data (every hour)and all the locations (18 sites).
The above statistical results indicate that the OMEGAmodel predicted the meteorological conditions thatmight have existed during the period of 10–13 March1991 reasonably well. For example, upper air temper-ature statistics indicate less than 0.5-K temperature bias,less than 1.5-K mean absolute error, and less than 2-Kroot-mean-square error in upper air error statistics, whilesurface error statistics indicate wide range values. Thesewide range values could be due to the altitude differencebetween the observational site and the sampled closestOMEGA cell.
To examine the observational datasets in greater de-tail, two sites across the simulation domain were alsochosen to compare both the rawinsonde and hourly sur-face observations with OMEGA prediction. The follow-ing sites were chosen: Riyadh and Hafar Al Batin (seeFig. 18). Figure 19 shows comparison of the 72-h timehistory of OMEGA-predicted surface temperature (bluesolid line), dewpoint temperature (blue dashed lines),and wind speed and direction (blue wind bars) withsurface observations (red) for Riyadh. A more detailed
evaluation of the surface wind speed and direction isalso shown in Fig. 20. Note that 72-h surface statisticsare also calculated and printed in the top-right cornerof each figure. Both the figures indicate that the OME-GA-predicted values during the 72-h period show verygood agreement with observations. For example, tem-perature statistics indicate 0.66-K bias, 1-K mean ab-solute error, and 1.28-K root-mean-square error, whileboth surface wind speed and direction also show verygood agreement with observations. Figure 21 shows thecomparison of the OMEGA model sounding (blue line)with the observed sounding (red line) at Riyadh 1200UTC 13 March 1991 (84 h of forecast). The soundingshows very dry air with very little vertical directionalwind shear. The wind is predominately from the westexcept for a small segment from ground level to 1 kmabove the surface where the wind is from the southwest.Temperature, wind speed, and wind direction profilesshow very good agreement with the observed values inboth soundings and surface observations. Figures 22 and23 show the same diurnal cycle for Hafar Al Batin.Again the predicted values show very good agreementwith observed values with the exception of wind speed.In this location, the wind speed is slightly underesti-mated as compared to the observed values. Note alsothat the predicted surface temperature is slightly devi-ated from the observation on the third day of the fore-cast. We believe that this may be due to the fact thatthe OMEGA model is run in a straight forecast mode.This can be overcome by running the model in reanal-ysis mode, reinitializing the model every 12 h using theOMEGA-model-predicted fields as a first guess, and in-gesting new observations.
The corresponding sounding profile taken at Hafar AlBatin at 1200 UTC 12 March 1991 (48 h of forecast)is shown in Fig. 24. As the night progresses, both tem-perature and wind exhibit a very complex behavior, asopposed to the case presented at Riyadh (daytime sit-uation). The bottom portion of the atmospheric bound-

2074 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
FIG. 25. A close-up view of the northern Persian Gulf region showing the OMEGA-simulated oil field fire plumes and the AVHRR imagedata. The top row shows (a) the forecasted dispersion and (b) the observed at 1030 UTC 10 Mar 1991; the bottom row shows the same for1020 UTC 11 Mar 1991.
ary layer is transformed by its contact with the groundinto a nocturnal stable boundary layer. The OMEGAmodel captures this feature reasonably well (Fig. 24).The temperature near the surface drops dramatically be-cause the outgoing net radiation is not compensated bythe downward heat flux. This is characterized in Fig.24a by statically stable air with weaker, sporadic tur-bulence near the bottom. At the same time, the OMEGAsimulations indicate a strong wind shear forms near thesurface due to the downward transfer of momentum.However, the observation does not show this feature,possibly due to a lack of resolution near the surface.
(Also note in Fig. 24b that a clearly bad velocity datapoint was reported at the 810-mb level.)
The statistics and the detailed analysis at Hafar AlBatin and Riyadh presented here have demonstrated thatthe OMEGA model reconstructed the meteorologicalconditions in southeastern Iraq very well for the periodfrom 10 to 13 March 1991. Table 6 also indicates thatthere is distinctly better agreement between the obser-vations and the simulation results for those regions thatare well resolved spatially (cf. Fig. 18). This shows thepotential that an adaptive grid simulation system bringsto atmospheric simulation.

JULY 2000 2075B A C O N E T A L .
Finally, Fig. 25 shows OMEGA-predicted plumesfrom the oil well fires in Kuwait compared with theobserved plumes. Careful examination of the AVHRRimagery shows that there seem to be both a surfacecomponent and a high-altitude component to the pol-lutant source. Because of this unknown aspect of theoil fires, they were simulated in OMEGA using twodifferent elevated releases—one at 20 m and one at 1500m. The results shows that OMEGA predicted a plumetrajectory and spread well in qualitative agreement withthe satellite observations.
7. Conclusions
The OMEGA modeling system represents a signifi-cant departure from the traditional methods used in nu-merical weather prediction and real-time hazard predic-tion. For the first time in recent years, advanced nu-merical and grid-generation methods developed by thecomputational fluid dynamics community have beensuccessfully applied to the problem of atmospheric sim-ulation. This has permitted the development of an ex-tremely high resolution and flexible operational atmo-spheric simulation system. Future articles will presenta spectrum of case studies using OMEGA providingadditional validation of the model as well as demon-strating in more depth the flexibility and power of un-structured static and dynamically adapting grids.
To the best of our knowledge, the OMEGA modeland its Atmospheric Dispersion Model are the only op-erational atmospheric flow system based on unstructuredgrid technique, which fully exploits the advantages andflexibility of unstructured grids. It can adapt its gridboth statically and dynamically to different criteria suchas fronts, clouds, hurricanes, and plumes, etc. For real-time flow predictions, the capability of grid adaptivity,given the CPU constraint, becomes important. This ca-pability is also crucial in responding to emergency sce-narios such as release of hazardous materials. OMEGAwith its grid adaptation capability has a potentiallyunique advantage over other atmospheric flow modelsin providing accurate solutions quickly in an operationalsetting.
Acknowledgments. This work was supported by theDefense Threat Reduction Agency (DTRA) under Con-tracts DNA001-92-C-0076, DNA001-95-C-0130, andDTRA 01-99-C-0007. The authors would like to thanktheir program managers, Dr. Charles Gallaway, Dr.James Hodge, and Maj. Thomas Smith, for their support.The authors would also like to thank to Dr. Michael D.McCorcle, Mr. Christopher Agritellis, Mr. Douglas E.Mays, and Mr. Tim Wait for their many contributionsto this effort.
REFERENCES
Amdahl, G. M., 1967: Validity of the single processor approach toachieving large scale computer capabilities. Proc. of the AFIPS
Spring Joint Computer Conference, Vol. 30, AFIPS Press, 483–485.
Anthes, R. A., 1977: A cumulus parameterization scheme utilizing aone-dimensional cloud model. Mon. Wea. Rev., 105, 270–286.
Arya, S. P., 1999: Air Pollution Meteorology and Dispersion. OxfordUniversity Press, 157 pp.
Bacon, D. P., and R. A. Sarma, 1991: Agglomeration of dust in con-vective clouds initialized by nuclear bursts. Atmos. Environ.,25A, 2627–2642.
Baum, J. D., and R. Lohner, 1994: Numerical simulation of shock-elevated box interaction using an adaptive finite element shockcapturing scheme. AIAA Journal, 32, 682–692., H. Luo, and R. Lohner, 1993: Numerical simulation of a blastinside a Boeing 747. 24th Fluid Dynamics Conf., AIAA 93-3091,1–8.
Beljaars, A. C. M., and A. A. M. Holstslag, 1991: Flux parameter-ization over land surfaces for atmospheric models. J. Appl. Me-teor., 30, 327–341.
Boybeyi, Z., S. Raman, and P. Zannetti, 1995: Numerical investigationof possible role of local meteorology in Bhopal gas accident.Atmos. Environ., 29, 479–496.
Chang, J. T., and P. J. Wetzel, 1991: Effects of spatial variations ofsoil moisture and vegetation on the evolution of a prestorm en-vironment: A numerical case study. Mon. Wea. Rev., 119, 1368–1390.
Charnock, H., 1955: Wind stress on a water surface. Quart. J. Roy.Meteor. Soc., 81, 639–640.
Cote, J., J.-G. Desmarais, S. Gravel, A. Methot, A. Patoine, M. Roch,and A. Staniforth, 1998a: The operational CMC–MRB GlobalEnvironmental Multiscale (GEM) model. Part II: Results. Mon.Wea. Rev., 126, 1397–1418., S. Gravel, A. Methot, A. Patoine, M. Roch, and A. Staniforth,1998b: The operational CMC–MRB Global Environmental Mul-tiscale (GEM) model. Part I: Design considerations and for-mulation. Mon. Wea. Rev., 126, 1373–1395.
Daley, R., 1991: Atmospheric Data Analysis. Cambridge UniversityPress, 457 pp.
Deardorf, J. W., 1974: Three-dimensional study of the height andmean structure of a heated planetary boundary layer. Bound.-Layer Meteor., 7, 81–106.
Dietachmeyer, S. G., and K. K. Drogemeier, 1992: Application ofcontinuous dynamic grid adaptation techniques to meteorolog-ical modeling. Part I: Basic formulation and accuracy. Mon. Wea.Rev., 120, 1675–1706.
DiMego, G. J., 1988: The National Meteorological Center regionalanalysis system. Mon. Wea. Rev., 116, 977–1000.
Dudia, J., 1993: A nonhydrostatic version of the Penn State/NCARmesoscale model: Validation tests and simulation of an Atlanticcyclone and cold front. Mon. Wea. Rev., 121, 1493–1513.
EDC-NESDIS, 1992: Monthly global vegetation index from Gallobi-weekly experimental calibrated GVI (April 1985–December1990). Digital raster data on a 10-minute geographic (lat/long)1080 3 2160 grid. Global Ecosystems Database, version 1.0,National Geophysical Data Center, NOAA, Boulder, CO, 69 in-dependent single-attribute data layers on CD-ROM, disk A.
Eidenshink, J. E., 1992: The conterminous United States AVHRRdata set. Photogramm. Eng. Remote Sens., 58, 809–813.
Fiedler, B., Z. Huo, and P. Zhang, 1998: Dynamic grid adaption foratmospheric boundary layers. Preprints, 12th Conf. on NumericalWeather Prediction, Phoenix, AZ, Amer. Meteor. Soc., 253–254.
Fritts, M. H., 1988: Adaptive gridding strategies for Lagrangian cal-culations. Comput. Phys. Comm., 48, 75–88.
Grell, G. A., J. Dudhia, and D. R. Stauffer, 1994: A description ofthe Fifth-Generation Penn State/NCAR Mesoscale Model(MM5). NCAR/TN-3981IA, National Center for AtmosphericResearch, Boulder, CO, 107 pp.
Hoke, J. E., N. A. Phillips, G. J. DiMego, J. J. Tuccillo, and J. G.Sela, 1989: The regional analysis and forecast system of theNational Meteorological Center. Wea. Forecasting 4, 323–334.

2076 VOLUME 128M O N T H L Y W E A T H E R R E V I E W
Janjic, Z. I., 1990: The step-mountain coordinate: Physical package.Mon. Wea. Rev., 118, 1429–1443.
Jones, R. W., 1977: A nested grid for a three-dimensional model ofa tropical cyclone. J. Atmos. Sci., 34, 1528–1553.
Karniadakis, G. E. M., and S. J. Sherwin, 1999: Spectral/hp ElementMethods for CFD. Numerical Mathematics and Scientific Com-putation Series, Oxford University Press, 390 pp.
Klemp, J. B., and R. Wilhelmson, 1978: The simulation of three-dimensional convective storm dynamics. J. Atmos. Sci., 35,1070–1096.
Kuo, H. L., 1965: On formation and intensification of tropical cy-clones through latent heat release by cumulus convection. J.Atmos. Sci., 22, 40–63., 1974: Further studies of the parameterization of the influenceof cumulus on large scale flow. J. Atmos. Sci., 31, 1232–1240.
Legates, D. R., and C. J. Willmott, 1992: Monthly average surfaceair temperature and precipitation. Digital raster data on a 30minute geographic (lat/long) 360 3 720 grid. Global EcosystemsDatabase, version 1.0, National Geophysical Data Center,NOAA, Boulder, CO, 48 independent and 4 derived single-at-tribute spatial layers on CD-ROM, disk A.
Lilly, D. K., 1990: Numerical predictions of thunderstorms—Has itstime come? Quart. J. Roy. Meteor. Soc., 116, 779–798.
Lin, Y.-L., R. D. Farley, and H. D. Orville, 1983: Bulk parameteri-zation of the snow field in a cloud model. J. Climate Appl.Meteor., 22, 1065–1092.
Lottati, I., and S. Eidelman, 1994: A second-order Godunov schemeon a spatial adapted triangular grid. Appl. Numer. Math., 14,353–365.
Luo, H., J. D. Baum, R. Lohner, and J. Cabello, 1994: Implicitschemes and boundary conditions for compressible flows on un-structured meshes. Preprints, 32d Aerospace Sciences Meetingand Exhibit, AIAA 94-0816, Reno, NV, 12 pp.
Mahrer, Y., and R. A. Pielke, 1977: The effects of topography on thesea and land breezes in a two-dimensional numerical model.Mon. Wea. Rev., 105, 1151–1162.
McCorcle, M. D., 1988: Simulation of soil moisture effects on theGreat Plains low-level jet. Mon. Wea. Rev., 116, 1705–1720.
McPherson, R., 1991: 2001—An NMC odyssey. Preprints, NinthConf. on Numerical Weather Prediction, Denver, CO, Amer.Meteor. Soc., 1–4.
Mellor, G. L., and T. Yamada, 1974: A hierarchy of turbulence closuremodels for planetary boundary layers. J. Atmos. Sci., 31, 1791–1806., and , 1982: Development of a turbulence closure modelfor geophysical fluid problems. Rev. Geophys. Space Phys., 20,851–875.
Mesinger, F., Z. I. Janjic, S. Nickovic, D. Gavrilov, and D. G. Deaven,1988: The step-mountain coordinate: Model description and per-formance for cases of Alpine lee cyclogenesis and for a case ofan Appalachian redevelopment. Mon. Wea. Rev., 116, 1494–1518.
Molinari, J., and M. Dudek, 1986: Implicit versus explicit convectiveheating in numerical weather prediction models. Mon. Wea. Rev.,114, 1822–1831.
Moran, M. D., 1992: Numerical modeling of mesoscale atmosphericdispersion. Ph.D. dissertation, Colorado State University, FortCollins, CO, 758 pp. [Available from Dept. of Atmospheric Sci-ence, Colorado State University, Fort Collins, CO 80523.]
Noilhan, J., and S. Planton, 1989: A simple parameterization of landsurface processes for meteorological models. Mon. Wea. Rev.,117, 536–549.
Olson, J. S., 1992: World ecosystems (WE1.4). Digital raster data ona 10-minute geographic 1080 3 2160 grid. Global EcosystemsDatabase, version 1.0, National Geophysical Data Center,
NOAA, Boulder, CO, 3 independent single-attribute spatial lay-ers on CD-ROM, disk A.
Pielke, R. A., and Coauthors, 1992: A comprehensive meteorologicalmodeling system—RAMS. Meteor. Atmos. Phys., 49, 69–91.
Proctor, F. H., 1987: The Terminal Area Simulation System/VolumeI: Theoretical formulation, NASA Contractor Rep. 4046, 154 pp.[Available from U.S. Dept. of Commerce, National TechnicalInfo. Service, Springfield, VA 22151.]
Sarma, A., N. Ahmad, D. Bacon, Z. Boybeyi, T. Dunn, M. Hall, andP. Lee, 1999: Application of adaptive grid refinement to plumemodeling. C. A. Brebbia, N. Jacobson, and H. Power, Eds. AirPollution VII, WIT Press, 59–68.
Sasamori, T., 1972: A linear harmonic analysis of atmospheric motionwith radiative dissipation. J. Meteor. Soc. Japan, 50, 505–518.
Schnack, D. D., I. Lottati, Z. Mikic, and P. Satyanarayana, 1998: Afinite-volume algorithm for three-diminsional magnetohydro-dynamics on an unstructured, adaptive grid in axially symmetricgeometry. J. Comput. Phys., 140, 71–121.
Schweitzer, P. N., 1993: Modern Average Global Sea-Surface Tem-perature. U.S. Geological Survey Digital Data Series DDS-10,CD-ROM.
Sellers, W. D., 1965: Physical Climatology. University of ChicagoPress, 272 pp.
Skamarock, W. C., and J. B. Klemp, 1993: Adaptive grid refinementfor two-dimensional and three-dimensional nonhydrostatic at-mospheric flow. Mon. Wea. Rev., 121, 788–804.
Smolarkiewicz, P. K., 1984: A fully multidimensional positive definiteadvection transport algorithm with small implicit diffusion. J.Comput. Phys., 54, 325–362., and T. L. Clark, 1986: The multidimensional positive definiteadvection transport algorithm: Further development and appli-cation. J. Comput. Phys., 67, 396–438., and W. W. Gradowski, 1990: The multidimensional positiveadvection transport algorithm: Nonoscillatory option. J. Comput.Phys., 86, 355–375.
Staniforth, A., J. Cote, and J. Pudykiewicz, 1987: Comments on‘‘Smolarkiewicz’s deformational flow.’’ Mon. Wea. Rev., 115,894–900.
Sykes, R. I., W. S. Lewellen, and S. F. Parker, 1986: A Gaussianplume model of atmospheric dispersion based on second-orderclosure. J. Climate Appl. Meteor., 25, 322–331.
Uliasz, M., 1990: Development of the mesoscale dispersion modelingsystem using personal computers. Part I: Models and computerimplementation. Meteor. Z., 40, 110–120.
Webb, R. S., C. E. Rosenzweig, and E. R. Levine, 1992: A globaldata set of soil particle size properties. Digital raster data on a1-degree geographic (lat/long) 180 3 360 grid. Global Ecosys-tems Database, version 1.0, National Geophysical Data Center,NOAA, Boulder, CO, 2 independent and 1 derived spatial layerwith 65 attributes on CD-ROM, disk A.
Wilson, D. J., J. E. Fackrell, and A. G. Robins, 1982a: Concentrationfluctuations in an elevated plume: A diffusion-dissipation ap-proximation. Atmos. Environ., 16, 2581–2589., A. G. Robins, and J. E. Fackrell, 1982b: Predicting the spatialdistribution of concentration fluctuations from a ground levelsource. Atmos. Environ., 16, 497–504.
Xue, M., K. K. Drogemeier, V. Wong, A. Shapiro, and K. Brewster,1995: ARPS version 4.0 user’s guide. CAPS, 380 pp. [Availablefrom CAPS, University of Oklahoma, Norman, OK 73019.]
Zhang, D.-L., H.-R. Chang, N. L. Seaman, T. T. Warner, and J. M.Fritsch, 1986: A two-way interactive nesting procedure with var-iable terrain resolution. Mon. Wea. Rev., 114, 1330–1339., Y. Liu, and M. K. Yau, 1999: Surface winds at landfall ofHurricane Andrew (1992)—A reply. Mon. Wea. Rev., 127, 1711–1721.