Distributed Algorithm for RoboticNetwork Self-deployment ...

of 3
Upload
mpsmoorthyCategory
view
219download
08/7/2019 A Distributed Self-Deployment Algorithm for The
1/3
IEEE COMMUNICATIONS LETTERS, VOL. 13, NO. 11, NOVEMBER 2009 877
A Distributed Self-Deployment Algorithm for theCoverage of Mobile Wireless Sensor Networks
Teddy M. Cheng and Andrey V. Savkin
AbstractThis letter addresses a coverage problem throughthe use of a self-deployed mobile wireless sensor network. Wepropose a distributed motion coordination algorithm for the mo-bile sensors to autonomously form a sensor barrier between twogiven landmarks to achieve the barrier coverage. The algorithmis developed based on some simple rules that are computationallyefficient and require less communication overhead.
Index TermsWireless sensor networks, mobile sensor net-works, sensor deployment, distributed systems, barrier coverage.
I. INTRODUCTION
COVERAGE is an important issue and considered to bea measure of quality of service of a wireless sensornetwork [1], [2]. In this letter, we address the coverage ofa wireless sensor network using a group of self-deployed
mobile sensors. Particularly, we concentrate on studying the
self-coordination of the mobile sensors to achieve barrier
coverage [3][6].
Our barrier coverage is to deploy a group of autonomous
mobile sensors to form a sensor barrier that detects any object
from entering a protected region between two landmarks or
points. A sensor barrier is defined as an array of mobilesensors with sensors lying on the line segment between the
two landmarks in an equally-spaced manner, and every pointon the line segment is covered by the sensing region of at
least one sensor. Once the sensor barrier is formed, the sensors
maintain this configuration so that any crossing paths through
the line segment are covered by the sensors. The objective
of this letter is to theoretically develop a set of distributed
motion coordination rules for a group of self-deployed mobile
sensors to achieve barrier coverage between the landmarks.
For instance, the landmarks can be considered as two far-apart
posts on a countrys border and the surveillance requirement is
that any passing intruder has to be detected between the posts.
Due to the vast geographical nature, it is natural to deploya low-cost, low-power mobile wireless sensor network for
such a task. In this case, one can simply dispatch the mobilesensors near the landmarks and let them relocate themselves
autonomously to meet the deployment objective.
In contrast to the works [1][3], we study how to drive a
group of mobile sensors autonomously and cooperatively to
address the issue of coverage in this letter, rather than study
where the sensors or how many sensors should be placed. For
Manuscript received June 1, 2009. The associate editor coordinating thereview of this letter and approving it for publication was J. Holliday.
This work was supported by the Australian Research Council.T. M. Cheng (corresponding author) and A. V. Savkin are with the School
of Electrical Engineering and Telecommunications, the University of NewSouth Wales, Sydney, NSW 2052, Australia (e-mail: [email protected]).
Digital Object Identifier 10.1109/LCOMM.2009.091178
X
X
X
X
X
X
X
X
X
X
X
X
(a) (b)
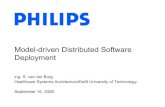
Fig. 1. (a) Initial deployment of a group of mobile sensors ( = 6) and thereexists an undetected path between landmarks 1 and 2 (); (b) Positions of
the sensors after the self-deployment and the sensors provide barrier coveragebetween the landmarks (-communication range and -sensing range).
the sensor dispatchment problem studied in [5], informationabout a set of designated positions for the sensors is required
to be precomputed and broadcasted to the sensors from a sink.
On the other hand, the mobile sensors considered here do not
have such a priori information, resulting in less computational
and communication overhead. The algorithm proposed in [6]addressed a barrier coverage problem where the mobile sen-
sors are required to be confined in a predefined rectangular
region. In addition, as compared to [5], [6], a completely
different approach is taken here; our algorithm is developed
through the use of consensus algorithms (see, e.g., [7], [8])
that are simple and only require local information, and hence,it is distributed and scalable.
I I . PROBLEM FORMULATION
In this letter, we consider two landmarks located at 1, 2 2. We let be a unit vector such that = (2 1)/(2
1), where denotes the Euclidean norm. The vector characterizes the bearing of landmark 2 relative to landmark1
and we write = [cos() sin()] for some . Withoutloss of generality, we assume that [/2, /2). Using ,1 and 2, we define a line 0 := { 2 : = 0},where is a normal unit vector to 0 such that = 0 and0 = 1 is the associated scalar. Our problem is to developa distributed motion coordination algorithm for a network of
mobile wireless sensors to form a sensor barrier between 1and 2 autonomously (see Fig. 1).
A mobile wireless sensor network consisting of sensorslabeled 1 through is considered here. Given > 0, thediscrete-time kinematic equation of the sensors is
(( + 1)) = () + ()(), = 0, 1, 2, . . . ,
(1)
1089-7798/09$25.00 c 2009 IEEE
Authorized licensed use limited to: PSN College of Engineering and Technology. Downloaded on July 28,2010 at 12:00:26 UTC from IEEE Xplore. Restrictions apply.
8/7/2019 A Distributed Self-Deployment Algorithm for The
2/3
878 IEEE COMMUNICATIONS LETTERS, VOL. 13, NO. 11, NOVEMBER 2009
for = 1, 2, . . . , where () 2 is the coordinate ofsensor and () = [cos(()) sin(())] with () defined as its heading measured from the -axis in the counter-clockwise direction. The velocity () and the heading ()are the control inputs of sensor , and () satisfies () max for all 0 and some max > 0. At each time , thesensors communicate with their surrounding neighbors that are
located in the disk ,() :=
{
2 :
()
}where > 0 is the communication range. In addition, eachmobile sensor can detect any object in the range of (0, )at any time.
Assumption 2.1: The scalar max satisfies < max /
2. Assumption 2.2: The number of sensors, , satisfies ( +
1) > 2 1. Assumption 2.3: The initial headings satisfy (0) [0, )
for all = 1, 2, . . . , , and the initial positions of the sensorsare in a bounded set with Lebesgue measure1.
Remark 2.1: For given and max, the condition