Drunk-Driver Detection and Alert System (DDDAS) for Smart ...

Y. Bazilevs, A.L. Marsden, F. Lanza di Scalea,
A. Majumdar, and M. Tatineni University of California, San Diego
A DDDAS Framework for Large-Scale Composite Structures Based on Continually and Dynamically
Injected Sensor Data
PhD Students/Postdocs: X. Deng, A. Korobenko, and J. Tippmann,
AFOSR DDDAS Program Review, IBM TJ Watson Research Center, December 1-3, 2014
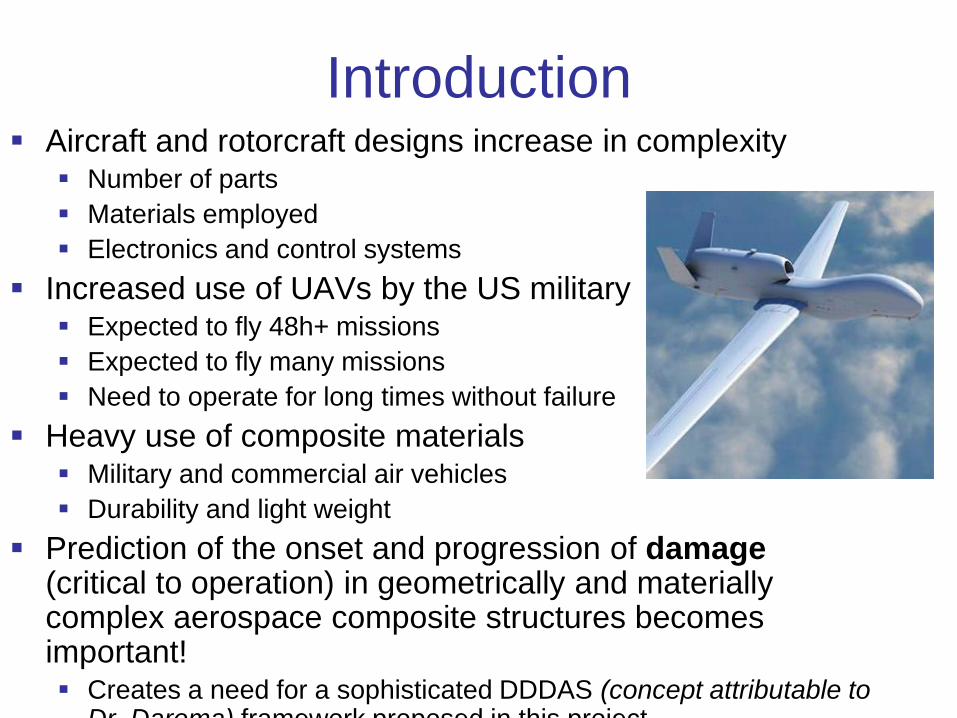
Introduction Aircraft and rotorcraft designs increase in complexity
Number of parts
Materials employed
Electronics and control systems
Increased use of UAVs by the US military Expected to fly 48h+ missions
Expected to fly many missions
Need to operate for long times without failure
Heavy use of composite materials Military and commercial air vehicles
Durability and light weight
Prediction of the onset and progression of damage (critical to operation) in geometrically and materially complex aerospace composite structures becomes important! Creates a need for a sophisticated DDDAS (concept attributable to
Dr. Darema) framework proposed in this project
Why DDDAS? Data coming from sensors alone is, in general, insufficient
to make predictions about damage Realistic data coming from an engineering system of interest (+)
Limited to a relatively small number of spatial points (-)
Data on quantities that are not directly linked to failure (-)
Data coming from computational models alone is, in general, insufficient to make predictions about damage Rich, 3D, time-dependent data set (+)
Access to quantities directly related to local damage (+)
Many assumptions about geometry, materials, constitutive models, BCs, ICs, etc., are (often crude!) approximations of reality (-)
Advanced simulations informed by sensor and measurement data is the pathway to realistic predictions in general, and damage/failure prediction for specific structural systems of interest – key tenet of DDDAS.

Methodology:
Advanced modeling and simulation
Time-dependent, 3D complex geometry, non-linear
material behavior
Progressive and fatigue damage modeling in
composite materials
High-fidelity data outputs (stress and damage field
distributions)
Isogeometric Analysis (IGA) for structural mechanics
Efficiency, robustness and suitability for DDDAS
A full-scale 3D composite blade structure with built-in
structural defects
Verification and validation
Instrumented with ultrasonic sensor arrays, infrared
thermographic imaging, accelerometers, strain gauges.
Deployment of the DDDAS framework
Fatigue damage prediction using DDDAS
FSI modeling with nonmatching interfaces
Flexibility
Control using adjoint-based methods
GPU/OpenMP implementation for increased performance
Trailing Edge Adhesive Disbond (4” long disbond)
Shear web to Skin Adhesive Disbond (set of 3 different sizes, 0.5”, 1” and 2” diameter)
Skin to core delamination (set of 3 different sizes, 0.5”, 1” and 2” diameter)
Out-of-Plane Waviness (2 locations, same length, different thickness of waviness)
Trailing Edge Cracks (2-3” perpendicular from trailing edge)
In-plane Waviness (size unknown)
Resin Starved (size unknown)
1/2-thickness
Skin delamination (set of 3 different sizes, 0.5”, 1” and 2” diameter, at different depths)
Full thicknessBoxes not representative of actual size, only define approximate location
3 sizes Ø: 0.5, 1, 2”
IGA, Full-Scale Blade Structure,
Basic Model Validation, and DDDAS
Isogeometric Analysis (IGA) Hughes, Cottrell, and YB. First paper appeared in the Fall 2005
Based on technologies (e.g., NURBS, T-splines) from computational geometry used in:
Design (CAD)
Animation (CG)
Visualization (CG)
IGA = “Exact” geometry + the isoparametric concept in FEM
Includes standard FEA as a special case, but offers other possibilities:
Precise and efficient geometric modeling
Simplified mesh refinement
Superior approximation properties
Smooth basis functions
Integration of design and analysis
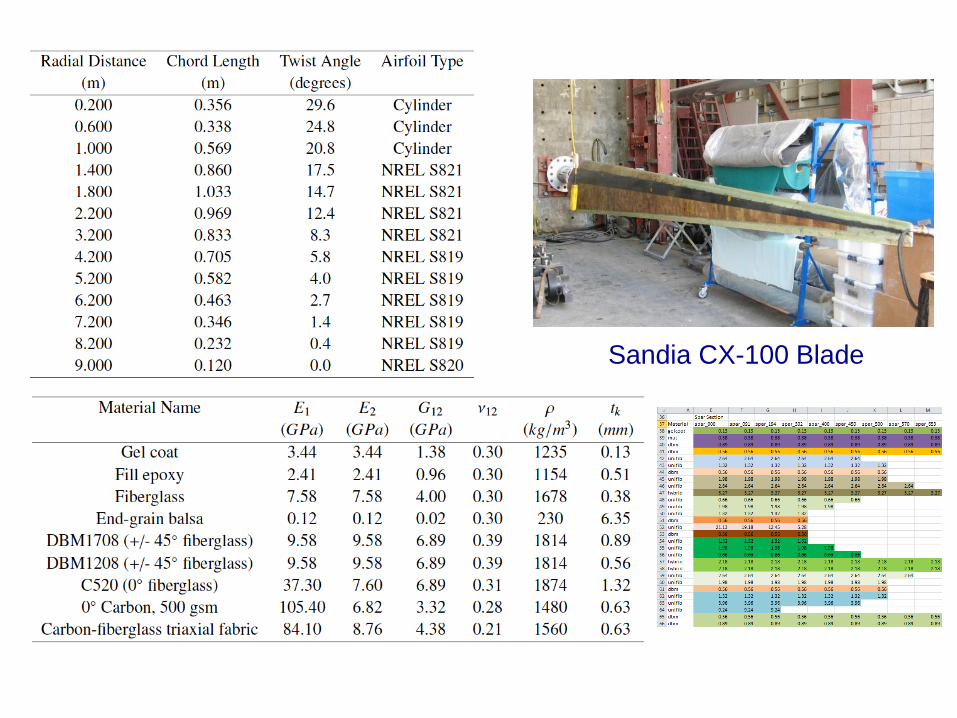
Sandia CX-100 Blade
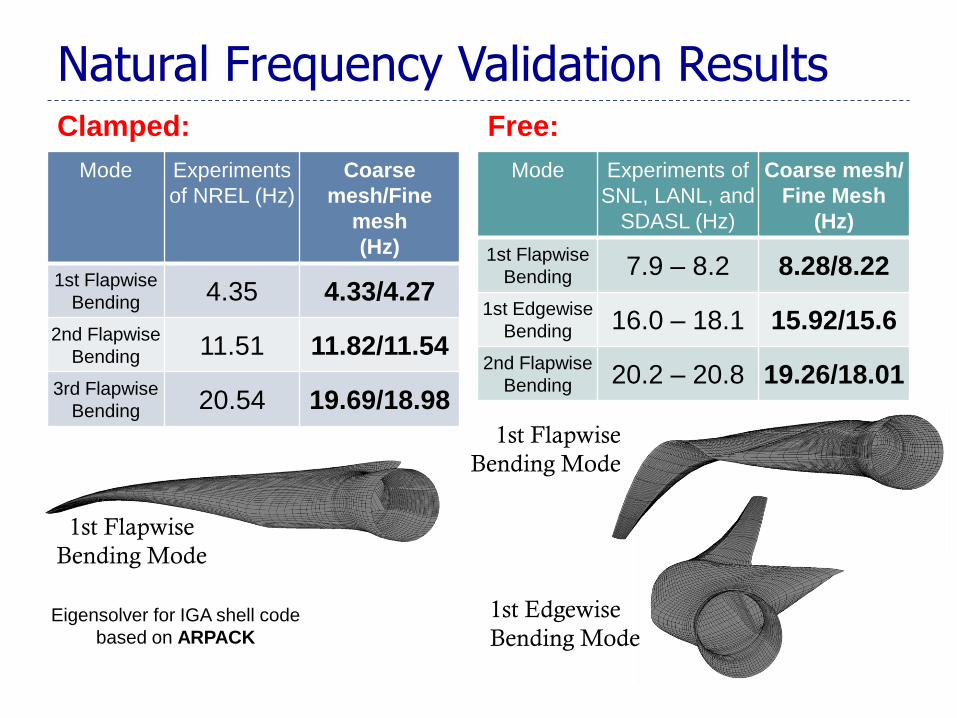
Natural Frequency Validation Results
Mode Experiments
of NREL (Hz)
Coarse
mesh/Fine
mesh
(Hz)
1st Flapwise
Bending 4.35 4.33/4.27
2nd Flapwise
Bending 11.51 11.82/11.54
3rd Flapwise
Bending 20.54 19.69/18.98
Mode Experiments of
SNL, LANL, and
SDASL (Hz)
Coarse mesh/
Fine Mesh
(Hz)
1st Flapwise
Bending 7.9 – 8.2 8.28/8.22
1st Edgewise
Bending 16.0 – 18.1 15.92/15.6
2nd Flapwise
Bending 20.2 – 20.8 19.26/18.01
Clamped: Free:
1st Flapwise
Bending Mode
1st Flapwise
Bending Mode
1st Edgewise
Bending Mode Eigensolver for IGA shell code
based on ARPACK
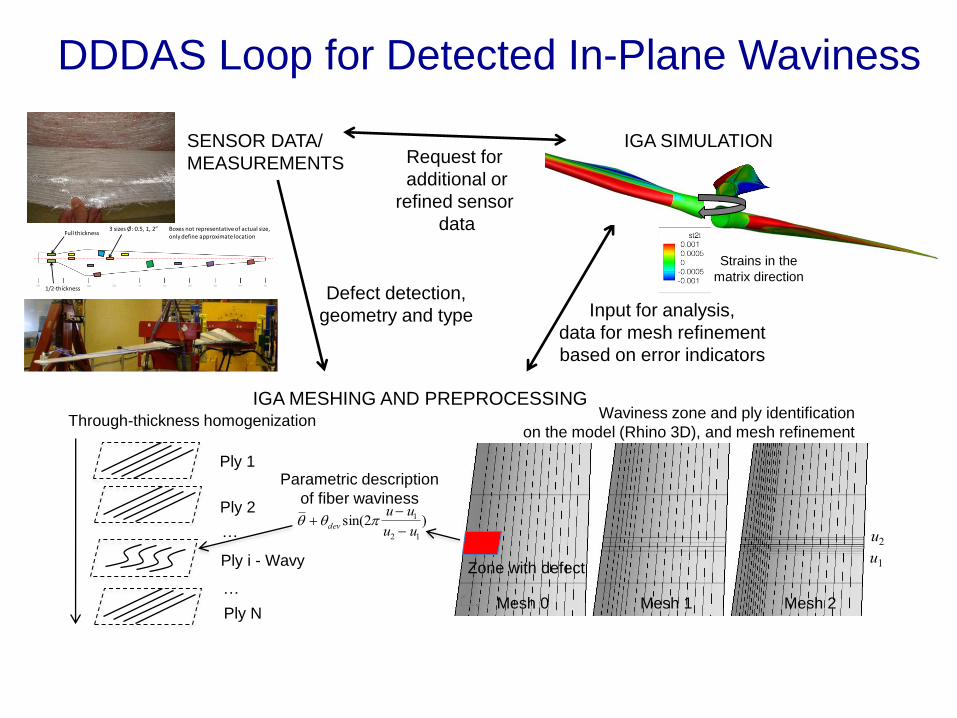
DDDAS Loop for Detected In-Plane Waviness
Ply 1
Ply 2
Ply i - Wavy
Ply N
…
…
Through-thickness homogenization
Mesh 0 Mesh 1 Mesh 2
dev sin(2u u1
u2 u1
)
u1
u2
Parametric description
of fiber waviness
Waviness zone and ply identification
on the model (Rhino 3D), and mesh refinement
Trailing Edge Adhesive Disbond (4” long disbond)
Shear web to Skin Adhesive Disbond (set of 3 different sizes, 0.5”, 1” and 2” diameter)
Skin to core delamination (set of 3 different sizes, 0.5”, 1” and 2” diameter)
Out-of-Plane Waviness (2 locations, same length, different thickness of waviness)
Trailing Edge Cracks (2-3” perpendicular from trailing edge)
In-plane Waviness (size unknown)
Resin Starved (size unknown)
1/2-thickness
Skin delamination (set of 3 different sizes, 0.5”, 1” and 2” diameter, at different depths)
Full thicknessBoxes not representative of actual size, only define approximate location
3 sizes Ø: 0.5, 1, 2”
SENSOR DATA/
MEASUREMENTS
IGA MESHING AND PREPROCESSING
IGA SIMULATION
Defect detection,
geometry and type
Zone with defect
Strains in the
matrix direction
Input for analysis,
data for mesh refinement
based on error indicators
Request for
additional or
refined sensor
data
Modeling of Damage in Large-Scale
Composite Structures: Progressive and Fatigue Damage Modeling

Damage in Composite Lamina & Laminates
Four failure modes considered here: • Fiber rupture in
longitudinal tension;
• Fiber buckling and kinking in longitudinal compression;
• Matrix cracking under in-plane transverse tension and shear;
• Matrix crushing under in-plane transverse compression and shear.
Failure modes of Composites (Courtesy of P. Camannho et al.)
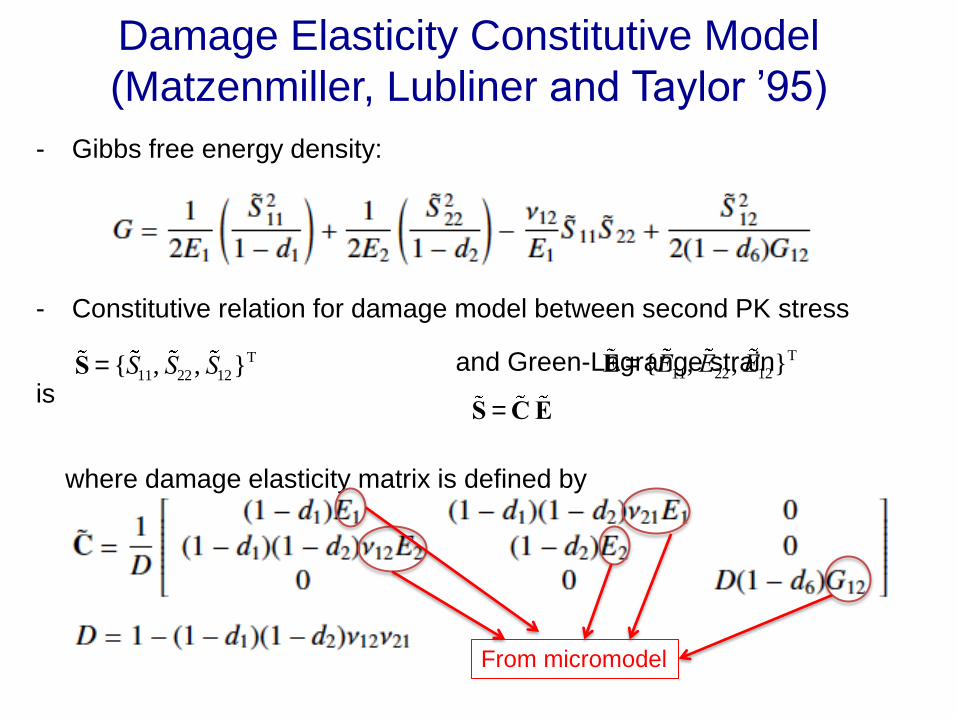
Damage Elasticity Constitutive Model
(Matzenmiller, Lubliner and Taylor ’95)
- Gibbs free energy density:
- Constitutive relation for damage model between second PK stress
and Green-Lagrange strain is
where damage elasticity matrix is defined by From micromodel
S = {S11, S22, S12}T
E = {E11, E22, E12}T
S =CE
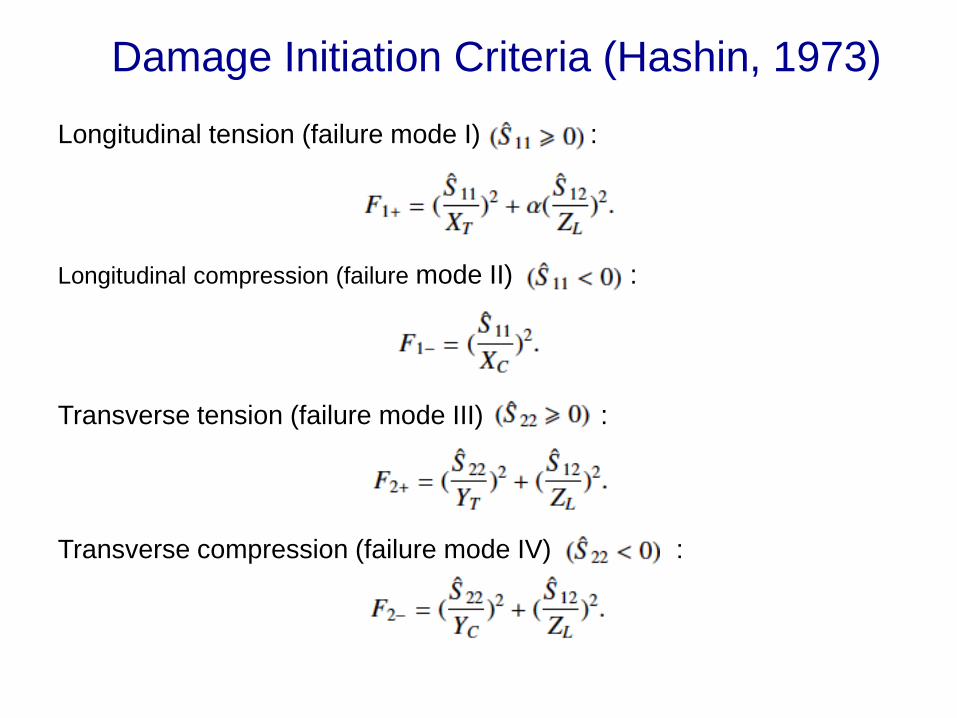
Damage Initiation Criteria (Hashin, 1973)
Longitudinal tension (failure mode I) :
Longitudinal compression (failure mode II) :
Transverse tension (failure mode III) :
Transverse compression (failure mode IV) :
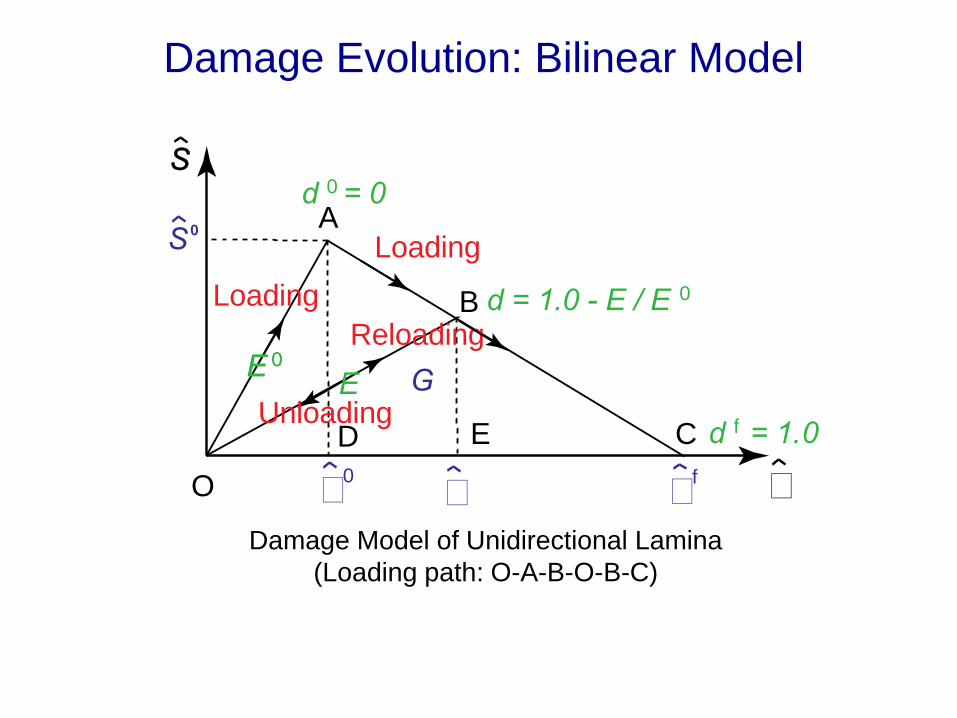
Damage Evolution: Bilinear Model
Damage Model of Unidirectional Lamina
(Loading path: O-A-B-O-B-C)
δ
Loading
Unloading
Loading
Reloading
O
A
B
C
S
0EE
0d = 0
fd = 1.0
0d = 1.0 - E / E
G 0E
0δ
fδ
δ
ED
0
S
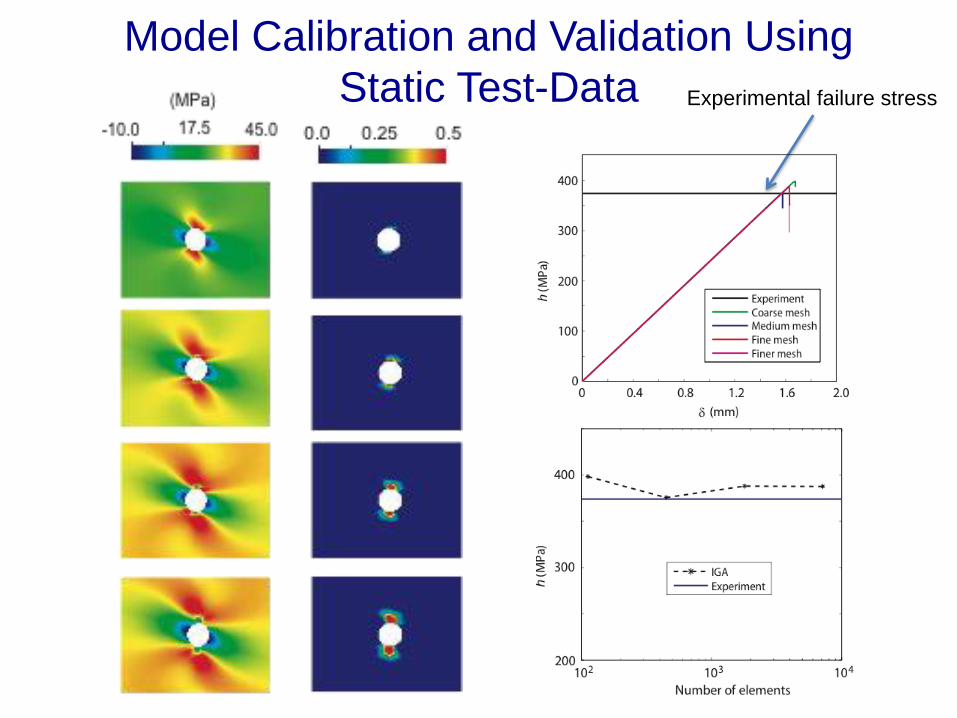
Experimental failure stress
Model Calibration and Validation Using
Static Test-Data
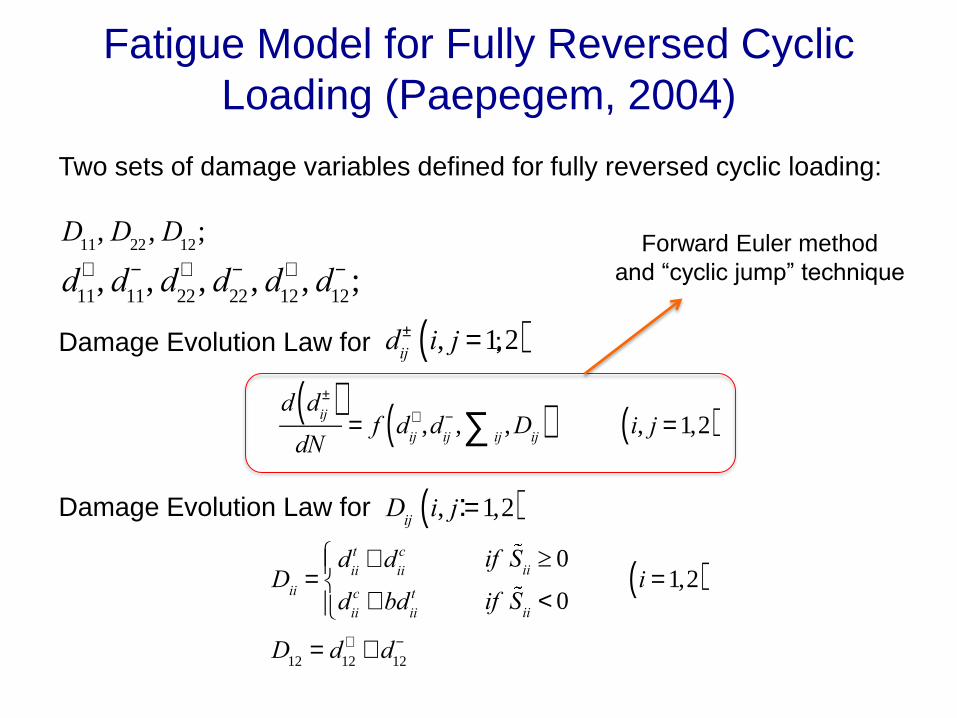
Two sets of damage variables defined for fully reversed cyclic loading:
Damage Evolution Law for :
Damage Evolution Law for :
d dij
±( )dN
= f dij
+ ,dij
- ,ij, D
ijå( ) i, j = 1,2( )
d
ij
± i, j = 1,2( )
D
iji, j = 1,2( )
Dii
=d
ii
t + dii
c
dii
c + bdii
t
ìíï
îï
if Sii³ 0
if Sii
< 0i = 1,2( )
D12
= d12
+ + d12
-
d
11
+ , d11
- , d22
+ , d22
- , d12
+ , d12
- ; D
11, D
22, D
12;
Fatigue Model for Fully Reversed Cyclic
Loading (Paepegem, 2004)
Forward Euler method
and “cyclic jump” technique
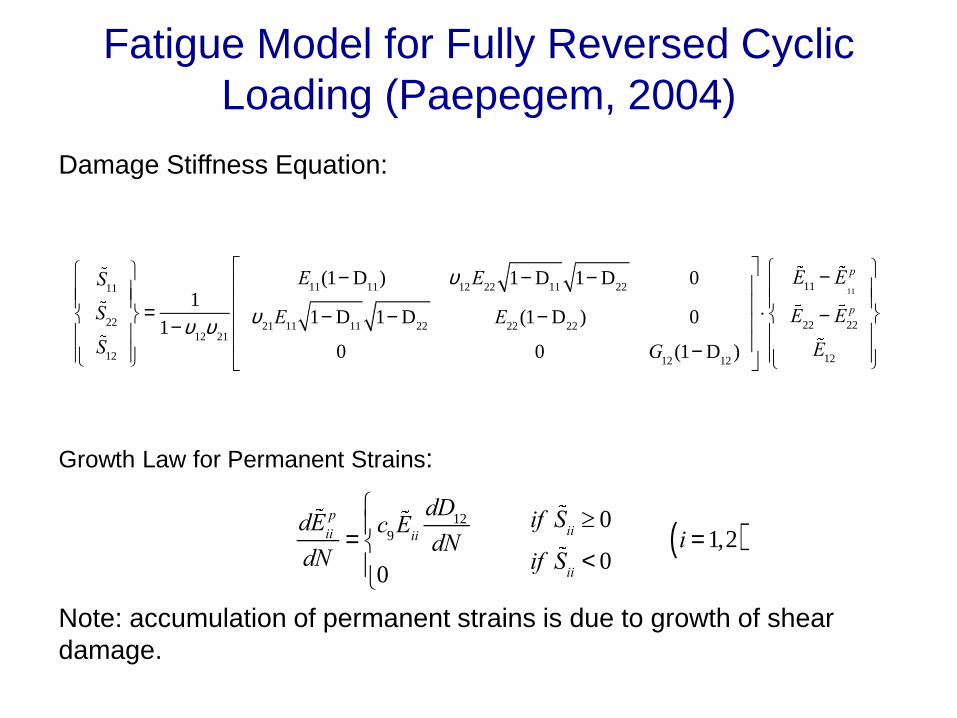
Damage Stiffness Equation:
Growth Law for Permanent Strains:
Note: accumulation of permanent strains is due to growth of shear
damage.
dEii
p
dN=
c9E
ii
dD12
dN
0
ì
íï
îï
if Sii³ 0
if Sii
< 0i = 1,2( )
S11
S22
S12
ì
í
ïï
î
ïï
ü
ý
ïï
þ
ïï
=1
1-u12u
21
E11
(1- D11
) u12
E22
1- D11
1- D22
0
u21
E11
1- D11
1- D22
E22
(1- D22
) 0
0 0 G12
(1- D12
)
é
ë
êêêê
ù
û
úúúú
×
E11
- E11
p
E22
- E22
p
E12
ì
í
ïï
î
ïï
ü
ý
ïï
þ
ïï
Fatigue Model for Fully Reversed Cyclic
Loading (Paepegem, 2004)
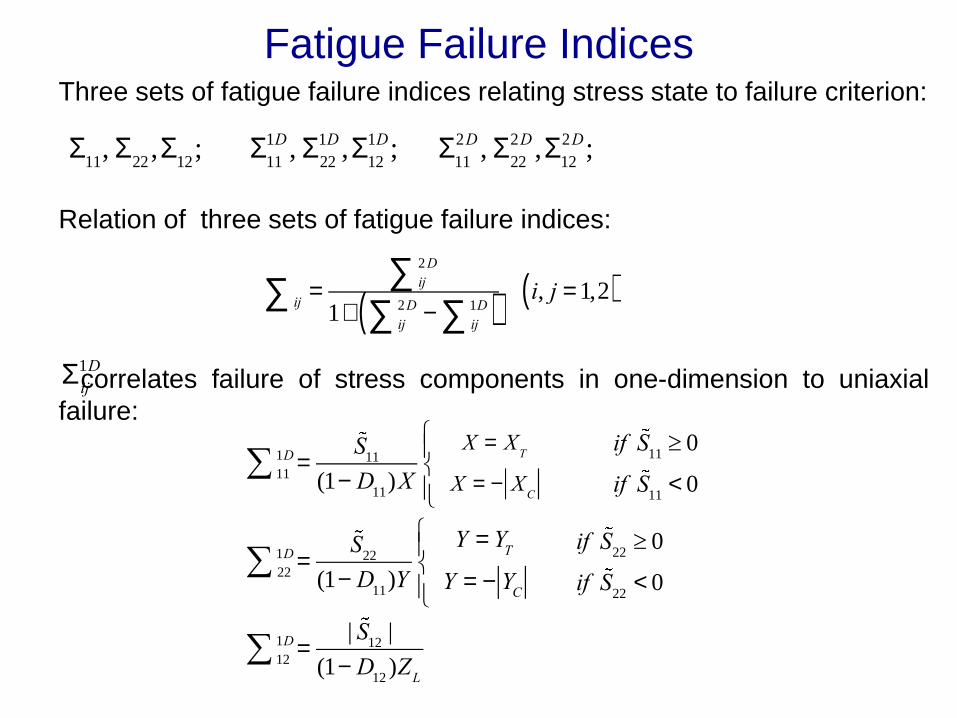
Fatigue Failure Indices Three sets of fatigue failure indices relating stress state to failure criterion:
Relation of three sets of fatigue failure indices:
correlates failure of stress components in one-dimension to uniaxial
failure:
ijå =ij
2 Då1+
ij
2Då -ij
1Då( )i, j = 1,2( )
S
11, S
22,S
12;
S
11
1D , S22
1D ,S12
1D; S
11
2D , S22
2D ,S12
2D;
11
1D =S
11
(1- D11
)Xå
X = XT
X = - XC
ì
íï
îï
if S11³ 0
if S11
< 0
22
1D =S
22
(1- D11
)Yå
Y = YT
Y = - YC
ì
íï
îï
if S22³ 0
if S22
< 0
12
1D =| S
12|
(1- D12
)ZL
å
S
ij
1D

correlates stress components in two-dimensional case to Tsai-Wu in-
plane failure surface:
1
XT
-1
XC
æ
èç
ö
ø÷
S11
11
2 D (1- D11
)å+
1
YT
-1
YC
æ
èç
ö
ø÷
S22
1- D22
+1
XT
XC
S11
11
2 D (1- D11
)å
æ
èç
ö
ø÷
2
+1
YT
YC
S11
1- D22
æ
èç
ö
ø÷
2
+1
ZL
2
S12
1- D12
æ
èç
ö
ø÷
2
= 1
1
XT
-1
XC
æ
èç
ö
ø÷
S11
1- D11
+1
YT
-1
YC
æ
èç
ö
ø÷
S22
22
2 D (1- D22
)å+
1
XT
XC
S11
1- D11
æ
èç
ö
ø÷
2
+1
YT
YC
S22
22
2 D (1- D22
)å
æ
èç
ö
ø÷
2
+1
ZL
2
S12
1- D12
æ
èç
ö
ø÷
2
= 1
1
XT
-1
XC
æ
èç
ö
ø÷
S11
1- D11
+1
YT
-1
YC
æ
èç
ö
ø÷
S22
1- D22
+1
XT
XC
S11
1- D11
æ
èç
ö
ø÷
2
+1
YT
YC
S22
1- D22
æ
èç
ö
ø÷
2
+1
ZL
2
S12
12
2 D (1- D12
)å
æ
èç
ö
ø÷
2
= 1
S
ij
2 D
Fatigue Failure Indices
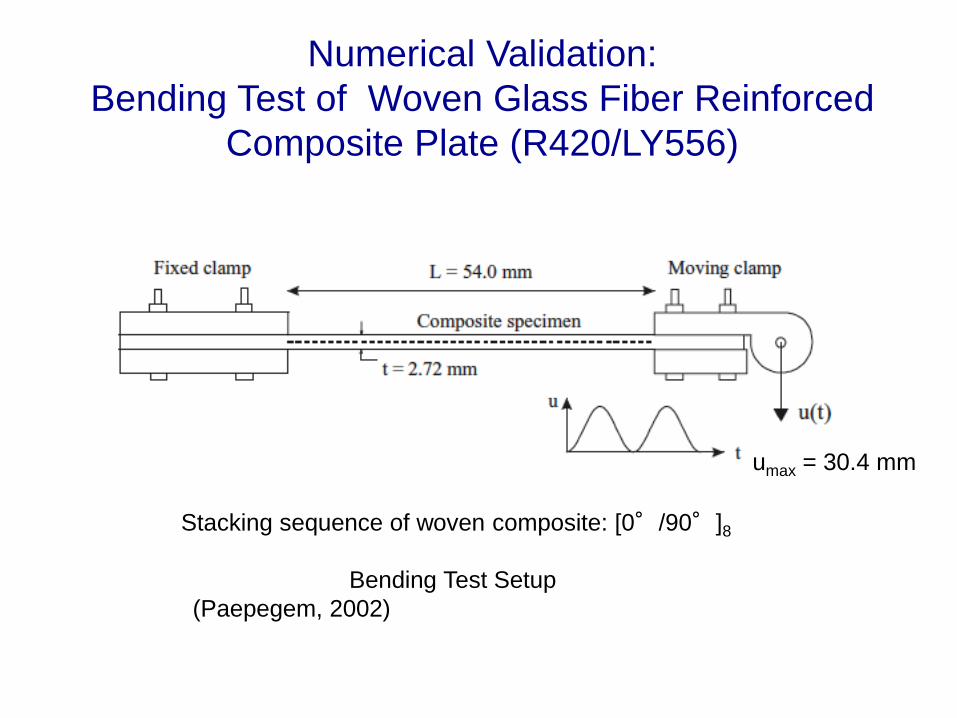
Numerical Validation:
Bending Test of Woven Glass Fiber Reinforced
Composite Plate (R420/LY556)
Stacking sequence of woven composite: [0°/90°]8
Bending Test Setup
(Paepegem, 2002)
umax = 30.4 mm

Material Properties of Woven Composite Lamina
E11
(GPa)
E22
(GPa) ν12
G12
(GPa)
24.57 23.94 0.153 4.83
Measured in-plane elastic properties of
woven composite lamina [0°/90°]
Xt
(MPa)
Xc
(MPa)
Yt
(MPa)
Yc
(MPa)
ZL
(Mpa)
390.7 345.1 390.7 345.1 100.6
Measured in-plane static strengths of
woven composite lamina [0°/90°]
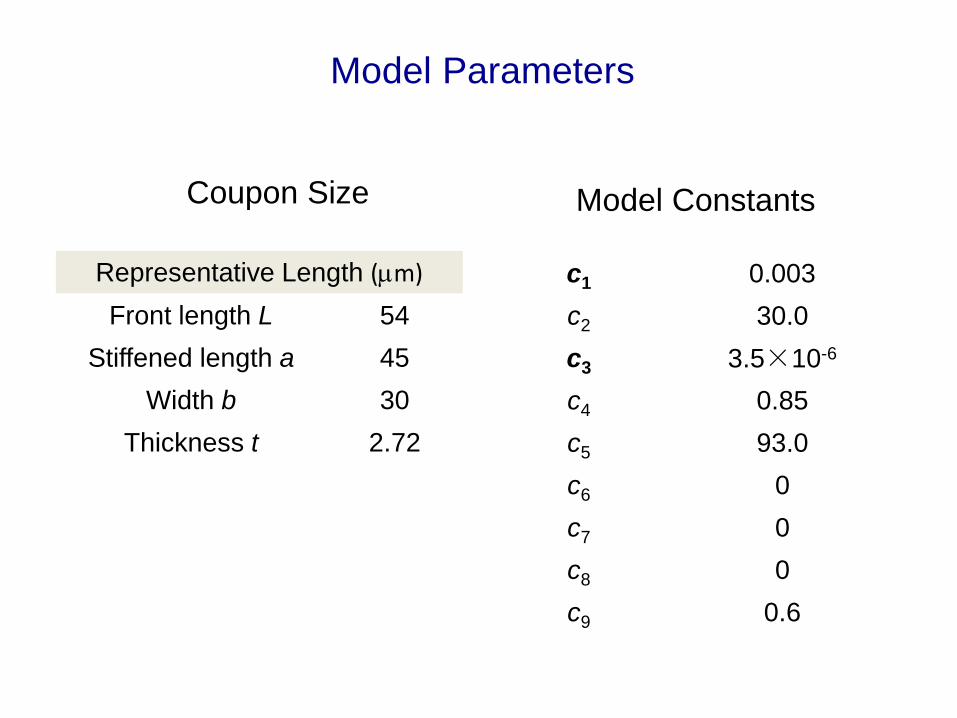
Model Parameters
Coupon Size
Representative Length (mm)
Front length L 54
Stiffened length a 45
Width b 30
Thickness t 2.72
Model Constants
c1 0.003
c2 30.0
c3 3.5×10-6
c4 0.85
c5 93.0
c6 0
c7 0
c8 0
c9 0.6
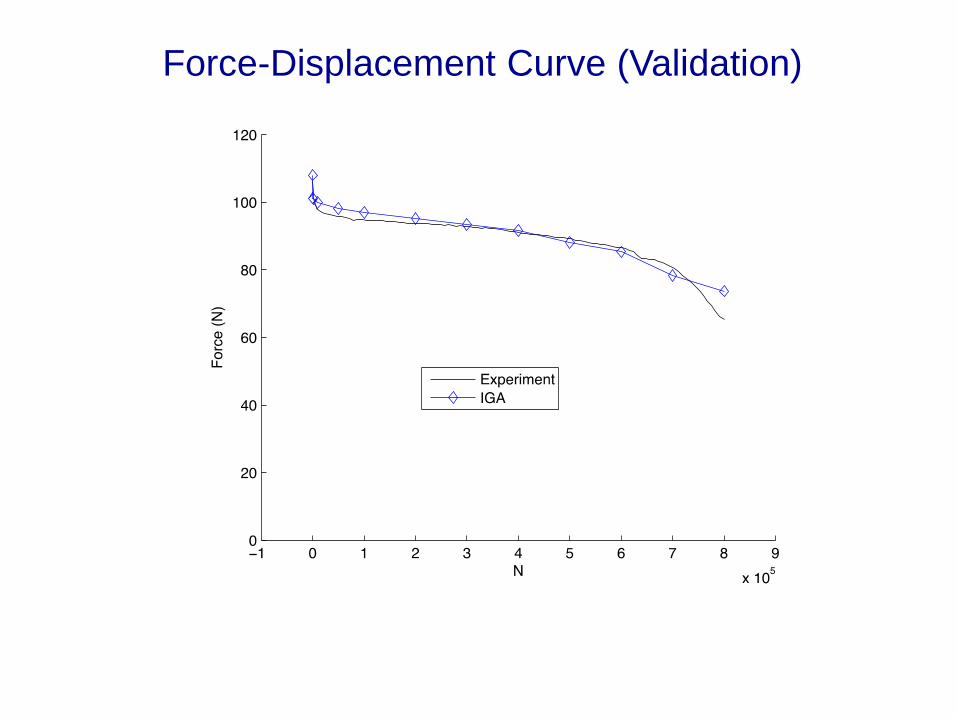
Force-Displacement Curve (Validation)
DDDAS for Full-Scale Blade Fatigue Test (work with Drs. Stuart Taylor (LANL) and
Michael Todd (UCSD), fatigue experiment done at NREL)
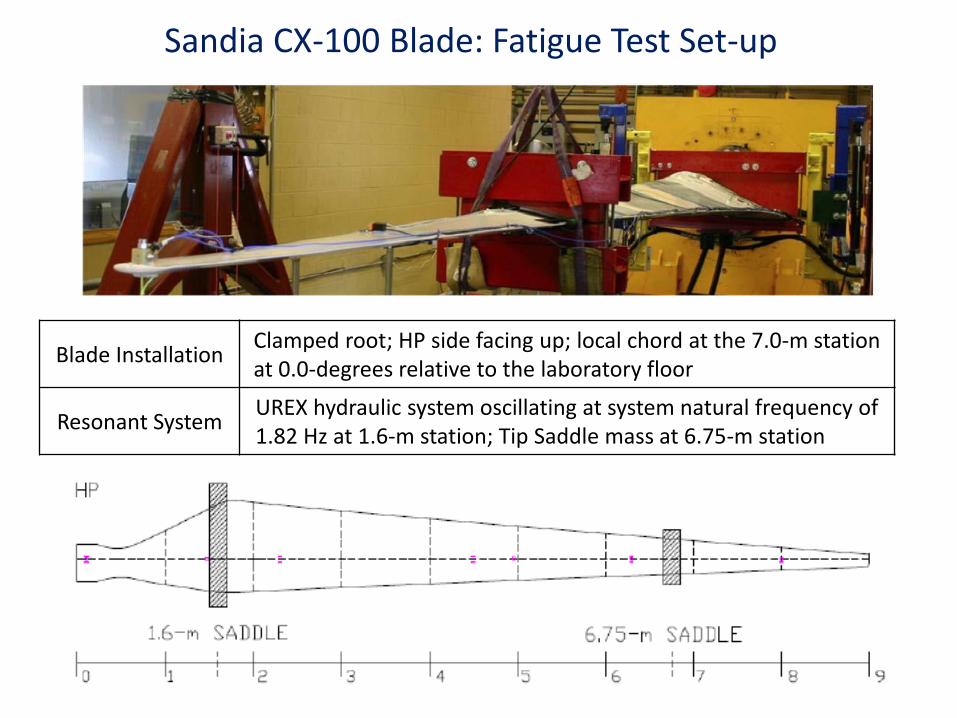
Sandia CX-100 Blade: Fatigue Test Set-up
Blade Installation Clamped root; HP side facing up; local chord at the 7.0-m station at 0.0-degrees relative to the laboratory floor
Resonant System UREX hydraulic system oscillating at system natural frequency of 1.82 Hz at 1.6-m station; Tip Saddle mass at 6.75-m station
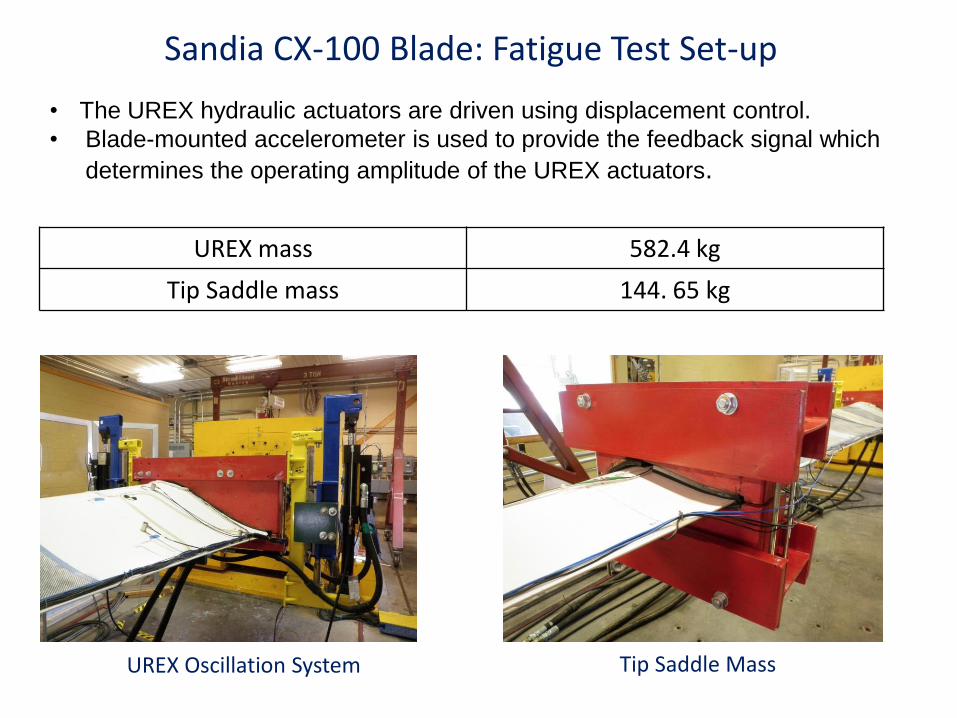
UREX Oscillation System Tip Saddle Mass
UREX mass 582.4 kg
Tip Saddle mass 144. 65 kg
• The UREX hydraulic actuators are driven using displacement control.
• Blade-mounted accelerometer is used to provide the feedback signal which
determines the operating amplitude of the UREX actuators.
Sandia CX-100 Blade: Fatigue Test Set-up
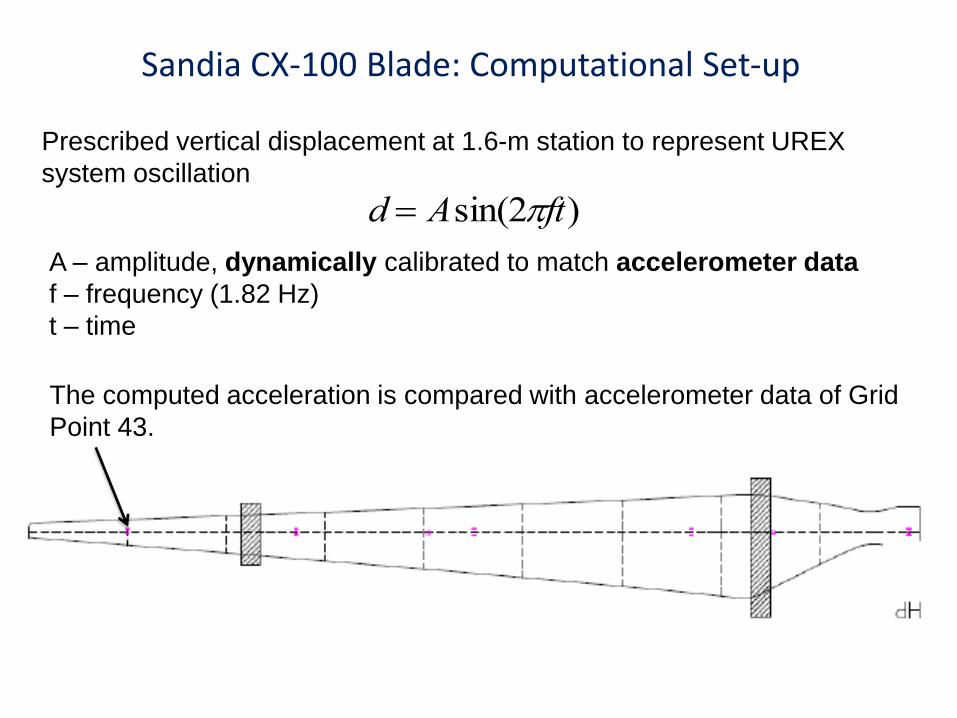
Sandia CX-100 Blade: Computational Set-up
d Asin(2ft)
Prescribed vertical displacement at 1.6-m station to represent UREX
system oscillation
A – amplitude, dynamically calibrated to match accelerometer data
f – frequency (1.82 Hz)
t – time
The computed acceleration is compared with accelerometer data of Grid
Point 43.
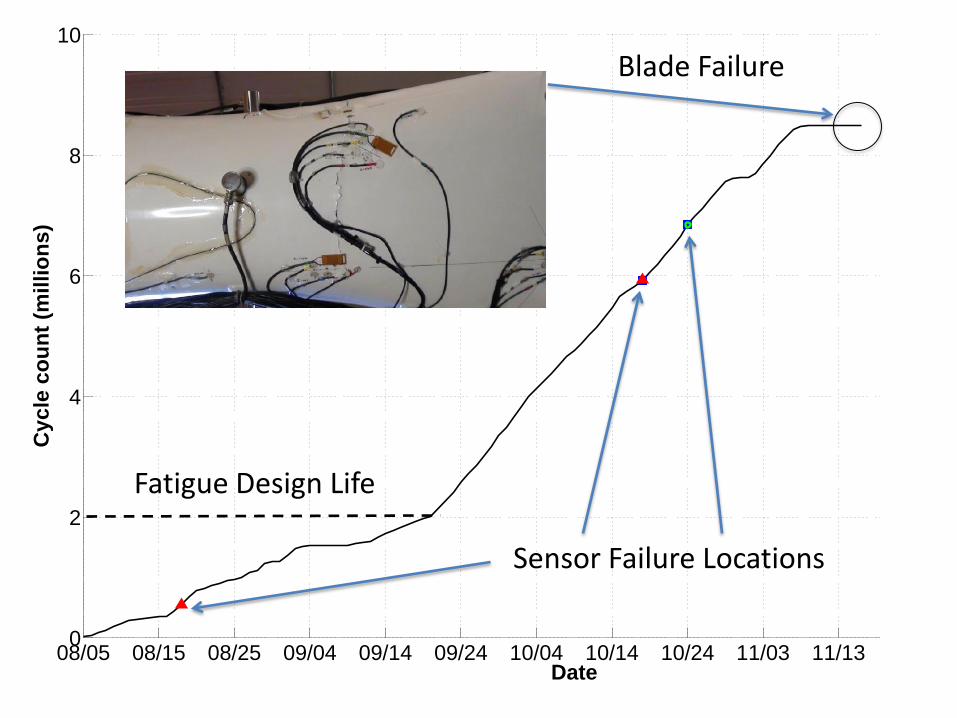
08/05 08/15 08/25 09/04 09/14 09/24 10/04 10/14 10/24 11/03 11/13 08/05 08/150
2
4
6
8
10
Date
Cy
cle
co
un
t (m
illio
ns
)
Sensor Failure Locations
Blade Failure
Fatigue Design Life
Artem’s Movie
Outlook: DDDAS in the Presence of Fluid-
Structure Interaction

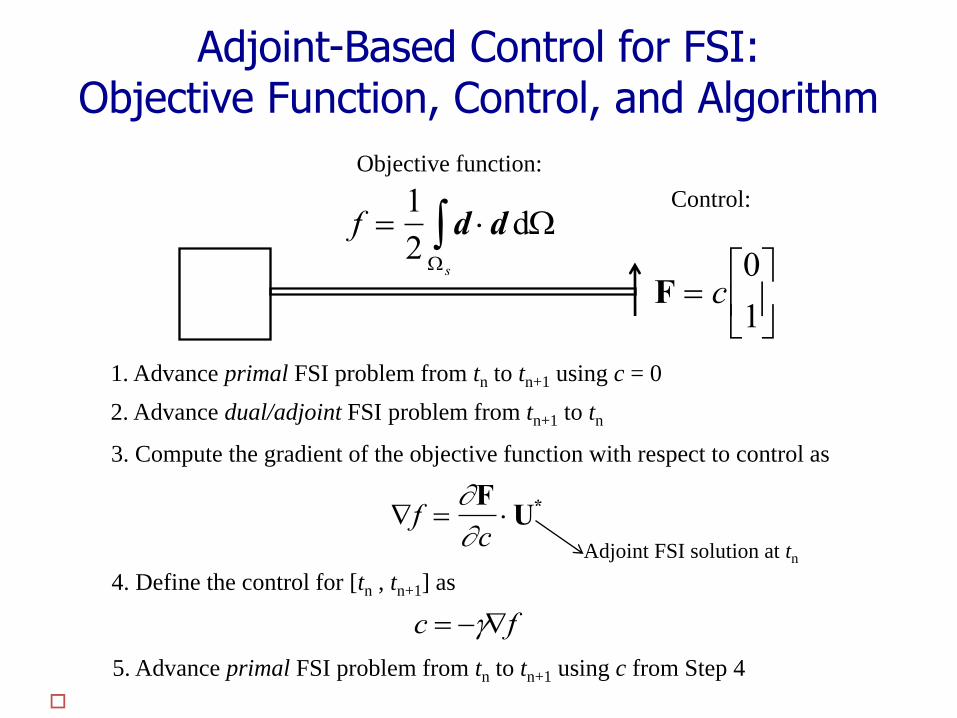
F c0
1
f 1
2d d
s
d
Objective function:
Control:
1. Advance primal FSI problem from tn to tn+1 using c = 0
2. Advance dual/adjoint FSI problem from tn+1 to tn
3. Compute the gradient of the objective function with respect to control as
f F
cU*
Adjoint FSI solution at tn
4. Define the control for [tn , tn+1] as
c f
5. Advance primal FSI problem from tn to tn+1 using c from Step 4
Adjoint-Based Control for FSI: Objective Function, Control, and Algorithm
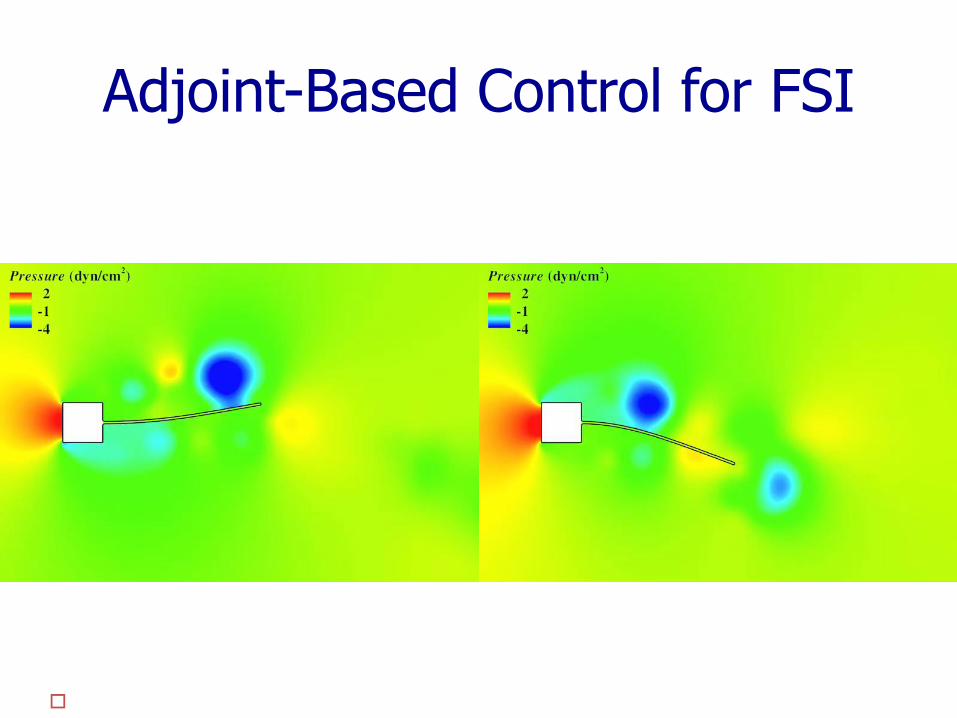
Adjoint-Based Control for FSI
Acknowledgements
AFOSR Award FA9550-12-1-0005, Dr. Frederica
Darema, award monitor
HPC resources provided by TACC and SDSC
Thank You!!!