A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench

of 11
Transcript of A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
1/11
400 Commonwealth Drive, Warrendale, PA 15096-0001 U.S.A. Tel: (724) 776-4841 Fax: (724) 776-0790 Web: www.sae.org
SAE TECHNICALPAPER SERIES 2008-01-0630
A 6-Speed Automatic Transmission PlantDynamics Model for HIL Test Bench
Quan Zheng, Asif Habeebullah, Woowon Chung and Andrew HermanDelphi Corporation
Reprinted From: Transmission and Driveline, 2008(SP-2147)
2008 World CongressDetroit, MichiganApril 14-17, 2008
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
2/11
By mandate of the Engineering Meetings Board, this paper has been approved for SAE publication uponcompletion of a peer review process by a minimum of three (3) industry experts under the supervision ofthe session organizer.
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, ortransmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise,
without the prior written permission of SAE.For permission and licensing requests contact:
SAE Permissions400 Commonwealth DriveWarrendale, PA 15096-0001-USAEmail: [email protected]: 724-772-4028Fax: 724-776-3036
For multiple print copies contact:
SAE Customer ServiceTel: 877-606-7323 (inside USA and Canada)Tel: 724-776-4970 (outside USA)Fax: 724-776-0790Email: [email protected]
ISSN 0148-7191Copyright 2008 SAE InternationalPositions and opinions advanced in this paper are those of the author(s) and not necessarily those of SAE.The author is solely responsible for the content of the paper. A process is available by which discussionswill be printed with the paper if it is published in SAE Transactions.
Persons wishing to submit papers to be considered for presentation or publication by SAE should send themanuscript or a 300 word abstract of a proposed manuscript to: Secretary, Engineering Meetings Board, SAE.
Printed in USA
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
3/11
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
4/11
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
5/11
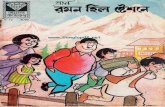
Figure 2 HIL Bench Architecture
6-SPEED AUTOMATIC TRANSMISSION PLANTDYNAMICS MODEL
Powertrain dynamics modeling has been an activeresearch and development field for many years. Ingeneral, a complete powertrain model hasrepresentations of engine, torque converter,transmission, and driveline/ vehicle dynamics.Depending on the application, the powertrain model mayhave different levels of complexity for a certain part ofthe powertrain model. For example, if the emphasis is onengine applications, then the engine model may be ofhigh-fidelity. Similarly, for chassis applications, thevehicle dynamics model is very detailed.
In our case, the motivation for the development ofautomatic transmission plant model is to enable thealgorithm/test engineer(s) to check the controllerperformance with a representative transmission plantmodel in the absence of the real transmission hardware.The powertrain plant dynamics model is a key element ofthe Virtual Car Test Bench as shown in Figure 1, whichrequires a powertrain model with high-fidelity
representation of the transmission dynamics. SuchVirtual Car Test Bench is used for controller andsoftware testing, control algorithm development andtesting.
The initial model is developed by starting with anexample SimDriveline model from the MathWorks. Thismodel represents the major components of the drive-train (engine, torque converter, transmission, and vehicleload) by specialized blocks from the SimDriveline block-set of the Simulink library.
The 6-speed AT mechanical model is then configuredusing SimDriveline toolbox building blocks. Unlike theconventional modeling approach of deriving thetransmission dynamics state equations and transitions,SimDriveline toolbox offers components with built in stateequations and transition conditions. Therefore, the statetransitions and boundary conditions are taken care of bythe physical model.
Table 1 shows the clutch state table for the 6-speedautomatic transmission of interest. Figure 3 shows thepowertrain model developed using SimDriveline toolbox.
The model parameters of various blocks are updated toreflect the vehicle design parameters. The engine speed-torque map, the torque converter parameters (speed andtorque ratios, capacity factor), transmission gear ratios,clutch design parameters, transmission inertias, the finaldrive gear ratio, the vehicle inertia and the road-loadvalues. The model also uses certain parameters that arenot readily available due to the lack of proprietary designinformation. These parameters are tuned in an iterativefashion and this is found to be an arduous process. The
key transmission dynamics model parameters are tunedby inputting the actual vehicle engine speed in the model.The modeled transmission input speed and output speedare then compared with vehicle data.
The powertrain model is developed with the followingstages to deliver different levels of model fidelity at eachstage:
Stage 1: Develop and validate 6-speed AT mechanicalmodel.
TestDrive
Host PCwith
TestDriveConsole
M-Node
TCM
Laptop withINCA
PRNDL
Throttle
Brake
TFT
Outputs
Inputs Sensors
T h r o
t t l e
B r ak
e
G e ar
T F T
T I S
S
T O S S
V K P H
CAN bus
Solenoid currents
C C P
Actuators
Gear PWM
S ol en
oi d
c ur r en
t s
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
6/11
Stage 2: Develop and validate the hydraulic pressuregeneration model
Stage 3: Validate vehicle dynamics model
Stage 4: Develop and validate engine model to haveproper torque generation.
This staged development process enables us to focus onthe key modules needed for controller and softwaretesting purpose, and at the same time, the modeldevelopment is continued to improve the model fidelity ofother modules.
D6
1 Used for engine braking when on.
D5
D4
D3
D2
1
D1
R
F1CBLR
LR/BC26C35R
C456
OD
C1234
UD
D6
1 Used for engine braking when on.
D5
D4
D3
D2
1
D1
R
F1CBLR
LR/BC26C35R
C456
OD
C1234
UD
Table 1 Clutch state table of 6-Speed AT
Figure 3 Drive-train Plant Model
6-SPEED AT MODEL VALIDATION
The automatic transmission model is validated by vehicledata.
One challenge of the model development is the tuning ofthe model parameters. The original design parametersare limited, and are sometime proprietary. Therefore,model parameter identification and tuning becomes animportant task. Another challenge of the modeldevelopment is that a detailed engine dynamics model isnecessary to fine tune the transmission dynamicsresponse.
The focus of the model is on the transmission dynamics.Therefore, actual measured vehicle data is used to tunethe transmission model parameters. In this case,
measure engine speed is used as input to the powertrainmodel. The modeled transmission input speed iscompared with the measure transmission input speed.
Another source of variation is the vehicle loading on theoutput shaft of the transmission. There are several stepsto develop a set of representative parameters for vehicleloading. After the load model is derived, the simulatedoutput speed is compared with the measured outputspeed.
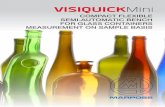
Figure 4 - Figure 6 show the model validation results.These results are organized by recording signals from atypical test vehicle driven under selected drivingconditions (this constitutes the test-data), running themodel with its inputs being driven from the test-data andcomparing the model outputs against the test-dataoutputs.
Figure 4 shows the vehicle data of throttle, brake andgear requests, which are inputs to the model. Figure 5shows the engine speed and engine torque traces. Theengine torque graph shows the comparison enginetorque calculated by model and the data taken fromvehicle. It is obvious that engine model needs additionalimprovements. For our model validation purpose, enginespeed is fed into the powertrain model usingSimDriveline speed input block. This allows us to focuson transmission dynamics directly without focusingheavily on the fidelity of engine model. Figure 6 showsthe comparison of transmission input speed (TISS),transmission output speed (TOSS) and vehicle speedcalculated by the model and measured from vehicle. Asshown in Figure 6, the model and vehicle data show aclose correspondence for the most part with thetransmission up-shifts and down-shifts. However, there
are a few areas that the speed levels of modeled andmeasured data do not line up. This is due to the vehicleloading part of the model being not accurate. This is partof our future work to improve the vehicle dynamics modelin order to add proper loading to the transmission.
0 50 100 150 200 250 3000
20
40
T h r o
t t l e
ModelVehicle data
0 50 100 150 200 250 300-2
0
2x 10
4
B r a
k e
ModelVehicle data
0 50 100 150 200 250 3000
5
10
G e a r r e q u e s
t
Time (secs)
ModelVehicle data
Figure 4 Model (User) Inputs
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
7/11
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
8/11
Command Current Control Pressure
Closed Loop Plant Model
Clutch Braking Force= uFF=P*A
Generate TOSS,TISS and VRPMrelation
Figure 8 Current, Pressure and Closed Loopstructure
As pointed out earlier, engine RPM signal needs to befed to the plant model because a validated high fidelityengine plant dynamics model is not yet available at thisstage of development. Engine torque is estimated byusing measured engine speeds.
CONTROL ALGORITHM TESTING
The new generation of Delphi's transmission controlmethodology is to provide the customer with the bestcalibration authority. This means that transmissioncontrol can be achieved by very general calibrationsetting. For those familiar with the art of transmissioncontrols, a key point of the art is to properly controltransmission actuators at each phase of shifting process.
In order to test this new generation of transmissioncontrol strategy, closed loop test bench is a necessity.An example of the testing needs is given below.
One important aspect of transmission shift control is toproperly determine the shift progress, i.e. shift phases.For the apply and release clutch phase transitions, phaseduration time is used as well as certain event triggers,such as Shift Begin, Shift Finish, etc. As shown in Figure9, during 1->2 power off shifting, Apply1 Clutch SYRpoint can be set to true by model the HIL bench.Therefore, the phase transition algorithm can be verified.
Figure 9 Example Power off 1->2 shift
PLAY BACK MODE
Play Back Mode is an important function of the HILVirtual Car bench. Play Back enables test engineers toplayback test data repeatedly to test certain areas ofcontroller functionality. This functionality also allows datacollected in a test vehicle or dyno to be repeated, whichis important to reproduce errors that are difficult,damaging or maybe even dangerous in a test vehicle(Zheng, et al., 2007).
The concept of Play Back Mode is to make HIL testbench re-produce the recorded (vehicle) signalsrepeatedly, i.e. to re-create the vehicle test scenario onthe test bench.
In this section, we will detail the data capture methodusing production vehicle calibration tools to re-createconditions in the HIL environment similar to vehicleconditions.
Since the bench model is running in Matlab environment,it is necessary to convert all data file to this Matlab .matdata format. Figure 10 shows the process of data formatconversion, which can be summarized at the followingsteps:
Collect input signals to TCM using productionvehicle calibration tool;
Convert .dat file to Matlab .mat format(mdfimport developed by Mathworks, Figure 12);
Convert data to the right format (loop rate, row,column, etc.)
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
9/11
Vehicle test data(*.dat) mat file
mdfimport
Time align as 5ms andRow ,column changeSave as mat file
Run model 5 ms step By conversion m fileDeveloped by Delphi
Figure 10 Data format conversion
Figure 11 Input signals to the TCM
Figure 11 shows input signals to the TCM that arenecessary for the proper transmission control. In thiscase, TCM uses CAN for Eng related signal sharing,which are the necessary input to the model as well.
Figure 12 shows MDFIMPORT program used to convertthe recorded vehicle data (*.dat) to Matlab data format.
Figure 12 MDFIMPORT program developed byMathworks
Figure 13 shows data comparison between input andoutput data. Here the compared data are TISS, TOSSand VRPM. B* represents bench generated signal. Asshown, the Play Back Mode data matches the vehicledata very well.
Figure 14 shows the comparison of solenoid currentgenerated on the bench and vehicle compared result,where variables AUTCURA (26Brake), AUTCURB(UD),AUTCURD(35R) and AUTCURE(OD) represent solenoidcontrol current (from 0 to 850mA), and B* representbench test result with mat conversion. As shown in thefigure, the two sets of data match very well, which meansthat same outputs from TCM can be expected via PlayBack Model.
In summary, Play Back Mode feature allows testengineers to replay vehicle test data on the HIL benchrepeatedly, which is not possible by human driving a car.Therefore, Play Back Mode makes it easier to find theroot cause of a problem and eventually fix the problem.
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
10/11
0
500
1000
1500
2000
2500
3000
0 50 100 150
BVTINSPDF
VTINSPDF
0
500
1000
1500
2000
2500
3000
0 50 100 150
BVOUTSPDF
VOUTSPDF
0
500
1000
1500
2000
2500
3000
0 50 100 150
BVRPMVRPM
Figure 13 VTINSPDF (TISS), VOUTSPDF (TOSS) andVRPM
-100
0
100200
300
400500
600
700
800
900
106 111
BAUTCURA
BAUTCURB
BAUTCURD
BAUTCURE
AUTCURA
AUTCURB
AUTCURD
AUTCURE
Figure 14 Compared result
FUTURE DEVELOPMENT
The above described 6 Speed HIL environment offersthe ability to evaluate real-world data against previouslydiscussed model. The extensions of this capability willfollow primary paths. Below are the areas of focus forfuture development:
1. Increased model fidelity, addressing the following:
Add vehicle dynamics to the model by modelinga differential, longitudinal car dynamics and tires.
Exercise the current to pressure generationportion (already available in the model) so that itproduces the clutch pressures for thetransmission clutches.
Add a hydraulic plant to model the transmissionhydraulics; SimHydraulics physical modelingblock-set could be utilized for this purpose.
Use Simulink Parameter Estimation todynamically tune the model parameters tofurther refine performance.
Improved Engine model
2. Increased TCM HW and SW Test Coverage (itemsdescribed in the INTRODUCTION not addressed inthis paper):
Increased test coverage for current TCMsoftware applications.
Automation of existing and newly-developed testcases.
Development of more sophisticated pass/faildetermination of test cases.
CONCLUSION
In this paper, we presented the development of the 6-speed automatic transmission plant dynamics model forthe Delphis HIL Virtual Car Test Bench and how the HILbench is used in the verification and validation ofproduction controller and software. System architecture,
plant model, bench capabilities and example test casesare presented. Finally, future development is given.
REFERENCES
1. Q. Zheng, W. Chung, K. Defore and A. Herman, AHardware-in-the-loop Test Bench for ProductionTransmission Controls Software Quality Validation,SAE Technical Paper, No. 2007-01-0502, 2007.
-
8/13/2019 A 6-Speed Automatic Transmission Plant Dynamics Model for HIL Test Bench
11/11
CONTACT
Quan Zheng, Ph.D.Staff Research Engineer -Forward TransmissionControlsDelphi Powertrain SystemsTechnical Center Brighton12501 E. Grand River , Brighton, MI 48116 Phone: 810-494-4546Email: [email protected]
Asif HabeebullahSystems EngineerDelphi Powertrain SystemsTechnical Center Brighton12501 E. Grand River , Brighton, MI 48116 Email: [email protected]
Woowon ChungSenior Project Engineer - Forward TransmissionAlgorithmsDelphi Powertrain SystemsTechnical Center Brighton12501 E. Grand River , Brighton, MI 48116Phone: 810-494-4539Email: [email protected]
Andrew HermanStaff Engineer- Forward Transmission AlgorithmsDelphi Powertrain SystemsTechnical Center Brighton12501 E. Grand River , Brighton, MI 48116Phone: 810-494-4483Email: [email protected]
DEFINITIONS, ACRONYMS, ABBREVIATIONS
ECM : Engine Control Module
TCM: Transmission Control Module
PCM : Powertrain Control Module
AutoBOB : Automated Break-Out-Box
HAL: Hardware Abstraction Layer
HWIO: Hardware Input Output Layer
HIL: Hardware In the Loop
Matlab, Simulink, Stateflow, SimDriveline are RegisteredTrademarks of MathWorks, Inc.
TestDrive is a Registered Trademark of Opal-RTTechnologies.
INCA is a Registered Trademark of ETAS Inc.