9783319063997-c2
27
Chapter 2 Solid Mechanics Fundamentals Abstract In this chapter the mechanical fundamentals behind the numerical applications presented in this work are developed. Firstly it is present a brief exposition of the used continuum formulation, where the solid kinematics and constitutive equations are shown. Following it is presented the used weak form and the consequent generated discrete equation system. Next, the dynamic analysis equations are presented and transient analysis basic concepts are introduced. 2.1 Continuum Formulation The continuum mechanics is the foundation of the nonlinear numerical analysis. Solids and structures subjected to loads or forces become stressed. The stresses lead to strains, which can be interpreted as deformations or relative displacements. Solid Mechanics and Structural Mechanics deals, for a given solid and boundary condition (external forces and displacements constrains), with the relationship between stress and strain and the relationship between strain and displacements [1–3]. Solids can show different behaviours, depending on the solid material stress-strain curve. In this work only linear elastic materials are considered. In elastic materials the deformation in the solid caused by loading disappears fully with the unloading, in contrast, plastic materials show a residual deformation (which cannot be naturally recovered) that remains after the total unload process. The material properties on the solid can also be anisotropic, i.e., the material property varies with the direction [4]. On an anisotropic material the deformation caused by a load applied in a given direction causes a different deformation if the same load is applied in a distinct direction. Composite laminates are generally constituted by layers of anisotropic material. There are many material constants to be considered and defined in order to fully describe an anisotropic material, which is the reason why so often the engineering problems reduce the analysis to an isotropic material analysis. Isotropic materials are a special case of anisotropic materials, where only two independent material properties need to be known, the J. Belinha, Meshless Methods in Biomechanics, Lecture Notes in Computational Vision and Biomechanics 16, DOI: 10.1007/978-3-319-06400-0_2, ȑ Springer International Publishing Switzerland 2014 15
description
g
Transcript of 9783319063997-c2
-
Chapter 2Solid Mechanics Fundamentals
Abstract In this chapter the mechanical fundamentals behind the numericalapplications presented in this work are developed. Firstly it is present a briefexposition of the used continuum formulation, where the solid kinematics andconstitutive equations are shown. Following it is presented the used weak form andthe consequent generated discrete equation system. Next, the dynamic analysisequations are presented and transient analysis basic concepts are introduced.
2.1 Continuum Formulation
The continuum mechanics is the foundation of the nonlinear numerical analysis.Solids and structures subjected to loads or forces become stressed. The stresseslead to strains, which can be interpreted as deformations or relative displacements.Solid Mechanics and Structural Mechanics deals, for a given solid and boundarycondition (external forces and displacements constrains), with the relationshipbetween stress and strain and the relationship between strain and displacements[13]. Solids can show different behaviours, depending on the solid materialstress-strain curve. In this work only linear elastic materials are considered. Inelastic materials the deformation in the solid caused by loading disappears fullywith the unloading, in contrast, plastic materials show a residual deformation(which cannot be naturally recovered) that remains after the total unload process.The material properties on the solid can also be anisotropic, i.e., the materialproperty varies with the direction [4]. On an anisotropic material the deformationcaused by a load applied in a given direction causes a different deformation if thesame load is applied in a distinct direction. Composite laminates are generallyconstituted by layers of anisotropic material. There are many material constants tobe considered and defined in order to fully describe an anisotropic material, whichis the reason why so often the engineering problems reduce the analysis to anisotropic material analysis. Isotropic materials are a special case of anisotropicmaterials, where only two independent material properties need to be known, the
J. Belinha, Meshless Methods in Biomechanics, Lecture Notes in ComputationalVision and Biomechanics 16, DOI: 10.1007/978-3-319-06400-0_2, Springer International Publishing Switzerland 2014
15
-
Young modulus and the Poisson ratio. In this chapter the rigid solid motion anddeformation are described, with emphasis on rotation, which plays an importantrole in nonlinear continuum mechanics. Also the concepts of strain and stress innonlinear mechanics are introduced. The equilibrium and the constitutive equa-tions are presented afterwards.
2.1.1 Kinematics
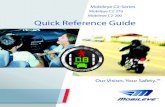
The general motion of a deformable body is represented in Fig. 2.1. The body, inthe initial position t 0, is considered to be an assemblage of material particles,labelled by the coordinates X, with respect to the Cartesian basis e. The currentposition of a particle is defined at time t by the coordinates x.
The motion can be mathematically described by a mapping function / betweeninitial and current particle positions,
x /X; t 2:1
It is considered the material description, the Lagragian description, since thevariation of the solid deformation is described with respect to the initial coordi-nates X, at time t.
2.1.1.1 Deformation Gradient
The deformation gradient F, is a key quantity in finite deformation analysis, sinceit is involved in all equations relating quantities before deformation (initial con-figuration) with the correspondent quantities after the finite deformation (currentconfiguration). The deformation gradient tensor F can be defined as,
F o/oX
r/ 2:2
Alternatively to Eq. (2.1) the motion can be expressed by,
x xX; t 2:3
which permits the deformation gradient to be written as,
F oxoX
2:4
16 2 Solid Mechanics Fundamentals
-
As so, for a three-dimensional deformation problem the deformation gradienttensor of an initial material position X X Y Zf g in respect to a currentmaterial position x x y zf g can be presented as,
F oxoX
oxoY
oxoZ
oyoX
oyoY
oyoZ
ozoX
ozoY
ozoZ
264
375 2:5
The determinant of the F is denoted by J and is called the Jacobiandeterminant.
J detF 2:6
The Jacobian determinant can be used to relate the integral of a given functionalf in the current and in the initial configuration by,
Z
X
f x; t dX Z
X0
f /X; t; t J dX0: 2:7
2.1.1.2 Strain
Consider the change of the scalar product of the two elemental vectors fromdX1 Q1 P and dX2 Q2 P, initial configuration, to dx1 q1 p anddx2 q2 p, current configuration, as a general measure of deformation. WhereQ1 and Q2 are two material particles in the neighbourhood of a material particle Pfor the initial configuration and q1 and q2 and p the same respective material
Fig. 2.1 General motion of adeformable body
2.1 Continuum Formulation 17
-
particles in the current configuration. Equation (2.4) permits the following rela-tions dx1 F dX1 and dx2 F dX2, and the spatial scalar product dx1 dx2 canbe found in terms of the material vectors dX1 and dX2 as,
dx1 dx2 dX1 FT FdX2 2:8
The right Cauchy-Green deformation tensor is defined by
C FT F 2:9
Which operates directly on the material vectors dX1 and dX2. Alternatively theinitial scalar product dX1 dX2 can be obtained in terms of spatial vectors dx1 anddx1 using the left Cauchy-Green deformation tensor b,
b F FT 2:10
The change in scalar product can now be found in terms of the material vectorsdX1 and dX2 and the Lagrange or Green strain tensor E can be defined as,
12
dx1 dx2 dX1 dX2 dX1 E dX2 2:11
where the strain tensor E is expressed as
E 12
C I : 2:12
2.1.1.3 Polar Decomposition
The tensor F can be expressed as the product of the orthogonal rotation tensor Rby the symmetric stretch tensor U,
F R U 2:13
where
RT R I and U UT 2:14
Such decomposition is called, polar decomposition, and Eq. (2.9) can beexpressed as,
C FT F UT RT RU UT IU UU 2:15
In order to actually obtain U from Eq. (2.15) it is first necessary to evaluate theprincipal directions of C, represented by the eigenvectors set W i and the
18 2 Solid Mechanics Fundamentals
-
correspondent eigenvalues ki, with i f1; 2; 3g for the three-dimensional case. Inthis manner C can be defined as,
C X3i1
k2i W i W i 2:16
since the eigenvectors W i are in fact orthogonal unit vectors, because C CT . Asso, with Eqs. (2.15) and (2.16) it is possible to write the material stretch tensor Uas,
U X3i1
kiW i W i 2:17
Once the stretch tensor U is known, the rotation tensor R can be obtainedwithout difficulty from Eq. (2.13).
R F U1: 2:18
2.1.1.4 Stress
In a large deformation analysis a body can experience a large rotation and/or alarge strain. The defined stress terms together with the obtained strain termsenables to express the virtual work as an integral over the known body volume,expressing in this manner the change in the body configuration. Both strain tensorand stress tensor are referred to the same deformed state. The Cauchy stress tensor,here defined as K, is a symmetric tensor and it represents the stresses of the currentconfiguration. For the three-dimensional case it can be defined as,
K rxx rxy rxzryx ryy ryzrzx rzy rzz
24
35 2:19
In this work it is used the Voigt notation, since the development of fourth ordertensors is less practical. In Voigt notation the tensors are expressed in columnvectors, so the stress tensor K is reduced to the stress vector r,
r rxx ryy rzz rxy ryz rzxf gT 2:20
and the strain tensor E to the strain vector e,
e exx eyy ezz exy eyz ezx T 2:21
The use of vectors is more practical in the programming process.
2.1 Continuum Formulation 19
-
2.1.1.5 Principal Stress
Another way of describing the Cauchy stress tensor, which completely defines thestress state in an interest point, is through,
K te^1
te^2
te^3
24
35
rxx rxy rxzryx ryy ryzrzx rzy rzz
24
35 2:22
where e^1, e^2 and e^3 are the versors of the coordinate system and te^i is the stressvector on a plane normal to e^1 passing through the interest point, Fig. 2.2(a).Following Cauchys stress theorem, if the stress vectors of three orthogonal planes,with a common point, are known, then the stress vector on any other plane passingthrough that point can be found through the coordinate transformation equations[5]. Thus, the stress vector tn in a point belonging to an inclined plane,Fig. 2.2(b), can be defined by,
tn n rij n1 n2 n3 rxx rxy rxzryx ryy ryzrzx rzy rzz
24
35 2:23
where n is the inclined plane normal vector. The relation in Eq. (2.23) leads to thetransformation rule of the stress tensor. The initial stress tensor rij, defined in thexi coordinate system, can be transformed in a new stress tensor r0ij, defined inanother x0i coordinate system by the relation,
K0 A K AT 2:24
being A the rotation matrix. Developing Eq. (2.24),
r0xx r
0xy r
0xz
r0yx r
0yy r
0yz
r0zx r
0zy r
0zz
264
375
a11 a12 a13a21 a22 a23a31 a32 a33
24
35
rxx rxy rxzryx ryy ryzrzx rzy rzz
24
35
a11 a21 a31a12 a22 a32a13 a23 a33
24
35
2:25
The aij coefficients can be understood as the projection of the x0i coordinatesystem versors in the xi coordinate system versors. Therefore, the angle betweenthe versors of each coordinate system can be defined as,
cij cos1 aij 2:26
Through Eq. (2.26) and Fig. 2.3 it is possible to comprehend better the physicalmeaning of the aij coefficients and the respective angles.
20 2 Solid Mechanics Fundamentals
-
Let P be an interest point of a considered stressed body. There are at least threeplanes, orthogonal with each other, crossing P where the corresponding stressvector is normal to the plane. These planes are called principal planes and the
Fig. 2.2 a Three-dimensional stress components. b Stress vector acting on a plane with normalvector n
Fig. 2.3 Stress tensor transformation and respective angles
2.1 Continuum Formulation 21
-
normal vectors of each plane are called principal directions. The stress vectors areparallel to the plane normal vectors and are called principal stresses.
The stress tensor is a physical quantity, independent of the coordinate systemchosen to represent it. Therefore, there are certain invariants associated with itwhich are also independent of the coordinate system. Being a second order tensor,the stress tensor has associated three independent invariant quantities. One set ofsuch invariants are the principal stresses of the stress tensor, which are just theeigenvalues of the stress tensor. Their direction vectors are the principal directionsor eigenvectors. A stress vector parallel to the normal vector n is given by,
tn kn rnn 2:27
being k a constant of proportionality, and in this particular case the magnitude of
rn, the principal stress in n direction. Knowing tni rijnj and ni dijnj, where
dij is the Kronecker delta, the following development can be performed,
tni kni ) rijnj kdijnj ) rij kdij
nj 0 2:28
which is a homogeneous system, three linear equations for three nj unknowns. Toobtain the nj non-zero solution, the matrix determinant must be equal to zero,
rij kdij
rxx k rxy rxzryx ryy k ryzrzx rzy rzz k
0 2:29
which leads to the following cubic equation,
rij kdij k3 I1k2 I2k I3 0 2:30
being I1, I2 and I3 the stress invariants,
I1 rkk 2:31
I2 12 riirjj rijrji 2:32
I3 det rij 2:33
The three roots k1 r1; k2 r2 and k3 r3 of Eq. (2.30) are the eigen-values or principal stresses, which are unique. Therefore the stress invariants havealways the same value regardless of the orientation of the chosen coordinatesystem. For each eigenvalue k, exists a non-trivial solution n on Eq. (2.28). Thesenj solutions, called eigenvectors, are the principal directions, which defines theplane where the respective stress acts. Applying Eq. (2.25),
22 2 Solid Mechanics Fundamentals
-
r1 0 00 r2 00 0 r3
24
35
n11 n12 n13n21 n22 n23n31 n32 n33
24
35
rxx rxy rxzryx ryy ryzrzx rzy rzz
24
35
n11 n21 n31n12 n22 n32n13 n23 n33
24
35
2:34
The principal stresses and principal directions characterize the stress in P andare independent of the orientation of the coordinate system.
2.1.2 Constitutive Equations
The following relation between the stress rate and the strain rate is assumed,
dr c de 2:35
The material constitutive matrix is defined by c and if material nonlinearrelations exists between r and e, then c cep. With Eq. (2.35) the followingrelation can be established,
de c1 dr 2:36
being s c1 and defined for the three-dimensional case as,
s
1Exx
tyxEyy tzxEzz
0 0 0
txyExx 1Eyy tzyEzz
0 0 0
txzExx tyzEyy
1Ezz
0 0 0
0 0 0 1Gxy 0 0
0 0 0 0 1Gyz 0
0 0 0 0 0 1Gzx
26666666664
37777777775
2:37
The material constitutive matrix c is obtained by inverting the material com-pliance matrix s, which is here defined for an three-dimensional anisotropicmaterial. The elements on matrix s are obtained experimentally. Eii is the Youngmodulus in direction i, tij is the Poisson ratio which characterizes the deformationrate in direction j when a force is applied in direction i, Gij is the shear moduluswhich characterizes the variation angle between directions i and j. Due to sym-metry the following relation can be established,
Ei tji Ej tij 2:38
For the two-dimensional case the plane stress and plane strain [5] deformationtheory assumptions can be presumed. Considering the plane stress assumptions,
2.1 Continuum Formulation 23
-
rzx rzy rzz 0, the material compliance matrix s is obtained directly fromthe three-dimensional compliance matrix s,
s 1
Exx tyxEyy 0
txyExx 1Eyy 00 0 1Gxy
264
375 2:39
For the plane strain deformation theory it is considered ezx ezy ezz 0 andthe material compliance matrix s is defined as,
s 1
Exx tzxtxzExx
tyxEyy
tzxtyzEyy 0 txyExx
tzytxzExx
1Eyy tzytyzEyy 0
0 0 1Gxy
264
375 2:40
In the case of an anisotropic material, it is possible to rotate the materialconstitutive matrix c and orientate the material directions with a vector. Consider aknown vector n in the Euclidean space R3, Fig. 2.4, and the respective projectionson the coordinate axis and in the oxy plane. As it is known,
h cos1 noxy noxnoxy noxk k
!and x cos1 noxy n
noxy nk k
!2:41
With the obtained angle information it is now possible to rotate the materialmatrix using the rotational transformation matrix and therefore align the materialox axis with the known vector n. The rotational transformation matrix that permitsan anticlockwise rotation along the ox axis of a known angle b can be defined as,
Fig. 2.4 Projection of vectorn in the coordinate axis and inthe oxy plane
24 2 Solid Mechanics Fundamentals
-
Tox
1 0 0 0 0 00 cos2 b sin2 b 0 sin 2b 00 sin2 b cos2 b 0 sin 2b 00 0 0 cos b 0 sin b0 sin b cos b sin b cos b 0 cos2 b sin2 b 00 0 0 sin b 0 cos b
26666664
37777775
2:42
Along the oy axis,
Toy
cos2 b 0 sin2 b 0 0 sin 2b0 1 0 0 0 0
sin2 b 0 cos2 b 0 0 sin 2b0 0 0 cos b sin b 00 0 0 sin b cos b 0
sin b cos b 0 sin b cos b 0 0 cos2 b sin2 b
26666664
37777775
2:43
Along the oz axis,
Toz
cos2 b sin2 b 0 sin 2b 0 0sin2 b cos2 b 0 sin 2b 0 0
0 0 1 0 0 0sin b cos b sin b cos b 0 cos2 b sin2 b 0 0
0 0 0 0 cos b sin b0 0 0 0 sin b cos b
26666664
37777775
2:44
The material matrix after rotation can be defined as,
ccurrent Toz Th Toy T
xcinitial Toy
x
h iToz h: 2:45
2.2 Weak Form
The strong form system equations are the partial differential system equationsgoverning the studied physic phenomenon. In contrast, the weak form requires aweaker consistency on the adopted approximation (or interpolation) functions. Theideal would be obtaining the exact solution from strong form system equations,however this is usually an extremely difficult task in complex practical engineeringproblems. Formulations based on weak forms are able to produce stable algebraicsystem equations and to give a discretized system of equations which leads to more
2.1 Continuum Formulation 25
-
accurate results. These are the reasons why so many prefer the weak form to obtainthe approximated solution.
In this work the discrete equation system is obtained using the Galerkin weakform, which is a variational method [6]. For meshless methods used in this bookthe discrete system of equations is obtained similarly with the FEM, with somedifferences inherent to the meshless approach. The discrete equations for the staticand the dynamic approach are developed and shown for the basic three-dimen-sional deformation theory.
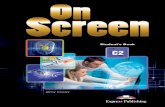
2.2.1 Weak Form of Galerkin
Consider the solid with a domain X bounded by C, Fig. 2.5. The continuous solidsurface on which the external forces t are applied is denoted as Ct (naturalboundary) and the surface where the displacements are constrained is denoted asCu (essential boundary).
The Galerkin weak form is a variational principle based on the energy principle.Of all possible displacement configurations satisfying the compatibility conditions,the essential boundary conditions (kinematical and displacement) and the initialand final time conditions, the real solution correspondent configuration is the onewhich minimizes the Lagrangian functional L,
L T U Wf 2:46
being T the kinetic energy, U is the strain energy and Wf is the work produced bythe external forces. The kinetic energy is defined by,
T 12
Z
X
q _uT _u dX 2:47
where the solid volume is defined by X and _u is the displacement first derivativewith respect to time, i.e., the velocity. The solid mass density is defined by q. Thestrain energy, for elastic materials, is defined as,
U 12
Z
X
eTr dX 2:48
being e the strain vector and r the stress vector. The work produced by the externalforces can be expressed as,
Wf Z
X
uTb dXZ
Ct
uTt dC 2:49
26 2 Solid Mechanics Fundamentals
-
where u represents the displacement, b the body forces and Ct the tractionboundary where the external forces t are applied. By substitution the Lagrangianfunctional L can be rewritten as,
L 12
Z
X
q _uT _u dX 12
Z
X
eTr dXZ
X
uT b dXZ
Ct
uT t dC 2:50
and then minimized,
dZt2
t1
12
Z
X
q _uT _u dX 12
Z
X
eTr dXZ
X
uT b dXZ
Ct
uT t dC
264
375 dt 0 2:51
Moving the variation operator d inside the integrals,
Zt2
t1
12
Z
X
d q _uT _u
dX 12
Z
X
d eTr
dXZ
X
duT b dXZ
Ct
duT t dC
264
375 dt 0
2:52
Since all operations are linear, changing the order of operation does not affectthe result. In the first term of Eq. (2.52) the time integral can be moved inside thespatial integral,
Zt2
t1
12
Z
Xd q _uT _u
dX
dt 1
2
Z
X
Zt2
t1
d q _uT _u
dt
24
35 dX 2:53
Using the chain rule of variation and then the scalar property, the integral canbe rewritten as,
Fig. 2.5 Continuous solidsubject to volume forces andexternal forces
2.2 Weak Form 27
-
Zt2
t1
d q _uT _u
dt qZt2
t1
d _uT _u _uTd _u dt 2qZt2
t1
d _uT _u
dt 2:54
And knowing that _uT _u is a scalar and _u = ou=ot,
Zt2
t1
d _uT _u
dt Zt2
t1
oduT
otouot
dt 2:55
Then integrating by parts, with respect to time,
Zt2
t1
oduT
otouot
dt
Zt2
t1
duT o2u
ot2
dt duT ou
ot
t2
t1
2:56
Notice that u satisfies, by imposition, the conditions at the initial time, t1, andfinal time, t2, leading to a null du at t1 and t2. Therefore the last term in Eq. (2.56)vanishes. Considering the last development and switching the integration orderagain, Eq. (2.53) becomes,
Zt2
t1
12
Z
Xd q _uT _u
dX
dt
Zt2
t1
qZ
XduTu
dt
2:57
being u = o2uot2 the acceleration. The second term on Eq. (2.52) can also be
developed. The integrand function in the second integral term can be written asfollows,
d eTr deTr + eTdr 2:58
as the two terms in Eq. (2.58) are in fact scalars, the transpose does not affect theresult, as so,
eTdr eTdr T drTe 2:59
Using the constitutive equation r ce and the symmetric property of thematerial matrix, cT c, it is possible to write,
drTe d ce Te deTcTe deTce deTr 2:60
28 2 Solid Mechanics Fundamentals
-
Therefore Eq. (2.58) becomes,
d eTr 2deTr 2:61
simplifying the second term in Eq. (2.52),
Zt2
t1
12
Z
X
d eTr
dX
24
35dt
Zt2
t1
Z
X
deTrdX
24
35dt 2:62
Equation (2.52) now becomes,
Zt2
t1
qZ
XduT u
dXZ
X
deTr dXZ
X
duT b dXZ
Ct
duT t dC
264
375dt 0 2:63
To satisfy Eq. (2.63) for all possible choices of the integrand of the timeintegration has to be null, leading to the following expression,
qZ
X
duT u
dXZ
X
deTr dXZ
X
duT b dXZ
Ct
duT t dC 0 2:64
This last equation is known as the Galerkin weak form, which can also beviewed as the principle of virtual work. The principle of virtual work states that ifa solid body is in equilibrium, the virtual work produced by the body inner stressesand the body applied external forces should vanish when the body experiments avirtual displacement. Considering the stress-strain relation, r c e, and the strain-displacement relation, e L u, Eq. (2.64) can be rearranged in the followingexpression,
Z
X
d L u T c L u dXZ
X
duT b dXZ
Ct
duT t dCZ
X
q duT u
dX 0 2:65
which is the generic Galerkin weak form written in terms of displacement, veryuseful in solid mechanical problems. In static problems the fourth term ofEq. (2.65) disappears.
2.3 Discrete System of Equations
The discrete equations for meshless methods are obtained from the principle ofvirtual work by using the meshless shape functions as trial and test functions. Thedomain X is discretized in a nodal distribution, and each node possesses an
2.2 Weak Form 29
-
influence-domain, which imposes the nodal connectivity between the neigh-bouring nodes. The meshless trial function uxI is given by,
uxI Xni1
uixIui 2:66
being uixI the meshless approximation or interpolation function and ui are thenodal displacements of the n nodes belonging to the influence-domain of interestnode xI . Considering the NNRPIM, it is known that the NNRPIM interpolationfunction satisfies the condition,
uixj dij 2:67
where dij is the Kronecker delta, dij 1 if i j and dij 0 if i 6 j. FollowingEq. (2.66), the test functions (or virtual displacements) are defined as,
duxI Xni1
uixIdui 2:68
where dui are the nodal values for the test function.
2.3.1 Weak Form of Galerkin
The meshless formulation can be established in terms of a weak form of thedifferential equation under consideration, Eq. (2.64). In the solid mechanics con-text this implies the use of the virtual work equation.
L Z
X
r de dXZ
X
b du dXZ
C
t du dC qZ
X
duT u
dX 0 2:69
The virtual deformation de is defined by,
de Bdu 2:70
where B is the deformation matrix. Thus, the virtual work of the first term inEq. (2.69), using Eq. (2.70), can be expressed as,
L1 Z
X
duTBTr dX 2:71
The strain vector can be divided in two parts, the linear part and the nonlinearpart,
30 2 Solid Mechanics Fundamentals
-
e e0 + eNL 2:72
which can also be presented as,
e L h|{z}e0
12A h|{z}eNL
L 12A
h 2:73
Matrix L is defined as,
L
eT1 013
013
013
eT2 013
013
013
eT3
eT2 eT1 0
13 0
13 eT3 e
T2
eT3 013
eT1
266666666666664
377777777777775
1 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 10 1 0 1 0 0 0 0 00 0 0 0 0 1 0 1 00 0 1 0 0 0 1 0 0
26666664
37777775
2:74
Being ei the coordinate i director column vector,
I e1 e2 e3 2:75
The column vector h is defined by,
h G u 2:76
The geometric matrix G is defined by,
GT ouox 0 0
ouoy 0 0
ouoz 0 0
0 ouox 0 0ouoy 0 0
ouoz 0
0 0 ouox 0 0ouoy 0 0
ouoz
264
375 2:77
which produces the following column vector h,
h hxhyhz
24
35 being hn
ouonovonowon
264
375 2:78
The current configuration displacement is considered in matrix A, which cor-responds in Eq. (2.73) to the actualized component.
2.3 Discrete System of Equations 31
-
A
hTx 01x3
01x3
01x3
hTy 01x3
01x3
01x3
hTz
hTy hTx 0
1x3 0
1x3 hTz h
Ty
hTz 01x3
hTx
266666666666664
377777777777775
ouox
ovox
owox 0 0 0 0 0 0
0 0 0 ouoyovoy
owoy 0 0 0
0 0 0 0 0 0 ouozovoz
owoz
ouoy
ovoy
owoy
ouox
ovox
owox 0 0 0
0 0 0 ouozovoz
owoz
ouoy
ovoy
owoy
ouoz
ovoz
owoz 0 0 0
ouox
ovox
owox
2666666664
3777777775
2:79
The deformation matrix B, dependent of u, can be defined as,
B B0 BNLu 2:80
since it varies with the deformation of the solid. The linear part of the deformationmatrix is represented by B0 and the nonlinear contribution by BNL. For the three-dimensional case,
BT0 ouox 0 0
ouoy 0
ouoz
0 ouoy 0ouox
ouoz 0
0 0 ouoz 0ouoy
ouox
264
375 2:81
and
BNL A G 2:82
The nonlinear deformation is actualized through matrix A, which contains thedisplacement current configuration.
2.3.2 Stiffness Matrix
The tangential stiffness matrix KT can be determined considering the variation ofthe virtual work of Eq. (2.71), in order to the generalized displacements du,
dL1 dZ
X
BTrdX
24
35 2:83
32 2 Solid Mechanics Fundamentals
-
which can be developed as,
dL1 Z
X
dBTrdX
Z
X
BTdrdX KTdu 2:84
Using Eqs. (2.35) and (2.70) the following relation is obtained,
dr cBdu 2:85
In the deformation matrix B only the nonlinear part dBNL is dependent of u,Eq. (2.80), thus dB dBNL and therefore,
dL1 Z
X
dBTNLr dXZ
X
BTc B dX 2:86
Where the stiffness matrix can be presented as,
KT Kr K0 KNL 2:87
Being,
Kr Z
X
dBTNL r dX 2:88
K0 Z
X
BT0 c B0 dX 2:89
KNL Z
X
BT0 c BNL BTNL c BNL BTNL c B0
dX 2:90
The initial stress matrix or geometric matrix Kr is defined as,
Krdu Z
X
GT dATr dX 2:91
The variation of matrix A in order to u can be defined as,
dAT dhx 0
31 0
31 dhy 0
31 dhz
031
dhy 031
dhx dhz 031
031
031
dhz 031
dhy dhx
26664
37775 2:92
2.3 Discrete System of Equations 33
-
As so, the term dAT r can be represented as,
dATr rxx I33
sxy I33sxz I33
syx I33ryy I33
syz I33szx I33
szy I33rzz I33
26664
37775dh Z dh ZG du 2:93
and therefore Eq. (2.88) can be presented as,
Kr Z
X
GT Z G dX 2:94
Therefore, the initial stress matrix Kr takes into consideration the actualizedstress field.
2.3.3 Mass Matrix
The virtual work of the last term in Eq. (2.69) can be expressed and developed as,
dL4 d qZ
X
duT u
dX
24
35 M du 2:95
where the mass matrix M can be defined as,
M Z
X
HT q H dX 2:96
being H the interpolation function matrix for the interest point i defined as,
Hi ui I 2:97
Where ui is the interpolation function for interest node i and I is the identitymatrix defined in Eq. (2.75). The density diagonal matrix can be defined as,
q qI 2:98
being q the solid material density.
34 2 Solid Mechanics Fundamentals
-
2.3.4 Force Vector
The virtual work of the middle terms in Eq. (2.69) can be expressed and developedas,
dL2 dZ
X
b du dX24
35 f b 2:99
and
dL3 dZ
C
t du dC24
35 f t 2:100
being the total force vector f defined as,
f b f t f 2:101
Thus, the total force vector f can be developed in a matrix form,
f Z
X
HTb dXZ
C
HTt dC: 2:102
2.3.5 Essential Boundary Conditions Imposition
If the shape functions of the meshless method possess the Kronecker delta prop-erty, then the boundary conditions can be imposed directly as in the FEM. Thecontinuum analysis involves two types of boundary conditions, the essentialboundary conditions (displacement related) and the natural boundary conditions(force related). Neglecting dumping effects and assuming that the matricial form ofthe equilibrium equations resulting from virtual work expression, Eq. (2.69), canbe presented as,
Ku Mu f 2:103
Such equation can be rewritten as,
Kcc KcdKdc Kdd
ucud
Mcc Mcd
Mdc Mdd
ucud
f c
f d
2:104
where uc are the unknown displacements and ud the known, or prescribed, dis-placements. The vectors f c and f d correspond respectively to the known applied
2.3 Discrete System of Equations 35
-
loads (external and body forces) and to the unknown reactions due the imposeddisplacement constrains. With the Eq. (2.104) it is assumed that the displacementcomponents considered are axial aligned with the prescribed displacements. If thisis not the case it is required the identification of all prescribed displacementorientations and transform locally the discrete equilibrium equations to correspondto the global axis. Thus,
u T u 2:105
where u is the vector of nodal point degrees of freedom in the required directions.The transformation matrix T is defined by Eq. (2.106) and Fig. 2.6, which is atypical representation of the constrained displacements in 2D and 3D analysis.
T2D ux vxuy vy
and T3D ux vx wxuy vy wyuz vz wz
24
35 2:106
Using Eqs. (2.105) and (2.106) it is possible to write,
K u M u f 2:107
where,
M TTM T 2:108
K TTK T 2:109
f TTf 2:110
Notice that the matrix multiplications in Eqs. (2.108), (2.109) and (2.110)involve changes only in those columns and rows of M, K and f that are actually
Fig. 2.6 Essential boundary condition nonaligned with the global axis
36 2 Solid Mechanics Fundamentals
-
affected by the prescribed displacement. In practice, the transformation can beeffectively carried out on the local level just prior to adding the local matrices tothe global assembled matrices.
2.3.6 Dynamic Equations
The equilibrium equations governing the linear dynamic response can be repre-sented as in Eq. (2.103). The fundamental mathematical method used to solveEq. (2.103) is the separation of variables. In order to change the equilibriumequations to the modal generalized displacements [7] it is proposed the followingtransformation:
ut U xt 2:111
where U is a m m square matrix containing m spatial vectors independent of thetime variable t, xt is a time dependent vector and m 2N for the 2D case andm 3N for the 3D case, being N the total number of nodes in the problem domain.From Eq. (2.111) also follows that _ut U _xt and ut U xt. The com-ponents of u(t) are called generalized displacements. For which the solution can bepresented in the form,
ut / sin x t t0 2:112
being / the vector of order m, t the time variable, the constant initial time isdefined by t0 and x is the vibration frequency vector. Substituting Eqs. (2.112) into(2.103) the generalized eigenproblem is obtained, from which / and x must bedetermined,
K / x2 M / 2:113
Equation (2.113) yields the m eigensolutions,
K /1 x21 M /1K /2 x22 M /2:K /m x2m M /m
2664 2:114
The vector / i is called the ith mode shape vector and xi is the correspondingfrequency of vibration. Defining a matrix U whose columns are the eigenvectors / i,
U /1 /2 . . . /m 2:115
2.3 Discrete System of Equations 37
-
and a diagonal matrix X which stores the eigenvalues xi,
X x21 0 00 x22 0... ..
. . .. ..
.
0 0 x2m
26664
37775 2:116
the m solutions can be written as,
K U M U X 2:117
It is required that the space functions satisfy the following stiffness and massorthogonality conditions,
UT K U X 2:118
and
UT M U I 2:119
After substituting Eq. (2.111) and its time derivatives into Eq. (2.103) and pre-multiplying it by UT, the equilibrium equation that corresponds to the modalgeneralized displacement is obtained,
xt X xt UT Ft 2:120
The initial conditions on xt are obtained using Eq. (2.111) and consideringthe the M-orthonormality of UT at time t 0,
x0 UT Mu0_x0 UT M _u0
2:121
Equation (2.120) can be represented as m individual equations of the form,
xit x2i xit fitfit / Ti Ft
2:122
with the initial conditions,
xt0i / Ti Mu0_xt0i / Ti M _u0
2:123
For the complete response, the solution to all m equations in Eq. (2.122) mustbe calculated and then the modal point displacements are obtained by superposi-tion of the response in each mode.
38 2 Solid Mechanics Fundamentals
-
ut Xmi1
/ ixit 2:124
Therefore the response analysis requires, first, the solution of the eigenvaluesand eigenvectors of the problem, Eq. (2.113), then the solution of the decoupledequilibrium equations in Eq. (2.122) and, finally, the superposition of the responsein each eigenvector as expressed in Eq. (2.124).
2.3.7 Forced Vibrations
In this book when forced vibrations are imposed only three different time-dependent loading conditions are considered, f t f gt. A time constantloadload case A,
gAt 1 2:125
A transient loadload case B,
gBt 1 if t tigBt 0 if t [ ti
2:126
And a harmonic loadload case C,
gCt sinc t 2:127
The solution of each equation in Eq. (2.123) can be calculated using theDuhamel integral,
xit 1xi
Z t
0
fis sin xit s ds ai sin xit bi cos xit 2:128
where ai and bi are determined from the initial conditions: Eq. (2.123) andfit / Ti f t. For load case A and load case B the obtained solution is defined as,
xit fitx2i1 cos xit _x
t0i
xisin xit xt0i cos xit 2:129
For load case C the obtained solution is,
xit fitx2i c2sin c t c
xisin xi t
2:130
2.3 Discrete System of Equations 39
-
References
1. Fung YC (1965) Foundations of solid mechanics. Englwood Cliffs, Prentice-Hall, New Jersey,USA
2. Malvern LE (1969) Introduction of the Mechanics of a Continuous Medium. Englwood Cliffs,Prentice-Hall, New Jersey, USA
3. Hodge PG (1970) Continuum mechanics. Mc Graw-Hill, New York4. Lekhnitskii SG (1968) Anisotropic Plates. Gordon and Breach Science Publishers, New York-
London-Paris5. Timoshenko S, Goodier JN (1970) Theory of Elasticity. 3rd ed. Singapore, McGraw Hill6. Reddy JN (1986) Applied functional analysis and variational methods in engineering.
McGraw-Hill, Singapore7. Bathe KJ (1996) Finite element procedures. Prentice-Hall, Englewood Cliffs
40 2 Solid Mechanics Fundamentals
-
http://www.springer.com/978-3-319-06399-7
2 Solid Mechanics FundamentalsAbstract2.1Continuum Formulation2.1.1 Kinematics2.1.1.1 Deformation Gradient2.1.1.2 Strain2.1.1.3 Polar Decomposition2.1.1.4 Stress2.1.1.5 Principal Stress
2.1.2 Constitutive Equations
2.2Weak Form2.2.1 Weak Form of Galerkin
2.3Discrete System of Equations2.3.1 Weak Form of Galerkin2.3.2 Stiffness Matrix2.3.3 Mass Matrix2.3.4 Force Vector2.3.5 Essential Boundary Conditions Imposition2.3.6 Dynamic Equations2.3.7 Forced Vibrations
References