
A synopsis on aging—Theories, mechanisms and future prospects

7 D-R134 S19 THEORIES OF K INEMTIC ANALYSIS AND SYNTHESIS
OF SPATIAL 1/1MECHANISMS CONTRI..(U) FLORIDA UNIV GAINESVILLE DEPT OF
U AS MECHANICAL ENGINEERING G N SANDOR El AL. 17 SEP 83NCASIIE ROi61.-E AFG9-1K-8125 F/G 20/11 N

1.0 1 u0
Wo.
MM
MICROCOPY RESOLUTION TEST CHIART
NiATIONAL BUREAU OF STANOARDS 1963-A
, - ,
.,.-
"" Ab ,'1O4, 4,-6w
BEST AVAILABLE COPY
THEORIES OF KINEMATIC ANALYSIS AND SYNTHESISOF SPATIAL NECHANISMS CONTAINING LOWER AND HIGHER PAIRS
FINAL REPORTPeriod Covered 7/20/81 - 7/19/83
Dr. George N. Sandor, P.I.,Dr. Dilip Koh1i, Dr. Charles F. Reinholtz,Hr. Ashitova Ghosal, Dr. Manuel Hernandez
and Mr. Partha De, with the help of Mr. Martin DiGirolamo
December 31, 1981
U.S. ARMY RESEARCH OFFICE
GRANT NO.DAAG29-81-K-0125
UNIVERSITY OF FLORIDA
Approved for Public Release;Distibution Unlimited
A D. 83 11 07 030

'1CUU TV CLASSUICATION OF TNIS PAGE (mo.. D ae* E D.n d)
REPORT DOCUENTT!O PAGE READ FNSTRUCTIONSBEFORE COMPLETTNG FORM
9. fta&[*Qr Teum|bw GOVT ACCESS1ON NO 3. RECIPIENTS CATALOQ. NUMBER
Final Report _______________/__
4. TITL e941.aS,.I3 I Pber 5. TYPE OF REPORT 6 PERIOD COVERED
Theories of Kinematic Analysis and Synthesis of Final Report
Spatial Mechanisms Containing Lower and Higher 7/20/81 - 7/19/83
Pairs. 6 P pF-o--G OR. REPORT -Ub E R
7. A;JThvO J.... S. CONTRACT OR GRANT NUMBER(-)
Dr. George N. Sandor, DAAG 29.-8-K-0125Dr. Charles F. Reinholtz
p. &;ko0RMoR GO.GAMZATION NAME AND ADDRESS S0. PROGRAM ELEMENT. PROJECT. TASK
University of Florida AREA a WORK UNIT NUMBERS
Department of Mechalitcal Engineeri.ngGainesville, Florida 32611
It. CONTROLLING OFFICE NAME AND ADDRESS 12. REPORT DATE
U. S. A_ .r Research Office September 17, 1983?ost Office Box 12211 13. NUMBER OF PAGE'S
Pesearch Triangle Park, WC 27709-14. IwOTORING AGENCY NAME S AOORIESS(11 dit. en amm Contfollin* Ollice) 15. SECURITY CLASS. (at hie report)
Unclassified15-. DECLASSiPiCATION/DOp4GRAON G
SCHEDULE
OfS. :TRIDUTION STATEMENT (of chi& Reporf)
Approved for public releaser distribution unlimited.
17. VOSTIgOp STATEMIENT (of ta bot,.en gtered in block 20. itf IIrent ho., Report)
IA
II. SUPPLEMETARY NOTES
The view, opinions, and/or findings contained in this report are those of theauthor(s) and should not be construed as an official Department of the Armyposition, policy, or decision, unless so designated by other documentation.
99. KECY wOROS (Continue M reul.e stle Of nec seary an ld tity 57 ortocg nwlmn.)
Kinematics, Synthesis, Analysis, Higher Pairs, Mechanism, Spatial Mechanisms, Vechanism type, Sphere-plane pairs, Sphere-grove pairs, Sphere-slotted-cylinder pairs,Branch avoidance order defect, Grashuf analysis, Mobility analysis, Position stack-ing, Wholistic design, Non-linear equations, Optimization, Path generation, Function•generation, Motion generation.iiV SSTUAcr rcac~ em o.wmo at-% it n,.c-d.' mod idew'itr by blockr nmb.-)
Accomplishments to date include vector-theories for the analysis of spatialAunction, path, and motion generators containing higher-pair joints. Also completedre design theories which assure that a synthesized mechanism is free from branchingefects. Additional theories have been developed for synthesizing several types ofingle-input spatial motion generator mechanism with complete input crank rotation,I ptsma transmission charcteristics and correct order of output positions. Methodsve also been developed for efficently formulating and solving systems of non-linear
A N 1473 E . oF , ovssSoDoLE?( UNCLASSIFIEDSiEcury CLASSIVICATiOn OF TIS PAGE (W m Dae E.'9-d)
.4 **** * ** * '* * ~*~ *...e .. .S ~ .rCAT O

BLOCK 20. Cont..
. ! equations wtich commonly arise In the synthesis of spatial mechanisms. The theoriesdeveloped under the sponsorship of this grant have expanded the utility of spatialmechanisms. It has led to simplified analysis and design theories for spatialmechanisms containing higher pairs and it has produced a new "wholeistic" approach tospatial
.5
S'

".3-
4. List of Material Contained in the Appendix
The appendix contains copies of the following papers which have beenpublished. The titles and authors have been listed below, all otherpublication material is contained in section 5c. of this report.
1) *Kinematic Analysis of Three-Link Spatial Mechanisms ContainingSphere-Plane and Sphere-Groove Pairs," G.N. Sandor, D. Kohli, M.V.Hernandez, and A. Ghosal.
2) Kinematic Analysis of Four-Link Space Mechanisms ContainingSphere-Groove and Sphere-Slotted-Cylinder Higher Pair," A. Ghosal , D.Kohl I, and G. N. Sandor.
The abstracts of the following Masters Thesis and Doctoral Dissertationshave also been Included in the appendix.
1. "Analysis of Spatial Mechanisms Containing Higher Pairs," MastersThesis by Ashitava Ghosal.
2. *Optimization of Spatial Mechanism", Ph.D. Dissertation by Charles F.Reinholtz.
3. "Kinematic Synthesis and Analysis of Three-Link Spatial FunctionGenerators with Higher Pairs," Ph.D. Dissertation by Manual V.Hernandez.
.......................1

-2-
TABLE OF CONTENTS
1. Title Page ............... .. ...................................... i
2. Report Documentation Page (DO form 1473)......................... 1
3. Table of Contents ................................................ 2
4. List of Material Contained in the Appendix ....................... 3
5. Report Body5a. Statement of the Problem Studied ........................ 45b. Summary of the Most Important Results ................... 45c. List of Publications and Technical Reports .............. 55d. List of Participating Scientific Personnel .............. 5
6. Bibli.ography..................................................... 6
7. Appendices ........ ..... .......................... ................ 22
Acoession For
DTIC TABUnannounced 0Justification
Distribution/
Availability CodesAvail and/or
Dist Special
. 6X _ " . ., .. * .-.

-4-
5.a. State of the Problem Studied
Design and analysis theories for planar mechanisms are well developed and such
devices are in common use. However, many automation tasks require mechanisms Wfich
can generate spatial motion. One solution is to employ multi -deg ree- of- freedom,
multiple-input robotic manipulators. However, these devices are limited in speed
and accuracy, and require sophisticated electronic control systems. On the other
hand, sigle-input spatial mechanisms, the topic of this research, are purely
mechanical, and are better suited for performing highly repetitive automation tasks
of limited complexity more efficiently, reliably and economically than robotic
manipulators.
Single-input spatial mechanisms are much more difficult to design and analyze
than planar mechanisms. As a result, their use to date has been quite limited.
This is especially true of spatial mechanisms containing higher pairs (joints Vhich
-develop only point or line contact and allow several degrees of freedom of relative
motion).
The research being conducted under this grant attempted to develop simplified
theories for designing and analyzing single-input spatial mechanisms.
6.b. Summnary of Host Important Results
Accomplishments to date include vector-theories for the analysis of spatial
function, path and motion generators, containing higher-pair joints which allow
minimizing the number of mechanical parts. For example, a newly analyzed class of
spatial function generators has only two moving links: the input and the output.
Also completed are design theories which assure that a synthesized mechanism is
free from the "branching defect" (i.e. satisfies the physical motion requirements
as well as the mathematical criteria. Additional theories have been developed for
synthesizing several types of single-input spatial motion generator mechanisms to
have complete input crank rotation, to have optimal transmission characteristics
and to have the correct order of output positions.

;-47.- 71 -1 -.
-5-
Methods have been developed for efficently formulating and solving systems of
non-linear equations which commonly arise in the synthesis of spatial mechanisms.
It is believed that the theories developed under the sponsorship of this grant
have greatly expanded the utility of spatial mechanisms in two important ways.
First, it has led to simplified design and analysis theories for spatial mechanisms
containing higher pairs. Second, it has produced a new "wholeistic" approach to
spatial mechanism design, wherein many of the "real-world" constraint conditions
are considered in the design process.
5.c. List of Publications1. "Kinematic Analysis of Three-Link Spatial Mechanisms Containing Sphere-
Plane and Sphere-Groove Pairs" G.N. Sandor, D. Kohli, M.V. Hernandez andA. Ghosal, Proceedings of the Seventh Applied Mechanisms Conference, 1981pp. XXXII-1 to XXXII-11; Mechanism and Machine Theory, 1984.
2. "Kinematic Analysis of Four-link Space Mechanisms Containing Sphere-Grooveand Sphere-Slotted-Cylinder Higher Pairs," A. Ghosal, D. Kohli, and G.N.Sandor, ASME paper 82-DET-123, Presented at the 1982 ASME Mechanisms Con-ference.
3. "Analysis of Spatial Mechanisms Containing Higher Pair," Masters Thesis byAshitava Ghosal, Presented to the Graduate Council of the University of
Florida, August, 1982.
4. "Optimization of Spatial Mechanisms," Ph.D. Dissertation by Charles F.Reinholtz, presented to the Graduate Council of the University of Florida,August, 1983.
5. "Kinematic Synthesis and Analysis of Three-Link Spatial Function Genera-tors with Higher Pairs," Ph.D. Dissertation by Manuel V. Hernandez, Pre-sented to the Graduate Council of the University of Florida, April 1983.
5.d. Participating Scientific Personnel
Personnel Drawing Support from this Project:
1) Dr. George N. Sandor, P.I.21 Dr. Dilip Kohli, Consultant
Mr. Ashitava Ghosal, earned Ph.D., August, 1983.Dr. Charles Reinholtz, earned Ph.D., August, 1983.
5) Mr. Partha De, Master's Degree Candidate
Personnel Contributing to the Research but not drawing support from thisProject:
1) Mr. Xtrong Zhuang, Visiting Engineer from the People's Republic of China.2) Dr. Manuel V. Hernandez, earned Ph.D., May, 1983.
4-..,... ,:.,.,
* ,-6-
6. BIBLIOGRAPHY OF PEFERENCES
Sources of Information Used In.this Research
1* Freudenstein, F.•, "Approximate Synthesis of Four-Baer Linkages," ASME Paper 54-F-14, Sept. 1954.
2. Freudenstein, F., and G.N. Sanaor, "Synthesis of aPath Generating Mechanism by a Programmed DigitalComputer," Journal of Engineering for Industry,Trans. ASME, Series B, Vol. 81, No. 2, May 1959,pp..159-168.
3. Hrones, J., and G. Nelson, Analysis of the Four-BarLinkage, The Technology Press of the Massachusettsinstitute of Technology, and John Wiley and Sons,Inc., New York, N.Y., 1951.
4. Freudenstein, F., "An Analytical Approach to theo Design of Four-Link Mechanisms," Journal of
Engineering for Industry, Trans. ASME, Series B,Vol. 76, No. 3, April 1954, pp. 483-492.
5. Freudenstein, F., "Four-Bar Function Generators, uTransactions of the 5th Conference on Mechanisms,Penton Publishing Co., Cleveland, 1958, pp. 104-107.
6. Roth, B., and F. Freudenstein, "Synthesis of Path-Generating Mechanisms by Numerical Methods," Journalof Ensineering for Industry, Trans. ASME, SeresB,Vol. 85, No. 3, Aug., 1963, pp. 298-306.
7. Hall, A.S., Jr., Kinematics and Linkage Design,Prentice-Hall, Englewood Cliffs, N.J., 1961.
8. McLarnqn, C.W., "Synthesis of Six Link PlaneMechanf~ms by Numerical Analysis," Journal ofEngineering for Industry, Trans. ASME, Series B,Vol. 85, No. 1, Feb. 1963, pp. 5-11.
9. Denavit, J., and R.S. Hartenberg, "A KinematicNotation for Lower Pair Mechanisms Based on Matrices,"Journal of Applied Mechanics, Trans. ASME, Series E,Vol. 77, No. 1, 1955, pp. 215-221.
S, ,. .. .,- . : -. -- .- - ,-. .. . . ... . . . .-... . . . .
AEZ77-I-.7. -:i 7. ' -A 7
10. Denavit, J., and R.S. Hartenberg, OApproximateSynthesis of Spatial Linkages," Journal of AppliedMechanics, Trans. ASME, Series E, Vol. 27, No. 1,1960, p. 201-206.
11. Beyer, R., Raumkinematische Grundlagen, JohannAmbrosins Barth, Munhen, 1953.
12. Dimentberg, F.M., "A General Method for theInvestigation of Finite Displacements of SpaceMechanisms and Certain Cases of Passive Joints,'Trudli Ser. Theorii Mash. Mekh., Vol. 5, No. 17,1948, pp. 5-39.
13. Novodvorskii, E.P., 'One Method of MechanismSynthesis,' Trudii Sem. Theorii Mash. Mekh., Vol.45, 1951.
14. Stepanov, B.I., "The Design of Spatial Mechanismswith Lower Pairs,' Trudii Sem. Theorii Mash. Mekh.,Vol. 45, 1951.
15. Levitskii, N.I., and KK. Shakvazian, 'Synthesis ofFour-Element Spatial Mechanisms with Lower Pairs,"translated by F. Freudenstein, International Journalof Mechanism Science, Vol. 2, 1960, pp. 76-92.
16. Beyer, R., 'Space Mechanisms,' Transactions of the5th Conference on Mechanisms, Purdue University, Oct.13-14, 1958, pp. 141-163.
17. Rarrisberger, L., 'A Number Synthesis Survey of Three-Dimensional Mechanisms,' Journal of Engineering for
., Trans. ASME, Series B, Vol 87, No. 2, May36 5 pp. 213-220.
18. Yang, A.T., NA Brief Survey of Space Mechanisms,"Proceedings of the 1st ASME Design TechnologyTransfer Conference, Oct. 5-9, 1974, pp. 315-321.
19. Wilson, J.T., III, 'Analytical Kinematic Synthesisby Finite Displacements," Journal of Engineeringfor.Industry, Trans. ASME, Series B, Vol. 87, No. 2,May 1965# pp. 161-169.
20. Freudenstein, F., "Structural Error Analysis in PlaneKinematic Synthesis," Journal of Engineering forI s Trans. ASME, Series B, Vol. 81, No. 1,Feb. 1959, pp. 15-22.

21. ROth, B., F. Freudenstein and G.N. Sandor, "SynthesisOf Four Link Path Generating Mechanisms with OptimumTransmission Characteristics, Transactions of the7th Conference of Mechanisms, Purdue University, Oct.-1962, pp. 44-48.
22. Chi-Yeh, H., A Generl Method for the OptimumDesign of Mechanisms,' J. Mechanisms, Vol. 1, 1966,pp. 301-313.
23. FOX, R.L., and K.D. Willmert, "Optimum Design ofCurve-Generating Linkages with InequalityCnstraints," Journal of Engineering for Industry,Trans. ASME, Series B, Vol. 89, No. 1, Feb. 1967,pp. 144-152.
24. Tomas, J., "The Synthesis of Mechanisms as a NonlinearProgramming Problem," J. Mechanisms, Vol. 3, 1968,pp. 119-130.
25. Garrett, R.E., and A.S. Hall, Jr., 'optimal Synthesisof Randomly Generated Linkages," Journal of Engineer-ing for Industry, Trans. ASME, Series B, Vol. 90,No. 3, Aug. 1968, pp. 475-480.
26. Tesar, D., 'A Personal View of the Past, Present,.and Future of Mechanism Science,' Proceedings of'the National Science Workshop on New Directions forKinematics Research, Stanford University, Aug. 2-3,1976# p.252-298.
27.- Eschenbach, P.W., and D. Tesar, "Optimization ofFour-Bar Linkages Satisfying Four GeneralizedCoplanar Positions," Journal of Enineering forIndustry, Trans. ASME, Series B, Vol. 91, No. 1,Feb. 1969, pp. 75-82.
28. Lewis, D.W., and C;K. Gyory, "Kinematic Synthesis ofPlane Curves," Journal of Engineering for Industry,Trans. ASME, Series B, Vol. 89, No. 1, Feb. 1967,pp. 173-176.
29. Levitskii, N.I., and Y. Sarkisian, On the SpecialProperties of Lagrange's Multipliers in the Least-Square Synthesis of Mechanisms," J. Mechanisms,Vol. 3, 1968, pp. 3-10.
30. McLarnan, C.W., 'On Linkage Synthesis with MinimumError," J. Mechanisms, Vol. 3, No. 2, 1968, pp. 101-105.
', ' - -"" "." ":,,.'-' " -,-, - '- - . :/ :. :.--- .- -. .:- - - --- _.....,_-

-9-
31. Sandor, G.N., and D.R. Wilt, "Optimal Synthesis ofa Geared Four-Link Mechanism;" J. Mechanisms, Vol.4, 1969, pp. 291-302.
32. Tomas, J., "Optimum Seeking Methods Applied to aProblem of Dynamic Synthesis in a Loom," J.Mechanisms, Vol. 5, 1970, pp. 495-504.
33. Benedict, C.E., and D. Tesar, "Optimal TorqueBalance for a Complex Stamping and Indexing Machine,"ASME Paper 71-Vibr-109, 1971.
34. Lowen, G.G., and R.S. Berkof, "Determination ofForce-Balanced Foul-Bar Linkages with OptimumShaking Moment Characteristics," Journal of
ElneerinM for Industry, Trans. ASME, Series B,Vol. 93, No. 1, Feb. 1971, pp. 39-46.
35. Berkof, R.S., and G.G. Lowen, "Theory of ShakingMoment Optimization of Force-Balanced Four-BarLinkages,I Journal of Engineering for Industry,Trans. ASXE, Series B# Vol. 93, No. 1, Feb. 1971,pp. 53-60.'
36. uang, M., H.R. Sebesta and A.H. Soni, "Design ofLinkages Using Dynamic Simulation and OptimizationTechniques," ASME Paper 72-Mech-84, 1972.
37. Sadler, J.P., and R.W. Mayne, "Balancing ofMechanisms by Nonlinear Programming," Proceedin sof the 3rd Applied Mechanisms Conference, Stilwater,Oklahoma, Paper No. 29, 1973.
38. Elliot, J.L., and D. Tesar, "The Theory of Torque,Shaking Force and Shaking Moment Balance of Four-Link Mechanisms," ASME Paper 76-WA/DE-24, 1976.
39. Kaufman, R.E., and G.N. Sandor, "Complete ForceBalancing of Spatial Linkages," Journal ofEngineering for Industry,*Trans. ASME, Series B,Vol. 93, No. 2, 1971t pp. 620-626.
40. Golinski, J., "Optimal Synthesis Problems Solved byMeans of Nonlinear Programming and Random Methods,"J. Mechanisms, Vol. 5, No. 3, 1970, pp. 287-309.
41. Alizade, R.I., I.G. Novruzbekov and G.N. Sandor,"Optimization of Four-Bar Function GeneratingMechanisms Using Penalty Functions with Inequalityand Equality Constraints," Mechanism and MachineTheory, Vol. 10, 1975, pp. 327-337.
o . o o . . . o . - o . - . . - - . . , .

"*10-
42. Rose, R.S., and G.N. Sandor, "Direct AnalyticSynthesis of Four-Bar Function Generators withOptimal Structural Error," Journal of Engineeringfor Industry, Trans. ASME, Series B. Vol. 95, No.2, May T97 , pp. 563-571.
43. Savage, M., and D.H. Suchora, "Optimal Design ofFour-Bar Crank Mechanisms with Prescribed ExtremeVelocity Ratios" ASME Paper 73-WA/DE-13, 1973.
44. Nolle, H., and K. Hunt, "Optimum Synthesis ofPlanar Linkages to Generate Coupler Curves," J.Mechanisms, Vol. 6, No. 3, 1971, pp. 267-287.
45. Bagci, D., and T. Brosfield, "Computer Method forMinimum Error Synthesis of Multiloop Plane Mecha-nisms for Function Generation via the NelsonCoupler Curve Atlas," International Symposium onLinkages Computer Design Methods, Burcherest,Romania, June 7-14, 1974.
46. Bagci, D., and I.P.J. Lee, "Optimum Synthesis ofPlane Mechanisms for the Generation of Paths andRigid-Body Positions via the Linear SuperpositionTechnique," ASME Paper 74-DET-10, 1974.
47. Huang, M., "Optimal Design of Linkages UsingSensitivity Coefficients," ASME Paper 74-DET-59,1974.
48. Lee, T.W., and F. Freudenstein, "Hueristic Combina-torial Optimization in the Kinematic Design ofMechanisms," Part It. Theory and Part II: Appli-cations, ASME Papers 76-DET-24 and 76-DZT-25.
49. Datseris, P., and F. Freudenstein, "Optimum Synthesisof Mechanisms Using Hueristics for Decomposition andSearch," Journal of Mechanical Design, Trans. ASME,Vol. 101, No. 9, July 1979, pp. 380-385.
50. Sutherland, G.H., and J, N. Siddall, "DimensionalSynthesis of Linkages bj"Multifactor Optimization,"Mechanism and Machine Theory, Vol. 9, No. 1, 1974,pp. 81-95.
51. Spitznagel, K.L., 'Near-Global Optimum of SynthesizedFour-Bar Mechanisms by Interactive Use of WeightedKinematic Sequential Filters," H.S. Thesis,University of Florida, Gainesville, Florida,1975.
w ma - u ' " - - - " - . -.- "

52. Spitznagel, K.L., and D. Tesar, "MultiparametricOptimization of Four-Bar Linkages," Journal ofMechanical Design, Trans. ASME, Vol. I, No. 3,July 1979, pp. 386-394.
53. Chen, F.Y., and V. Dalsania, "Optimal Synthesis ofPlanar Six-Link Chains Using Least-Squares GradientSearch," Transactions of the Canadian Society ofMechanical Engineers, Vol. 1, No. 1, March 1972,pp. 31-36.
54. Prasad, K.N., and C. Bagci, "Minimum Error Synthesis* of Multiloop Plane Mechanisms for Rigid Body
Guidance," Journal of Engineering for Industry,Trans. ASME, Series B, Vol. 96, No. 1, Feb. 1974,pp. 107-116.
55. "Sallam, M.M., and J.C. Lindholm, "Procedures toSynthesize and Optimize the Six-Bar Watt-l Mechanismfor Function Generation," ASME Paper 74-DET-13, 1974.
56. Mariante, W., and K.D. Willmert, "Optimum Design ofa Complex Planar Mechanism," ASME Paper 76-DET-47,1976.
57. Spitznagel, K.L., "Multiparametric Optimization ofFour-Bar and Six-Bar Linkages," Ph.D. Dissertation,University of Florida, Gainesville, Florida, 1978.
58. Dhande, S.G., and J. Chakraborty, "Analysis andSynthesis of Mechanical Error- in Linkages - AStochastic Approach," Journal of Engineering forIndustry, Trans. ASME, Series B, Vol. 95, No. 3,.Aug. 1973, pp. 672-676.
59. Sevak, N.M., and C.W. McLarnan, "Optimal Synthesis
of Flexible Link Mechanisms with Large StaticDeflections," ASME Paper 74-DET-83, 1974.
60. Huey, C.O., Jr., and M.W. Dixon, "The Cam-LinkMechanism for Structural Error-Free Path and FunctionGeneration," Mechanism and Machine Theory, Vol.- 9,No. 3, Autumn 1974, .pp. 367-387.
61. Kramer, S.N., and G.N. Sandor, "Selective PrecisionSynthesis - A General Method of Optimization forPlanar Mechanisms," Journal of Engineering forIndustry, Trans. ASME, Series B, Vol. 97, No. 2,May 1975, pp. 689-701.
*¥~-~ . 7 -. 7*7~ 7

p~.. -12-
62. Kramer, S.N., "Selective Precision Synthesis of theFour-Bar Motion Generator w3 th Prescribed InputTiming," Journal of Mechanical Design, Trans. ASMEVol. 101, No. 4, Oct. 1979, pp. 614-618.
63. Sutherland, G.H., "Mixed Exact-Approximate PlanarMechanism Position Synthesis," Journal of Engineeringfor Industry, Trans. ASME, Series B, Vol. 99, No. 2,May 1977, pp. 434-438.
64. Choubey, M., and A.C. Rao, *Synthesizing Linkageswith Minimal Structural and Mechanical Error BasedUpon Tolerance Allocationa Mechanism and MachineTheory, Vol. 17, No. 2, 1982, pp. 91-97.
65. Stridher, B.N., and L.E. Torfason, "Optimization ofSpherical Four-Bar Path Generators,' ASME Paper70-Mech-46, 1970.
66. Bagci, C., and K.C. Parehk, "Minimum Error Synthesisof the Spherical Four-Bar and Watt's Type SphericalSix-Bar Mechanism,' Proceedings of the 3rd WorldCongress on the Theory of Machines and Mechanisms,Dubrovnik, Yugoslavia, Vol. C, Paper No. 1, 1971.
1 67. Bagci, C., 'Design of Spherical Crank-RockerMechanism-with Optimal Transmission,* Journal ofEngineering for Industry, Trans. ASME, Series B,Vol. 95, No. 2, May 1973, pp. 577-583.
68. Rao, S.S., and A.G. Ambekar, 'Optimum Design ofSpherical 4-R Function Generating Mechanisms,"Mechanism and Machine Theory, Vol. 9, No. 3/4,Autumn 1974, pp. 405-410.
69. Hamid, S., and A.B. Soni, "Design of Space-CrankRSSP Mechanism with Optimum Force Transmission,"ASME Paper 72-Mech-82, 1972.
70. Shoup, T.E., J.R. Steffen and R.E. Weatherford,"44 "Design of Spatial Mechanisms for Optimal Load
Transmission,' ASME Paper 72-Mech-88, 1972.
71. Gupta, V.K., "Computer-Aided Synthesis of MechanismsUsing Nonlinear Programming," Journal of Engineerin3for Industry, Trans. ASME, Series B, Vol. 95, No. 1,Feb. 1973, pp. 339-344.
72. Suh, C.H., and A.W. Mechlenburg, "OptIrial Design ofMechanisms with the Use of Matrices and LeastSquares," Mechanism and Machine Theory, Vol. 8, No.4, Winter 1973, pp. 479-495.
.4
.4'

I .. . , . - + , - . . . . . . .. . . . . . , . .
-13-"
73. Bagci, C., "Minimum Error Synthesis of SpaceMechanisms for the Generation of Constrained andUnconstrained Screws," Journal of Engineering forIndustry, Trans. ASME, Series B, Vol. 93, No. l,Feb. 1971, pp. 165-175.
74. Alizade, R.I., A.V. Mohan Rao and G.N. Sandor,"Optimum Synthesis of Four-Bar and Offset Slider-Crank Planar and Spatial Mechanisms Using thePenalty Function Approach with Inequality andEquality Constraints," ASME Paper 74-DET-30, 1974.
75. Alizade, R.I., A.V. Mohan Rao and G.N. Sandor,:" Optimum Synthesis of Two-Degree-of-Freedom Planar
and Spatial Function Generating Mechanisms Usingthe Penalty Function Approach," ASME Paper 74-DET-51,1974.
76. Suh, C.H., and C.W. Radcliffe, Kinematics andMechanism Design, John Wiley and Sons, New York,1978.
77. Bagci, C., and D.R. Falconer, "Optimum Synthesis ofthe RSSR and RSSP Function Generators with the MostFavorable Transmission Characteristics," Proceedingsof the 7th Applied Mechanisms Conference, Kansas,City, Missouri, 1981, pp. XXVII 1-11.
78. Soylemez, E., and F. Freudenstein, "TransmissionOptimization of Spatial Four-Link Mechazisms,"Mechanism and Machine Theory, Vol. 17, No. 4, 1982,pp. 263-283.
79. Karelin, V.S., "Synthesis of Optimum Slider-CrankMechanisms," Mechanism and Machine Theory, Vol. 17,
" .. No. 4, 1982, pp. 285-287.
80. Paul, B., "A Reassessment of Grashof's Criterion,"Journal of Mechanical Design, Trans. ASME, Vol. 101,No. 3, July 1979, pp. 515-518.
81. Filemon, E., "Useful Ranges of Centerpoint Curvesfor Design of Crank-and-Rocker Linkages," Mechanismand Machine Theory, Vol. 7, No. 1, 1972, pp. 47-53.
82. Jenkins, E.M., Jr., F.R.E. Crossley and K.H. Hunt,"Gross Motion Attributes of Certain SpatialMechanisms," Journal of Engineering for Industry,Trans. ASME, Series B, Vol. 91, No. 1, Feb., 1969,pp. 83-90.
*; .. - . .. - - - .. - - ,.- .? - .? - . .- ... -" . .+ , .. _-". -.. " . , ., .- , .. -- . ..-. - -
-71 -1!, -7.-r--w- --.1 -
-14-
83. Duffy, J., and M.J. Gilmartin, "Type and MobilityAnalysis of the Spherical Four-Link Mechanism,"Instn. Mech. Engrs., C87/72, 1972, pp. 90-97.
84. Duffy, J., and M.J. Gilmartin, *Limit Positions ofFour-Link Spatial Mechanisms - 1. Mechanisms HavingRevolute and Cylindric Pairs," J. Mechanisms, Vol.4, 1969, pp. 261-272.
85. Duffy, J., and M.J. Gilmartin, *Limit Positions ofFour-Link Spatial Mechanisms - 2. MechanismsHaving Prismatic Pairs," J. Mechanisms, Vol. 4,1969a pp. 273-281.
86. Gupta, V.K., and C.W. Radcliffe, "Mobility Analysisof Plane and Spatial Mechanisms,' Journal ofEngineering for Industry, Trans. ASME, Series B,Vol. 93, No. 1, Feb. 1971, pp. 125-130.
87. Waldron, K.J., and E.N. Stevensen, Jr., "Eliminationof Branch, Grashof and Order Defects in Path-AngleGeneration and Function Generation Synthesis," Journalof Mechanical. Design, Trans. ASME, Vol. 101, No. 3,July 1979, pp. 428-437.
88. Strong, R.T., and K.J. Waldron, "Joint Displacementsin Linkage Synthesis Solutions,' Journal ofMechanical Design, Trans. ASME, V~o 11, No. 3,July 1979, pp. 477"-487.
89. Sutherland, G.., "Ouality of Motion and ForceTransmission," Mechanism and Machine Theory, Vol. 16,No. 3, 1981, pp. 221-225.
90. Gupta, K.C., OA General Theory for SynthesizingCrank-Type Four-Bar Function Generators with Trans-mission Angle Control,' Journal of Applied Mechanics,Trans. ASME, Series E, Vol. 34, June 1978, pp. 415-421.
91. Gupta, K.C., 'Synthesis of Position, Path andFunction Generating Four-Bar Mechanisms withCompletely Rotatable Driving Links,' Mechanism andMachine Theory, Vol. 15, No. 2, 1980, pp. 93-101.
92. Gupta, K.C., and S. Tinubu, 'Synthesis of BimodalFunction Generating Mechanisms Without BranchDefect," ASME Paper 82-DET-85.
93. Zhuang, X., and G.N. Sandor, "Elimination of theBranching Problem in Synthesis of Spatial Motion
7-15-
Generators with Spheric Joints Part I - Theory,", presentation at the1984 ASME Mechanisms conference and accepted for publication in theTranactions of the ASME.
94. Zhuang, X., and G.N. Sandor, "Elimination of the Branching Problem inSynthesis of Spatial Motion Generators with Spheric Joints Part II -Applications," Presented at the 1984 Mechanisms conference andaccepted for publication in the Transactions of the ASME.
95. Dimentberg, F.M., The Screw Calculus and Its Application inMechanics, Izdat. Nauda Moscow, USSR, 1965. English translation:M , Clearinghouse for Federal and Scientific Information,
1968.4
96. Sandor, G.N., "Principles of a General Quaternion-Operator Method ofSpatial Kinematic Synthesis," Journal of Applied Mechanics, Trans.ASME, Series E, Vol. 35, No. 1, March 1968, pp. 40-46.
97. Sandor, G.N., and K.E. Bisshopp, "On a General Method of SeatialKinematic Synthesis by Means of a Stretch-rotation Tensor, Journalof Engineering for Induatry, Series B, Vol. 91, No. 1, Feb. 1969, pp.115-122.
90. Beran, 1., "The Analytic Synthesis of Linkages in Three DimensionsUsing Dual Complex Numbers,* Masters Thesis, University of Florida,Gainesville, Florida June, 1977.
99. Tsai, L.w., and B. roth, "Design of Triads Using the Screw-TriangleChain," Proceedings of the 3rd World Congress for the Theory ofMachines and Mechanisms, Kupair, Yugoslavia, Vol. D, Paper D-19,Sept. 13-20, 1971, pp. 273-286.
100. Kohli, D., and A.H. Soni, "Synthesis of Spatial Mechanisms viaSuccessive Screw Displacements and Pair Geometry Contraints,"Proceedings of the 4th World Congress for the Theory of Machines andMechanisms, Newcastle-Upon-Tyne, England, Vol. 4, Paper 132, Sept.-Mg 1975, pp. 711-716.
101. Suh, C.H., "Design of Space Mechanisms for Rigid Body Guidance,"Journal of Emgineering for Industry, Trans. ASME, Series B, Vol. 90,No. 3, 1968, pp.499-506.
102. Sandor, G.N., D. Kohli, C. Reinholtz and A. Ghosal, "Closed-FormAnalytic Synthesis of a Five-Link Spatial Notion Generator,'Proceedings of the 7th Applied Mechanisms Conference, Kansas City,Missouri, 1981, Paper XXVI.
i. .- - . - .i *.** .. .* * . 4 . . * .~ ~

' -16-
103. Sandor, G.N., D. Kohli, X. Zhuang and C. Reinholtz,"Synthesis of a Five-Link Spatial Motion Generator,"ASME Paper 82-DET-130, 1982.
104. Fox. R.L., and K.C. Gupta, "Optimization Technologyas Applied to Mechanism Design," Journal ofEngineering for Industry, Trans. ASME, Series B,Vol. 95, No. 2, pp. 657-662.
105. Root, R.R., and K.M. Ragsdell, "A Survey ofOptimization Methods Applied to the Design ofMechanisms," Journal of Engineering for Industry,Trans. ASME," Series B, Vol. 98, No. 3, Aug. 1976,pp. 1036-1040.
106. Rao, S.S., Optimization Theory and Application,Halsted Books, Wiley Eastern Limited, New York,1979.
107. Hartenberg, R.S., and J. Denavit, KinematicSynthesis of Linkages, McGraw-Hill Book Company,New York, 1964.
* 108. Fox, R.L., Optimization Methods for EngineeringDesign, Addison-Wesley, Reading, Mass., 1971.
109. Eason, E.D., and R.G. Fenton, OA Comparison of.Numerical Optimization Methods for EngineeringDesign," Journal of Engineering for Industry,Trans. ASME, Series B, Vol. 96, No. 1, Feb. 1974,pp. 196-200.
110. Roth, B., "The Kinematics of Motion ThroughFinitely Separated Positions," Journal of AppliedMechanics, Trans. ASME, Series E, Vol. 34, No. 3,Sept. 1967, pp. 591-598.
111. Roth, B., "Finite Position Theory Applied toMechanisms Synthesis," Journal of Applied Mechanics,Trans. ASME, Series E, Vol. 34, No. 3, Sept. 1967,pp. 599-605.
112. Chen, P., and B. Roth, "Design Equations for theFinitely and Infinitesimally Separated PositionSynthesis of Binary Links and Combined Link Chains,"Journal of Engineering for Industry, Trans. ASME,S-ries B, Vol. 91, No. 1, 1969, pp. 209-219.
, . . v a o o- l - .". - . , . ** -o. . . .,

-17-
113. Shigley, J.E., and J.J. Uicker, Jr., Theory of Machines andMechanisms, McGraw-Hill, Inc., New York, 1980.
114. Thomas, M., and D. Tesar, "Dynamic Modeling of Serial ManipulatorArms," Journal of Dynamic System Measurement and Control, Trans.ASME, Series J, Vol. 104, No.1, Sept. 1982, pp. 218-228.
115. Hernandez, M.V., "Kinematic Synthesis and Analysis of Three-LinkSpatial Function Generators with Higher Pairs," Ph.D.Dissertation, University of Florida, Gainesville, Florida, 1983.
116. Gmerek, P.L., and G.K. Matthew, "A Closed-Form Solution to a MixedSet of Precision/Approximate Linear Equations," ASME paper82-DET-33, 1982.
117. Duffy, J., Analysis of Mechanisms and Robot Manipulators, HalstedBooks, John Wiley and Sons, New York, 1980.
118. Stitcher, F.C.O., "Mobility Limit Analysis of R-S-S-R Mechanismsby 'Ellipse Diagram'," Journal of Mechanisms, Vol. 5, No. 3,Autume 1970, pp. 393-415.
119. Nolle, H., "Ranges of Motion Transfer by the R-G-G-R Mechanism,"Journal of Mechanisms, Vol. 4, No. 2, Summer 1969, pp. 145-157.
120. Lakshminarayana, K., and L.V.B. Rao, "Type Determination of theRSSR Mechanism," ASME paper 82-DET-119, 1982.
121. Dickson, L.E., Elementary Theory of Equations, John-Wiley andSons, Inc., New York, 1914.
122. Sutherland, G., and B. Roth, "A Transmission Index for SpatialMechanisms,* Journal of Engineering for Machine Theory, Vol. 17,No. 4, 1982, pp. 289-294.
123. Sun, W.H., and K.J. Waldron, "The Order Problem of Spatial MotionGeneration Synthesis," Mechanism and Machine Theory, Vol. 17, No.4, 1982, pp. 289-294.
124. Freudenstein, F., and Sandor, G. N., "Kinematics of Mechanisms,"Mechanical Design and Systei Handbook. McGraw-Hill, 1964, pp.4.1-4.68.
125. Chace, M. A., "Vector Analysis of Linkages," Journal ofEngineering for Industry, Trans. ASME, Vol. 84, Series B, No. 2,May 1963, pp.289-296.
126. Sandor, G.N., "A General Complex-Number Method for Plane KinematicSynthesis with Applications," Ph.D. Dissertation, ColumbiaUniversity, New York, 1959.

7 -"!;--.
-18-
127. Denavit, J., "Description and Displacement Analysis of MechanismsBased on (2x2) Dual Matrices," Ph.D. Dissertation, NorthwesternUniversity, Evanston, Ill., 1956.
128. Ulcker, J. J., "Displacement Analysis of Spatial Mechanisms by anIterative Method Based on (4x4) Natricces," M.S. Thesis,Northwestern University, Evanston, Ill., 1963.
129. Suh, C. H., and Radcliff, C. W., "Synthesis of Plane Linkages withthe Use of Displacement Matrix," Journal of Engineering forIndustry, Trans. ASME, Vol. 89, Series B, No. 2, May 1967, pp.206-217r.
130. Suh, C. H., "Syunthesis and Analysis of Space Mechanisms with theUse of the Displacement Matrix," Ph.D. Dissertation, University ofCalifornia at Berkeley, 1966.
131. Yang, A. T., "Application of Quaternion Algebra and Dual Numbersto the Analysis of Spatial Mechanism," Ph.D. Dissertation,Columbia University, New York, 1963.
132. Sutherland, G. H., and Roth, B., "An Improved Least-SquaresMethod for Designing Function Generating Mechanisms," Journal ofEngineering for Industry, Trans. ASME, Vol. 97, Series B, No. 1,February 1975, pp.303-307.
133. Chen, P., and Roth, B., "A Unified Theory for the Finitely andInfinitesimally Separated Position Problems of KinematicSynthesis," Journal of Engineering for industry, Trans. ASME, Vol.92, Series B, No. 3, August 1970, pp. 531-536.
134. Kramer, S. N., and Sandor, G. N., "Finite Kinematic Synthesis of aCyloldal Crank Mechanism for Functional Generation," Journal ofengineering for Industry, Trans. ASME, Vol. 92, Series B, No. 3,August 1970, pp. 531-538.
135. Freudenstein, F., "Design of Four-Link Mechanisms," Ph.D.Dissertation, Columbia University, New York, 1954.
136. Tesar, D., "The Generalized Concept of Four Multiply SeparatedPositions in Coplanar Motion," Journal of Mechanism, Vol. 3, No.1, 1968, pp. 11-23.
137. Chace, M. A., "Solutions to the Vector Tetrahedron Equation,"Journal of Engineering for Industry, Trans. ASME, Vol. 91, SeriesB, No. 1, February 1969, pp. 178-184.
138. Yang. A. T., and Freudenstein, f., "Application of Dual-Number andQuaternion Algebra to the Analysis of Spatial Mechanisms," Journalof Applied Mechanics, Trans. ASME, Vol. 86, Series E, No. 2, June1964, pp. 300-308.
. _

i7
~-19-
139. Kohli, D., and Soni, A. H., "Displacement Analysis of SpatialTwo-Loop Mechanism," Proceedings of IFToM, InternationalSymposium on Linkages, Bucharest, Romania, June 6-13, 1973.
140. Novodrovskil, E. P., "A Method of Synthesis of Mechanism,"Transactions of the Seminar on the Theory of Machines andMechanism. Akad, Nauk. SSSR 45, 1951.
141. Stepanoff, B. I., "Design of Spatial Transmission Mechanisms withLower Pairs," Transactions of the Seminar on the Theory ofMachines and Mechanisms, Akad, Nauk. SSSR 45, 1951.
142. Rao, A. V. Mohan, and Sandor, G. N., "Closed-Form Synthesis ofFour-Bar Function Generators by Linear Superposition,"Communications of the Third World Congress for the Theory ofMachines and Mechanisms, Yugoslavia, September 13-20, 1971, Vol.G-27, pp. 395-406.
143. Rao, A. V. Mohan, Sandor G. N. Kohli, D., and Soni, A. H.,
"Closed-Form Synthesis of Spatial Function Generating Mechanismsfor the Maximum Number of Precision Points," Journal ofEngineering for Industry, Trans. ASME, Vol. 97, Series B, No. 2,May 1975, pp. 739-747.
144. Rao, A. V. Mohan, Sandor G. N., Kohli, D., and Soni, A. H.,"Closed-Form Synthesis of Spatial Function Generating Mechanismsfor the Maximum Number of Precision Points," Journal ofEngineering for Industry, Trans. ASME, Vol. 95, Series B, No. 3,August 1973, pp. 725-736.
145. Kohli, D., and Soni, A. H., "Kinematic Analysis of SpatialMechanisms Via Successive Screw Displacements," Journal ofEngineering for Industry, Trans. ASME, Vol. 97, Series B, No. 2,May 1975, pp. 739-747.
146. Singh, Y. P., and Kohli, D., "Kinematic Analysis of SpatialMechanisms Containing Lower and Higher Pirs," Proceedings of theSixth OSU Applied Mechanisms Conference, October 1-3, 1979, pp.35-1 to 35-13.
147. Bocher, M., Introduction to Higher Algebra, Macmillan, 1954.
148. Hall, H. S., and Knight, S. R., Higher Algebra, Macmillan, 1955.
149. Alt, H., Werkstattstech, Vol. 26, 1932, pp. 61-64.
150. Bock, A., VDI-Berichte, Vol. 29, 1958.
151. Yang, A. T., "Displacement Analysis of Spatial Five-LinkMechanisms Using (3x3) Matrices with Dual Number Elements,"Journal of Engineering for Industry, Trans. ASME, Series B, Vol.91, No. 1 (February 1969), 152-157.
* '*V4i..*.- .
-20-
152. Soni, A. H., and P. R. Pamidi, "Closed Form DisplacementRelationships for a Five-Link R-R-C-C-R Spatial Mechanism,"Journal of Engineering for Industry, Trans. ASME, Series B, Vol.93, No. 1 (February 1971), 221-226.
153. Dimentberg, F. M., "The Determination of the Positions of SpatialMechanism," (Russian), Acad. Nauk., Moscow, 1950.
154. Dimentberg, F. M., "The Screw Calculus and Its Application inMechanics, Izdatel'stvo "Nauka," Glavnaya RedakstiyaFiziko-Matematicheskoy Literatury, Moscow, 1965.
155. Litvin, F. L., and Gutman, Y. I., "Analysis and Synthesis of aThree-Link Linkage with an Intermediate Higher Kinematic Pair,"Paper Presented to the ASME Design Engineering Conference, BeverlyHills, California, September 28-October 1, 1980.
156. Wallace, D. M., and F. Freudenstein, "The Displacement Analysis ofthe Generalized Tracta Coupling," Journal of Applied Mechanics,Trans. ASM, Series 3, Vol. 37 (September 1970), 713-719.
157. Yuan, M. S. C., "Displacement Analysis of the RRCCR Five-LinkSpatial Mechanism," Journal of Applied Mechanics, Trans. ASME,Series E, Vol. 37 (September 1970), 689-696.
158. Yuan, M. S. C., and F. Freudenstein, "Kinematic Anamatic Analysisof Spatial Mechanisms by Means of screw Co-ordinators," part 1,Trans. ASME, Series B, Vol. 93, No. 1, 1971, pp. 61-66.
159. Yuan, M. S. C., F. Freudenstein, and L. S. Woo "Kinematic Analysisof Spatial Mechanisms by Means of Screw CO-ordinates," part 2,Trans. ASME, Series B, Vol. 93, No. 1, 1971, pp. 67-73.
160. Duffy, J., and H. Y. Habib-Olahi, "A Displacement Analysis ofSpatial Five-Link 3R-2C Mechanisms," Journal of Mechanisms, 1980,pp. 153-169.
161. Duffy, J., and C. Crane, "A Displacement Analysis of Spatial7-Link, 7R Mechanisms," Journal of Mechanisms, 1980, pp. 153-169.
162. Uicker, J. J., J. Denavit, and R. Hartenberg, "An Iterative Methodfor the Displacement Analysis of Spatial Mechanisms," Journal ofApplied Mechanics, Trans. ASME, Series E, Vol. 31, No. 2 (June1964), 309-314.
163. Soni, A. H., and Lee Harrisberger, "Application of (3x3) ScrewMatrix to Kinematic and Dynamic Analysis of Mechanism,"VDI-Berichte, 1968.

-21-
164. Torfason, L. E., and A. K. Sharma, "Analysis of Spatial RRGRRMechanism by Method of Generated Surfaces," Journal ofEngineering for Industry, Trans. ASME, Series B, Vol. 95, No. 3(August 1973), 704-708.
165. Jenkins, E. M., F. R. E. Crossley, and K. H. Hunt, "Gross MotionAttributes of Certain Spatial Mechanisms," Journal ofEngineering for Industry, Trans. ASME, Series B, Vol. 90, No. 1(February 1969), pp. 83-90.
166. Ghosal, A., D. Kohli, and G. N. Sandor, "Kinematic Analysis ofFour-Link Spatial Mechanisms Containing Sphere-Groove andSphere-Slotted-Cylinder Pairs," ASME paper No. 82-DET 123.
167. Goldstein, H., Classical Mechanics. Reading, Massachusetts:Addison-Wesley, 1957.
168. Shigley, Joseph E., Kinematic Analysis of Mechanisms. New York:McGraw-Hi ll , 1959.
169. Ghosal, A., "Analysis of Spatial Mechanisms Containing HigherPairs", Master's Thesis, Completed August 1982, Department ofMechanical Engineering, University of Florida.
170. R.V. Dukkipati and A.H. Soni, "Displacement analysis of RPSPR,RPSRR mechanism," Proc. 3rd World Congress of the Theory ofMachines and Mechanisms, Vol D. Paper D-4, 49-61. Kupari,Yugoslavia (1971).
171. C. Bagci, "The RSRC Mechanism Analysis by 3x3 Screw Generationby Variational Methods," PhD Dissertation. Oklahoma StateUniversity, Stillwater, Oklahoma (1969).
172. V.V. Dobrovolskii, "General investigation of motion of the linksin a seven-link spatial mechanism by the methods of sphericalimages", Trudi Semin. po Teor. Mash. Mekh., Akad. Nauk. USSR12(47), 52-62 (1952).
173. J. Duffy, "An analysis of five, six, and seven-link spatialmechanisms," Proc. 3rd World Congress for the Theory of Machinesand Mechanisms, Vol. C., pp83-98. Kupari, Yugoslavia.
174. J. Duffy, "A derivation of dual displacement equations forspatial mechanisms using spherical trigonometry". RevueRoumaine Des Science Techniques Mecanique Appliquee, Part 1,6(1971); Part 2, 1 (1972); Part 3, 3(1972).
175. M.L. Keler, "Kinematics and statics including friction in singleloop mechanisms by sci-e, calculus and dual vectors. Trans.ASME, series B 95(2), 471-480 (1973).
176. V.K. Gupta, Kinematic analysis of plane and spatial mechanisms.Trans. ASME, Series B 95(2), 481-486 (1973).
- - - - - - - - -- - -
.* , .-.. -..: . .* .
-22-
.7. PPEDICES

Nqti,.mam. d VWbu, flvov Vii 46 pp. .3994 0094-l14xrs& 100+ .00rid is Ginam . 1984 Peapmou, Prm~ Led
-4
KINEMATIC ANALYSIS OF THREE-LINKSPAT[AL MECHANISMS CONTAINING
SPHERE-PLANE AND SPHERE-GROOVE PAIRS
GEORGE N. SANDORI220 MEB. University of Florida. Gainesville, FL 32611I. U.S.A.
DILIP KOHLItUniversity or Wisconsan, Milwaukee, WI 53202. U.S.A.
and
MANUEL HERNANDEZ, Jr. and ASHITAVA GHOSAL§University of Florida. Gainesville, FL 32611, U.S.A-
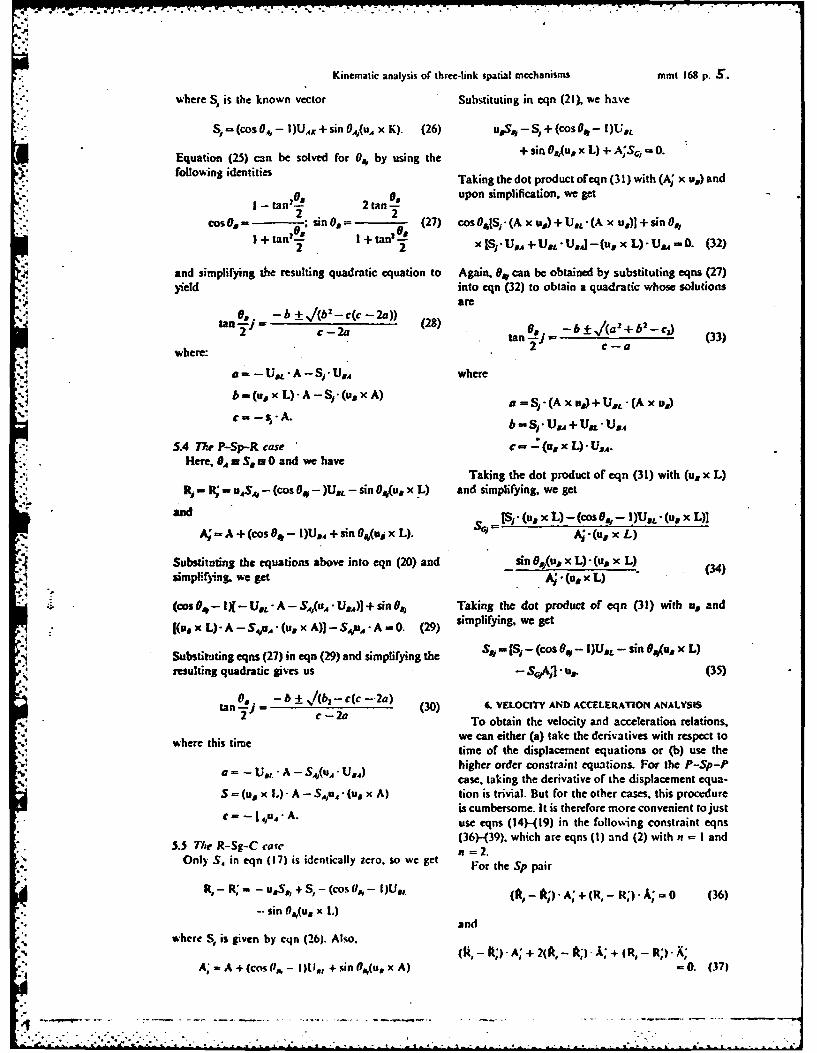
Abstract-Kinematic pairs in a spatial mechanism are viewed either as allowing relative screw motionbetwen liaks or as constraining the motion of the two chains of the mechanism connected to the twoelements of the pair. Using pair geometry constraints of the sphere-plane and sphere-groove kinematicpairs the dislacement. velocity and acceleration equations at derived for, R-,S P-Ar. R-SP -P. P-Sp-p,P-Sp-R and R-SS-C three-link mechanisms. For known values of the input variable. other variablesame computed in dlosed form. The analysis procedures are illustrated using numerical examples.
L INTRODUCrION closed-form displacement relations of RCCC mech-The mechanisms containing higher pairs such as anisms. Wallace and Freudenstein[7] also used vec-cams, sphere-plane, sphere--groove, or lts to obtain dosed-form displacement relations or
- Z cylinder-plane provide the designer with the capabil-. RRSRR and RRPLRR mechanisms.ities of designing machines and mechanisms to satisfy . Yang[8l proposed a general formulation using dualmore complex and exact functional requirements. numbers to conduct displacement analysis of
-than feasible with only lower-pair mechanisms. These RCRCR spatial five-fink mechanisms. Soni andmechanisms in geeal are compact and contain Pamidi [9) extended this application of (3 x 3) matri-
1:*s fewer links than those with lower pairs. ces with dual elements to obtain cl'osed-form dis-*I'm recent years, there has been considerable devel- placement relations of RCCRZR mechanisms.
opatent in the tools for kinematic analysis of spatial Yuan[OJ employed screw coordinates to obtainmechanisms containing lower pairs. closed-form displacement relations for RRCCR and
Kinematic analysis of space mechanisms was ini- othe spatial mechanisms.tiated by the significant contribution of Jenkins and Crossleyl I I] Sharma andDimentberg~l]. Dimentbergj2, 31 demonstrated the Torfasn[121, Dukkipati and SoniEl31 used theuse of dual numbers and screw calculus to obtain method of generated surfaces to conduct analysis ofclosed-form displacement relationships of an single loop mechanisms containing revolute, pris-RCCC j and other four-, five-, six- and seven-link matic, cylinder, helical and spheric pairs. Herzenbergspatial mechanisms containing revolute, cylinder, and Denavit[14J contributed iterative techniques toprismatic and helical pairs. Denavit[4) derived conduct displacement analysis of spatial mechanismsclosed-form displacement relationships for a spatial using (4 x 4) matrices containing revolute, prismatic,RCCC mechanism using dual Euler angles. Yang(5) cylinder, helical and spheric pairs. Uicker[l 51 ex-also derived such relationships for RCCC mnech- plored in further detail the (4 x 4) matrix approachanisms using dual quaternions. of Hartcnberg and Denavit. Soni and
Vectors were first used by Chace[61 to derive Harrisberger[l61 contributed an iterative approachfor performing kinematic analysis using (3 x 3) with
_________ dual elements. Kohli and Soni[17. l81 used finitetResearch Professor of Mechanical Engineering, screws to conduct displacement analysis of single-OAsocate Professor of Mechanical Engineering, loop and two-loop space mechanisms involving R. P.§Griduate Research Assistants in Mechanical En- . 1, and S pairs.
pineng.R: revolute. P': prismatic. C: cylindric. S: spherical. Sp: Bagcif 191 used a (3 x 3) %crew matrix for displace-
spherc-plane and Sg: sphere-tiroove joini. ment analysis of a mechanism containing tw~o revo-
mint 168 p.1.

mint 16S p. 2. GmOito N. SA.*UO et at.
lute pairs, one cylinder pair and one spheric pair. Step 5. Force the cylindrical (C) joints as revoluteDobrovolski[20] used the method or spherical images (R) or prismatic (P) joints by setting the sliding or theto analyze spa-r mechanisms containing revolute and rotation equal to zero at cylindrical pairs.cylinder pairs. Duffy[21,22. Duffy andHabib-Olahi[23 used the method of spherical tman- 2. THE THREE-LINK MiECHANIS,M AND ASSOCIATEDSks to derive displacement relations for five and six VECWRl
link mechanisms containing involute and cylinder Figure I shows the initial position or two rigidpairs. Keller[25) and Gupta[26) also analyzed space bodies grounded via cylindrical pairs and connectedmechanisms containing revolute, prismatic, cylinder, together by a sphere-plane pair. Also shown are thehelical and spheric pairs. Recently Kohli and following vectors and scalar quantities:Soni[26) and Singh and Kohlit2"1 used the method of u, unit vector defining the direction of the axis ofpair constraint geometry and successive screw dis- cylindric pair A.placements to conduct analyses of single and multi- u, unit vector defining the direction of the axis ofloop mechanisms. cylindrical pair B.
In the present paper, screw displacements ex- P vector locating the axis or cylindric pair at A inpressed in vector form and the pair geometry con-. the fixed coordinate system.straints. also expressed in vector form, are used to Q vector locating the axis of cylindric pair at B inderive the displacement, velocity and acceleration the fixed coordinate system.equations for R-Sp-R, R-Sp-P. P-Sp-R, P-Sp-P A unit vector perpendicular to the plane of the Spand R-S-C three fink mechanisms. pair embedded in body 1.
Since Revolute (R) and Prismatic (P) pairs are A' vector embedded in body 2, congruent with A inspecial cases of the cylinder pair (in prismatic pairs, the starting position, as shown in Fig. i.the rotation is zero; for revolute pairs sliding is zero). R vector locating point R, the sphere center in thewe derive the analysis. equation for C-Sp-C and fixed coordinate system.C-Sg--C mechanisms, and then force rotations or 0
a rotation of link I about axis u.translations at one or more pairs to zero. to obtain 0, rotation of link 2 about axis u,.the equations for the above described three-link one SA translation of link I along axis u.degree of freedom mechanisms. S# translation of link 2 along axis u.
Briefly, the procedure for obtaining the analysisequations is as follows. Figure 2 shows the C-Sg-C mechanism with all
Step 1. Consider the C-Sp-C mechanism and the associated vectors and scalars. Description of allC-Sg-C mechanism. parameters are the same as for the C-Sp-C mech-
Step 2. Separate the two moving links (Bodies I & anism except for the direction of the vector A, which2) at the sphere-plane pair for the C-Sp-C case and is now along the direction of the groove and also theat the sphere-grove pair for the C-Sg--C. addition of So, which is the translation of the sphere
Step 3. Use the screw displacements in vector form along the direction pfA .. _.. . ... .to describe the new ('th) position of the sphere-plane(Sp) or sphere-groove (Sg) pairs from two sides of 3. PAIR GEOMETRY CONSTRAINT EQUATIONSthe pair. Figures 3 and 4 show a sphere-plane (Sp) pair and
Step 4. Use the pair geometry constraints on the a sphere-groove (Sg) pair with the vector R locatingposition of the pair obtained from two sides. R, the sphere center. The vector A, in the Sp pair is
defined as a vector perpendicular to the plane inwhich the sphere moves. In the Sg pair, the vector Adefines the direction of the groove.
Z S,
Fig . I. C'-'¥ C mnechjniim. Ia. 2. C-S$--C ,mechanism.L .
P S
. . . . . .. . . . . . . . '. . - -2

Kinematic analysis or three-link spatial mechanisms mmt 168 p. 3.
We can now define the vectors R, A1, R and A,. After some displacement of the mechanism, theseThese new vectors will define the displaced position vectors, in general, will separa'e due to the relativeand direction of initially coincident point R and motion of the joint elements. Noting that both bodiesvector A in bodies I and 2 respectiveily after some I and 2 are connected to ground by C pairs, we userelative motion between bodies I and 2. The prime the equations developed by Kohli and Soni[26] fornotation here is used for new position expressed from expressing the direction of a vector embedded in thethe motion of body 2, whereas the unprimed no- rigid body and also the displaced position of a pointrations are used for new positions expressed from the of the body after a rotation 0 about the cylinder axismotion of body 1. and a transition S along the same axis. Using the
The pair geometry constraint equation for the Sp prme notation for positions of the vector A' obtainedpair ist from the motion of body 2 and the unprimed no-
tation for positions of vector A (assumed frozen innO___(( body I in the first position and then moving with
W -2body 1) from the motion of body 1. the displaceddirections of the vector A in bodies I and 2 are
which expresses that any relative motion between thesphere and the plane must be perpendicular to the A, cos 0,,JA - (A- a,)ul + sin 0,, x A).vctor A; (Fig. I).
The pair geometry constraint equation for the Sg + (A- u)u (3)pair is A; = cos 0JA- (A- u,)u,] + sin 0,,(ua + A)
dR(2 d'R) d + (A u,)u, (4)•~~ _ A!So,) n = 0, 1, 2 .... 2Also. the displaced position of the point R in rigid
where Scj is the translation of the sphere along the bodies I and. 2 are given by:groove in the direction of A;. The constraint equationfor the Sg pair expresses that any relative motion R= cos OB(R - P) - ((R - P)- u4] + sin Os,,between the sphere and the groove must be along the - P)) + [(R - P) uJluU
X (uA X(R-))+R ) JUgroove which is in the direction of A; (Fig. 2). + V'" + Ps+n (5)4. WORKING EQUATIONS
Referring to Fig. 1, let A be a vector in body I A' R,=cos0[(R-Q)-((R-Q).u,)us]+sin 0,a momentarily congruent vector in body 2 in the firstposition, perpendicular to the plane of the Sp pair. x (ui(u, x (It - Q)) + [(R - Q)- ua]u,
+ aS 4 -+ Q. (6)
Using the identity [A - (A" uAuA = (U. x A) x uA,introducing the vectors
-. K=R-P
*- L=R-Q
and the following notation for any two vectors u, andA D).
Fig. 3. Sphere-plane (S,) pair. Uc, (Uc x D) x Uo. (7a)
we can substitute eqns (7) and (7a) into eqns (5) and(6) to get
R,= R + uAS, + (cos O,,- l)U4 X + sin 0(uA x K)
(5a)A
Rand
Fig. 4. Sphere-groove (S,) pair. R; = R + uS, + (cos 0. - I)U8 ,. + sin 0,,(u, x L).(6a)
Vt. Appendix for the derivation from the complete We now lake the time-derivatives of equations for R,contraint equation, and R; and using the notation of dots above the! '
• ' -- - - . ... .. . . . . . . . . . . . .. . . . .. . . . . .. ... . . .

7.~~ 7 .-6 -1-
-," mint 36, p. GoRmGE N. SA ,,0 er at.
variables to indicate time derivatives, we obtain the For the Sp pair,:oloing equations
.(-R' ( - R-) - , 0- (20)
uS,, + [cos o,(u, x K) - sin 0.,u#Aj, (8)For the Sg pair,
.t; - u,. , + [cos 0 ,(u, x L) - sin G,,ua1,t. (9) (Rj - ;) - A; Sos (21)O[cos O4 tUnx + sin 04tau. x K)10,s(20 a 2arS) d (2x)
[cosu+[ ,Ou xK)-sin~u,,Io-A (10) Observe that eqns (20) and (21) are eqns (1) and (2)+ with nt =0.
uS. - [cos OU, + sin 0 x L)10 The cylindrical pairs used in the derivation may beS - [nforced to work as prismatic (P) pairs by letting 0 a 0+ [cos 0,(u, x L) - sin 0BUajUL,- (I1) or may be forced to work as revolute (R) pairs by*l letting S -= 0.
substituting eqn (7a) into eqn (4). using eqns (5a) and
(6a). and by making the following substitutions 5.1 The P-Sp-P case
For this mechanism, we use V,. m 6, a 0 and eqnsN1 = cos OA(u, x K) - sin OAUk (14) and (17) are simplified to
(12)My = cos 0,,(u,, L)- sin 0,,U,, Rj - u, SV - us.,
andNj = cos O,,U,, + sin O.,(u, x K) A; = A.
(13)NV - cos 0U&, + sin O4(u, x L), Substituting in eqn (20), we get
we can derive the following working equations (uS 4 - uS4)- A = 0 (22)
A; - A + (cos 0, - I)Uju + sin O8(u, x A) (14) which simplifies to the input/output equation
[cos 0(u, xA) -sin UAu,, = VJh (B5) S, .. (23)
[C =[os 0.&n x A) - sin o,,U. #*A
-[cos O*Ux + sin Os,(u, x A)J0, 5.2 The R-Sp-P cw
", is the input; Sa is the output and 0, S S, a 0.. ": ; =V - W. (16) Equations (14) and (17) with 0, m S, S 0 substituted
in eqn (20) provide.4 . te *re4 w [-ere -nS (CO0 - I)U- + sin ,(,a x-K))- A = 0.---
and V, - cos 0,(u, x A) - sin 0,U,, A we obtain
., W 4 = cos OUA + sin 0s,(u, x A) . =[(cos 0,V .- I)U, + sin 0,,<u, x K)] - A.24
R, - R=A, + (cos ,aj - )U.X + sin 0,(u, x K) u.2A
-uIS 4s-(cos0, s - I)UL 5.3 The R-Sp-R caseWe have for this case SA Ss m 0, and eqn (14) and
(17) are simplified to obtain
f,- A; U u4.14 + MJ- ,, U -_I1 M 1d, (18) R- R= (cos 0.- t)U.A + sin O,(uA x K)
- ,-; = ,-NA,,,+N ,,, -(cos 0s- )U, -sin 0,,(ux L)
-- u1, + N,112 - NI,O' (19) and
S WSPI.ACEMF.NT ANALY'SISTo analyse the displacements or a particular 3-link A, A + (cos 0,- I)U,4 + sin Oa,(u, x A).
one-degree-of-frcdom mechanism containing either Substituting the above equations into eqn (20); andthe Sp or Sg pair, we need only to take working eqn(I7). apply the constraints of the particular grounded simplifying the resulting equation, we obtainpairs and then substitute the results into the followingpair geometry constraint equations for displace- - I -A + (cos 0s - IX - Us. A - S, U 4 1
Ments. + sin O,(u a x L)- A - S," (us xA)1 0 (25)
el,' ' .' ", ' "-" .- ." ." " , " • " -". ". " '" , , , , '. . .. . .. ... . . . . . " ' -. ." . . . . ... .. . . . . .. ..
Kinematic analysis of three-link spatial mechanisms mint 168 p.
where S, is the known vector Substituting in eqn (21). we have
S, = (cos 0 , - I)U.x + sin 0,,(u, x K). (26) uS- S + (cos0 - I)U.
Equation (25) can be solved for 0s, by using the + sin 0,,(U, x L) + ASci 0.
follobing identities Taking the dot product ofeqn (31) with (A; x us) and
I . -" upon simplification, we getI', -tan- 2tan-
cos 02 = i; sin 0, 2 (27) cos 0,[SI - (A x us) + UL, -(A x us)] + sin 0s,ta2 8_*I + tan- +tan
22 x IS, UA + U&L" UJ- (us x L)" UsA - 0. (32)
and simplifying the resulting quadratic equation to Again, #, can be obtained by substituting eqns (27)yield into eqn (32) to obtain a quadratic whose solutions
- are0' . - b +_/(bl - c(c - 2a))
-- tan 2j(8 , = b -11a 2 + b - cz) (33)
where: n2 j c-aU -UL A - Si" Us where
b = (u x L) A - Sf (u, x A),a = S -(A x us)+UL. -(A x-us)sc - s, A.
5.4 77e P-Sp--R case c€ - (as x L)" UA.Here. 0, a S. w 0 and we have
Taking the dot product of eqn (31) with (us x L)'n " - (cos 0," - )U&L - sin 0",(u, x L) and simplifying, we get
. A; -A + (cos go - I)U,, + sin 04(us x L). a, xL)- (cos e,- 1)U. ("I x)
A (us x L)
Substtuting the equations above into eqn (20) and sin 0,,(u, x L)- (up x L)simplif)ing, we get A- (uxL) 3
(cos 0,- l)- UL -A - S,,(u,. UA)l + sin V, Taking the dot product of eqn (31) with u, and
[(as x L)- A - $ u, (us x A)) - S, ,A A - 0. (29) simplifying, we get
Substituting eqns (27) in eqn (29) and simplifying the S [Si - (cos - I)U&L - sin Os,(u, x L)
resulting quadratic gives us -S,$Ai • . (35)
tan = - -b /(b -c(c2a ) (30) 6. VELOCITY AND ACCELERATION ANALYSIS
nTo obtain the velocity and acceleration relations,
heiiwe can either (a) take the derivatives with respect to.' where this time• .time of the displacement equations or (b) use the
-Us, A - SAu 4 U. 4 ) higher order constraint equations. For the P-Sp-P•case, taking the derivative of the displacement equa-
S = (us x 1.)- A - S,,u, -(us x A) tion is trivial. But For the other cases, this procedure
C - A. is cumbersome. It is therefore more convenient to justuse eqns (14H19) in the following constraint eqns
5.5 The R-Sg-C (36)-(39). which are eqns (1) and (2) with n = I and
Only S, in eqn (17) is identically zero. so we get For the Sp pair
R,-R,.= -R uSs, + S,- (cosO4- I)UL (f,- ft;)-A;+(R,- R;)-A; =0 (36)
-- sin 01(u x L)and
where S, is given by ¢qn (26). Also..- (,-R;). A; + 2(A, - A;)A; + JR,- . ( 7;
""A; A + (cos 0, - I)El1., + sin 0., x A) -0O. (371

,%p j
.mint 168 p. 1. GEORGE N. SANDOR e at
For the .T pair where
k; =A + A; S(3S) D .M.*- A;-(Rj- R)-V.. (46)
andR- It X;Scj + 2A S + A;. O (39) 6.4 The P-Sp-R case
Equations (18) and (19) are
6. The P-Sp--P caseHere we can use the time derivatives of the dis- A; - A; -u -M6.,
placement equation to get t,- u.9, u,+ NIj,- M/,i
= A also.
A;-.V, and VJ.- s,-#w4o.
A (40) Substituting in eqns (36) and (37) we get
(41) A, (47)
62 The R-Sp-P case andEquations (18) and (19) become
1%,- 1k; = M,4 -. US.- D (u-f .+ 2(.v- v*)V'and A (N -A'- 2NMI,- V,
also .... N 4 +M,69 v, W (48)
A;= 1 A =. A 0- where Dis given by equ(46).
Sabstittadng in eqns (36) and (37), we get 6.5 The R-Sg-C case
Only S4. S,, and . are zero and eqns (18) and (19)
and.* A ~(42) become:
.. -A #
.NAJ 0"lM AJAM (43) and
iiA a'.N+ . 4 1 U
6.3 The R-Sp-R case +No _ j- N....
S a S s .s aj.. ,, .S o, also,
Equations (18) and (9) become V,, and X - - 1VSO1.
Substituting the expression for (A, - lA.) just obtained
and into eqn (38) we get
l - s = -N 'A + M, + M4,6,. , -. - ,= A;.I. + V,,S 6 (49)Also.
A; V.#. A;- Vx6r - 01,. S. and , are unknowns in eqn (49).Taking the dot product of eqn (49) with (A. x u,).
Substituting in eqns (36) and (37). we get we get
M,"A; ( (MA,0, - NIA.,) • (A; x u) = V,- (A; x u,)6,,,, ,- A; - (R, - R,) -V,O ) or
and Mq,- A, x u. (50)
A' + MA ,. A' 2l 1' (SV , + N,)- A; x u"
Aa D d41 D D) dNow, taking the dot product or cqn (49) with
N," A, - 2M," 2M," V4 - (R, - R,)- W4 [A; x (S,, V+ N+ ,)I. we have
(45) (M 4 ., - u.S)" A; x (S,.,Vm, + NJI,) -0
" --.... i... ..- ,7. ...

I I l I.. -. , ., . , . . -. . • .. . - -- - . . . . .
Kinematic analysis of three-link spatial mechanisms mint 168 p.
or Letting X be equal to the r.h.s. of eqn (53) and byusing the same technique of taking the dot product
-. Mi4 - A; x (SQYV+ M,) O (5) of eqn (53) with the proper cross-products, we willw i, . A; x (SV* + M,) obtain the following
Again taking the dot product of eqn (49) with X - A x u (54)iE ( x (Sta4 + M)+x
go X~ X- A; X (SGJV* + INI4)55we have w, -A; x (SQ., + MN
(Mqpi~v - A,~) 3a x (SQsv + M,) 0 1 Xux (S1 V4 ,-*MR) (56); - u, x (SV,+ M,)
-or
7. NUMERICAL EXAMPLESN, - Up x ($€IV4 + Me2) I. Analysis or a R-Sp-R mechanism.A; ' . x (4V,+Y4 -Me) " The sectors describing the mechanism are
Acceleration: Substituting the expression for u,=0;+l+0,(1k - A? obtained earlier for the R-Sg-C case intoeqn (39. we will Set u.= (3+ lJ+O0)lf1(l0)
-N, + M ,,f- U~e + N, ,2*- M,,je Q - 0 i + 0.75k
-VA (v - wAD , + 2vO,44 + A;9Cj RP- U + ,4f +or A - O + 01 L
ug , + A;S§ + (ScqjV + Ma) 0, The plot of the output displacement (8,). velocity
- - N, j+ M/, + +( and acceleration (.) are given in Fig. 5.8 2. Displacement. velocity and acceleration analysis
-2V,0,$q (53) of a R-Sg-C mechanism.
-4 ..-
VitOCITT
A1
] ACCtI&ATIOM*
Fil. 5. Plot of 0.. 0E and if, ror the R-S,-R mchanim.
mint 169 p . GEor.A N. SA.mm ct at.
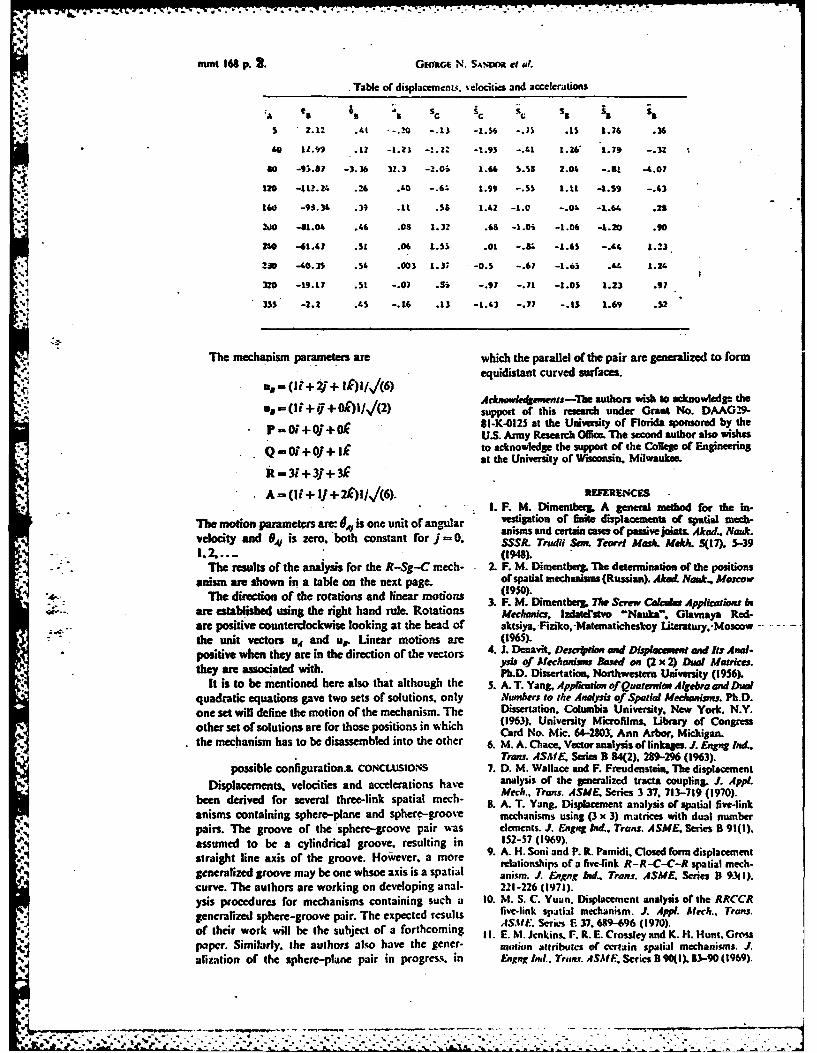
Table or displacements. velocities and accelerations
A, e 1 , 11 sa S i I s a is s
S 2. 2 .4t --.- -. 13 -1.56 -. 1 .15 1.76 .36
40 11.99 .1! -1.21 -. Z" -1.95 -. 4.1 1.26" 1.9 -. 3Z
so -9i.31 -3.3, 32.3 -2.0. I.", 5.s 2.04 -.81 -4.0712 !0 -111.. Z-4 .26 AD. -.6Z 1.99/ -. 55 1.11, -t.$9 -. 43
160 -.9J.34 .3 At .56 1.2 -1.0 -.0& -A.6" .2s
390 -11L..04 .46 .03 1.32 .63 *1.0io -1.06 -1.20 .90
20 -61.471 .51. .06 JL.51. .01. -. 31, -1.65 -. 414 1.23.
23. -,.0.35 .54 .003 1.3; -0.5 -. 1 -. 6$ .6,. 1.2.
320 -19.17 .51 -. 07 .36 -. 91 -. 1 -1.05 1.23 .917
335' -2.2 .45 -.1K .13 -L.4.3 -. 77 -IS 1.69 .52
The mechanism parameters are which the parallel of the pair are generalized to formequidistant curved surfaces.
Ak- wkdge2)ts-Te authors wish to acknowledge thesupport of this research under Grant No. DAAG-19-
P-0+01 0f 81-K-0125 at the Uiversity or Florida sponsored by theUS. Army Research Office. The second author also wishes
Q 0 i0oj+ IO J to acknowledge the support of the College of Engineeringat the University of Wisconsin. Milwaukee.
A -(I i + 1] + 2k)II ,(6). nEFUENCES... I. F. M. Dimentber A eneral method for the in-
The motion parameters are: 6, is one unit of angular vestigation or finite displacements of spatial mech-anisms and certain case of passive joints. Akd.. Nauk.
velocity and 0, is zero, both constant for j 0. SSSR. Trudii Se.. Teeori Mashk Mekh. 5(17). 5-391.2...- (1948).
The results or the analysis for the R-Sg-C mech- 2. F. M. Dimentberg. The determination o the positionsanism are shown in a table on the next page. of spatial mechanism (Russian). Aka& Nm,k., Moscow
- The direction of the rotations and linear motions (1950).esalse3. F. M. Dimentberg 71e Screw Cakdus Applications in
ar established using the rigt hand rule. Rotations Mechanics, lzdatd'stvo "Nauka", Glavnaya Red-are positive counterclockwise looking at the head of aktsiya, Fiziko,-Matematicheskoy Liuatuy..Moscow ..
the unit vectors u,4 and u,. Linear motions are (1965).positive when they are in the direction of the vectors 4. J. Denavit, Descrflmo and Displacemet and Its Anal-
y*s of Mechanisom Based on (2 x 2) Dual Matrices.they are associated with. Ph.D. Dissertation., Northwestern University (1956).
It is to be mentioned here also that although the 5. A. T. Yang, Appratio of Quotemio Algebra and Dualquadratic equations gave two sets of solutions, only Numbers to the Analysis of Spatial Mechanis. Ph.D.one set will define the motion of the mechanism. The Dissertation, Columbia University, New York. N.Y.other set of solutions are for those positions in which (1963). University Microfilms. ULbrary of Congress
Card No. Mic. 64-2803. Ann Arbor, Michigan.the mechanism has to be disassembled into the other 6. M. A. Chace, Vector analysis of linkages. J. Engng Id..
Trans. ASME, Series B 84(2), 289-296 (1963).possible configuration.s. CONCLUSIONS 7. D. M. Wallace and F. Freudenstein. The displacement
Displacements, velocities and accelerations have analysis or the generalized tracta coupling. J. Appi.Mech.. Trans. ASMUE Series 3 37. 713-719 (1970).
been derived for several three-link spatial mech- &.A. T. Yang. Displacement analysis of spatial five-linkanisms containing sphere-plane and sphere-groove mechanisms using (3 x 3) matrices with dual numberpairs. The groove or the sphere-groove pair was elements. J. Engng Ind.. Trans. ASME. Series B 91(t).assumed to be a cylindrical groove, resulting in 152-37 (1969).straight line axis of the groove. Hovever, a more 9. A. H. Soni and P. R. Pamidi, Closed form displacement
relationships of a five-link R-R-C-C-R spatial mech-generalized groove may be one whsoe axis is a spatial anism. A. ..Egng lad.. Trans. ASME Series B 93(1).curve. The authors are working on developing anal- 221-226 (1971).ysis procedures for mechanisms containing such a 10. Nt. S. C. Yuun. Displacement analysis of the RRCCRgeneralized sphere-groove pair. The expected results five-link spatial mechanism. J. App. Mech.. Trans.
ASMIE. Series E 37. 689-696 (1970).of their work will be the subject of a forthcoming II. E. NI. Jenkins. F. R. E. Crossley and K. I. Hunt. Grosspitper. Similarly. the authors also have the gener- rmtion attributes of certain spatial mechanisms. J.alization of the sphere-plane pair in progres. in tgt /mtl.. Tram. ASAIE. Series B 900),83-90(1969).

Kinematic analysis of three-link spatio! mcchdrikms mmt 168 p.
12. L E. Torfasom and A. K. Sharma. Analysis or spatial VelocityRRGRR mechanisms by the method or generated str-ae. I. Emag 1,d.. Tran. ASME. Seies 8 93). , k-; = ,. + Sw", (c)704-708 (1973).
13. R. V. Dukkipati and A. H. Soni. Displacement analysis andof RPSPR, RPSRR mechanisms. Proc. 3rd World Con-ress of t Thery of Mam. ad ,echanis. Vol. *,-A; + -A, - 0 (d)IX Paper D-4. 49-61. Kupari. Yugoslavia (1971).
14. R. S. Hartmbeug and J. Denavit. Kinematic Synahesis of Accelertion:Lamqes. McGraw-Hill, New York (1%4).
IS. J.. Uic kr.J. Denavit and R. Hartenbeg. An iterative + - t -S,,a4- 2_1,/4 + SA, (C)method for the displacement analysis of spatial mech-afins,. I. AppL. Meek. Trm. ASME. Series E 31(2). and309-314 (1964).
I& A. H. Soni and L HarrhbgrW, pplication of (3 x 3) I; -A, + 2;,-.A, + uL,- 4; - 0. (screw matrix to kinematic and dynamic analysis ofmechanism. VDI-firchte (1968). The constraint eqns (a)-( are complete in the sense that all
17. D. Kohli and A. H. Soni. Displacement analysis of of the important variables in the motion of thejoint elementsspatial two-loop mechanisms. Proc. IFToMM lea. Sym- are included. Also, the Coriolis component in the ace-
- psle on Linkages. Bucharest, Romania (1973). leration constraint eqn (I) is evident since A; is a function1". D. Kohli and A. H. Soni, Displacement analysis of or d.
single-loop spatial mechanisms. Proc. IFToMM Int.Symposhm on Linkaes. Bucharest, Romania (1973). 2. Proof that (d/dt*((. - Rj) - Aj -0 n - 0. 1. 2 satisfies
19. C Bagci. The RSRC Mechanism Analysis by 3 x 3 the complete Sp pair constraint equationScrew Matrix. Synthesisfor Screw Generation by Vari- Without loss of generality, we can let Sy = S,,u4 andatinaal Methods. Ph.D. Dissertation. Oklahoma State write the complete constraint equation asUniversity. Stillwater, Okahoma (1969).
20. V. V. Dobrovolskii. General investigation of motion of -( d-the links in a seven-link spatial mechanism by the d-*(r-il)-W; (S n ) (a)method of spherical images, Trudi Semin. po Tear.Mash. Mekh.. Akad. Nawk. USSR 1247), 52-62 (1952). and
21. J. Duffy, An analysis of five, six and seven-link spatialmechanisms. Proc. 3rd World Congreis for the Theoryof Ma Ainn and Mechanisms, Vol. C. pp. 8-98. Ku- A,) 0 0. (b)pa. YugslaviLa.
22. J Duffy. A derivation of dual displacement equations Displacement: For a -0. eqn (a) and (b) arefor spatial mechanisms using spherical trigonometry.MireRemnabi Des Science Techniques Mfeanique ,- R) - So (C)Applquer. Part I. 6 (1971); Part 2, 1 (1972); Part 3. 3 and(1972). s,,- A;-. (d)
23. J. Dulfy and H. Y. Habib-Olahi. A displacement anal-),sis of spatial fivenlink 3R-2C mechanisms. . Mech. Taking the dot product of eqn (c) with A; gives us thePart I. 6. pp. 119-134 (1971); Part 2. 6. pp. 463-473 displacement constraint equation for the Sp pair.(1971); Part 3. 7. pp. 71-44 (1972).
24. M. L Keler, Kinamaticsand statics including friction in (Ij - N) - A, - 0.single loop mechanisms by screw calculus and dualectos. Trams. ASME Series B 95(2), 471480 (1973). Velocit,: With s -1i eqos (a) and (b) will become
25. V. K. Gupa, Kinematic analysis of plane and spatial
mechanisms. Trs. ASME. Series B 95(2). 481-486 -, (I)(1973). and
26. D. Kohli and A. J. Soni. Kinematic analysis of spatial ;- A - - Sy- );. ()mechanisms via successive screw displacements. J. En-"og Ind.. Trans. ASME Series B 97(2). 739-747. Taking the dot product of eqn (r) with A; gives us
27. Y. P. Singh and D. Kohli, Kinematic analysis of spatialmechanisms containing lower and higher pairs. Proc. (A - k)- A; - S; -A. (h)6tk OSU Conf. of Applied Mechanisms, pp. 35-1 to35-43 (1979). Substituting eqn (g) into (h). wit have
APPENDIX (t,- t;) A= - s,- A,. (i)I. Sphere-plane co-tatraint equation
The complete displacement contraint equations of the Equation (c) can now be substituted in eqn (i) to getSp-pair are
R,- R,= $,,,, (a) or
Sa;M=0 (b)which i. really
where a; is a unit vector in the plane of the Sp pair.perpendicular to A; and is in the direction of the relatie dmotion of point R of body. I with resr.ect to the initially -[R,-R;-A;= . k)coincident point R of body 2.
Derivatives o equations (a) and (b) with respect to time Ace'eretti.ni: For n -2. cqns (a) and (b will beare taken to give the following velocity and accelerationc.'notraint equations -
*s o*% % -,% %. " . -. o. .o " -. ".. .-. . . . . . . . . . ..

N MIn 163 P. A GEORtGE N. SANDOR et a.
and or
Taking the dot product orteqn (1) with A, and substituting Substituting eqns (c) and (f) into eqn (a) gives us
from equ (im). we wiB1 ge Which is2
(R, -IA; ,- - 2 ,,--i- ,, (R, - R?.- A1 -0. (0)
XNALYSS C142MATIQIJE DES MECAN4ZSMES SP14TlAUX A T;OIS BARtES CONTE4N~T LES PAIRES SPHERE-PLANCT S?HERE-RAINCRE
G.N. Sandor, D. Kohi. K. Hternandez, Jr.,* A. GhosaI
Rork- On consid.%re %jdn~raIame,L qu'unt pazre dans un L-canisme apatial permet un Uouve-sent relatit do vis entre 1.. me~rbres, Ou ;u*ello restraint I. naouvement des 41lrments quilut *:At reljt's.
En wriploy.nt lea contraintes q#omtriq-.zs des paires de sphlre-plan et de sphbre-rainur* cinfaiatiques. Its dquatimms pou.r It d~p1ace.-:nt, Ia Vitesse at Ilacclfration sontdfritles pour lts rn~cAnsmes avec ecois vrrbres R-Sp-R. R-Sp-P. P-Sp-P. P-Sp-R et R-Sr-C(2: r4volute; P: prina'atique; C: cylndriqu*; S: spha~rique; Sp: aphbre-plan; Sr: sphere-rainure). Pour les valour. connues do I& variable dentrfe. ;.a autres variables sont cal-y ul4Fes par des forrules non-it4ratives. Le prochdf d'analyse eat illustr6 par des exemples
AA

345 E. 47SL, New York. N.Y. 10017
S The Soy shelf not reepnble for stalementa or opinions advenced in papers or indiscuso a meetings of the Society or oits Divisions of Sectoers, or printed in itspublicatiOns, Olcussion Is printed only If the paper Is published in an ASME Journal.Released for geneirl publication upon preenlatilon. Full credit should be given to ASME,the TachnIcal Division, and the buthoiij) Papers re available from ASME for nine monthsafter the meeming.Printed in USA.
KIVEMATIC &NALYSIS OF FOUR-LINK SPACE MECHANISMS CONTAINING SPHERE-GROOVE AND SPHERE-SLOTTED-CYLINDER HIGHER PAIRS
ASHITAVA GHOSAL DILIP KOHLI GEORGE N. SANDORResearch Assistant Associate Professor Research Professor and Director
Department of Mechanical Engineering of Mechanical Engineering Mechanical Engineering Design andUniversity of Florida University of Wisconsin - Milwaukee Rotordynamics Laboratories
Gainesville, Florida
The geometric constraints of two higher pairs, namely sphere-groove and sphere-slotted-cylinder, are derived.Using these pair geometry constraints, input-output relationships are derived for several mechanisms containingsphere-groove and sphere-slotted-cylinder pairs. The input-output equation for the R-Sg-R-R linkage is obtainedas a fourth degree polynominal in the half-tangent of the output crank angle. For other cases of mechanisms con-taining a sphere-groove pair (such as R-Sg-R-P, R-Sg-P-R) the input-output equation is quadratic. The input-outputequations for the R-Sc-C-R and R-Sc-R-C are obtained as eighth degree polynomials in the talf-tangent of their
* output angles. For mechanisms with prismatic output containing a sphere-slotted-cylinder pair, the input-outputequation is a second degree polynomial in the output translation.
2. TIhRODUCTION Vectors were first used by Chace [7,8] to obtainvector equations for position, velocity and accelera-
Mechanisms containing higher pairs such as cams, tion analysis.
sphere-plane, sphere-groove or sphere-in-slotted-cylinder, provide the designer with opportunities for Yang [91 used dual numbers to analyze RCRCR fivedesigning mechanism and machines to satisfy more link spatial mechanisms. Soni and Pamidi [10] extendedcomplex and exact functional requirements than fea- this application of (3x3) matrices with dual elementssible with only lower pair mechanisms. Higher pair to obtain closed-form displacement relationships for
mechanisms in general are compact and have fewer RRCCR spatial mechanisms. Soni, Dukkipati and Huanglinks. [11] also used (3x3)matrices with dual elements to
analyze 6 link single loop and two loop spatial mecha-In recent years there has been considerable nisms containing revolute, prismatic and cylindrical
development in tools for kinematic analysis of spa- pairs. Yuan [12] developed the use of screw co-ordi-
tial mechanisms containing lower pairs, but very lit- nates by way of which they developed closed-form dis-
tle has been done in analyzing spatial mechanisms placement relationships for all 3R-2C type spatialwith higher pairs. mechanisms. Duffy [14] has demonstrated the use of
spherical trigonometry and dual numbers to obtain
Kinematic analysis of space mechanisms was ini- closed form input-output relation for four-, five-,- tiated by the significant contribution of Dimentberg and six-link spatial mechanisms. Duffy and Crane. [1. Dimentberg (2,3] demonstrated the use of dual- (15] also use the same method for the displacement
mumbers and screw calculus to obtain closed-form die- analysis of a general spatial 7-link, 7R mechanism.placement relationships of an RCCCI and other four-,
five-, six-, and seven-link spatial mechanisms con- Iterative techniques for analysis of spatial
% taining revolute, cylindric, prismatic and helical mechanisms were developed by Hartenberg and Denavit
pairs. Denavit [4] derived closed-form displace- [16]. Uicker [17] explored in further detail the
ammit relationships for an RCCC mechanism using dual matrix approach of Hartenberg and Denavit. Soni* Ruler angles. Yang 15] used dual quaternions to get and Harrisberger [18] used (3x3) matrices with dual
displacement relationships for an RCCC mechanism. elements for an iterative approach to analyze spatialWallace and Freudenstein [6] used a geometric con- mechanisms.figuration method to obtain displacement analysis ofa general RRERR
2 linkage, also called the Tracts cou- Finite screws were used by Kohli and Soni [19,201
pling. to conduct displacement analysis of single-loop andtwo-loop space mechanisms involving R,CP,H and S
KRevolute, C - cylindric pair pairs. Recently Kohli and Soni [21], and Kohli and
E- planar pair Singh [221 used the method of pair geometric con-
straints and successive screw displacements to con-
duct analysis of spatial mechanisms containing lower
and higher pair. Sandor, Kohli etc. [23] used the
above method to conduct displacement, velocity and
acceleration analysis of three link spatial mechanisms
containing sphere-plane and sphere-groove pairs.
In the present paper, finite screw displacement,

I
expressed in vector form, and pair geometry con- u it vector defining the direction of the thirdstraints, also expressed in vector form, are used to .3 iat axis in the initial position - cylinder pairderive the displacement equations for four-link spa- 3.tial mechanisms containing sphere-groove and spriere-in-slotted-cylinder pairs. Although, the analysis u unit vector for defining the direction of theof spatial mechanisms containing sphere-groove and fourth joint axis - grounded cylinder pair 4.sphere-in-slotted-cylinder pairs can be done bymodeling these higher pairs as SP3 and RRP3 , the P locates the first joint axis uprocedure is made unnecessarily complicated by intro- .1ducing these hypothetical joints. The use of finitescrews and pair geometry constraints avoids this. P3 locates the third joint axis u3 in its initial
position.
P4 locates the fourth joint axis u4 .
A unit vector along the direction of the groove- e bedded in the groove element.
b unit vector perpendicular to the axial centerlineof the groove defining the orientation of the slotin the initial position, embedded in the grooveele=ent.
0- unit vector along the direction of the groove4 embedded in the groove element.
b* unit vector, coincident with b in the initial
Pposition, embedded in the sphere element.
X c* unit vector initially coincident with c, embeddedin the sphere element.
AC unit vector embedded in the sphere element, ini-FIGURE 1. THE C-SG-C-C MECHANISM. tially coincident with A
R vector locating the sphere center in the initialposition.
Z_ R* vector locating a point on the groove axis, but3 initially coincident with R.
rotation of the groove element pivoted at thef 1 first C joint.
• 3 relative rotation of the sphere element pivoted at
3 the third C joint, with respect to link 3 (Fig. 2).
4 rotation of link 3 pivoted at the fourth C joint.
SS, scalar translation along u1 at joint 1.
4 33 relative scalar translation of link 2 with respectX to link 3 at joint 3.
S. scalar translation at joint 4.4
FIGURE 2. ImE C-Sc-f.- MECHANISMS. Sg relative scalar translation of the sphere elenent: g along the groove for Sg pair.
3. THE FOUR-LINK MECHANISMS AND ASSOCIATED VECTORS
T relative scalar translation of the sphere elementFigure 1 shows the C-Sg-C-C mechanism, figure 2 along the groove for Sc pair.
shows the C-Sc-C-C mechanism. Also shown In the fig-ures are the following vectors and scalar quantities.The vectors are denoted by wavy underscores.
u unit vector defining the direction of the firstjoint axis - grounded cylinder pair 1.
3S: spheric pair, P: Prismatic pair, R: Revolutepair.
2

|.m~.h E IIIIIII I - I l | I | IE IE| !,*|.,..! - ! -
Thh~r I (rorntinlued.)
r A .k c. . Io )A .1 (. 1 A IC
Z A Y,
W -. 11
.2 ~ 2 I ~ '
Oats .Ua UOi 2 at*s. of rotation. * VN2 a* th,e ..ion. S, andSS, he c S.,elati at the Jsts. P1 and F I-at. e-t of
22
_R o t. : -:, , ... i-, sn ., etit.. sl.i,! Uslo+ ('3. (-)[ . (f).0 () em -
-
e2
io In + dool )
2.z (ose--lX ... oe
* .e 00
..01.. *. -(1,
FIGURE t. VETOR OTATI O F) FINITE S(.. hIVE 2 2 2 C 0 2 sod . 2 at. fsEos of .d S
SIRE !IPLCEENS C13 = 3( -(2-2 "'Y a-d can
be expanded Ilk. q clog e ) and M)
obt .1 2edne 2-1: + LogE (" .c2 +
SC1 *1 (C'8 2 -1)szt (2w,
D - : - ,* (...1) Dx (e 2-1)V201 $1642(e, .01
I * e . l(e42-((-o- 2) l "(ft-C(.- 2 ))"S .+(b
a - 2.
U *i . (co. 2-)I(.n 2 )na2 .0 2 2A
21
•~~I it . (coa- 2-tl .(%- -Ue 11 +f 8Wte~o (U (l. Um S.Pgm~t h
.2Y -2 .1 .
02C .21 .1 .2
I - o.). -1
FIGURE 4i. VECTOR NOTATION FOR FINITE SUCCESSIVE
Scotw DISPLACEM4ENTS. ~
4. FINITE SCREW DISPIACEWETSin lbs . of a a or r joint. the translation or .otation reopectio.3
Fig. 3 and 4 show a rigid body E connected to ground notlo'.. ani uhe r41SSItleg .q.ti-. es be coo.4ldebl. simplifiedS.
by mans of one cylinder pair and by a chain con-tainling two cylinder pairs respectively. By givingsuccessive screw displaceimentsl and using a shorthandnotation, the displaced position of A and R areobtained as shown in Table 1.-
ld Otable •
he dsplap0d positin t ofenettar A oeasch to bedy r I 0 f e 3
Is slmby-
(ese 1")( -A)- + *O- ' (V -) ":'(a)
. - . . . .
pee.a pot"1 it as tas vct A. OAe displaced positiont is ivent by
P isa v ector which locates Oto of rotation ol. and I-P cotains the
i1* "Muaetema. which ema be srtttre in te"M of coeatt tislt aftl*0aw .ffhsts.
It. "ts aed "felols of A "a53 1 1. is ent f it 4 (after *tewAd~istest !71011* & and 2) Sie salmed as toile"..
n (e I a" (c) RA).21 2.1Cc - 1
14?IRF TO% S. PHERE-GR03VE 66) PAIR.
2,(am*-)v 4, eas (a.3K 2 .2 *IYga~

41
The constraint equations for velocity and accelerationcan be obtained by taking time derivatives of equa-tions (1), (2), and (3). The general constraint equa-tions for Sg pair can be written as:
d d43 d n 1dtn _j R -t(SgA J), n 0,1,2 (4)
and for the Sc pair
dn 1 43 d n 1,2-OR% Rj) - J), n T 0,1,2 ()
dn 11 43Snt( ).-b. = 0,1,2 (6)d t _j AJ _J
Iuu.t 6. IKE SPhki-I',-SLora~CYLINDER (Sc) PAIR. 6. .XALYSIS OF MECHANISMS CONTAINING Sg PAIR
To analyze four link mechanisms containing an Sgpair, we need to consider equation (1). The termscan be expanded as in equations (h), (i) and (J) by
S. PAIR GEOMETRY CONSTRAINTS FOR THE Sg AND Sc PAIRS using proper subscripts and superscripts. In orderto get an input-output relation between e1 and 4 or
Figure 5 shows the sphere-groove (Sg) pair. The S4 (if the fourth joint is prismatic) it is necessaryvector A defines the axial centerline of the groove to ei~inate or S3 (depending whether the thirdand vector R locates the sphere-center. Figure 6
shows the sphere-im-slotted-cylinder (Sc) pair. joint is a revolute or prismatic) and S . The SgVector c defines the axial centerline of the groove pair has four degrees of freedom, so the other jointsO vector b is normal to c in the initial position. have to be either P or R joints.Vectors A, S, and c are all unit vectors. Vector Rlocates the sphere center. Vectors c*, b* are also 6a. The R-Sg-R-R Caseshown. In this case 81 is the input, 04 is the output.
The pair geometry constraints for the sphere- All the cylinder joints have to be forced to havegroove and Sphere-in-slotted-cylinder pairs can now zero translation to make them revolute joints. There-be defined. fore we have the following expressions:
The pair geometry constraint for the St pair is R I R + (cos)I-1)1(ul (R-PI))-u1 1 + sineI(ulX(R-P1))given by (see Fig 1) S. ...
1 43 (7)R - -S A1
(1) 1
where R is the displaced Position of R obtained from 43 4 4443 - Rj3 R - + (cose -l)C 3 + sin( (9)a screw displacement at joint 1; R 3 is' the displaced R_ +J c +3 (9)
position vector of the sphere centir originally loca- 4 4 4ted by R due to successive screw displacements at R" C 3J and D3j can be expanded like equation
joint 3 and 4; and A is the displaced vector A due to (j) with proper change of subscripts and superscripts.a screw displacementJat joint 1. Taking the cross product of equation (1) with AI we
The pair geometry constraint for the Sc pair is 1 1 _4 3 A1given by: !j Aj -j -j
R J R4 J - 1? (2) The left hand side is known since 80 Is the in-put. Expanding and then simplifying the right hand
Equation (1) and (2) imply that the relative side of equation (10) we have,displacement in the higher pair can only he along the 1 1 1 43 1 4 1 4groove. A J = A~ iR - Aj R1 + (cosA 3-1)(A 1'C31 ) + sin03
Also, there can be no rotation about the vector (A 'D31 ) (11)c. This condition can be expressed as
I 43 T.;,ing the cross product of both sides with(c 'b1)'b 4 0 (3) 1 e
-J_ j () A 1,D 'we haveI 1 -31 -
where, c . d b are the displaced vectors c and b 1 4 1 4 1 1 4 1 4due to A- 4 (Cos- 1(A1 C 3 )(A D ( .(R )-(.tD)(2
duo to a screw displacement at Joint 1. and-b 43 is 3 A .. -3 -] .'3the displaced vector h* due to succeqsive qcrw dis-placeMents at Joints and 4. Si?*ltifving and noting that equation (12) is actually
a scalar equation as both vectors are along Al, we
4
2. - .. .-, . - .. . " -., ' . " - , . , _ . ., ...., .. . . -

have, 2 3 2,x 4i -2. ) + x I(- 3 2-) + x4(4)1 -2 +2a
1 C 4 4 1 1 4 4 ( 4 3 5 4 2 4(Cos3- 1) [A (C (.D .)I ,.-(R .R.)'D. (13)+33J j A _j _3 + )- 6 0 (20)
•similarily taking cross product with A xC 4 and si--plifying we have _j .3j where , 1,2,3,4,5 ar defined in Table III.
4, 41" 4sin- [A -(D .C.) (14)A'-
3 .*.:j .3 j-J).C]
Equations (13) and (14) can be written as
A cos93 -B + A (15)
-A sinS3 = C (16) -•,
1 4 4 1 1 4 4 f:5:1" ' ---,SZ: 'S d ""i"lwhere A- A .(C 3 B A -(R -R )xD .
1.. 1
-j'~3j .3j. j .j j -3j (7 % ' )- I. D3 P43]1 1 4 (17) 1-A
C ,, A (R -R )-C- _j 3 '4 (A) .4 ~ ")'u P4((u4-3 4
j j j -j ._. _ (A.'R -A 1' 4,(K D
3 . P4x('j-' D3)l
Squaring and adding we have the input-output rela- - -j -. j - -3
tionship as, EQ'C3 -4 j- -. -4,. c
2C 2 C, " - 1% , )) (A . iRll " .. -.
B 2 + 2A,3 + .. (180 -3 . , i
Simplifying expressions in (17) it can be shown that . I.( 3 -(c 2 j. - -
all terns A, B and C are linear in sinS4 and cosS4 1. 4. iA. (u 1.C3.D))- .. ) .
(Table II) r*!, (u4 (C3 ?3))W
2.bl". .[xEA(u4 (C,'D3 ))I ] A
K. 1 -x3 2W.3
C€1 1 (t ) . MC -.((a . l(!.'9)., Again using cosA3 - 3 sn31 2 3
41 i-!2x~l4l - ll e.Al. i2,4 -CO.,2 ,4-2 + 1l 1+X32 i i+x 3
*~iI " CC3-) * (c.o 4 -)-...I-(C3 .- (C4 3 CC$ 3 )1 + miIne4 -(C 3 .D3 ).. 42 83x - tan-
(S3 4 3 3.4 . -3 Cnoe.44.fl.CC3U? )".4 I (c -D3) 3 2
sI.iJ. ! j - )* (.31--)4(-.3k 4 4~),u! and us!1g trigonometric identities:+ j .4 (b)...
-:.4 .... .. • sin=3x3 + cos 3 3 1, (21)
swl,-8,. - * .Ch 6 (d) sin 3 - x3 cos 3 - x 3 (22)
- a . , ) - •P W.- - we have. x3 - B/C = C/B + 2A (23)
4 using equazion (1) and rak-ng the scalar product withT - (coes -1l,31b!.' st)4 1* Y ) (a)-. (.'', () AI we ret,
1 1 '-3- 1 1 1U - V: 5 ('i )-A. /A1 -A1 (24)
. , (,), ) ( S :J -j -.1 -J -.1
So the input-output relation is of fourth degree in Taki:g the derivatives .,f equation (20), (23) and
the tangent of the output half-angle. The input- (24) we ca, obtain expresin., for velocities and
output relationship Is of the form, accelera:.-is.4
o ~ 2s 2l (COS4-1) 4 n 4+ 2 3 sin-4 (cos64-1) + 6b. 7!he R-Sg-R-P, R-Sz-?-i< and ',-Sg-?-P Cases.(19) For =echanisms containi,.. SP pair, like the
a4(cos 4-1) + a5sin-4 + 36 " 0 R-Sg-R-? -echanism. the R-Sg-P-R ,nochanism And theR-Sg-?-? mechanism, the input-outpit relationships can
2 2x be foun6 after simplif':in the expressions for finite
-using cosi a 4 ,sn - tan 2 screw displacements and the pair geometry constraints
4 14t 4 2 4 2 (see reference (241 for details).l+zx_________
'See also Ref. 1241.we get,
5
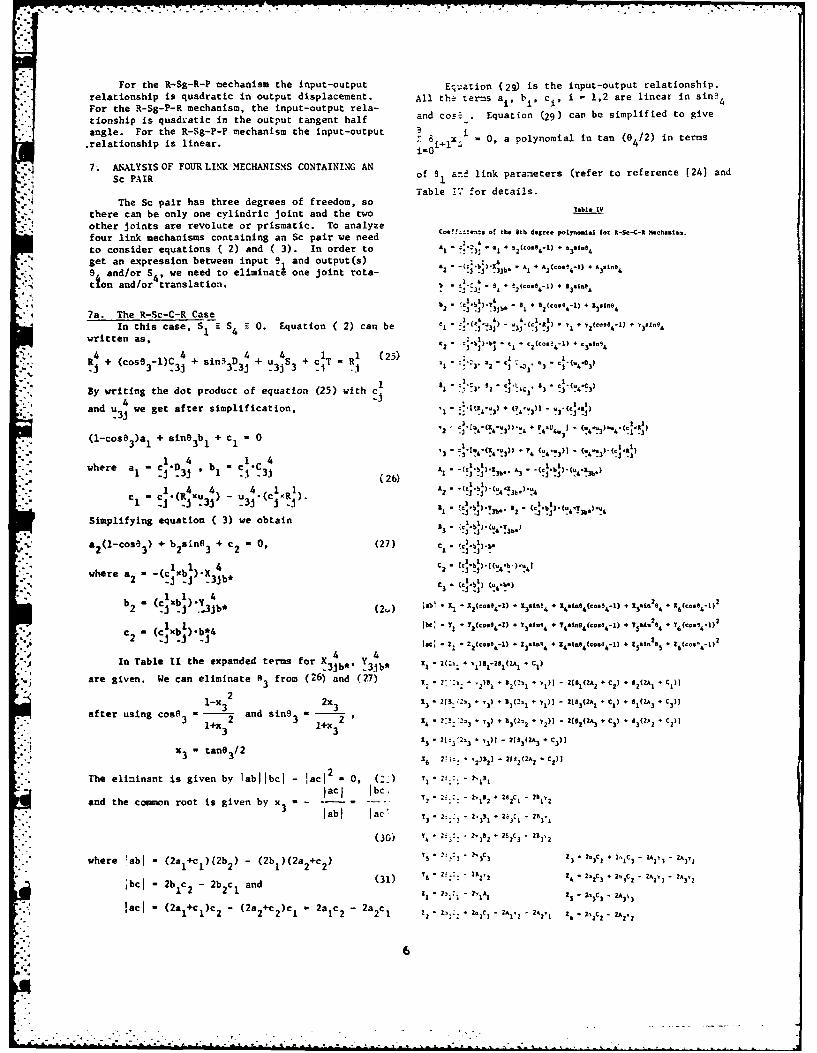
For the R-Sg-R-P mechanism the input-output Equation (29) is the input-output relationship.
relationship is quadratic in output displacement. All the terms al bi , ci , i = 1,2 are linear in sin
For the R-Sg-P-R mechanism, the input-output rela- i
tionship is quadratic in the output tangent half and co-,. Equation (29) can be simplified to give
angle. For the R-Sg-P-P mechanism the input-output I
relationship is linear. 6i x A - 0, a polynomial in tan (04/2) in terms
7. ANALYSIS OF FOUR LINK MECHANISMS CONTAINING AN
Sc PAIR of 81 a6 d link parameters (refer to reference 24] andTable I7 for details.
The Sc pair has three degrees of freedom, so
" there can be only one cylindric joint and the two T.b. IV
other joints are revolute or prismatic. To analyze
four link mechanisms containing an Sc pair we need 41 o
to consider equations ( 2) and ( 3). In order to h" *"z + 2 (Coos 4 ) V
get an expression between input 9 and output(s) - . ± +2(x4
-'":ndlor S4 0 we need to eliminate one joint rota- - j "3jb* 1 ,-) + e.4
tion and/or translation. :" ' " 2 - + Yiab -"
1 SI 4 3 4
'. '.J'.T)Jb* ~* 1 31(co.4
4-1) 4 530084
" 7a. The R-Sc-C-R Case j A
In this case, S1 = S -0 . Equation ( 2) can be c .*1 A)
- . " + c -1) 4-- .3 -1_ I * " c(~ ' (c041) +
Yln%written as, - ,.'b ).bj3 - 2
4 1 1 ( 3 -, 3 1 c2 ( o 4 - ) + e e 3 1 4
(Coss3-1)C3 + sin. 3 " + u +c1T" S- 1 (2 3, 03 - C (1.V03)
3j 3 -i 3 31 a%
By writing the dot product of equation (25) with c *".. 9 c j -4C " 3 83 - 3
4 wI_and u3j we get after simplification, -4 -. o) * (?g)1 - .3-(C'.j)• 1 *( , 3- (o'.3..o-(c"I)
(l-coso 3 )a + ain 3b + c - 0 "* 4 4. .4
13 . ('..!4 . u. )) + r4 (u - )1 - (m.. . (c.a- )1 4 1 4_ 4. 4.
where a c D bI c .C A,* -(- 3,bo. 3 I
I j 3j 1 - 3j (26) --(' " "
)6"I -. .
I 1
1.
4. 1 l :--(€ . I... .
c (R xu u a u (cJ " ) ! j ' 3bz - 4.j j i _ j -3 3j j _j - .r)-T, .IZ (,.bl).(., -T ).
Simplifying equation ( 3) we obtain 11 I-3 - 4 .6 .b"
a 2 (1-cos8 3 ) + balnA 3 + c 2 0, (27) c1 " '
""" "1. 4 c c .b€, ).[(. -b.).u I
where a2 - -(c b X3 jb - .
1 4I! ~ ~b " (CI xb I)-Yj " 4 laJ' .. 2) ]b, . .Z=sZ X st skzn6,4(€°04-l) +xsme 20 16cskzZ 21 Zc~sZ )ie,+Vzncsl
- j j !.3jb" (.) " 2 (-89t71) - Yi( - + X4. It2
8• +
16 (c0*8 4 -1)
C - (.C j o*"b*4 'b' 4- 1I
* 11o 00 4-1) * y3ean94 + T42,no4(coef4-1) 4 5'1
1M0 4
+ T 61(coSS4-1)2
2 -a- - J4 4 Ise; 2* . a 3 (Coc-) -* ±331094 + Z4"104 Cosa84l) + ± X .2e8, .Z 2
Im Table II the expanded terms for X3jb* Y3jb* 11 "(_ 0 ,1 )51 281 (2A + c)
are given. We can eliminate A3 from (26) and (27) x* Q ' 5.(- 1 +) - 2!eI(242 + C,) *±'( + C')+
.- x 32
2x 3 X3 215::Z,) * 3) + a(2 1 + ")) - 2183(2, + C1) , + ca)(
after using cosA3 =- and sin9 - -*
3 .- 2 3 2 1 - :b ) + a(2, - 210 (2A + a (2'.
1 - 2['.-o 3 j , ) - 2[31(2A 3 3C]
x - tanO3 / 3 3 21(: - C1?(ZA C2 ))
2The elininant is given by 1abj Ibci - lacl l 0, (x) " -
lacl Ibc lot
and the common root is given by x 3 - 2= 1 -- - 28"2 21 1
I abf ac~ 13 -2-.: 3 -21,~ 2 3
where !abl - (2a+c )(2b 2 ) - (2bM)(2a +c2 ) It" 5 " c) 13 - 2.3 C, 4 tIC - ±1Y3 - 2,)
"bcj - 2blC - 2b c and (31) 6 . ::: 2- 2 4 - 2 , + " ,,3C2 - 2 3 2A3
1b c 2 c 2 2 1 2 1 * 2 1:1 - Al 2~ - 2 C3 - 2 3 ')
tact - (2a 1 +C)c 2 - (2a 2 +c 2 )c2 - 2aI c 2 - 2a2 c I -±2 - 2'cI -1
' 2 -2Aj 1 z . 2 2 C2 - A,
, . |

Table IV rpnntinued) lat-c. The expr --:-. f~r inter-ediate joint angles4, ! {- I I- o ' be f.und b ; :ak. ,jitable dot and cross pro-8 o * * 04 + 66(tos94 -1) 5 n.st a manner s.. to the R-Sc-C-R case.
. 4 * 0- 9.-1)' + !7*10i4 (,ose 4 -1)2 + 8g(CCos8-1)s420' 4. .."ICAL rx '--
* * 4 6 d'O(CoS9i-). , 2 (tn (o.24
0-1)
1 9I K4(Oe. 4 -1)3
4 + 1 5 ( O4 1) - + 3i - ;R -= 1 + 4 lk
6 1 1 2%1 -Z12
37 "; +0^
~+. 24j - ;4- +* t3 T - 2Zz13 u + 0.38i - O.5k;A = 0.7071+ 0.7071 + Ok
44 . Jl( 4 * X47 )
- 2zZ" + -13Y2 - 2Z 3
'C X' 22, + 2 av - is the input. '.-knovns are 3' 4' and Sg.S 1 57" - 1 Y)3 -The p-c:s of te a:d in terns of are shown in86 "X|6
+ X61 1 - 2Z 1ZS + XZY2 - Z2 .1f g--:.e 7 and 8. 4 3 1
07 X +Y + V63 - 'I - 2"224
dtO . X Y6 + X Y - 2z2Z ,.2,
3Y - 4 A X+ 2 - 222 5 - 3 Z4 I /69 . I 1V$+1S3 -22 3z 5
412 * "S'4 * 134 2Z4Z
6 13 ' I479 * 44 - 226xI, - ST - $-
.Siwg *094 -6 (e= -1) - - -o =/( 1 4 =lz
t
.*n Cos% 4 2 4 *1LX 34 ** =
11t-41 Sch degr*& p.l1y-i.1 to4. ant1.8
1 s ( L 26 , + s56
4 - ) + a 7 (2 8 6 - 4 64 + 8a d 16 6 6) + j. 4 e .! A4~~4 (1
'+01 0 4 31
(441 - 642 46 + 81- 8 5M
1+ 16 6 8411) + x4S(684 - 84 +6 1 1a 89 1 ?83)
U6 z4(64 1 " 632 +# I6 + 446 as, + 16 1
) + R43(23.14+
) *a* 14 (4 3 - 441 4 + "I) +.34 2
(44a" 262 + " 5) + R,(283) 1
Equation (30) gives 03* To get S3 and T we
again take suitable dot and cross products:
[( -R4 ) - (cose3-I)c I • 0 SPS3 4 1
3 (D xc I )
1 4 4 44 -. .[(R-R ) (csO -)C 1(D u) (.( (3 - J 3 J ,-- 3.
2. (-S:-C-R Mechanism:7b. The R-Sc-C-P. R-Sc-R-C and R-Sc-P-C Cases. a.--en
For the R-Sc-C-P, R-Sc-R-C and R-Sc-PIC mecha- - +0J +0" ; P3 1 +2j +Oknisma, the input-output relationship and the expres-. 3sions for the intermediate joint variables can be P, " 2. +3j +%k ; R - Ii +lJ +1kfound after simplifying the expression for finite 0! +0.707J-0707V; 0.5771+0.577J+0.577kscrev displacement and the pair geometry constraints . : - 3 5(see reference [24] f~r details). -. 7071+0.707J+-Ck ; b - li +oj +Ok
For the R-Sc-C-P mechanism the Input-output rela- 01 +0J +1k ;b* - li +OJ *0k
tionship 16 quadratic. For the R-Sc-R-C mechanism and is the input. -he unknowns are 03' 04 S4the input-output equation is an eighth degrc!, poly- and . The plot of , in termnomial in the output tangent half-anele. For the R- aigure 9, s of 6 Is given in
Sc-P-C case, the input-output relationship is quad-
:.." ..' . +.'. -.. .-.. + . ..

8. C Zce, M.A., "Solutions to the Vector Tetrahe-dron Equa:ion", Journal of Engineering for Industry,Tr-ns. ASME, Series B, Vol. 91, No. I (February, 1969),pp. 178-234.
9. Yang, A.T., "Displa:enent Analysis of SpatialFive-'ink Mechanisms Using (3x3) Matrices with Dual
r rber Elements", Journal of Engineering for Industry,I Trans. ASME, Series B, Vol. 91, No. 1 (February 1969),
p p . " s2-o7 .l0. Soni, A.H., and P.R. Pamidi, "Closed Form Dis-
Dlacenent Relationships for a Five-Link R-R-C-C-R Spa-t:a- Yechanisms", Journal cf Engineering for Industry,Trans. ASME, Series B, Vol. 93, No. I (February, 1971),pp. 221-226.
11. Soni, A.H., R.V. Dukipati, M. Huang, "Closed-for= Displacement Relationships of Single and Multi-
-- .. .loc7 Six-.ink Spatial Mechanisms", Journal of Engineer-irr f-or Industry, Trans. ASME, Series B, Vol. 95,(Agust, 1973). pp. 709-715.
12. Yuan, M.S.C., "Displacemnt Analysis of the" . ". " - - R-RCCR Five-Link Spatial Mechanism", Journal of Applied
9. Cz:C2lSION Mechanics, Trans. ASME, Series E, Vol. 37, (September,--I75p). p. 689-696.
Displacement equa:iors have been derived for sev- 13. DuLffy, J. and H.Y. Eabib-Olahl. "A Displacementeral four-link spatial =echanisms containing sphere- Anal.;sis of Spatial Five-Link 3R-2C Mechanisms", J. ofgrcove and sphere-slo::ed-cylinder pairs. Velocity Mechanisna,_Part 1, 6, (1971), pp. 119-134; Part 2, 6,
% and acceleration relationships can be obtained by dif- (1971), ri. 463-473; Part 3,7, (1972), pp. 71-84.ferentiating the displarezen: equations. The grooves l&. Duffy, J., Analysis of Mechanisms and Robotof these pairs were ass-ed to have straight axial Mani-latars, Halsted Press, 1980.cen:erlines. Rv-ever, a =ore generalized groove may 15. Duffy, J. and C. Crane, "A Displacement Analysisbe one +ere the center:1ne is a spatial curve. The of S:arial 7-Link, 7R Mechanisms", Journal of Mecha-authors are working on :he analysis of these and also nisns, 1990, pp. 153-169.of other three, four, fi-e and six link mechaniszs H6. Rartenberg, R.S., and J. Denavit, Kinematiccontaining other hiahe: nairs. The expected result S-t:hesis of Linkages, New York: McGraw-Hill, 1964.
'.' of :he work will be re.rteC in forthcomin2 paners. 17. Uicker, J.J., J. Denavit and R. Hartenberg,"An Iterative Method for the Displacement Analysis of
'CK"' ENT Spatial M!echanisms", Journal of Applied Mechanics,Trans. ASME, Series E, Vol. 31, No. 2 (June 1964), pp.
thi .e authors wish to acknowledge the support of 309-314.
this research at the *niversity of Florida by the U.S. o 3. Soni, A.H. and Lee Harrisberger, "ApplicationAry: Research Office under Grant No. DAAG29-K-0O25. of (3x3) Screw Matrix to Kinematic and Dynamic Analysis
of Mechanism", VDI-Berichte, 1968.10. R:-EERECES 19. Kchli, D. and Soni, A.H., "Displacement Analysis
of Single-Loop Spatial Mechanisms", ProceedIngs ofI.-e_2,International Symposium on Linkages, Bucharest,
1. Dimentberg, F.M., "A General Method for theInvestigation of Finite Displacements of Spatial R-ania, June 6-13, 1973.
Mechanisna and Certain Cases of Passive Joints ",:kkd. 20. KWill, D., and A.H. Soni, "Displacement AnalysisNauk. SSR Trudil Sen. :eorriMash. He. ,, No. 17, of Satial Two-Loop Mechanisms", Proceedings of IFToMtM,1943, pp. 5-39. International Symposium on Linkages, Bucharest, Romania,
2. Dimenzberg, F.M., "The Determination of the June 6-13, 1973.Positions of Scatial Mechanisms", (Russian), Akad. . Kchli, D. and Sonl, A.H., "Kinematic AnalysisNa...., Mcscow, 1950. o 7tial Mechanism Via Successive Screw Displace-
3. Dimenzberg, F.M., The Screw Calculus and Its ments", :ournal of Engineering for Industry, Trans.Application in Mechanics, Izatel'stvo 'Nauka", ASME, Series B., No. 2, Vcl. 97, (May, 1975), pp. 739-Glaiaya Redakstya Ffzko-atematicheskoy Lteratury 747.
d yL Sfngh, Y.P. and Kohli, D., "Kinematic AnalysisMoscow, 1965. -"and Displacement of Snatial Mechanisms Containing Lower and Higher
4. Denavnt, ., Base on and DslMatces ar ,roceedins of the 6th OSU Conference ofAna"vsis of Mechanisn 3sed on (-) Dual Matrices", A- Mechanisms, October 1-3, 1979. pp. 35-1 to(Ph.D. Dissertation, !;:r:h western University, 1956).
5. Yang, A.T., "An:lication of Quaternion Alge-bra an- -jal [.ushers -o the Analysis of Spatial 'fecha- 23. Sander, C.N., Kohl , r., Hernandez, M. Jr., and
niszs", (?h.D. Disser:a:don, Columbia University, New C.sa. , A. 'Kinematic Anai:sis of Three-Link Spatial
York, N-Y, 1963, Universi:y Microfilm, Library of Con- . Containing Sp'ere-Plane and Sphere-Groove" gress Eard No. Mic 6;-U33, Ann Arbor, Michigan). ~Pirs, ?roceedings of the 7th OSV Conference of
6. ;;alla:e, D.M., and F. Freudenstein, "The Dis- A:,1!ed YechanisQ, Dece:her 7-9. 1981, pp. 32-1 to
place=ent Anal:ysis of the 7eneralized Tracta Couling", 32-!:.
Journal of Applied Yezhanics, Trans. ASME, Series 3, " A.,"Analvs!s of Spatial Mechanisms
Vol. 37 (Septenber, li;M), pp. 713-719. r.-n:ainin2 Hixher Pairs", Taster's Thesis (May 1982)
7. Chace, Linkages", De7)rtnent of 'lechanical Engineerlng, University ofi CacM.A., "'-ec:or Analysis of Likgs, Fl.'rida.Jou nal of Engineerin; fr Industry, Trans. ASME,
Series 3, Vol. 84, Nc. 2 (May, 1963), pp. 289-296.N-
°..
" ' '" "3"" "' " ' "' ''"L " '''' L .. . - . : • - .. . .. .

.I i
ANALYSIS OF SPATIAL ;XECHANISMSCONTAINING HIGHER PAIRS
"BY
ASHITAVA GHOSAL
A THESIS PRESENTED TO THE GRADUATE COUNCILOF THE UNIVERSITY OF FLORIDA IN
PARTIAL FULFILLMENT OF TH!E REQUIREMENTSFOR THE DEGREE OF. MASTER OF SCIENCE
UNIVERSITY OF FLORIDA
1982
4. - -4- ---- - , . . - -
ACKNOWLEDGMENTS
I am indebted to my father and mother for their encouragement
and support which helped me pursue my graduate studies.
I wish to express my deep appreciation to the chairman of
my supervisory committee, Professor George N. Sandor for his
guidance, encouragement and support. His research insight has
been invaluable for developing and guiding my interest in the
field of spatial kinematics.
I extend my gratitude to Dr. J. Duffy and Dr. R. G. Selfridge
for their participation on my conmittee. I also extend my deep
gratitude to Dr. Dilip Kohli for his invaluable help and for sug-
*i gesting this topic for research.
Very special thanks are extended to Mr. Charles F. Relnholtz,
Mr. Manuel V. Hernandez, Jr., and Mr. Xirong Zhuang for useful dis-
cussions and Invaluable help. Thanks are also extended to my room-
mates, Vickram and Pravin, for all their help.
Acknowledgments are also due to the Mechanical Engineering'.
Department for financial support. This research was supported by
ARO grant number DAAG29-K-0125.
I also wish to thank Carol Laine and Sophia Kohli for their
excellent typing.
4.i
TABLE OF CONTENTS
PAGE
ACKNOWLEDG4ENTS ............... *......................... iii
LIST OF FIGURES ............................................... vii
ABSTRACT ................... ................. . ..... ix
CHAPTER
I INTRODUCTION .................... ........ ,......... 1
2 FINITE SCREW DISPLACEMENTS ................ ..... 6
2.1 Introducti on ............. . .......... ...... 62.2 Finite Screw Displacement ..................... 8
2.3-1 Finite successive screw dis-placement .............................. 10
2.3-2 Alternate form of relations insection 2.3-1 ............. ....... 14
2.4 Expressions for Derivatives of A and Rj.. ...o. 18
3 PAIR GEOMETRY CONSTRAINTS ................... ... 23
3 .1 Introduction ... .. . .. . . .. .............. 23
3.2 Sphere-Plane Pair (Sp) .... ....... 233.3 Sphere-Groove Pair (Sg) ....................... 253.4 Sphere-Slotted-Cylinder Pair (Sc) ............. 273.5 Cylinder-Plane Pair (Cp) .................... 28
4. ANALYSIS OF THREE-LINK MECHANISMS ................... 30
4.1 Introduction ....................... ; ........ 304.2 Type of Three-Link Mechanisms ................ 314.3 The Three-Link Mechanism and Associated
Vectors .......................... 314.4 Analysis of p,-Sp-pl Type Mechanisms ...... 35
4.4-1 R-Sp-R case .................... . . . ..... 354.4-2 R-Sp-P case ..... .................. 384.4-3 P-Sp-P case .......... .................. 38
4.5 Analysis of p1-Sg-p2 Type Mechanisms .......... 394.5-1 R-Sg-C case ........................... 394.5-2 P-Sg-C case ........................... 42
iv

CHAPTER PAGE
4.6 Analysis of P1-Cp-p 2 Type Mechanisms ............ 43
5 ANALYSIS OF FOUR-LINK MECHANISMS ................ 47
* 5.1 Introduction................................... 475.2 Types of Four-Link Mechanisms .................. 485.3 The Four-Link Mechanisms and Associated Vectors ... 485.4 Analysis of pl-Sg-pl-pl and pj-Sg.-pj
Types of Mechanisms ......................... . 565.4-1 The R-Sg-R-R case ....................... 565.4-2 The R-Sg-R-P case ......................... 605.4-3 The R-Sg-P-P case ............................ 625.4-4 Analysis of pl-pl-Sg-pi type of
mechanisms .......... ....................... 635.5 Analysis of Mechanisms Containing Sc Pair ......... 65
5.5-1 The R-Sc-C-R case .......................... 655.5-2 The R-Sc-C-P case ..................... 715.5-3 The R-Sc-R-C case ....................... 735.5-4 The R-Sc-P-C case ......................... 745.5-5 The p -pz-Sc-Pl and pl-pl-Sc-p, cases ...... 75
5.6 Analysis of Aechanisms Containing Cp Pair ......... 765.6-1 The R-Cp-R-R mechanism .................... 775.6-2 The R-Cp-R-P case .......................... 805.6-3 The R-Cp-P-R case .. ................ 815.6-4 The R-Cp-P-P case ........ ........... 825.6-5 The pl-pl-Cp-pl cases .................. 82
6 ANALYSIS OF FIVE-LINK MECHANISMS ....................... 84
6.1 Introduction ..................................... 846.2 The Five-Link Mechanisms and Associated Vectors ... 846.3 Analysis of R-R-Sc-R-R Mechanism .................. 896.4 Analysis of R-R-Sc-P-R Mechanism .............. 976.5 Analysis of R-P-Sc-P-R Mechanism................ 996.6 Outline of Analysis of Other Five-Link
Mechanisms ....................................... 100
7 NUMERICAL RESULTS ...................................... 102
8 CONCLUSION AND RECOMMENDATION .......................... 128
APPENDICES
I DETAILED EXPRESSIONS FOR ANALYSIS OF R-Sp-R,R-Sg-C AND R-Cp-C MECHANISMS ......................... 131
II SIMPLIFICATION OF SOME OF THE VECTOREXPRESSIONS ............................................ 136
v

APPENDICES PAGE,',,
III DETAILED EXPRESSIONS FOR R-Sg-R-R, R-Sc-C-RAND R-Cp-R-R MECHANISMS ................................ 141
IV FIVE-LINK MECHANISM ................................... 154
1. Eliminant of Two Quartics and Expressionfor Common Root .................................... 154
2. Detailed Expressions for R-R-Sc-P-RMechanism .......................................... 156
V LISTING OF APL COMPUTER PROGRAMS ....................... 162
REFERENCES ".................. ................. .. ........... 187
BIOGRAPHICAL SKETCH ........................................... 190
."v.
Abstract of Thesis Presented to the Graduate Councilof the University of Florida in Partial Fulfillment of the
Requirements for the Degree of Master of Science
ANALYSIS OF SPATIAL MECHANISMS
CONTAINING HIGHER PAIRS
By
Ashitava Ghosal
August 1982
Chairman: George N. SandorMajor Department: Mechanical Engineering
In this work, results of the investigation dealing with analysis
of spatial mechanisms containing higher pairs are presented. Com-
plete analytical expressions for the position, velocity and accelera-
tion analysis for several three-, four-, and five-link spatial
mechanisms containing higher pairs are presented. Also presented
are computer programs for the analysis of some of these mechanisms.
A higher pair as distinct from a lower pair allows minre
degrees-of-freedom between its elements. The kinematic analysis
of spatial mechanisms containing higher pairs is based on the
concept of finite screws and pair geometry constraints. Expres-
sions for finite screws and their derivatives have been developed
and expressed in a shorthand notation. The pair geometry con-
straints for sphere-plane, sphere-groove, sphere-slotted-cylinder
Ax
;. ~ - -. -

and cylinder-plane higher pairs are presented. Using these pair
geometry constraints, and the finite screws and its derivatives,
several mechanisms containing the above mentioned higher pairs
have been analyzed for position, velocity and acceleration.
Computer programs are given for the analysis of some of the
typical three-, four-, and five-link mechanisms. The use of
the programs are demonstrated in the examples in Chapter VII.
hi man
A.X

(
OPTIMIZATION OFSPATIAL MECHANISMS
By
CHARLES FREDERICK REINHOLTZ
-t
I
A DISSERTATION PRESENTED TO THE GRADUATE SCHOOLOF THE UNIVERSITY OF FLORIDA IN
PARTIAL FULFILLMENT OF THE REQUIREMENTSFOR THE DEGREE OF DOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
1983
.1
r -• . . -- "--- -. __ _ _
ACKN OWFEDUM.EN TS
I wish to express my sincere appreciation to the
chairman of my supervisory coi--ittee, Dr. George N. Sandor,
for his guidance, encouragement and support throughout my
undergraduate and graduate studies. He has probably ful-
filled more of Rudyard Kipling's "ifs" than any other
person I have known. I hope I have become a little more
like him.
X gratefully acknowledge the advice and support
given by the members of my supervisory committee, Dr.
Joseph Duffy, Dr. Ralph Selfridge, Dr. Chen-Chi Hsu and
Dr. Gary Matthew.
Special thanks are extended to Dr. Robert Gaither,
Chairman of the Department of Mechanical Engineering,. for
* encouraging my graduate studies and for his strong contri-
bution toward my professional development.
Thanks are also due to the many fellow students and
associates who provided technical help and moral support.
In particular I thank Mr. Keith Soldner, Mr. Mark Thomas,
Mr. Xirong Zhuang, Mr. Manuel Eernandez and Mr. Ashitava
Ghosal.
The financial support of the Army Research Office
under grant DAAG29-K-0125 is gratefully acknowledged.
ii iii

* I am indebted to my father and mother for twenty-
nine years of unfailing love and support.
Finally, I extend my deepest appreciation to my wife,
Jeri, for the unselfish time she devoted to the typing of
this manuscript, and for the years of patience and
- 1 .encouragement she has provided.
a-iv

TABLE OF CONTENTS
ACKNOWLEDGEMENTS ... . . . . . . . . . . . . .iii
ABSTRACT. . . . . . . . . .. . . . . . viii
CHAPTER
1 BACKGROUND AND MOTIVATION FOR THIS* ~~RESEARCH. ........ . . . . . . . . * .1
1.1 Introduction ....... . ..... 11.2 The Elements of Mechanism
Optimization. . . o .41.3 History and Literature Review. . o . . . . 71.4 Conclusions of the Literature Review . . . 23
2 OPTIMIZATION THEORY o 26
2.1 Introduction to Optimization . ...... 26
2.2 Formal Definition of theOptimization Problem . . . . . 28
2.3 The Mechanism Optimization Problem . . o . 302.4 Solving the Mechanism Optimization
2.4.1 Constrained NonlinearOptimization. . ......... 38
2.4.2" Indirect Constrained NonlinearProgramming Techniques. . . . . . 40
2.4.3 Unconstrained NonlinearOptimization . ..... 50
2.4.4 Hooke and Jeeves' NonlinearProgramming Method ........ 53
3 PHILOSOPHY OF MECHANISM OPTIMIZ TION. . . . . . 58
3.1 The Need for a General Philosophy. . ,. • 583.2 Objectives and Constraints of
Mechanism Optimization. . . . ..... 603.3 Observations and Trends Affecting
Mechanism Optimization . . . . . . . . . 673.4 Development of a General Mechanism
Optimization Philosophy. . . . . . . 69
V
................*.. *. . - V-

4 PRECISION POSITION SYNTHESIS OF SPATIALMECHANISMS ...... .................. . 74
4.1 Introduction to Precision PositionSynthesis. ..... . .... .......... 74
4.2 Dyadic Synthesis of Mechanisms . . . 754.3 Position and Orientation of a Body
in Space . . ... 79
4.4 Synthesis of the Revolute-Spheric(RS) Dyad. . . . . . . . . . . . . 82
4.5 Synthesis of the Cylindric-Spheric(CS) Dyad. . . . . ._ _ . . . . 89
4.6 Synthesis of the Cylindric-Cylindric(CC) Dyad. . . . . . . . . . . . . . . o 96
4.7 Synthesis of the Revolute-Cylindric(RC) Dyad. . .. . . . . 108
4.8 Conclusions of Precision PositionSynthesis. . . . .108
5 OPTIMIZATION OF THE RCCC MECHANISM. . . . . . .111
5.1 Problem Definition . . . . . . . . . . . .1115.2 Satisfying Additional Motion
Requirements . ......... 1125.3 The Grashof Condition. ...... 1175.4 The Branch-Avoidance Condition o . . . .1215.5 The Order Condition. . . . . . o . . .1265.6 Fixed-Pivot and Link-Length Ratio
Conditions . . . . . . . . . . . . . . .1285.7 The Objective Function . . o . . . . . . 1295.8 Numerical Example. . . o . . . . . . . . 134
6 OPTIMIZATION OF THE RSSR-SC AND RSSR-SSMECHANISMS. . . . . . . . . . . . . . . . . 139
6.1 Problem Formulation. . . . o . . .139
6.2 Method of Design . . . . . . . . . . . 142
6.3 The Branch-Avoidance Condition . . . . . .1456.4 The Grashof Condition . . . . . . . . ...1506.5 The Transmission Characteristic
Condition. . . . . . . . . . . . . . . 1576.6 Fixed-Pivot and Link-Length Ratio
Conditions o . . . . . . . .1616.7 Satisfying Additional Motion
Requirements . . . o . . . . . . . . . .1626.8 The Order Condition. . . o o .163
6.9 The Objective Function . . . . . . . . . .164
6.10 Numerical Example. . . . . . . . . . . . 168
,(
vi

7 CONCLUSIONS AND RECOMMENDATIONS FOR FUTURERESEARCH ........ . . .............. .. 1 3
7.1 Conclusions ....................... 1737.2 Recommendations for Future Research. . .175
APPENDICES
1 RCCC MECHANISM OPTIMIZATION PROGRAMS. . .*. . .179
2 RSSR-SR MECHANISM OPTIMIZATION PROGRAMS .. 189
REFERENCES . . . . . . . .......... . .201
BIOGRAPHICAL SKETCH . . . ........ .213
vii
" " ;-'m" . - - -" - "" - " ----... ,_ . • e-....... ... . . . .
...
Abstract of Dissertation Presented to the GraduateSchool of the University of Florida in Partial Fulfillmentof the Requirements for the Degree of Doctor of Philosophy
OPTIMIZATION OF SPATIAL MECHANISMS
By
Charles Frederick Reinholtz
August, 1983
Chairman: George N. SandorCochairman: Joseph DuffyMajor Department: Mechanical Engineering
The material in this dissertation can be effectively
divided into two subtopics: philosophy of optimal mechanism
design, and optimization of dyad-based spatial mechanisms.
The first subtopic, philosophy of optimal mechanism
design, is intended to be general in nature, applying to all
types of mechanisms, both higher and lower pair, and both
planar and spatial. This is covered in Chapters One through
Three. Chapter One examines past approaches to mechanism
optimization. Chapter Two is a brief review of optimization
theory, particularly at it applies to mechanism optimization.
Chapter Three draws upon the insights gained in the first
two chapters to formulate a general approach to the mechanism
optimization problem.
The second subtopic of this dissertation, optimization
P (of dyad-based spatial mechanisms, is covered in Chapters
.ii

Four through Seven. This is actually a rather limited
. example of applying the philoscphy developed in the first
three chapters. Nevertheless, the mechanisins treated in
this section are believed to represent some of the most
useful motion generating spatial mechanisms, and, therefore,
those for which improved design theories are most urgently
needed. In Chapter Four, closed-form synthesis equations
are derived for dyads containic revolute (R), spheric (S)
and cylindric (C) pairs. Chapters Five and Six present
detailed examples of the optimization of the four-link
RCCC and five-link RSSR-SC and -SSR-SS mechanisms. Finally,
Chapter Seven outlines procedures for the optimization of
other dyad-based spatial mecha--sms, and offers suggestions
for further research.
Liix
.
(
-.............

'" *'24
KINEMATIC SYNTHESIS kND ANALYSIS; OFTHREE-LINK SPATIAL FUNCTION GENER.ATORS WITH HIGHER PAIRS
.",
BY
MANUEL VENAIJAS HERNANDEZ JR.
A DISSERTATION PRESENTED TO TEE7 GRADUATE COUNCIL OFTHE UNIVERSITY OF FLORIDA
.°4
IN PARTIAL FULFILLMENT OF T'E REQUIREMENTS FOR THEDEGREE OF DOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
* 1983
9;, k , . .-.... +-. . .

:.(
ACKNOWLEDGYtJ
My sincere gratitude goes to Dr. George i. Sandor, chairman of my
supervisory committee, for suggezting the topic and for his guidance,
supervision and encouragement in the preparation of this dissertation.
I am also grateful to the other fambers of the committee: Dr.
George Piotrowski, for his interest and valuable insights; Dr. Gary
Matthew, for his enthusiasm and assistance in the analytical problems;
Dr. Chen Chi Hsu, for his valuable com.ents and suggestions; and Dr.
Joseph Duffy for helpful discussions and for serving as an unofficial
committee member.
Special thanks are also extended to Dr. Dilip Kohli, of the Univer-
sity of Wisconsin, for all his help in the development of important
concepts in this dissertation.
To my colleagues, Ashitava Ghosal, Charles Reinholtz and Xhuang
Xirong, for the helpful suggestions ard cornts during numerous discus-
sions, to them I give my thanks.
I also extend my thanks to the College of Engineering, University of
the Philippines, and to UNESCO/UNDP through the Institute of International
Education for the financial support of my graduate studies.
Most of all, I am grateful to my wife, Marita, for providing the
inspiration and moral support, and for her patienceoduring this under-
" taking. And finally, to my parents, I give my thanks for the many
: ( ; unspoken encouragements and prayers.
' " iii
4
TABLE OF CONTENTS
ACKNOWLEDGMENT . . . . . . . . . . . . . . . . . . . . . . ii I
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . viii
LIST OF FIGURES . . . . . ix
ABSTRACT . . . . . . . .. *. . . .. . . . . . . . xii
CHAPTER
1 INTRODUCTION ....
1.1 Brief History . o o
1.2 Literature Survey . . .o. . . .. . ... 21.3 Objectives . . . . . . . . . . . . . . . . . . 71.4 Summary ... . . .. . . 7
2 REVIEW OF RELATED CONCEPTS ............. 9
2.1 Lower and Higher Pairs in SpatialMechanisms .......... . ... . ... 9
2.2 Background Mathematics on..-. 152.2.1 Solutions to Systems of Non-
Linear Equations . .o . . . .. . 152.2.2 Evaluation of Determinants . . ..... 18
3 THREE-LINK SPATIAL FUNCTION GENERATORS . .. .... 20
3.1 The Degree of Freedom Equation . . . . 203.2 Geometry of the Three-Link
Function Generators ....... 223.3 Parameters Available for Synthesis ...... 313.4 Pair Geometry Constraint Equations . . . . . . 34
3.4.1 The Sphere-Plane PairConstraint Equation . . . . . . . . . 34
3.4.2 The Cylinder-Plane PairConstraint Equation ........ . 36
3.4.3 The Sphere-Groove PairConstraint Equation . . . ....... 36
iv
al L1 J z ... . -- . ..

J, 9 9.
CHAPTER Page
3.5 Derivation of Vector Displacements 393.5.1 Vector Rotations........ 413.5.2 Screw Displacement of'a'Point in
Vector Form.. . . 413.6 R-Sp-R and R-Sp-P Equations of'Motion . . . 453.7 The R-Cp-C Equation of Motion ........... 473.8 The R-Sg-C Equation of Motion . _. ...... 483.9 Number of Positions Available for Synthesis 48
4 EQUATIONS FOR MSP SYNTHESIS . . . . . . . . . . . 51
4.1 Vector Expressions . ....... 514.2 The MSP Synthesis Equation for the
R-Sp-R Mechanism ....... 534.3 The MSP Synthesis Equation for'the
R-Sp-P Mechanism ....... 564.4 The MSP Synthesis Equation for'the
R-Cp-P Mechanism ............ . 574.5 The MSP Synthesis Equation for the
R-Sg-C Mechanism ............... 58
5 SOLUTIONS OF THE DIFFERENT SYNTHESIS CASES o . . . 60
5.1 Synthesis Cases for the R-Sp-R Mechanism . . . 615.2 Synthesis Cases for the R-Sp-P Mechanism . . . 615.3 Synthesis Cases for the R-Cp-C Mechanism . . . 635.4 Synthesis Cases for the. R-Sg-C Mechanism . . . 635.5 R-Sp-R Mechanism Synthesis Solutions ..... 63
5.5.1 Solutions for the Three-PositionSynthesis Cases . ... . 65
5.5.2 Solutions for the Four-PositionSynthesis Cases 66
5.5.3 Solution for the ive-PsitionSynthesis Case ...... 66
5.5.4 Solution -for the Six-Position*.Synthess Case ...... 68
5.6 R-Sp-P Mechanism Synthesis Solutions . 715.7 R-Cp-C Mechanism Synthesis Solutions . . . 71
5.7.1 Solutions for the Two-PositionSynthesis Cases . ..... -. . 72
5.7.2 Solutions for the Three-PositionSynthesis Cases ...... 74
5.8 R-Sg-C Mechanism Synthesis Solutions" . .... 755.8.1 Solutions for the Two-Position
Synthesis Cases ...... ..... 765.8.2 Solutions for the Three-Position
Synthesis Cases ............ 78
6 KINEMATIC ANALYSIS OF THE THREE-LINK FUNCTION) GENERATORS . . . 82
V
: . Y : .: :: ::; : ; : : : .:..-.-:.-.-..-.-... ...-.... .. . .... ..-. .
CF.APTER Page
6.1 Analysis of the R-Sp-R Mechanism ..... .. 836.2 Analysis of the R-Sp-P Mechanism ..... .. 856.3 Analysis of the R-Cp-C Mechanism ..... .. 856.4 Analysis of the R-Sg-C Mechanism ... ....... 876.5 Transmission Characteristics _. .... 89
6.5.1 Transmission and Deviation Angles . . 896.5.2 Applications to the Three-Link
Function Generators ..... . 936.6 Derivation of the Deviation Angle ;nd
Transmission Angle for the Three-LinkFunction Generators . . ........ . 936.6.1 Deviation Angle 6 for the R-Sp-R
and R-Sp-P Mechanisms . . . . . . 946.6.2 Deviation Angle for the R-Cp-C
Mechanism ..... 966.6.3 Transmission Angle for the R-Sg-C.
Mechanism ............ . 99
7 DESIGN OF THE PAIR ELEMENTS .1.... ....... 1017.1 Design of the Sphere-Plane Pair Elements 1 - 101
7.1.1 The Contour of the Plane in theSp Pair . . . . . . . . . . ..... 104
7.1.2 The Sphere-Rod and the Sphere Radius . . 1077.2 Design of the Cylinder-Plane Pair Elements . . 1137.3 Design of the Sphere-Groove Pair Elements . . . 116
8 NUMERICAL EXAMPLES .......... .. 123
8.1 Ftve-MSP Synthesis of a Revolute--Sphere-Plane--RevoluteMechanism . . . 123
8.2 Six-FSP Synthesis of a Revlt--Sphere-Plane--Revolute Mechanism ........... .. 131.
8.3 Three-FSP Synthesis of a Revolute--Cylinder-Plane--Cylinder Mechanism ........... 138
8.4 Three-FSP Synthesis of a Revolute--Sphere-Plane--Prismatic Mechanism .......... 140
8.5 Three-FSP Synthesis of a Revolute--Sphere-Groove--Cylinder Mechanism .......... 143
9 CONCLUSIONS AND RECOIIENDATIONS FOR FURTHER STUDY.. 148
APPENDICES
A EVALUATION OF THE ELIMINANT POLYNOMIAL FROMDETERM INANTS . .. .. .. .. .. .. .. .. . .. 150
B THE K COEFFICIENTS OF THE R-Sp-R SYNTHESIS
EQUATION FOR n =O, n =1-and n 2 ........ .... 153
vi
-, S -. ;-..: : - -... -. ... ...- ..-...... : -. -. -. -. - -. - - - .

APPENDICES Page
n MCn.; ( C THE Lij and M.. COEFFICIENTS OF THE R-Cp-C.13 13
SYNTHESIS EQUATION FOR n = 0. n = 1 and n = 2 . . . 157
D THE ELEMENTS OF [G ] [H],j and [P OF THE
-'R-Sg-C SYNTHESIS EQUATION....... . . . . . . 159
REFERENCES . . . . . .............. . . . . . . 163
BIOGRAPHICAL SKETCH ........................ 167
4
-5
, vii
Abstract of Dissertation Presented to the Graduate Councilof the University of Florida in Partial Fulfillment of the
Requirements for the Degree of Doctor of Philosophy
-2 KINEMATIC SYNTHESIS AND ANALYSIS.q• "!OF
THREE-LINK SPATIAL FUNCTION GENERATORS WITH HIGHER PAIRS
BY
Manuel Venadas Hernandez Jr.
AprIl 1983
Chairman: Dr. George N. SandorMajor Department: Mechanical Engineering
Function generation synthesis of spatial mechanisms with only three
links is achieved by employing higher pairs (sphere-plane (Sp), cylinder-
plane (Cp) and sphere-groove (Sg) pairs) to constrain the motion of two
links.
This dissertation shows the methods and procedures for obtaining the
equations for multiply-separated-precision point (MSP) synthesis for four
spatial function generators - R-Sp-R, R-Sp-P, R-Cp-C and R-Sg-C.
Higher pair constraint equations in vector form are utilized to
obtain closed-form solutions for the different synthesis cases of various
numbers of positions and specified and unknown parameters. The method
of elimination is used extensively to solve the resulting non-linear
* systems of equations.
xii
' - '- ' ., , , " . ' ., - ' . '. . ". . . . . , "- . . ". - ." " ., . . . .

Kinematic synthesis and analysis of the four spatial function
generators is performed in vector notations and with screw displacements
in vector form. Explicit eq',!'tions are also obtained from the investi-
gation of the transmission caracteristics of these mechanisms.
The synthesis procedures just completed were then augmented by
developing design criteria f:r the .pair elements -Lo assure ra.nge of
mobility and avoidance of interference.
(
,ii

-.- /
IT~t A FtL
1V1
pt All'4.
Aj ( fl 74. , '5W 4 t>w '~$'All'%
b-I-
-fK v
4 19j a> * $


















