5.pdf
10
1126 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 3, MAY 2008 A Fault Tolerant Doubly Fed Induction Generator Wind Turbine Using a Parallel Grid Side Rectifier and Series Grid Side Converter Patrick S. Flannery, Student Member, IEEE, and Giri Venkataramanan, Senior Member, IEEE Abstract—With steadily increasing wind turbine penetration, regulatory standards for grid interconnection have evolved to require that wind generation systems ride-through disturbances such as faults and support the grid during such events. Con- ventional modifications to the doubly fed induction generation (DFIG) architecture for providing ride-through result in compro- mised control of the turbine shaft and grid current during fault events. A DFIG architecture in which the grid side converter is connected in series as opposed to parallel with the grid connection has shown improved low voltage ride through but poor power processing capabilities. In this paper, a unified DFIG wind turbine architecture which employs a parallel grid side rectifier and series grid side converter is presented. The combination of these two converters enables unencumbered power processing and robust voltage disturbance ride through. A dynamic model and control structure for this architecture is developed. The operation of the system is illustrated using computer simulations. Index Terms—Doubly fed induction generator (DFIG), dynamic voltage restorer, voltage sag ride-through, wind turbine. I. INTRODUCTION A S the penetration of large scale wind turbines into electric power grids continues to increase, electric system opera- tors are placing greater demands on wind turbine power plants. One of the most challenging new interconnection demands for the doubly fed induction generator (DFIG) architecture is its ability to ride through a short-term low or zero voltage event at the point of common coupling (PCC), resulting from a fault on the grid. During extreme voltage sags high per unit currents and shaft torque pulsations occur unless mitigating measures are taken. Low voltage ride through requirements were first proposed by German electric transmission operators E.ON and VE-T in 2003 [1]. In the U.S. FERC order 661A stipulates that the wind turbine must remain connected to the grid and provide fault clearing current in the event that the voltage at the high side of the step up transformer to the transmission system drops to zero volts for a maximum of nine cycles, as the result of a three phase fault [2]. Similar low/zero voltage ride through requirements have evolved in most European countries, each with varying Manuscript received February 27, 2007; revised November 3, 2007. This work was supported by the Sponsors of the Wisconsin Electric Machines and Power Electronics Consortium (WEMPEC) at the University of Wisconsin- Madison and the Link Foundation Energy Fellowship. Recommended for pub- lication by Associate Editor Z. Chen. The authors are with the University of Wisconsin-Madison, Madison, WI 53706 USA (e-mail: patrick.fl[email protected]; [email protected]). Digital Object Identifier 10.1109/TPEL.2008.921179 specifications on minimum voltage level and requiring provi- sions of real or reactive power during fault events [3], [4]. While many grid codes also stipulate ride through of single and two phase faults, only balanced faults are considered in this paper. In a conventional DFIG wind turbine the machine stator windings are connected to the grid PCC via collection and/or transmission transformers and excited at the grid frequency. The rotor windings of the DFIG are connected to an ac–dc converter commonly referred to as the machine side converter (MSC). The ac side of a second dc–ac converter, commonly referred to as the grid side converter (GSC), is connected in parallel with the machine stator windings and PCC. Severe voltage sags and the resulting stator flux response place significant electrical stress on the MSC and mechanical stress on the gearbox. In the stationary frame the stator flux is equal to the integral of the stator voltage minus stator resistive drop. An abrupt stator voltage change produces a constant dc component of stator flux in proportion to the voltage drop [5]. This dc stator flux component appears as an oscillatory electromagnetic field (EMF) when translated into the synchronous and rotor reference frames [6]. Deep sags and correspondingly large EMF in the rotor reference frame cause the MSC to go into over-modulation, re- sulting in loss of rotor current regulation [7]. The uncontrolled rotor currents can exceed the semiconductor device ratings and result in damage the MSC. In addition, this commonly precipi- tates high transient stator currents and transient torque spikes [8]. Several options have been proposed to improve low voltage DFIG ride through. Two modification to the rotor circuit in- cluding the addition of either an silicon controlled rectifier (SCR) rotor crowbar circuit [8] or a three phase rectifier and modulated resistive load have demonstrated improvement in the DFIG ride-through capability [9], [10]. As an alternative, brief disconnection of the stator windings during a voltage sag via an SCR static switch [11] has also been shown to reduce torque and current spikes for sags to 15% of nominal. A modified rotor current control method has been shown to protect the MSC for wind tubine terminal voltage down to about 30% of nominal, with residual torque spikes and oscillations [7]. From an alternate perspective, the authors of [12] first pro- posed using an inverter connected to the Y point of the DFIG, in series with the stator windings, for the purposes of damping synchronous frame stator flux oscillations. The presence of the converter in series with the stator winding allows a direct handle with which to access the stator flux state variable. The use of a series connected grid side converter was first considered for the purposes of voltage sag ride briefly in [13], but it properties and 0885-8993/$25.00 © 2008 IEEE
-
Upload
maroju-santosh-kiran -
Category
Documents
-
view
213 -
download
1
Transcript of 5.pdf
-
1126 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 3, MAY 2008
A Fault Tolerant Doubly Fed Induction GeneratorWind Turbine Using a Parallel Grid SideRectifier and Series Grid Side Converter
Patrick S. Flannery, Student Member, IEEE, and Giri Venkataramanan, Senior Member, IEEE
AbstractWith steadily increasing wind turbine penetration,regulatory standards for grid interconnection have evolved torequire that wind generation systems ride-through disturbancessuch as faults and support the grid during such events. Con-ventional modifications to the doubly fed induction generation(DFIG) architecture for providing ride-through result in compro-mised control of the turbine shaft and grid current during faultevents. A DFIG architecture in which the grid side converter isconnected in series as opposed to parallel with the grid connectionhas shown improved low voltage ride through but poor powerprocessing capabilities. In this paper, a unified DFIG wind turbinearchitecture which employs a parallel grid side rectifier and seriesgrid side converter is presented. The combination of these twoconverters enables unencumbered power processing and robustvoltage disturbance ride through. A dynamic model and controlstructure for this architecture is developed. The operation of thesystem is illustrated using computer simulations.
Index TermsDoubly fed induction generator (DFIG), dynamicvoltage restorer, voltage sag ride-through, wind turbine.
I. INTRODUCTION
AS the penetration of large scale wind turbines into electricpower grids continues to increase, electric system opera-tors are placing greater demands on wind turbine power plants.One of the most challenging new interconnection demands forthe doubly fed induction generator (DFIG) architecture is itsability to ride through a short-term low or zero voltage eventat the point of common coupling (PCC), resulting from a faulton the grid. During extreme voltage sags high per unit currentsand shaft torque pulsations occur unless mitigating measures aretaken.
Low voltage ride through requirements were first proposedby German electric transmission operators E.ON and VE-T in2003 [1]. In the U.S. FERC order 661A stipulates that the windturbine must remain connected to the grid and provide faultclearing current in the event that the voltage at the high side ofthe step up transformer to the transmission system drops to zerovolts for a maximum of nine cycles, as the result of a three phasefault [2]. Similar low/zero voltage ride through requirementshave evolved in most European countries, each with varying
Manuscript received February 27, 2007; revised November 3, 2007. Thiswork was supported by the Sponsors of the Wisconsin Electric Machines andPower Electronics Consortium (WEMPEC) at the University of Wisconsin-Madison and the Link Foundation Energy Fellowship. Recommended for pub-lication by Associate Editor Z. Chen.
The authors are with the University of Wisconsin-Madison, Madison, WI53706 USA (e-mail: [email protected]; [email protected]).
Digital Object Identifier 10.1109/TPEL.2008.921179
specifications on minimum voltage level and requiring provi-sions of real or reactive power during fault events [3], [4]. Whilemany grid codes also stipulate ride through of single and twophase faults, only balanced faults are considered in this paper.
In a conventional DFIG wind turbine the machine statorwindings are connected to the grid PCC via collection and/ortransmission transformers and excited at the grid frequency.The rotor windings of the DFIG are connected to an acdcconverter commonly referred to as the machine side converter(MSC). The ac side of a second dcac converter, commonlyreferred to as the grid side converter (GSC), is connected inparallel with the machine stator windings and PCC.
Severe voltage sags and the resulting stator flux response placesignificant electrical stress on the MSC and mechanical stress onthe gearbox. In the stationary frame the stator flux is equal tothe integral of the stator voltage minus stator resistive drop. Anabrupt stator voltage change produces a constant dc componentof stator flux in proportion to the voltage drop [5]. This dc statorflux component appears as an oscillatory electromagnetic field(EMF) when translated into the synchronous and rotor referenceframes [6]. Deep sags and correspondingly large EMF in the rotorreference frame cause the MSC to go into over-modulation, re-sulting in loss of rotor current regulation [7]. The uncontrolledrotor currents can exceed the semiconductor device ratings andresult in damage the MSC. In addition, this commonly precipi-tates high transient stator currents and transient torque spikes [8].
Several options have been proposed to improve low voltageDFIG ride through. Two modification to the rotor circuit in-cluding the addition of either an silicon controlled rectifier(SCR) rotor crowbar circuit [8] or a three phase rectifier andmodulated resistive load have demonstrated improvement in theDFIG ride-through capability [9], [10]. As an alternative, briefdisconnection of the stator windings during a voltage sag viaan SCR static switch [11] has also been shown to reduce torqueand current spikes for sags to 15% of nominal. A modified rotorcurrent control method has been shown to protect the MSC forwind tubine terminal voltage down to about 30% of nominal,with residual torque spikes and oscillations [7].
From an alternate perspective, the authors of [12] first pro-posed using an inverter connected to the Y point of the DFIG,in series with the stator windings, for the purposes of dampingsynchronous frame stator flux oscillations. The presence of theconverter in series with the stator winding allows a direct handlewith which to access the stator flux state variable. The use of aseries connected grid side converter was first considered for thepurposes of voltage sag ride briefly in [13], but it properties and
0885-8993/$25.00 2008 IEEE
-
FLANNERY AND VENKATARAMANAN: FAULT TOLERANT DFIG WIND TURBINE 1127
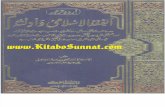
Fig. 1. Schematic of DFIG architecture with PGSR and SGSC.
limitations were not studied in depth to develop a definitive solu-tion. Further exploration of the series grid side converter DFIGarchitecture [14], [15] revealed excellent potential for voltagesag ride through but also short comings in power processingcapability.
A unified DFIG architecture in which the series grid side con-verter is partnered with a parallel grid side rectifier is presentedas an alternative for both DFIG wind turbine power processingand robust voltage sag ride through. This paper, an extension ofwork originally presented in [16], is organized in the followingmanner: Section II presents a dynamic model and block dia-gram of the unified DFIG wind turbine architecture; steady statepower processing capabilities are outlined in Section III, moti-vating detailed control design in Section IV. Computer simula-tion results are presented in Section V to verify successful op-eration of the system to both PCC voltage sags and wind speedvariations.
II. DFIG ARCHITECTURE SYSTEM AND MODEL
A. System DescriptionA detailed schematic of the three phase power converters,
stator and rotor windings of the DFIG, and the interconnectiontransformer is shown in Fig. 1. As in a conventional DFIG, themain stator windings of the machine are connected, via trans-former, to the line excitation. The rotor windings of the machineare accessed via slip rings and connected to the machine sideconverter (MSC). The dc terminals of the MSC are connectedto a full bridge diode rectifier referred to as the parallel grid siderectifier (PGSR) which is excited from the line via transformer.The dc link is also connected to a second voltage source con-verter called the series grid side converter (SGSC).
As may be observed in Fig. 1, the Y point of the stator ter-minals DFIG are opened and the three stator return terminals ofthe machine are individually connected to the three phase legs ofthe SGSC. The three phase ac voltage output of the SGSC addsto the voltage from the farm collection network to yield the netstator voltage. Thus the stator current also passes through theSGSC providing the mechanism for power transfer and effec-tive grid disturbance ride through. As an alternative realization,the DFIG stator Y point may be maintained closed and a 3 phaseseries injection transformer can be used to connect the GSC be-tween the collection network voltage and main stator windings[15], such as in a dynamic voltage restorer [17].
Fig. 2. Conventions and notation of space vectors and reference axes.
B. System ModelThe electrical model for the system is developed using dy-
namic phasors or complex space vectors in the synchronouslyrotating reference frame [18]. An illustration of the axesconventions appears in Fig. 2. The default convention assumedhere aligns the -axis with the positive real axis and the -axiswith the negative imaginary axis, and the complex vector
.
In certain instances it is convenient to locate the real andimaginary axes aligned with a particular complex vector, forinstance , in which case the axes are designated andrespectively, and the real and (negative) imaginary componentswith respect to the reference are designated and , a re-spectively.
The following simplifying assumptions are made in the de-velopment of the model.
1) The iron losses, mechanical and power converter losses arenegligible.
2) The magnetic circuit of the machine can be represented bya linear model.
3) The entire mechanical system can be modeled using alumped inertia parameter referred to the electrical angleand speed of the induction generator.
4) The power converters can be modeled using state-spaceaveraged representation to represent their low frequencydynamics.
5) The wind farm collection network to PCC is electricallystiff.
The conventional DFIG T circuit is transformed into an equiv-alent circuit [19]. The system equivalent circuit model underthese assumptions is shown in Fig. 3. The complete set of non-linear state equations are
(1)
where is the unit step function.
-
1128 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 3, MAY 2008
Fig. 3. Dynamic phasor circuit model of unified DFIG electrical architectureand mechanical system.
Fig. 4. Schematic representation of power flow breakdown in a classical DFIGwind turbine configuration.
The complex vector dynamic state equations are used forthe evaluation of steady state properties and the developmentof control laws. The dynamic states of the system include thestator flux, , rotor current , rectifier current , dc linkvoltage, , and rotor speed, . Controllable inputs to thesystem include the complex voltage vectors for the MSC andSGSC, and respectively. Since the PGSR is a passivenetwork, its conduction state is determined by the state of thediode illustrated in Fig. 3, which conducts when the voltageis greater than . The mechanical power generated at the windturbine shaft is proportional to the coefficient of performanceand the cube of the wind speed. The mechanical torque produc-tion due to wind energy capture can be throttled via the bladepitch actuators.
III. STEADY STATE OPERATION
A. Power FlowFig. 4 illustrates the power flow across the stator and rotor
circuits in a classical DFIG configuration that uses bidirectionalpower converters in the rotor circuit [13]. It is well known thatthe breakdown in the flow of electrically generated power outof the DFIG stator and rotor terminals depends only on the ma-chine slip, , if electrical losses in the machineare neglected. Since there is no significant energy storage or dis-sipation in the dc link, the total power out of the rotor circuit isdelivered to the ac network.
It may be observed that the rotor circuit processes negativepower (i.e., absorb power from the ac network) at subsyn-
Fig. 5. Space vector diagram of stator circuit voltages and currents for unifiedDFIG architecture with only SGSC under UUPF operation at supersynchronousspeeds.
chronous speeds, and process positive power (i.e., deliverpower into the ac network) at supersynchronous speeds.B. Operation With SGSC Only
Having determined the power throughput across differentconverter elements of the proposed DFIG system, the nextstep is to determine the actual voltages and currents necessaryto realize power flow. The case with the PGSR disabled andSGSC enabled alone is considered first, and used to developthe functional properties and operating strategy for the overallsystem.
To develop a preliminary conceptual understanding of thepower flow phenomena in the overall DFIG system, the statorcircuit and the SGSC are all first assumed to be unity powerfactor. These conditions are termed universal unity power factoroperation (UUPF) and are relaxed further to provide an addi-tional degree of freedom later.
The PCC/farm collector voltage is assumed to be the refer-ence phasor for alignment of the positive -axis (i.e., ).Since the PCC/farm collector terminals, stator terminals andSGSC terminals are all assumed to operate at unity power factor,their corresponding voltages may be related in terms of their re-spective throughput powers as
(2)
Eliminating from (2), we obtain
(3)
Substituting for the ratio of powers in from Fig. 4, the statorterminal voltage and the SGSC terminal voltages may be deter-mined to be
(4)
Furthermore, from Fig. 3, the DFIG stator voltage may be ex-pressed as the sum of the farm collector node and SGSC volt-ages as in
(5)1) Supersynchronous Operation: A phasor diagram of the
stator current and various voltages under UUPF supersyn-chronous operation is shown in Fig. 5. All the stator circuitphasors are located along the real axis. For 0 in (4), itmay be observed that , and 0. Therefore,
-
FLANNERY AND VENKATARAMANAN: FAULT TOLERANT DFIG WIND TURBINE 1129
Fig. 6. Space vector diagram of stator, SGSC and farm collector voltages, andstator current with -axis SGSC and stator voltage to increase stator voltagemagnitude.
operating the machine under UUPF approach leads to reducedstator voltage and stator flux. This leads to reduced utilizationof machine capability at supersynchronous speeds.
Since it would be typically desirable for the DFIG to operateat rated stator voltage (and flux) for full utilization of machinecapability, the UUPF constraint will need to be relaxed. In thiscase, the phasors and remain on the real axis while thephasors and are free to move along the dotted line shownin Fig. 5. The voltage loci still follow the KVL expressed in(5). The -components of voltages still follow (4) to maintainthe overall power transfer conditions, and the -components ofstator and SGSC voltages are identical. Thus, adequate -axisvoltage may be injected using the SGSC which will be balancedby an equal amount of -axis voltage across the stator terminals.
A positive -axis voltage injection with a subscript isillustrated in Fig. 6 to restore the stator voltage magnitude tounity. It can be shown that positive -axis voltage injection leadsto minimum net reactive power to the magnetic circuit of theDFIG, together from the SGSC and MSC. Furthermore, in thecase of unity power factor at the farm collector node, the statorand SGSC reactive powers must be equal
(6)The SGSC reactive power (generator convention) is
(7)
which can be simplified to
(8)
The stator reactive power (motor convention) is equal to
(9)
Substituting (8) and (9) into (6) yields
(10)
As can be seen in (10) either the d-component of the SGSCvoltage or -component of the MSC current can be used asa handle on the reactive power. However the -component ofthe SGSC voltage is also tied to the stator flux magnitude andthus torque production. Therefore the -component of the SGSCvoltage will be used to set the flux level in the machine and the
Fig. 7. SGSC voltage magnitude versus rotor speed to maintain 1 per unit statorflux during supersynchronous operation.
Fig. 8. Space vector diagram of stator circuit voltages and currents for unifiedDFIG architecture with only SGSC under UUPF operation at subsynchronousspeeds.
-component of the MSC current will be used to maintain netzero reactive power at the farm collector/PCC terminals.
From the phasor diagram in Fig. 6, the -component of theSGSC voltage is
(11)
In terms of the approximate stator flux (neglecting ohmic drop)and the -component of stator voltage from (4) yields
(12)
A plot of the magnitude of SGSC voltage versus rotor speed forunity magnitude stator flux is presented in Fig. 7. This choiceof stator flux magnitude set at 1 p.u. produces maximum torqueper ampere of rotor current.
Interestingly, this result was derived by considering only thepower flow requirements of the SGSC and constraining the statorflux to 1 per unit magnitude. It can be shown that machine pa-rameters such as stator resistance affect this result only weaklythrough ohmic voltage drop and leakage reactances have no ef-fect. However, if it is desired to control the magnetizing flux to1 per unit magnitude (as opposed to the stator flux) the effectsof stator leakage reactance must be accounted for.
2) Subsynchronous Operation: A phasor diagram of thestator current and stator side voltages under UUPF operation atsubsynchronous speeds is shown in Fig. 8. For 0 in (4), itmay be noted that , and 0. Operation in thismode would lead to stator over-voltage and hence over-fluxing
-
1130 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 3, MAY 2008
TABLE IPOWER CONVERTER VA RATINGS
and saturation of the magnetic circuit. Thus, operation of theSGSC for steady state power processing during subsynchronousspeeds is unviable.
However, since the DFIG rotor circuit receives power fromthe ac terminals of the MSC under subsynchronous operation,the PGSR readily takes on the role of maintaining dc link powerbalance, even if the SGSC is disabled. Thus, the unified DFIGarchitecture presented in Fig. 1 maintains functionality over thecomplete operating speed.
C. Power Converter RatingsThe required semiconductor rating for the proposed DFIG
wind turbine architecture based on steady state power pro-cessing requirements is presented in Table I. The ratings weredetermined by solving the dynamic state (1) for steady stateoperation assuming negligible machine resistances. These rat-ings are based on the division of power processing as describedin the previous section, namely that the SGSC meets all ofthe steady state power requirements during supersynchronousoperation, while maintaining the stator flux magnitude at 1 perunit.
During subsynchronous operation the PGSR takes up the roleof maintaining the dc link voltage, and thus supplying power tothe rotor circuit. The power factor at the PCC is assumed heldto unity. Consequently the SGSC and MSC combine to meetthe DFIGs reactive power demands during supersynchronousoperation, and the MSC meets all of the DFIG reactive powerdemands during subsynchronous operation.
Due to the cubic nature of the power-speed characteristicsof the turbine, the power production drops quickly for smallwind speeds, resulting in a small power flow (in per unit) intothe PGSR during subsynchronous operation. Furthermore, sincethe PGSR is a passive network realized using diodes, its cost islower compared with an active acdc converter.
The SGSC is directly connected to the Y point of the DFIG,and shares the same current as the stator circuit. While both theSGSC and MSC share the same dc bus, there is still sufficientflexibility to adjust the voltage and current ratings of the SGSCindependently of the MSC.
For a given design power out of the DFIG stator circuit,the nominal stator current can be increased/decreased by de-creasing/increasing the nominal stator voltage. The nominalDFIG stator voltage is set by the ratio of the achievable invertervoltage to per unit SGSC voltage. For a 1000 V dc bus this isequal to
(13)
Restated another way, for a given system power rating, in-creasing the nominal stator voltage will reduce the per unit
Fig. 9. Control structure for unified DFIG architecture with SGSC and PGSR.
SGSC VA rating by reducing the stator/SGSC current, withoutchanging the dc link voltage. The designed rotor to stator turnsratio is adjusted to achieve MSC compatibility with the dc bus.
The converter VA ratings of the MSC and GSC in theclassical DFIG architecture, in which the grid side converterconnected in parallel with the machine stator windings, are onthe order of 0.34 VA pu each [13], for a total converter VAof approximately 0.68 pu. However, as discussed in the Intro-duction, this architecture requires additional accomodations toachieve voltage sag ride-through, each with varying degreesacceptability. The proposed DFIG architecture with PGSRand SGSC requires 1.04 VA pu of fully active inverters, anda 0.08 VA pu diode rectifier. As will be shown in Section V,simulation of the proposed architecture to grid voltage sags isshown to be quite acceptable.
IV. CONTROL DESIGN
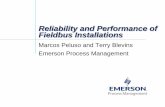
The overall control objectives for the unified DFIG wind tur-bine architecture include regulation of the rotor speed, electricalpower production (via torque), dc link voltage, stator flux mag-nitude and reactive power at the farm collector node. These ob-jectives are realized in a hierarchical fashion as illustrated inFig. 9. The plant is augmented by measurement, command gen-eration and control functions, as illustrated.
The command generation blocks for the MSC and SGSC areused to develop the torque, reactive power and stator flux magni-tude commands as described in Section IV-A below. The controlof MSC consists of the rotor field oriented control with rotor cur-rent control forming an inner loop, as described in Section IV-Bbelow. The control of SGSC consist of the dc link voltage regu-lator with stator flux control forming the inner loop as describedin Section IV-C below. Turbine rotor over-speed is regulated viablade pitch actuators to reduce the coefficient of performanceand throttle mechanical torque production. The measurementfunctions are used to develop the feedback and feed forwardsignals for the various regulators and command generation.
-
FLANNERY AND VENKATARAMANAN: FAULT TOLERANT DFIG WIND TURBINE 1131
A. Command Generation1) Torque and Reactive Power Command Generator: The
torque command profile for the machine follows the optimumtip-speed-ratio at low and medium rotor speeds [20]. The com-mand for the component of rotor current associated with reactivepower is generated from the sum of algebraic calculation from(9) plus the output of a low bandwidth PI loop acting on thefarm collector reactive power error. The farm collector reactivepower is nominally commanded to zero.
2) Stator Flux Magnitude Command Generator: As notedin the introduction, the farm collector voltage drop during asag event produce a problematic component of the stator flux,which appears as either dc or oscillator in the stationary andsynchronous frames respectively. To eliminate this componentof stator flux it is desirable to have the stator flux magnitudescale in proportion to the farm collector voltage (including statorohmic drop). The resulting command for the stator flux magni-tude is equal to
(14)
In the absence of any changes in the rotor current, this also nat-urally scales the torque production in the DFIG, preventing ex-cessive swelling of the dc link voltage during sag events. Thisstator flux magnitude command feeds into the dc link controller,which determines the angle of the stator flux vector commandfor the inner stator flux control loop.
B. MSC Control1) Rotor Current Controller: Control of the rotor current is
achieved via a high bandwidth stator flux aligned proportionalcontroller which generates modulation functions for the MSC.Estimates of machine parameters, measurements of rotor cur-rent, stator and dc link voltage, rotor and slip speeds, and an es-timate of the stator flux are further used to improve steady stateand dynamic tracking accuracy and disturbance rejection [21].
2) Rotor FOC: Electromagnetic torque is controllable via thecomponent of the rotor current orthogonal to the stator flux, .The reactive power at the farm collector node is controlled the bycomponent of the rotor current that is collinear with the statorflux, . The two components of the rotor current commandare combined to produce the desired rotor current space vectorcommand.
C. SGSC Control1) Stator Flux Controller: The stator flux controller is the
key feature of the proposed control law that transforms theundesirable oscillatory synchronous frame stator flux responseduring faults into a well behaved and bounded exponentialdynamic response. Secondly, but equally important is the factthat the stator flux is the inner state by which the dc link voltageis controlled, as described in Section IV-C-II. An illustration ofthe stator flux controller is presented in Fig. 10, and the desiredSGSC voltage expressed as
(15)
Fig. 10. Block diagram of the stator flux controller.
The stator flux controller is a stator current aligned syn-chronous frame proportional loop to generate the modulationfunctions for the SGSC. The purpose of stator current alignmentwill be explained in the dc link controller section. Estimatesof machine parameters, measurements of rotor current, farmcollector node and dc link voltage, excitation frequency, andan estimate of stator flux are further used to improve trackingaccuracy and disturbance rejection, similar to conventionalcurrent regulators [21].
The stator flux in the stationary reference frame (superscripts) can be estimated from the stator voltage and current and anestimate of the stator resistance as [22]
(16)
Substituting the SGSC voltage (15) into the stator flux state (1)yields
(17)
If, for the purposes of the present analysis, the estimatedsystem parameters such as , , and are assumed to beperfectly accurate, and the dynamics of the stator flux estimatorare neglected (i.e., ), then (17) reduces to
(18)
This is a classical first order differential equation with onereal eigenvalue at . This closed loop system is stable forall 0, and larger gain values result in a higher closed loopbandwidth and better regulation of the stator flux as a inner con-trol loop handle on the dc link voltage. However, too large avalue of the may lead to suboptimal system realization, as il-lustrated further. For instance, during a step change in the farmcollector voltage magnitude down to zero, and stator flux com-mand also scaled to zero keeping step with the voltage, the con-trol action would nominally produce an exponential response ofthe stator flux space vector equal to
(19)
-
1132 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 3, MAY 2008
Fig. 11. Space vector diagram of stator, SGSC and farm collector voltages,stator flux and current with constant SGSC power locus and constant stator fluxmagnitude circle.
Thus, a high proportional gain would have the benefit ofbringing the stator flux into equilibrium with a sag farm voltagequickly. Unfortunately the trajectory of the stator flux duringthis transition also impacts the regulation of the rotor currentsby the MSC during sag events. Differentiating (19) yields
(20)
Rearranged the rotor current state (1) in terms of the stator fluxand it derivative yields
(21)
If the angle between the stator current reference frame and farmcollector voltage reference frame approximated to be a constantduring the flux decay interval (i.e., ), from(18) and (19), it may be noticed that in order to maintain ade-quate rotor current control, large values of would require alarge rotor voltage. Thus there exists a trade-off in the selectionof . A value of 2 50 rad/s was found to provide anadequate balance between fast stator flux response, while pre-venting excessive rotor current transients during sag events.
2) DC Link Regulator: During supersynchronous operation,the SGSC is used to transfer power from the rotor circuit (via dclink) to the ac grid, thereby maintaining control of the dc linkvoltage. Assuming that the PGSR is inactive (i.e., the dc linkvoltage is regulated such that the PGSR diodes do not conduct)the dc link voltage state (1) can be expressed in terms of thestator flux as
(22)
It may be seen that the dc link voltage can be controlled bychanging the angle of the stator flux with respect to the statorcurrent via the term (or equivalently )without affecting the torque producing variables, namelyand . The relationship between the d-component of thestator flux and power from the SGSC can be seen more clearlyin the space vector diagram presented in Fig. 11.
The power from the SGSC is proportional to the q-componentof the SGSC voltage in the stator current reference frame. FromKVL expressed in (5), this also means that the SGSC power
is related to the difference between the q-components of farmand stator voltage. Due to the relationship between the statorvoltage and stator flux the -component ofthe stator voltage corresponds to the -component of the statorflux. Hence, the -components of stator flux in the stator currentreference frame can serve as a handle to affect the SGSC powerand thus dc link voltage.
Feedback or exact linearization was selected for control de-sign due to the wide variation in the product terms, such as statorcurrent, over the operating range. Feedback linearization trans-forms the nonlinear relationship between the controllable input,
, and the output to the system, , into a one in which thedynamic relationship between the error, , and newinput is linear and exhibits a first order response [23]. Applica-tion of the feedback linearization process yields the followingrelationship for the commanded -component of the stator flux:
(23)
Combining (22) and (23) yields
(24)
It may be observed that under the input defined by (23), the errordynamics of the dc link voltage is a classic first order differentialequation with a real eigenvalue at . For the ideal case ofan infinite bandwidth on the stator flux controller, this closedloop system is stable for all 0, and larger gain valuesresult in better regulation of the dc link voltage. However, theupper limit is constrained by the bandwidth of the inner statorflux controller loop. Hence, the dc link controller gain is chosento be 2 30 rad/s, about a factor of two slower than the flux loop.
In order to prevent the SGSC dc link controller fromattempting to regulate the dc link during subsynchronous op-eration (and consequently over-fluxing the DFIG), a saturationblock limits the -component of the stator flux command to
(25)
as would occur at 0. The limit for -component stator fluxcommand (25) is set to be the stator magnitude command. Atsynchronous speed, these quantities are equal and the -com-ponent of stator flux approaches zero. The -component of thestator flux command is found using the geometric relationship
(26)
D. Turbine Speed ControllerBeyond the control range offered by the electrical system
through rotor circuits, the turbine rotor speed is controlled bythrottling the mechanical torque through pitching of the turbineblades. The command rotor speed is set to the maximum allow-able value at high wind speeds. The rotor speed error drives aPI regulator to command the appropriate pitch angle. Saturationblocks prevent blade pitch actuation unless the rotor speed erroris positive.
-
FLANNERY AND VENKATARAMANAN: FAULT TOLERANT DFIG WIND TURBINE 1133
Fig. 12. Simulated response of a 2 MW DFIG wind turbine unified architecturewith SGSC and PGSR to ramp changes in wind speed.
V. DYNAMIC RESPONSEA detailed computer simulation model of an example system
was developed. The model included all the machine and con-troller details presented in the previous sections. A list of nu-merical values of machine parameters used in the simulation ispresented in the Appendix. Selected waveforms from the simu-lations of the system are presented in this section. Estimated cir-cuit parameters used in the controller are assumed to be under-estimated by for 5% for resistances and overestimated by 10%for inductances. Phase locked loops are used to prevent loss ofreference frame alignment during the voltage sag events.
The response of the system to changes in wind speed,showing transition from supersynchronous to subsynchronousoperation and vice-versa is presented in Fig. 12. An averagedmodel of the two voltage source inverters is used to representtheir behavior during these slow varying transients. As maybe observed, the controller successfully manages the transitionbetween sub- and super-synchronous operation in a smoothmanner, particularly handing over the dc link power balancebetween SGSC and PGSR. The average SGSC dc link current is
equal to zero during subsynchronous operation. However therewill still be ripple current on the dc link due to high frequencyinverter switching during steady state. An alternative controlscheme to reduce switching losses could place the SGSC ina standby mode during normal subsynchronous operation,enabling only to respond to voltage sags as described in [15].
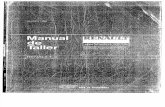
The response of the wind turbine architecture to voltage sagis presented in Fig. 13. A switched circuit model is assumed forthe two voltage source inverters. A voltage sag that drops allthree phase voltages at the wind farm collection node to 0 p.u.and lasts for 150 ms (nine cycles) is applied at the wind farmcollection terminal voltage . The traces of Fig. 13(a) and (b)represent the response during sub- and super-synchronous oper-ating speeds, respectively. As may be observed from the figures,the stator flux features smooth and bounded transients during thesag event. All other key variables also exhibit a well behaved re-sponse within the design boundaries of the system.
VI. CONCLUSIONProvision of adequate ride-through capability under utility
fault conditions has been known to be a challenging problemfor wind generation systems that use doubly fed induction ma-chines with dc link power converters in the rotor circuit. Thispaper has briefly reviewed existing ride through techniques, andintroduced an improved unified architecture that is inspired bypower quality improvement devices such as the dynamic voltagerestorer.
The unified architecture maintains an active machine sideconverter to recover the rotor slip power into the dc link as in thetraditional DFIG system. However, a series-connected grid sideconverter is used to inject the dc link power into the grid. Thisenables machine operation with tight regulation of stator fluxduring normal conditions and during voltage sags. Although thisapproach is capable of controlled power flow over a typical oper-ating range above and below synchronous speed, it is shown thatmachine utilization suffers at subsynchronous speeds. There-fore, a parallel connected passive rectifier rated at a small frac-tion of the total power throughput is used to restore maximalutilization of the overall system. A detailed dynamic electricalmodel for the system along with solutions for steady state oper-ation is presented in the paper to elucidate these aspects.
A scheme for control of the DFIG system that incorporatesfield oriented control to regulate torque, stator flux and dc linkvoltage is presented. The proposed controller features unitypower factor at the farm collection terminals. Design detailsof the series grid side converter controllers are presented. Acomputer simulation of the entire system is used to verify theperformance.
Waveforms of selected quantities from the computer simula-tion that demonstrate performance during transitions betweensub- and super-synchronous speeds in response to changes inwind speed are presented. Successful ride-through performanceof the system during a deep voltage sag event is also demon-strated using computer simulations. The computer simulationresults indicate excellent ride-through performance with smoothand well bounded transient in comparison to existing solutions.Moreover, the series connected grid side converter is also ex-pected to enable operation during unbalanced sags with relative
-
1134 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 3, MAY 2008
Fig. 13. Simulated response of a 2 MW DFIG wind turbine unified architecturewith SGSC and PGSR to voltage sag during: (a) subsynchronous operation and(b) supersynchronous operation.
ease, as has been demonstrated in dynamic voltage restorer sys-tems that feature a similar architecture.
TABLE IISIMULATION PARAMETERS
TABLE IIINOMENCLATURE
TABLE IVSUBSCRIPTS
APPENDIX
See Tables IIV.
-
FLANNERY AND VENKATARAMANAN: FAULT TOLERANT DFIG WIND TURBINE 1135
TABLE VSUPERSCRIPTS
REFERENCES[1] I. Erlich and U. Bachmann, Grid code requirements concerning con-
nection and operation of wind turbines in Germany, in Proc. IEEEPower Eng. Soc. General Meeting, Jun. 1216, 2005, pp. 22302234.
[2] Federal Energy Regulator Commission, Regulatory Order 661-A: In-terconnection for Wind Energy, 2005 [Online]. Available: http://www.ferc.gov/industries/electric/indus-act/gi/wind.asp
[3] D. Marin, H. Camblong, X. Guillaud, and M. Rodriguez, Compar-ison of wind turbines technical regulations, in Proc. Int. Conf. Ind.Technol., 2006, pp. 316321.
[4] I. Erlich, W. Winter, and A. Dittrich, Advanced grid requirements forthe integration of wind turbines into the German transmission system,in Proc. IEEE Power Eng. Soc. General Meeting, 2006, pp. 77.
[5] J. Lopez, P. Sanchis, X. Roboam, and L. Marroyo, Dynamicbehavior of the doubly fed induction generator during three-phasevoltage dips, IEEE Trans. Energy Conversion, vol. 22, no. 3, pp.709717, Sep. 2007.
[6] M. Heller and W. Schumacher, Stability analysis of doubly-fed induc-tion machines in stator flux reference frame, in Proc. 7th Eur. Conf.Power Electron. Appl., Sep. 810, 1997, vol. 2, pp. 707710.
[7] D. Xiang, L. Ran, P. Tavner, and S. Yang, Control of a doubly fedinduction generator in a wind turbine during grid fault ride-through,IEEE Trans. Energy Conversion, vol. 21, no. 3, pp. 652662, Sep. 2006.
[8] J. Morren and S. W. H. de Haan, Ridethrough of wind turbines withdoubly-fed induction generator during a voltage dip, IEEE Trans. En-ergy Conversion, vol. 20, no. 2, pp. 707710, Jun. 2005.
[9] J. Niiranen, Voltage dip ride through of a doubly fed generatorequipped with active crowbar, in Proc. Nordic Wind Power Conf.,Gothenburg, Sweden, 2004, [CD ROM].
[10] I. Erlich, H. Wrede, and C. Feltes, Dynamic behavior of DFIG-basedwind turbines during grid faults, in Proc. 4th Power Conversion Conf.,2007, pp. 11951200.
[11] A. Dittrich and A. Stoev, Comparison of fault ride-through for windturbines with DFIM generators, in Proc. 11th Eur. Conf. Power Elec-tron. Appl., Sep. 2005, pp. 18.
[12] C. K. W. Schumacher, Active damping of flux oscillations in doubly-fed ac machines using dynamic variation of the systems structure, inProc. 9th Eur. Conf. Power Electron. Appl., 2001, [CD ROM].
[13] A. Petersson, Analysis Modeling and Control of Doubly-Fed Induc-tion Generators for Wind Turbines, Ph.D. dissertation, Chalmers Univ.Technol., Goteborg, Sweden, 2005.
[14] P. Flannery and G. Venkataramanan, A grid fault tolerant doublyfed induction generator wind turbine via series connected grid sideconverter, in Proc. WINDPOWER Conf., Pittsburgh, PA, 2006, [CDROM].
[15] P. Flannery and G. Venkataramanan, Evaluation of voltage sag ride-through of a doubly fed induction generator wind turbine with seriesgrid side converter, in Proc. 38th Annu. Power Electron. Spec. Conf.,Jun. 2007, pp. 18391845.
[16] P. Flannery and G. Venkataramanan, A unified architecture for doublyfed induction generator wind turbines using a parallel grid side rectifierand series grid side converter, in Proc. 4th Power Conversion Conf.(PCC), Apr. 2007, pp. 14421449.
[17] J. Nielsen and F. Blaabjerg, A detailed comparison of system topolo-gies for dynamic voltage restorers, IEEE Trans. Ind. Appl., vol. 41, no.5, pp. 12721280, Sep./Oct. 2005.
[18] D. Novotny and T. Lipo, Vector Control and Dynamics of ac Drives.Oxford, U.K.: Oxford Univ. Press, 2000.
[19] G. Slemon, Modelling of induction machines for electric drives, IEEETrans. Ind. Appl., vol. IA-25, no. 6, pp. 11261131, Nov./Dec. 1989.
[20] J. Ekanayake et al., Dynamic modeling of doubly fed induction gen-erator wind turbines, IEEE Trans. Power Syst., vol. 18, no. 2, pp.803809, May 2003.
[21] F. Briz, M. Degner, and R. Lorenz, Analysis and design of currentregulators using complex vectors, IEEE Trans. Ind. Appl., vol. 36, no.3, pp. 14241432, May/Jun. 2000.
[22] B. Hopfensperger, D. Atkinson, and R. Lakin, Stator-flux-orientedcontrol of a double-fed induction machine with and without positionencoder, Proc. Inst. Elect. Eng., vol. 147, no. 4, pp. 241250, Jul. 2000.
[23] J. Slotine and W. Li, Applied Nonlinear Control. Upper Saddle River,NJ: Prentice-Hall, 1991.
Patrick S. Flannery (S01) received the B.S. degreein mechanical engineering from the PennsylvaniaState University, University Park, in 1998 and theM.S. degree in electrical engineering from theUniversity of Wisconsin-Madison in 2003, where heis pursuing the Ph.D. degree.
From 1998 to 2001, he was an ElectromechanicalEngineer with CSA Engineering, Mountain View,CA. He is currently a Research Assistant at theUniversity of Wisconsin-Madison. His researchinterests include the application power electronics,
electric machines, and control to renewable energy generation.
Giri Venkataramanan (M92SM06) received theB.E. degree in electrical engineering from the Gov-ernment College of Technology, Coimbatore, India,in 1986, the M.S. degree from the California Insti-tute of Technology, Pasadena, in 1987, and the Ph.D.degree from the University of Wisconsin, Madison,in 1992.
After teaching electrical engineering at MontanaState University, Bozeman, he returned to the Uni-versity of Wisconsin, as a faculty member in 1999,where he continues to direct research in various areas
of electronic power conversion as an Associate Director of the Wisconsin Elec-tric Machines and Power Electronics Consortium (WEMPEC). He holds severalU.S. patents and has coauthored more than 100 technical publications.