551303 Vibration and System...
73
551303 Vibration and System Modeling
Transcript of 551303 Vibration and System...
551303
Vibration and System Modeling
2
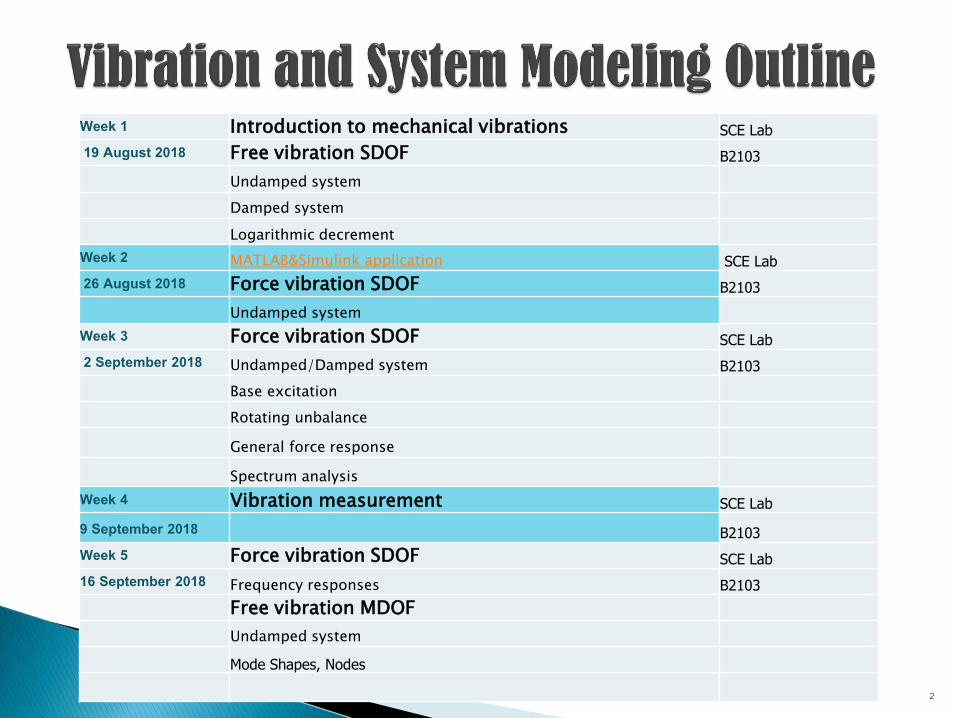
Week 1 Introduction to mechanical vibrations SCE Lab
19 August 2018 Free vibration SDOF B2103
Undamped system
Damped system
Logarithmic decrement
Week 2 MATLAB&Simulink application SCE Lab
26 August 2018 Force vibration SDOF B2103
Undamped system
Week 3 Force vibration SDOF SCE Lab
2 September 2018 Undamped/Damped system B2103
Base excitation
Rotating unbalance
General force response
Spectrum analysis
Week 4 Vibration measurement SCE Lab
9 September 2018 B2103
Week 5 Force vibration SDOF SCE Lab
16 September 2018 Frequency responses B2103
Free vibration MDOF
Undamped system
Mode Shapes, Nodes
3
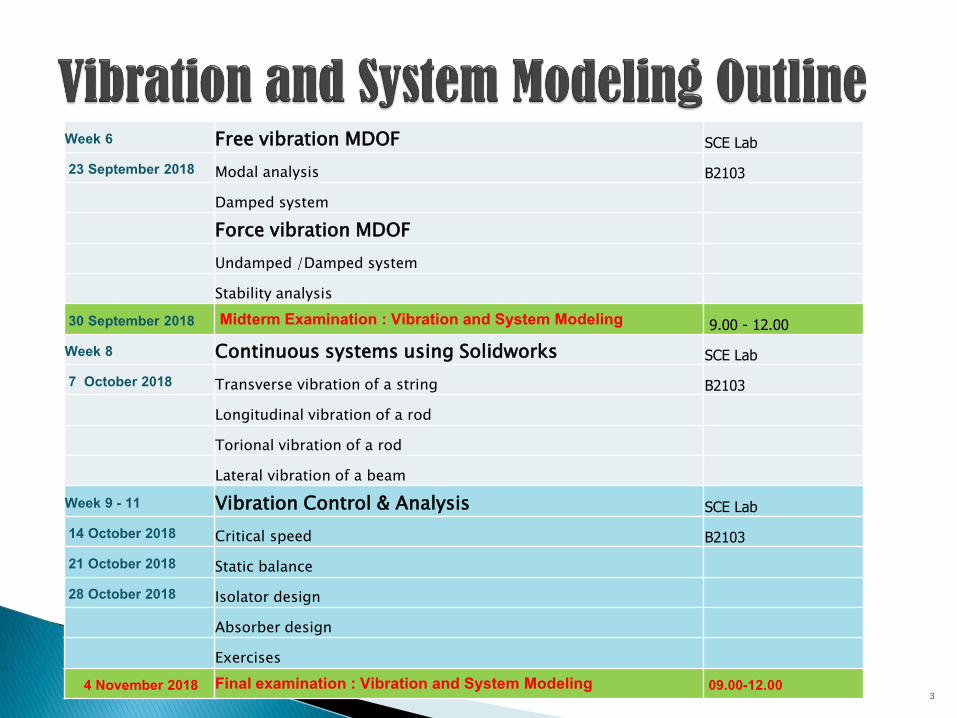
Week 6 Free vibration MDOF SCE Lab
23 September 2018 Modal analysis B2103
Damped system
Force vibration MDOF
Undamped /Damped system
Stability analysis
30 September 2018 Midterm Examination : Vibration and System Modeling 9.00 - 12.00
Week 8 Continuous systems using Solidworks SCE Lab
7 October 2018 Transverse vibration of a string B2103
Longitudinal vibration of a rod
Torional vibration of a rod
Lateral vibration of a beam
Week 9 - 11 Vibration Control & Analysis SCE Lab
14 October 2018 Critical speed B2103
21 October 2018 Static balance
28 October 2018 Isolator design
Absorber design
Exercises
4 November 2018 Final examination : Vibration and System Modeling 09.00-12.00

4
4
• A 80-100• B+ 75-79• B 70-74• C+ 60-69• C 50-59• D+ 45-49• D 40-44• F 0-39
First Exam: 40 %
Second Exam: 35 %
Home work, Quiz , Practice: 25 %

55
Recommended reading : Singiresu S.Rao : Mechanical Vibration(Fourth Edition),
Prentice Hall 2004. SI Edition Daniel J.Inman:Engineering Vibration,Third Edition,Pearson Education,2008 Leonard Meirovitch : Fundamentals of Vibrations , Mc-Graw Hill 2001. Kelly S. Graham : Fundamentals of Mechanical Vibrations,
Mc-Graw Hill 2000.
เอกสารค าสอน: Mechanical Vibrations, Srisertpol, 2014

The Spring-Mass-Damper model
Degree of Freedom (DOF)
Relationship between Displacement, Velocity and Acceleration
Representations of harmonic motion
Classification of mechanical vibration
7School of Mechanical Engineering 7

8School of Mechanical Engineering 8

9

10
11
12
13
14

15
รถงคณลกษณะตางๆของการสนทางวศวกรรม เขาใจถงพฤตกรรมการสนของระบบ หรอโครงสราง ซงน าไปสความเสยหาย
ใชเปนแนวทางในการออกแบบการควบคมการสน และการทดสอบการสน การแกปญหาการสนทเกดขนกบโครงสราง หรอระบบ

16
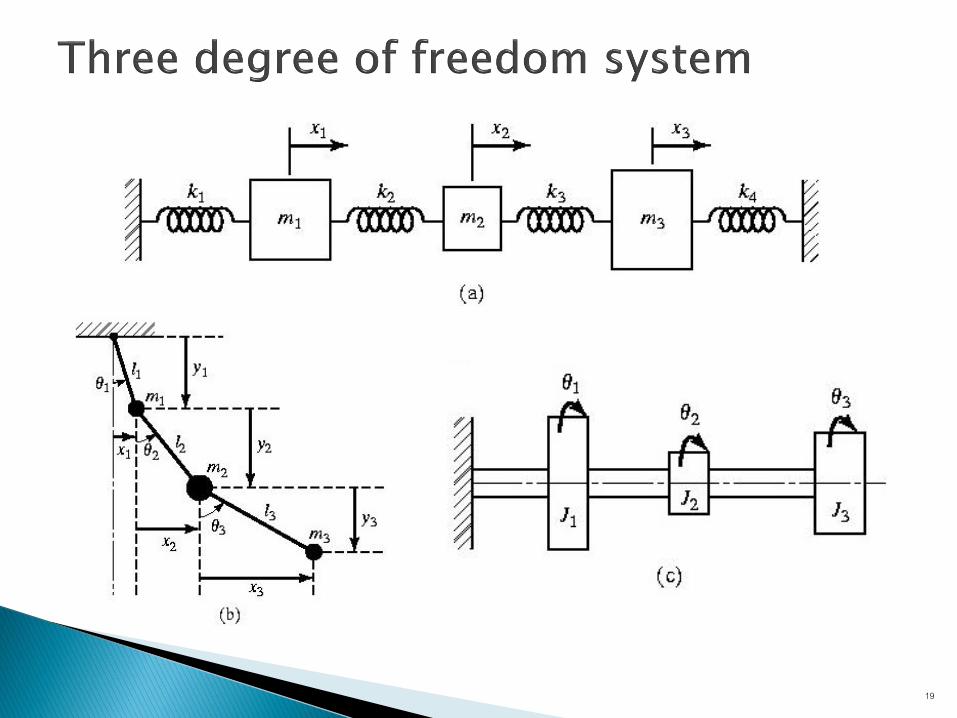
ล ำดบขนควำมเปนอสระ (Degree of Freedom, DOF) - จ ำนวนพกด(Coordinate) ทนอยทสดทไมขนตอกนซงจ ำเปนตองใชอธบำยต ำแหนงตำงๆ ของทกสวนในระบบทขณะเวลำหนง

17
Single degree of freedom system

18
19

20
21
Discrete System (Lumped System)-ระบบทสามารถก าหนดการเคลอนไหวไดดวยล าดบขนความอสระทจ ากดคาาหน ง
Continuous System (Distributed System)- ระบบทมล าดบขนความเปนอสระไมาจ ากด

22
การสนแบบอสระ (Free Vibration) การสนแบบบงคบ (Forced Vibration) การสนแบบไมามความหนาวง (Undamped Vibration) การสนแบบมความหนาวง (Damped Vibration) การสนแบบเชงเสน (Linear Vibration) การสนแบบไมาเชงเสน (Nonlinear Vibration) การสนแบบก าหนดได (Deterministic Vibration) การสนแบบสาม (Random Vibration)
23
คอการสนของระบบในลกษณะทหลงจากมการรบกวนระบบทหยดนงอยาทจดสมดลครงแรกเพอท าใหเกดการสนข นแลว การสนนนด าเนนตาอไปโดยไมามแรงจากภายนอกมากระท ากบระบบอกเลย
การรบกวนระบบอาจจะเปนการท าใหเกดการขจด หรอท าใหเกดความเรวเรมตนหรอทงสองแบบรวมกน
24
คอการสนของระบบภายใตแรงกระท าจากภายนอก ซ งแรงกระท าจากภายนอกนอาจจะเปนแรงในลกษณะซ าหรอไมาซ าตวเองกได
การสนในลกษณะน เชาน การสนเนองจากความไมาสมดลของเครองจกรทเกดการหมน
ถาความถในลกษณะแบบนไปพองกบความถธรรมชาตของระบบ การสนนจะมลกษณะทมชาวงกวาง (amplitude) การสนทสงมาก เราเรยกการสนลกษณะนวาาการสนพอง (Resonance)

25
หมายถ งการสนทไมามการสญเสยพลงงานใหกบสงแวดลอมของระบบไมาวาาจะอยาในรปแรงเสยดทาน หรอแรงตานอนใด
เมอระบบเคลอนทแบบไมามความหนาวงจะท าใหพลงงานรวมของระบบในระหวาางการเคลอนทนมคาาคงท
การสนทไมามความหนาวงของระบบจรงจะเกดข นไดในอวกาศเทาานน การสนแบบไมามความหนาวงและการสนแบบอสระความถของระบบจะ
เรยกวาา ความถธรรมชาต (Natural Frequency)

26
หมายถ งการสนทมการสญเสยพลงงานในระหวาางเกดการเคลอนทของระบบ ไมาวาาดวยสาเหตใดกตาม
โดยทวไปแลวการสนตามสภาพความเปนจรงนนจะเปนการสนแบบมความหนาวงแทบทงสน

27
ระบบของการสนซ งประกอบดวย มวล สปรง และตวหนาวง มพฤตกรรมเปลยนแปลงคาาของแรงกระท าไปอยาางเชงเสนกบระยะทางหรอความเรวของพกดทใช
การสนแบบเชงเสนเราสามารถใช หลกของการรวมต าแหนาง(Principle of Superposition)

28
ระบบของการสนซ งประกอบดวย มวล สปรง และตวหนาวง มพฤตกรรมเปลยนแปลงคาาของแรงกระท าไปอยาางไมาเปนเชงเสนกบระยะทางหรอความเรวของพกดทใช
29
ระบบทเกดการสนอยาภายใตแรงกระท ำจำกภำยนอกลกษณะใดกตาม ถาแรงทกระท าอยานนสามารถก าหนดขนาดของแรงไดหรอทราบคาาความสมพนธของแรง ซ งเปนฟงกชนของเวลาทแรงนนกระท า

30
ระบบทเกดการสนอยาภายใตแรงกระท าจากภายนอกลกษณะใดกตาม ถาแรงทกระท าตาอระบบไมาสามารถก าหนดขนาดของแรงได
31
Springs Elements Damping Elements Mass or Inertia Elements
32
Stiffness (N/m)
Young’s modulus (N/m²)
Density (kg/m³)
Shear modulus G(N/m²)
Springs in series
Springs in parallel

33
Potential energy Spring force
kxF =
stiffness springor contant spring−k
tion)nt(deformadisplaceme−x
2
2
1 :spring in theenergy Potential kxU =
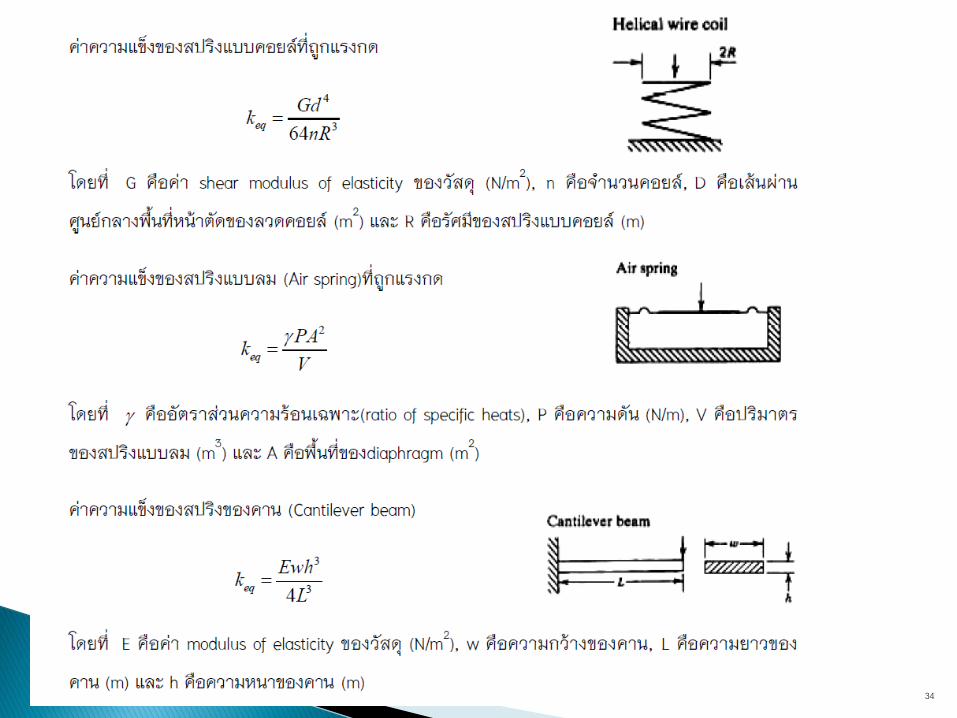
34
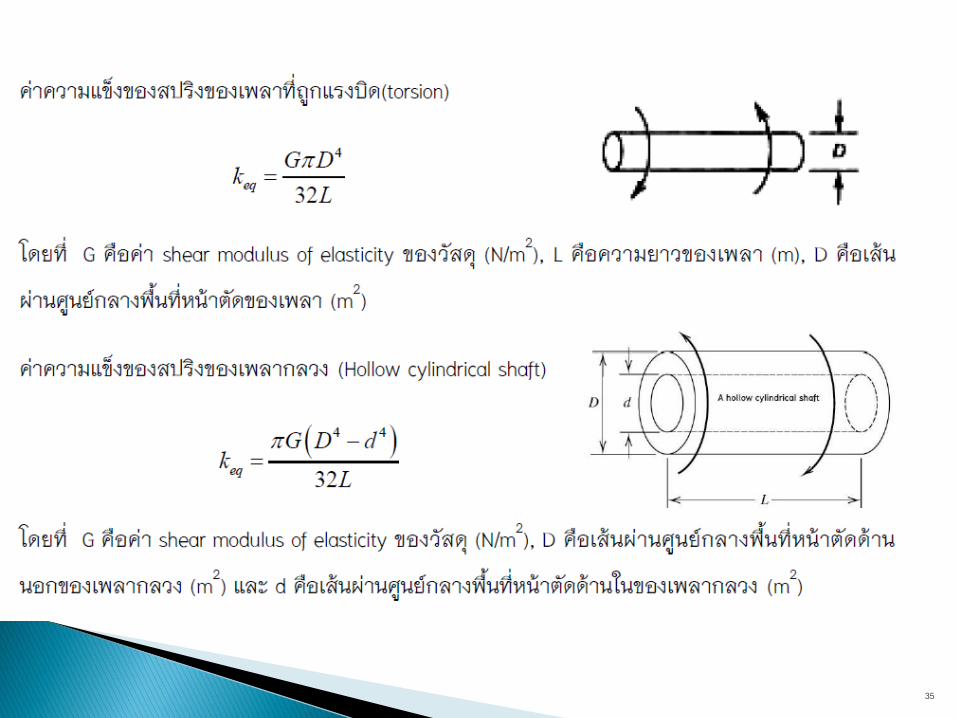
35
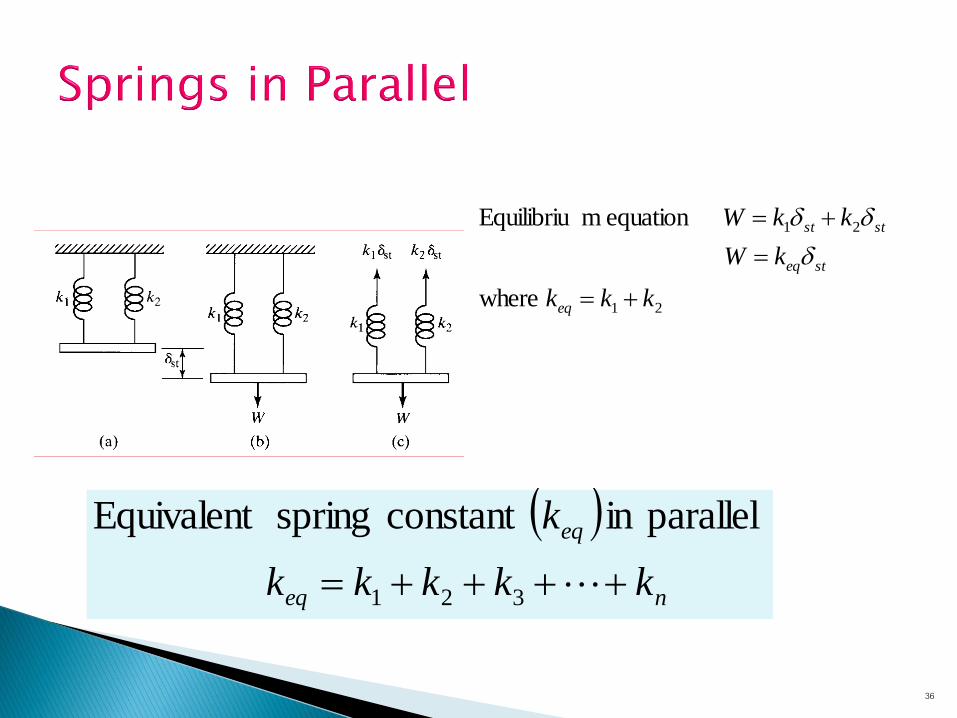
36
where
equation mEquilibriu
21
21
kkk
kW
kkW
eq
steq
stst
+=
=
+=
( )
neq
eq
kkkkk
k
++++= 321
parallelin constant spring Equivalent

37
( ) 21 system theof Static 1. +=stst
22
11
equation mEquilibriu 2.
kW
kW
=
=
steqeq kWk = deflection static same for the .3
( )
neq
eq
kkkkk
k
11111
seriesin constant spring Equivalent
321
++++=
, or
2
2
1
1
2211
k
k
k
k
kkk
steqsteq
steq
==
==
21
111 is, that
kkkeq
+=
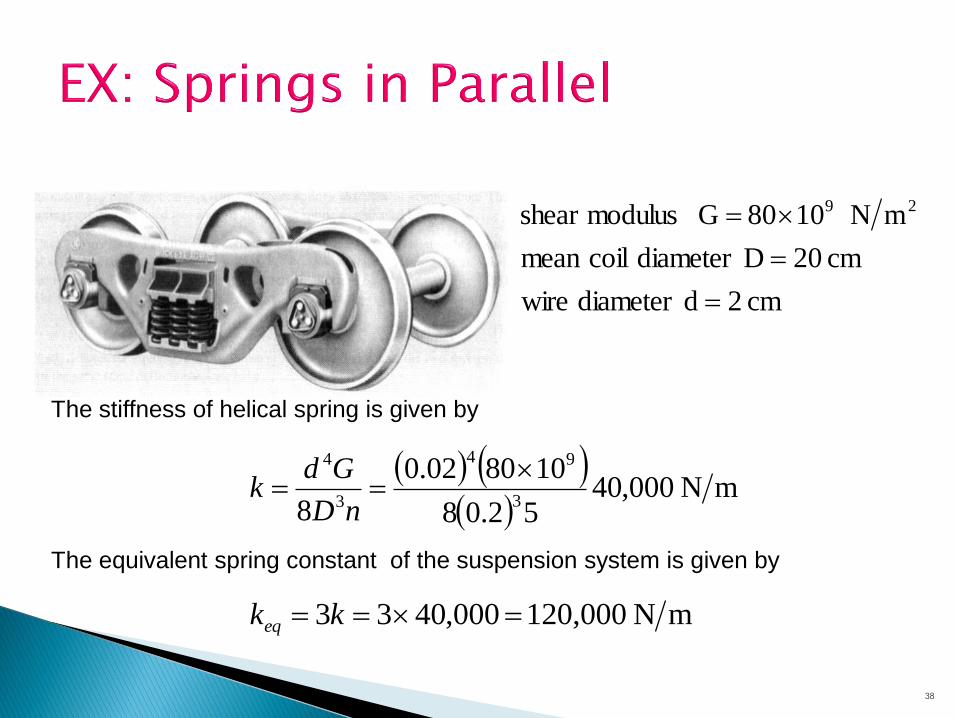
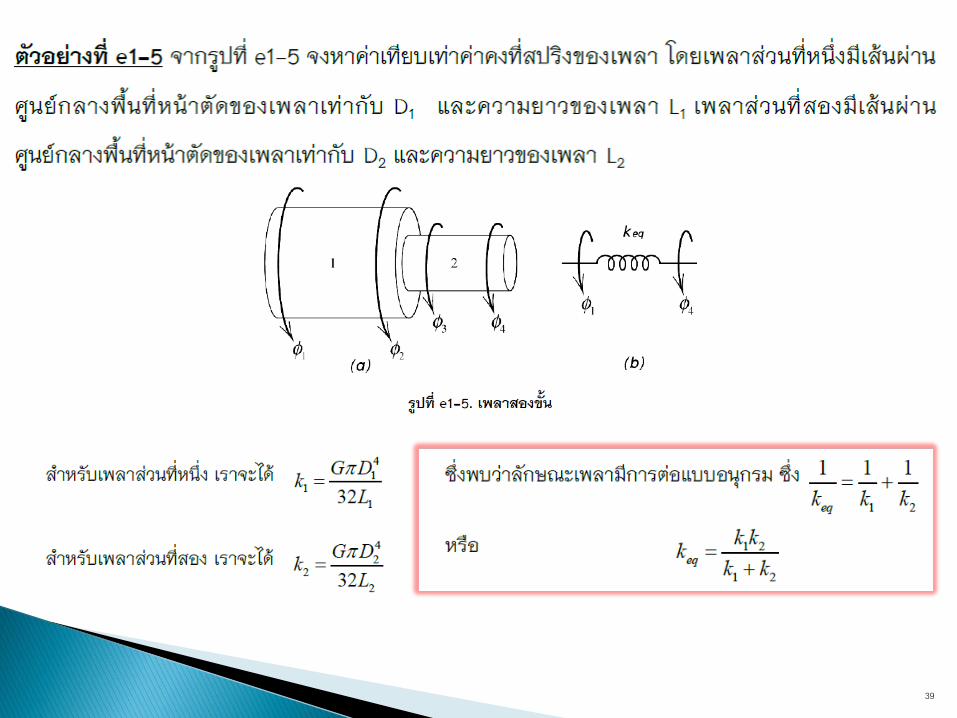
38
cm 2ddiameter wire
cm 20Ddiameter coilmean
mN 1080G modulusshear 29
=
=
=
The stiffness of helical spring is given by
( ) ( )( )
mN 000,4052.08
108002.0
83
94
3
4 ==
nD
Gdk
The equivalent spring constant of the suspension system is given by
mN 120,000 000,4033 === kkeq
39

40
ตวหนวงเนองจากความหนด (Viscous Damping) ตวหนวงเนองจากแรงเสยดทานระหวางของแขงกบของแขง (Dry
Friction or Coulomb Damping) ตวหนวงเนองจากความไมยดหยนของวสด (Hysteretic Damping or
Structural Damping)
41
42
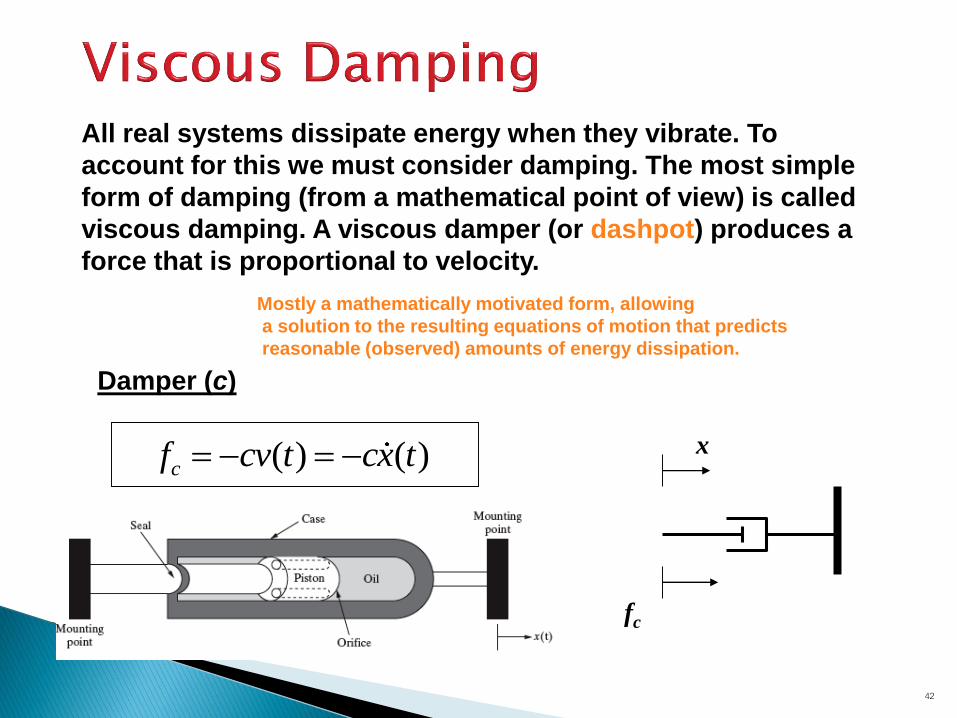
All real systems dissipate energy when they vibrate. To
account for this we must consider damping. The most simple
form of damping (from a mathematical point of view) is called
viscous damping. A viscous damper (or dashpot) produces a
force that is proportional to velocity.
Damper (c)
( ) ( )cf cv t cx t= − = − x
fc
Mostly a mathematically motivated form, allowing
a solution to the resulting equations of motion that predicts
reasonable (observed) amounts of energy dissipation.

43
( )
neq
eq
cccc
c
1111
seriesin constant damping Equivalent
21
++=
( )
321
parallelin constant damping Equivalent
cccc
c
eq
eq
+++=
44
DamperDamping coefficientCritical damping coefficientDamping ratio

45
Underdamped MotionOverdamped MotionCritically Damped Motion
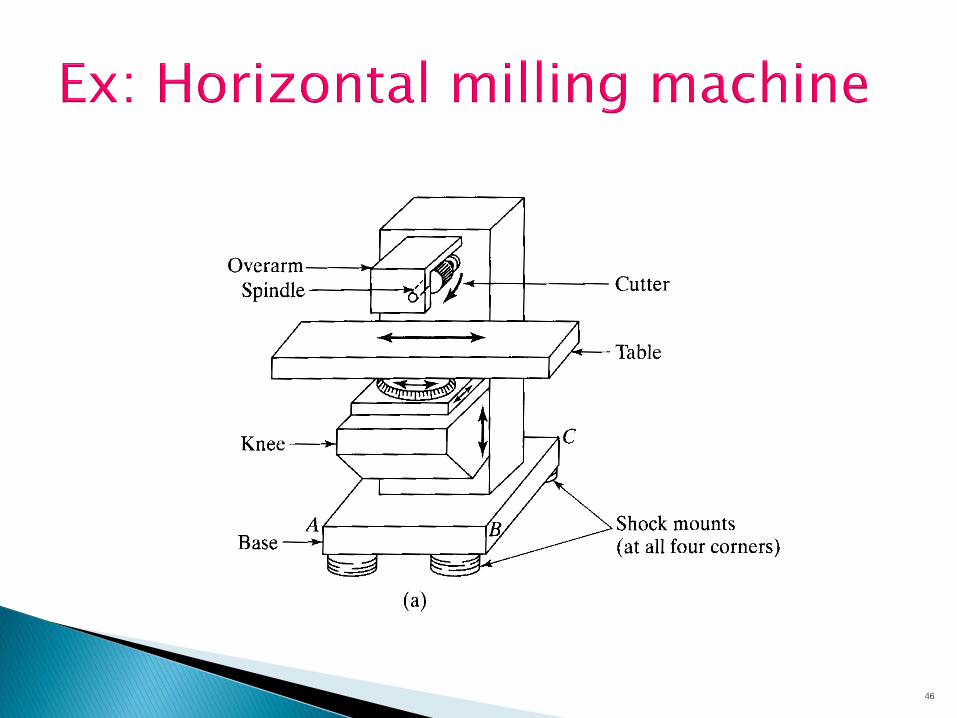
46
47
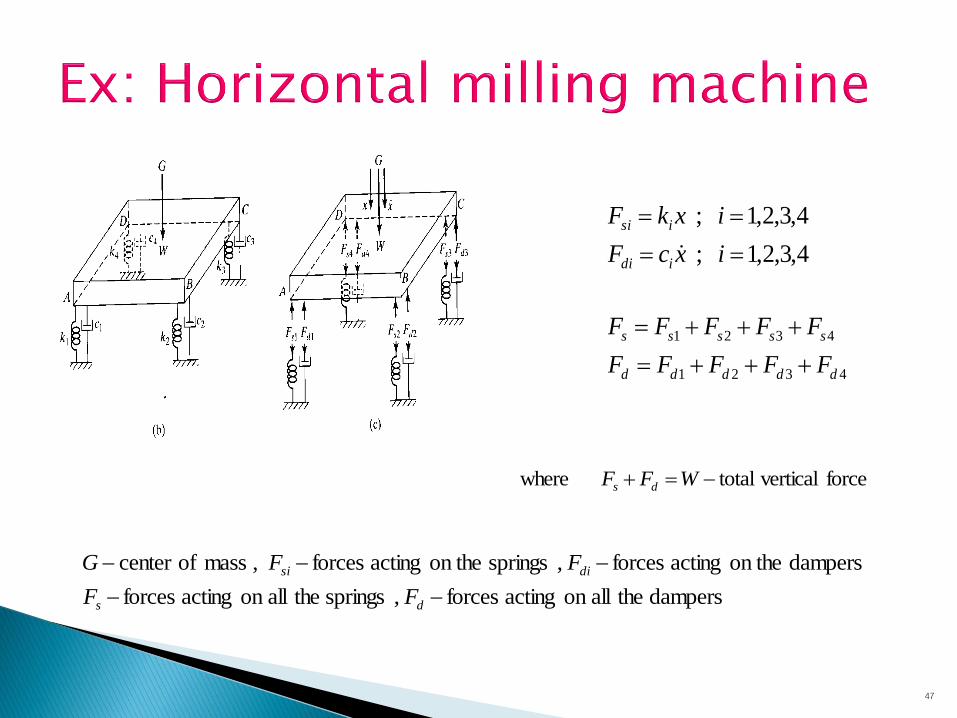
dampers theallon acting forces , springs theallon acting forces
dampers on the acting forces , springs on the acting forces , mass ofcenter
−−
−−−
ds
disi
FF
FFG
4,3,2,1 ;
4,3,2,1 ;
==
==
ixcF
ixkF
idi
isi
4321
4321
ddddd
sssss
FFFFF
FFFFF
+++=
+++=
force verticaltotal where −=+ WFF ds
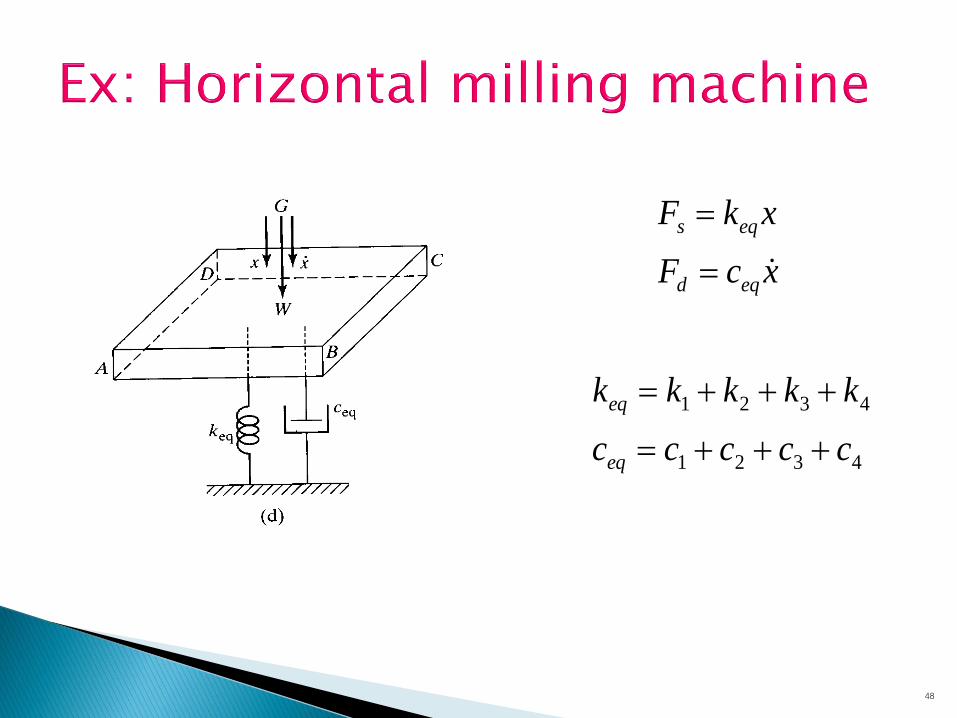
48
xcF
xkF
eqd
eqs
=
=
4321
4321
ccccc
kkkkk
eq
eq
+++=
+++=
49
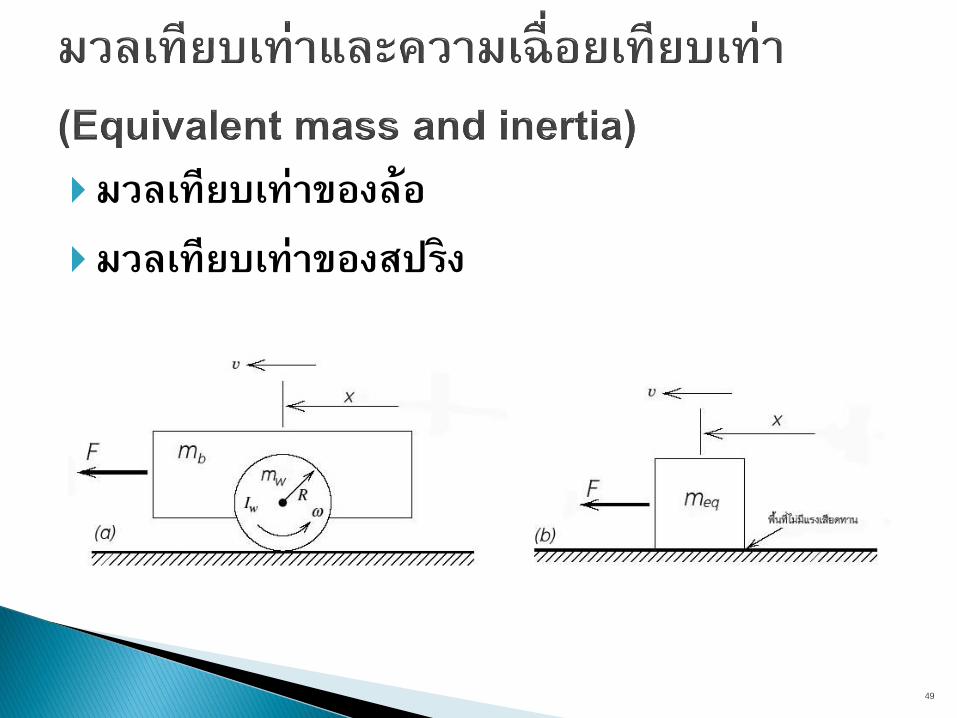
มวลเทยบเทำของลอมวลเทยบเทำของสปรง

50

51
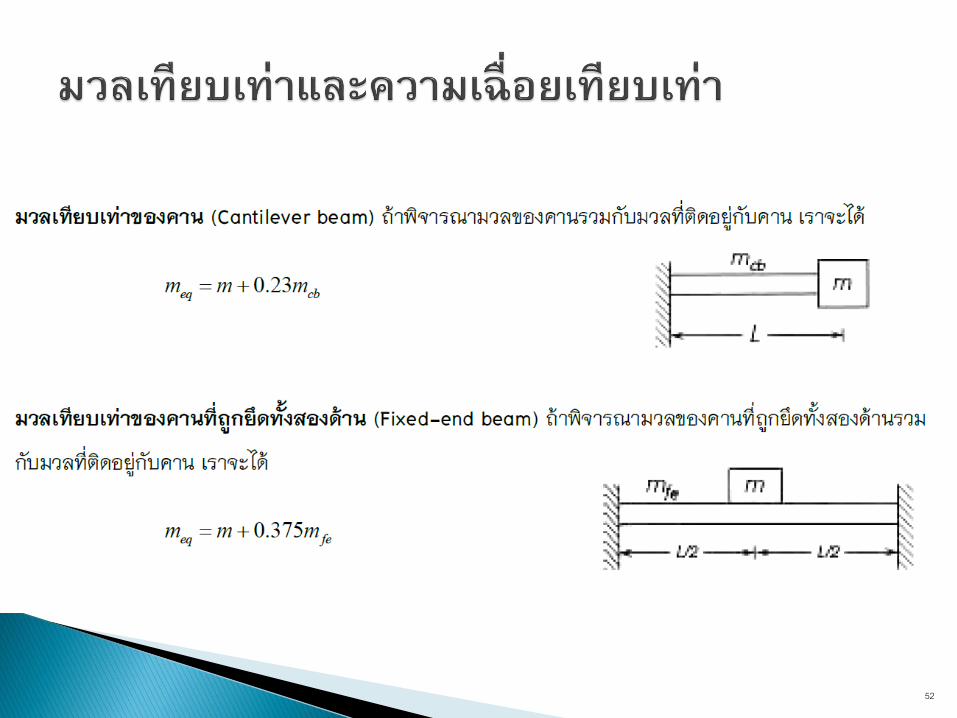
52

53
ตวอยำงท e1-10 พจารณารปท e1-15(a) มมวลจ านวน 3 มวลวางไวบนคานทระยะตาางๆกนทมจดหมน o ซ งเราสามารถพจารณาแทนมวลทงสามดวยมวลเทยบเทาา
54
กำรสรำงแบบจ ำลองทำงคณตศำสตร (Mathematical Modeling) การหาสมการการเคลอนท (Derivation of Governing Equations) การหาผลเฉลยสมการการเคลอนท (Solution of Governing
Equations) กำรวเครำะหผลทได (Interpretation of the Results)
55
การสรางสมมตฐานเบองตนของระบบทเกดการสน โดยแทนสงทมจรงดวยแบบจ าลองทางกายภาพ เชาน
แทนแหลางสะสมพลงงานศกยทกแบบในระบบดวยสปรง(spring )
แทนสงทท าใหเกดการสญเสยพลงงานดวยตวหนาวง(damped) แทนสงทเปนแหลางสะสมพลงงานจลน ดวย มวล(mass), ควำมเฉอย
56
แทนสมการการเคลอนทของระบบเขากบแบบจ าลองทสรางข นมาซ งอาจจะไดมาหลายวธ เชาน
✓ กฎการเคลอนทของนวตน (Newton’s laws)✓ กฎการอนรกษพลงงาน (Conservation of energy principle)✓ สมการลากรานส (Lagrange’s equations)✓ D’Alembert’s principle
57
การแกสมการอนพนธ การเปลยนรปของลาปลาซ (Laplace’s transform) วธเชงตวเลข (Numerical method)
Dynamic System Modeling and Analysis, Hung V Vu and Ramin S. Esfandiari,
McGraw-Hill 1998

58
สามารถอธบายและสรปผลลพธทได • ขนาดของแรงทกระท า, ความถ• ลกษณะการเคลอนท• ความเรว, ความเราง และระยะกระจด

59
60
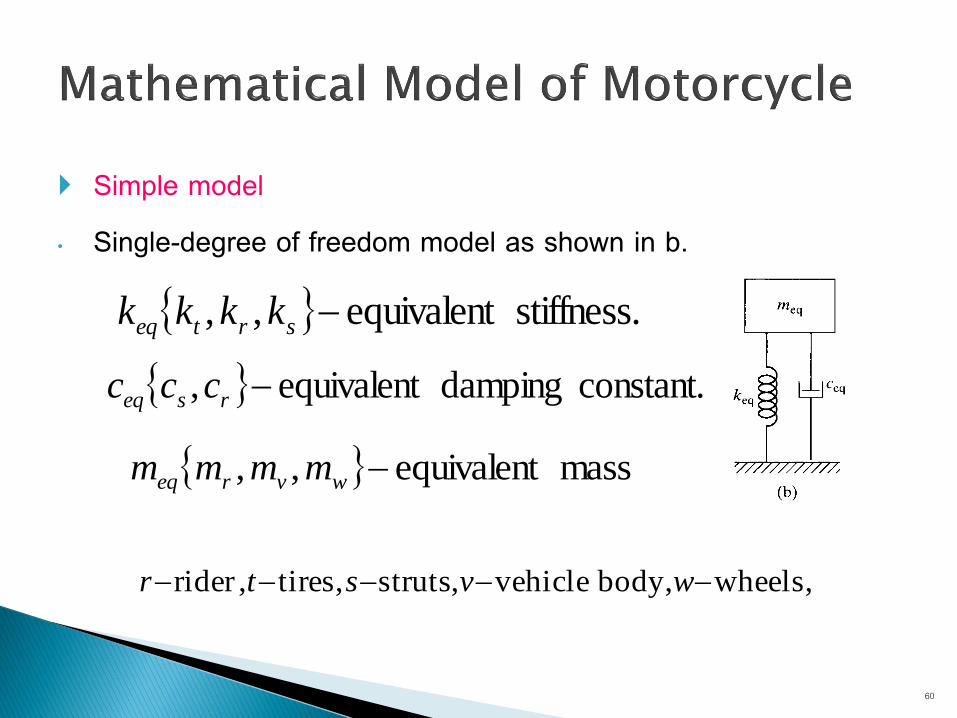
Simple model• Single-degree of freedom model as shown in b.
stiffness. equivalent,, −srteq kkkk
constant. damping equivalent, −rseq ccc
mass equivalent,, −wvreq mmmm
wheels, body, vehicle, struts tires,,rider −−−−− wvstr

61
wheels, body, vehicle, struts tires,,rider −−−−− wvstr

62
wheels, body, vehicle, struts tires,,rider −−−−− wvstr

63
wheels, body, vehicle, struts tires,,rider −−−−− wvstr
การเคลอนทแบบฮารโมนกสอยาางงาาย(Simple harmonic motion)
รปแบบของฟงกชนฮารโมนกส (Forms of harmonicfunctions)
การสนทมขนาดแบบเอกโปแนนเชยล (Oscillations with exponential amplitude)
64

65
66
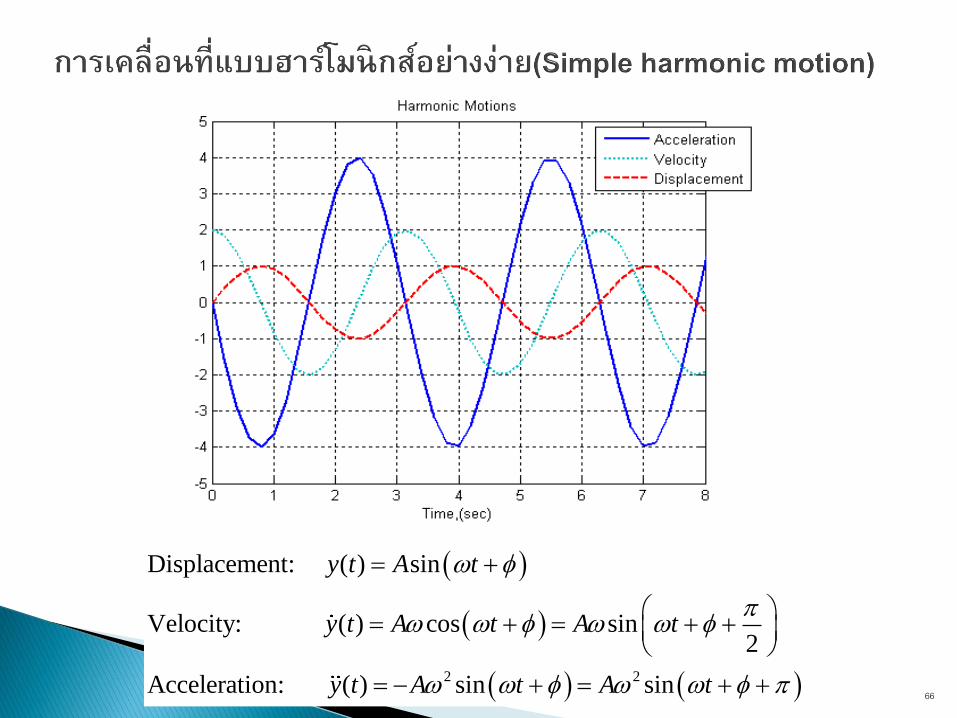
( )
( )
( ) ( )2 2
Displacement: ( ) sin
Velocity: ( ) cos sin2
Acceleration: ( ) sin sin
y t A t
y t A t A t
y t A t A t
= +
= + = + +
= − + = + +

670 1 2 3 4 5 6 7 8 9 10
-20
-15
-10
-5
0
5
10
15
20
Time,(sec)
Displacement
Velocity
Acceleration

68

69
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T, sec
T=1 sec
T= 0.5 sec
T= 2 sec

700 0.2 0.4 0.6 0.8 1 1.2 1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
X: 1
Y: 0.03663
Time, (sec)

71
0 2 4 6 8 10 12 14
-0.4
-0.2
0
0.2
0.4
0.6
Time, (sec)
y(t
)
0 2 4 6 8 10 12 14-800
-600
-400
-200
0
200
400
600
Time, (sec)
y(t
)

72

Degree of freedom
Types of vibration motion
Elements of Mechanical system Mass, Inertia
Damper
Spring
Vibration analysis procedure
Mathematical model
Simple harmonic motion
73
![LECT05 - MDOF Part 1 [Compatibility Mode]](https://static.fdocuments.us/doc/165x107/577cc1431a28aba711928c7c/lect05-mdof-part-1-compatibility-mode.jpg)