40
8
Consideration of CSI drive for SRM compared with VSI drive Takanori Nagai, Gaku Ando and KanAkatsu Shibaura institute of technology 3-7-5 Toyosu, Koto-ku, Tokyo, Japan [email protected] Abstract—This paper presents a consideration of the Current Source Inverter (CSI) drive for Switched Reluctance Motor (SRM) compared with the Voltage Source Inverter (VSI) drive. General SRM drive method is the current hysteresis control by using the VSI. However, a disadvantage of this drive is the current falling time is slow at the switching off period. On the other hand, the CSI drive for SRM has some advantages, fast di/dt is realized, constant current during on-state is realized and so on. However, the CSI drive has a fatal disadvantage which is large di/dt in the phase shift period resulting huge voltage spike by the back EMF. Then, in order to protect the switching devices from the voltage spike, the voltage clamp type current source inverter for the SRM drive has been proposed. The proposed drive method can suppress the voltage spikes. In this paper, the brief characteristics of the proposed CSI circuit are shown by some simulations. Moreover, in order to verify the proposed circuit phenomenon, a small size circuit is made and some experiments are performed by driving a small SRM. Keywords: Switched Reluctance Motor; Current Source Inverter; Voltage Clamp circuit I. INTRODUCTION Nowadays about 57% of electrical consumption is consumed by the electrical motor in Japan. Moreover, the electrical consumption is almost consumed by low efficiency Induction machines (IMs). On the other hand, although the Permanent Magnet Synchronous Machines (PMSMs) are high efficiency, the cost of PMSMs is expensive because the price of permanent magnet which is made of the rare metals; neodymium (Nd), dysprosium (Dy) and etc, becomes drastically expensive in recent years. Meanwhile silicon power semiconductor devices have been dramatically developed. These devices have high voltage pressure capacity and high current density. Therefore, not only motor structure but also inverter technique can improve the efficiency of motor drive system and reduce the electrical consumption. This study focuses on Switched Reluctance Motor (SRM) on behalf of low efficiency IMs since SRM has some advantages that easy construction, solid structure and low cost without permanent magnet. Adding that, it has also advantages of possible high speed rotation, ensuring high temperature condition because heat demagnetization is not caused due to magnet-less construction. However, SRM has some disadvantages that torque ripple, vibration and noises. Considering the drive method of SRM, the current hysteresis control by using voltage source inverter (VSI) is generally used. There are a lot of proposed techniques to reduce the torque ripple. For example, the exciting current for SRM was controlled as optimized wave form without making a structural change of SRM [1][2]. If the SRM has a large number of rotor and stator salient poles and salient pole width is wide, it is known that the torque ripple can be reduced with exciting two phase simultaneously [3]-[8]. However, these control methods cannot turn on and turn off quickly, because the EMF and the time constant negatively affect to the current rising or falling. The delay of current rising and falling time causes torque ripple and cupper loss. Then we focus on fast di/dt characteristic of Current Source Inverter (CSI). CSI can get a specific benefit when SRM is driven by CSI. Adapting CSI to the SRM drive has some advantages that it is possible to reduce the number of switching, the square current wave form can increase the effective current (RMS) and it is also possible to instantaneously shift the current conductive phase without the excessive current. However, the square current wave form generates huge induced voltage at the switching device because SRM has a large inductance. For example, when the load is induction motor (IM), with the terminal capacitors and PWM techniques, the surge voltage is absorbed by the terminal capacitors [10]. The terminal capacitors need three when the load is three phase. However, the volume of the all system becomes huge in case the number of phase is increased. So, a technique of circuit protection which using commutation capacitor and commutation circuit is proposed [11][12]. In addition, Quasi-current source inverter which uses a DC/DC converter to generate current source and a bypass diode to protect against surge voltage between the rectifier circuit and the inverter is also proposed [13]. However, the targets of these circuits are induction motor and permanent magnet motor, the circuits have not applied to SRM drive. To use CSI to SRM, we proposed a CSI which combines a voltage clamp circuit [9]. This proposed circuit is consisted of diode bridge circuit and clamp capacitor circuit to absorb the surge voltage. This paper presents an improved this CSI circuit to apply the SRM driving. This CSI can flow the square current wave form without the voltage spike and it is easy to expand the multiphase SRM driving. In this paper, the brief characteristics of the proposed CSI circuit are shown by the circuit simulation and some SRM drive experimental results are also shown. 1087 2012 IEEE 7th International Power Electronics and Motion Control Conference - ECCE Asia June 2-5, 2012, Harbin, China 978-1-4577-2088-8/11/$26.00 ©2012 IEEE
-
Upload
vinay-kumar -
Category
Documents
-
view
19 -
download
4
Transcript of 40

Consideration of CSI drive for SRM compared with
VSI drive Takanori Nagai, Gaku Ando and KanAkatsu
Shibaura institute of technology
3-7-5 Toyosu, Koto-ku, Tokyo, Japan
Abstract—This paper presents a consideration of the Current
Source Inverter (CSI) drive for Switched Reluctance Motor
(SRM) compared with the Voltage Source Inverter (VSI) drive.
General SRM drive method is the current hysteresis control by
using the VSI. However, a disadvantage of this drive is the
current falling time is slow at the switching off period. On the
other hand, the CSI drive for SRM has some advantages, fast
di/dt is realized, constant current during on-state is realized and
so on. However, the CSI drive has a fatal disadvantage which is
large di/dt in the phase shift period resulting huge voltage spike
by the back EMF. Then, in order to protect the switching devices
from the voltage spike, the voltage clamp type current source
inverter for the SRM drive has been proposed. The proposed
drive method can suppress the voltage spikes. In this paper, the
brief characteristics of the proposed CSI circuit are shown by
some simulations. Moreover, in order to verify the proposed
circuit phenomenon, a small size circuit is made and some
experiments are performed by driving a small SRM.
Keywords: Switched Reluctance Motor; Current Source
Inverter; Voltage Clamp circuit
I. INTRODUCTION
Nowadays about 57% of electrical consumption is consumed by the electrical motor in Japan. Moreover, the electrical consumption is almost consumed by low efficiency Induction machines (IMs). On the other hand, although the Permanent Magnet Synchronous Machines (PMSMs) are high efficiency, the cost of PMSMs is expensive because the price of permanent magnet which is made of the rare metals; neodymium (Nd), dysprosium (Dy) and etc, becomes drastically expensive in recent years. Meanwhile silicon power semiconductor devices have been dramatically developed. These devices have high voltage pressure capacity and high current density. Therefore, not only motor structure but also inverter technique can improve the efficiency of motor drive system and reduce the electrical consumption. This study focuses on Switched Reluctance Motor (SRM) on behalf of low efficiency IMs since SRM has some advantages that easy construction, solid structure and low cost without permanent magnet. Adding that, it has also advantages of possible high speed rotation, ensuring high temperature condition because heat demagnetization is not caused due to magnet-less construction. However, SRM has some disadvantages that torque ripple, vibration and noises.
Considering the drive method of SRM, the current hysteresis control by using voltage source inverter (VSI) is generally used. There are a lot of proposed techniques to
reduce the torque ripple. For example, the exciting current for SRM was controlled as optimized wave form without making a structural change of SRM [1][2]. If the SRM has a large number of rotor and stator salient poles and salient pole width is wide, it is known that the torque ripple can be reduced with exciting two phase simultaneously [3]-[8]. However, these control methods cannot turn on and turn off quickly, because the EMF and the time constant negatively affect to the current rising or falling. The delay of current rising and falling time causes torque ripple and cupper loss. Then we focus on fast di/dt characteristic of Current Source Inverter (CSI).
CSI can get a specific benefit when SRM is driven by CSI. Adapting CSI to the SRM drive has some advantages that it is possible to reduce the number of switching, the square current wave form can increase the effective current (RMS) and it is also possible to instantaneously shift the current conductive phase without the excessive current. However, the square current wave form generates huge induced voltage at the switching device because SRM has a large inductance. For example, when the load is induction motor (IM), with the terminal capacitors and PWM techniques, the surge voltage is absorbed by the terminal capacitors [10]. The terminal capacitors need three when the load is three phase. However, the volume of the all system becomes huge in case the number of phase is increased. So, a technique of circuit protection which using commutation capacitor and commutation circuit is proposed [11][12]. In addition, Quasi-current source inverter which uses a DC/DC converter to generate current source and a bypass diode to protect against surge voltage between the rectifier circuit and the inverter is also proposed [13]. However, the targets of these circuits are induction motor and permanent magnet motor, the circuits have not applied to SRM drive.
To use CSI to SRM, we proposed a CSI which combines a voltage clamp circuit [9]. This proposed circuit is consisted of diode bridge circuit and clamp capacitor circuit to absorb the surge voltage. This paper presents an improved this CSI circuit to apply the SRM driving. This CSI can flow the square current wave form without the voltage spike and it is easy to expand the multiphase SRM driving. In this paper, the brief characteristics of the proposed CSI circuit are shown by the circuit simulation and some SRM drive experimental results are also shown.
1087
2012 IEEE 7th International Power Electronics and Motion Control Conference - ECCE Asia June 2-5, 2012, Harbin, China
978-1-4577-2088-8/11/$26.00 ©2012 IEEE

II. DRIVING METHOD OF SRM
A. Construction of SRM
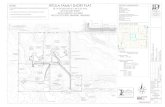
A cross-section diagram of SRM which has 4 poles and 6
slots is shown in Fig. 1. Transition diagram of inductance
with respect to each rotor position is shown in Fig. 2. From
Fig. 2, the inductance value is linearly varied with respect to
each rotor position. However actually, this value is varied
non-linearly. For this reason, it is difficult to control the current with conventional linear feedback control.
B. Voltage source inverter (VSI)
Conventional SRM drive method is the current hysteresis control by using the voltage source inverter. The circuit diagram, control block diagram and load current waveform of this drive method are shown in Figs. 3, 4 and 5 respectively.
As shown in Fig. 3, although the circuit structure is easy, it is difficult to drive multi-phase SRM because the current control circuit is required in each phase which makes the system large. The current rising and falling time (see Fig. 5) are slow, it leads to the excess cupper loss. Adding that, the current ripple in the period of the constant current is generated, it leads to the inverter switching loss and the iron loss.
C. Current source inverter (CSI)
Compared with the VSI as shown above, the CSI is not popular because it requires adding diode to
prevent the reverse current flow. However, the use of
CSI has some advantages,
Constant current can be added without current control.
High di/dt in the phase shift period enables to reduce the cupper loss and also enable to drive at high speed.
Switching loss can be reduced.
A basic circuit diagram of CSI, a control block diagram and load current waveform of this drive system are shown in
Fig. 3 SRM drive with VSI circuit diagram
Fig. 4 SRM drive with VSI control block diagram
Fig. 5 Load current waveform of the VSI
Fig. 6 Load current waveform of the VSI
Fig. 1 Cross-section diagram of SRM
Fig. 2 Variation of SRM inductance value
1088

Figs. 6, 7 and 8 respectively. Since it is difficult to make a constant current source, the chopper circuit with the current control is used (see Fig. 7).
Comparing the current waveforms in Fig. 5 and in Fig. 8, it is observed that the current rising and falling time of the CSI are shorter than that of the VSI. However, there are two fatal disadvantages that SRM has large inductance and di/dt is also large in the phase shift period. The EMF is generated by the fast di/dt and the large inductances, this voltage may
destroy switching devices. In order to protect them from that voltage, a voltage clamp type current source inverter for SRM drive is proposed, the detail is described in the next chapter.
III. PROPOSED CURRENT SOURCE INVERTER
A proposed current source inverter circuit and a control block diagram are shown in Fig. 9 and 10 respectively.
A. Structure of the proposed CSI circuit
The proposed circuit consists of three parts as follows.
1) Current source generation circuit (CSG): CSG part
uses DC-DC chopper with the current control to make the
constant DC current source.
2) Voltage clamp circuit (VCC): VCC part controls the
clamp capacitor voltage by using the single phase CSI in
order to reduce the spike voltage. By using this CSI circuit,
it is possible to reduce the voltage spike from the load side
inverter (LIC) even when the load current in LIC is
suddenly changed in the phase sift period. In order to
control the capacitor voltage, switch S and R are controlled
by the simple digital logic as shown in Fig. 11. Switch S and
R statements are decided by the capacitor voltage (VC) and
the bus current of LIC (IDC). The logic of switch S and R is
shown in Fig. 11.
Fig. 9 Clamp type current source inverter circuit (3-phase drive )
Fig. 10 Clamp type current source inverter control block diagram
Fig. 6 SRM drive with CSI circuit diagram
Fig. 7 SRM drive with CSI control block diagram
Fig. 8 Load current waveform of the CSI
1089

3) Load inverter circuit (LIC): LIC part is a SRM drive
circuit. Asymmetrical H bridge inverters which are
generally used for the SRM drive are used. The switches are
driven by the open control which depends on the motor
position, the current control is not required in LIC part.
Then, it is possible to reduce the swiching loss compared
with the current hysteresis control by using the VSI in LIC.
B. Circuit statement of the proposed CSI circuit
There are two switching mode in this proposed inverter. The first of the mode is a static state mode. In this mode, the SRM is conducted the static state current as shown in Fig. 12. The other is the transient state which means the load current shifts from the U-phase to the W-phase, for example, as shown in Figs. 13, 14 and 15.
In the steady state, the current of LIC is equal to the bus current of CSG which is controlled by the chopper circuit. The orange line shows the current flow when the switch Ss is turned on. The blue line shows it when the Ss is turned off.
The transient state is divided into two modes. One is the regeneration mode as shown in Fig. 13. The other is the release mode as shown in Fig. 14. The regeneration mode means the regeneration current from U-phase (the blue dash line) goes to the clamp capacitor in VCC (the orange dash line) until regeneration current decreases zero. In this mode, the capacitor voltage is charged and it excesses command voltage. Next, the release mode begins, the switch R keeps
turning on in order to reduce the capacitor voltage (the orange dash line) until the voltage is behind the command voltage. After that, the switch S turns on in order to flow the bus current to W-phase (Fig. 15). At this time, the transient state is end and the steady state in W-phase starts. A time chart of the steady state and the transient state is shown in Fig. 16. Fig. 16 shows a time chart of U-phase and W-phase in LIC, the switch S and R statements in VCC, the load current waveform of U-phase and W-phase, the load bus current waveform (IDC), the capacitor current waveform in VCC (IC) and the capacitor voltage waveform in VCC (VC) respectively.
Fig. 13 Current flow in the transient state (regeneration mode)
Fig. 14 Current flow in the transient state (release mode)
Fig. 15 Current flow in the steady state (w-phase)
Fig. 12 Current flow in the steady state (u-phase)
VC
S
R
-
+
-
+
0
Vcref
Idc
VC
S
R
S
R
-
+
-
+
-
+
-
+
0
Vcref
Idc
Fig. 11 Switch R and S logic
1090

IV. SIMULATION RESULTS
The proposed circuit is checked of operation as a CSI and
voltage clamp circuit with MATLAB/Simulink simulation.
In addition, proposed CSI is compared with VSI which uses
the hysteresis control with simulation. The simulation
condition is shown in Table I. In this simulation, the SRM is
1kW, 8 poles and 12 slots. In addition, the SRM model is
made from JMAG-RT model, so this SRM simulation
model is non-linear model. Figs. 18 and 19 show the simulation results of the current
waveforms by the current hysteresis control by using the
VSI and the proposed CSI, respectively.
From Figs. 18 and 19, although unexpected current peak
is obtained in CSI drive because of the inductance variation
with the position of the SRM, the current falling time by the
proposed CSI drive is shorter than that of VSI drive, the
cupper loss is expected to be reduced. However, although
ideal the current falling time is zero second, because CSI is
used, actually, the current falling time is not zero second,
about 400 μsec from Fig. 18. The reason of this time is that,
the free-wheeling current is continued in free-wheeling diodes of asymmetry H bridge inverter. This free-wheeling
mode is shown in Fig. 22. When the switch of asymmetry H
bridge inverter turned off, the current goes to a closed
circuit as shown in Fig. 22. Because of this closed circuit,
current falling time becomes slow. In this mode, the
simulation condition of a firing angle is between 0 degree
and 55 degree of electrical angle. However when the firing
angle is between 0 degree and 60 degree, this means each
phase current is overlapped, the current falling time becomes much slow as shown in Fig. 19. This is also
because of the free-wheeling mode between two phases.
Even when the much slow falling time as shown in Fig. 19,
actually the falling time is under 1 msec, the time is faster
than it by the VSI.
Capacitor voltage and its reference value are shown in Fig.
20. The reference value is 100V and the capacitor voltage is
controlled as 100V. However, the capacitor voltage exceeds
the reference value, it becomes instantly around 120V.
The voltage at drain-to-source of MOSFET in asymmetry
H bridge inverter is shown in Fig. 21. The maximum
voltage of MOSFET is the same with the clamp voltage. So, clamp action is successfully achieved. However, although
the current falling is faster than VSI, the ideal fast current
falling time is not achieved. A countermeasure is under
consideration.
Fig. 17 Load current wave form (VSI)
Fig. 18 Load current wave form (Proposed CSI)(0°~55°)
Table I Simulation conditions
Parameter Proposed CSI VSI Unit
DC Voltage Source 100 V
Command Current 10 A
Rotation speed 500 rpm
Command Voltage 100 V
Capacitor 100 F
Fig.16 Time chart of the steady state and the transient state
1091

V. EXPERIMENTAL RESULTS
In order to verify the proposed circuit phenomenon, some experiments by using 450W 4 poles - 6 slots 4phases SRM
are performed.
A. Results of 4 poles – 6 slots 4 phase SRM drive
Fig. 23 shows the experimental setup of SRM drive
circuit. Fig. 24 shows an experimental circuit diagram of 4
phases SRM by using the proposed CSI. The specification of SRM and the experimental conditions are shown in Table
II.
Some experiment results are shown in Figs. 25- 29. Fig.
25 shows the electrical angle and Fig. 26 shows the rotation
speed. Fig. 27 shows the load current waveforms. Fig. 28
shows the expanded load current wave form. Fig. 29 shows
DC bus current. Fig. 30 shows the switch voltages of the
load inverter circuit. Finally, Fig. 31 shows capacitor
voltage.
From Fig. 27, almost square current wave form is
possible to add to the load. However, the current ripple was
caused at the transient state because SRM changes the inductance. However, the fast current rising and falling
times are realized. Enlarged output current wave form is
shown in Fig. 28. This wave form shows only A phase. Only
A phase is shown in this figure. From Fig. 28, this similar
waveform with the simulation result as shown in Fig. 18 is
obtained. This means that one phase current through another
phase resulting slow current falling time. A current wave
form of current source is shown in Fig. 29. With an ideal
current source, the output current wave form of SRM is
clearly flat wave form. From Fig. 30, it is observed that the
switches voltage of the load inverter circuit is controlled as
the command voltage, this means the voltage spike is reduced. However, the voltage ripples are found in the
transient state. This is because of small parasitic inductance
and/or capacitance and reverse recovery current of diodes.
Capacitor voltage is shown in Fig. 31. The capacitor voltage
is controlled as the reference value which is 30V.
Table II Experimental conditions of SRM drive
Parameter Proposed CSI Unit
Command Current 5 A
DC bus inductance 28 mH
Capacitor 100 F
Command Voltage 40 V
Rotation speed 750 rpm
Maximum Inductance 1630 F
Minimum Inductance 330 F
Resistance 126 m
Poles - Slots 6 - 8 -
Rated voltage 24 VDC
Rated output 450 W
Fig19 Load current wave form (Proposed CSI)(0°~60°)
Fig. 20 capacitor voltage and its reference value
Fig. 21 drain-source voltage (asymmetrical H bridge inverter)
Fig. 22 free-wheel current flow
1092

Fig. 26 Rotation Speed
Fig. 27 Load current wave forms
Fig. 28 Load current wave form (expended)
Fig. 29 DC bus current
AB
CA
B
C
A. SRM
B. Load Inverter circuit
C. Voltage clamp circuit
Fig. 23 Current flow in the steady state (u-phase)
Fig.24 Experimental circuit of 4phase SRM by using the proposed
CSI
Fig. 25 Electrical Angle
1093

VI. CONCLUTION
This paper proposed the SRM driving method with the current source inverter, the induced voltage with fast di/dt
was suppressed by the proposed clamp type current source
inverter. From the study it was confirmed that the proposed
circuit could suppress the voltage by both simulation and
experimental results of SRM driving. However, although
the falling time was faster than it of the voltage source
inverter, the ideal fast di/dt was not realized and there was
an overshoot of the current because the variable inductance
induced the voltage resulting free-wheeling mode. The
countermeasure is still under consideration. However the
fast di/dt will be realized in the nearly future.
VII. REFERENCE
[1] Hiroki Ishikawa, Yoshinobu Kamada, Haruo Naitoh, “Instantaneous
Current Profile Control for Flat Torque Switched Reluctance Motors,” IEEJ Trans. on IA, vol. 125 (2005), No. 12, pp. 1113-1121,
in Japanese.
[2] Khwaja M.Rahman, Suresh Gopalakrishnan, Babak Fahimi, Anandan Velayutham, M.Ehsani “Optimized Torque Control of Switched
Reluctance Motor at All Operational Regimes Using Neural Network,” IEEE Trans. on Industry Applications, vol. 37, No. 3, pp.
904-913. 2001.
[3] Nicholas J. Nagel, Robert D. Lorenz “Rotatig Vector Methods for Smooth Torque Control of Switched Reluctance Motor Drive” IEEE
Trans on Industry Applications, Vol . 36, No. 2, pp. 540-548, 2000.
[4] Iqbal Husian, M.Ehsani “Torque Ripple Minimization in Switched
Reluctance Motor Drives by PWM Current Control,” IEEE Trans on Power Electronics, Vol. 11, No. 1, pp. 83-88, 1996.
[5] Mohammad S. Islam, Iqbal Husain “Torque ripple minimization with indirect position and speed sensing for switched reluctance motors”
IEEE conference IECON, Vol. 3, pp. 1127-1132, 1999
[6] Philip C. Kjaer, Jermy J. Gribble, Timothy J.E. Miller “High-Grade Control of Switched Reluctance Machines” IEEE Trans. on Industry
Applications, Vol. 33, No. 6, pp. 1585-1593, 1997
[7] Hiroki Ishikawa, Daohong Wang, Haruo Naitoh ”A New Swiched Reluctance Motor Drive Circuit for Torque Ripple Reduction”
Conference on PCC Osaka, Vol. 2, pp. 683-688, 2002
[8] Sayeed Mir, Malik Elbuluk, Iqbal Husain “Torque Ripple Minimization in Switched Reluctance Motors Using Adaptive Fuzzy
Control”, IEEE Trans. on Industrial Applications, Vol. 35, No. 2, pp. 461-468, 1999
[9] Gaku Ando, Kan Akatsu “A new SRM drive method by using current
source inverter” International conference on Power Electronics and ECCE Asia, pp. 116-123, 2011.
[10] Mitsuyuki Hombu, Shigeta Ueda, Akiteru Ueda, Yasuo Matsuda “A
new Current Source GTO Inverter with Sinsoidal Output Votage and current”, IEEE Trans. on Industry Applications, Vol. IA-21, No. 5, pp.
1192-1198, 1985
[11] Yong-Ho Chung, Gyu-Hyeong Cho “New Current Source Inverters
with dc-Side Commutation and Load-Side Energy Recovery Circuit” IEEE Trans. on Industry Applications, Vol. 27, No. 1, pp. 52-62,
1991
[12] Gyo H. Cho, Song B. Park “Novel Six-Step and Twelve-Step Current-Source Inverters with DC Side Commutation and Energy
Rebound”, IEEE Trans. on Industry Applications, Vol. IA-17, No. 5, pp. 524-532, 1981
[13] Isao Takahashi, Takehisa Koganezawa, Guijia Su, Kazunobu Ohyama
“A Super High Speed PM Motor Drive.”IEEE, Trans. on Industry Applications, Vol. 30, No. 3, pp. 683-690, 1994
Fig. 30 Switch voltage
Fig. 31 Clamp capacitor voltage
1094