
3DR ArduCopter Quad-C · 3DR ArduCopter Quad-C ... This manual will continue building the vehicle...
18
3DR ArduCopter Quad-C
Transcript of 3DR ArduCopter Quad-C · 3DR ArduCopter Quad-C ... This manual will continue building the vehicle...

3DR ArduCopter Quad-C
3DR ArduCopter Quad-C
Thank you for purchasing a 3DR ArduCopter Quad kit. The 3DR ArduCopter Quad is a stable and supported multi-rotor frame in the ongoing development of the ArduCopter codebase on DIYDrones. It features a very durable Aluminum and G10 FR4 frame that can withstand hard impacts. The wide legged stand allows for more stable takeoffs and landings and provides an unobstructed view for a bottom mounted camera. The 3DR ArduCopter Quad is designed by 3D Robotics in San Diego, California and manufactured in 3D Robotics in Tijuana, Baja California.
Revisions to frame:
Revision B - Adds a removable base for easy access to the PDB and APM mounting slots.
Revision C - Shorter arms. Motor mounting is no longer done with a bolt through the entire arm, but now the motor just mounts to a single face of the arm. Previous mounting method caused the arm to sink in. Added blue arms. Reduced frame weight.

3DR ArduCopter Quad-C Hardware
M3 Rubber Washer .......................................................
M3 Lock Washer ...........................................................
M3 Nylon Nut ................................................................
M3 Metal Nut ................................................................
M3x5mm Plastic Screw ................................................
M3x5mm SS316 Screw ................................................
M3x25mm SS316 Screw ..............................................
M2x30mm SS316 Screw ..............................................
M3x08mm Spacer ........................................................
M3x18mm Spacer ........................................................
M3x30mm Spacer ........................................................
x3

Assembly Guide
Solder Motor and ESC Connectors
Note: You may choose to solder the ESCs directly to the PDB. This will save time on this build and not require you to solder connectors to both the ESCs and the PDB. Soldering connectors however will allow you to easily remove components in the future.
1. Solder all bullet connectors to the motors and ESC. Male connectors go on the motors and female on the ESC. Make sure to heat up both the cable and the connector to avoid a cold solder joint. For a short video demonstrating how to solder bullet connectors follow this link: https://www.youtube.com/watch?v=aEK2e0xUi5s

2. Slide a piece of shrink tubing over the bullet connectors and apply heat to shrink. heat can be applied with a soldering iron or a heat gun. Note: Female connectors should be fully covered by shrink tubing to avoid shorts.
3. Slide two pieces of shrink tubing on the red & black wires on the ESC.
4. Solder male Deans or your preferred connector to the red & black wires on the ESC. Note: Make sure the black wire is soldered to the negative (-) terminal of the connector and the red to the positive (+).
5. Pull the shrink tubing over the exposed connector leads and shrink it.

Choosing + or x
Something to keep in mind during this build is which configuration your vehicle will be flown in. This is later chosen when setting up your APM in the Mission Planner. There is no effect on performance it is just a matter of personal preference. Both the + (Top) and X (Bottom) configurations are pictured above. The blue arms indicate the front of the vehicle. This manual will continue building the vehicle in X configuration. Please adjust accordingly.

Arm Assembly x4
Note: If assembling a quad kit prior to Revision-C and installing 880kv (orange) motors the centered hole on the arm that allows room for the shaft to poke through needs to be drilled out to 10mm.
1. Attach the motor to the arm using two M3x5mm screws (Blue) and two M3 lock washers (Orange) making sure the screws go into the threaded holes in the motor and not the ventilation holes. (If the motor is screwed using the ventilation holes, it will not spin freely) Route the motor cables through the hole on the side of the arm.
2. Use two M3x25mm screws (Green) and two M3 metal nuts (Pink) to fasten the legs to the arm using the indicated holes. To provide rigidity to the legs attach two M3x18mm spacers in between the legs and secure with four M3x5mm metal screws (Blue).
3. Repeat for all 4 arms.


Main Frame Assembly
1. Attach the bottom and top plates to one of the arm assemblies using an M3x30mm screw (Blue) and an M3x25mm screw (Green), secure with two M3 metal nuts (Pink). Note the four screws closer to the center of the vehicle are longer than those on the outside. This 4 longer screws will be used to hold the PDB cap and stack-up assembly.
2. Repeat for the other three arms.
3. Attach four M3x08mm spacers as indicated in the figure above and fasten using four M3x5mm nylon screws (Red).
4. Slide the velcro straps through the two slots on the bottom plate. The velcro straps will be used to fasten the flight battery bellow the vehicle.
5. Slide four rubber washers (Orange) onto the M3x30mm screws (Blue) that stick out of the top plate.

Wiring
1. Connect the three male bullets from the motors to the three bullet connectors on the ESCs.
2. Repeat for all 4 motors.
3. Place the PDB in the center hole of the vehicle as shown in the picture above. and fasten using four plastic M3 nuts. Note: Orient using the arrows on the top face of the PDB.
4. Connect the Deans plugs on the ESCs to the PDB. Note: the order does not matter, this is just so the motors can get power from the battery.
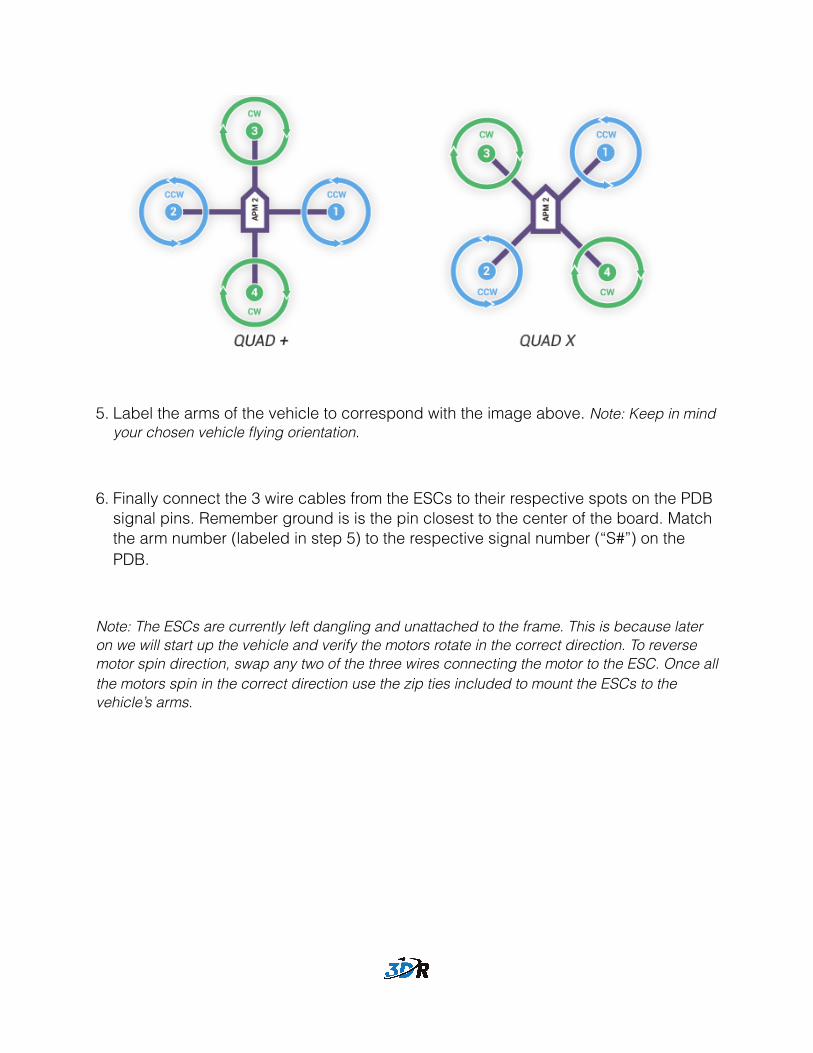
5. Label the arms of the vehicle to correspond with the image above. Note: Keep in mind your chosen vehicle flying orientation.
6. Finally connect the 3 wire cables from the ESCs to their respective spots on the PDB signal pins. Remember ground is is the pin closest to the center of the board. Match the arm number (labeled in step 5) to the respective signal number (“S#”) on the PDB.
Note: The ESCs are currently left dangling and unattached to the frame. This is because later on we will start up the vehicle and verify the motors rotate in the correct direction. To reverse motor spin direction, swap any two of the three wires connecting the motor to the ESC. Once all the motors spin in the correct direction use the zip ties included to mount the ESCs to the vehicle’s arms.

Mounting your APM
APM can be mounted using double sided tape (3M Scotch Exterior Mounting Tape is recommended) or it can be bolted to the carrier plate. The series of slots on the carrier plate allow your APM to be bolted in both + and X configurations. Note: In + mode the front of the APM should face arm 3. In X mode the front should be between arms 3 and 1.

Connect the four-wire cable from the power distribution board (PDB) to the APM output signal pins (top row of OUTPUTS pins labelled “S” as shown below). This cable allows the APM to send controls to the motors, so the cable must be oriented in the same way on both the APM and PDB. Ensure that the wire originating in the M1 position on the PDB connects to the output signal pin labeled 1 on the APM.
Connecting motor controls
The image above shows the green M1 wire connected to the 1 output pin and the yellow M4 wire connected to the 4 output pin. The color coding on your board may differ from the cable shown above, so make sure to verify that the numbers match up correctly.
PDB wire numbers
APM output pin numbers

Assembling the stack-up
1. Place the APM carrier plate with the front of your APM pointing in between the blue arms (for X mode) onto the four M3x30mm screws sticking out of the top plate.
2. Secure the APM carrier plate with four M3x30mm nylon spacers.

3. Place a stack-up plate on top of the M3X30mm spacers and secure using four M3x18mm spacers.
4. Place a second stack-up plate on top of the M3x18mm spacers and secure using four M3x5mm nylon screws.

Attaching Propellers
To attach the propellers use the collets included. Cut the plastic ring included with the propellers that fits snug around the threaded collet and insert it into the slot in the back of the propeller. Place the collet on the motor shaft and tighten to keep the propeller in place. Make sure the writing on the propeller is facing up. Refer to the diagram above for correct prop rotation direction. Note: It is recommended that you balance your propellers prior to installing.

We hope you enjoy your 3DR ArduCopter Quad. If you have any questions or concerns please feel free to contact us via email at :
For additional information on how to set up your 3DR ArduCopter Quad and more information on the ArduCopter codebase please visit the ArduCopter wiki at:
http://code.google.com/p/arducopter
and
www.diydrones.com


















