3D Time of Flight Camera

of 38
-
Upload
keshav-gutsy -
Category
Documents
-
view
225 -
download
0
Transcript of 3D Time of Flight Camera
-
7/31/2019 3D Time of Flight Camera
1/38
1
INDEX
1) Abstract 2) Introduction .....3) Purpose4) Scope5) Overall Description
5.1) Concept.. 5.2) Principle. 5.3) Components Of TOF camera5.4) Working
5.5) Faults In TOF camera.
5.6) Practical Use
5.7) Technologies Developed5.8) Advantages
5.9) Short Comings5.10) Applications
6) Conclusion 7) Bibliography
-
7/31/2019 3D Time of Flight Camera
2/38
-
7/31/2019 3D Time of Flight Camera
3/38
3
new device, its problems and possibilities for its practical application.
INTRODUCTION
What is Time Of Flight?
Time of flight (TOF) describes a variety of methods that measure the time
that it takes for an object, particle or acoustic, electromagnetic or other wave to
travel a distance through a medium. This measurement can be used for a time
standard (such as an atomic fountain), as a way to measure velocity or path length
through a given medium, or as a way to learn about the particle or medium (such as
composition or flow rate). The traveling object may be detected directly (e.g., ion
detector in mass spectrometry) or indirectly (e.g., light scattered from an object in
laser doppler velocimetry).
Time-of-flight cameras are relatively new devices, as the semiconductor
processes have only recently become fast enough for such devices. The systems
cover ranges of a few meters up to about 60 m. The distance resolution is about
1 cm. The lateral resolution of time-of-flight cameras is generally low compared to
standard video cameras, at 320 240 pixels or less. Only one camera reports 484 x
648 pixels of resolution using a standard CCD sensor.The biggest advantage of the
cameras may be that they provide up to 100 images per second.
-
7/31/2019 3D Time of Flight Camera
4/38
4
Why to use a 3-D TOF camera?
When using a 3D-camera three specific reference values are of increased interest:
the accuracy of coordinates, the resolutionof the recording chip (number of pixels) the maximumrange procurable.
With the development of the latest generation of 3D-cameras, much progress has
been made in regard to thesethree items:
accuracy is now in the range of a few centimetres, resolution goes up to 40k pixels the maximum distance wasraised to about 20m.
In light of these developments the question , whether the 3D-camera may be usedas an instrument for surveying and recording is worth investigating. This may be
done by extrapolating from the technical specifications of currently available 3D-
cameras into the near future, which will most certainly bring higher resolution,
increased accuracy and an expanded maximum distance. Further developments of
this kind will be realised soon as prospective customers exist in the field of
robotics, vehicle construction and many more areas.
The main questions are as follows:
1. Are there any fundamental problems in the process of recording architecture?
2. Which new possibilities for recording of geometry and for visualisation
purposes arise for practical work?
-
7/31/2019 3D Time of Flight Camera
5/38
5
3. Is the proposed 2D- / 3D-system capable to replace current devices?
PURPOSE
Today, is world of technology. None of the technologies available in any field at
present is complete in itself. The scientists are continuously trying to develop new
one which would be better than the present one.
The 2-D camera has been used for developing pictures, video recording, graphics
modulation, and in many applications for many decades, but now a 3-D time of
flight technology has been developed. A traditional camera delivers a two-
dimensional image of the surrounding world. The 3D-time-of-flight camera (ToF) -
which was developed in the last decade - captures not only two, but three
dimensions in one step by measuring the distance from each pixel of the camera
chip to the object. This way a large number of coordinates is determined for each
exposurea so called frame.
The 3-D time of flight technology is quiet sufficient in producing efficient image
than a 2-D technology. The target source is illuminated using infra red light (
generally), the reflected light is gathered by the image sensor and a cloud of pixels
is generated, each point corresponds to every exposed part of the object.
-
7/31/2019 3D Time of Flight Camera
6/38
6
The main advantage of using this technology is the speed it provides. Time-of-
flight cameras are relatively new devices, as the semiconductor processes have
only recently become fast enough for such devices. The systems cover ranges of a
few meters up to about 60 m. The distance resolution is about 1 cm. The lateral
resolution of time-of-flight cameras is generally low compared to standard video
cameras, at 320 240 pixels or less. Only one camera reports 484 x 648 pixels of
resolution using a standard CCD sensor. The biggest advantage of the cameras may
be that they provide up to 100 images per second.
Another main feature of TOF camera is that it is quiet simple to use them. As the
whole system is very compact, the illumination is placed just next to the lens, and
no mechanical moving parts are needed.
The 3-D TOF camera provides a better algorithm to calculate distance between
object and the light source. Therefore, this task uses only a small amount of
processing power, again in contrast to stereo vision, where complex correlation
algorithms have to be implemented. After the distance data has been extracted,
object detection, for example, is also easy to carry out because the algorithms are
not disturbed by patterns on theobject.
So, 3-D time of flight technology has a great advantage over the traditional 2-D
technology in image generation and it will be quiet useful in upcoming days.
-
7/31/2019 3D Time of Flight Camera
7/38
7
SCOPE
Due to fast speed and simplicity of 3-D time of flight technology, it has become
very popular in many fields. Various technologies using 3-D TOF technology:
Automotive applications
Time-of-flight cameras are also used in assistance and safety functions for
advanced automotive applications such as active pedestrian safety, precrash
detection and indoor applications like out-of-position (OOP) detection.
Human-machine interfaces / gaming
As time-of-flight cameras provide distance images in real time, it is easy to track
movements of humans. This allows new interactions with consumer devices such
as televisions. Another topic is to use this type of cameras to interact with games
on video game consoles.
Measurement / machine vision
Other applications are measurement tasks, e.g. for the fill height in silos. In
industrial machine vision, the time-of-flight camera helps to classify objects and
help robots find the items, for instance on a conveyor. Door controls can
distinguish easily between animals and humans reaching the door.
-
7/31/2019 3D Time of Flight Camera
8/38
8
Robotics
Another use of these cameras is the field of robotics: Mobile robots can build up a
map of their surroundings very quickly, enabling them to avoid obstacles or follow
a leading person. As the distance calculation is simple, only little computational
power is used.
-
7/31/2019 3D Time of Flight Camera
9/38
9
OVERALL DESCRIPTION
1)Concept of Time Of Flight
Time-of-Flight (ToF) sensors provide a direct way for acquiring 3D surface
information of objects. More recently, applications like gesture recognition or
automotive passenger classification are using ToF sensors and ToF is on its way
to become a component of consumer electronics.
As ToF sensors provide data at rates higher than 15 Hz, they are suitable for
real-time 3D imaging and can also be used as an additional imaging modality in
medicine. We are convinced that ToF technology can contribute to enhance
applications within medicine and suggest several applications within this field.
Time-of-flight cameras are relatively new devices, as the semiconductor
processes have only recently become fast enough for such devices. The systems
cover ranges of a few meters up to about 60 m. The distance resolution is about
1 cm. The lateral resolution of time-of-flight cameras is generally low compared
to standard video cameras, at 320 240 pixels or less.Only one camera reports
484 x 648 pixels of resolution using a standard CCD sensor. The biggest
advantage of the cameras may be that they provide up to 100 images per second.
-
7/31/2019 3D Time of Flight Camera
10/38
10
2) Time Of Flight Principal
A Time of flight camera (TOF camera) is a camera system that creates
distance data with help of the following principle:
Time of flight Principle (TOF) describes a variety of methods that measure the
time that it takes for an object, particle or acoustic, electromagnetic or other wave
to travel a distance through a medium. This measurement can be used for a time
standard, as a way to measure velocity or path length through a given medium, or
as a way to learn about the particle or medium. The traveling object may be
detected directly or indirectly.
The 3D Time-Of-Flight (ToF) camera, simultaneously delivers gray-levelimages and 3D information of the scene.
Illumination source is in the form of matrix of LEDs. On the basis of reflected ray:
Distance Image (D(i, j)) is computed based on the phase shift between theemitted and reflected signals,
Amplitude Image (A(i, j)) is estimated based on the amplitude of thereflected signal at every pixel location.
-
7/31/2019 3D Time of Flight Camera
11/38
11
3) Components Of Time Of Flight camera
A time-of-flight camera consists of the following components:
Illumination unit: It illuminates the scene. As the light has to be modulatedwith high speeds up to 100 MHz, only LEDs or laser diodes are feasible.
The illumination normally uses infrared light to make the illumination
unobtrusive.
Optics: A lens gathers the reflected light and images the environment ontothe image sensor. An optical band pass filter only passes the light with the
same wavelength as the illumination unit. This helps suppress background
light.
Image sensor: This is the heart of the TOF camera. Each pixel measures thetime the light has taken to travel from the illumination unit to the object and
back. Several different approaches are used for timing; see types of devices
above. Driver electronics: Both the illumination unit and the image sensor have to
be controlled by high speed signals. These signals have to be very accurate
to obtain a high resolution. For example, if the signals between the
illumination unit and the sensor shift by only 10 picoseconds, the distance
changes by 1.5 mm. For comparison: current CPUs reach frequencies of up
to 3 GHz, corresponding to clock cycles of about 300 ps - the corresponding
'resolution' is only 45 mm.
Computation/Interface: The distance is calculated directly in the camera.To obtain good performance, some calibration data is also used. The camera
then provides a distance image over a USB or Ethernet interface.
-
7/31/2019 3D Time of Flight Camera
12/38
12
4) Working of TOF camera
The simplest version of a time-of-flight camera uses light pulses. The
illumination is switched on for a very short time; the resulting light pulse
illuminates the scene and is reflected by the objects. The camera lens gathers the
reflected light and images it onto the sensor plane. Depending on the distance, the
incoming light experiences a delay. As light has a speed of c = 300,000,000 meters
per second, this delay is very short: an object 2.5 m away will delay the light by:
The pulse width of the illumination determines the maximum range the
camera can handle. With a pulse width of e.g. 50 ns, the range is limited to
These short times show that the illumination unit is a critical part of the
system. Only with some special LEDs or lasers is it possible to generate such short
pulses.
The single pixel consists of a photo sensitive element (e.g. a photo diode). It
converts the incoming light into a current. In analog timing imagers, connected tothe photo diode are fast switches, which direct the current to one of two (or
several) memory elements (e.g. a capacitor) that act as summation elements. In
digital timing imagers, a time counter, running at several gigahertz, is connected to
each photo detector pixel and stops counting when light is sensed.
-
7/31/2019 3D Time of Flight Camera
13/38
13
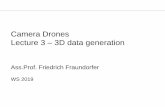
In the diagram of an analog timer (given below), the pixel uses two switches
(G1 and G2) and two memory elements (S1 and S2). The switches are controlled
by a pulse with the same length as the light pulse, where the control signal of
switch G2 is delayed by exactly the pulse width. Depending on the delay, only part
of the light pulse is sampled through G1 in S1, the other part is stored in S2.
Depending on the distance, the ratio between S1 and S2 changes as depicted in the
drawing. Because only small amounts of light hit the sensor within 50 ns, not only
one but several thousands pulses are sent out (repetition rate tR) and gathered,
-
7/31/2019 3D Time of Flight Camera
14/38
14
thus increasing the signal to noise ratio.
After the exposure, the pixel is read out and the following stages measure
the signals S1 and S2. As the length of the light pulse is defined, the distance can
be calculated with Medina's formula:
In the example, the signals have the following values: S1 = 0.66 und S2 =
0.33. The distance is therefore:
In the presence of background light, the memory elements receive an
additional part of the signal. This would disturb the distance measurement. To
eliminate the background part of the signal, the whole measurement can be
performed a second time with the illumination switched off. If the objects are
further away than the distance range, the result is also wrong. Here, a second
measurement with the control signals delayed by an additional pulse width helps to
suppress such objects. Other systems work with a sinusoidally modulated light
source instead of the pulse source.
Different denotations exist as far as 3D-cameras are concerned:
The TOF-camera, The PMD-camera The range imaging camera (RIM or flash radar camera)
-
7/31/2019 3D Time of Flight Camera
15/38
15
They are all targeted at the same type of camera, which is capable of not
only detecting intensity like traditional analogue or modern digital cameras, but
also the distance of each pixel to the mapped part of the object. A more precise
description for the term range imaging camera is the term ToF (TOF)-camera -
indicating that an - optical - signal that has been emitted from the camera is
reflected from the object, and also indicating that the reflected part of the emitted
signal is then returned to the camera.
The flight-time of the signal on its way to the object and back is measured.
The ToF is proportional to the distance. However, this is only a very general
explanation of electronic distance measurement (EDM). Often a modified method
(phase modulation) is used that relies on the modulation of the signal strength (the
amplitude of the emitted light).
-
7/31/2019 3D Time of Flight Camera
16/38
16
The wavelength of one modulation period depends on the modulation
frequency f. It is calculated with theactual - velocity of light c according to
Wavelength = C/F. Most 3D-cameras emit IR-light modulated with f = 20 MHz. In
the example, the corresponding wavelength of 15m (15m = 300000km/s / 20
x 106/s) is reflected at a distance of about 22m. As the light passes to the object
and back it runs the double distance, so the result needs to be divided by two.
The so-called scale of the distance meter is 15m/2 = 7,5m. The whole
distance is d = (n x wavelength + phase), where n is the even multiple of
wavelength , and phase is the rest of the wavelength which has to be measured, the
so called phase difference between the emitted and the returned signal. Thus it
follows that when a single modulation frequency is utilized, a direct distinct
measurement is possible only up to 7.5m. So a distance of 8.05m would show as
0.55m.
This is a general description how distances can be measured by means of an
amplitude modulated signal. The phase measurementthe determination of . - may
be done in different ways. In a 3D-camera it is done using the PMD-effect
(Photonic-Mixer-Device (Schwarte)). In this case phase is represented by the
difference in charge of two photo-sensitive areas of each respective pixel. Daylight
may cause an overload of one of these areas.
This may cause serious errors in the distance measured by a ToF-PMD
camera, making daylight suppression a fundamental requirement for any 3D-
camera to be used for surveying.
-
7/31/2019 3D Time of Flight Camera
17/38
17
Above figure shows the difference of images obtained from 2-D & 3-D
camera. It can be shown clearly that images obtained from 3-D camera are of high
resolution than 2-D camera. 2-D camera produces redundant data which makes the
image blurred and the image produced is of low resolution.
Some General Remark
In order to answer the aforementioned main questions it has not been
necessary to utilize the very latest generation of 3Dcameras. However, the device
used for testing needed to meet some minimum requirements, which are sufficient
short-term temperature-stability as well as adequate daylight suppression. Due to
its high performance in the latter area a 3k camera of PMD-technologies ( Siegen,
Germany) was selected. This model, however, is soon to be succeeded by the
camera 2.0 (41k). Figure 1 shows 2.0 - currently being the camera with the highest
pixel-resolution available - 205 x 205 pixels - as well as the model PMD 3k with a
2D-colour-camera placed on top.
-
7/31/2019 3D Time of Flight Camera
18/38
18
Figure a: 3D-camera 2.0, 41k (PMD-Technologies)
Figure b: 3D-camera 3k (PMD-Technologies) mounted with 2D-camera
On both sides of the 3D-camera's cubes diode arrays are mounted emitting
an amplitude-modulated IR-light that illuminates the whole scene to be captured.
Apart from the distances (resp. coordinates) and the grey-values (intensities)
the signal-amplitudes of the returned signals are registered for each pixel as well.
Additionally, the 2D- / 3D-camera system of Bochum University delivers a colour-
image with higher resolution. The lateral positions of the pixels on the chip of the
3D-camera and of the colour-camera respectively present polar coordinates
together with the distances. They allow the calculation of orthogonal coordinates
of the object.
-
7/31/2019 3D Time of Flight Camera
19/38
19
5) Typical Faults Of TOF Camera
The emitted light illuminates the whole 3D-scene at once. This is a very
important difference to common electronic distance measurement (EDM). At EDM
the distance measuring ray is precisely focused. The emitted signal amplitude is
D (t0) = Acos wt(0). The remitted light signal comprises the distance information
in terms of a phase delay of the emitted signal: d(t) = k + a cos (wt + phase). The
phase delay contains the distance information. The remitted signal amplitude a is
generally much smaller than the sent amplitude A. Additionally, the returning
signal may be superimposed with a term k which contains various very different
kinds of influences on the signal, like, for instance, a delay that might be caused by
daylight or by temperature effects.
In order to understand the difficulties concerning the application of 3D-
cameras for architectural recording it is necessary to take a closer look at the
instruments faults. Most faults are well-known either from the field of
photogrammetry e.g. distortion of pictures or from electronic distance
measurement (EDM) - like phase shifts caused by optical or electrical
superimposition of the direct signal with error signals (crosstalk). Most of the
faults of 3DPMD- cameras can be sufficiently modelled in a calibration process.
Certain errors may also be suppressed, e.g. daylight via the SBIcircuit
(Suppression of Background Light Intensity). The short time random inaccuracy of
neighboring pixels may nowadays be estimated to generally not exceeding 1cm
in a distance-range of some meters. However, two fundamental influences on the
-
7/31/2019 3D Time of Flight Camera
20/38
20
distances have a systematic nature. They can considerably compromise the general
accuracy. Both are resulting from unwelcome reflections of the distance measuring
signals.
The first influence may be characterized as internalsuperimposition, the
second as external superimposition. Superimposition in general terms means that
the periodic amplitude modulated signal, which is characterized by frequency,
amplitude and phase , is superimposed by a signal of the same frequency, but with
another phase and generally much lower amplitude.
By this process the resulting signal may deviate significantly from the
undisturbed one in regards to phase. The amount of the phase shift depends on the
phase difference between both signals as well as on the ratio of the amplitudes of
the signals as in the following figure:
Signal a with phase p is superimposed by a small reflected- signal b with
phase p'. Resulting is a signal with phase p + t. The influence of b depends on its
individual phase. A phase shift is equivalent to an error in distance. The grave
influence of internal and external superimposition respectively on distances
-
7/31/2019 3D Time of Flight Camera
21/38
21
measured with the 3D-camera has to be regarded in more detail in order to access
the possibilities to use the tool for architectural recording. Internal superimposition
effecting distance shadows that encircle the foreground like a small ribbon.
In literature internal superimposition is also characterised as scattering:
Small parts of incoming signals are reflected in the camera itself, overlaying the
directly reflected incoming signals on their way to the pixel. Thus the stronger
direct signal is changed in phase by the reflected parts belonging to neighbouring
pixels. Scattering predominantly effects neighboring pixels with very different
phases . As the lens of the camera has to be focused to a fixed distance, e.g. 5m,
the blurring effect favours scattering at distances which are shorter or longer than
the one the camera is focused on. However, efforts and advances made by the
manufacturers in order to minimize the influence of scattering raise hope that
scattering will be overcome in the future. Mathematical models also help to
minimize it (Mure-Dubois, 2007).
External superimposition seems to be the most dangerous error. It might
very well ultimately prove to fundamentally limit the possibilities to use 3D-
cameras for architectural recording. The reason for the occurrence of this effect lies
in the fact that the array of diodes emitting the IR-Signal always illuminates the
whole scene all at once. Small parts of diffusely reflected light from different parts
of the object may superimpose the directly reflected signals on their way back to
the camera. The possible influence of diffuse reflections on a wall, causing a phase
shift of a directly reflected signal, can be depicted only schematically as in
following figures:
-
7/31/2019 3D Time of Flight Camera
22/38
22
Possible influence of diffuse reflection on direct measurement
External superimposition effecting a phase delay, respectively a distance shift
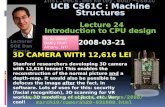
The impact of the effect is demonstrated in following figure. Appropriate
measurements were made to a vertical edge, formed by two flexible planes. In the
experiment the angle between the planes was modified while the position of the
edge itself did not move. The smaller the angle between the planes, the more
deformed the edge will appear. However, the distances measured more or less
exactly into the centre of the corner, into the intersection of the planes, are those
which are less deformed by the superimposition. The amount of error thus may
reach considerable amounts.
-
7/31/2019 3D Time of Flight Camera
23/38
23
Interaction between topography of the architecture
and the measurement with a)d) increasing deformation withsmaller angle; e),f) same angle but f) one plane less reflecting
The topography of an area can also mean the surface shape and features
themselves or in a broader sense, topography is concerned with local detail in
general. Here the feature and shapes of the reflecting surfaces are concerned,
showing changes occurred in images as the position of the surfaces is changed. It
can be easily observed that as the angle between the planes decreases the image
gets more deformed keeping the position of edges constant.
-
7/31/2019 3D Time of Flight Camera
24/38
24
6) Practical Use Of TOF Camera
The examples prove the wide range of possibilities inherent in the new
methodology, which can be applied to a variety of tasks that currently require
several different measuring devices, like the electronic-distance-meter,
tacheometer, laserscanner or camera. The possibilities of the new system are
demonstrated in regards to distance-measurement, angle-measurement, taking
images, measuring point clouds or using it like a video-camera at a high frame
rate. The 2D- / 3D-system has all the fundamental capabilities of common
contemporary measuring devices. Will it be possible to discard these instruments
in favour of the 3D-camera in the future? Will it be possible to use it efficiently
despite the handicap provided by external superimposition? The following
experiments try to find some answers.
User interface of the 2D- / 3D-system
-
7/31/2019 3D Time of Flight Camera
25/38
25
The 2D- / 3D-system in exchange to a tacheometer
With the tacheometer polar coordinates are measured in reference to the
vertical: the zenith distance, the horizontal angle and the distance. In architectural
surveying it is often used to establish a network or to capture single points.
Whether the 3D-camera can replace a tacheometer is largely dependent on the
orientation of the camera and on its accuracy. To prove this, the 2D- / 3D-camera-
system was mounted on a tacheometer tripod and leveled with a bubble-tube. The
3D camera was used for distance measurement, the 2D-camera for angle
measurement because of its higher angle resolution. Different types of special
targets were developed. E.g. in various sectors rods were marked with reflecting
film or reflecting spheres.
Targets for automatic identification of single points
Although the cameras angle resolution is rather poor, distances could still
be detected sufficiently well, especially as far as measurements to spherical-
reflectors are concerned. In order to carry out angle-measurement well-defined
points in the same line e.g. the reflecting spheres could be chosen automatically.
Thus automated extraction and identification of reflecting points of high intensity
was possible. Distances of more than 20m were reached, however with rapidly
decreasing accuracy down to + 5cm. Faults caused by excessive intensity of the
signal amplitude at the reflecting points had to be considered. If necessary, these
strongly reflecting points can be used for identification purposes only, while less
-
7/31/2019 3D Time of Flight Camera
26/38
26
reflecting adjacent (red) spheres may be utilized for angle measurement
respectively for distance measurement. The latest generation cameras, however,
should yield better results. It will also be easier to measure distances longer than
half a wavelength, because increased switching times of the measuring frequency
make it possible to determine n in the equation d = (n x + .) using different
frequencies. The present means of interaction using a measuring rod is a typical
modus operandi of the 3D-camera. It cannot be realized with other instruments this
way. Only here different targets can be reached all at once. The eventual
replacement of the tacheometer by the 3D-camera seems a likely future course for
certain areas, e.g. for documenting the advancing process of measurements at an
archaeological excavation site, or for topographical purposes at short distances. In
these applications of measurements to reflecting targets faults caused by external
superimposition may be sufficiently suppressed. It has also been proved that a
network can easily be referenced by moving a GPS-antenna across the field of
sight with the camera positioned on a tripod. Single-frame exposure time and
GPS-coordinate measurement were synced.
Scanning with the 3D-camera
With the 3D-system being used as a scanner special attention should be paid to two
different working modes: In the first one, the camera is mounted on a tripod to be
turned around a fixed e.g. vertical - axis, whereas in the second one the camera
may be moved freely around an object or moved about in a room. In both cases
every single frame delivers a cloud of thousands of points that are fixed to the
-
7/31/2019 3D Time of Flight Camera
27/38
27
camera system. In either of the two modes good starting points for matching are
obtained by the procedurethanks to the high frame rate and the frames
overlapping heavily. However, external superimposition may cause considerable
deformations and will deteriorate the quality of matched point-clouds in any case.
To minimize the influence the point-clouds of structures scanned with the 3D-
system should preferably only be neighboring small reflecting areas. Figure gives
an example of a suitable object. The point cloud was constructed from 50 frames,
taken from only three positions with the camera on a tripod. This unfavourable
way of recording can easily be identified by the characteristic structure of points
forming rows.
-
7/31/2019 3D Time of Flight Camera
28/38
28
Visualization
Photorealistic texturing requires geometry data and pre-rectified images. The
images used for photorealistic modeling were taken with the 2D-camera and
matched with the coordinates taken by the 3D-camera. Mapping and rectifying of
the images was done here using the technology and the algorithms of photo
tacheometry (Scherer, 2006). Figure shows an image of a three-dimensional work
of art consisting of coloured planes facing each other in different angles. In this
example no effects by external superimposition on the coordinates were to be
expected. Changes in colour result from to the lower quality of the 2D video
camera.
In the visualization of built structures the level of detail (LOD) is
characterized by four degrees. LOD3 describes models of buildings that have been
texturized on the outside. In these cases the general geometry recording resolution
goes down to a few decimeters. LOD4 is reserved to describe the most detailed
models, the interior of buildings as well as detailed textures. The visualization of
the niche in example figure 12 shows that - in spite of superimposition-effects -
planes can be extracted sufficiently well to build a LOD3-model.
-
7/31/2019 3D Time of Flight Camera
29/38
29
7) Technologies Developed for Time Of Flight Camera
Several different technologies for time-of-flight cameras have been developed.
Pulsed light source with digital time counters
There are devices with a pulsed laser and a custom imaging integrated
circuit with a fast counter behind every pixel. These devices produce depth values
for each pixel on every frame. Typical image sizes are 128 x 128 pixels. Ranges up
to 22,000 feet with an eye-safe narrow beam have been achieved. Detectors are
typically InGaAs (indium-gallium-arsenide) devices.
RF-modulated light sources with phase detectors
Photonic Mixer Devices (PMD) and the Swiss Ranger works by modulating
the outgoing beam with an RF carrier, then measuring the phase shift of that carrier
on the receive side. This is a compact, short-range device. This approach has a
modular error challenge; ranges are mod the maximum range, which is the RF
carrier wavelength. With phase unwrapping algorithms, the maximum uniqueness
range can be increased. The Swiss Ranger has ranges of 5 or 10 meters, with 176 x
144 pixels. The PMD can provide ranges up to 60m. Illumination is pulsed LEDs,
rather than a laser. The demodulation is usually achieved by gating the sensor in
synchrony with the light source modulation, so in essence they are range gated
imagers.
-
7/31/2019 3D Time of Flight Camera
30/38
30
Range gated imagers
This is the most promising technology, invented by Antonio Medina. The
phase detector is the gate or shutter in the camera. The gate allows collection of
portions S2 and S1 of the received light pulse S. The portions are dependent of the
time of arrival, and range is derived from them according to Medina's equation, z
=R(S2-S1)/2S+R/2 for an ideal camera. R is the camera range, determined by the
round trip of the light pulse. The Z-cam and Canesta 3D cameras are range-gated
systems.
Similar principle is used in the ToF camera line developed by FraunhoferInstitute of Microelectronic Circuits and Systems and TriDiCam. These cameras
employ photo detectors with fast electronic shutter used as a gated integrator and
pulsed lasers.
There are also "range gated imagers", which are not 3D cameras. The gate is
open to collect the totality of the reflected pulse and nothing else. Anything outside
a specified distance range can be suppressed. Those are useful for seeing through
fog. A pulsed laser provides illumination, and an optical gate allows light to reach
the imager only during the desired time period.
-
7/31/2019 3D Time of Flight Camera
31/38
31
8) Advantages of Time Of Flight Camera
Simplicity
In contrast to stereo vision or triangulation systems, the whole system is very
compact: the illumination is placed just next to the lens, whereas the other systems
need a certain minimum base line. In contrast to laser scanning systems, no
mechanical moving parts are needed.
Efficient distance algorithm
It is very easy to extract the distance information out of the output signals of
the TOF sensor, therefore this task uses only a small amount of processing power,
again in contrast to stereo vision, where complex correlation algorithms have to be
implemented. After the distance data has been extracted, object detection, for
example, is also easy to carry out because the algorithms are not disturbed by
patterns on the object.
Speed
Time-of-flight cameras are able to measure the distances within a complete
scene with one shot. As the cameras reach up to 100 frames per second, they are
ideally suited to be used in real-time applications.
-
7/31/2019 3D Time of Flight Camera
32/38
32
9) Shortcomings in Time Of Flight Camera
Background light
Although most of the background light coming from artificial lighting or the
sun is suppressed, the pixel still has to provide a high dynamic range. The
background light also generates electrons, which have to be stored. For example,
the illumination units in today's TOF cameras can provide an illumination level of
about 1 watt. The Sun has an illumination power of about 50 watts per squaremeter after the optical bandpass filter. Therefore, if the illuminated scene has a size
of 1 square meter, the light from the sun is 50 times stronger than the modulated
signal.
Interference
If several time-of-flight cameras are running at the same time, the cameras may
disturb each others' measurements. There exist several possibilities for dealing with
this problem:
Time multiplexing: A control system starts the measurement of theindividual cameras consecutively, so that only one illumination unit is active
at a time.
Different modulation frequencies: If the cameras modulate their light withdifferent modulation frequencies, their light is collected in the other systems
only as background illumination but does not disturb the distance
measurement.
-
7/31/2019 3D Time of Flight Camera
33/38
33
Multiple reflections
In contrast to laser scanning systems, where only a single point is
illuminated at once, the time-of-flight cameras illuminate a whole scene. Due to
multiple reflections, the light may reach the objects along several paths and
therefore, the measured distance may be greater than the true distance.
-
7/31/2019 3D Time of Flight Camera
34/38
34
10) Applications Of TOF Camera
Automotive applications
Time-of-flight cameras are also used in assistance and safety functions for
advanced automotive applications such as active pedestrian safety, precrash
detection and indoor applications like out-of-position (OOP) detection.
Human-machine interfaces / gaming
As time-of-flight cameras provide distance images in real time, it is easy to track
movements of humans. This allows new interactions with consumer devices such
as televisions. Another topic is to use this type of cameras to interact with games
on video game consoles.
-
7/31/2019 3D Time of Flight Camera
35/38
35
Measurement / machine vision
Other applications are measurement tasks, e.g. for the fill height in silos. In
industrial machine vision, the time-of-flight camera helps to classify objects and
help robots find the items, for instance on a conveyor. Door controls can
distinguish easily between animals and humans reaching the door.
Robotics
Another use of these cameras is the field of robotics: Mobile robots can build up a
map of their surroundings very quickly, enabling them to avoid obstacles or follow
a leading person. As the distance calculation is simple, only little computational
power is used.
http://en.wikipedia.org/wiki/File:TOF_Kamera_Boxen.jpghttp://en.wikipedia.org/wiki/File:TOF_Kamera_Boxen.jpghttp://en.wikipedia.org/wiki/File:TOF_Kamera_Boxen.jpghttp://en.wikipedia.org/wiki/File:TOF_Kamera_Boxen.jpg -
7/31/2019 3D Time of Flight Camera
36/38
36
CONCLUSION
On the one side, fundamental difficulties using 3D-cameras for architecturalsurveying are to be outlined, and on the other side possibilities for the use of a
2D- / 3D-system replacing traditional measuring instruments are to be shown.
The most important results from these first experiences are as follows:
- When modelling structures the geometrical accuracy depends on the structures
themselves and on the geometrical relation between the camera and the object. The
strong interdependence caused by external superimposition has to be taken into
account.
- Geometrical correctness can often not be guaranteed.
- A sufficient resolution of point-clouds can be reached only with a large number
of frames; the most efficient way to arrange them will have to be examined.
- The aforementioned method of recording with the 3D-camera is suited for
recording and visualization with LOD3-quality.
- The combination of a 3D-camera with a 2D-camera of higher resolution yields
improved coordinate quality.
-
7/31/2019 3D Time of Flight Camera
37/38
37
- The large variety of possibilities to combine the different functionalities may
allow to replace traditional measuring instruments and measuring methods under
certain conditions.
Although many instrumental parameters will see additional improvements in
the future, the external superimposition error is inherent in the technology itself. It
may cause uncontrollable alterations in the distances measured. Determining
accurate boundaries for widespread and common use of 3D-cameras in surveying
might prove to be a long way.
-
7/31/2019 3D Time of Flight Camera
38/38
BIBLIOGRAPHY
www.wikipedia.org/wiki www5.informatik.uni-erlangen.de/.../time-of-flight-tof-group www.mesa-imaging.ch/pdf/Application_SR3000_v1_1.pdf www.artts.eu/publications/oprisescu_et_al_ieee.pdf www.springerlink.com/index www.cs.unc.edu/~lguan/publications/guan_pollefeys_eccv08.pdf