3.5 ACD Series - Amazon Web Services
5
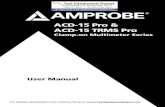
62.0 51.0 12.0 THRU 12.0 H7 7.0 7.5 4.0 4× 4.5THRU 5 ×M3 5.0 Equally spaced on PCD 20.0 Standard cable length= 3.0m - Motor cable = 6.0 - Hall cable = 3.8 - Encoder cable = 4.0 60.0±0.15 1.0 34.0-0.05 0.00 62.0 11.7 0.012 A 0.010 A B 0 0.1 0.2 0.3 0.4 0.5 0 200 400 600 800 1000 1200 1400 Torque (Nm) Speed (rpm) Torque Speed Curve ACD62-60 Detla Connection DC Bus Voltage 48V Continuous Torque Peak Torque 0 0.1 0.2 0.3 0.4 0.5 0 200 400 600 800 1000 1200 1400 Torque (Nm) Speed (rpm) Torque Speed Curve ACD62-60 Star Connection DC Bus Voltage 48V Continuous Torque Peak Torque SERIES ACD Dimension Torque-Speed Curve ACD Series ACD62-60 Other Information Encoder Parameters ABI Optical Incremental Encoder (SIN/COS) ABI Optical Incremental Encoder (80x) ABI Optical Incremental Encoder (160x) ABI Optical Incremental Encoder (400x) Repeatability Max. Moment Load (Inverted / Wall Mounting) Max. Moment Load (Upright Mounting) Max. Axial Load (Inverted / Wall Mounting) Max. Axial Load (Upright Mounting) Radial Runout Axial Runout Insulation Class Protection Grade Ambient Temperature Ambient Humidity Recommended Ambience Accuracy after Error Mapping Compliance with Global Standards lines / rev counts / rev counts / rev counts / rev arc sec arc sec Operation Storage Operation Storage Class B (130ºC) IP40 RoHS, CE 0ºC to 40ºC (non-freezing) -15ºC to 70ºC (non-freezing) 10%RH to 80%RH (non-condensing) 10%RH to 90%RH (non-condensing) Indoor (no direct sunlight); No corrosive gas, inflammable gas, oil mist or dust. ACD62-60 Unit Performance Parameters Mechanical Parameters Back EMF Constant ±10% Torque Constant ±10% Peak Torque Continuous Torque @100°C Motor Constant @25°C Resistance (L-L) @25℃ ±10% Inductance (L-L) ±20% Electrical Time Constant Continuous Power Dissipation @100ºC Max. Coil Temperature Thermal Dissipation Constant Max. Bus Voltage Pole Number Overall Mass Rotor Inertia Rec. Max. Speed @48 VDC (Digital / SINCOS) Continuous Current @100°C Peak Current Kt Ke Km R25 τe T cn T pk Icn Jr Ipk P cn t max Kthn Ubus Ωmax L 2P mn - - - - - - - - - - - - Symbol D Y 1 2 3 Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment. Resistance is measured by DC current with standard 3 m cable. Inductance is measured by current frequency of 1 kHz. 4 The value is based on ABI optical SIN/COS encoder (4096x interpolation) under max. bus voltage. 7 Based on ABI optical SIN/COS encoder (4096x interpolation) with standard runout. 5 The runout value in parenthesis is optional. 6 Please refer to the illustration for different mountings. The contents of datasheet are subjected to change without prior notice. Nm Nm Nm/Arms Vpeak/rpm Nm/Sqrt(W) Ω mH ms Arms Arms W ℃ W/℃ Vdc rpm kg - kg·m 2 Nm Nm N N μm μm 0.115 0.40 0.024 0.002 0.023 0.73 0.073 0.10 4.8 16.8 32.6 100 0.435 48.0 8 1200 12 2.157E-05 0.50 10 50 5 0.3 0.05 1620 +/-6 +/-3 129600 259200 648000 0.115 0.40 0.042 0.004 0.028 1.51 0.195 0.13 2.8 9.7 22.4 100 0.298 48.0 8 1200 12 2.157E-05 0.50 10 50 5 0.3 0.05 1620 +/-6 +/-3 129600 259200 648000 2 3 4 1 1 1 1 5 5 6 7 7 Mounting Illustration Upright Mount Inverted Mount Wall Mount 178 Introduction Sizing Guide Frequently Asked Questions Voice Coil Motors Direct Drive Rotary Motors Motion Control of Gantry Stages Linear Motors Direct drive zero cogging coreless motor Precise homing through index pulse No cogging torque Smooth motion even at low speeds (low velocity ripple) Note:Frameless ACD-P series motors are available, consisting of only rotors and stators.
Transcript of 3.5 ACD Series - Amazon Web Services

62.0
51.0
12.0 THRU12.0 H7 7.0
7.5 4.04× 4.5 THRU
5 ×M3 5.0Equally spaced
on PCD 20.0
Standard cable length= 3.0m- Motor cable = 6.0- Hall cable = 3.8- Encoder cable = 4.0
60.0±0.15
1.0
34.0
-0.0
50.
00
62.0
11.70.012 A
0.010
A
B
00.10.20.30.40.5
0 200 400 600 800 1000 1200 1400
Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD62-60 Detla Connection DC Bus Voltage 48V
Continuous Torque Peak Torque
00.10.20.30.40.5
0 200 400 600 800 1000 1200 1400
Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD62-60 Star Connection DC Bus Voltage 48V
Continuous Torque Peak Torque
Note:Frameless ACD-P series motors are available, consisting of only rotors and stators.
SERIESACD
Dimension
Torque-Speed Curve
ACD SeriesACD62-60
Other Information
Encoder ParametersABI Optical Incremental Encoder (SIN/COS)ABI Optical Incremental Encoder (80x)ABI Optical Incremental Encoder (160x)ABI Optical Incremental Encoder (400x)
Repeatability
Max. Moment Load (Inverted / Wall Mounting) Max. Moment Load (Upright Mounting)Max. Axial Load (Inverted / Wall Mounting)Max. Axial Load (Upright Mounting)Radial RunoutAxial Runout
Insulation ClassProtection Grade
Ambient Temperature
Ambient Humidity
Recommended Ambience
Accuracy after Error Mapping
Compliance with Global Standards
lines / revcounts / revcounts / revcounts / rev
arc secarc sec
OperationStorageOperationStorage
Class B (130ºC) IP40
RoHS, CE0ºC to 40ºC (non-freezing)
-15ºC to 70ºC (non-freezing)10%RH to 80%RH (non-condensing)10%RH to 90%RH (non-condensing)
Indoor (no direct sunlight);No corrosive gas, inflammable gas, oil mist or dust.
ACD62-60UnitPerformance Parameters
Mechanical Parameters
Back EMF Constant ±10%Torque Constant ±10%Peak TorqueContinuous Torque @100°C
Motor Constant @25°CResistance (L-L) @25℃ ±10%Inductance (L-L) ±20%Electrical Time Constant
Continuous Power Dissipation @100ºCMax. Coil TemperatureThermal Dissipation ConstantMax. Bus VoltagePole Number
Overall MassRotor Inertia
Rec. Max. Speed @48 VDC (Digital / SINCOS)
Continuous Current @100°CPeak Current
Kt
Ke
Km
R25
τe
Tcn
Tpk
Icn
Jr
Ipk
Pcn
tmax
Kthn
Ubus
Ωmax
L
2P
mn
------
------
Symbol D Y
123
Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment.Resistance is measured by DC current with standard 3 m cable.Inductance is measured by current frequency of 1 kHz.
4 The value is based on ABI optical SIN/COS encoder (4096x interpolation) under max. bus voltage.
7 Based on ABI optical SIN/COS encoder (4096x interpolation) with standard runout.
5 The runout value in parenthesis is optional.6 Please refer to the illustration for different mountings.
The contents of datasheet are subjected to change without prior notice.
NmNm
Nm/ArmsVpeak/rpm
Nm/Sqrt(W)Ω
mHms
ArmsArms
W℃
W/℃Vdc
rpm
kg
-
kg·m2
NmNmNN
μmμm
0.1150.40
0.0240.0020.023
0.730.073
0.104.8
16.832.6100
0.43548.0
81200
122.157E-05
0.50
1050
50.3
0.05
1620
+/-6+/-3
129600259200648000
0.1150.40
0.0420.0040.028
1.510.195
0.132.89.7
22.4100
0.29848.0
8
1200
122.157E-05
0.50
1050
50.3
0.05
1620
+/-6+/-3
129600259200648000
2
3
4
1
1
1
1
5
5
6
7
7
Mounting Illustration
Upright Mount Inverted Mount Wall Mount
178
Intr
oduc
tion
Sizi
ng G
uide
Freq
uent
ly A
sked
Que
stio
nsVo
ice
Coil
Mot
ors
Dire
ct D
rive
Rota
ry M
otor
sM
otio
n Co
ntro
l of G
antr
y St
ages
Line
ar M
otor
s
Direct drive zero cogging coreless motor
Precise homing through index pulse
No cogging torque
Smooth motion even at low speeds
(low velocity ripple)
Note:Frameless ACD-P series motors are available, consisting of only rotors and stators.

0
0.5
1
1.5
0 200 400 600 800 1000 1200 1400
Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD62-84 Detla Connection DC Bus Voltage 48V
Continuous Torque Peak Torque
Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD62-84 Star Connection DC Bus Voltage 48V
Continuous Torque Peak Torque
0
0.5
1
1.5
0 200 400 600 800 1000 1200 1400
62.0
51.0
12.0 THRU12.0 H7 7.0
7.5 4.04× 4.5 THRU
5 ×M3 5.0Equally spacedon PCD 20.0 84.0±0.15
1.0
34.0
0-0.
050.
00
62.0
9.00.010 0.012 A
A
B
Standard cable length= 3.0m- Motor cable = 6.0- Hall cable = 3.8- Encoder cable = 4.0
Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD120-80 Detla Connection DC Bus Voltage 310V
Continuous Torque Peak Torque
Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD120-80 Star Connection DC Bus Voltage 310V
Continuous Torque Peak Torque
0
2
4
6
8
0 200 400 600 800 1000
01234567
0 200 400 600 800 1000
on PCD 60.08×M4×0.7 8.025.0 THRU
25.0 H7 8.0175.0
120.
0
87.4
-0.0
50.
00
1.0
0.010
0.012 A
AB
on PCD 85.0 8 ×M4×0.7 6.0
Standard cable length= 3.0m- Motor cable = 6.0- Hall cable = 3.8- Encoder cable = 4.0
0.030 B
ACD SeriesACD SeriesACD62-84
0.3411.19
0.0710.0060.058
1.010.144
0.144.8
16.844.8100
0.59748.0
81200
123.944E-05
0.80
1050
50.3
0.05
1620
+/-6+/-3
129600259200648000
0.3411.19
0.1230.0110.068
2.210.316
0.142.89.7
32.7100
0.43648.0
81200
123.944E-05
0.80
1050
50.3
0.05
1620
+/-6+/-3
129600259200648000
Other Information
Encoder ParametersABI Optical Incremental Encoder (SIN/COS)ABI Optical Incremental Encoder (80x)ABI Optical Incremental Encoder (160x)ABI Optical Incremental Encoder (400x)
Repeatability
Max. Moment Load (Inverted / Wall Mounting) Max. Moment Load (Upright Mounting)Max. Axial Load (Inverted / Wall Mounting)Max. Axial Load (Upright Mounting)Radial RunoutAxial Runout
Insulation ClassProtection Grade
Ambient Temperature
Ambient Humidity
Recommended Ambience
Accuracy after Error Mapping
Compliance with Global Standards
lines / revcounts / revcounts / revcounts / rev
arc secarc sec
OperationStorageOperationStorage
Class B (130ºC) IP40
RoHS, CE0ºC to 40ºC (non-freezing)
-15ºC to 70ºC (non-freezing)10%RH to 80%RH (non-condensing)10%RH to 90%RH (non-condensing)
Indoor (no direct sunlight);No corrosive gas, inflammable gas, oil mist or dust.
ACD62-84UnitPerformance Parameters
Mechanical Parameters
Back EMF Constant ±10%Torque Constant ±10%Peak TorqueContinuous Torque @100°C
Motor Constant @25°CResistance (L-L) @25℃ ±10%Inductance (L-L) ±20%Electrical Time Constant
Continuous Power Dissipation @100ºCMax. Coil TemperatureThermal Dissipation ConstantMax. Bus VoltagePole Number
Overall MassRotor Inertia
Rec. Max. Speed @48 VDC (Digital / SINCOS)
Continuous Current @100°CPeak Current
Kt
Ke
Km
R25
τe
Tcn
Tpk
Icn
Jr
Ipk
Pcn
tmax
Kthn
Ubus
Ωmax
L
2P
mn
------
------
Symbol D Y
123
Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment.Resistance is measured by DC current with standard 3 m cable.Inductance is measured by current frequency of 1 kHz.
4 The value is based on ABI optical SIN/COS encoder (4096x interpolation) under max. bus voltage.
7 Based on ABI optical SIN/COS encoder (4096x interpolation) with standard runout.
5 The runout value in parenthesis is optional.6 Please refer to the illustration for different mountings.
The contents of datasheet are subjected to change without prior notice.
NmNm
Nm/ArmsVpeak/rpm
Nm/Sqrt(W)Ω
mHms
ArmsArms
W℃
W/℃Vdc
rpm
kg
-
kg·m2
NmNmNN
μmμm
2
3
4
1
1
1
1
5
5
6
7
7
Dimension
Torque-Speed CurveACD120-80
Dimension
Torque-Speed Curve
Other Information
Encoder ParametersABI Optical Incremental Encoder (SIN/COS)ABI Optical Incremental Encoder (80x)ABI Optical Incremental Encoder (160x)ABI Optical Incremental Encoder (400x)
Repeatability
Max. Moment Load (Inverted / Wall Mounting) Max. Moment Load (Upright Mounting)Max. Axial Load (Inverted / Wall Mounting)Max. Axial Load (Upright Mounting)Radial RunoutAxial Runout
Insulation ClassProtection Grade
Ambient Temperature
Ambient Humidity
Recommended Ambience
Accuracy after Error Mapping
Compliance with Global Standards
lines / revcounts / revcounts / revcounts / rev
arc secarc sec
OperationStorageOperationStorage
Class B (130ºC) IP40
RoHS, CE0ºC to 40ºC (non-freezing)
-15ºC to 70ºC (non-freezing)10%RH to 80%RH (non-condensing)10%RH to 90%RH (non-condensing)
Indoor (no direct sunlight);No corrosive gas, inflammable gas, oil mist or dust.
ACD120-80UnitPerformance Parameters
Mechanical Parameters
Back EMF Constant ±10%Torque Constant ±10%Peak TorqueContinuous Torque @100°C
Motor Constant @25°CResistance (L-L) @25℃ ±10%Inductance (L-L) ±20%Electrical Time Constant
Continuous Power Dissipation @100ºCMax. Coil TemperatureThermal Dissipation ConstantMax. Bus VoltagePole Number
Overall MassRotor Inertia
Rec. Max. Speed @230 VAC (Digital / SINCOS)
Continuous Current @100°CPeak Current
Kt
Ke
Km
R25
τe
Tcn
Tpk
Icn
Jr
Ipk
Pcn
tmax
Kthn
Ubus
Ωmax
L
2P
mn
------
------
Symbol D Y
123
Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment.Resistance is measured by DC current with standard 3 m cable.Inductance is measured by current frequency of 1 kHz.
4 The value is based on ABI optical SIN/COS encoder (4096x interpolation) under max. bus voltage.
7 Based on ABI optical SIN/COS encoder (4096x interpolation) with standard runout.
5 The runout value in parenthesis is optional.6 Please refer to the illustration for different mountings.
The contents of datasheet are subjected to change without prior notice.
NmNm
Nm/ArmsVpeak/rpm
Nm/Sqrt(W)Ω
mHms
ArmsArms
W℃
W/℃Vdc
rpm
kg
-
kg·m2
NmNmNN
μmμm
2
3
4
1
1
1
1
5
5
6
7
7
Mounting Illustration
Upright Mount Inverted Mount Wall Mount
Mounting Illustration
Upright Mount Inverted Mount Wall Mount
IntroductionSizing Guide
Frequently Asked Questions
Voice Coil Motors
Direct Drive Rotary Motors
Motion Control of Gantry Stages
Linear Motors
Intr
oduc
tion
Sizi
ng G
uide
Freq
uent
ly A
sked
Que
stio
nsVo
ice
Coil
Mot
ors
Dire
ct D
rive
Rota
ry M
otor
sM
otio
n Co
ntro
l of G
antr
y St
ages
Line
ar M
otor
s
6.461.85
0.360.0310.220
1.800.628
0.355.1
17.990.4100
1.205330.0
12952
6.461.85
0.630.0540.238
4.641.900
0.412.9
10.377.7100
1.036330.0
12952
151.08E-03
3.2
10150
1510
1.0
151.08E-03
3.2
10150
1510
1.0
2868
+/-6+/-3
229440458880
1147200
2868
+/-6+/-3
229440458880
1147200
179 180

Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD120-175 Detla Connection DC Bus Voltage 310V
Continuous Torque Peak Torque
Torq
ue (N
m)
Speed (rpm)
Torque Speed Curve ACD120-175 Star Connection DC Bus Voltage 310V
Continuous Torque Peak Torque
on PCD 60.08×M4×0.7 8.025.0 THRU
25.0 H7 8.0175.0
120.
0
87.4-
0.05
0.00
1.0
0.010
0.012 A
AB
on PCD 85.0 8×M4×0.7 6.0
Standard cable length= 3.0m- Motor cable = 6.0- Hall cable = 3.8- Encoder cable = 4.0
0.030 B
05
101520253035
0 50 100 150 200 250
05
101520253035
0 50 100 150 200 250
1 H GREY2 H YELLOW34 5VDC RED5 0VDC BLACK
- M1 YELLOW / GREY- M2 BLUE / ORANGE- M3 RED / GREEN- PE YELLOW / GREEN
M1M2M3PE
DSUB 15 PINS( MALE )
DSUB 9 PINS( MALE )
HALL
ENCODER
MOTOR
HALL CABLEMOTOR CABLE
THERMAL SENSOR WIRE ( K TYPE - PT100 )
DESCRIPTIONPIN COLORDESCRIPTIONPIN COLOR
12 5VDC5 A+4 A-
10 B+9 B-
14 Z+15 Z-13 0VDC
12 5VDC8 SINE+
15 SINE-7 COSINE+
14 COSINE-2 INDEX+1 INDEX-
13 0VDC
AB ( DIGITAL )
AB ( SIN / COS )
PIN DESCRIPTION
PI DESCRIPTION
H BLUE
Motor Cable Option:
Hall Cable Option:
ACD120-175
ACD SeriesACD Series
Dimension
Torque-Speed Curve
Motor Cable Connection
Part Numbering
Thermal Sensor:
Connection:
ACD62-60 / 84Motor Model:
AB-1620Encoder Option:
Interpolation Option:
ACD62-84-D-K-NH-3.0-FB-AB-1620-160X
D = Delta/Y = Wye
NH / H9D
K= PT100 (RTD)
Motor Cable Option:
Cable length (m):3.0
Hall Cable Option:
SINCOS / 80X / 160X / 400X
NH / H9D
FB
FBThermal Sensor:
Connection:
ACD120-80 / 175Motor Model:
AB-2868Encoder Option:
Interpolation Option:
ACD120-80-Y-J-H9D-3.0-FB-AB-2868-SINCOS
J = Thermostat (Standard)/ K= PT100 (RTD)
Cable length (m):3.0
SINCOS / 80X / 160X / 400X
FB = With ferrite bead.
123
NH = Without Built-in Hall Sensor but with Thermal Sensor.H9D = With Built-in hall sensor, comes with 9-Pins D-Sub Connector.
Other Information
Encoder ParametersABI Optical Incremental Encoder (SIN/COS)ABI Optical Incremental Encoder (80x)ABI Optical Incremental Encoder (160x)ABI Optical Incremental Encoder (400x)
Repeatability
Max. Moment Load (Inverted / Wall Mounting) Max. Moment Load (Upright Mounting)Max. Axial Load (Inverted / Wall Mounting)Max. Axial Load (Upright Mounting)Radial RunoutAxial Runout
Insulation ClassProtection Grade
Ambient Temperature
Ambient Humidity
Recommended Ambience
Accuracy after Error Mapping
Compliance with Global Standards
lines / revcounts / revcounts / revcounts / rev
arc secarc sec
OperationStorageOperationStorage
Class B (130ºC) IP40
RoHS, CE0ºC to 40ºC (non-freezing)
-15ºC to 70ºC (non-freezing)10%RH to 80%RH (non-condensing)10%RH to 90%RH (non-condensing)
Indoor (no direct sunlight);No corrosive gas, inflammable gas, oil mist or dust.
ACD120-175UnitPerformance Parameters
Mechanical Parameters
Back EMF Constant ±10%Torque Constant ±10%Peak TorqueContinuous Torque @100°C
Motor Constant @25°CResistance (L-L) @25℃ ±10%Inductance (L-L) ±20%Electrical Time Constant
Continuous Power Dissipation @100ºCMax. Coil TemperatureThermal Dissipation ConstantMax. Bus VoltagePole Number
Overall MassRotor Inertia
Rec. Max. Speed @230 VAC (Digital / SINCOS)
Continuous Current @100°CPeak Current
Kt
Ke
Km
R25
τe
Tcn
Tpk
Icn
Jr
Ipk
Pcn
tmax
Kthn
Ubus
Ωmax
L
2P
mn
------
------
Symbol D Y
123
Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment.Resistance is measured by DC current with standard 3 m cable.Inductance is measured by current frequency of 1 kHz.
4 The value is based on ABI optical SIN/COS encoder (4096x interpolation) under max. bus voltage.
7 Based on ABI optical SIN/COS encoder (4096x interpolation) with standard runout.
5 The runout value in parenthesis is optional.6 Please refer to the illustration for different mountings.
The contents of datasheet are subjected to change without prior notice.
NmNm
Nm/ArmsVpeak/rpm
Nm/Sqrt(W)Ω
mHms
ArmsArms
W℃
W/℃Vdc
rpm
kg
-
kg·m2
NmNmNN
μmμm
2
3
4
1
1
1
1
5
5
6
7
7
Mounting Illustration
Upright Mount Inverted Mount Wall Mount
21
21
3
3
181 182
IntroductionSizing Guide
Frequently Asked Questions
Voice Coil Motors
Direct Drive Rotary Motors
Motion Control of Gantry Stages
Linear Motors
Intr
oduc
tion
Sizi
ng G
uide
Freq
uent
ly A
sked
Que
stio
nsVo
ice
Coil
Mot
ors
Dire
ct D
rive
Rota
ry M
otor
sM
otio
n Co
ntro
l of G
antr
y St
ages
Line
ar M
otor
s
D = Delta/Y = Wye
32.259.22
1.810.1540.736
4.021.873
0.475.1
17.9202.4
1002.698330.0
12220
32.259.22
3.130.2680.73612.075.619
0.472.9
10.3202.1
1002.695330.0
12220
153.21E-03
7.0
10150
1510
1.0
153.21E-03
7.0
10150
1510
1.0
2868
+/-6+/-3
229440458880
1147200
2868
+/-6+/-3
229440458880
1147200

on PCD 60.0M4×0.7 THRU ALL
on PCD 112.06×M4×0.7 12.0
6.02× 3.0 H7
3.0 H7 THRU ALLon PCD 60.0
30.0°60.00°
A
A
Hall Sensor and Thermal Sensor CableOD: 3.8Length: 3.0mTermination: Flying leads(Refer to Wiring Diagram for detail)
Motor CableOD: 6.0Length: 3.0mFerrite Bead: YesTermination: Flying Leads(Refer to Wiring Diagram for detail)
52.0
0.00
+0.0
583
.6±0.
1585
.0-0
.2+0
.712
0.0
f9-0
.12
-0.0
4
45.0-0.3+0.2
20.0±0.158.5 22.0 ±0.15
71.0
+ -0.7
0.2
SECTION A-A
C
D
E F
0.0350.04 C
0.03
0.0350.04 E0.03
0.03 C
0.03 E
M3×0.5 - 6H THRU ALL6 × 2.3 THRU ALL
6.02× 3.0 H7
6 × M3×0.5 6.0
55.0
30.0°
A
A Hall Sensor and Thermal Sensor CableOD: 3.8Length: 3.0mTermination: Flying leads(Refer to Wiring Diagram for detail)
Motor CableOD: 6.0Length: 3.0mFerrite Bead: YesTermination: Flying Leads(Refer to Wiring Diagram for detail)
12.0
0.00
+0.0
5
36.0
-0.2
+0.7
62.0
f9-0
.10
-
-
0.03
29.5-0.3+0.2
10.0±0.155.7
12.0±0.15
24.0
-0.2
+0.7
22.0
±0.
1534
.6±
0.15
SECTION A-A
C
D
E
F0.0350.04 E
0.03 E
0.03
0.03
0.0350.04 C
Note:User to ensure the concentricity of stator and rotor to be within 0.15mm when mounted; User to ensure flatness of mounting surface within 0.015/300mm;User to ensure perpendicularity of rotor inner bore relative to datum E within 0.1mm when mounted; The cable diameter tolerance +0.3, and cable length tolerance +60.0
1234
Note:User to ensure the concentricity of stator and rotor to be within 0.15mm when mounted; User to ensure flatness of mounting surface within 0.015/300mm;User to ensure perpendicularity of rotor inner bore relative to datum E within 0.1mm when mounted; The cable diameter tolerance +0.3, and cable length tolerance +60.0
1234
Note:User to ensure the concentricity of stator and rotor to be within 0.15mm when mounted; User to ensure flatness of mounting surface within 0.015/300mm;User to ensure perpendicularity of rotor inner bore relative to datum E within 0.1mm when mounted; The cable diameter tolerance +0.3, and cable length tolerance +60.0
1234
Both sides6×M3×0.5 6.0 6×M3×0.5 - 6H 6.0
2× 3.0 H7 6.0
55.0
30.0°
A
AHall Sensor and Thermal Sensor CableOD: 3.8Length: 3.0mTermination: Flying leads
Motor CableOD: 6.0Length: 3.0mFerrite Bead: YesTermination: Flying Leads(Refer to Wiring Diagram for detail)
(Refer to Wiring Diagram for detail)
0.03 E
12.0
0.00
+0.0
5
36.0
-0.2
+0.7
62.0
f 9-0
.10
-0.0
3
49.5-0.3+0.2
30.0±0.155.7 32.0±0.15
24.0
-0.2
+0.7
22.0
±0.
1534
.6±
0.15
SECTION A-A
0.03
0.04
0.0350.04 E
C
D
E F
0.0350.04 C
2
3
1
1
1
1
123
Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment.Resistance is measured by DC current with standard 3 m cable.Inductance is measured by current frequency of 1 kHz.
The contents of datasheet are subjected to change without prior notice.
ACD62-P-10
2
3
1
1
1
1
123
Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment.Resistance is measured by DC current with standard 3 m cable.Inductance is measured by current frequency of 1 kHz.
The contents of datasheet are subjected to change without prior notice.
Other InformationInsulation ClassProtection Grade
Ambient Temperature
Ambient Humidity
Recommended Ambience
Compliance with Global StandardsOperationStorageOperationStorage
Class B (130ºC) IP00
RoHS, CE0ºC to 40ºC (non-freezing)
-15ºC to 70ºC (non-freezing)10%RH to 80%RH (non-condensing)10%RH to 90%RH (non-condensing)
Indoor (no direct sunlight);No corrosive gas, inflammable gas, oil mist or dust.
ACD62-P-10UnitPerformance Parameters
Mechanical Parameters
Back EMF Constant ±10%Torque Constant ±10%Peak TorqueContinuous Torque @100°C
Motor Constant @25°CResistance (L-L) @25℃ ±10%Inductance (L-L) ±20%Electrical Time Constant
Continuous Power Dissipation @100ºCMax. Coil TemperatureThermal Dissipation ConstantMax. Bus VoltagePole Number
Overall MassRotor Inertia
Continuous Current @100°CPeak Current
Kt
Ke
Km
R25
τe
Tcn
Tpk
Icn
Jr
Ipk
Pcn
tmax
Kthn
Ubus
L
2P
mn
Symbol D YNmNm
Nm/ArmsVpeak/rpm
Nm/Sqrt(W)Ω
mHms
ArmsArms
W℃
W/℃Vdc
kg
-
kg·m2
2
3
1
1
1
1
123
Measurement is taken at ambient temperature 25℃. Value depends on the thermal environment.Resistance is measured by DC current with standard 3 m cable.Inductance is measured by current frequency of 1 kHz.
The contents of datasheet are subjected to change without prior notice.
Other InformationInsulation ClassProtection Grade
Ambient Temperature
Ambient Humidity
Recommended Ambience
Compliance with Global StandardsOperationStorageOperationStorage
Class B (130ºC) IP00
RoHS, CE0ºC to 40ºC (non-freezing)
-15ºC to 70ºC (non-freezing)10%RH to 80%RH (non-condensing)10%RH to 90%RH (non-condensing)
Indoor (no direct sunlight);No corrosive gas, inflammable gas, oil mist or dust.
ACD120-P-20UnitPerformance Parameters
Mechanical Parameters
Back EMF Constant ±10%Torque Constant ±10%Peak TorqueContinuous Torque @100°C
Motor Constant @25°CResistance (L-L) @25℃ ±10%Inductance (L-L) ±20%Electrical Time Constant
Continuous Power Dissipation @100ºCMax. Coil TemperatureThermal Dissipation ConstantMax. Bus VoltagePole Number
Overall MassRotor Inertia
Continuous Current @100°CPeak Current
Kt
Ke
Km
R25
τe
Tcn
Tpk
Icn
Jr
Ipk
Pcn
tmax
Kthn
Ubus
L
2P
mn
Symbol D YNmNm
Nm/ArmsVpeak/rpm
Nm/Sqrt(W)Ω
mHms
ArmsArms
W℃
W/℃Vdc
kg
-
kg·m2
0.1150.40
0.0240.0020.023
0.730.073
0.104.8
16.832.6100
0.43548.0
8
9.714E-060.5
0.1150.40
0.0420.0040.028
1.510.195
0.132.89.7
22.4100
0.29848.0
8
9.714E-060.5
DimensionACD120-P-20
Dimension
ACD62-P-30
0.3411.19
0.0710.0060.058
1.010.144
0.144.8
16.844.8100
0.59748.0
8
2.883E-050.8
0.3411.19
0.1230.0110.068
2.210.316
0.142.89.7
32.7100
0.43648.0
8
2.883E-050.8
Other InformationInsulation ClassProtection Grade
Ambient Temperature
Ambient Humidity
Recommended Ambience
Compliance with Global StandardsOperationStorageOperationStorage
Class B (130ºC) IP00
RoHS, CE0ºC to 40ºC (non-freezing)
-15ºC to 70ºC (non-freezing)10%RH to 80%RH (non-condensing)10%RH to 90%RH (non-condensing)
Indoor (no direct sunlight);No corrosive gas, inflammable gas, oil mist or dust.
ACD62-P-30UnitPerformance Parameters
Mechanical Parameters
Back EMF Constant ±10%Torque Constant ±10%Peak TorqueContinuous Torque @100°C
Motor Constant @25°CResistance (L-L) @25℃ ±10%Inductance (L-L) ±20%Electrical Time Constant
Continuous Power Dissipation @100ºCMax. Coil TemperatureThermal Dissipation ConstantMax. Bus VoltagePole Number
Overall MassRotor Inertia
Continuous Current @100°CPeak Current
Kt
Ke
Km
R25
τe
Tcn
Tpk
Icn
Jr
Ipk
Pcn
tmax
Kthn
Ubus
L
2P
mn
Symbol D YNmNm
Nm/ArmsVpeak/rpm
Nm/Sqrt(W)Ω
mHms
ArmsArms
W℃
W/℃Vdc
kg
-
kg·m2
Dimension
ACD Series-1 Frameless ACD-P ACD Series-1 Frameless ACD-P
Mounting Illustration
Upright Mount Inverted Mount Wall Mount
Mounting Illustration
Upright Mount Inverted Mount Wall Mount
Mounting Illustration
Upright Mount Inverted Mount Wall Mount
183 184
IntroductionSizing Guide
Frequently Asked Questions
Voice Coil Motors
Direct Drive Rotary Motors
Motion Control of Gantry Stages
Linear Motors
Intr
oduc
tion
Sizi
ng G
uide
Freq
uent
ly A
sked
Que
stio
nsVo
ice
Coil
Mot
ors
Dire
ct D
rive
Rota
ry M
otor
sM
otio
n Co
ntro
l of G
antr
y St
ages
Line
ar M
otor
s
1.856.460.36
0.0310.220
1.800.628
0.355.1
17.990.4100
1.205330.0
12
5.950E-043.2
1.856.460.63
0.0540.238
4.641.900
0.412.9
10.377.7100
1.036330.0
12
5.950E-043.2

MOTOR
HALL
PEM3M2M1
* DEFAULT - FLYING LEADS OPTION - DSUB 9 PINS ( MALE )
MOTOR CABLEDESCRIPTIONPIN COLOR
- M1 YELLOW / GREY- M2 BLUE / ORANGE- M3 RED / GREEN- PE YELLOW / GREEN
HALL CABLEDESCRIPTIONPIN COLOR
1 HA GREY2 HB YELLOW3 HC BLUE4 5VDC RED5 0VDC BLACK
THERMAL SENSOR WIRE ( K TYPE - PT100 )
ACD Series-1 Frameless ACD-P
Thermal Sensor:
Connection:
ACD62-P-10/ACD62-P-30Motor Model:
ACD62-P-10-D-K-NH-3.0-FB
K= PT100 (RTD)
Motor Cable Option:
Cable length (m):3.0
Hall Cable Option: HF / NH
HF / NH
FB
FB
Thermal Sensor:
Connection:
ACD120-P-20Motor Model:
ACD120-P-20-Y-J-HF-3.0-FB
J = Thermostat (Standard)K= PT100 (RTD)
Motor Cable Option:
Cable length (m):3.0
Hall Cable Option:
FB = With ferrite bead.
123
HF= With Built-in hall sensor & hall cable comes with flying leads.NH = Without Built-in Hall Sensor but with Thermal Sensor.
Part Numbering
Motor Cable Connection
21
3
21
3
185
IntroductionSizing Guide
Frequently Asked Questions
Voice Coil Motors
Direct Drive Rotary Motors
Motion Control of Gantry Stages
Linear Motors
D = Delta/Y = Wye
D = Delta/Y = Wye





![LCD-Array Kit MEAT 5.0 - Specificity - CHIPRON GmbH · Donkey: ACD-005-025 Goat: ACD-006-025 Camel: ACD-007-025 Buffalo: ACD-008-025 [Equus asinus ] [Capra hircus ] [Camelus dromedarius](https://static.fdocuments.us/doc/165x107/60608c3fab6e5a6d06647729/lcd-array-kit-meat-50-specificity-chipron-gmbh-donkey-acd-005-025-goat-acd-006-025.jpg)