2D Elasticity Theory - University of British...
11
Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca 2D Elasticity Theory Updated May 22, 2019 Page 1 2D Elasticity Theory The 2D elasticity problem is here formulated in the x-y coordinate system using the notation shown in Figure 1. u(x,y) and v(x,y) are the displacements in the x and y directions, respectively. Similarly, px(x,y) and py(x,y) are the distributed loads in those directions. Figure 1: Ingredients of the 2D boundary value problem. Material Law Hooke’s law for 2D continuum problems has two versions: plane stress and plane strain. Plane stress applies when there are no stresses perpendicular to the considered plane. This applies to thin planar members that do not have stresses imposed perpendicular to the surface. One example is a deep beam that stretches along the x-axis with z as the vertical axis. Seen from the side this beam forms a 2D continuum problem in the x-z-plane with plane stress material law because there is no stress perpendicular to the sides of the beam. Conversely, plane strain implies that there is zero strain perpendicular to the plane under consideration. This applies to problems where the plane is a cross-section of a structure that is long in the direction perpendicular to that plane. One example is the modelling of the cross-section of a dam structure. From the selected cross-section the dam stretches out to both sides until it meets mountainside supports. This restrains displacement, and hence strain, perpendicular to the x-y-plane That plane is then in a state of plane strain, i.e., without strain perpendicular to the plane. Plane Stress The plane stress version of the material law is the straightforward simplification of the material law for 3D problems when one coordinate is removed: ε xx ε yy γ xy ⎧ ⎨ ⎪ ⎪ ⎩ ⎪ ⎪ ⎫ ⎬ ⎪ ⎪ ⎭ ⎪ ⎪ u v ⎧ ⎨ ⎩ ⎫ ⎬ ⎭ Kinematic compatibility Material law σ xx σ yy τ xy ⎧ ⎨ ⎪ ⎪ ⎩ ⎪ ⎪ ⎫ ⎬ ⎪ ⎪ ⎭ ⎪ ⎪ p x p y ⎧ ⎨ ⎪ ⎩ ⎪ ⎫ ⎬ ⎪ ⎭ ⎪ Equilibrium
Transcript of 2D Elasticity Theory - University of British...

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 1
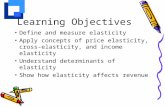
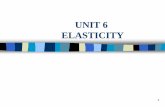
2D Elasticity Theory The 2D elasticity problem is here formulated in the x-y coordinate system using the notation shown in Figure 1. u(x,y) and v(x,y) are the displacements in the x and y directions, respectively. Similarly, px(x,y) and py(x,y) are the distributed loads in those directions.
Figure 1: Ingredients of the 2D boundary value problem.
Material Law Hooke’s law for 2D continuum problems has two versions: plane stress and plane strain. Plane stress applies when there are no stresses perpendicular to the considered plane. This applies to thin planar members that do not have stresses imposed perpendicular to the surface. One example is a deep beam that stretches along the x-axis with z as the vertical axis. Seen from the side this beam forms a 2D continuum problem in the x-z-plane with plane stress material law because there is no stress perpendicular to the sides of the beam. Conversely, plane strain implies that there is zero strain perpendicular to the plane under consideration. This applies to problems where the plane is a cross-section of a structure that is long in the direction perpendicular to that plane. One example is the modelling of the cross-section of a dam structure. From the selected cross-section the dam stretches out to both sides until it meets mountainside supports. This restrains displacement, and hence strain, perpendicular to the x-y-plane That plane is then in a state of plane strain, i.e., without strain perpendicular to the plane.
Plane Stress The plane stress version of the material law is the straightforward simplification of the material law for 3D problems when one coordinate is removed:
ε xxε yyγ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
uv
⎧⎨⎩
⎫⎬⎭
Kinematic compatibility
Materiallaw
σ xx
σ yy
τ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
pxpy
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪
Equilibrium

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 2
(1)
where . In Voight notation any 2D material law is written generically in index and vector notation as follows:
(2)
where the D-matrix for plane stress is
(3)
or inversely, directly from Eq. (1):
(4)
Plane Strain When there is zero strain perpendicular to the x-y-plane then the material law reads
(5)
or inversely
(6)
ε xx =σ xx
E−ν ⋅
σ yy
E
ε yy =σ yy
E−ν ⋅
σ xx
Eτ xy = G ⋅γ xy
G = E 2 ⋅(1+ν )( )
σ i = Dij ⋅ε j ⇔ σ = Dε
σ xx
σ yy
σ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
= E1−ν 2
1 ν 0ν 1 0
0 0 1−ν2
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
D! "#### $####
⋅
ε xx
ε yy
γ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
ε xx
ε yy
γ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
= 1E
1 −ν 0−ν 1 00 0 2(1+ν )
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥⋅
σ xx
σ yy
τ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
σ xx
σ yy
σ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
= E(1+ν )(1− 2ν )
1−ν ν 0ν 1−ν 0
0 0 1− 2ν2
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
⋅
ε xx
ε yy
γ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
ε xx
ε yy
γ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
= 1E
1−ν 2 −ν(1+ν ) 0
−ν(1+ν ) 1−ν 2 00 0 2(1+ν )
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
⋅
σ xx
σ yy
σ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 3
Kinematic Compatibility The 2D specialization of the 3D kinematic compatibility equations from the general theory of elasticity is trivial and reads
(7)
Differentiating the first equation twice with respect to y, then differentiating the second equation twice with respect to x, and finally differentiating the third equation with respect to x and y yields
(8)
(9)
(10)
Substituting Eqs. (8) and (9) into Eq. (10) yields the “compatibility equation” that states the necessary relationship between the strains for the deformation pattern to be physically valid:
(11)
That compatibility equation can be reformulated by the introduction of material law, here using the plane stress material law in Eq. (4), which substituted into Eq. (11) yields
(12)
where E cancels and the new compatibility equation simplifies to
(13)
As shown in Section 16 of Timoshenko’s book on the theory of elasticity Eq. (13) can be further modified by introducing equilibrium (Timoshenko and Goodier 1969). To achieve this the first step is to write the equilibrium equations in 2D, a straightforward simplification of the 3D version:
(14)
ε xx
ε yy
γ xy
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
=∂ ∂x 0
0 ∂ ∂y∂ ∂y ∂ ∂x
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
uv
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪
∂2ε xx
∂y2 = ∂3u∂x∂y2
∂2ε yy
∂x2 = ∂3v∂y∂x2
∂2γ xx
∂y∂x= ∂3u∂y2 ∂x
+ ∂3v∂x2 ∂y
∂2γ xy
∂x∂y=∂2ε xx
∂y2 +∂2ε yy
∂x2
∂2
∂x∂y2(1+ν )
E⋅σ xy
⎛⎝⎜
⎞⎠⎟= ∂2
∂y2
σ xx
E−ν ⋅
σ yy
E
⎛
⎝⎜
⎞
⎠⎟ +
∂2
∂x2
σ yy
E−ν ⋅
σ xx
E
⎛
⎝⎜
⎞
⎠⎟
∂2σ xy
∂x∂y⋅2 ⋅(1+ν ) = ∂2
∂y2 (σ xx −ν ⋅σ yy )+ ∂2
∂x2 (σ yy −ν ⋅σ xx )
∂σ xx
∂x+∂σ yx
∂y+ fx = 0

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 4
(15)
Assuming the body forces are uniform and differentiating Eq. (14) with respect to x and Eq. (15) with respect to y yields
(16)
(17)
Adding Eqs. (16) and (17), i.e., adding zero with zero yields
(18)
This equilibrium equation is now solved for , which is substituted into Eq. (13) to obtain the following new compatibility equation:
(19)
Simplification yields the compatibility equation in terms of stresses
(20)
which can be written
(21)
This equation holds also for plane strain and has a non-zero right-hand side when the body forces are not uniform (Timoshenko and Goodier 1969):
(22)
One approach to solve 2D continuum problems is to seek stresses that imply equilibrium and that satisfy the compatibility equations presented above, together with problem-specific boundary conditions. A clever approach to achieve this is a concept called stress functions.
Stress Functions In many boundary value problems in structural mechanics it is possible to combine equilibrium, material law, and kinematic compatibility equations into one governing
∂σ xy
∂x+∂σ yy
∂y+ f y = 0
∂2σ xx
∂x2 +∂2σ yx
∂y∂x= 0
∂2σ xy
∂x∂y+∂2σ yy
∂y2 = 0
2 ⋅
∂2σ xy
∂x∂y+∂2σ yy
∂y2 +∂2σ xx
∂x2 = 0
− 1
2⋅∂2σ yy
∂y2 +∂2σ xx
∂x2
⎛
⎝⎜
⎞
⎠⎟ ⋅2 ⋅(1+ν ) = ∂2
∂y2 (σ xx −ν ⋅σ yy )+ ∂2
∂x2 (σ yy −ν ⋅σ xx )
−∂2σ yy
∂y2 −∂2σ xx
∂x2 =∂2σ xx
∂y2 +∂2σ yy
∂x2
∂2
∂x2 +∂2
∂y2
⎛⎝⎜
⎞⎠⎟σ xx +σ yy( ) = 0
∂2
∂x2 +∂2
∂y2
⎛⎝⎜
⎞⎠⎟σ xx +σ yy( ) = − 1
1−ν∂ fx
∂x+∂ f y
∂y
⎛
⎝⎜
⎞
⎠⎟

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 5
differentiation equation. This equation, together with problem-specific boundary conditions on forces and displacements, are used to obtain solutions. In the 2D theory of elasticity, and certain other problems, an additional helpful concept is the “stress functions” introduced by George Biddell Airy (1801-1892) in an 1862 paper. The stress function itself does not have physical meaning. Instead it is an auxiliary quantity, here denoted j(x,y), from which stresses are derived:
(23)
(24)
(25)
Notice that the double derivative of the stress function in one direction produces axial stress in the perpendicular direction. That is perhaps the most physical interpretation that is possible for the stress function. Next it is interesting to combine the stress function with the equations for equilibrium, material law, and kinematic compatibility. Starting with equilibrium, Eqs. (23)-(25) are substituted into Eqs. (14) and (15) yielding
(26)
(27)
which demonstrates that the equilibrium equations are automatically satisfied with the stress function definition in Eqs. (23)-(25). Only material law and kinematic compatibility remain and those have already been combined in the compatibility equations presented earlier. Substitution of the stress function in Eqs. Eqs. (23)-(25) into the compatibility equation in Eq. (21) and assuming uniform body forces yields
(28)
This equation is the governing equation for 2D continuum problems. Solutions are found by establishing stress functions that satisfy Eq. (28) together with problem-specific boundary conditions. Once the stress function is determined the stresses are found from Eqs. (23)-(25). However, many real in-plane members have shapes and boundary conditions that render such analytical solutions unattainable. The numerical finite element method provides and alternative in those circumstances.
σ xx =
∂2ϕ∂y2 − fx ⋅ x
σ yy =
∂2ϕ∂x2 − f y ⋅ y
τ xy ≡ σ xy = − ∂2ϕ
∂x∂y
d∂2ϕ∂y2 − fx ⋅ x
⎛⎝⎜
⎞⎠⎟
dx+
d − ∂2ϕ∂x∂y
⎛⎝⎜
⎞⎠⎟
dy+ fx =
∂2ϕ∂y2 ∂x
− fx −∂2ϕ
∂x∂y2 + fx = 0
d − ∂2ϕ∂x∂y
⎛⎝⎜
⎞⎠⎟
dx+
d∂2ϕ∂x2 − f y ⋅ y
⎛⎝⎜
⎞⎠⎟
dy+ f y = − ∂2ϕ
∂x2 ∂y+ ∂2ϕ∂x2 ∂y
− f y + f y = 0
∂4ϕ∂x4 + 2 ⋅ ∂4ϕ
∂y2 ∂x2 +∂4ϕ∂y4 = 0

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 6
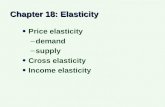
2D Elastic Beams In other documents on this website, the Euler-Bernoulli and Timoshenko beam theories are described. Both those theories assume that plane sections remain plane and perpendicular to the neutral axis. That is not an exact description of reality and this document describes an alternative, based on the 2D theory of elasticity. In particular, a cantilevered beam in the x-z-plane is considered in the following, as shown in Figure 2. In another document on 2D elasticity theory, the 4th-order differential equation for the stress function is derived. Written in terms of x and z it reads
(29)
Figure 2: Beam on elastic foundation.
The solution for specific problems is established by formulating a stress function that satisfies the unique boundary conditions for each problem. As a demonstration, the cantilever in Figure 2 is considered in this section. To simplify the mathematical expressions, the fixed support is on the right-hand side and the load is applied on the left-hand side. A solution for this problem, where the horizontal edges are stress-free and the edge at x=0 has a shear stress resultant P, is obtained by combining the stress function for pure shear and a stress function with a 3rd-order term (Timoshenko and Goodier 1969):
(30)
This stress function yields the following stresses:
(31)
(32)
(33)
Zero stress on the horizontal edges implies that
∂4 F∂x4 + ∂4 F
∂z4 + ∂4 F∂x2 ∂z2 = 0
x
z
P
L
h
F(x, z) = C1 ⋅ x ⋅ z +C2 ⋅ x ⋅ z3
σ xx =
∂2 F∂z2 = 6 ⋅C2 ⋅ x ⋅ z
σ zz =
∂2 F∂x2 = 0
τ xz = − ∂2 F
∂x∂z= −C1 − 3⋅C2 ⋅ z
2

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 7
(34)
Shear stress resultant P at x=0 implies that
(35)
which implies that
(36)
Substitution of C1 and C2 into Eq. (31) yields the axial stress
(37)
where I=h3/12 is introduced for this unit-width beam to echo the notation in elementary beam theory. In fact, the axial stress is distributed exactly as in elementary beam theory. Substitution of C1 and C2 into Eq. (33) yields the shear stress
(38)
where it is observed again that the solution is exactly as in the elementary beam theory, assuming that the load P is applied on the edge distributed according to the parabola in Eq. (38). However, more information is available from this elasticity solution than beam theory. In particular, displacements can be calculated, and these reveal that plane sections do not remain plane during bending. To see this, i.e., to compute the displacements associated with the stresses above, the general kinematics equations are invoked, which read
(39)
(40)
(41)
The material law is also needed, which for plane stress (thin beam in the y-direction) read
(42)
(43)
τ xz (z = ± h
2 ) = −C1 − 3⋅C2 ⋅h2
⎛⎝⎜
⎞⎠⎟
2
= 0 ⇒ C2 = − 43h2 ⋅C1
τ xz (x = 0)dz
− h2
h2
∫ = −C1 − 3⋅C2 ⋅ z2 dz
− h2
h2
∫ = − 2h3
C1 = −P ⇒ C1 =3P2h
C2 = − 4
3⋅h2 ⋅3P2h
= − 2Ph3
σ xx = 6 ⋅C2 ⋅ x ⋅ z = −12P
h3 ⋅ x ⋅ z = − PI⋅ x ⋅ z
τ xz = −C1 − 3⋅C2 ⋅ z
2 = − 3P2h
+ 6Ph3 z2 = − 3P
2h1− 2z
h⎛⎝⎜
⎞⎠⎟
2⎛
⎝⎜
⎞
⎠⎟
ε xx =
∂u∂x
ε zz =
∂w∂z
γ xz =
∂u∂z
+ ∂w∂x
ε xx =
1E⋅ σ xx −ν ⋅σ zz( )
ε zz =
1E⋅ σ zz −ν ⋅σ xx( )

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 8
(44)
where G=E(2(1+n)) is the shear modulus. The material law for plane strain (infinitely thick beam in the y-direction) is obtained by replacing E by E/(1–n2) and n by n/(1–n) (Timoshenko and Goodier 1969), which yields
(45)
(46)
(47)
For the plane stress case, the combination of the kinematics equations (39) to (41) with the material law equations (42) to (44), and substitution of stresses from Eqs. (37) and (38) together with szz=0 yields
(48)
(49)
(50)
Integration of Eqs. (48) and (49) yields the general displacement expressions
(51)
(52)
where hx(x) and hz(z) are functions that represent the integration constants. Substitution of Eqs. (51) and (52) into Eq. (50) yields
(53)
By separating terms that depend on x and z, the following reorganized equation is obtained:
(54)
γ xz =
τ xz
G
ε xx =
1E⋅ (1−ν 2 ) ⋅σ xx −ν ⋅(1+ν ) ⋅σ zz( )
ε zz =
1E⋅ (1−ν 2 ) ⋅σ zz −ν ⋅(1+ν ) ⋅σ xx( )
γ xz =
τ xz
G
ε xx =
∂u∂x
= 1E⋅ σ xx −ν ⋅σ zz( ) = σ xx
E= − P
EI⋅ x ⋅ z
ε zz =
∂w∂z
= 1E⋅ σ zz −ν ⋅σ xx( ) = − 1
E⋅ν ⋅σ xx =
PEI
⋅ν ⋅ x ⋅ z
γ xz =
∂u∂z
+ ∂w∂x
=τ xz
G= − 3P
2Gh1− 2z
h⎛⎝⎜
⎞⎠⎟
2⎛
⎝⎜
⎞
⎠⎟
u(x, z) = − P
EI⋅ x ⋅ z dx∫ = − Pzx2
2EI+ hz (z)
w(x, z) = P
EI⋅ν ⋅ x ⋅ z dz∫ = Pνxz2
2EI+ hx (x)
∂u∂z
+ ∂w∂x
= − Px2
2EI+∂hz (z)∂z
+ Pν z2
2EI+∂hx (x)∂x
= − 3P2Gh
1− 2zh
⎛⎝⎜
⎞⎠⎟
2⎛
⎝⎜
⎞
⎠⎟
− Px2
2EI+∂hx (x)∂x
F ( x )! "## $##
+ Pν z2
2EI+∂hz (z)∂z
− 6Pz2
Gh3
G( z )! "### $###
= − 3P2Gh
K!"$

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 9
where F(x), G(z), and K are defined so that Eq. (53) can be written (Timoshenko and Goodier 1969)
(55)
Because the right-hand side is constant, F(x) and G(z) must also be constants, here named C3 and C4:
(56)
(57)
Integration yields hx(x) and hz(z) expressed in terms of unknown constants:
(58)
(59)
Substitution of the functions hx(x) and hz(z) in Eqs. (58) and (59) into the displacements in Eqs. (51) and (52) yields
(60)
(61)
The constants C3, C4, C5, and C6 are determined from Eq. (55), which says that
(62)
and from three boundary conditions that prevent the beam from displacing as a rigid body. For the beam in Figure 2, it is natural to enforce zero displacements and zero rotation at the point where x=L and z=0. According to Eqs. (60) and (61), zero displacement implies that
(63)
(64)
Interestingly, the zero-rotation-requirement can be imposed in several ways because plane sections do not remain plane and perpendicular to the neutral axis. One option is to require that a vertical line remains vertical:
F(x)+G(z) = K
F(x) = − Px2
2EI+∂hx (x)∂x
= C3 ⇒ ∂hx (x)∂x
= Px2
2EI+C3
G(z) = Pν z2
2EI+∂hz (z)∂z
− 6Pz2
Gh3 = C4 ⇒ ∂hz (z)∂z
= 6Pz2
Gh3 − Pν z2
2EI+C4
hx (x) = Px2
2EI+C3
⎛⎝⎜
⎞⎠⎟
dx∫ = Px3
6EI+C3x +C5
hz (z) = 6Pz2
Gh3 − Pν z2
2EI+C4
⎛⎝⎜
⎞⎠⎟
dz∫ = 2Pz3
Gh3 − Pν z3
6EI+C4z +C6
u(x, z) = − Pzx2
2EI+ 2Pz3
Gh3 − Pν z3
6EI+C4z +C6
w(x, z) = Pνxz2
2EI+ Px3
6EI+C3x +C5
C3 +C4 = − 3P
2Gh
u(L,0) = C6 = 0
w(L,0) = PL3
6EI+C3L+C5 = 0

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 10
(65)
Eq. (62) then yields
(66)
Eq. (64) then yields
(67)
which means that all the constants C3, C4, C5, and C6 are determined and the final displacement expressions are:
(68)
(69)
Another option for enforcing zero rotation at the end is the classical requirement that a horizontal line remains horizontal:
(70)
Eq. (62) then yields
(71)
Eq. (64) then yields
(72)
which means that all the constants C3, C4, C5, and C6 are determined and the final displacement expressions are:
(73)
(74)
It is interesting to note that the tip-deflection of the cantilever equals the classical result PL3/3EI for Eq. (74) while for the solution in Eq. (69) it is
∂u(L,0)
∂z= − PL2
2EI+C4 = 0 ⇒ C4 =
PL2
2EI
C3 = − 3P
2Gh− PL2
2EI
C5 = − PL3
6EI+ 3PL
2Gh+ PL3
2EI= PL3
3EI+ 3PL
2Gh
u(x, z) = − Pzx2
2EI+ 2Pz3
Gh3 − Pν z3
6EI+ PL2
2EI⋅ z
w(x, z) = Pνxz2
2EI+ Px3
6EI+ − 3P
2Gh− PL2
2EI⎛⎝⎜
⎞⎠⎟
x + PL3
3EI+ 3PL
2Gh
∂w(L,0)∂x
= PL2
2EI+C3 = 0 ⇒ C3 = − PL2
2EI
C4 =
PL2
2EI− 3P
2Gh
C5 = − PL3
6EI+ PL3
2EI= PL3
3EI
u(x, z) = − Pzx2
2EI+ 2Pz3
Gh3 − Pν z3
6EI+ PL2
2EI− 3P
2Gh⎛⎝⎜
⎞⎠⎟
z
w(x, z) = Pνxz2
2EI+ Px3
6EI− PL2
2EIx + PL3
3EI

Professor Terje Haukaas The University of British Columbia, Vancouver terje.civil.ubc.ca
2D Elasticity Theory Updated May 22, 2019 Page 11
(75)
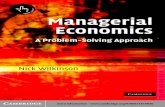
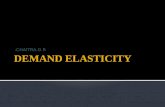
To observe the distortion of a plane cross-section during bending, the deformed shape of an extreme-case beam (h=1m, L=1m, E=200,000N/mm2, n=0.3, P=10MN) is plotted in Figure 3. The solid line shows the solution given by Eq. (68) and shows that the cross-section remains vertical at x=L and z=0. However, for other z-values it has clearly distorted from being a straight line. The dashed line shows the solution given by Eq. (73), where the horizontal line at x=L and z=0 remains horizontal. Note that the angle between the neutral axis and the cross-section at z=0 is obtained from Eq. (69):
(76)
Figure 3: Cross-section distortion in the x-z-plane.
References Timoshenko, S., and Goodier, J. N. (1969). Theory of elasticity. McGraw-Hill.
w(x, z) = PL3
3EI+ 3PL
2Gh
∂w(L,0)∂x
= − 3P2Gh